
Performance and Effectiveness of the Passive-Compliant Citrus-Picking Manipulator


Abstract
1. Introduction
2. Methods
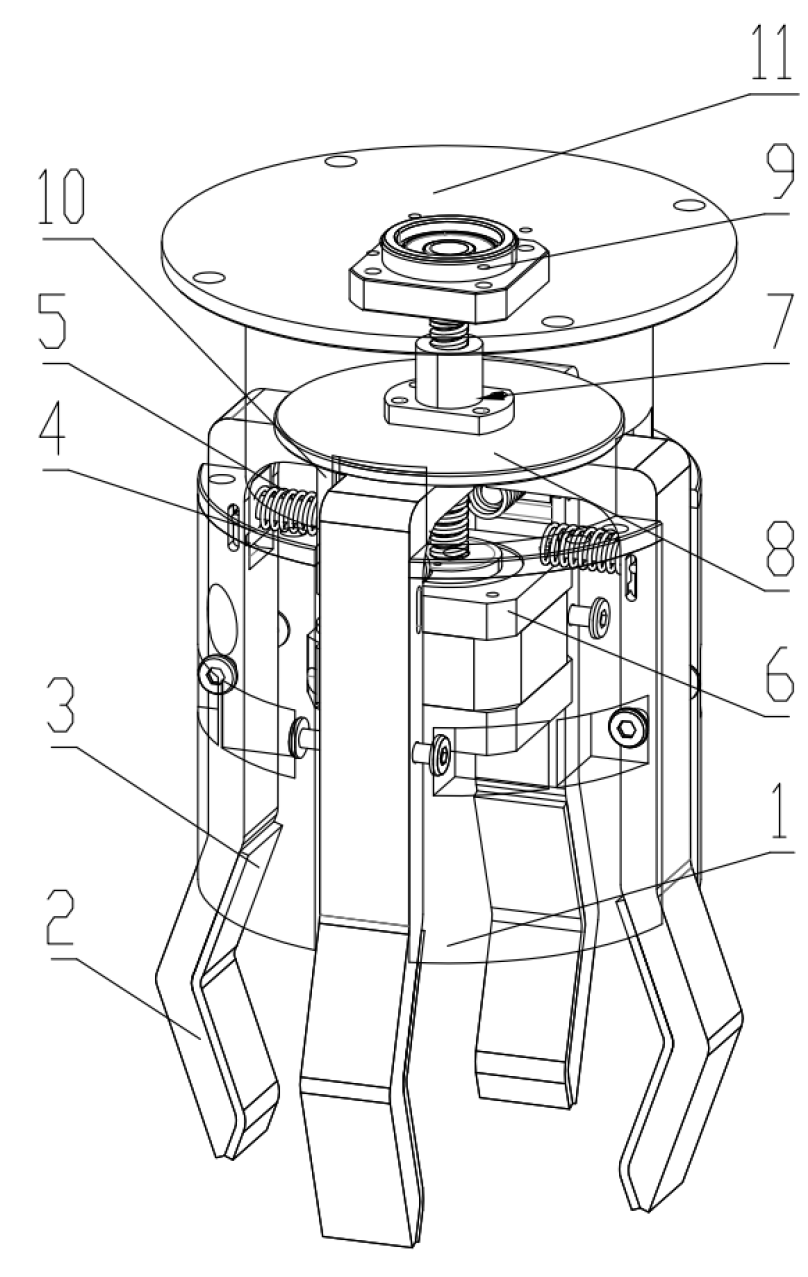
2.1. Overall Structure Scheme
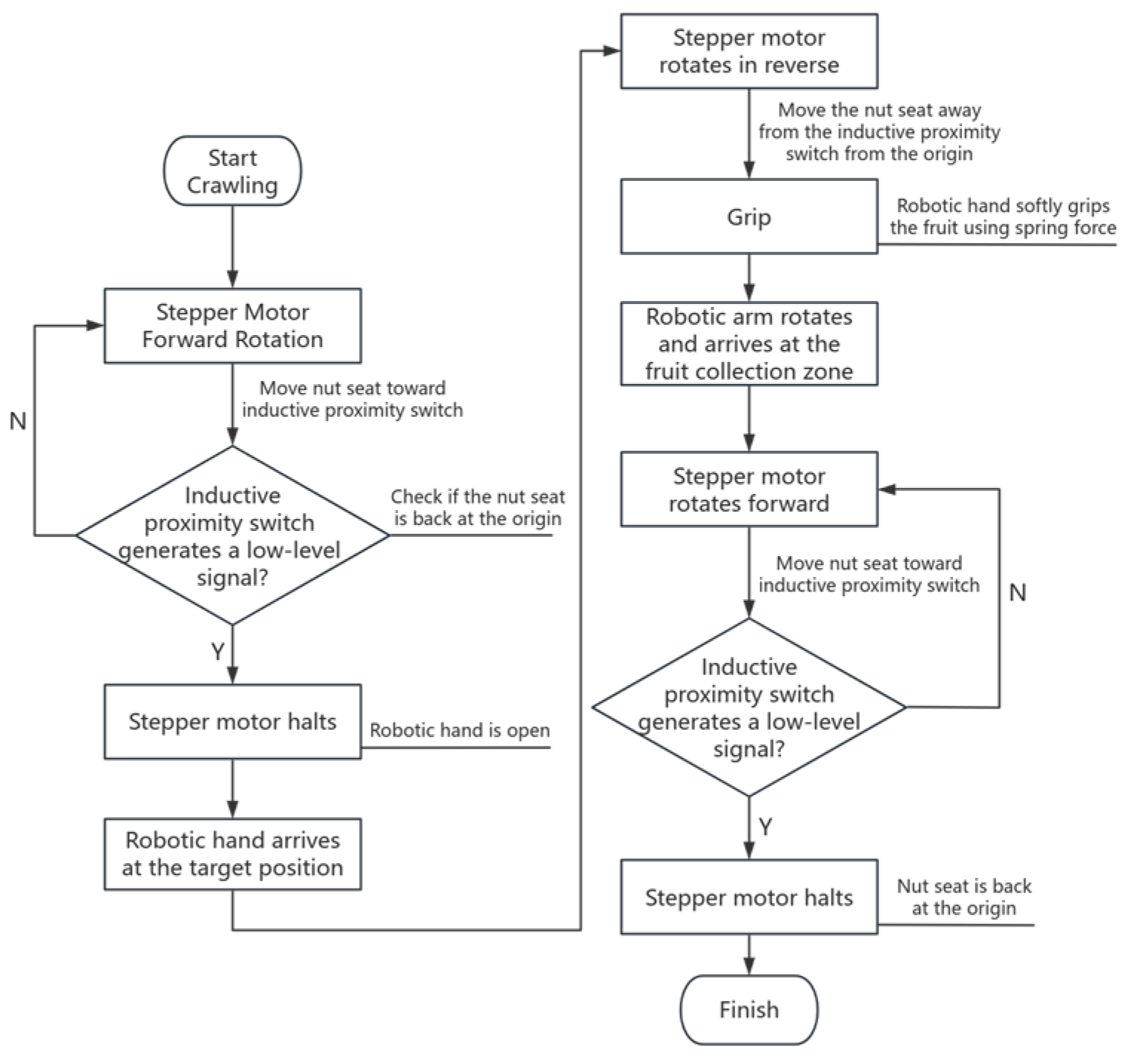
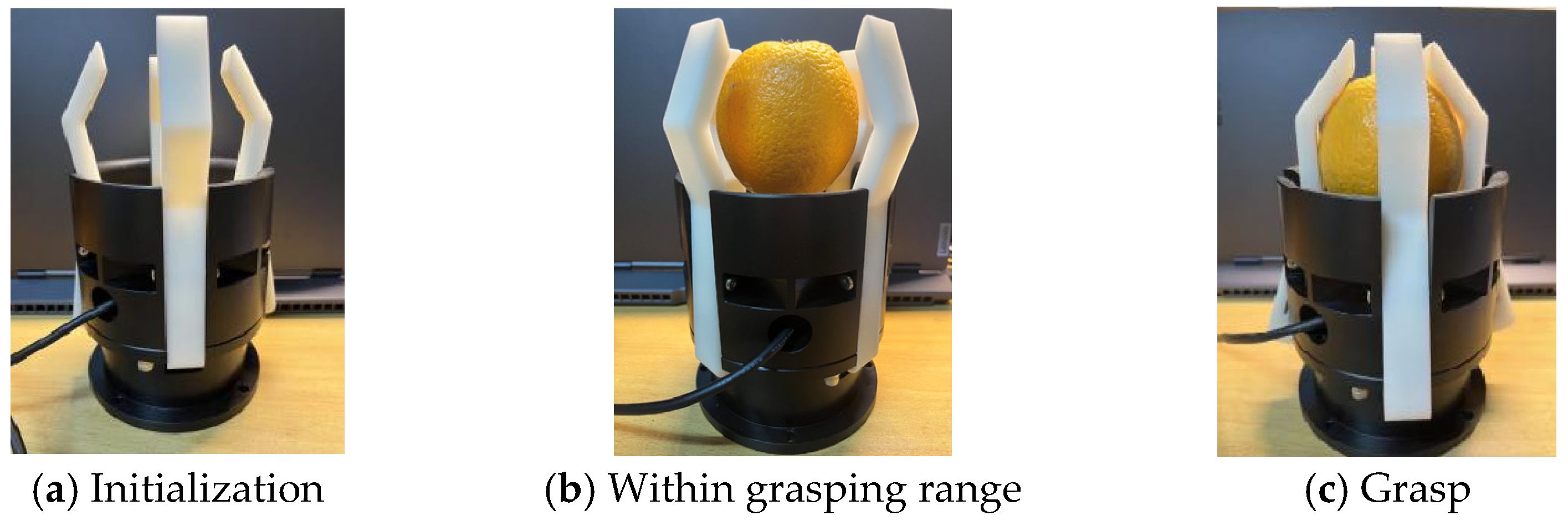
2.2. Working Principle of the Picking Manipulator
3. Parameter Optimization of Picking Manipulator
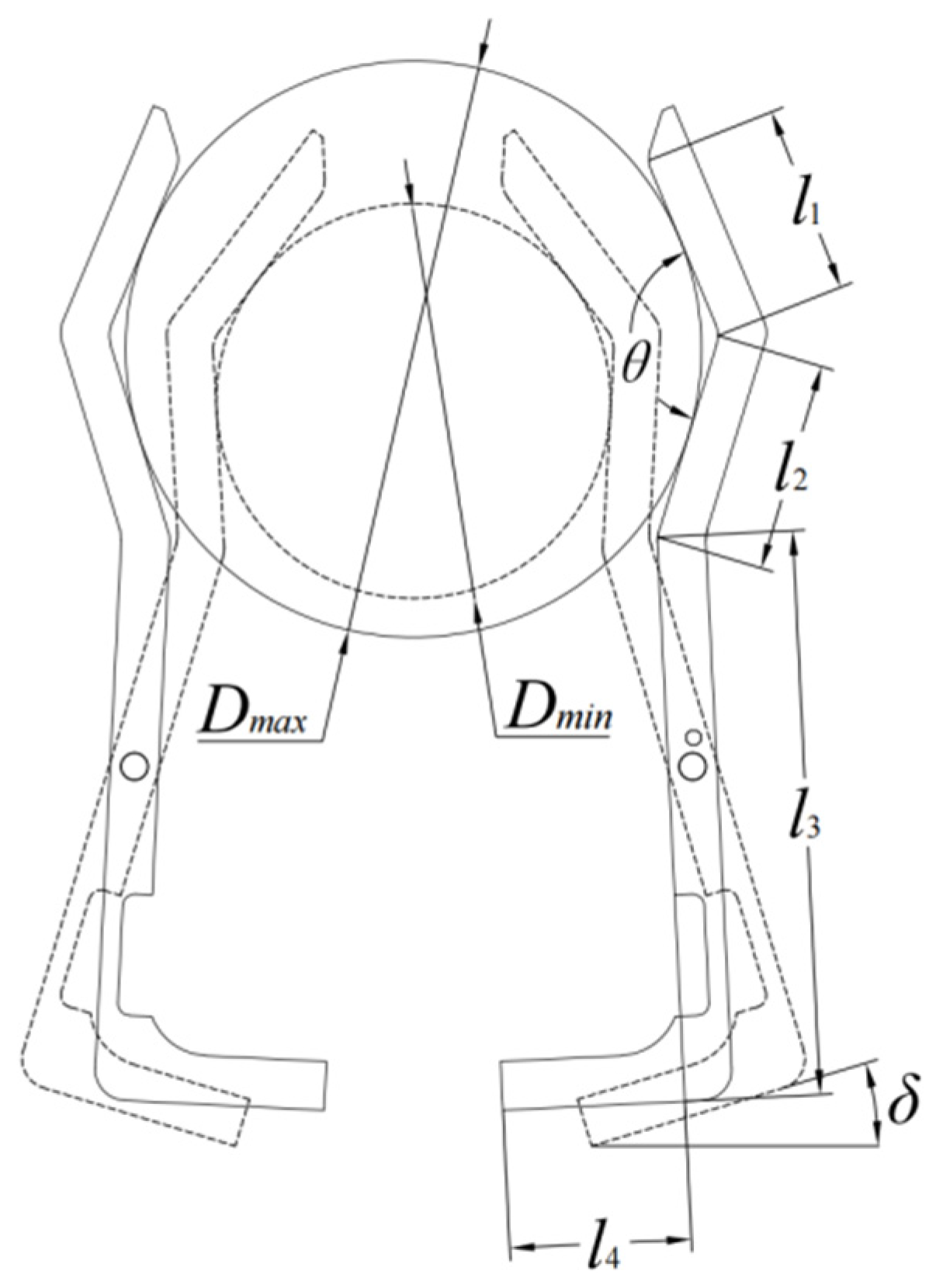
3.1. Citrus Mathematical Model and Grasping Component Optimization
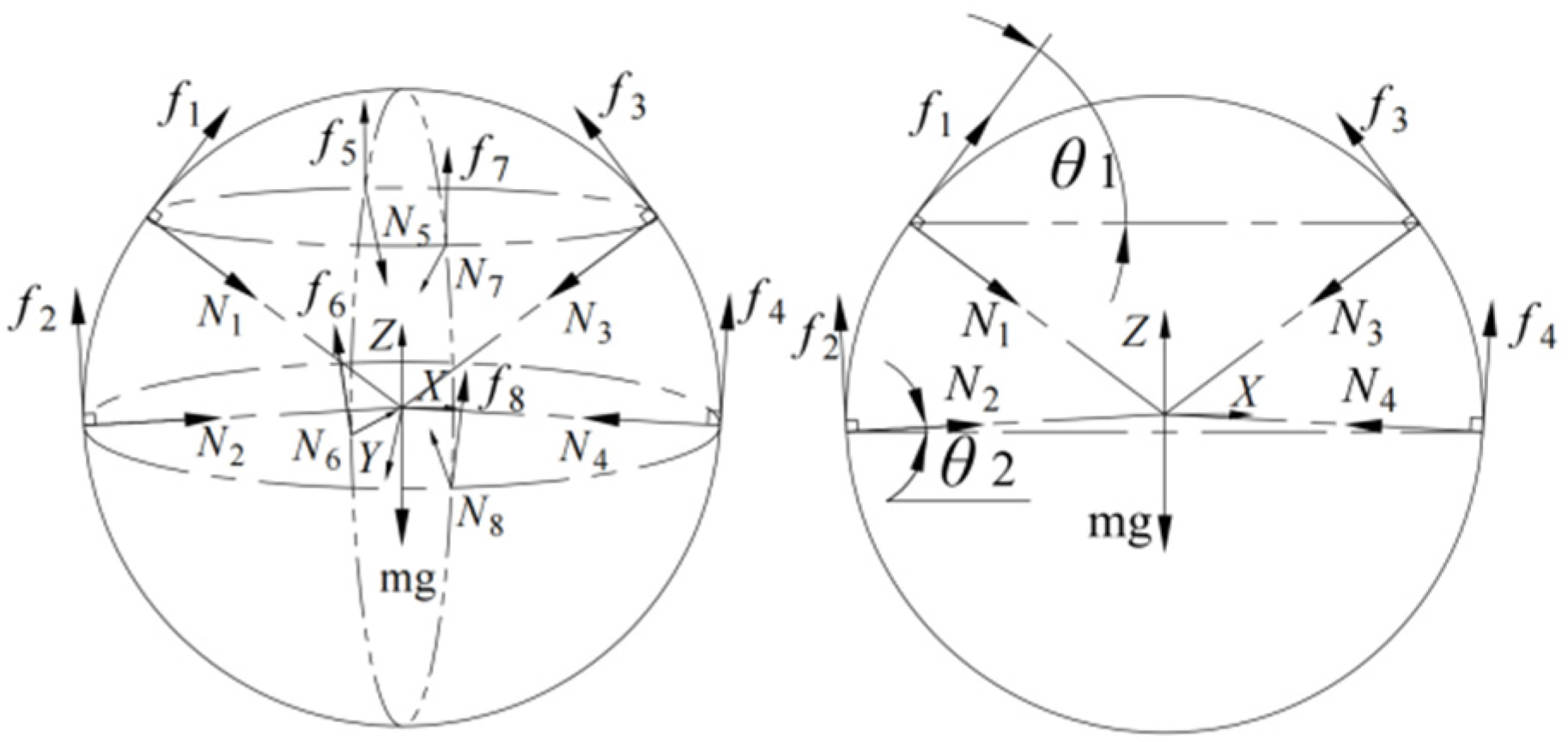
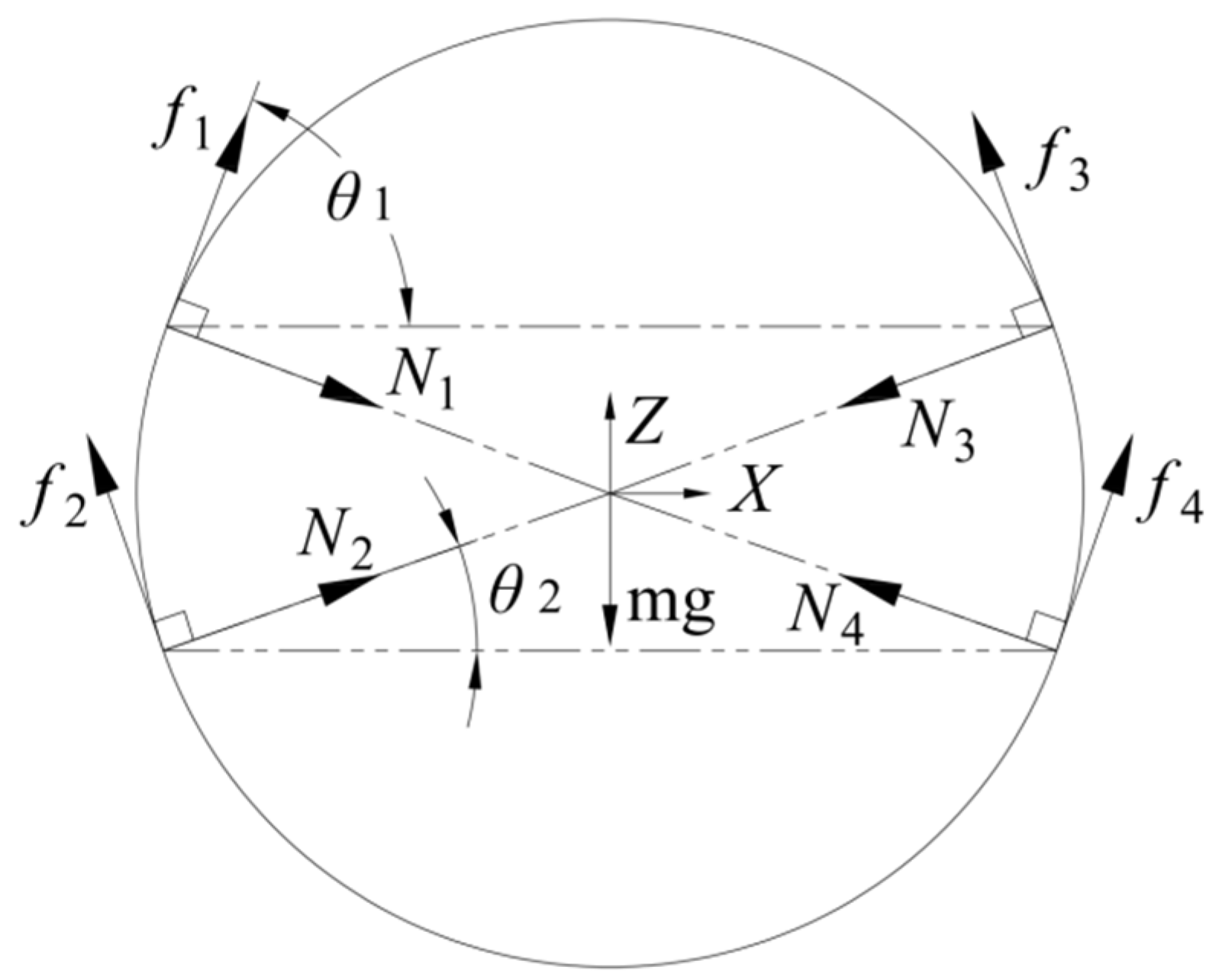
3.2. Stress Analysis of Citrus
3.3. Grasping Component Force Analysis and Component Selection
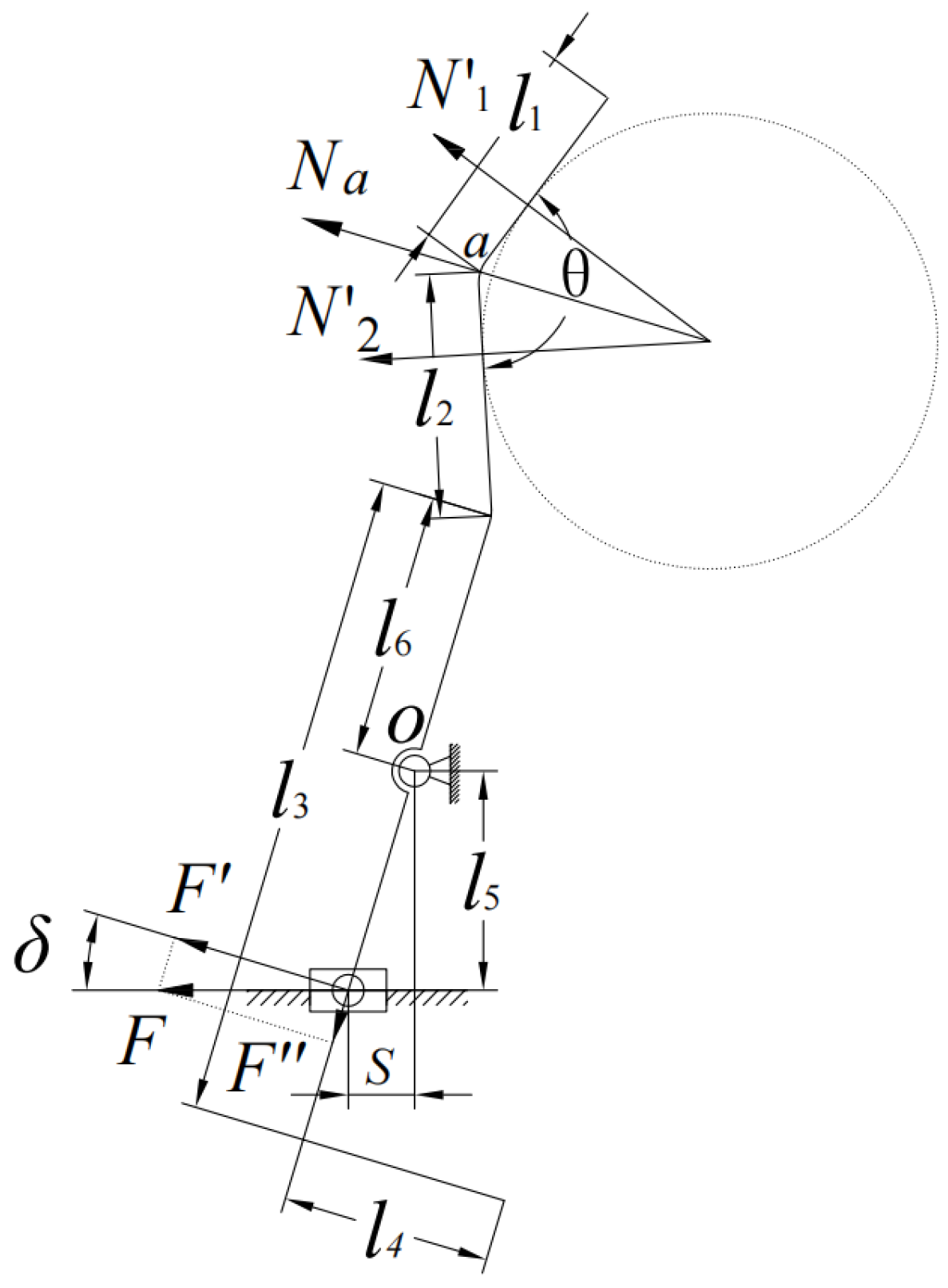
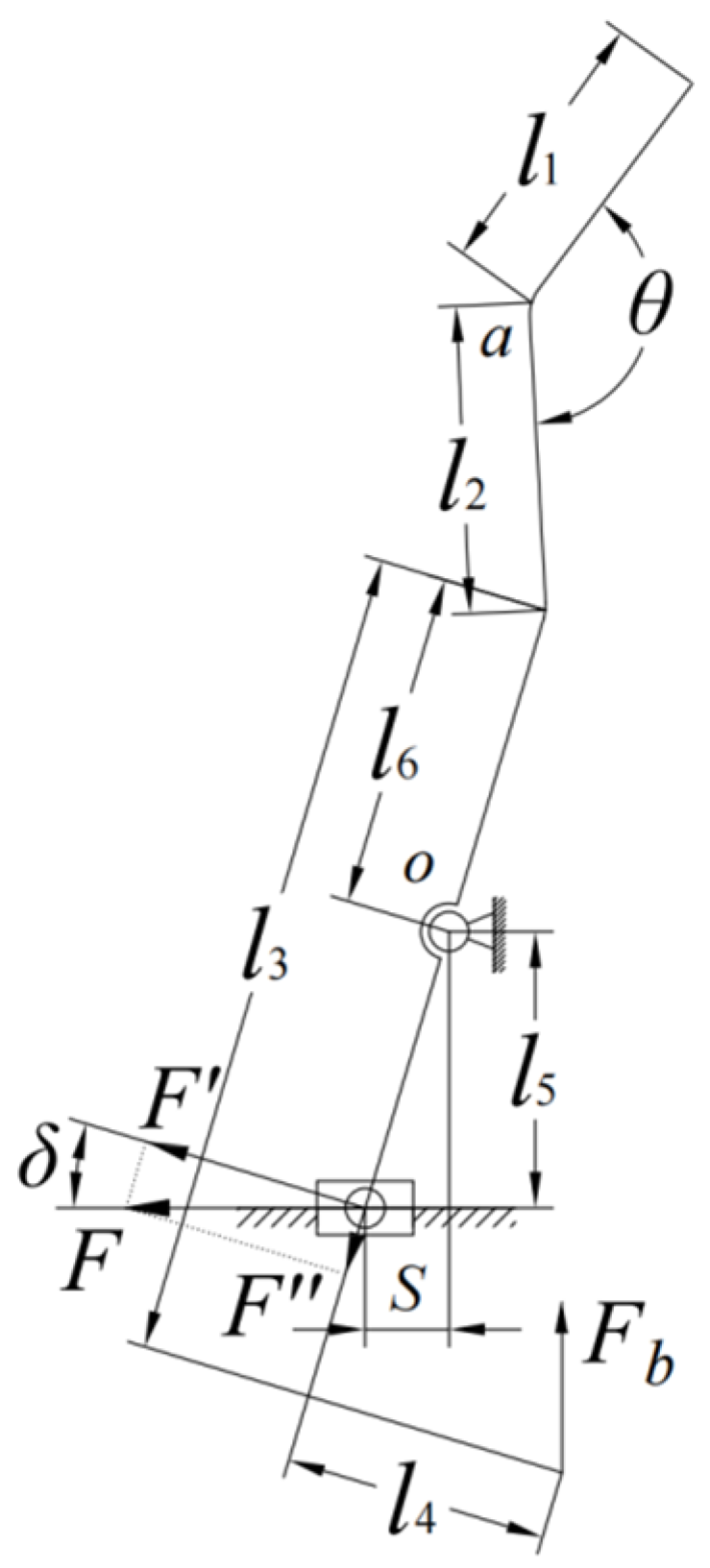
3.3.1. Force Analysis of Grasping Member
3.3.2. Parts Selection
4. Results
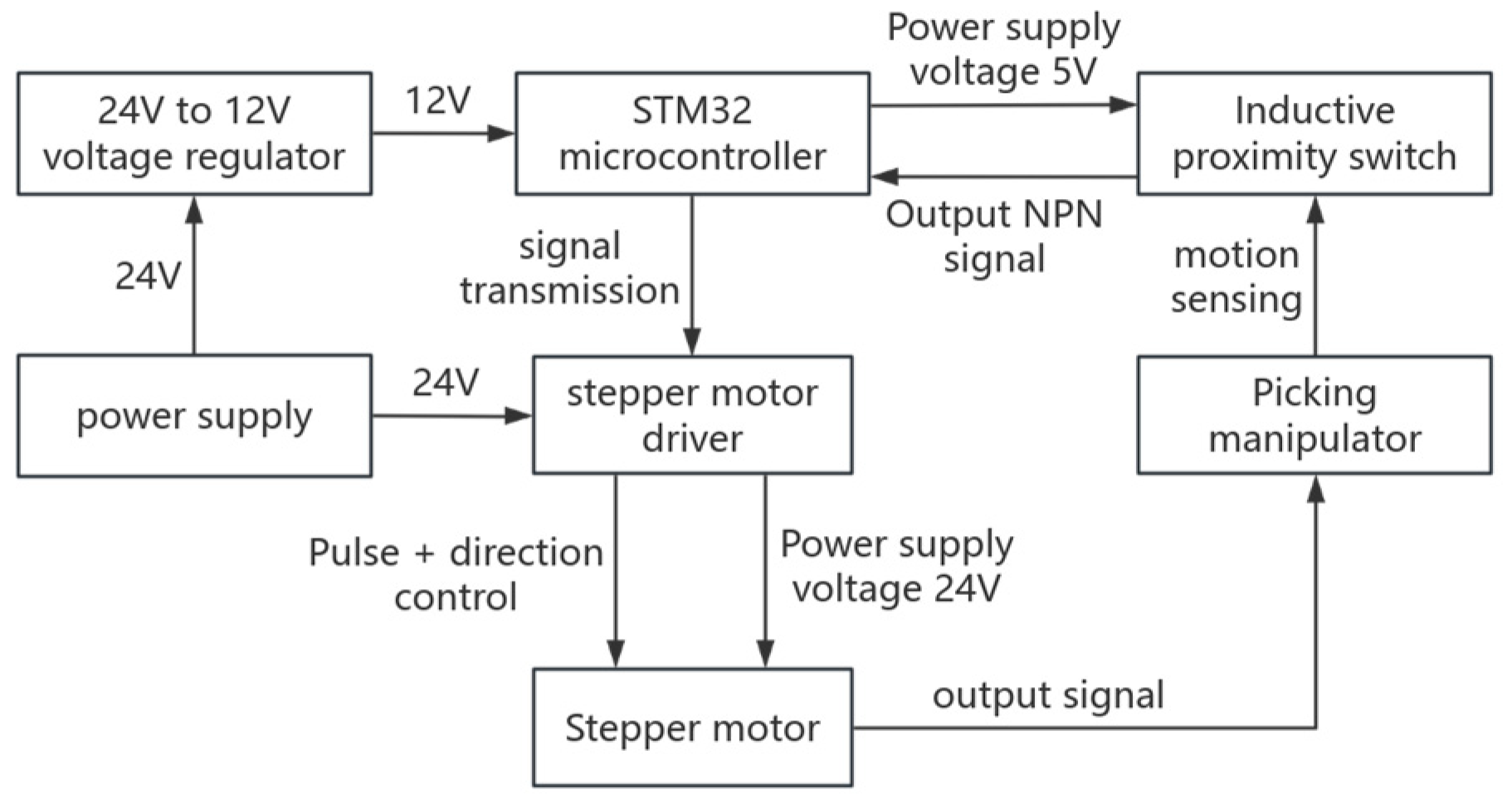
4.1. Control System Constitution
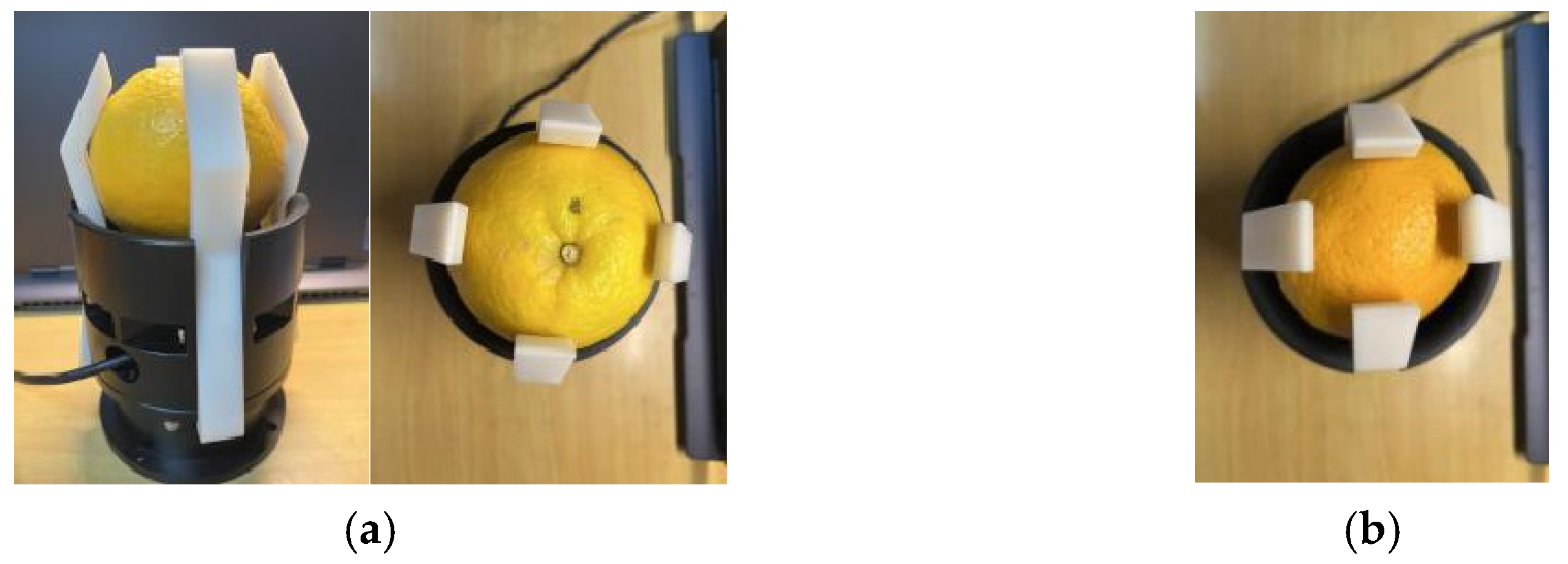
4.2. Envelope Test in Laboratory Environment
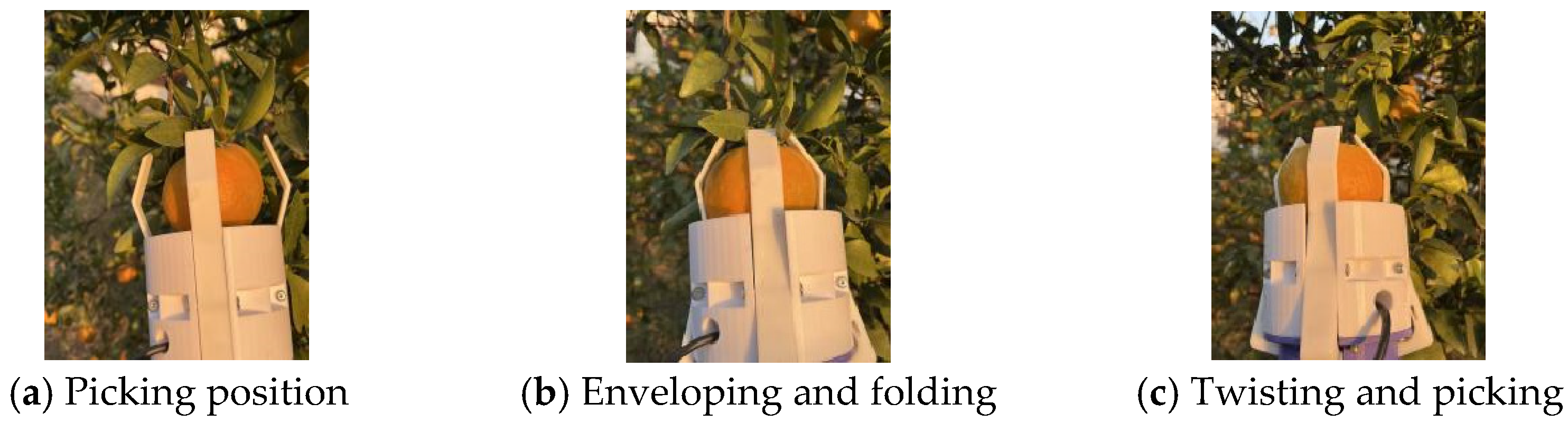
4.3. Picking Experiment in Orchard Environment
5. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zheng, Y.J.; Jiang, S.J.; Chen, B.T.; Lu, H.T.; Wan, C.; Kang, F. Research Progress on Mechanized Technology and Equipment for Orchards in Hilly and Mountainous Areas. Trans. Chin. Soc. Agric. Mach. 2020, 51, 1–20. [Google Scholar]
- Wang, M.Y.; Wang, D.; Song, W.D.; Sun, Y.L.; Zhang, Z.Y.; Zhao, X.P. Research Status and Prospects of Mushroom Harvesting Robots. Trans. Chin. Soc. Agric. Mach. 2024, 55 (Suppl. 1), 1–8. [Google Scholar]
- Sun, Y.F. Development Status and Prospects of Agricultural Robots. Mod. Agric. Res. 2022, 28, 92–94. [Google Scholar] [CrossRef]
- Yuan, Z.Y.; Chen, J. Development Status, Issues, and Countermeasure Analysis of Fruit and Vegetable Harvesting Robots. Sichuan Agric. Mach. 2014, 6, 16–18. [Google Scholar]
- Li, H.B.; Shi, Y. A Review of Research on Orchard Harvesting Robots. Chin. Agric. Inf. 2019, 31, 1–9. [Google Scholar]
- Chen, X.; Hua, C.; Zhu, Y.L.; Liu, Y. Research Progress on End-Effector of Fruit Picking Robots. Forest Mech. Woodwork. Equip. 2020, 48, 4–10. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, J.; Hu, D.; Yu, S.C.; Li, H. Development Trends of End-Effector in Citrus Picking Robots. Agric. Technol. Equip. 2024, 12, 8–11+15. [Google Scholar]
- Sun, C.; Yan, J.; Zhang, F.; Gou, Y.M.; Xu, Y. Research Progress on Vegetable Picking Robots and Key Technologies. J. Chin. Agric. Mech. Sci. 2023, 44, 63–72. [Google Scholar] [CrossRef]
- Liu, F.; Yang, G.; Yang, K. Research on Flexible Mechanical Hands for Agricultural Picking Robots. J. Chin. Agric. Mech. Sci. 2019, 40, 173–178. [Google Scholar]
- Wu, D.; Fu, L.; Cao, C.; Li, C.; Xu, Y.P.; Ding, D. Design and Experiment of Branch-shaking Oil Tea Fruit Harvesting Machine. J. Agric. Mech. Sci. 2020, 51, 176–182+195. [Google Scholar]
- Wang, K.; Zhang, W.; Luo, Z.; Zhang, Y.Z. Design and Experiment of Impact-type Pine Cone Harvesting Robot. J. Agric. Mech. Sci. 2020, 51, 26–33. [Google Scholar]
- Hu, H.R.; Zhang, Y.Y.; Zhou, J.L.; Chen, Q.; Wang, J.P. Research Status of End Effectors for Fruit and Vegetable Harvesting Robots. J. Chin. Agric. Mech. Sci. 2024, 45, 231–236. [Google Scholar]
- Zhang, Y.Y.; Zhou, J.L.; Hu, H.R.; Wang, J.P. Research Analysis and Development Trends of End Effectors for Fruit and Vegetable Harvesting. For. Mech. Woodwork. Equip. 2022, 50, 4–10+17. [Google Scholar] [CrossRef]
- Yuan, J. Research Progress and Analysis of Selective Harvesting Robot Technology. Agric. Mech. J. 2020, 51, 1–17. [Google Scholar]
- Chen, Z.; Yang, M.; Li, Y.; Yang, L. Design and Experiment of Tomato Harvesting End-Effector Based on Pneumatic Non-Damaging Gripping Control. Agric. Eng. J. 2021, 37, 27–35. [Google Scholar]
- Silwal, A.; Davidson, J.R.; Karkee, M.; Mo, C.; Zhang, Q.; Lewis, K. Design, Integration, and Field Evaluation of a Robotic Apple Harvester. J. Field Robot. 2017, 34, 1140–1159. [Google Scholar]
- Guo, T.; Zheng, Y.; Bo, W.; Liu, J.; Pi, J.; Chen, W.; Deng, J. Research on the Bionic Flexible End-Effector Based on Tomato Harvesting. J. Sensors 2022, 2022, 2564952. [Google Scholar]
- Hohimer, C.J.; Wang, H.; Bhusal, S.; Miller, J.; Mo, C.; Karkee, M. Design and Field Evaluation of a Robotic Apple Harvesting System with a 3D-Printed Soft-Robotic End-Effector. Trans. ASABE 2019, 62, 405–414. [Google Scholar]
- Zhang, S.; Bao, G.; Yang, Q.; Chen, L. Mechanical Properties of Citrus Based on Robotic Harvesting. J. Zhejiang Univ. Technol. 2012, 40, 340–344. [Google Scholar]
- Jia, B.Z.; Zhu, A.M.; Yang, S.X.; Mittal, G.S. Integrated gripper and cutter in a mobile robotic system forharvesting greenhouse products. In Proceedings of the 2009 IEEE International Conference onRobotics and Biomimetics, Guilin, China, 19 December 2009; pp. 1778–1783. [Google Scholar]
- Jiang, Y.H.; Liu, J.; Hu, Z.K.; Zhang, W. Design and Experiment of the End-Effector for Navel Orange Harvesting Based on Underactuated Principle. J. Mech. Transm. 2024, 48, 105–113. [Google Scholar] [CrossRef]
- Fu, M.; Guo, S.K.; Zhang, L.Y.; Hao, Y.L.; Li, C.Y. Design of a Kiwi Harvesting Machine Based on TRIZ. J. Chin. Agric. Mech. Chem. 2024, 45, 1–7. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, H.B.; Zhang, M.; Ma, J.T.; Liu, B.; He, Y. Design and Experiment of a Snake-Like Gripping End-Effector for Citrus Harvesting. Agric. Mech. J. 2018, 49, 54–64. [Google Scholar]
- Xu, L.M.; Liu, X.D.; Zhang, K.L.; Xing, J.J.; Yuan, Q.C.; Chen, J.W.; Duan, Z.Z.; Ma, S.; Yu, C.C. Design and Experiment of End-Effector for Navel Orange Harvesting Robot. Agric. Eng. J. 2018, 34, 53–61. [Google Scholar]
- Li, G.L.; Ji, C.Y.; Zhai, L.X. Research Progress and Analysis of End-Effector for Fruit and Vegetable Harvesting Robots. China Agric. Mach. Chem. J. 2014, 35, 231–236+240. [Google Scholar]
- Davidson, J.R.; Silwal, A.; Hohimer, C.J.; Karkee, M.; Mo, C.; Zhang, Q. Proof-of-Concept of a Robotic Apple Harvester. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 634–639. [Google Scholar]
- Pi, J.; Kong, J.; Zhou, K.; Liu, J. Research and Design of Coated Tomato Harvesting End-Effector. Agric. Mech. Res. 2024, 46, 148–155. [Google Scholar] [CrossRef]
- Wei, B.; He, J.; Shi, Y.; Jiang, G.; Zhang, X.Y.; Ma, Y. Design and Experiment of an Underactuated Citrus Harvesting End-Effector. Trans. Chin. Soc. Agric. Mach. 2021, 52, 120–128. [Google Scholar]
- Yu, L.; Yu, G.; Wu, H.; Sun, F.X.; Qian, M.B. Design and Experiment of an Underactuated Joint-Type Citrus Harvesting End-Effector. Trans. Chin. Soc. Agric. Eng. 2023, 39, 29–38. [Google Scholar]
- He, J. Research on Non-Destructive Grasping of Robot End-Effector Based on Human-Machine Interaction. Master’s Thesis, Jilin University, Changchun, China, 2022. [Google Scholar] [CrossRef]
- Hu, G.; Chen, C.; Chen, J.; Sun, L.; Sugirbay, A.; Chen, Y.; Jin, H.; Zhang, S.; Bu, L. Simplified 4-DOF Manipulator for Rapid Robotic Apple Harvesting. Comput. Andelectron. Agric. 2022, 199, 107177. [Google Scholar] [CrossRef]
- Li, X.; Yu, J. Design of an Underactuated End-Effector for an Apple Harvesting Robot. J. Mech. Transm. 2015, 39, 74–77. [Google Scholar]
- Chen, Y.; Tan, J.; Jiang, Z.; Li, J.; Zou, X.; Wang, J. Finite Element Prediction and Experimental Verification of Clamping Damage by a Citrus Harvesting Robot. J. South China Agric. Univ. 2016, 37, 98–102. [Google Scholar]
- Fu, S. Design and Research of End-Effector for Citrus Harvesting Robot. Master’s Thesis, Chongqing University of Technology, Chongqing, China, 2017. [Google Scholar]
- Hannan, M.W.; Burks, T.F. Current developments in automated citrus harvesting. In Proceedings of the 2004 ASAE Annual Meeting. American Society of Agricultural and Biological Engineers, Ottawa, OT, Canada, 1–4 August 2004; p. 1. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Citrus Diameter/mm | Citrus Weight/kg | Maximum Gripping Weight/kg |
|---|---|---|
| 65 | 0.131 | 0.8 |
| 75 | 0.201 | 1.7 |
| 85 | 0.292 | 2.3 |
| 95 | 0.408 | 2.9 |
| Fruit Diameter Range/mm | 65~75 | 75~85 | 85~95 | Mean Value | |
|---|---|---|---|---|---|
| Number of rotations | (0,1) | 52 | 21 | 25 | 32.7 |
| (1,2) | 60 | 63 | 35 | 53.7 | |
| (2,3) | 20 | 40 | 55 | 38.3 | |
| (3,4) | 8 | 16 | 25 | 16.3 | |
| Picking quantity | 140 | 140 | 140 | 140 | |
| Damage quantity | 4 | 2 | 5 | 3 | |
| Fruit damage rate/% | 2.9 | 1.4 | 3.6 | 2.6 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, D.; Yang, H.; Yang, Z.; Zhang, W. Performance and Effectiveness of the Passive-Compliant Citrus-Picking Manipulator. Appl. Sci. 2025, 15, 3667. https://doi.org/10.3390/app15073667
Zhang D, Yang H, Yang Z, Zhang W. Performance and Effectiveness of the Passive-Compliant Citrus-Picking Manipulator. Applied Sciences. 2025; 15(7):3667. https://doi.org/10.3390/app15073667
Chicago/Turabian StyleZhang, Daode, Haibing Yang, Zhiyong Yang, and Wei Zhang. 2025. "Performance and Effectiveness of the Passive-Compliant Citrus-Picking Manipulator" Applied Sciences 15, no. 7: 3667. https://doi.org/10.3390/app15073667
APA StyleZhang, D., Yang, H., Yang, Z., & Zhang, W. (2025). Performance and Effectiveness of the Passive-Compliant Citrus-Picking Manipulator. Applied Sciences, 15(7), 3667. https://doi.org/10.3390/app15073667