

A Vehicle Conflict Risk Identification Method Based on an Improved Intelligent Driver Model


Abstract
1. Introduction
2. Methodology
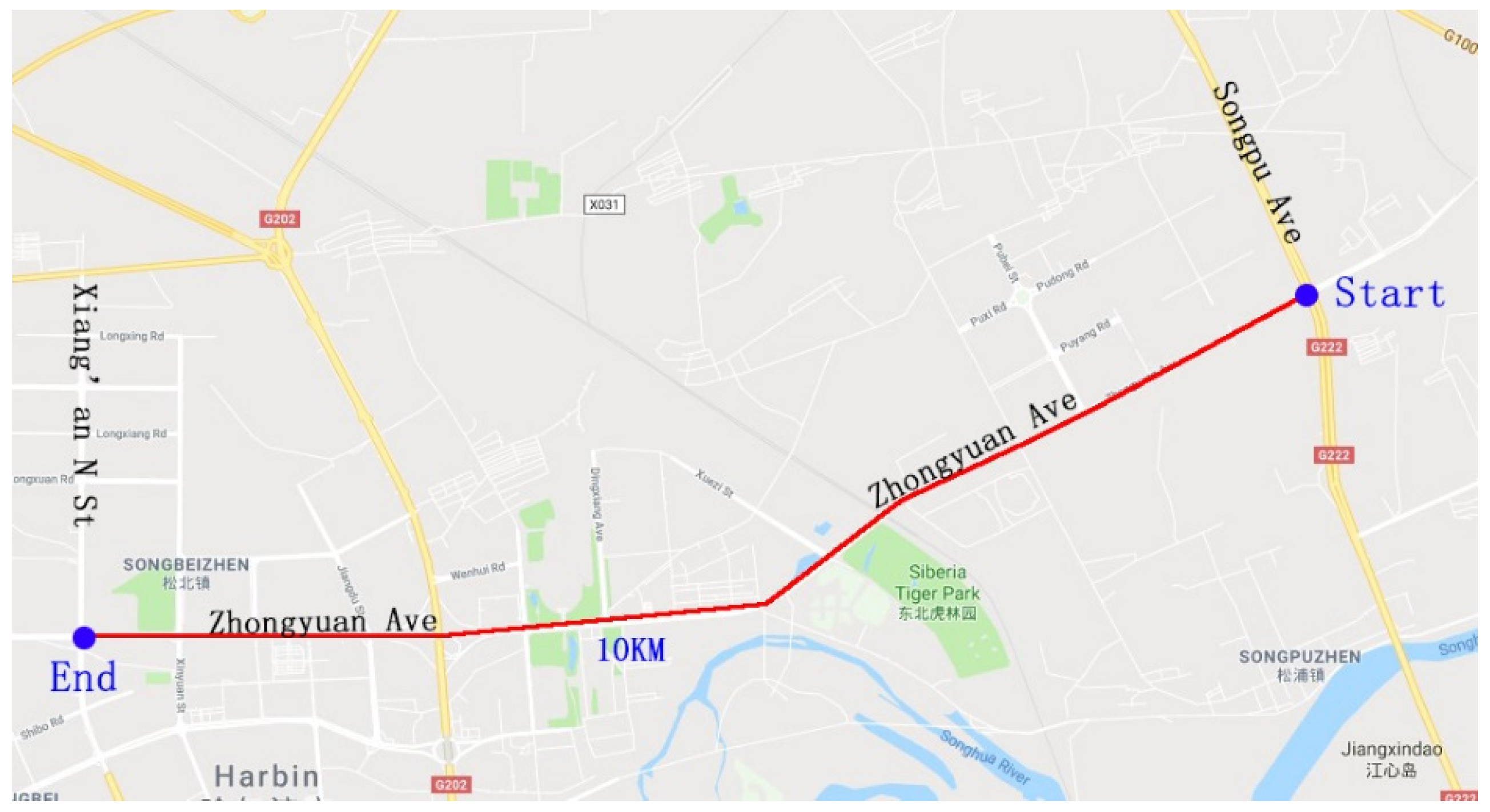
2.1. Experimental Road Sections
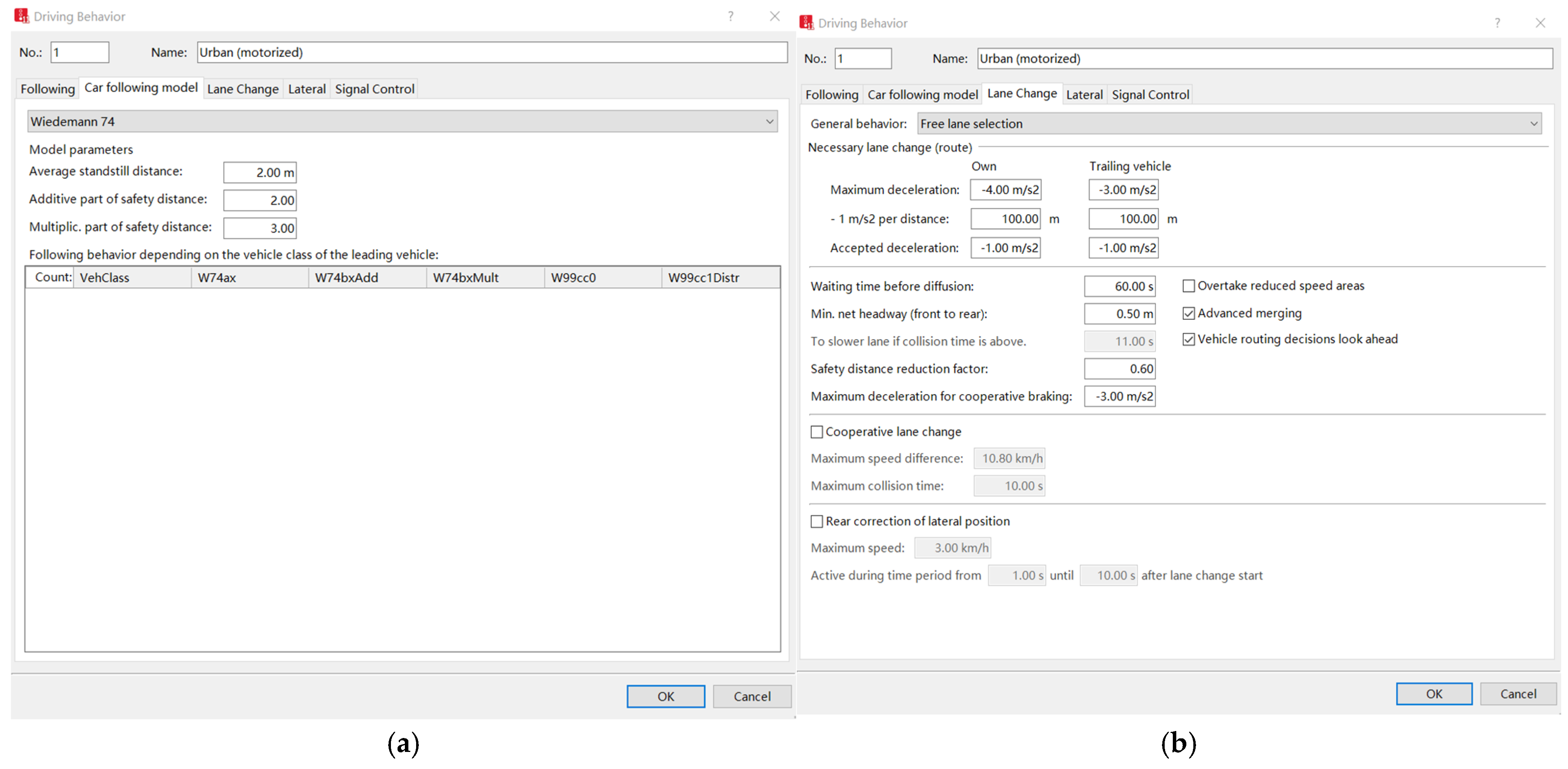
2.2. VISSIM Scenario Development
2.3. Improved Intelligent Driver Model
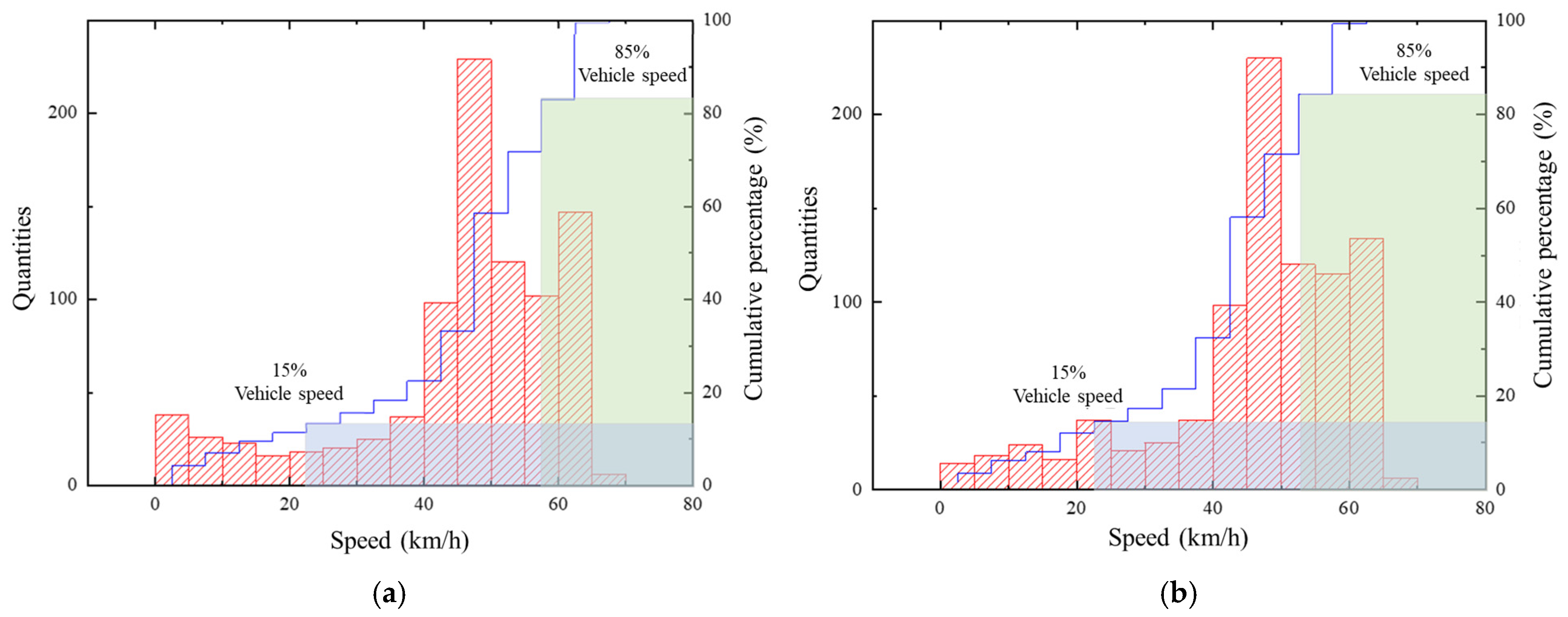
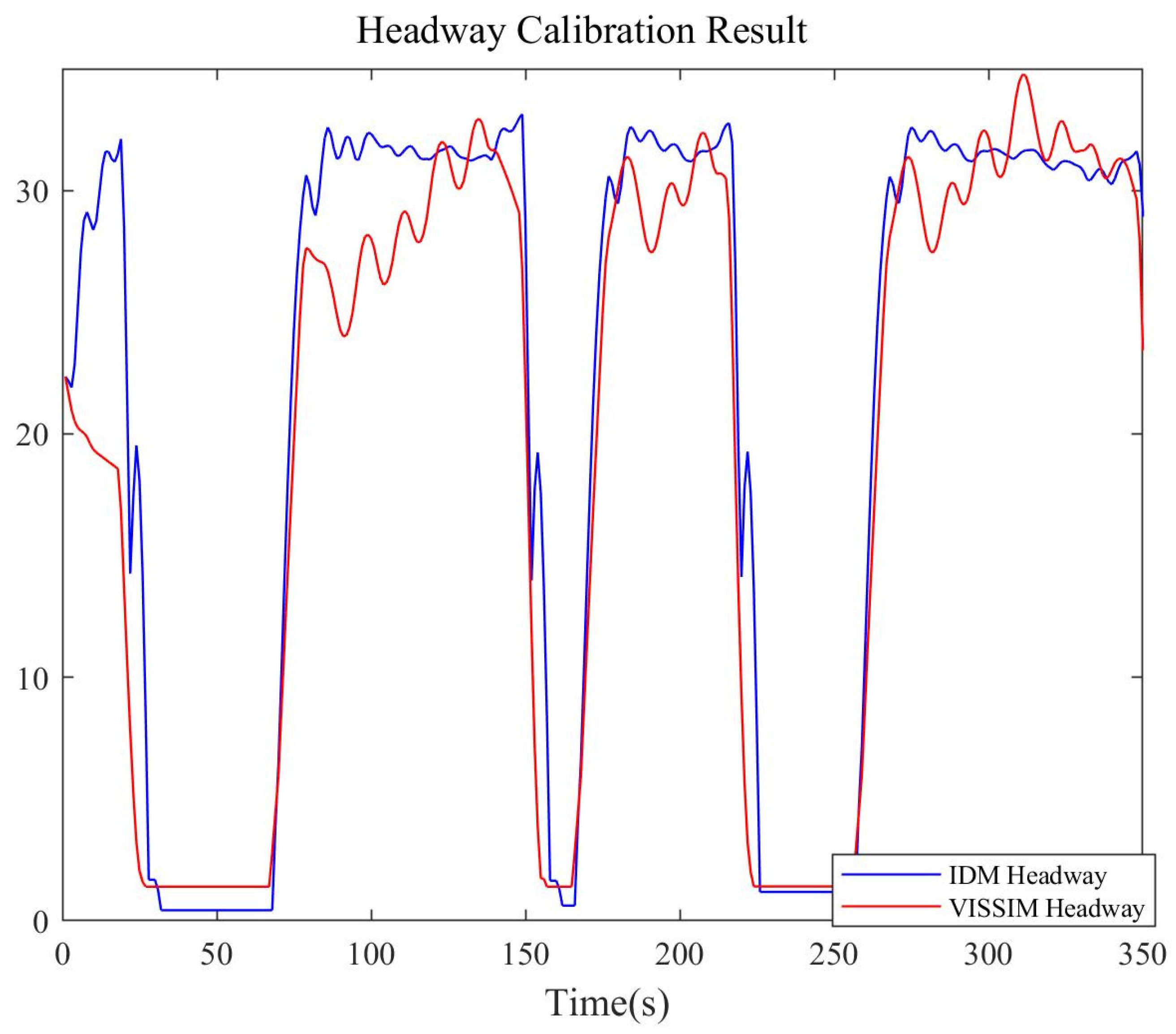
3. Result
4. Discussion
4.1. Enhancement of Model Realism and Robustness
4.2. Integration with Intelligent Systems
4.3. Adaptation to Diverse Traffic Environments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Urban Population (% of Total Population). Available online: https://data.worldbank.org.cn/indicator/SP.URB.TOTL.IN.ZS (accessed on 5 February 2025).
- Matin, A.; Dia, H. Impacts of connected and automated vehicles on road safety and efficiency: A systematic literature review. IEEE Trans. Intell. Transp. Syst. 2022, 24, 2705–2736. [Google Scholar] [CrossRef]
- Treiber, M.; Kesting, A. Traffic flow dynamics. In Traffic Flow Dynamics: Data, Models and Simulation; Springer: Berlin/Heidelberg, Germany, 2013; Volume 227, p. 228. [Google Scholar]
- Chen, Y.; Zhao, Y.; Wu, Y. Recent progress in air traffic flow management: A review. J. Air Transp. Manag. 2024, 116, 102573. [Google Scholar] [CrossRef]
- Global Status Report on Road Safety 2023. Available online: https://www.who.int/teams/social-determinants-of-health/safety-and-mobility/global-status-report-on-road-safety-2023 (accessed on 5 February 2025).
- Early Estimate of Motor Vehicle Traffic Fatalities in 2023. Available online: https://crashstats.nhtsa.dot.gov/Api/Public/ViewPublication/813561 (accessed on 25 February 2025).
- China Statistical Yearbook 2024. Available online: https://www.stats.gov.cn/sj/ndsj/2024/indexch.htm (accessed on 5 February 2025).
- Zou, X.; Vu, H.L.; Huang, H. Fifty years of accident analysis & prevention: A bibliometric and scientometric overview. Accid. Anal. Prev. 2020, 144, 105568. [Google Scholar] [PubMed]
- Koo, J.; Kim, S.; Kim, H.; Kim, Y.-H.; Yoon, E.S. A systematic approach towards accident analysis and prevention. Korean J. Chem. Eng. 2009, 26, 1476–1483. [Google Scholar] [CrossRef]
- Rahman, R.; Hasan, S.; Zaki, M.H. Towards reducing the number of crashes during hurricane evacuation: Assessing the potential safety impact of adaptive cruise control systems. Transp. Res. Part C Emerg. Technol. 2021, 128, 103188. [Google Scholar] [CrossRef]
- Gettman, D.; Pu, L.; Sayed, T.; Shelby, S.G.; Energy, S. Surrogate Safety Assessment Model and Validation; Turner-Fairbank Highway Research Center: McLean, VA, USA, 2008.
- Zheng, L.; Ismail, K.; Meng, X. Traffic conflict techniques for road safety analysis: Open questions and some insights. Can. J. Civ. Eng. 2014, 41, 633–641. [Google Scholar] [CrossRef]
- Treiber, M.; Kesting, A. Evidence of convective instability in congested traffic flow: A systematic empirical and theoretical investigation. Procedia-Soc. Behav. Sci. 2011, 17, 683–701. [Google Scholar] [CrossRef]
- Hussain, M.S.; Bahrha, G.; Goswami, A.K. An integrated VISSIM-SSAM approach to predicting and mitigating pedestrian crashes and severity along urban crossings. Case Stud. Transp. Policy 2024, 15, 101153. [Google Scholar] [CrossRef]
- Shin, S.; Cho, Y.; Lee, S.; Park, J. Assessing Traffic-Flow Safety at Various Levels of Autonomous-Vehicle Market Penetration. Appl. Sci. 2024, 14, 5453. [Google Scholar] [CrossRef]
- Liu, C.; Zhang, C.; Wang, B.; Tang, Z.; Xie, Z. Digital twin of highway entrances and exits: A traffic risk identification method. IEEE J. Radio Freq. Identif. 2022, 6, 934–937. [Google Scholar] [CrossRef]
- Zhang, X. Research on Traffic Conflict Prediction and Safety Assessment Method in Merging Area of Expressway Interchange. Master’s Thesis, Chang’an University, Xi’an, China, 2021. [Google Scholar]
- Hu, Y.; Li, Y.; Huang, H.; Lee, J.; Yuan, C.; Zou, G. A high-resolution trajectory data driven method for real-time evaluation of traffic safety. Accid. Anal. Prev. 2022, 165, 106503. [Google Scholar] [CrossRef]
- Yuan, C.; Li, Y.; Huang, H.; Wang, S.; Sun, Z.; Li, Y. Using traffic flow characteristics to predict real-time conflict risk: A novel method for trajectory data analysis. Anal. Methods Accid. Res. 2022, 35, 100217. [Google Scholar] [CrossRef]
- Raju, N.; Kumar, P.; Chepuri, A.; Arkatkar, S.S.; Joshi, G. Calibration of vehicle following models using trajectory data under heterogeneous traffic conditions. In Proceedings of the 96th Annual Transportation Research Board, Washington, DC, USA, 8–12 January 2017. [Google Scholar]
- Nishinari, K. Traffic flow dynamics: Data, models and simulation. Phys. Today 2014, 67, 54. [Google Scholar] [CrossRef]
- Sadeq, A. Machine Learning Mastery for Engineers; Kindle Direct Publishing: Qatar, Doha, 2024. [Google Scholar]
- Hussain, F.; Ali, Y.; Li, Y.; Haque, M.M. A bi-level framework for real-time crash risk forecasting using artificial intelligence-based video analytics. Sci. Rep. 2024, 14, 4121. [Google Scholar] [CrossRef] [PubMed]
- Iranmanesh, M.; Seyedabrishami, S.; Moridpour, S. Identifying high crash risk segments in rural roads using ensemble decision tree-based models. Sci. Rep. 2022, 12, 20024. [Google Scholar] [CrossRef]
- Hussain, F.; Li, Y.F.; Arun, A.; Haque, M.M. A hybrid modelling framework of machine learning and extreme value theory for crash risk estimation using traffic conflicts. Anal. Methods Accid. Res. 2022, 36, 100248. [Google Scholar] [CrossRef]
- Helbing, D.; Hennecke, A.; Shvetsov, V.; Treiber, M. Micro-and macro-simulation of freeway traffic. Math. Comput. Model. 2002, 35, 517–547. [Google Scholar] [CrossRef]
- Yi, Z.-W.; Lu, W.-Q.; Xu, L.-H.; Qu, X.; Ran, B. Intelligent back-looking distance driver model and stability analysis for connected and automated vehicles. J. Cent. South Univ. 2020, 27, 3499–3512. [Google Scholar] [CrossRef]
- Alhariqi, A.; Gu, Z.; Saberi, M. Calibration of the intelligent driver model (IDM) with adaptive parameters for mixed autonomy traffic using experimental trajectory data. Transp. B Transp. Dyn. 2022, 10, 421–440. [Google Scholar] [CrossRef]
- Holley, D.; D’sa, J.; Mahjoub, H.N.; Ali, G.; Chalaki, B.; Moradi-Pari, E. MR-IDM-Merge Reactive Intelligent Driver Model: Towards Enhancing Laterally Aware Car-following Models. In Proceedings of the 2023 IEEE 26th International Conference on Intelligent Transportation Systems (ITSC), Bizkaia, Spain, 24–28 September 2023; pp. 1460–1467. [Google Scholar]
- Zhou, Z.; Li, L.; Qu, X.; Ran, B. A self-adaptive IDM car-following strategy considering asymptotic stability and damping characteristics. Phys. A Stat. Mech. Its Appl. 2024, 637, 129539. [Google Scholar] [CrossRef]
- Xiao, X.P.; Jiang, M.; Wen, J.H.; Wu, C.Z. A novel car-following model considering conditional heteroskedasticity of acceleration fluctuation and driving force. J. Intell. Fuzzy Syst. 2018, 34, 2301–2311. [Google Scholar] [CrossRef]
- Wu, F.; Zhou, Z.; Guo, Y. Hybrid-Driven Car-Following Model Based on Improved Composite Network and IDM. Arab. J. Sci. Eng. 2024, 50, 741–757. [Google Scholar] [CrossRef]
- Tanveer, H.; Mubasher, M.M.; Jaffry, S.W. Integrating human panic factor in intelligent driver model. In Proceedings of the 2020 3rd International Conference on Advancements in Computational Sciences (ICACS), Lahore, Pakistan, 17–19 February 2020; pp. 1–6. [Google Scholar]
- Sharma, A.; Pinjari, A.R.; Nirmale, S.; Sundaresan, R. A human factors-based modeling framework to mimic bus driver behavior. Transp. Res. Part C Emerg. Technol. 2025, 170, 104929. [Google Scholar] [CrossRef]
- Abou-Senna, H.; Radwan, E.; Westerlund, K.; Cooper, C.D. Using a traffic simulation model (VISSIM) with an emissions model (MOVES) to predict emissions from vehicles on a limited-access highway. J. Air Waste Manag. Assoc. 2013, 63, 819–831. [Google Scholar] [CrossRef]
- Xiong, B.-K.; Jiang, R.; Tian, J.-F. Improving two-dimensional intelligent driver models to overcome overly high deceleration in car-following. Phys. A Stat. Mech. its Appl. 2019, 534, 122313. [Google Scholar] [CrossRef]
- Derbel, O.; Peter, T.; Zebiri, H.; Mourllion, B.; Basset, M. Modified Intelligent Driver Model for driver safety and traffic stability improvement. In Proceedings of the 7th IFAC Symposium on Advances in Automotive Control, National Olympics Memorial Youth Center, Tokyo, Japan, 4–7 September 2013. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Improvement Dimension | Reference | Year | Core Methods |
|---|---|---|---|
| Environmental Adaptability Optimization | Yi et al. [27] | 2020 | Proposed the back-looking distance driver model, which integrates a backward-looking distance optimization module with linear stability theory to enhance the stability of homogeneous CAV queues. |
| Alhariqi et al. [28] | 2022 | Developed adaptive IDMs that dynamically adjust parameters based on real-time traffic conditions. | |
| Holley et al. [29] | 2023 | Introduced the concept of maximum deceleration competition between main lane and converging vehicles into IDM. | |
| Vehicle Performance Coupling Modeling | Zhou et al. [30] | 2024 | Optimized queue cooperative control by dynamically correcting IDM acceleration function based on front vehicle speed and time. |
| Xiao et al. [31] | 2018 | Coupled the IDM with a generalized autoregressive conditional heteroskedasticity model to predict sudden changes in acceleration associated with risky driving behavior. | |
| Wu et al. [32] | 2024 | Utilized residual dense networks to extract driving state features and made collaborative decisions with IDM through optimal weight assignment. | |
| Driver Behavior Integration | Tanveer et al. [33] | 2020 | Quantified the nonlinear inhibitory effect of psychological stress on acceleration by embedding panic level coefficients into IDM safety distance calculations. |
| Sharma et al. [34] | 2025 | Introduced a multi-target prognostic logic and a stimulus perception parameter calibration mechanism into IDM to account for bus driver driving characteristics. |
| Driving Behavior | Parameters to Be Calibrated Parameter Name | Parameter Threshold |
|---|---|---|
| Follow-up model | Average parking distance/m | 0.5–3 |
| Time headway/s | 0.3–2 | |
| Follow-up variables | 2–7 | |
| Aggressive following threshold | 2.5–5 | |
| Passive following threshold | −5–5 | |
| Acceleration/(m/s2) | 1–5 | |
| Vehicle lane-change behavior | Acceptable deceleration/(m/s2) | −4–−0.5 |
| Minimum headway/m | 0.1–1 | |
| Safety distance reduction factor | 0.1–1 | |
| Maximum deceleration of coordinated braking/(m/s2) | −5–−2 |
| Parameter | Value | Unit |
|---|---|---|
| a | 2 | m/s2 |
| b | 1.4 | m/s2 |
| s0 | 1.5 | m |
| T | 1.2 | s |
| V0 | 70 | km/h |
| 3 | — |
| Risk Level | Indicator | |
|---|---|---|
| TTC (s) | ITTC (1/s) | |
| Potential conflict risk (PC) | >4 | <0.25 |
| General conflict risk (GC) | [2.1, 4] | [0.25, 0.48] |
| Serious conflict risk (SC) | <2.1 | >0.48 |
| Conflict Level | Conflict Situation | ||
|---|---|---|---|
| Actual Sample | Indicator Sample | Accuracy Rate | |
| Potential conflict risk (PC) | 26,161 | 27,138 | 96.63% |
| General conflict risk (GC) | 17,997 | 17,587 | 97.72% |
| Serious conflict risk (SC) | 7778 | 7211 | 92.71% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qi, S.; Zheng, A. A Vehicle Conflict Risk Identification Method Based on an Improved Intelligent Driver Model. Appl. Sci. 2025, 15, 3240. https://doi.org/10.3390/app15063240
Qi S, Zheng A. A Vehicle Conflict Risk Identification Method Based on an Improved Intelligent Driver Model. Applied Sciences. 2025; 15(6):3240. https://doi.org/10.3390/app15063240
Chicago/Turabian StyleQi, Shouming, and Ao Zheng. 2025. "A Vehicle Conflict Risk Identification Method Based on an Improved Intelligent Driver Model" Applied Sciences 15, no. 6: 3240. https://doi.org/10.3390/app15063240
APA StyleQi, S., & Zheng, A. (2025). A Vehicle Conflict Risk Identification Method Based on an Improved Intelligent Driver Model. Applied Sciences, 15(6), 3240. https://doi.org/10.3390/app15063240