Applied Engineering Using Schumann Resonance for Earthquakes Monitoring


 ,
,  ,
,  , and
, and 
Abstract
:
1. Introduction
2. Materials and Methods
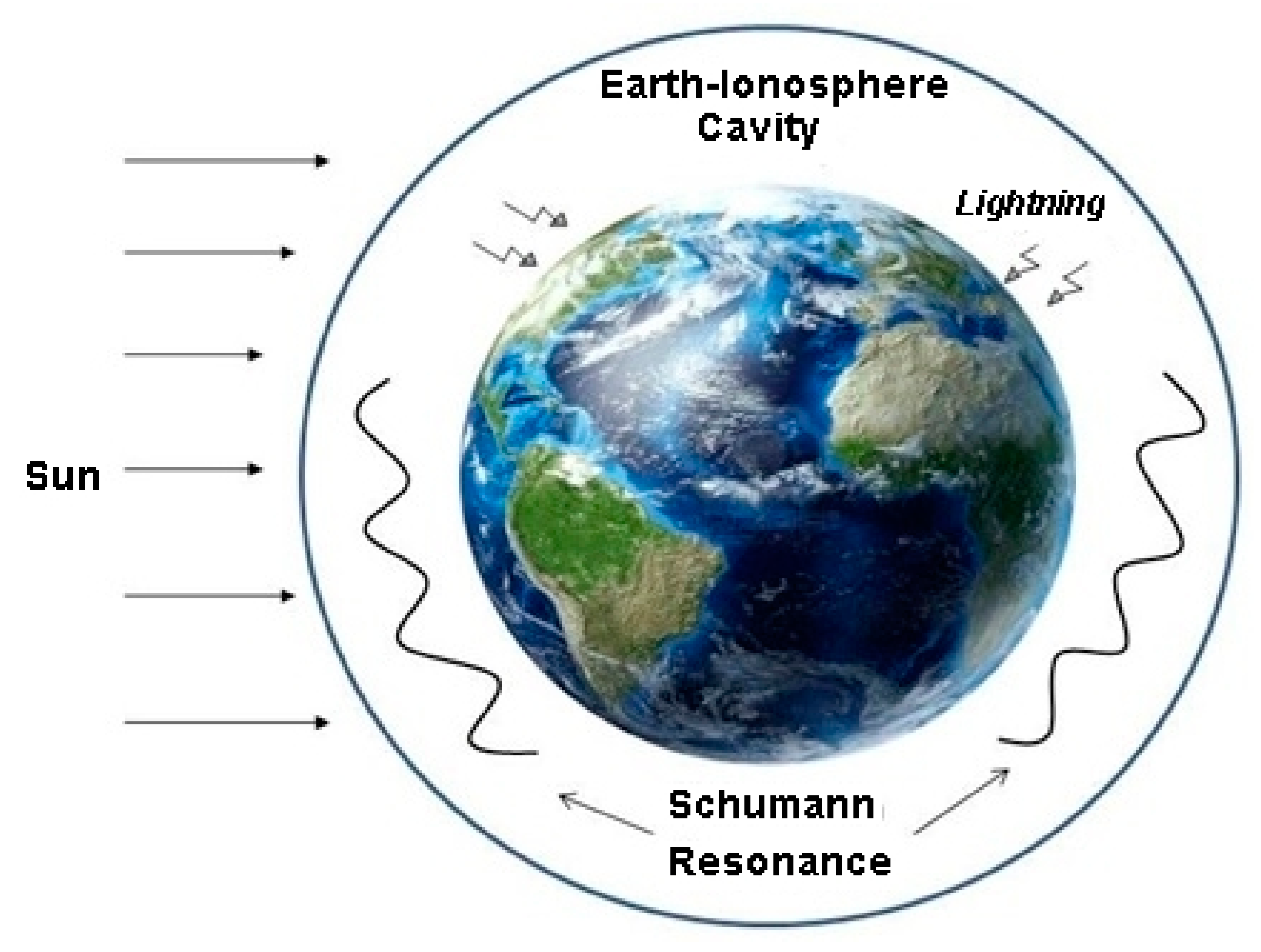
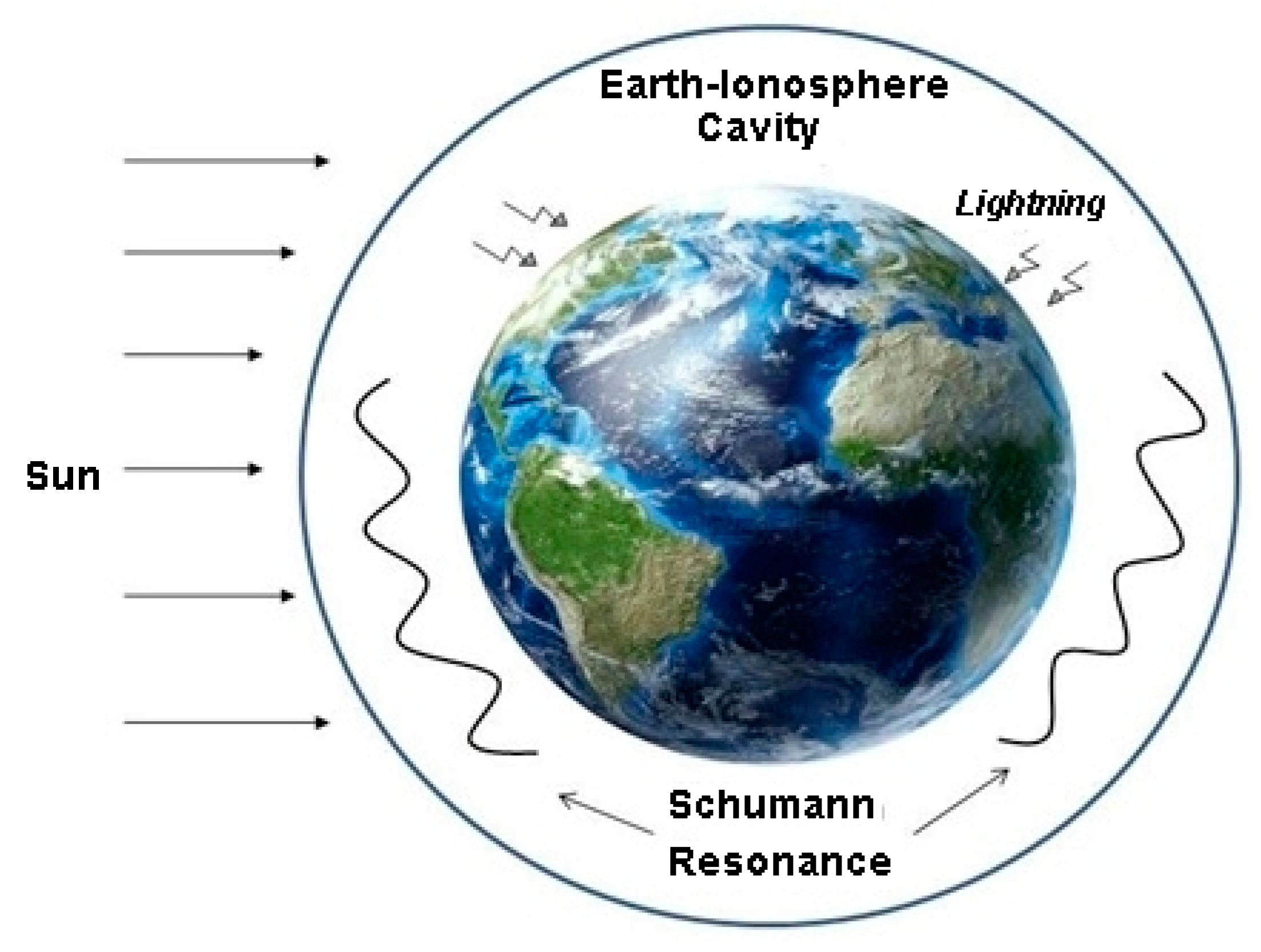
2.1. Seismic Phenomena and ELF Waves
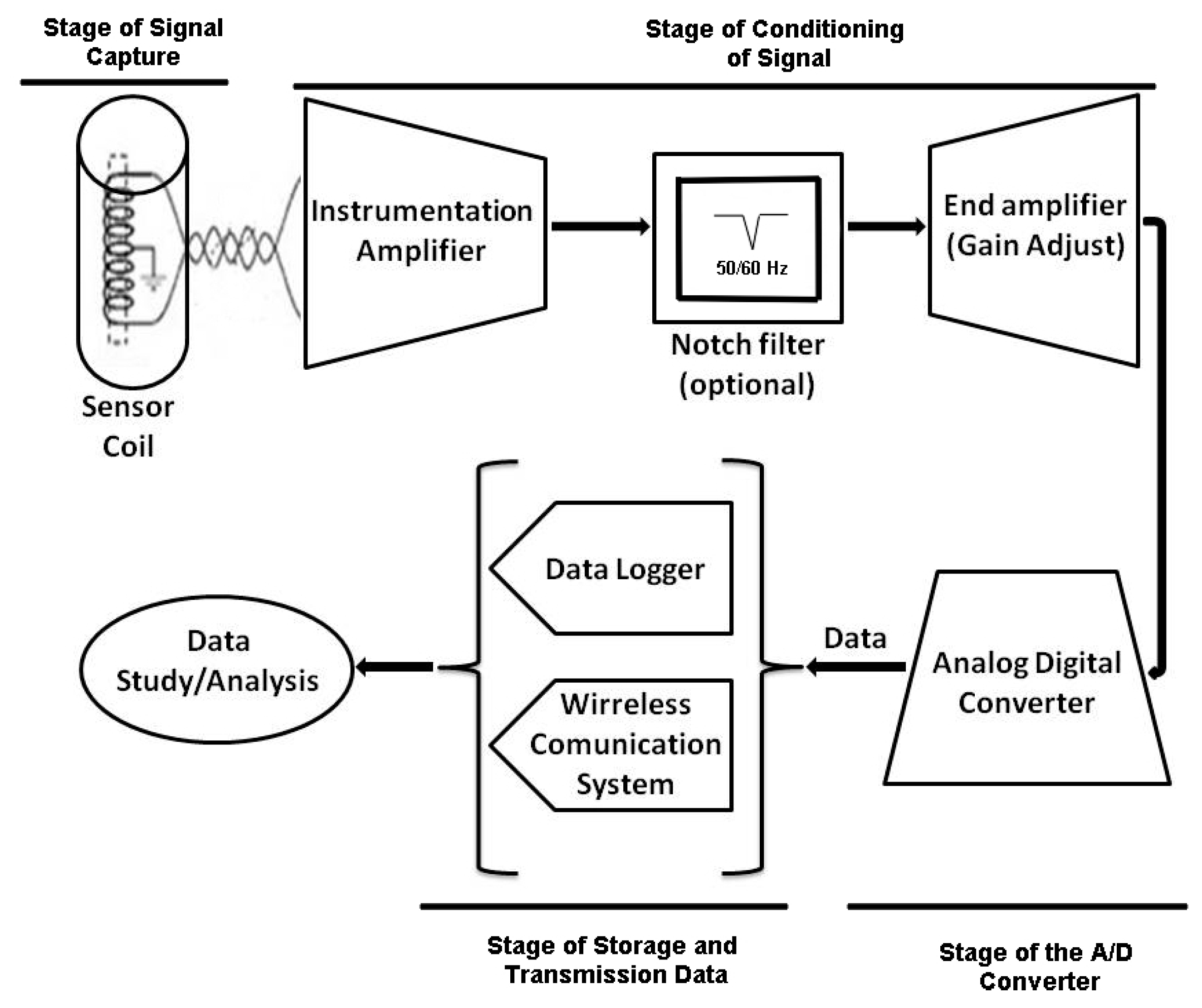
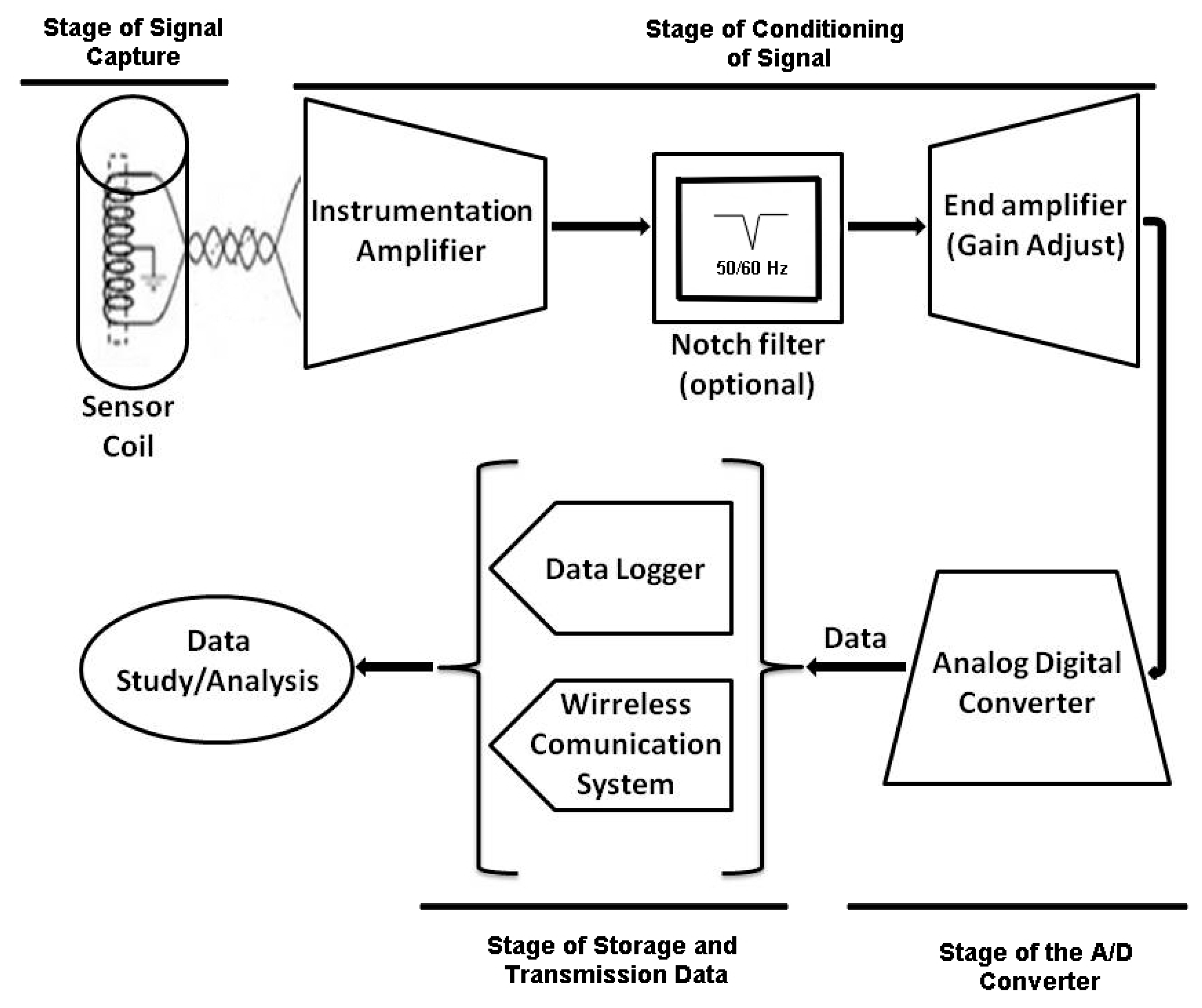
ELF Sensor
- (1)
- Signal Capture: formed by the ELF magnetic sensors.
- (2)
- Stage of conditioning: of signal, constituted by a high gain differential amplifier and a level scaled adapter. Through this process a suitable signal is obtained at the input of the next stage, with a maximum dynamic range input and the lowest output clipping. A passband filter ranging from 3 to 100 Hz is also included in this stage. This filter attenuates signals outside the desired band, preventing undesired intermodulation or cross-modulation phenomena.
- (3)
- The stage of the Analog/Digital converter (A/D converter): This stage has two channels, one for each sensor. It converts the analog signal into 24-bit samples per channel with a sample rate of 196 samples/s.
- (4)
- The last stage is the data transmission and storage. It is constituted by a local information storage (data logger), which serves as failsafe from temporary interruptions in the transmission system. Additionally it allows data transmission from the A/D converter to the installations of the University of Almeria by means of a digital radio link. In such facilities, the data is inserted into an interactive database for post-processing and study.
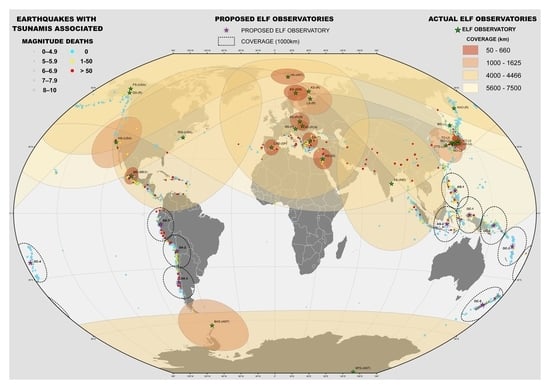
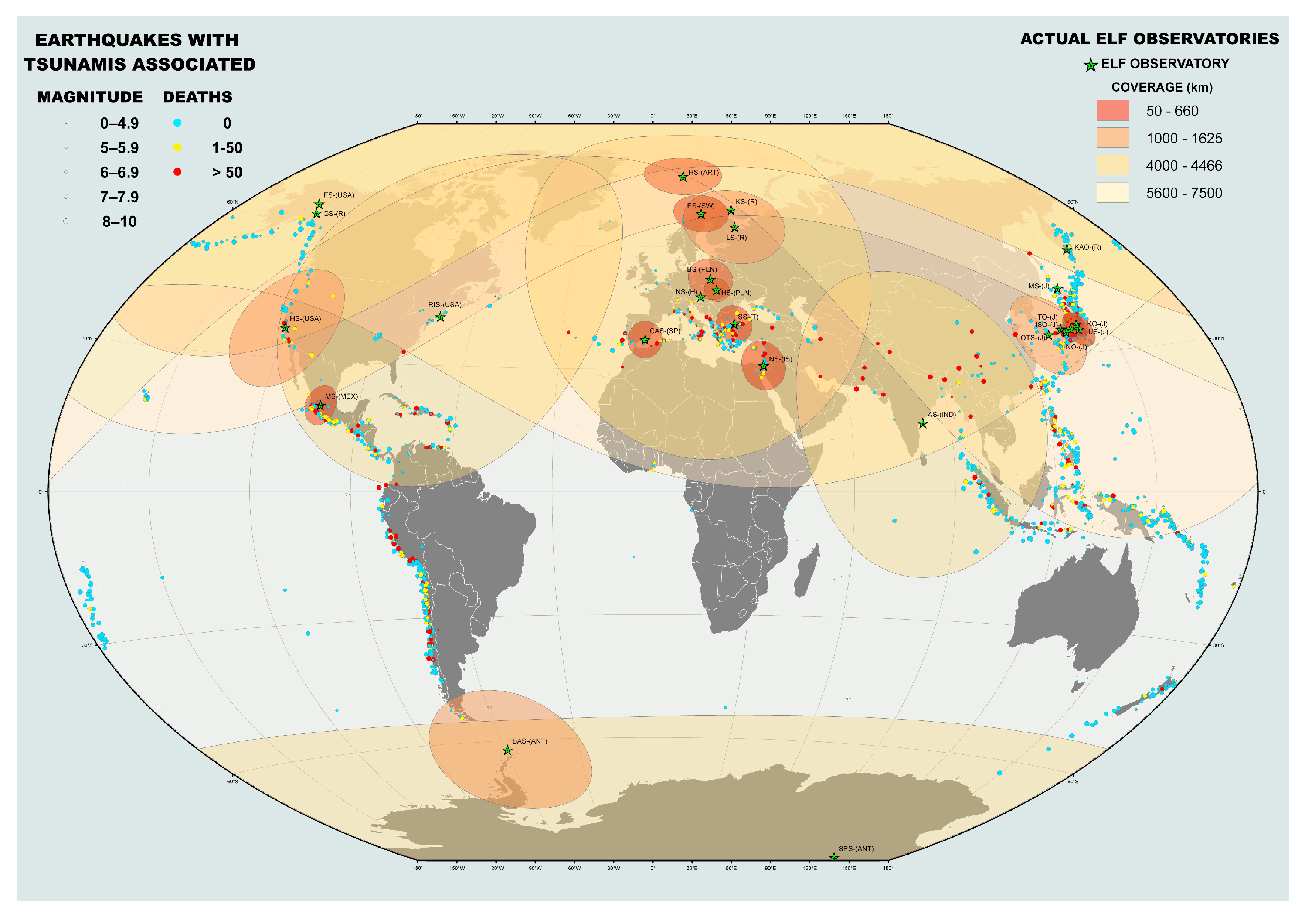
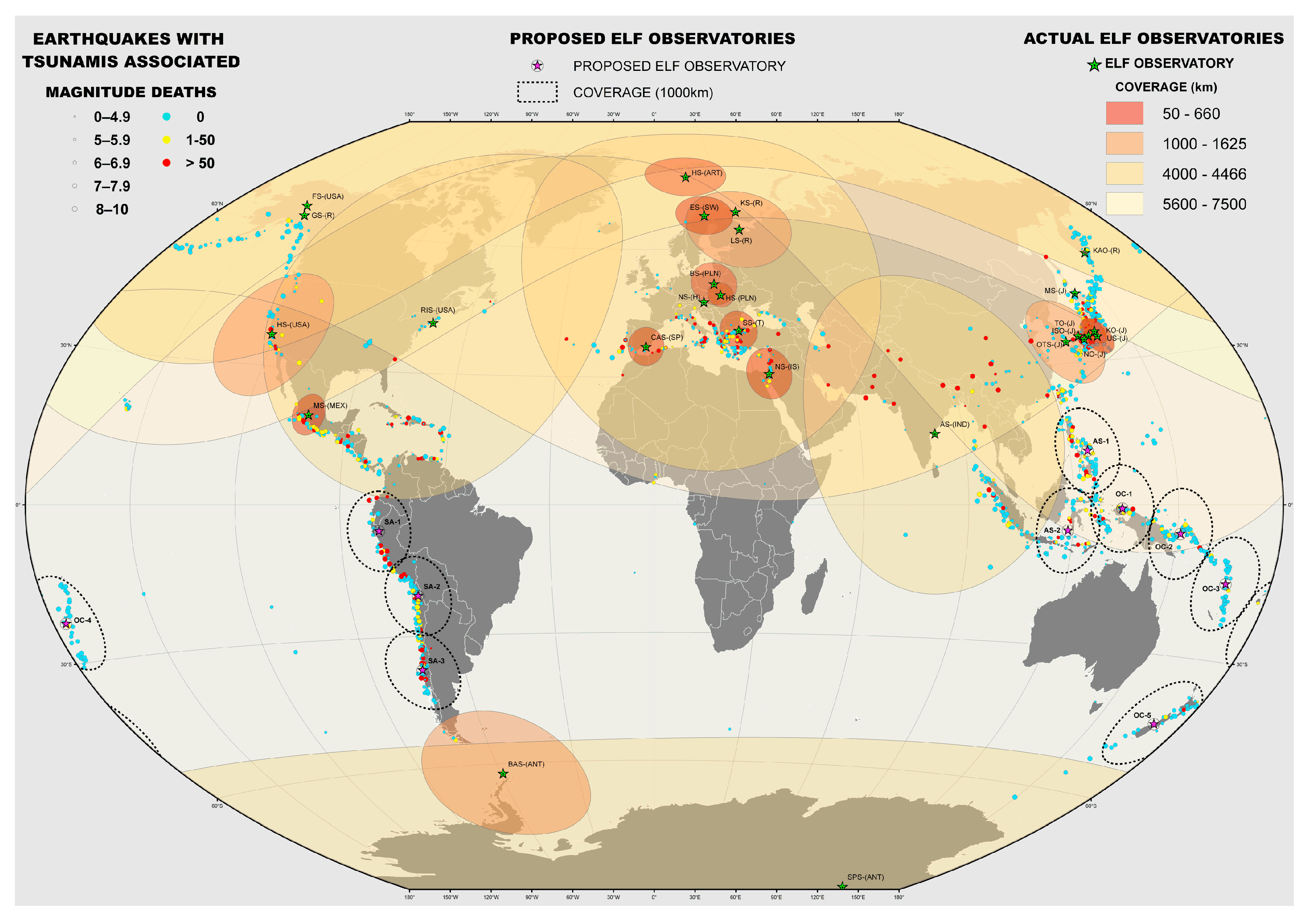
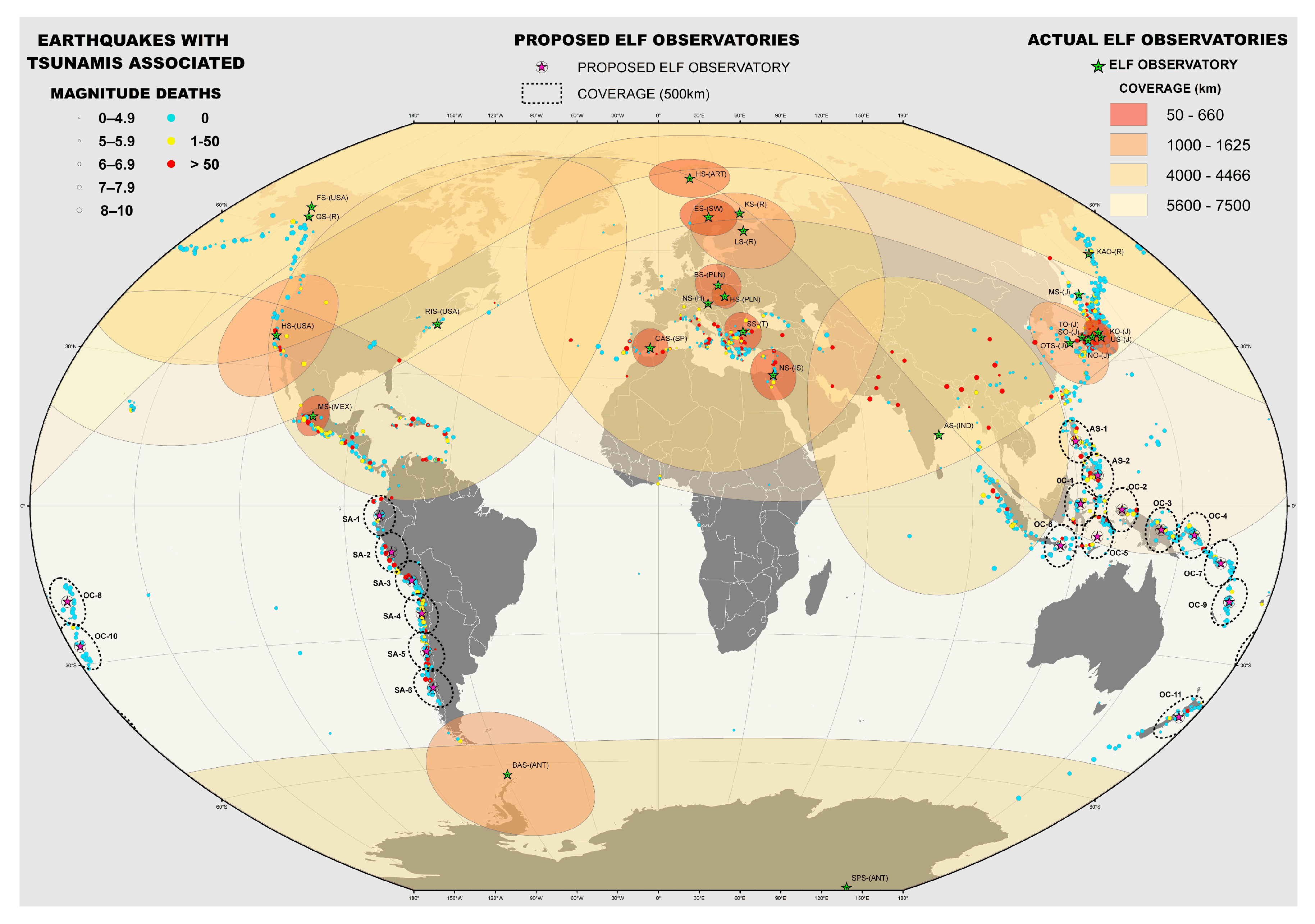
2.2. Worldwide Map of ELF Observatories and Seismic Events
- (a)
- Observatories that measure the disturbances caused by seismic activity on the ELF radiation, considering subELF observatories. These subELF observatories usually record the possible variations in the Earth’s magnetic field, where some have very low frequencies (less than 0.03 Hz). An example of this is the station of Uchimura (Japan), which allows for studying the data collected in the range comprised between 0.01 to 0.033 Hz frequencies [52]. In other publications, the signals of lower frequencies (0.01–0.02 Hz) are analyzed [54] to establish anomalies or unaccounted perturbations of the earth’s magnetic field before the occurrence of several earthquakes of interest [53]. Considering the development of such stations of great interest for possible applications in the field of early detection is considered as an emerging theme in the study.
- (b)
- (c)
- There are also observatories that monitor the exact value of frequencies. Mainly, these values happen to be multiples of the principal frequency depending on the country. These frequencies are usually 223 Hz (in countries having 60 Hz as principal frequency) and 233 Hz (in countries having 50 Hz as principal frequency) [65]. Other observatories use a frequency of 17 Hz [66].
3. Results and Discussion
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Acronyms
| Acronym | Description |
| ELF | Extremely Low Frequency |
| M | Magnitude |
| ULF | Ultra Low Frequency |
| GPS | Global Positioning System |
| SHM | Structural Health Monitoring |
| VLF | Very Low Frequency |
| OLR | Outgoing Long-wave Radiation |
| Bx, By and Bz | Magnetic Field vector Components |
| NS | North-South |
| EW | East-West |
| SR | Schumann Resonance |
| A/D | Analog/Digital |
| DSP | Digital Signal Processor |
| PSD | Power Spectral Density |
| FFT | Fast Fourier Transform |
| NOAA | National Oceanic and Atmospheric Administration |
References
- Gusiakov, V.K. Relationship of tsunami intensity to source earthquake magnitude as retrieved from historical data. Pure Appl. Geophys. 2011, 168, 2033–2041. [Google Scholar] [CrossRef]
- Sarlis, N.V.; Christopoulos, S.R.G.; Skordas, E.S. Minima of the fluctuations of the order parameter of global seismicity. Chaos 2015, 25, 063110. [Google Scholar] [CrossRef] [PubMed]
- Ammon, C.J.; Kanamori, H.; Lay, T.; Velasco, A.A. The 17 July 2006 Java tsunami earthquake. Geophys. Res. Lett. 2006, 33, L24308. [Google Scholar] [CrossRef]
- Geist, E.L.; Bilek, S.L.; Arco, D.; Titov, V.V. Differences in tsunami generation between the 26 December 2004 and 28 March 2005 Sumatra earthquakes. Earth Planets Space 2005, 58, 185–193. [Google Scholar] [CrossRef]
- Varotsos, P. A review and analysis of electromagnetic precursory phenomena. Acta Geophys. Polonica 2001, 49, 1–42. [Google Scholar]
- Fraser-Smith, A.C.; Bernardi, A.; McGill, P.R.; Ladd, M.E.; Helliwell, R.A.; Villard, O.G. Low-frequency magnetic field measurements near the epicenter of the Ms 7.1 Loma Prieta Earthquake. Geophys. Res. Lett. 1990, 17, 1465–1468. [Google Scholar] [CrossRef]
- Bernardi, A.; Fraser-Smith, A.C.; McGill, P.R.; Villard, O.G. ULF magnetic field measurements near the epicenter of the Ms 7.1 Loma Prieta earthquake. Phys. Earth Planet. Inter. 1991, 68, 45–63. [Google Scholar] [CrossRef]
- Utada, H.; Shimizu, H.; Ogawa, T.; Maeda, T.; Furumura, T.; Yamamoto, T.; Yamazaki, N.; Yoshitake, Y.; Nagamachi, S. Geomagnetic field changes in response to the 2011 off the Pacific Coast of Tohoku Earthquake and Tsunami. Earth Planet. Sci. Lett. 2011, 311, 11–27. [Google Scholar] [CrossRef]
- Guangjing, X.; Peng, H.; Qinghua, H.; Katsumi, H.; Febty, F.; Hiroki, Y. Anomalous behaviors of geomagnetic diurnal variations prior to the 2011 off the Pacific coast of Tohoku earthquake (Mw9.0). J. Asian Earth Sci. 2013, 77, 59–65. [Google Scholar] [CrossRef]
- Peng, H.; Katsumi, H.; Guangjing, X.; Ryo, A.; Chieh-Hung, C.; Febty, F.; Hiroki, Y. Further investigations of geomagnetic diurnal variations associated with the 2011 off the Pacific coast of Tohoku earthquake (Mw 9.0). J. Asian Earth Sci. 2015, 114, 321–326. [Google Scholar] [CrossRef]
- De Santis, A.; Balasis, G.; Pavón-Carrasco, F.J.; Cianchini, G.; Mandea, M. Potential earthquake precursory pattern from space: The 2015 Nepal event as seen by magnetic Swarm satellites. Earth Planet. Sci. Lett. 2017, 461, 119–126. [Google Scholar] [CrossRef]
- Harada, K.; Ishida, Y. Introduction to the Special Issue on “State-of-the-Art Sensor Technology in Japan 2012”. Sensors 2014, 14, 11045–11048. [Google Scholar] [CrossRef] [PubMed]
- Abidin, H.Z.; Santo, D.; Haroen, T.S.; Heryani, E. Post-Tsunami land administration reconstruction in Aceh: Aspects, status and problems. Surv. Rev. 2011, 43, 439–450. [Google Scholar] [CrossRef]
- Abidin, H.Z.; Haroen, T.S.; Adiyanto, F.H.; Andreas, H.; Gumilar, I.; Mudita, I.; Soemarto, I. On the establishment and implementation of GPS CORS for cadastral surveying and mapping in Indonesia. Surv. Rev. 2015, 47, 61–70. [Google Scholar] [CrossRef]
- Garrido-Villén, N.; Berné-Valero, J.L.; Antón-Merino, A.; Huang, C.Q. Displacement of GNSS permanent stations depending on the distance to the epicenter due to Japan’s earthquake on 11 March 2011. Surv. Rev. 2013, 45, 159–165. [Google Scholar] [CrossRef]
- Xu, C.J.; Fan, Q.B.; Wang, Q.; Yang, S.M.; Jiang, G.Y. Postseismic deformation after 2008 Wenchuan Earthquake. Surv. Rev. 2014, 46, 432–436. [Google Scholar] [CrossRef]
- Satirapod, C.; Simons, W.; Promthong, C.; Yousamran, S.; Trisirisatayawong, I. Deformation of Thailand as detected by GPS measurements due to the December 26th, 2004 mega-thrust earthquake. Surv. Rev. 2007, 39, 109–115. [Google Scholar] [CrossRef]
- Panumastrakul, E.; Simons, W.J.F.; Satirapod, C. Modelling post-seismic displacements in Thai geodetic network due to the Sumatra-Andaman and Nias earthquakes using GPS observations. Surv. Rev. 2012, 44, 72–77. [Google Scholar] [CrossRef]
- Tobin, H.J.; Kinoshita, M. Investigations of seismogenesis at the Nankai Trough, Japan. In Proceedings of the Integrated Ocean Drilling Program (IODP), Washington, DC, USA, 21 September–15 November 2007; Volume 314–316. [Google Scholar]
- Plafker, G. Alaskan earthquake of 1964 and Chilean earthquake of 1960: Implications for arc tectonics. J. Geophys. Res. 1972, 77, 901–924. [Google Scholar] [CrossRef]
- Kopp, H.; Kukowski, N. Backstop geometry and accretionary mechanics of the Sunda margin. Tectonics 2003, 22, 1072. [Google Scholar] [CrossRef]
- Collot, J.Y.; Marcaillou, B.; Sage, F.; Michaud, F.; Agudelo, W.; Charvis, P.; Graindorge, D.; Gutscher, M.A.; Spence, G. Are rupture zone limits of great subduction earthquakes controlled by upper plate structures? Evidence from multichannel seismic reflection data acquired across the northern Ecuador—Southwest Colombia margin. J. Geophy. Res. 2004, 109, 1–14. [Google Scholar] [CrossRef]
- Moore, G.F.; Bangs, N.L.; Taira, A.; Kuramoto, S.; Pangborn, E.; Tobin, H.J. Three-dimensional splay fault geometry and implications for tsunami generation. Science 2007, 318, 1128–1131. [Google Scholar] [CrossRef] [PubMed]
- Hanson, J.A.; Bowman, J.R. Dispersive and reflected tsunami signals from the 2004 Indian Ocean tsunami observed on hydrophones and seismic stations. Geophys. Res. Lett. 2005, 32, L17608. [Google Scholar] [CrossRef]
- Cochran, E.; Christensen, C.; Chung, A. A novel strong-motion seismic network for community participation in earthquake monitoring. IEEE Instrum. Meas. Mag. 2009, 12, 8–15. [Google Scholar] [CrossRef]
- Grilli, S.T.; Taylor, O.D.S.; Baxter, C.D.; Maretzki, S. Aprobabilistic approach for determining submarine landslide tsunami hazard along the upper east coast of the United States. Mar. Geol. 2009, 264, 74–97. [Google Scholar] [CrossRef]
- Burroughs, S.M.; Tebbens, S.F. Power law scaling and probabilistic forecasting of tsunami runup heights. Pure Appl. Geophys. 2005, 162, 331–342. [Google Scholar] [CrossRef]
- Nakashima, Y.; Heki, K.; Takeo, A.; Cahyadi, M.N.; Aditiya, A.; Yoshizawa, K. Atmospheric resonant oscillations by the 2014 eruption of the Kelud volcano, Indonesia, observed with the ionospheric total electron contents and seismic signals. Earth Planet. Sci. Lett. 2016, 434, 112–116. [Google Scholar] [CrossRef]
- Zhao, D.; Liu, Y.; Li, H. Self-Tuning Fuzzy Control for Seismic Protection of Smart Base-Isolated Buildings Subjected to Pulse-Type Near-Fault Earthquakes. Appl. Sci. 2017, 7, 185. [Google Scholar] [CrossRef]
- Liu, Y.; Xu, C.; Wen, Y.; Li, Z. Post-Seismic Deformation from the 2009 Mw 6.3 Dachaidan Earthquake in the Northern Qaidam Basin Detected by Small Baseline Subset InSAR Technique. Sensors 2016, 16, 206. [Google Scholar] [CrossRef] [PubMed]
- Lu, Z.; Wang, Z.; Li, J.; Huang, B. Studies on seismic performance of precast concrete columns with grouted splice sleeve. Appl. Sci. 2017, 7, 571. [Google Scholar] [CrossRef]
- Xiangzeng, K.; Yaxin, B.; Glass, D.H. Detecting Seismic Anomalies in Outgoing Long-Wave Radiation Data. IEEE J.-STARS 2015, 8, 649–660. [Google Scholar]
- Maurya, A.K.; Singh, R.; Kumar, S.; Veenadhari, B. VLF perturbations associated earthquake precursors using subionospheric VLF signals. In Proceedings of the 2014 XXXIth URSI General Assembly and Scientific Symposium (URSI GASS), Beijing, China, 16–23 August 2014. [Google Scholar]
- Hayakawa, M.; Molchanov, O.A. Summary report of NASDA’s earthquake remote sensing frontier project. Phys. Chem. Earth 2004, 29, 617–625. [Google Scholar] [CrossRef]
- Varotsos, P.A.; Sarlis, N.V.; Skordas, E.S.; Uyeda, S.; Kamogawa, M. Natural-time analysis of critical phenomena: The case of seismicity. EPL Europhys. Lett. 2010, 92, 29002. [Google Scholar] [CrossRef]
- Skordas, E.S.; Sarlis, N.V. On the anomalous changes of seismicity and geomagnetic field prior to the 2011 Mw 9.0 Tohoku earthquake. J. Asian Earth Sci. 2014, 80, 161–164. [Google Scholar] [CrossRef]
- Chmyrev, V.; Smith, A.; Kataria, D.; Nesterov, B.; Owen, C.; Sammonds, P.; Sorokin, V.; Vallianatos, F. Detection and monitoring of earthquake precursors: TwinSat, a Russia-UK satellite project. Adv. Space Res. 2013, 52, 1135–1145. [Google Scholar] [CrossRef]
- Tsutsui, M. Behaviors of Electromagnetic Waves Directly Excited by Earthquakes. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1961–1965. [Google Scholar] [CrossRef]
- Fraser-Smith, A.C.; Helliwell, R.A. The Stanford University ELF/VLF Radiometer Project: Measurement of the Global Distribution of ELF/VLF Electromagnetic Noise. In Proceedings of the 1985 IEEE International Symposium on Electromagnetic Compatibility, Wakefield, MA, USA, 20–22 August 1985. [Google Scholar] [CrossRef]
- Harrison, R.G.; Aplin, K.L.; Rycroft, M.J. Atmospheric electricity coupling between earthquake regions and the ionosphere. J. Atmos. Sol. –Terr. Phys. 2010, 72, 376–381. [Google Scholar] [CrossRef]
- Ondoh, T. Investigation of precursory phenomena in the ionosphere, atmosphere and groundwater before large earthquakes of M > 6.5. Adv. Space Res. 2009, 43, 214–223. [Google Scholar] [CrossRef]
- Schumann, W.O. Über die strahlungslosen Eigenschwingungen einer leitenden Kugel, die von einer Luftschicht und einer Ionosphärenhülle umgeben ist. Z. Naturforsch. A 1952, 7, 149–154. [Google Scholar] [CrossRef]
- Balser, M.; Wagner, C.A. On frequency variations for the Earth-Ionosphere cavity modes. J. Geophys. Res. 1962, 67, 4081–4083. [Google Scholar] [CrossRef]
- Nickolaenko, A.P.; Hayakawa, M.; Hobara, Y. Schumann Resonances and global lightning activity. In Proceedings of the International Conference on Mathematical Methods in Electromagnetic Theory, Kharkov, Ukraine, 2–5 June 1998; pp. 296–297. [Google Scholar]
- Shvets, A.V. Solution of lightning intensity distance distribution reconstruction problem by using the Schumann Resonance signal. In Proceedings of the International Conference on Mathematical Methods in Electromagnetic Theory, Kharkov, Ukraine, 12–15 September 2000; pp. 589–591. [Google Scholar]
- Simôes, F.; Rycroft, M.; Renno, N.; Yair, Y.; Aplin, K.L.; Takahashi, Y. Schumann Resonances as a means of investigating the electromagnetic environment in the solar system. Space Sci. Rev. 2008, 137, 455–471. [Google Scholar] [CrossRef]
- William, E.R. Schumann Resonance: A global tropical thermometer. Science 1992, 256, 1184. [Google Scholar] [CrossRef] [PubMed]
- Ohta, K.; Watanabe, N.; Hayakawa, M. Survey of anomalous Schumann resonance phenomena observed in Japan, in possible association with earthquakes in Taiwan. Phys. Chem. Earth 2006, 31, 397–402. [Google Scholar] [CrossRef]
- Hayakawa, M.; Ohta, K.; Nickolaenko, A.P.; Ando, Y. Anomalous effect in Schumann resonance phenomena observed in Japan, possibly associated with the Chi-chi earthquake in Taiwan. Ann. Geophys. 2005, 23, 1335–1346. [Google Scholar] [CrossRef]
- Uyeda, S.; Nagao, T.; Hattori, K.; Hayakawa, M.; Miyaki, K.; Molchanov, O.; Gladychev, V.; Baransky, L.; Chtchekotov, A.; Fedorov, E.; et al. Geophysical Observatory in Kamchatka region for monitoring of phenomena connected with seismic activity. Nat. Hazards Earth Syst. Sci. 2001, 1, 3–7. [Google Scholar] [CrossRef]
- Kopytenko, Y.A.; Ismaguilow, V.S.; Hattori, K.; Hayakawa, M. Anomaly disturbances of the magnetic fields before the strong earthquake in Japan on 11 March 2011. Ann. Geophys. 2012, 55, 101–107. [Google Scholar]
- Li, Q.; Schekotov, A.; Asano, T.; Hayakawa, M. On the Anomalies in ULF Magnetic Field Variations Prior to the 2008 Sichuan Earthquake. Open J. Earthq. Res. 2015, 4, 55–64. [Google Scholar] [CrossRef]
- Schekotov, A.; Izutsu, J.; Hayakawa, M. On precursory ULF/ELF electromagnetic signatures for the Kobe earthquake on 12 April 2013. J. Asian Earth Sci. 2015, 114, 305–311. [Google Scholar] [CrossRef]
- Nickolaenko, A.P. Application of the Hurst exponent in the analysis of natural ELF electromagnetic noise. In Proceedings of the International Conference on Mathematical Methods in Electromagnetic Theory, Kharkov, Ukraine, 12–15 September 2000; pp. 638–640. [Google Scholar]
- Price, C. Lightning Sensors for Observing, Tracking and Nowcasting Severe Weather. Sensors 2008, 8, 157–170. [Google Scholar] [CrossRef] [PubMed]
- Yano, M.; Yamashita, K.; Ida, Y.; Pavlovich, A. Ionospheric Monitoring by ELF Signals Received at Moshiri station in Japan. In Proceedings of the SICE Annual Conference, Tokyo, Japan, 20–22 August 2008; pp. 1678–1682. [Google Scholar]
- Gladychevet, V.; Baransky, L.; Schekotov, A.; Fedorov, E.; Pokhotelov, O.; Andreevsky, S.; Rozhnoi, A.; Khabazin, Y.; Belyaev, G.; Gorbatikov, A.; et al. Study of electromagnetic emissions associated with seismic activity in Kamchatka region. Nat. Hazards Earth Syst. 2001, 1, 127–136. [Google Scholar] [CrossRef]
- Nickolaenko, A.P.; Hayakawa, M.; Sekiguchi, M.; Ando, Y.; Ohta, K. Model modifications in Schumann resonance intensity caused by localized ionosphere disturbance over the earthquake epicenter. Ann. Geophys. 2006, 24, 567–575. [Google Scholar] [CrossRef]
- García, R.M.; Gázquez, J.A.; Castellano, N.N. Characterization of high-value inductors in ELF Band using vector newtwork analyzer. IEEE Trans. Instrum. Meas. 2013, 62, 415–423. [Google Scholar] [CrossRef]
- Gázquez, J.A.; Fernández, M.; Castellano, N.N.; García, R.M. Techniques for Schumann Resonance Measurements: A Comparison of Four Amplifiers with a Noise Floor Estimate. IEEE Trans. Instrum. Meas. 2015, 64, 2759–2768. [Google Scholar]
- Soliman, A.M. New active RC configuration for realizing a medium-selectivity notch filter. Electron. Lett. 1972, 8, 522–524. [Google Scholar] [CrossRef]
- Fernandez, M.; Gázquez, J.A.; García, R.M.; Castellano, N.N. Optimization of the periodogram average for the estimation of the power spectral density (PSD) of weak signals in the ELF band. Measurement 2016, 76, 207–218. [Google Scholar] [CrossRef]
- Ohta, K.; Izutsu, J.; Hayakawa, M. Anomalous excitation of Schumann resonances and additional anomalous resonances before the 2004 Mid-Niigata prefecture earthquake and the 2007 Noto Hantou Earthquake. Phys. Chem. Earth 2009, 34, 441–448. [Google Scholar] [CrossRef]
- Hayakawa, M. Seismo-Ionospheric Perturbations, and the Precursors to the 2011 Japan Earthquake. In Proceedings of the 2014 International Symposium on Electromagnetic Compatibility, Tokyo (EMC’14/Tokyo), Tokyo, Japan, 12–16 May 2014; pp. 155–158. [Google Scholar]
- Yasukawa, H.; Adachi, S.; Hata, M.; Takumi, I. Signal detection and processing of seismic electromagnetic radiation in ELF band. In Proceedings of the 8th IEEE International Conference on Electronics, Circuits and Systems, St. Julian´s, Malta, 2–5 September 2001; pp. 1477–1480. [Google Scholar]
- Fujii, T.; Takumi, I.; Hata, M.; Yasukawa, H. Signal Processing of Earthquake Precursor at ELF Band. In Proceedings of the International Symposium on Communications and Information Technologies, Bangkok, Thailand, 18–20 October 2006; pp. 1–6. [Google Scholar]
- Greenberg, E. Global geolocation of intense lightning strokes associated with TLEs based on ELF measurements from single-station. In Proceedings of the 23rd IEEE Convention of Electrical and Electronics Engineers in Israel, Tel-Aviv, Israel, 6–7 September 2004; pp. 25–28. [Google Scholar]
- Schekotov, A.; Molchanov, O.; Hattori, K.; Fedorov, E.; Gladyshev, V.A.; Belyaev, G.G.; Chebrov, V.; Sinitsin, V.; Gordeev, E.; Hayakawa, M. Seismo-ionospheric depression of the ULF geomagnetic fluctuations at Kamchatka and Japan. Phys. Chem. Earth 2006, 31, 313–318. [Google Scholar] [CrossRef]
- Tanaka, Y.T.; Hayakawa, M.; Hobara, Y.; Nickolaenko, A.P.; Yamashita, K.; Sato, M.; Takahashi, Y.; Terasawa, T.; Takahashi, T. Detection of transient ELF emission caused by the extremely intense cosmic gamma-ray flare of 27 December 2004. Geophys. Res. Lett. 2011, 38, L08805. [Google Scholar] [CrossRef]
- Ferraro, A.J.; Lee, H.S.; Collins, T.W.; Baker, M.; Werner, D.; Zain, F.M.; Li, P.J. Measurements of extremely low frequency signals from modulation the polar electrojet above Fairbanks, Alaska. IEEE Trans. Antennas Propag. 1989, 37, 802–805. [Google Scholar] [CrossRef]
- Nickolaenko, A.P. Diurnal Pattern of ELF Radio Signal Detected at the ‘Bellinshausen’ Antarctic Station. In Proceedings of the Sixth International Kharkov Symposium on Physics and Engineering of Microwaves, Millimeter and Submillimeter Waves and Workshop on Terahertz Technologies, Kharkov, Ukraine, 25–30 June 2007; pp. 760–762. [Google Scholar]
- Yusop, N.; Ya’acob, N.; Shariff, K.K.M. Nighttime D-Region Ionosphere Characteristics from Tweek Atmospherics observed in the North America Region. In Proceedings of the IEEE Asia-Pacific Conference on Applied Electromagnetics (APACE), Melaka, Malaysia, 11–13 December 2012; pp. 104–109. [Google Scholar]
- Nickolaenko, A.P.; Hayakawa, M. Algorithm for choosing the place for the global Schumann resonance observatory. Adv. Pol. Atmos. Res. 1999, 13, 119–131. [Google Scholar]
- Matuszko, D.; Soroka, J. ZachmurzenieSpitsbergenunapodstawieobserwacji w PolskiejStacjiPolarnej w Hornsundzie. Cloudiness over Spitsbergen Based on Observations Made at the Polish Polar Station in Hornsund. 2013. Available online: http://www.geo.uj.edu.pl (accessed on 12 March 2016).
- Tulunaya, Y.; Altuntas, E.; Tulunay, E.; Price, C.; Ciloglu, T.; Bahadırlar, Y.; Şenalp, E.T. A case study on the ELF characterization of the earth-ionosphere cavity: Forecasting the Schumann resonance intensities. J. Atmos. Sol. –Terr. Phys. 2008, 70, 669–674. [Google Scholar] [CrossRef]
- Neska, M.; Sátori, G.; Szendrõi, J.; Marianiuk, J.; Nowożyński, K.; Tomczyk, S. Schumann Resonance Observation in Polish Polar Station at Spitsbergen and Central Geophysical Observatory in Belsk. Publ. Inst. Geophys. Pol. Acad. Sci. 2007, C-99, 1–6. [Google Scholar]
- Yasakawa, H.; Adachi, S.; Takamu, I.; Hata, M. Auditory sonification for ELF band signal of seismic electromagnetic radiation. Geosci. Remote Sens. Symp. 2000, 1, 301–303. [Google Scholar]
- National Geophysical Data Center. World Data Service (NGDC/WDS): Significant Earthquake Database; National Geophysical Data Center, NOAA: Silver Spring, MD, USA, 2015. [CrossRef]
- Sierra, F.P.; Vázquez, H.S.; Andrade, M.E.; Rodriguez-Osorio, D. Development of a Schumann-resonance station in Mexico: Preliminary measurements. IEEE Antennas Propag. Mag. 2014, 56, 112–119. [Google Scholar] [CrossRef]
- Maurya, A.K.; Selvakumaran, R.; Singh, R.; Veenadhari, B. Characteristics of Tweeks Radio Atmospherics Observed in Indian Low Latitude region using AWESOME VLF receiver. In Proceedings of the XXXth URSI General Assembly and Scientific Symposium, Istanbul, Turkey, 13–20 August 2011; pp. 1–4. [Google Scholar]
- Hayakawa, M.; Hobara, Y.; Ohta, K.; Izutsu, J.; Nickolaenko, A.P.; Sorokin, V. Seismogenic effects in the ELF Schumann resonance band. IEEJ Trans. Fundam. Mater. 2011, 131, 684–690. [Google Scholar] [CrossRef]
- Kulak, A.; Kubisz, J.; Klucjasz, S.; Michalec, A.; Mlynarczyk, J.; Nieckarz, Z.; Ostrowski, M.; Zieba, S. Extremely low frequency electromagnetic field measurements at the Hylaty station and methodology of signal analysis. Radio Sci. 2014, 49, 361–370. [Google Scholar] [CrossRef]
- Fernández-Gómez, M.J.; Asencio-Cortés, G.; Troncoso, A.; Martínez-Álvarez, F. Large Earthquake Magnitude Prediction in Chile with Imbalanced Classifiers and Ensemble Learning. Appl. Sci. 2017, 7, 625. [Google Scholar] [CrossRef]
- Goldberg, D.M.; Gott, J.R. Flexion and skewness in map projections of the earth. Cartographica 2007, 42, 297–318. [Google Scholar] [CrossRef]
- Okal, E.A. The quest for wisdom: Lessons from 17 tsunamis, 2004–2014. Philos. Trans. 2015, 373. [Google Scholar] [CrossRef] [PubMed]
- Hennig, B.D. Gridded cartograms as a method for visualizing earthquake risk at the global scale. J. Maps 2014, 10, 186–194. [Google Scholar] [CrossRef]
- Burke, C.P.; Jones, D.L. An experimental investigation of ELF attenuation rates in the Earth-ionosphere duct. J. Atmos. Sol. –Terr. Phys. 1992, 3–4, 243–250. [Google Scholar] [CrossRef]
- Hayakawa, M. (Ed.) Atmospheric and Ionospheric Electromagnetic Phenomena Associated with Earthquakes; TERRAPUB: Tokyo, Japan, 1999; pp. 417–427. [Google Scholar]
- Ondoh, T. Anomalous sporadic-E ionization before a great earthquake. Adv. Space Res. 2004, 34, 1830–1835. [Google Scholar] [CrossRef]
- Hata, M.; Fujii, T.; Takumi, I. EM precursor of large-scale earthquakes in Japan. In Proceedings of the International Workshop on Seismo Electromagnetics (IWSE 2005); University Electro-Communications: Tokyo, Japan; 2005, pp. 182–186.
- Hayakawa, M.; Molchanov, O.A. Seismo Electromagnetics: Lithosphere–Atmosphere–Ionosphere Couplings; TERRAPUB: Tokyo, Japan, 2002; pp. 385–390. [Google Scholar]
- Geological and Mining Institute of Spain. A 6.3 Earthquake in the Alborán Sea Sha kes Andalusia and Melilla. 2016. Available online: http://info.igme.es/eventos/TerremotoAlboran (accessed on 16 October 2017).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID (Reference) | Name | Country | Lat (°N) | Long (°E) | Range (km) | Year |
|---|---|---|---|---|---|---|
| HAS-(ARC) [68] | Hournsund | Arctic Pole | 77.8 | 20.7 | 500 | 2000 |
| KS(R) [69] | Kola | Russia | 68.8 | 34.5 | 7500 | 1999 |
| ES-(SW) [70] | Esrange | Sweden | 67.9 | 21.0 | 500 | 2000 |
| FS-(USA) [71] | Fairbanks | USA | 64.8 | −147.7 | 4000 | 1987 |
| LS-(R) [72] | Letha | Russia | 64.4 | 33.9 | 1000 | 2007 |
| GS-(R) [73] | Gakona | Russia | 62.7 | −143.9 | 5600 | 2012 |
| BS-(PO) [74] | Belsk | Poland | 51.8 | 20.7 | 550 | 1999 |
| NS-(H) [75] | Nagycenk | Hungry | 47.6 | 16.7 | 4400 | 2006 |
| MS-(J) [57] | Moshiri | Japan | 44.4 | 142.2 | 6000 | 1998 |
| HYS-(PO [76] | Hylaty | Poland | 42.2 | 22.5 | 320 | 1994 |
| RIS(USA) [75] | R. Island | USA | 41.7 | −71.6 | 4466 | 2007 |
| SS-(T) [77] | Sorköy | Turkey | 40.8 | 27.1 | 500 | 2007 |
| CAS-(SP) [60] | Calar Alto | Spain | 37.1 | −2.6 | 500 | 2012 |
| HS-(USA) [75] | Hollister | USA | 36.8 | −121.5 | 1500 | 1995 |
| KO-(J) [78] | Kakioka | Japan | 36.2 | 140.2 | 300 | 2006 |
| TO-(J) [75] | Tottori | Japan | 35.5 | 134.2 | 100 | 1973 |
| NO-(J) [48] | Nakatsugawa | Japan | 35.4 | 137.5 | 100 | 2000 |
| US-(J) [78] | Uchiura | Japan | 35.1 | 140.2 | 420 | 2012 |
| ISO-(J) [79] | Ibaraki | Japan | 34.8 | 135.6 | 200 | 1999 |
| OTS-(J) [49] | O. Tsushima | Japan | 34.6 | 129.4 | 1000 | 1998 |
| KAO-(R) [50] | Kamchatka | Russia | 32.9 | 158.2 | 50 | 2001 |
| NS-(IS) [75] | Negev | Israel | 30.6 | 35.0 | 660 | 1998 |
| MS-(MX) [80] | Mexico | Mexico | 19.8 | −101.7 | 500 | 2014 |
| AS-(IND) [81] | Allahabad | India | 16.1 | 81.7 | 4000 | 2007 |
| BAS-(ANT) [82] | Bellinshausen | Antarctic Pole | −62.2 | −59.0 | 1625 | 2007 |
| SPS-(ANT) [75] | South Pole | Antarctic Pole | −89.0 | 134.0 | 4000 | 1997 |
| ID | Geographical Area | Lat (°N) | Lon (°E) |
|---|---|---|---|
| AS-1 | Asia—Basey (Western Samar)—Philippines | 11.416 | 125.175 |
| OC-1 | Indonesia | −0.773 | 133.959 |
| AS-2 | Asia—Dewakang (Liukang) Indonesia | −5.490 | 118.630 |
| OC-2 | Oceania—Papua New Guinea | −5.809 | 151.002 |
| SA-1 | South America—Peru | −5.979 | −78.942 |
| OC-3 | Oceania—Malo Island (Vanuatu) | −15.25 | 166.83 |
| SA-2 | South America—Chile | −20.811 | −69.536 |
| OC-4 | Oceania—Tongatapu | −22.342 | −176.206 |
| SA-3 | South America—Chile | −37.724 | −73.260 |
| OC-5 | Oceania—New Zealand | −43.446 | 170.468 |
| ID | Geographical Area | Lat (°N) | Lon (°E) |
|---|---|---|---|
| AS-1 | Philippines | 13.723 | 121.153 |
| AS-2 | Asia—Basey (Western Samar)—Philippines | 6.413 | 126.161 |
| OC-1 | Indonesia | 0.389 | 120.841 |
| OC-2 | Indonesia | −0.808 | 132.751 |
| OC-3 | Oceania—Papua New Guinea | −4.8817 | 144.243 |
| OC-4 | Oceania—Papua New Guinea | −5.8344 | 153.886 |
| OC-5 | Indonesia | −6.493 | 126.073 |
| OC-6 | Indonesia | −8.569 | 115.741 |
| SA-2 | South America—Peru | −10.500 | −77.000 |
| OC-7 | Oceania—Salomon Islands | −11.127 | 162.771 |
| SA-3 | South America—Peru | −17.000 | −72.000 |
| OC-8 | Oceania—Niue | −18.027 | −170.00 |
| OC-9 | Oceania—Malo Island (Vanuatu) | −18.421 | 168.411 |
| SA-1 | South America—Ecuador | −22.185 | −79.902 |
| SA-4 | South America—Chile | −24.537 | −70.707 |
| SA-5 | South America—Chile | −33.235 | −71.726 |
| OC-10 | Oceania—Tonga | −26.547 | −180.00 |
| OC-11 | Oceania—New Zealand | −41.25 | 175.00 |
| SA-6 | South America—Chile | −41.497 | −72.986 |
| Precursor Phenomenon | Earthquake (Year) | Reference |
|---|---|---|
| Increase of Very Low Frequency/Extremely Low Frequency (VLF/ELF) electromagnetic noise before and after an earthquake. | Hyogo-Ken Nanbu earthquake (1995) | [88] |
| Anomalous increases up to 10 Hz in Ultra Low Frequency (ULF) signals were detected at Shigaraki, 90 km of the epicentre and at Kokubunji, 500 km east of the epicentre. | Hyogoken-Nanbu earthquake (1995) | [89] |
| Strong ELF noise from lightning strikes 2 days before a major earthquake. | Hyogoken–Nanbu earthquake (1995) | [90] |
| The anomalous and sporadic ionization of Earth’s electric field before major earthquakes. | Hyogoken–Nanbu earthquake (1995) | [91] |
| Observation of ULF anomalies prior to the development of an earthquake. | Loma Prieta earthquake (1989) | [6,7] |
| A geomagnetic field variation of 7.2 nT was detected approximately 7 min before an earthquake. | Tohoku earthquake (2011) | [8,9,10] |
| Detection of a series of pre-earthquakes magnetic anomalies. | Nepal earthquake (2015) | [11] |
| Abnormal variations in the amplitude and phase of these ELF signals when crossing regions of certain seismic activity. | earthquakes in Taiwan (1999–2004) | [48] |
| An atypical amplitude increase of all its modes, highlighting the variation in the fourth mode of resonance. | Chi-chi earthquake (1999) | [49] |
| The existence of depressions in the frequency of the fourth mode resonance occurring between 2 and 6 days before one of earthquakes. | The Kamchatka region (during the last 30 years) | [50] |
| ELF Signals anomalies before an earthquake. | Sichuan earthquake (2008) | [52] |
| ELF Signals anomalies before an earthquake. | Kobe earthquake (2013) | [53] |
| Interference Signals in the ELF band. | Japan Earthquake (2011) | [64] |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gazquez, J.A.; Garcia, R.M.; Castellano, N.N.; Fernandez-Ros, M.; Perea-Moreno, A.-J.; Manzano-Agugliaro, F. Applied Engineering Using Schumann Resonance for Earthquakes Monitoring. Appl. Sci. 2017, 7, 1113. https://doi.org/10.3390/app7111113
Gazquez JA, Garcia RM, Castellano NN, Fernandez-Ros M, Perea-Moreno A-J, Manzano-Agugliaro F. Applied Engineering Using Schumann Resonance for Earthquakes Monitoring. Applied Sciences. 2017; 7(11):1113. https://doi.org/10.3390/app7111113
Chicago/Turabian StyleGazquez, Jose A., Rosa M. Garcia, Nuria N. Castellano, Manuel Fernandez-Ros, Alberto-Jesus Perea-Moreno, and Francisco Manzano-Agugliaro. 2017. "Applied Engineering Using Schumann Resonance for Earthquakes Monitoring" Applied Sciences 7, no. 11: 1113. https://doi.org/10.3390/app7111113
APA StyleGazquez, J. A., Garcia, R. M., Castellano, N. N., Fernandez-Ros, M., Perea-Moreno, A.-J., & Manzano-Agugliaro, F. (2017). Applied Engineering Using Schumann Resonance for Earthquakes Monitoring. Applied Sciences, 7(11), 1113. https://doi.org/10.3390/app7111113