1. Introduction
The rapid development of mobile robots offers extensive possibilities for addressing a variety of tasks. However, achieving autonomous navigation for mobile robots remains a challenging endeavor. One critical factor in ensuring the safe and efficient completion of navigation tasks is local path planning [
1,
2]. Current local path planning algorithms primarily focus on enabling mobile robots to reach their destinations quickly and safely, often overlooking the significance of the global path in robotic navigation applications. For instance, robots such as disinfection robots [
3], vacuum cleaning robots [
4], inspection robots [
5], and tour guiding robots [
6] must operate along designated global paths to perform their tasks effectively. Therefore, this paper focuses on how local path planning algorithms can achieve obstacle avoidance and adherence to the global path in navigation tasks where the global path cannot be arbitrarily altered.
To enable mobile robots to navigate around obstacles while closely following the global path, the core idea of the method proposed in this paper is to simulate the stamping forming technique used in metalworking. Stamping forming involves placing a metal sheet between molds and then applying high pressure with a punch press. This process deforms the metal sheet, shaping it along the indentations of the mold. In the context of local path planning for mobile robots, obstacles are analogous to molds, the global path is analogous to the punch, and the local path is analogous to the metal sheet. By simulating the stamping process, the local path can be shaped to contour around obstacles while adhering to the global path. Therefore, the proposed method is termed the path stamping forming (PSF) algorithm.
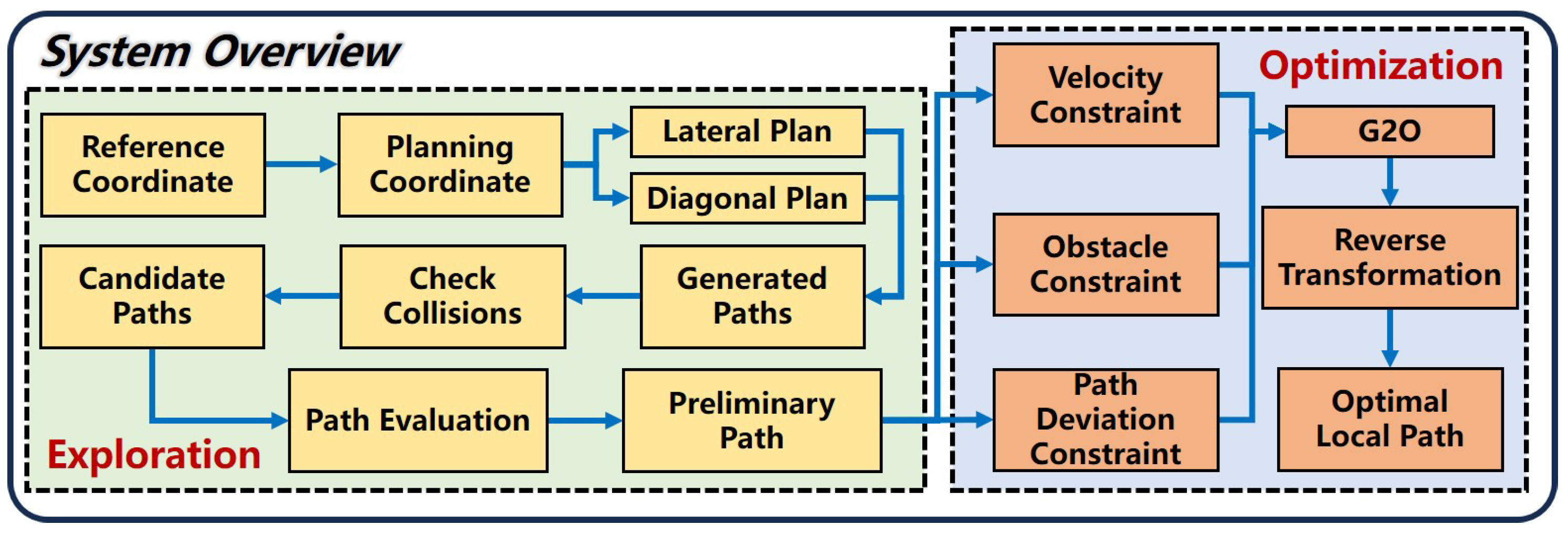
The PSF algorithm is a two-stage local path planning method based on sampling and optimization, as illustrated in
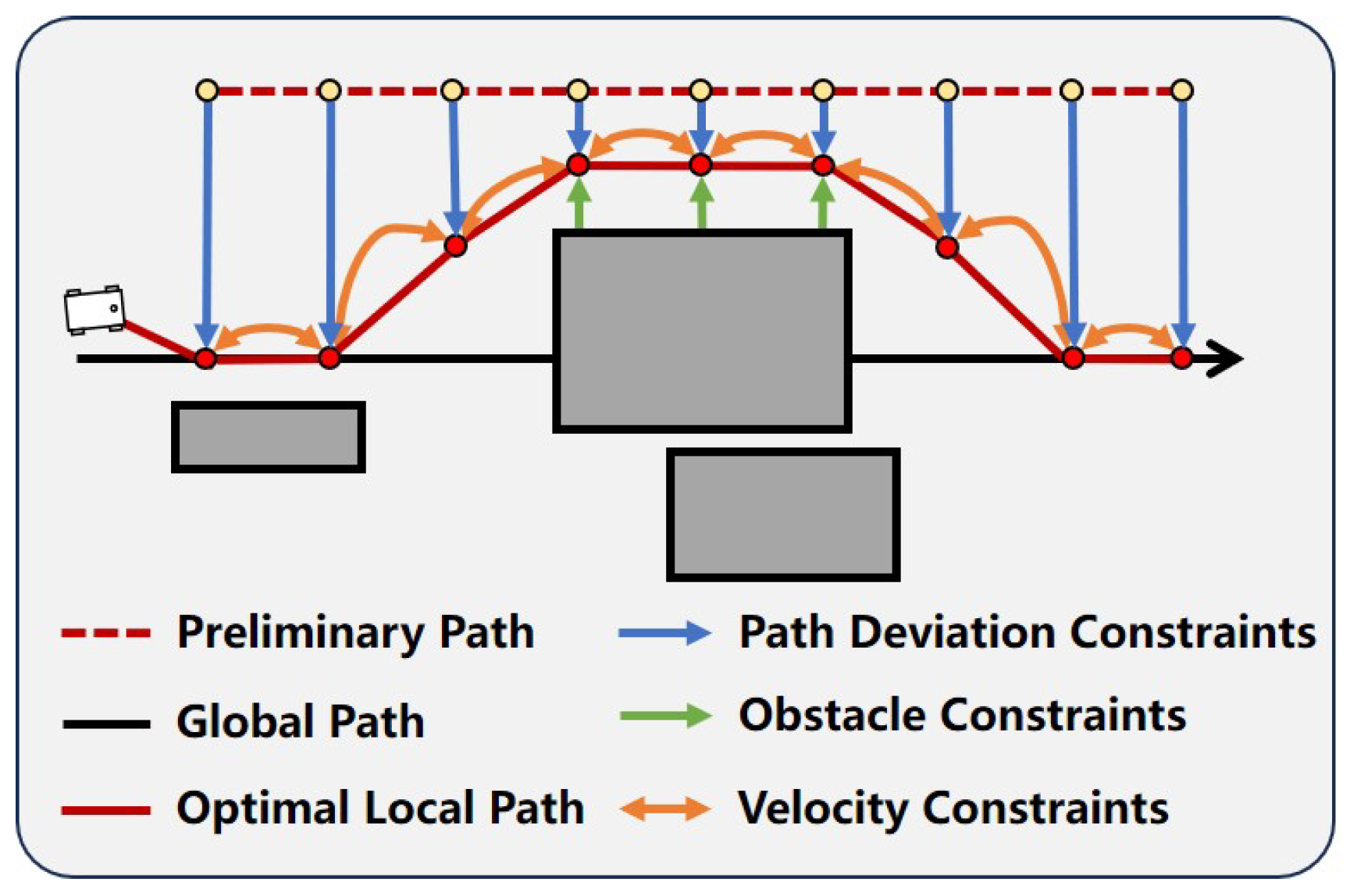
Figure 1. Initially, the PSF algorithm employs a sampling approach to generate a preliminary path that runs parallel to the global path without colliding with obstacles, similar to the initial position of the metal sheet in the stamping process. Subsequently, the PSF algorithm establishes constraints for path deviation, obstacle avoidance, and velocity, similar to the downward pressure exerted by the punch, the resistance from the molds, and the deformation limits of the metal sheet during stamping. Finally, an optimization method is employed to compute the optimal local path that satisfies these constraints.
The contributions of this study are as follows:
1. The PSF algorithm comprehensively considers the significance of the global path in navigation tasks. It ensures that mobile robots can quickly return to the global path after deviating from it and then continue following the global path.
2. During the optimization stage, we only consider obstacles relevant to the global path, rather than all obstacles in the environment. Additionally, we optimize only the longitudinal distance between the mobile robot and the global path, thereby reducing the computational complexity of the optimization process.
3. This paper conducts extensive experiments on the PSF algorithm, comparing its navigation performance with existing advanced navigation algorithms, and demonstrating the superior performance of the PSF algorithm in following the global path. Furthermore, the effectiveness of the PSF algorithm is validated on real robots and in typical tasks.
The rest of this paper is organized as follows.
Section 2 reviews the related work.
Section 3 presents the proposed path stamping forming algorithm. In
Section 4, simulations and experiments illustrate the effectiveness and performance of the proposed algorithm, and finally,
Section 5 concludes this paper.
2. Related Work
Currently, local path planning algorithms for mobile robots primarily include multi-path generation and evaluation methods, as well as single-path direct optimization methods.
2.1. Multi-Path Generation and Evaluation Method
The primary idea behind the multi-path generation and evaluation method is to generate a series of possible candidate paths in the configuration space surrounding the mobile robot. Subsequently, for each candidate path, collision risk with the environment, proximity to the goal, smoothness relative to the current velocity, and other metrics are evaluated based on predefined objective or cost functions. Finally, the optimal path is selected to fulfill the local path planning task.
Dynamic window approach (DWA) is one of the most widely used algorithms in local path planning for mobile robots. While DWA can address path planning problems in complex and dynamic environments, its performance in planning local paths is closely related to the number of candidate paths. Therefore, some scholars have proposed improvement methods. For instance, parameter adaptation through fuzzy logic [
7,
8,
9] and learning methods [
10,
11] has been suggested. Additionally, deep learning methods have been proposed to generate feasible trajectory sequences omnidirectionally as auxiliary candidate trajectories [
12]. Semantic maps were generated by semantic simultaneous localization and mapping algorithms for robot planning under uncertainties [
13]. However, approaches based on deep learning or planning with semantic maps require a lot of computing resources, resulting in problems such as high computational complexity and weak generalization ability. There have also been improvements in sampling methods to make them applicable to systems with uncertainty [
14]. In the field of autonomous driving, the frenet optimal trajectory (FOT) algorithm proposed by Werling et al. [
15] adopts a similar approach. This algorithm samples a series of candidate terminal states and fits smooth curves connecting the current state to these candidate states to plan the vehicle’s trajectory. Subsequently, an evaluation function considering factors such as safety and comfort is used to select the optimal trajectory [
16].
2.2. Single-Path Direct Optimization Method
The single-path direct optimization method typically transforms the local path planning problem into an optimization problem. These algorithms usually consider multiple factors, such as path length, the robot’s kinematic constraints, distance from obstacles, smoothness of speed and acceleration, and travel time. By integrating these factors, the algorithm can generate paths that are safe, comfortable, and efficient.
In traditional solutions, a feasible initial path is first generated by a path planner. This initial path is then refined through optimization algorithms. For example, initial paths generated by planners based on ant colony optimization [
17,
18], rapidly exploring random trees [
19], artificial potential fields [
20], particle swarm optimization (PSO) [
21], and Bézier curves [
22] have been optimized further. However, in dynamic environments, these methods require the initial path to be regenerated, necessitating the design of re-planning strategies to ensure the robot follows the global path. The time-elastic-band (TEB) algorithm proposed by Rösmann et al. [
23,
24] optimizes the entire solution space to ensure the local path is optimal under given constraints. The main idea of the TEB algorithm is to treat the global path as an elastic band that deforms under internal and external forces, adjusting the global path based on the position and shape of obstacles. Different constraint parameters can be set to adapt to the complexity of the scenario. Therefore, the TEB algorithm is also one of the most widely applied methods.
Although the single-path direct optimization method effectively addresses multi-objective optimization problems and can more easily find the optimal path solution compared to multi-path generation and evaluation methods, it also requires substantial computational resources and time to find the optimal solution. If inappropriate optimization algorithm parameters and cost function weights are selected, the algorithm’s performance and results may be adversely affected. This can lead to issues such as failure to converge or becoming trapped in local optima.
4. Simulations and Experiments
4.1. Simulations
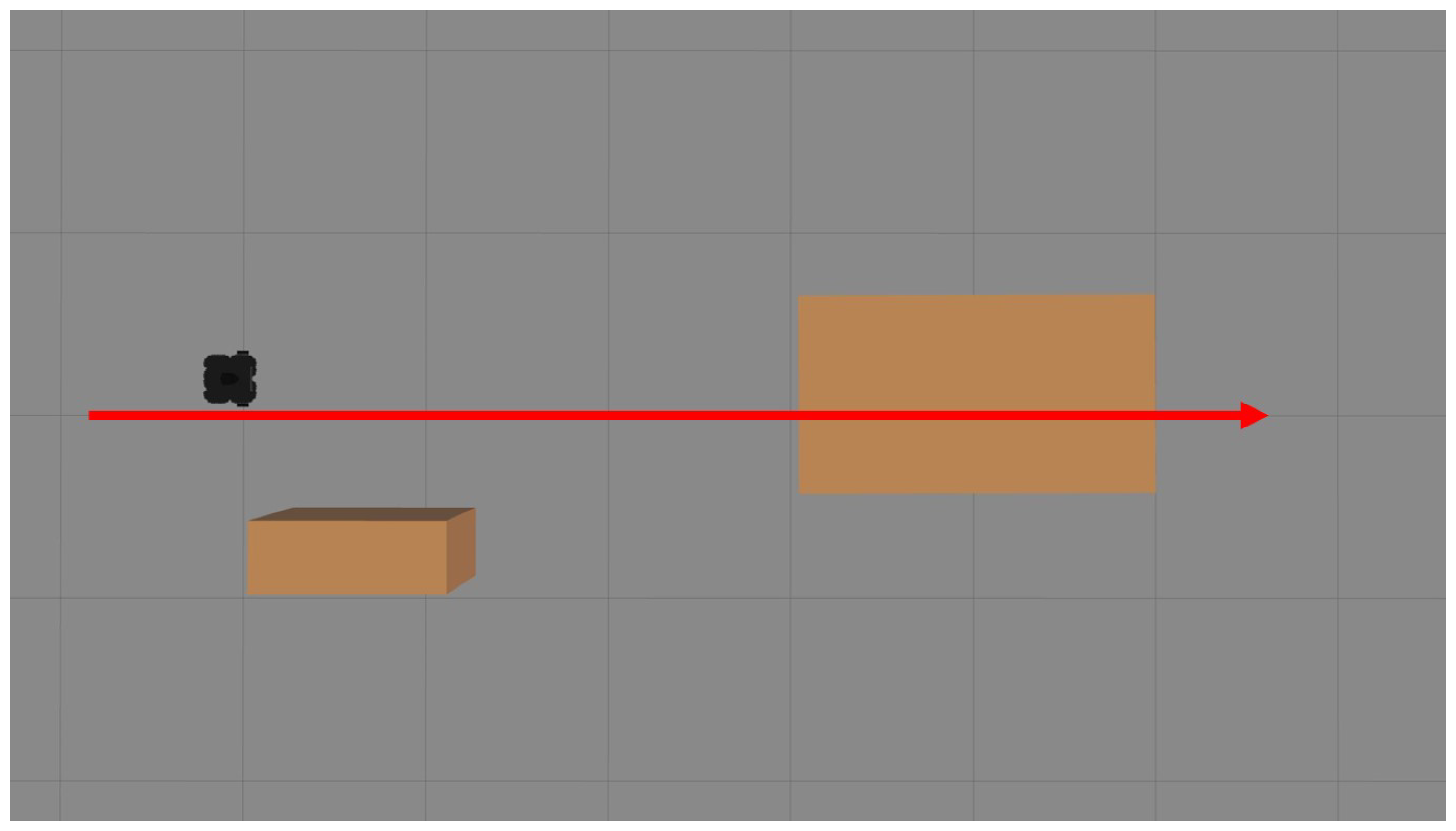
To validate the performance of the PSF algorithm, simulations were conducted using the Gazebo 11 virtual simulation software in Ubuntu 20.04. The TurtleBot3 Waffle model was employed as the mobile robot. A straight global path of 8 m in length was utilized, with two obstacles placed along its trajectory. The initial coordinates of the robot relative to the starting point of the global path were
. The simulation was performed on a system with the following specifications: Ubuntu 20 operating system, Intel i5-12 processor, and 16 GB of RAM. The simulation environment is illustrated in
Figure 5. The parameters of the PSF algorithm are shown in
Table 1.
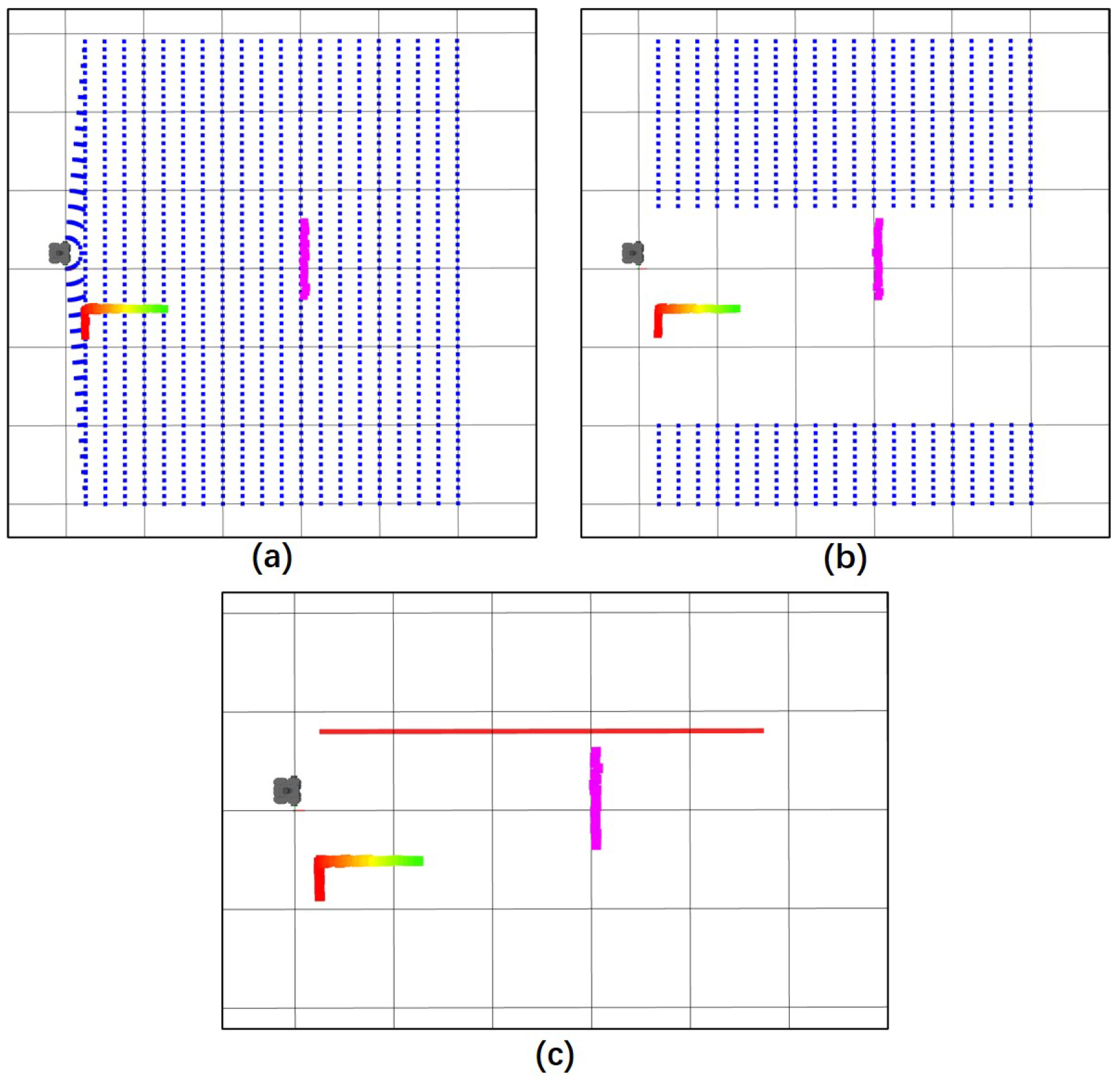
The simulation results of the exploration stage of the PSF algorithm are shown in
Figure 6. It can be seen that the exploration stage of the PSF algorithm can easily find a preliminary path that is closest to the global path and does not collide with the obstacles.
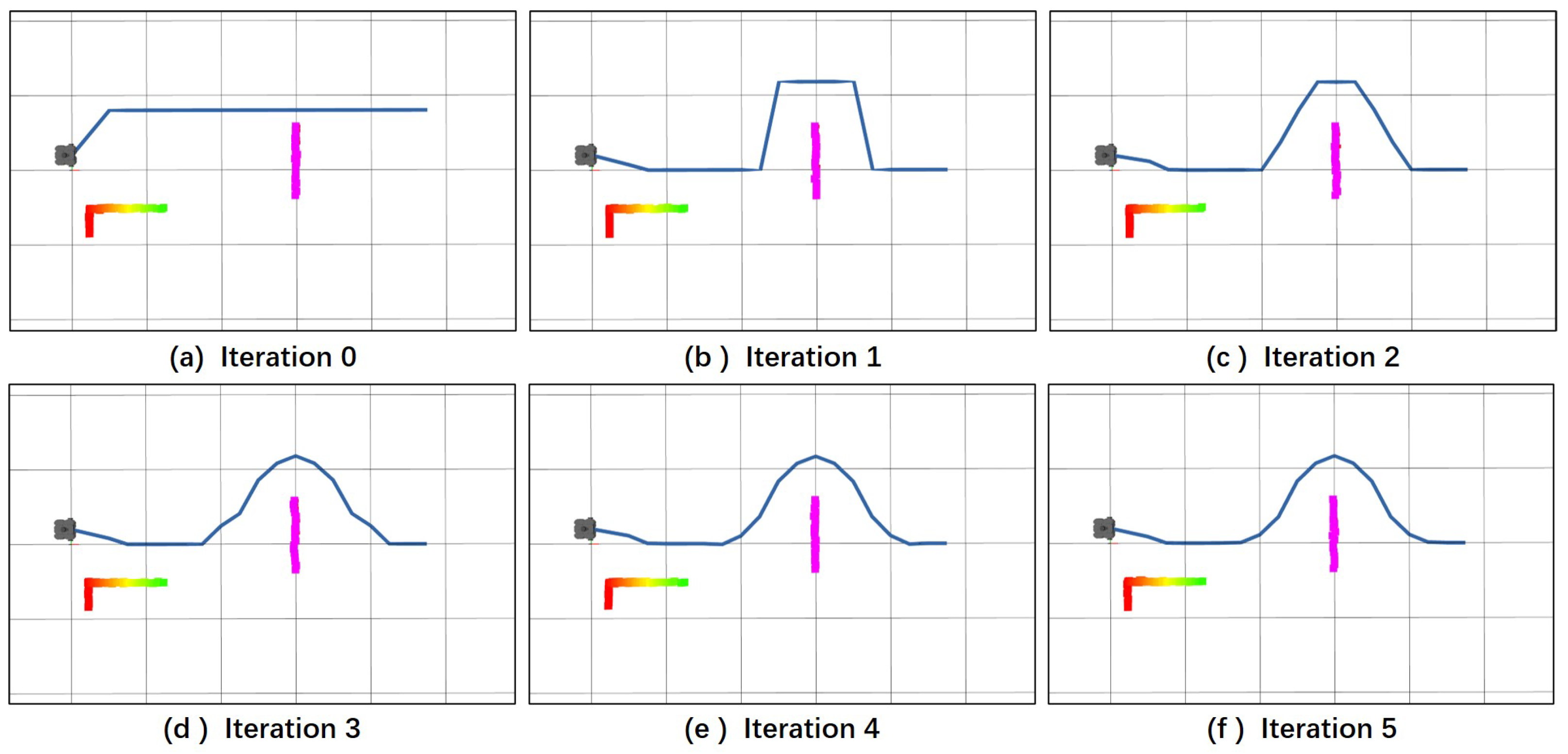
The optimization process during the PSF algorithm optimization stage is depicted in
Figure 7. Upon the first iteration of preliminary path optimization, deviations from constraints cause the initial path to deform towards the global path, while obstacle constraints prevent the deformation of the preliminary path around obstacles. As the number of optimization iterations increases, the influence of velocity constraints on the preliminary path gradually intensifies. By the fifth iteration, the optimization algorithm has converged, yielding the optimal local path. It can be observed that due to the PSF algorithm’s optimization solely focusing on longitudinal distance, the algorithm achieves convergence within a short timeframe. Furthermore, obstacle selection is applied, retaining only relevant obstacles, significantly enhancing the efficiency of local path planning.
4.2. Comparative Simulations
In the comparative simulations, the move_base framework in ROS was utilized for navigation. The comparative algorithms included the dwa_local_planner and teb_local_planner packages within move_base. The navigation parameters were selected from the parameter files officially provided for TurtleBot. This study primarily focuses on how to avoid obstacles in the environment using a local path planning algorithm while ensuring that the global path remains unchanged. Additionally, the local path must closely adhere to the global path. It is important to note that the global_planner in move_base performs global path planning at a certain frequency or re-plans when local path planning fails. Consequently, the default global_planner in move_base does not align with the problem addressed in this study.
Therefore, a global_planner_plugin [
25] with two modes was developed. One mode generates a straight-line path between the robot’s position and the target point. This mode prioritizes the robot reaching the target directly and is thus referred to as the “Goal” mode. The other mode first plans a perpendicular path from the robot’s position to the global path, then plans a straight-line path from the intersection point to the target point. This mode prioritizes the robot reaching the global path first and is therefore referred to as the “Path” mode.
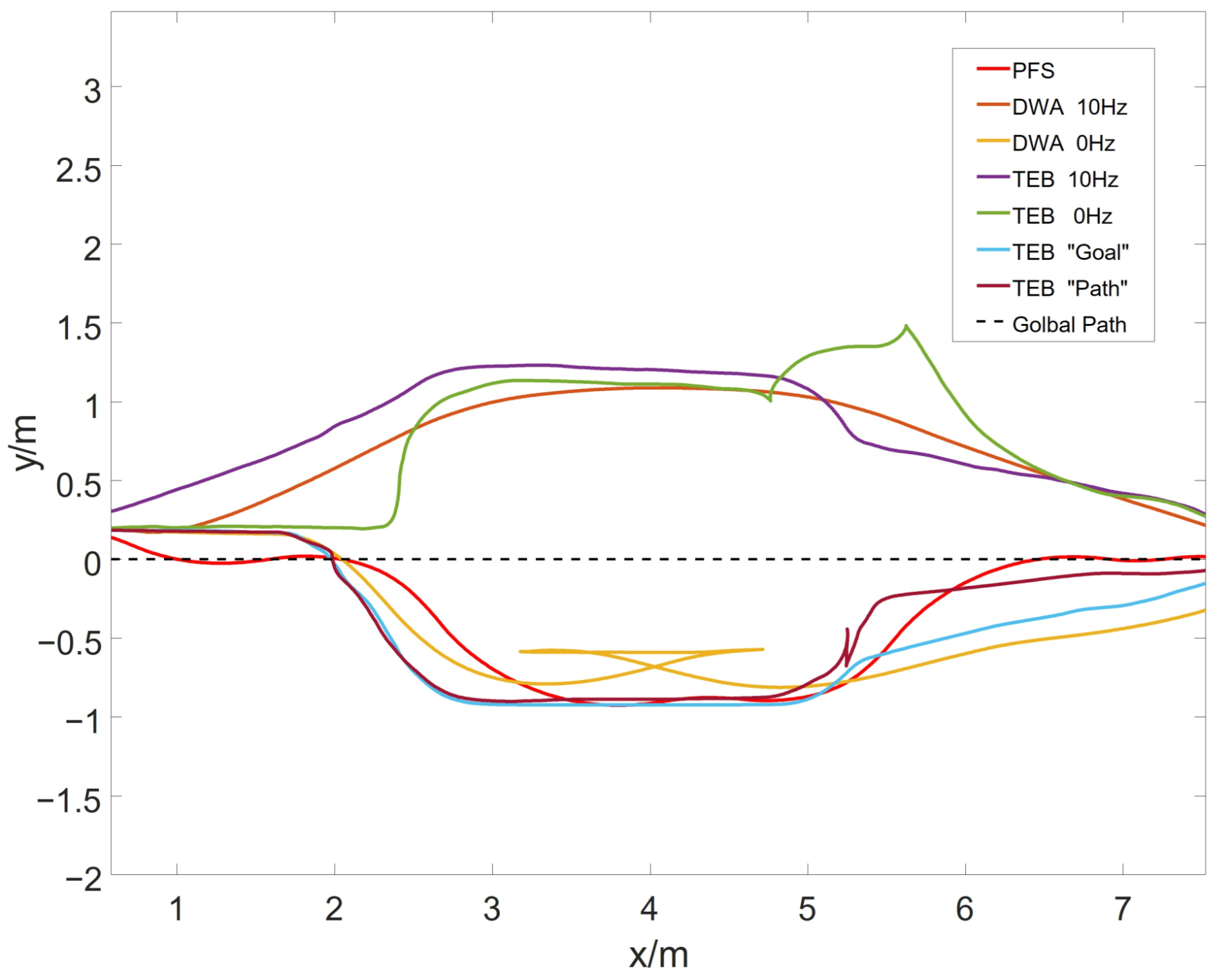
In the comparative simulations, three sets of trajectory comparisons were conducted. To ensure fair comparisons, the parameters’ comparative algorithms followed the empirical selection (without altering the official parameters), and the parameters were tested to achieve a favorable performance. The first and second sets utilized traditional navigation methods for mobile robots, specifically the global_planner combined with either the dwa_local_planner or teb_local_planner. Initially, the global_planner’s planning frequency was set to 10 Hz. Subsequently, the planning frequency was changed to 0 Hz, meaning that the global path was planned only once. The third set of simulations employed our global_planner_plugin to validate the obstacle avoidance and global path-following capabilities of traditional local planners. Since the DWA algorithm predicts the potential trajectories of the mobile robot within a forward simulation time for obstacle avoidance, it was found during actual testing that DWA has limited obstacle avoidance capability when the global path remains unchanged. Therefore, in the third set of simulations, only the TEB algorithm was tested. The simulation results are illustrated in
Figure 8.
The simulation results show that the PSF algorithm performs best in following the global path. When the robot deviates from the global path or obstacle avoidance ends, it can reach the global path in a shorter distance. The other two algorithms show different performances in different navigation modes. The errors with the global path are shown in
Table 2.
It is evident that under traditional navigation modes, both local path planning algorithms can achieve smooth movement and obstacle avoidance for the mobile robot. However, their local planning capabilities rely on the paths planned by the global_planner. When using the global_planner_plugin, the TEB algorithm exhibited good robustness. In the “Path” mode, the robot prioritized moving toward the global path even after obstacle avoidance. However, since the goal of the TEB algorithm is to plan the shortest possible path in terms of time, its performance in following the global path is not as excellent as that of the PSF algorithm.
4.3. Real Robot Experiments
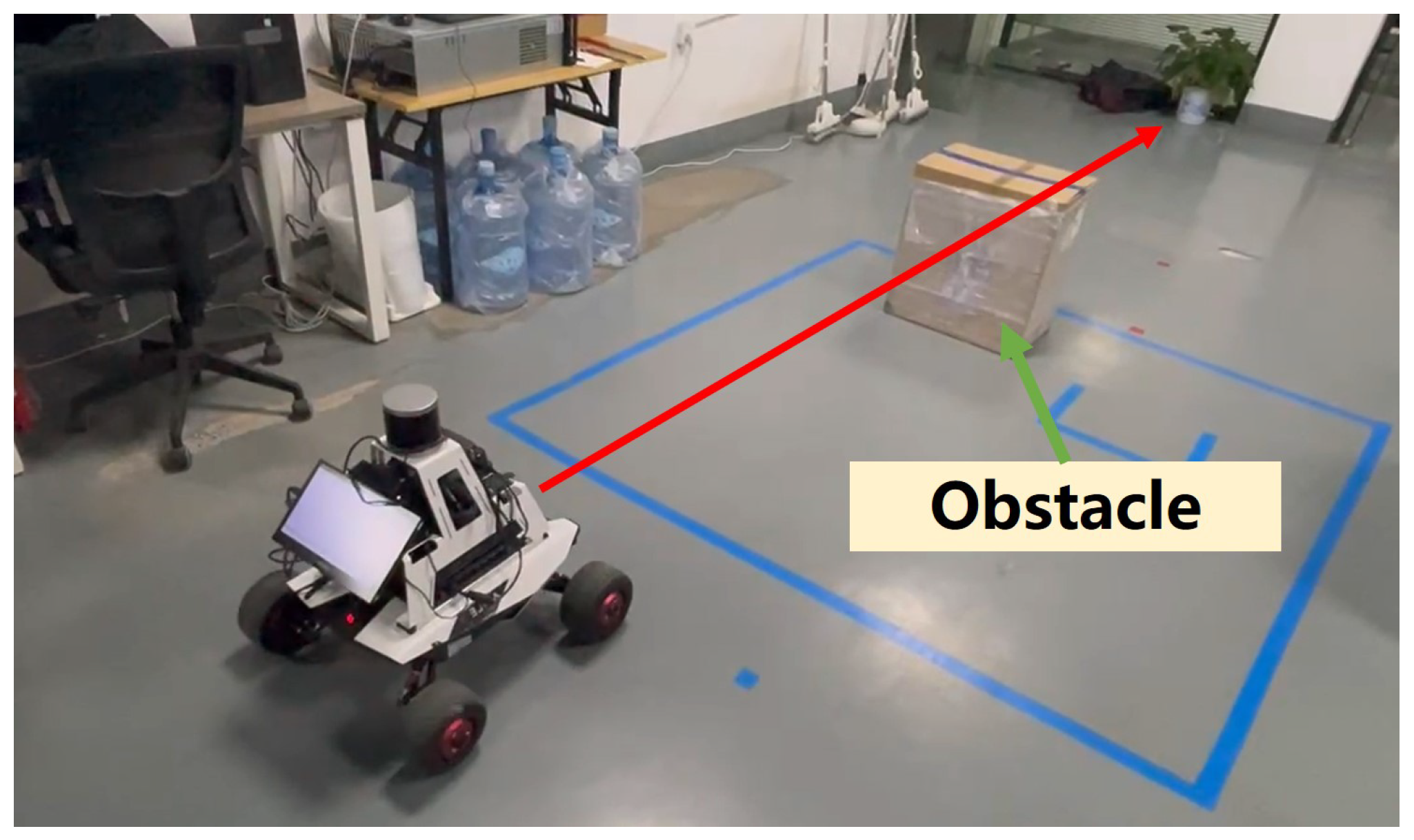
For the final validation experiment, tests were conducted using a Scout Mini robot platform. The same processor used in the simulation experiment was employed. A 5 m global path was designated, and a 30 cm × 20 cm × 50 cm obstacle was placed along this path. The experimental environment is depicted in
Figure 9.
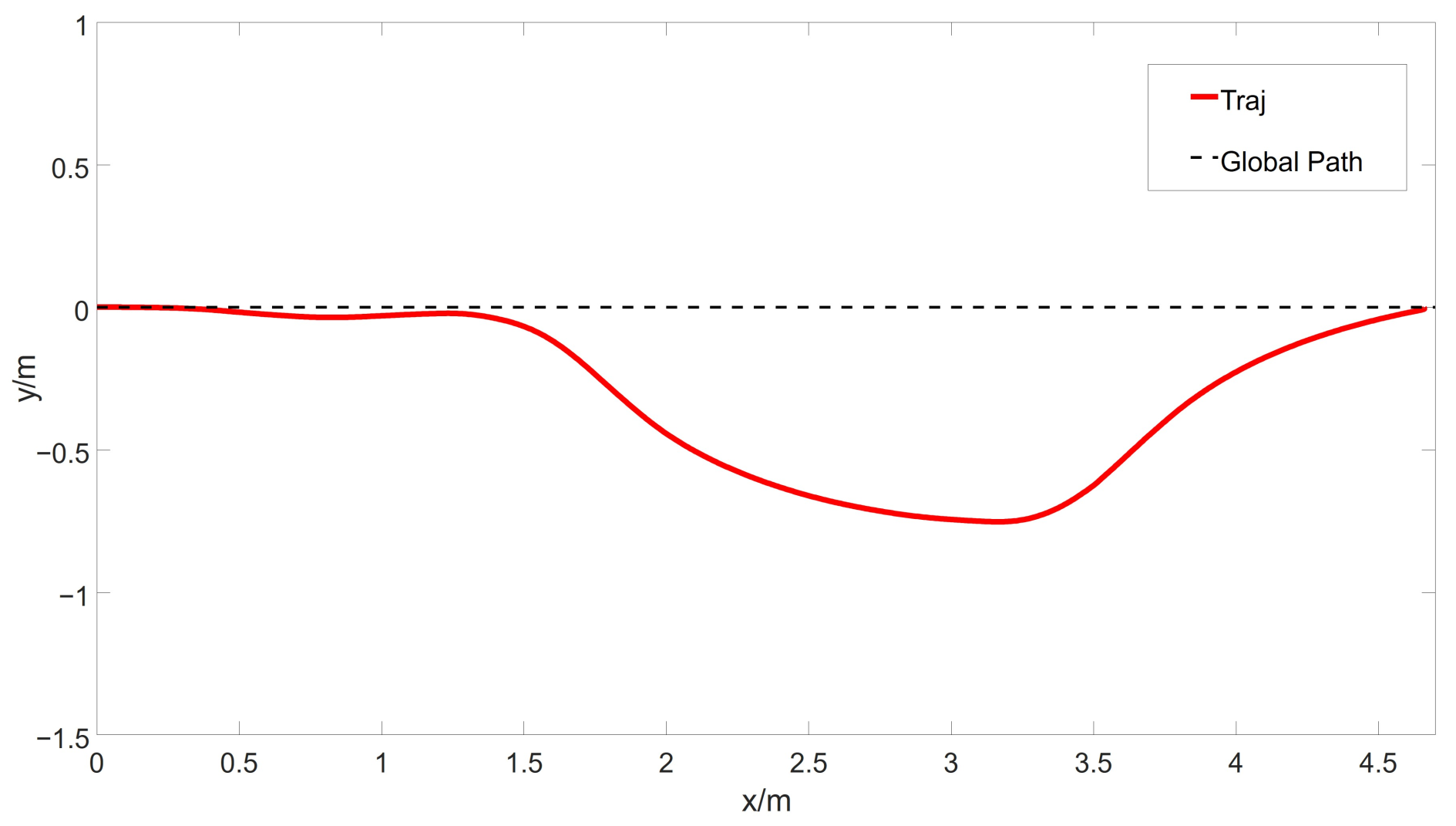
The experimental results, as illustrated in
Figure 10, show that the experiments on the real robot are consistent with the simulation results. Additionally, the test environment better reflects the real scene of robot operation. The results demonstrate the effectiveness of the PSF algorithm in complex and confined environments.
Furthermore, verification experiments on typical tasks were conducted using the PSF algorithm. These tasks resemble the operational tasks of vacuum cleaning robots and disinfection robots, requiring traversal of the environment via a zigzag path. The experimental environment and global path are depicted in
Figure 11.
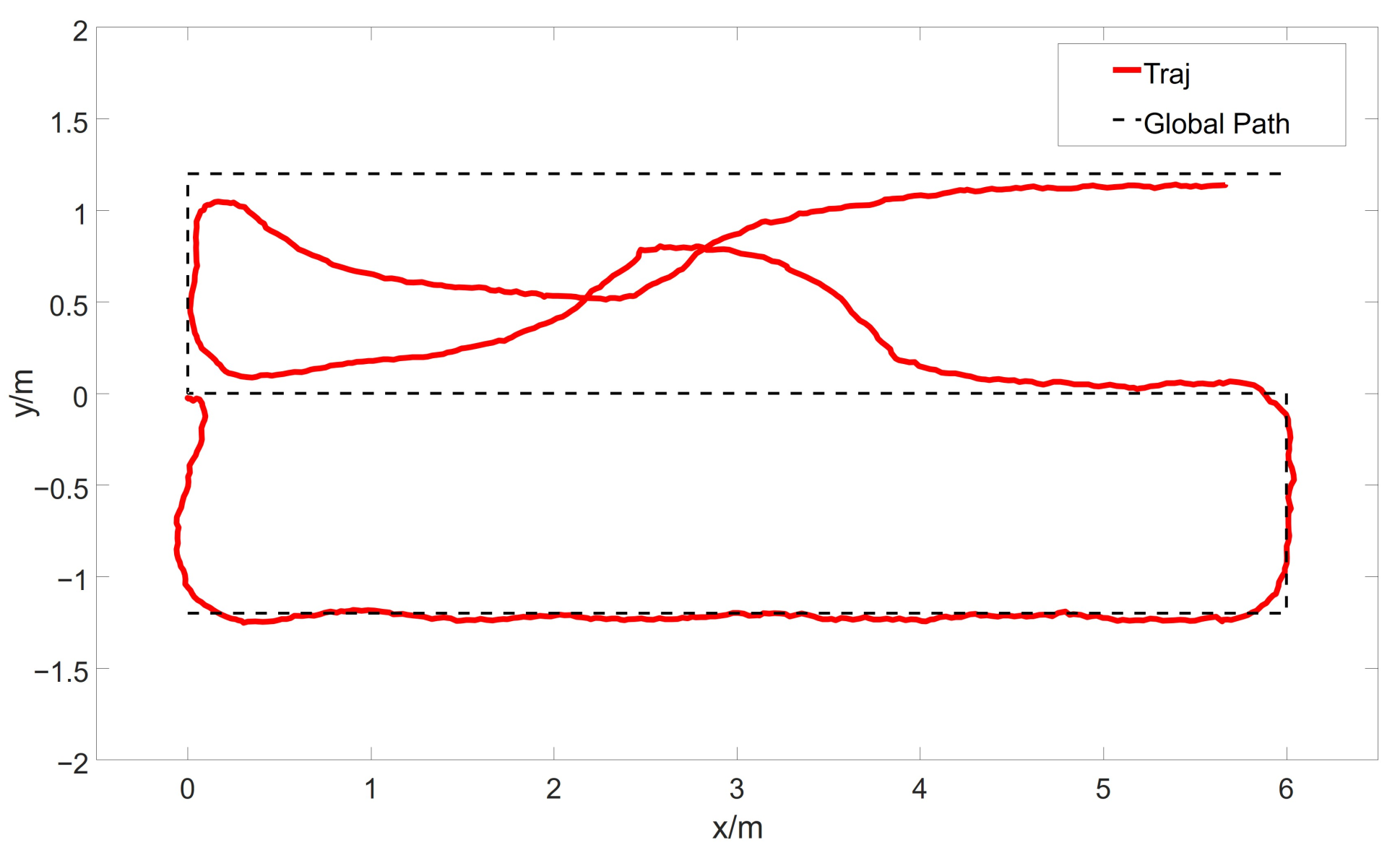
The robot departs from the origin and first reaches the starting point of the global path. It then traverses five segments of the path to reach the endpoint. Due to cumulative errors in odometry, there may be some influence on local planning. Therefore, for typical task experiments, we utilized high-precision laser odometry. This resulted in minor oscillations in the robot’s motion trajectory. The experimental results are shown in
Figure 12.
It is evident that the robot, while achieving obstacle avoidance during typical tasks, also swiftly returns to the global path. Throughout this process, the robot ensures that its local path adheres to kinematic constraints. Thus, the PSF algorithm can meet the task requirements of various mobile operation robots, including reconnaissance robots, guiding robots, floor-cleaning robots, and disinfection robots. It is worth noting that this paper focuses exclusively on relatively simple global paths. Currently, the proposed PSF algorithm does not support navigation tasks involving curved global paths. However, in future work, the PSF algorithm can be extended to accommodate curved global paths by using a transformation based on the Frenet coordinate system.
5. Conclusions
This paper presented a path stamping forming algorithm to decouple the local path planning problem into front-end sampling-based search and back-end trajectory optimization. During the exploration stage, the planning coordinate transformation was established, and a collision-free preliminary path was searched. In the optimization stage, several constraints from the path deviation, the obstacle, and the velocity were considered. Then, an optimal and safe local path was generated to adhere to kinematic constraints. Comparative simulations and real-world experiments were conducted to validate the effectiveness and performance of the proposed planning algorithm. This paper considered relatively simple global paths, where the proposed algorithm cannot support navigation tasks involving curved global paths. Therefore, in future work, the proposed algorithm can be extended to accommodate curved global paths by using a transformation based on the Frenet coordinate system, especially in structured environments that involve challenges such as avoiding corners, traversing ramps, and other complex features.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}