1. Introduction
Remote driving (RD), i.e., the control of road vehicles at a distance, is an emerging transportation technology often associated with potential ethical benefits, particularly when deployed to tackle urban traffic issues. However, prospected benefits could only be reaped if RD can be executed in a safe and responsible way.
In line with these considerations, the present article aims at investigating how to design RD systems—and, in particular, Human–Machine Interfaces (HMIs)—that put Remote Operators (ROs) in the best conditions to drive responsibly. More specifically, it elaborates and adopts a novel methodological framework inspired by the philosophical literature on technological mediation to discuss current and emerging visual, auditory, and haptic interfaces with the intention of clarifying their impacts on responsible RD and setting the stage for future empirical research and experimental studies.
By combining insights from engineering, interaction studies, and philosophy, this research offers a multidisciplinary perspective on RD systems that puts responsibility at its very core and reflects on how its exercise is influenced by technology design. The analysis intends to contribute to shedding light on the limitations that remote control technologies might impose on the exercise of responsible driving while also highlighting the opportunities to support it and, thus, to create the conditions for safer urban traffic.
While it builds on the literature on RD and HMI, this research exhibits three main elements of novelty. First, it introduces the notion of responsible RD and, in so doing, it brings into focus a relevant but arguably under researched ethical issue. Secondly, it explores a new multidisciplinary approach to enrich the understanding of the relation between RD, HMI, and Remote Operators’ (ROs) responsibility. Finally, it sketches and applies a novel systematic methodology to evaluate the effectiveness of HMI setups and inspire future empirical research on the subject.
The paper is structured as follows.
Section 2 briefly introduces RD systems from a technical point of view, reviews its prospected benefits, and justifies the choice of focusing on urban contexts of use.
Section 3 zooms in on the importance of responsibility as a key enabler of possible ethical benefits. Building on the methodological framework of technological mediation, it claims that interfaces play a pivotal role in co-shaping the exercise of responsibility in RD, i.e., in structuring ROs’ perception of driving situations, decision-making processes, and vehicle control. Therefore, interface design is identified as the major issue to be addressed.
Section 4 adopts the mentioned methodology to discuss current and emerging HMIs and shows their respective potential in supporting responsible RD. More specifically, three macro-categories of HMIs are examined according to the kind of information they mediate: visual information (
Section 4.1), auditory information (
Section 4.2), and information concerning physical forces (
Section 4.3).
Section 5 concludes the analysis by stressing the importance for responsible RD of multi-sensory interface design and future empirical research.
2. Remote Driving and Urban Mobility
As a preliminary step towards the discussion of interface design and responsible RD, let us first briefly introduce RD technologies and the motivations behind their current study and development. (For more detailed information about the developmental trajectory of RD technology, technical requirements, and implementation challenges, cf. [
1,
2]).
Remote driving—sometimes, teledriving—technologies are systems that enable human operators to exert different degrees of control on vehicle behavior at a distance. In a wider sense, the term applies to a variety of use contexts and vehicles, spanning from utility vehicles in industrial settings (e.g., mining, warehousing [
3]) and ground/aerial/(sub)marine vehicles in military operations [
4,
5] to emergency vehicles in search and rescue operations [
6] and so on.
In particular, RD is commonly used to refer to civil applications involving the control of road vehicles at a distance [
1,
7]. For instance, current research is intensely exploring RD solutions to support car-sharing services in urban environments. Companies such as Vay, Halo, and Elmo (cf.
Table 1) have been working to include RD in car-sharing business models, so to deliver cars directly to the customers’ locations and taking back vehicle control after customer use, thus removing the nuisance of finding a parking spot and maximizing fleet use. The present research centers on this last use case.
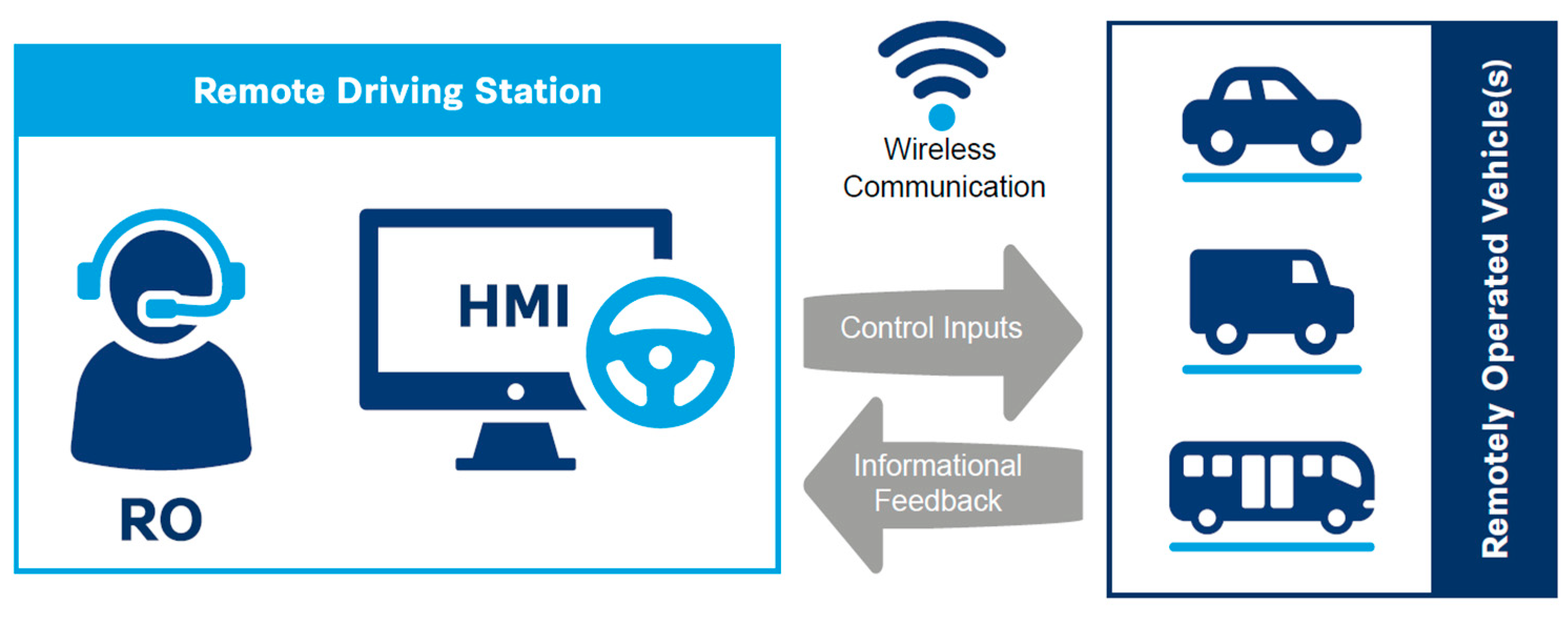
Even though different use contexts pose varying needs and technological requirements, some general features apply transversally to RD applications. As
Figure 1 schematically shows, a typical architecture could be said to display at least the following key components [
1,
4,
8]:
A remote driving station with HMIs allowing ROs to issue control inputs to remotely operated vehicles and obtain informational feedback about vehicle surroundings, status, and driving tasks.
A wireless communication system, either pre-existent or ad hoc, ensuring that data are transmitted quickly and reliably between remote driving stations and remotely operated vehicles.
A remotely operated vehicle (or more) endowed with sensor technologies for gathering data to be sent to remote driving stations and actuators for executing control inputs issued by ROs.
Figure 1.
Outline of a typical remote driving system architecture.
Figure 1.
Outline of a typical remote driving system architecture.
In addition to a variety of use contexts, RD also comes in different modes. Even though the definition provided by UNECE [
9] focuses on “the real-time execution of all dynamic driving tasks (DDTs) and/or fallback DDT (including braking, steering, acceleration, and transmission shifting in real-time), by a remote driver”, the literature on the topic admits of more forms, which are usually characterized by reference to the level of automation with which the vehicle is endowed. Indeed, RD is often considered first and foremost as a backup technology enabling driving automation, i.e., offering support when automated driving systems are unable to perform as expected [
10,
11]. With driving automation itself being a matter of degrees, as per the SAE J3016 Levels of Driving Automation [
12], ROs’ forms and degrees of involvement in the management of DDTs are bound to vary accordingly.
In this sense, and even though the terminology changes between scholars [
1,
2,
12,
13,
14,
15,
16], three main modalities of remote control have emerged:
Remote driving: direct control at a distance of DDTs with vehicles equipped with no automation (L0), driver assistance (L1), or partial automation (L2) systems.
Remote assistance: while vehicles endowed with conditional (L3) or high (L4) levels of automation manage all DDTs, ROs are expected to supervise driving system performances and take control if necessary—either spontaneously or upon notification, either directly (L3) or issuing driving commands, providing instructions, and authorizing maneuvers that systems execute (L4).
Remote monitoring: while fully automated vehicles manage all DDTs in all traffic scenarios (L5), ROs monitor driving systems performances, are notified of problems, provide instructions, authorize plans of action, and issue commands such as new routes or missions but have no control over DDTs.
Even though some system configurations might present hybrid forms of remote control integrating elements of the three categories just described, the classification is useful to shed light on the main roles played by Ros, which, as we stress in the next section, is critical to determine the related responsibilities.
In addition to industrial, commercial, and financial goals—and similarly to the case of driving automation [
17]—the development of RD technologies has also been associated with envisaged ethical improvements to the transportation sector broadly construed. In particular, remotely operated shared vehicles are prospected as a potentially effective tool to manage many ethical issues that are currently troubling urban mobility, spanning from unsatisfactory levels of traffic safety, inefficient use of road infrastructure, and limits to public transport accessibility to air pollution and car-centric land use—all issues bound to worsen in the future due to fast urbanization [
18,
19,
20]. Many of these problems have been acknowledged internationally, and their mitigation has been included in the UN Sustainable Development Goals framework within the Goal 11, “Sustainable Cities and Communities”, the Target 2 of which is specifically dedicated to
Sustainable Transport (
https://sdgs.un.org/topics/sustainable-transport, accessed on 24 February 2025) and aims at providing “access to safe, affordable, accessible and sustainable transport systems for all, improving road safety, notably by expanding public transport” (
https://sdgs.un.org/goals/goal11#targets_and_indicators, accessed on 24 February 2025).
The ethical potential associated with RD mainly rests on the chance to reduce—better, optimize—car usage in cities, furthering expectations already attached to car-sharing services [
21,
22]. Excessive car usage in urban areas lies at the root of a variety of severe social issues, such as traffic congestion prolonging commute times and causing stress for residents and road users or air pollution negatively impacting on public health. Moreover, disparities in car ownership create inequities in transportation access, affecting job opportunities and social mobility. Furthermore, the need of on-road parking places for increasingly larger vehicles—linked with a highly inefficient use of both road vehicles and public land—reduces green spaces and amenities for citizens, negatively affecting the quality of urban landscapes, city microclimate, neighborhood livability, and citizen well-being [
23].
A substantial uptake of remotely operated car-sharing services might lower the number of vehicles driving through the city, optimizing traffic flows and, thus, leading to a reduction in traffic-related stress and air pollution [
22]. Importantly, RD could also massively reduce the need for on-road parking spots and private car infrastructure, thus allowing for substantial redistributions of urban spaces to be repurposed into green areas and places for social activities, thus contributing to creating more welcoming and livable cities for everyone [
24]. More urban space could also be dedicated to infrastructure for public transport or healthier, safer, and greener transport modes such as walking and cycling, which are commonly associated with ethically positive effects. Moreover, remotely operated car-sharing services—if financially accessible or properly subsidized—might help cope with the last mile problem and, thus, extend the accessibility of public transport options to poorly connected neighborhoods better than regular car-sharing services, since the availability of free vehicles could be sparse in given areas.
If the potential benefits of RD are broad and promising, it is to be noted that their enjoyment entirely depends on its safe execution [
25]. Rightly so, safety occupies a primary role in transportation ethics [
26,
27]. Low-safety road transport technologies, even though otherwise beneficial, would hardly be justifiable. The inability to control vehicles safely would irreparably compromise the benefits listed above. This is particularly true for urban environments, where the road is shared with a plethora of vulnerable users (pedestrians, bicyclists, motorcyclists, e-scooter users, and so on). Hence, safety is a necessary condition for any RD application. And insofar as safe driving significantly depends on the exercise of responsibility behind the wheel, it becomes necessary to clarify how its technological mediation impacts on the operators’ capability of exercising responsibility behind the remote wheel. The next section tackles this issue by focusing the attention on the crucial relation between RD safety, responsibility, and interface design.
3. Responsible Remote Driving
Responsible driving is widely acknowledged as a critical ingredient of road safety and lies at the heart of both educational programs and awareness campaigns. Moreover, failings to drive in responsible ways are commonly prosecuted by law enforcement. Even though more recent research on road safety is shifting the attention from driving behavior to infrastructure and vehicle design, the task of putting drivers in the best possible conditions to exercise responsibility remains fundamental [
28].
Obviously, current concepts of safe and responsible driving are built around its most common configuration—the one where drivers control the vehicles inside of which they sit. Moving drivers away from the vehicles they are controlling, as in RD, is bound to impact considerably on the conditions and forms of responsible driving. This section aims at sketching a preliminary analysis of this transformation to stress the importance of HMI design for the exercise of responsible RD.
Researchers in philosophy of technology have long insisted on the importance of looking into how technological artefacts mediate human experiences (e.g., [
29,
30,
31,
32,
33]). When human perceptions and actions occur through or with technological artefacts, scholars suggest, it is important to determine how their mediating role impacts on, transforms, or co-shapes the related experiences. To inquire into instances of technological mediation, then, a framework has been proposed that, essentially, revolves around the basic structure of amplification and reduction. In a nutshell, it is argued that technological mediation co-shapes human experiences by making some of its aspects easier to perceive or act upon (amplification) while making others more difficult to perceive or act upon (reduction). By comparing a technologically mediated experience with a corresponding experience where the mediation is null or less hefty, the specific co-shaping role of technology can be realized, and its overall impact on the experience evaluated. RD lends itself well to be discussed in these terms. A comparison with regular driving helps realize how RD technology mediates/transforms/co-shapes responsible driving and what role HMIs play in amplifying or reducing its exercise (For analogous applications of the same philosophical perspective to problems related to interfaces and human–computer interaction, see, e.g., [
34,
35,
36]).
In regular driving, drivers enjoy a rather direct access to road environmental information. By looking through an unobstructed field of vision provided by the windshield, windows, and rear-view mirrors, drivers keep their eyes on the road to acknowledge the presence of obstacles and properly handle interactions with other road users, while also gathering various safety-critical vehicle information shown on dashboards and displays. By listening to sounds coming from the road environment and the vehicle itself, they catch important cues supporting responsible driving such as sirens, honks, shouts, and other noises. By feeling the forces and vibrations conveyed by the vehicle rolling on the street, they keep track of safety-critical information about speed, orientation in space, road conditions, and so on.
Each of these perceptions is relevant to the exercise of responsible driving as we know it. Driving safely and responsibly, then, importantly depends on enjoying a continuous, integrated, and meaningful access to this complex flow of information, which is commonly known as maintaining Situation Awareness (SA). In general terms, SA can be defined as “the real-world changing knowledge that is critical for effective decision making and action” [
13] (p. 14), [
37]. In traffic psychology, the notion basically denotes a driver’s perception and understanding of the dynamic coupling between the controlled vehicle and its environment on which to base the prediction of future events and, thus, decision-making [
16,
38]. Due to the limitations it entails on the proper exercise of responsibility (and, in turn, the respect of safety), any behavior, e.g., drunk driving, texting, distractions, or psychological factor, e.g., stress, road rage, drowsiness, that impacts negatively on SA is to be avoided and often punishable by law.
Let us now consider the case of RD. Here, access to responsibility-critical road environmental information cannot be taken for granted or demanded to each individual’s fitness to drive (be it physiological or psychological). Being separated from the environment where the vehicle operates, drivers’ access to relevant information must be mediated through dedicated technological solutions, i.e., HMIs. Even if a RO is perfectly fit to drive, then its capability to rely on road environmental information necessary for driving responsibly depends crucially on the capacity of the technological system to provide this information in an accurate, complete, clear, easy-to-interpret, and manageable way. In other words, the possibility for ROs to gain and maintain SA importantly rests on the mediating function of interfaces. And being the number, kinds, specifics, and interconnection modes of interfaces to be adopted a matter of choice, HMI design acquires great relevance to enable responsible RD.
Realizing the role of HMI design is helpful to shed light on the relation between SA and responsibility. Arguably, SA is not valuable in itself. On the contrary, it is valuable only as a condition to—or, better, an enabler of—responsible driving. In the case of RD, where SA must be built from scratch by design, its instrumental relation to responsibility is noteworthy. If technological mediation exhibits an amplification/reduction structure, as scholars claim, determining which (sets of) interfaces generate the right degree of SA clearly requires a final objective against which to evaluate their rightness. Establishing responsibility as the final objective served by SA might help assess competing design alternatives.
By suggesting that RD interfaces co-shape ROs’ behavior, the amplification/reduction structure offers an insightful perspective from which to inquire into the relation between SA, HMI design, and responsible RD. Many questions arise along this line of research. Which perceptual elements are amplified by a given interface, and which are reduced? How can interface designers take advantage of the opportunities involved in the amplifying effect of mediation while minimizing the risks posed by related reductions? How can SA be supported by providing information in a mediated way without overwhelming ROs’ cognitive capabilities?
The problems reviewed so far are particularly troubling in the case of ROs directly controlling car-sharing vehicles deployed in urban areas. Urban road environments are informationally complex, chaotic, and noisy. Any shortcoming in SA mediation is bound to reverberate significantly on the exercise of responsible RD. Given, moreover, that the urban space is shared with vulnerable road users, the ensuing safety issues are significant. In addition, it is to be noted that ROs’ responsibilities also depend on the form of remote control they exercise. Compared to RD, where ROs retain full responsibility for all DDTs, ROs’ responsibilities in the cases of assistance and monitoring are more limited [
39]. By opting for RD in urban areas as a use case—the most problematic configuration in terms of safety—we intend to concentrate on the situation in which relevant responsibility issues are more visible and, hopefully, more easily detectable.
The fact that the present analysis focuses on HMI design is not meant to suggest that this is the only dimension that needs to be considered. Indeed, further technical aspects also have substantial impacts on responsible RD. For example, network requirements ensuring that data is transmitted in a fast, reliable way are of utmost importance. Latency issues would not only disentangle ROs and vehicles, but they could also risk desynchronizing the various feedback flows reaching ROs, thus breaking the unity of the remote experience and making it unintelligible or highly increasing ROs’ cognitive load. For a general overview of technical challenges which, however, cannot be addressed here, cf., e.g., [
1,
2].
Building on what discussed so far, the rest of the paper provides an analysis of RD interfaces aimed at evaluating their impacts on ROs’ exercise of responsibility. Drawing on the amplification/reduction structure characterizing technological mediation, both weaknesses and strengths proper of each HMI kind are identified and discussed. In doing so, we intend to raise awareness on how interface design mediates responsible RD. Moreover, we aim to provide some initial suggestions on what is required or preferable to foster its exercise by design, which we hope might insightfully inform future empirical research.
4. Interface Design Analysis
Compared to regular driving, controlling vehicles remotely through the mediation of HMIs transforms the perception of the road environment. These transformations impact on responsible driving in ways that are important to realize from a design perspective. While some perceptive limitations and hurdles are bound to emerge, in fact, opportunities to foster responsibility that are unavailable in the case of regular driving might also surface. To measure the extent of these transformations and their impacts on ROs’ responsibility, it is crucial to understand how driving is mediated through HMIs, i.e., to clarify which aspects are amplified and which are reduced.
This section zooms in on HMIs to evaluate the peculiar ways in which they mediate the RD experience. More specifically, it provides an analysis of opportunities and pitfalls with reference to RO’s exercise of responsibility, which has not been a primary research focus so far. It does so in a preliminary way by discussing empirical evidence on RD HMIs presented in the literature through the methodological lenses of technological mediation. To better clarify how our research maps onto existing experimental research, a table of the empirical studies on which our analysis is based has been added to the present work as
Appendix A. The results of this preliminary analysis, we hope, will contribute to inspiring future empirical research on responsible RD.
Before starting the investigation, it is useful to introduce the main challenges that characterize RD HMI design in urban environments. As already noted, urban road environments are informationally complex, noisy, and chaotic. Promptly obtaining and maintaining SA is therefore a cognitively demanding but critical condition to safe and responsible RD—a condition that can only be satisfied through design. While the possibility of controlling vehicles is amplified through space, the associated possibility of accessing road environmental information is reduced and, thus, needs to be regained by means of HMI design.
The technological mediation extending ROs’ perception on to the road environment also presents its own amplifications and reductions. In this sense, the kinds and blends of information that HMIs mediate must be carefully balanced by design so to allow ROs to promptly process it without either lacking relevant pieces or being cognitively overwhelmed. RD HMI design, then, aims at striking the right balance to communicate the necessary information without overloading ROs’ cognitive capabilities [
4,
7].
Responsible RD, therefore, massively depends on the modes of its technological mediation. The analysis we propose aims at clarifying their significance and impact. Three macro-categories of informational feedback needed to obtain and maintain SA have been identified, corresponding to the human senses involved in the driving experience: sight, hearing, and touch. Accordingly, the investigation focuses on assessing how video, audio, and haptic feedback are conveyed.
As
Figure 2 schematically indicates, video feedback (
Section 4.1) is mostly conveyed through monitors (
Section 4.1.1) and sometimes enhanced with augmented reality features (
Section 4.1.2), but innovative solutions such as head-mounted displays will also be considered (
Section 4.1.3). Audio feedback (
Section 4.2) is usually conveyed through headphones and microphones. Finally, HMIs for haptic feedback (
Section 4.3) usually include steering wheels and pedals (
Section 4.3.1), while research on seats, haptic displays, and wearables (
Section 4.3.2) is still in its infancy. The following pages discuss the extent to which these interfaces contribute to making RD tasks less demanding, reducing workloads, enhancing safety, and putting ROs in the best conditions to exercise responsibility. For each coupling of sense and feedback, the investigation examines the essential information required for responsible driving, the ways in which the information is conveyed through the HMIs under discussion and, finally, the related limitations and opportunities.
4.1. Sight: Video Feedback
The crucial importance of sight as a condition to safe and responsible driving is evident. While good eyesight is required to be declared fit to drive regular vehicles, it is also necessary to provide drivers with an adequate and unobstructed Field of Vision (FOV) through the windshield and side windows, which e.g., regulation in Europe sets as spanning at least 180 degrees horizontally (cf., e.g., [
40]). Front and lateral visibility must also be completed by rear visibility through rear-view mirrors.
While good eyesight is bound to remain crucial to be declared fit to drive remotely, FOV requirements are to be entirely translated into HMI requirements. Indeed, the possibility of seeing the road environment directly is transformed to the point that every piece of visual information must now be mediated through interfaces–usually, monitors reproducing video feeds incoming from vehicle cameras. Video feedback evidently holds great importance in RD, providing ROs with essential information to navigate urban environments safely and responsibly.
Unsurprisingly, this kind of feedback constitutes a necessary condition to RD. The varying ways in which visual information is conveyed to ROs, however, diversely influence their ability to drive responsibly. The main challenge in the technological mediation of visual information, then, is to design HMIs displaying video feed in ways that are conducive to responsible RD. The following subsections take a closer look at how visual HMIs such as monitors (
Section 4.1.1), augmented reality solutions (
Section 4.1.2), and head-mounted displays (
Section 4.1.3) co-shape responsible RD by discussing the associated amplifications and reductions.
4.1.1. Monitors
The real-time footage captured by cameras and communicated to the control station is usually displayed on monitor setups varying in number, kind, size, and resolution. Traditional LCD screens are commonly used due to their affordability, reliability, and availability in various sizes and resolutions. However, the compression of video feeds on monitors that are not wide enough might result in geometric distortions [
16,
41]. To cope with this issue, configurations combining three (or more) monitors, as shown, e.g., in
Figure 3, are widespread, offering an affordable solution to ensure a FOV up to 180 degrees without the need to compress the video information. However, it is fundamental to position the screens without gaps and with a correct FOV calculation, as an incorrect setting might negatively affect ROs’ driving performance.
Curved ultra-wide screen panels are also becoming increasingly popular. Offering a FOV akin to the regular one, these screens allow visual information displayed at sides to maintain a consistent distance from the ROs’ eyes compared to the center of the screen, which is not always the case with multiple screens, while also minimizing visual artefacts such as glares or image distortions and calibrating performances to offer realistic feedback. However, a single curved monitor currently costs significantly more than a three-screen configuration providing the same FOV. Moreover, when video feeds incoming from different camera sensors are to be displayed on one single curve screen, high-quality video stitching—a rather expensive technique—becomes necessary to provide a comprehensive view of the surroundings. In fact, poor-quality stitching can increase ROs’ cognitive load, making it more challenging for them to process visual information [
7].
The mediation of visual information through monitors exhibits relevant reductions. Although it amplifies the reach of ROs’ vision, the translation of a three-dimensional environment into a two-dimensional screen also reduces many aspects of unmediated visual perception [
7,
16,
41]. For example, the sense of depth is importantly reduced. With depth perception being essential for understanding spatial relationships and making accurate driving judgments, this poses significant challenges to the exercise of responsibility. The lack of many depth cues blurs the distinction between near and far objects, potentially resulting in maneuvering and navigation difficulties. Width perception is similarly reduced, with ROs encountering difficulties in, e.g., estimating vehicle width, which complicates even ordinary maneuvers such as completing turns without bumping into obstacles or drifting into another lane. Peripheral vision—essential for safety-critical driving tasks such as lane keeping and lateral control—is also reduced. In fact, ROs tend to fix their attention on the central view and neglect information displayed on the sides (an instance of attentional tunnelling—cf. [
13], pp. 31–33), particularly in cases where side images are rendered with lower resolution than those shown in the center.
In addition to reductions in visual perception, HMI setups constituted exclusively by monitors would reduce the full-fledged sensory experience of driving to a mono-sensory experience of vision-based remote control. As mediation theory suggests, however, the elements of the driving experience that are reduced through visual HMIs do not necessarily coincide with irrelevant elements. Therefore, it is important to move beyond this interface selectivity and assess whether something important has been left out.
Indeed, the sensory reduction of sounds and physical forces here involved poses noteworthy risks in terms of responsible RD. These forms of informational feedback greatly contribute to the awareness of critical aspects of the driving experience such as speed, acceleration, braking, and centrifugal forces in turning. Moreover, mono-sensory visual HMIs might induce the impression of an overly gamified experience where ROs feel detached from reality, which might engender irresponsible behavior [
25,
42,
43]. In this sense, from a design perspective it is recommended to take into explicit account the reductions involved in mono-sensory visual HMIs.
4.1.2. Augmented Reality
To cope with reductions, the best strategy might be to build a multi-sensory (or multimodal) HMI by integrating visual feedback with other kinds of feedback, as the next subsections discuss. However, and interestingly, visual HMIs also offer a further possibility of amplifying vision by superimposing to the video feed data visualization tools aimed at translating non-visual reduced aspects into visual cues, thus minimizing the effects of the corresponding reductions and providing ROs with much needed additional context and guidance (e.g.,
Figure 4).
Similar solutions can be loosely grouped under the umbrella of augmented reality (AR; e.g., [
2,
44]). For example, a digital representation of the dashboard might help ROs obtain a clearer sense of speed and other (“invisible”) information about vehicle status along with force-related information such as acceleration and braking, for which dedicated infographics might be created. Confusion about spatial orientation could be counteracted by superimposing maps showing vehicle position and current direction of travel. Maneuvering problems caused by the reduction of width and depth perception might also be managed by superimposing visual cues. The over-impression of self-adjusting trajectories might enhance ROs’ understanding of the vehicle’s projected path and relative position with reference to obstacles. Additionally, depth perception might also be supported by integrating cues such as safe braking distance indexes or color-coded visual indicators similar to those used in rear-view cameras or in medical visualizations [
45]. Width perception can be enhanced through visual representations such as collision avoidance zones, increasing ROs’ spatial awareness and facilitating navigation through complex environments. Finally, the integration of other sensor technologies, such as LiDAR (Light Detection and Ranging), radar, and ultrasonic sensors to the system might provide supplementary data on distances, speed, and object detection, which could be translated into visual cues to further enhance ROs’ SA and decision-making capabilities [
46]. V2X connectivity might also open new amplification opportunities along the same line. Smart traffic cameras could transmit video feed to remotely operated vehicles, which, in turn, would relay it to visual HMIs and enable ROs to access visual information about incoming traffic or intersections situated beyond the FOV provided by vehicle sensors.
Managing reductions by further amplifying vision, however, represents a mono-sensory solution that runs the risk of putting an excessive burden on ROs’ perceptive and cognitive capabilities. Indeed, transmitting all information necessary to responsible RD through monitors might overload ROs’ capacity to process it properly. On the one hand, cognitive overload might be caused by cumbersome methods of data visualization. For instance, symbolizing distance from an object through superimposed digital numbers might require too much cognitive effort to be quickly translated into actionable information [
7]. However, the sheer amount of overlaid information, although easily interpretable, might lead to cognitive overload and communication failures—a problem that could be better handled through multi-sensory HMIs.
That being said, AR technology could also be applied to intelligently manage ROs’ cognitive capabilities and guide attention to salient elements displayed on monitors, thus amplifying sensitivity to salient stimuli. For example, AR tools paired with image recognition software could superimpose computer-generated imagery onto live video feeds highlighting safety-critical information about road conditions and potential hazards [
47]. However, this guided amplification of sensitivity is necessarily paired with tunnelling effects and a lower degree of attention directed to other areas of the video feedback—areas that, however, might contain equally important information to responsible driving. Even though amplifications such as those discussed in the previous lines show a clear potential for supporting responsible RD, associated reductions and cognitive overload risks call for careful design approaches.
4.1.3. Head-Mounted Displays for Virtual Reality
Although interesting, the solutions considered so far do not seem to tackle the problem of detachment due to the feeling of an overly gamified experience. In this regard, one of the most innovative strategies to boost visual immersion is the adoption of Head-Mounted Displays (HMDs) for Virtual Reality (VR).
Indeed, VR could offer a more immersive viewing experience by providing a 3D representation of vehicle surroundings with high degrees of precision, allowing operators to detect early signs of vehicle movements and anticipate road conditions with greater accuracy. Moreover, ROs’ sense of presence would be enhanced, since HMDs would offer a wide FOV allowing them to look around as if they were physically sitting in the vehicle [
46]. Offering ROs the possibility to exert some control on gaze direction might contribute to fostering safety and responsibility. A fixed viewpoint might hamper their ability to navigate effectively, especially during delicate maneuvers. In this sense, [
41] explored the option of providing adjustable cameras but noted that they should be automatically returned to their original position after each shift; otherwise, ROs might become confused about their angle. Interestingly enough, then, amplifying remote vision by allowing gaze control in this way might lead to a reduction of spatial awareness due to its characteristic lack of embodiment. Precisely because of the sense of embodiment they mediate, HMDs would arguably help manage this last shortcoming.
Research on HMDs for RD is still in its infancy, so that more studies are required to obtain a better picture of its technical feasibility, cost effectiveness, and actual impacts on driving performances. Currently, the evidence is mixed. For example, [
48,
49] suggested that while HMDs do offer enhanced immersion, they may not necessarily lead to improved driving performance. Moreover, overreliance on visual feedback seems to characterize this strategy as well, so that related reductions might not find adequate countermeasures without posing risks of cognitive overload. In addition, the reduction of other sensory channels is so significant with HDM and VR that motion sickness and nausea might arise from the uncanny perception of disassociations between visual motion and vestibular inputs. Therefore, let us now consider other sensory feedback interfaces that might help cope with the reductions proper of visual HMIs.
4.2. Hearing: Audio Feedback
In addition to good eyesight, other senses are also extremely important to drive safely and responsibly. Consider hearing. Many countries do allow people who are deaf or hard of hearing to obtain a driver’s license and operate vehicles. However, drivers with hearing impairments typically need to undergo medical evaluations to assess their ability to drive safely, which indirectly indicates that hearing plays a significant role as an enabler of safe and responsible driving (e.g., [
50]).
With reference to RD, it has been shown that mono-sensory visual interfaces amplify eyesight in multifarious ways while concurrently reducing other perceptual dimensions–hearing being one of them. While it is possible to operate remote vehicles without audio feedback, adding interfaces aimed at countering this reduction is worthwhile. Amplifying ROs’ hearing by way of technological mediation would not only extend their perceptive reach on to safety-critical aspects of the road environment but also help manage their cognitive load by easing pressure on eyesight. Indeed, audio interfaces might be specifically designed to address some of the reductions involved in video interfaces and, therefore, support ROs’ efforts to properly obtain and maintain the right degree of SA.
Complex and chaotic urban traffic environments increase the importance of auditory cues for safe and responsible RD [
7]. The background noise of urban streets is replete with crucial information aiding drivers in making sense of traffic situations. External traffic sounds, such as tires humming and engines rumbling, horns honking, sirens wailing, and people talking and shouting—along with more distressing sounds such as tires screeching, vehicles crashing, or people crying for help—all contribute to responsible decision-making in such an erratic and jumbled context. Similarly, sounds coming from one’s own vehicle convey important information concerning its proper functioning, while various alarms already support regular drivers’ awareness and responsible behavior. It is evident how the mode of technological mediation exhibited by mono-sensory visual interfaces would limit ROs’ ability of acting on such a plethora of cues. For example, rapidly approaching emergency vehicles signaling their presence and their urgency through sirens would not be perceived, just like the honks of other vehicles possibly warning for undetected dangers or the thud of a rear-end collision. Similarly, a noisy fault in an unsensed physical vehicle component might pass unnoticed.
Audio feedback, however, does not entirely cover the reductions involved in mono-sensory visual interfaces. Being capable of verbally communicating with other people is also a sound-related dimension of driving that falls outside its visual mediation. An urban car-sharing service could hardly do without interfaces for communicating with passengers, law enforcement agents, and other road users. Acting responsibly while operating a vehicle remotely does involve communicative tasks [
1,
16]. For example, the possibility for ROs to issue instructions to passengers inside the vehicle would improve collaboration and, on some occasion, ensure passenger safety, e.g., if passengers engage in inappropriate, risky behavior. Indeed, assisting passengers with tasks such as confirming passenger boarding or providing guidance in emergency situations seems to fall within the purview of ROs’ responsibilities. However, it is important to consider the privacy risks raised by always-on microphones for continuous monitoring placed inside remotely operated vehicles, since the passengers’ conversations would inevitably be caught. To address this, it has been suggested to opt for an on-call button instead of continuous monitoring [
25]. However, on-call buttons would not make it possible for ROs to hear noises coming from faulty components. Similarly, interacting properly with law enforcement officers during stops or accidents also appears to be necessary, while the possibility of verbally interacting with other road users might also prove effective in some safety-critical situations.
To cope with these requirements, audio interfaces would then involve comfortable, high-quality headphones or earphones transmitting sounds caught by microphones installed inside and outside the vehicle aimed at enhancing the sense of immersion in the driving task. Communication with people inside (and, perhaps, outside) the vehicle could be made possible through microphones transmitting ROs’ voice to vehicle speakers [
51,
52].
Some specificities of the mediation process require attention. First, it is to be noted that the amplification of ROs’ hearing is associated with displacement: ROs are located in an environment that is different from the one producing the sounds they hear. At the same time, noise is necessarily present where ROs’ control stations are located, particularly if ROs can communicate verbally with people at the vehicle’s location while working side by side with other ROs in facilities hosting multiple control stations. Noise isolation, then, becomes essential to allow ROs to focus on critical auditory cues while minimizing external distractions—apart, of course, for environmental safety-critical sounds such as fire alarms. The right amount of isolation is important to achieve safety at both locations involved in the mediation of driving.
Moreover, an interesting reduction in the mediation of hearing concerns the possibility of locating the spatial source of a sound [
41]. While in the unmediated settings of regular driving, it is often possible to realize whether a sound comes from behind, ahead, aside, or inside the vehicle, this spatial characterization of sounds becomes lost in the mediation unless dedicated technologies are deployed to retrieve it. For instance, the implementation of 3D audio systems would improve spatial awareness by simulating sound sources from different directions. This would potentially create more immersive soundscapes, enabling ROs to accurately locate auditory cues. A similar solution might importantly support responsible decision-making in situations in which ROs need to figure out where emergency or law enforcement vehicles signaling their incoming arrival through sirens are about to appear or need to locate the exact position of a horn sound [
16]. In addition, immersive soundscapes mimicking the auditory conditions of regular driving might contribute to making RD more realistic, thus counteracting the troublesome impression of an overly gamified experience.
Finally, audio feedback offers avenues to amplify the kinds of information perceivable by hearing through a translation process analogous to the one already discussed with reference to VR and sight. Indeed, many current vehicles already implement sound alarms and warnings aimed at supporting responsible driving when vision is variously impaired. For example, proximity or lane departure alarms warn distracted drivers when a collision is imminent or the vehicle is drifting, while speed alarms make sure drivers do not drive too fast without noticing. In all these instances, predominantly visual information is translated into sound cues to prompt responsible behavior. Given the overreliance on visual inputs and related risks of cognitive overload, integrating similar audio technologies in RD HMIs seems important to put ROs in best possible conditions to exercise responsibility. Indeed, hearing—the receptivity of which cannot be easily impeded—lends itself better than eyesight to be relied upon in cases of emergency. Moreover, sound-based feedback might be extremely useful during complex maneuvers where depths and widths are difficult to evaluate correctly due to the reductions of visual HMIs and would bring much needed clarity without burdening sight. Warning sounds and alarms, moreover, might prove very effective in countering distractions or unsafe driving behavior ensuing from the feeling of disconnectedness and lack of immersion. As for VR solutions, however, this new language of acoustic signals must be properly learned to be seamlessly integrated in the driving experience. Specific training seems crucial for putting ROs’ in the best conditions to uphold safety and responsibility.
Finally, the mediation of the driving experience provided by multi-sensory HMI also comes with interesting challenges. One challenge that stands out is the necessity to construct a coherent multi-sensory experience. Unmediated driving perception is holistically embodied, which naturally occasions synchronized experiences or, as Ihde [
30] (p. 77) noted, “a unified sensory experience of things”. On the contrary, the technological mediation of the driving experience breaks down this perceptual whole into separate input fluxes, which then need to be recomposed in a synchronized whole. Unsynchronized HMIs would massively impact on ROs’ capacity of interpreting the information relayed, which would increase their cognitive load and probably lead to mistakes and difficulties. Moreover, retrieving as much as possible of the embodiment character that makes unmediated perception a whole seems important to fully exploit familiar cognitive dynamics combining different perceptual data to navigate through complex situations successfully. For instance, research suggests that peripheral sounds can enhance visual perception and improve SA: auditory cues seem to selectively prime visual neurons, preparing them for the appearance of visual objects [
41,
53]. This adaptive mechanism highlights the importance of integrating auditory feedback into RD interfaces and of making sure that different mono-sensory HMIs are duly synchronized into coherent driving experiences. In this case too, then, low latency and wide bandwidth (along with high reliability of involved hardware) are necessary conditions for the timely transmission of high-quality sound data. As already mentioned, even though these technical requirements extend beyond HMI design, they are crucial for responsible RD and must never be underestimated.
4.3. Physical Feedback
The fact that regular drivers perceive physical forces while moving around in their vehicles is so familiar that it almost passes unnoticed. Differently from seeing and hearing, being capable of perceiving forces and factor this information in while driving is not an object of specific tests, measurements, or legal requirements. It is simply presupposed as a factual component of the driving experience. As such, it definitely contributes to providing information to drivers essential for the exercise of safety and responsibility [
16,
54]. Indeed, various physical sensations experienced while travelling inside a vehicle support SA and responsible driving: the push of acceleration, the pull of (sudden) brakes, vibrations and bumps caused by potholes or poor road surface, centrifugal thrusts during turns, and so on. Integrated with visual and auditory information, physical feedback helps drivers make sense of traffic situations and navigate them responsibly.
According to their characteristic amplification/reduction structures, both visual and auditory HMIs set aside physical forces. However, it is once more important to stress that exclusions such as this one do not carry any considered judgment on the relevance of the excluded information. On the contrary, reductions just result from the mere process of technological mediation. It is therefore critical to raise awareness on what remains excluded from given instances of technological mediation and carefully evaluate whether the silenced information is actually significant and, thus, should somehow be retrieved. Given the responsibility-enhancing potential contained in physical feedback, it is advisable to provide HMIs for its transmission to ROs.
Physical feedback information that could be relayed on to ROs is multifarious and includes sensations that mimic the feeling of acceleration, braking, turning, incline, and road surface texture [
43,
55]. It has already been mentioned how difficult it is to provide effective cues to ROs for determining acceleration, breaking, and speed. Indeed, it is difficult to accurately judge vehicle speed and stay engaged in the driving task without force feedback pushing drivers back into their seat or vibrations from the friction of the tires on the road. If ROs lack the correct perception of these aspects, they might easily end up operating abrupt maneuvers and engage in behavior that would worsen driving fluidity. Moreover, a lack of road surface feedback would reduce the RO’s ability to detect possibly dangerous pavement imperfections such as bumps and cracks. Lack of centrifugal feedback makes the experience of turning—already complicated by vision-related reductions—much more abstract and unfamiliar, while events such as skidding on, e.g., icy roads would become hard to detect. Furthermore, disembodiment or physical disconnectedness appear to lie at the heart of the already mentioned risk of disengagement and less attentive driving due to an overly gamified driving experience, in which ROs struggle to remain conscious of the material repercussions of their actions.
Physical feedback seems especially important in urban environments, where sharp turns in busy streets, frequent acceleration and deceleration driving patterns, obstacles like manholes or potholes, and adverse weather conditions such as rain or snow are frequent and significantly impact on responsible driving. For all these reasons, physical feedback would help ROs controlling vehicles more safely through city streets.
Apart from capturing environmental information, force feedback could also be used to convey alarms and warnings without burdening the already taxed sense of sight. In a way, easily recognizable vibrations signaling danger could be thought of as an amplification of goosebumps, keeping ROs engaged and watchful in risky scenarios. For example, vibrating alerts can signal obstacles or lane drift. Moreover, information which is reduced through visual interfaces, such as depth or width, could be translated into the language of vibrational patterns—a language ROs might learn how to interpret to obtain a better reading of the environment. Tactile navigation instructions could provide directional cues through steering wheel vibrations, enabling drivers to navigate without looking away from the road. These haptic features, if correctly integrated, might enhance RO’s driving experience by prioritizing safety and attention to the road, both critical components of responsible RD. All in all, force feedback HMIs offer the opportunity to integrate the information relayed by other mono-sensory HMIs and contribute to recomposing the multi-sensory unity of the driving experience while also offering avenues for amplifying the ability to gather otherwise difficult-to-access pieces of information that could greatly support responsibility behind the remote wheel.
In RD, physical information can be conveyed through various HMIs designed to translate inputs into tactile (or haptic) outputs at ROs’ location. In the next subsections, the following HMIs for physical feedback are considered: steering wheels and pedals, seats, haptic displays, and wearable devices. While some of them are adopted in current setups, some are not yet been applied to RD but rather to other remote operation domains (cf., e.g., Unmanned Ground Vehicles [
56,
57,
58]) or, more in general, to automotive interface design [
54,
55,
59,
60]. Moreover, many of the considered HMIs for physical feedback are adopted in the gaming industry to provide more realistic gaming experiences. When suitable to support the exercise of operators’ responsibility, we believe that future research should further explore their adaptation to remote urban driving control stations.
4.3.1. Steering Wheels and Pedals
Steering wheels and pedals (e.g.,
Figure 5) endowed with force feedback capabilities are commonly used in RD stations to replicate the tactile sensations experienced by drivers in traditional vehicles. While in regular driving this feedback is part and parcel of the vehicle’s operation, remote steering wheels and pedals reduce the connection with the operated vehicle, so that the link must be restored by design. These HMIs, while allowing control, also provide realistic resistance, torque, and feedback, enabling ROs to feel the forces as if they were in the cockpit holding the steering wheel and pressing the pedals. For example, steering force feedback allows drivers to gather information on road surfaces, tire–road force, and vehicle motion. The absence of steering force feedback leads to perceptions of increased difficulty and decreased safety during RD compared to real-life driving experiences.
Since physical resistance must be reproduced by design, it is crucial to select the appropriate levels of force. Several solutions are currently adopted to provide force feedback to the steering wheel, each displaying its own advantages and drawbacks [
2,
42,
43]. Pedals designed to replicate the resistance of a car’s brake and accelerator are widespread. This replication is essential to ensure accurate responsiveness and driving fluidity. For what concerns steering wheels, conventional steer-by-wire systems and RD steering systems share similarities, indicating that classical steering force feedback models used in steer-by-wire may be applicable to RD scenarios. Other possibilities include gear-driven steering wheels employing gears to deliver feedback, an affordable solution, which, however, may be perceived as less realistic; belt-driven wheels, which implement a belt mechanism for force feedback transmission and strike a more even balance between realism and cost; and direct drive wheels, high-end systems where algorithms simulate driving forces, a dedicated motor reproduces them, and a shaft physically relays them to the steering wheel, thus offering both accuracy, power, and realism.
The possibility of customizing force feedback through software design makes the last option particularly suitable for RD, especially in cases where operators control multiple vehicles during their shift. Indeed, different vehicles might present different levels of resistance, torque, and feedback even if they have similar dimension. Transitioning from one vehicle to another would pose a challenge for ROs if differences in physical feedback were overlooked. In this sense, the technological mediation of physical forces might run the risk of reducing vehicle-specific differences to a single, generalized, but inaccurate driving experience. Adjusting force feedback to the specific characteristics of each vehicle seems more promising a strategy to support responsible RD
4.3.2. Emerging Haptic HMIs: Seats, Haptic Displays, and Wearables
While steering wheels and pedals constitute conventional elements in remote control stations, additional haptic HMIs such as seats, haptic displays, and wearables are emerging as potential solutions for RD.
A set of HMIs for physical feedback relies on seats to mediate forces—a strategy mostly explored in the gaming and racing simulation industries [
61]. One example of this category of HMI are tactile transducers integrated into to the station platform or seat to simulate the forces in the cockpit. For instance, Buttkicker by ButtkickerHaptics (Westerville, OH, USA;
https://thebuttkicker.com/ (accessed on 24 February 2025)) emits vibrations reproducing the feeling of acceleration, braking, shifting gears, navigating bumps in the road, and encountering sharp corners. Case studies have shown that tactile transducers contribute to a more immersive driving experience for ROs, improving their ability to perceive and respond to dynamic driving conditions [
8].
Another solution that could be borrowed from the gaming industry is the adoption of haptic chairs to simulate force feedback from the road. For example, Motion 1 Haptic Gaming Chair by Cooler Master Technology (Taipei City, Taiwan;
https://www.coolermaster.com/en-global/products/motion-1/ (accessed on 24 February 2025)) can move, incline, and deliver different sensations to the occupant by adjusting the vibrational feedback to match the expected sensations during the drive. In this way, much of the information induced from physical forces is made available to remote drivers too, which can assist them in exercising responsibility.
In addition to more skeuomorphic solutions such as steering wheels, pedals, and seats, other avenues are also emerging to add force feedback to the RD experience. In this context, haptic displays have been playing a remarkable role. Haptic displays are technologies that utilize pressure or vibration stimulators to interact with the user’s skin, generating tactile sensations to convey proprioceptive information about position, orientation, and movement. In so doing, they show potential to provide real-time force feedback during driving operations.
The literature on haptic displays for RD mostly focus on control issues. Indeed, haptic displays endowed with gesture recognition technology might offer valuable alternatives to virtual dashboard buttons and touchscreens, which could require drivers to divert attention from the road in order to be operated. For example, it has been shown that large touchscreen interfaces with virtual buttons demand considerable visual attention, particularly when not paired with the appropriate physical feedback [
62]. To cope with this issue, mid-air haptics with gesture controls are being studied to be applied to both automotive dashboards [
54,
55] and RD [
59,
63].
Even though haptic displays are mostly used as controllers, they show the potential to distribute cognitive load beyond visual and audio stimuli by incorporating physical feedback, resulting in a more integrated driving experience, which is particularly important in noisy environments where sustained vigilance is required, and audiovisual channels might already be taxed [
64]. Haptic feedback systems have indeed shown promise in providing efficient substitution feedback for visual and auditory cues, offering rapid perception even in conditions of high cognitive load such as urban traffic. They have also proven to be more effective than other signals in alerting drivers of safety issues during emergencies [
61].
Wearable haptic devices, such as haptic gloves and vests, could also be employed to provide ROs with localized tactile feedback during RD operations. Wearable haptic devices such as, e.g., Tactsuit Pro by bHaptics (Daegeon, South Korea;
https://www.bhaptics.com/tactsuit/tactsuit-pro/ (accessed on 24 February 2025)) employ embedded actuators or vibration motors to deliver haptic stimuli directly to the RO’s hands or body. Tactile garments can serve various purposes, including aiding navigation, enhancing SA, and avoiding collisions. These functions share a common emphasis on spatial localization, aiming to provide directional cues and alert the driver of nearby objects. Case studies have demonstrated the effectiveness of wearable haptic devices in enhancing the perception of vehicle dynamics and road conditions [
54,
55]. This, in turn, could potentially improve ROs’ overall SA and foster responsible RD.
5. Conclusions and Future Outlooks
Making sure that ROs are put in the best position to exercise responsible driving is prerequisite to enjoying the benefits that the technology might yield and, thus, contributing to fostering safer, more ethical transportation systems. As our research shows, philosophical insights on technological mediation are helpful to realize the key role that HMIs play in this regard. Since ROs’ access to environmental information is entirely mediated through HMIs, their exercise of safe and responsible driving massively depends on how relevant data are gathered, elaborated, integrated, and conveyed to them. Works on technological mediation suggest that a magnification–reduction structure invariantly accompanies it, so that some aspects of the mediated experience are amplified, while other aspects are constrained or silenced. However, reduced aspects might be extremely relevant to the exercise of responsibility, so that they should not be forgotten, but rather critically examined and, if relevant, reintegrated in the mediated experience by means of dedicated HMI solutions.
Based on the discussion carried out so far, some general conclusions could be drawn. While the driving experience is most commonly mediated through visual interfaces, the related reductions and their likely impacts on responsible RD suggest that mono-sensory HMIs should be complemented with other kinds of synchronized informational feedback. In other words, visual HMIs constitute a necessary but not sufficient condition to responsible RD. Indeed, well-designed HMIs distributing messages across different modes have shown the potential of supporting SA, lowering cognitive overload, and countering the feeling of detachment that is often associated with virtually mediated forms of experience. Moreover, intelligently combining different forms of feedback might help augmenting ROs’ capabilities of driving safely and responsibly, supporting their capacity to navigate complex urban scenarios, become aware of obstacles or risky traffic situations, acknowledge the presence of vulnerable road users, locate potential technical malfunctions, and so on.
Since multi-sensory HMIs exhibit a clear advantage on mono-sensory solutions, we advise to pose them as a desideratum of responsible RD research. However, we acknowledge that this rather general guideline—although based on evidence presented in the literature—still must be both further validated and specified in more concrete design requirements, testable hypotheses, and experimental designs. As stated in the introduction, the scope of the present research is mainly methodological, so that empirical research and experimental studies are needed to back the results of our analysis with concrete evidence to a greater extent. As observed by [
11] (p. 3), “since the remote operation of AVs has not been widely rolled out so far, there is limited knowledge about concrete use cases and scenarios that are most relevant to it”, so that “more exploration and experimentation are required to determine the most suitable format for RDP [Remote Driving Platform] setups” [
2] (p. 14). In addition, responsible RD has not been the main subject of experimental studies so far. Future experimental research, therefore, is needed to further validate the results of our study with empirical data on the extent to which ROs’ exercise of responsibility is impacted by mono-sensory and multi-sensory interfaces. Future experimental studies should shed more clarity on design parameters and evaluation metrics to translate into quantitative guidelines and requirements the qualitative insights of our analysis.
In this sense, it is important to adopt human-centric design methodologies (e.g., [
11]) to shed more light on amplifications, reductions, and integration issues pertaining to various configurations of multi-sensory HMIs. Two aspects appear relevant in this regard: user experience studies and stakeholder involvement. First, technical research should be increasingly integrated with interaction studies centered on usability, user experience, and learnability. User-centered approaches aimed at measuring perceived cognitive workload and interaction quality would help assess some of the issues and opportunities discussed above. Secondly, co-design methodologies involving both direct (e.g., ROs, potential passengers, etc.) and indirect (e.g., pedestrians, law enforcement officers, etc.) stakeholders would likely provide valuable insights on HMI design and solutions for urban RD. More broadly, intercepting the valuable expertise of professional drivers might help with fine-tuning HMIs to the special requirements of urban traffic.
This mention of professional drivers points to a final set of considerations on social requirements that deserve to be mentioned. The complexity of the technological mediation of driving suggests that the transition from regular to remote modes is all but seamless. Even though HMIs aim at reproducing the conditions of regular driving as realistically as possible, technological mediation always implies transformation. Indeed, the mediated driver experience presents countless specificities concerning not only peculiar amplifications or reductions, but also specific translations of information from one sensory language to another. The opportunity of transmitting relevant data to ROs by translating them into visual, audio, or haptic signals has been considered several times. As Ihde [
30] (p. 85) stressed, these solutions require users “to know how to read the instrumentation and from this reading knowledge get hold of the ‘world’ being referred to”. In other words, dedicated education and training is required to properly read and re-translate these data into actionable information. Far from removing it, well-designed HMIs pose the need for high standards of RO training and certification. Comprehensive training programs should be offered to provide ROs with education concerning their responsibilities, skills necessary to operate vehicles through given HMIs, procedures to safely handle potential issues, and protocols to manage safety-critical urban traffic scenarios.
To conclude, even though HMI design cannot by itself ensure responsible RD, its role in the pursuit of this objective is extremely significant. Applying the conceptual tools of the philosophy of technological mediation is helpful to understand how different interfaces amplify and reduce key aspects of the driving experience. Moreover, it offers insights on how to structure a RD experience that puts ROs in the best position for exercising responsibility. Ensuring that these values are opportunely integrated into RD interfaces is a critical mission for the future of the technology, particularly in contexts of uses so delicate and risky as urban environments. We hope that this research might serve as a first step towards the design of systems that align to the ethical values of urban transportation.


 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



