A laboratory-based similar model can truly reflect physical material’s physical behavior, including nonlinearity, anisotropy, and time-dependent properties, without simplifying assumptions. The lab model provides an opportunity for intuitive observation of physical phenomena such as fracture development, failure patterns, deformation processes, etc. A lab model can also provide reliable validation data for numerical models; this is very important in validating the results of theoretical analysis and numerical simulation.
2.1. Similarity Constant
The model size is scaled down from the actual dimensions of the prototype structure to an appropriate proportion. In the initial phase, to ensure genuine and reliable test outcomes, efforts are made to facilitate the ease of conducting similar model tests. The deformation and stress of the similar model are meticulously monitored using a variety of specialized equipment. The results derived from the similar model tests are notably reliable and readily applicable. However, to theoretically guarantee the similarity ratio between the model and the actual engineering scenario, the fundamental principles of elastic mechanics are employed. This ensures that the similar model and the actual engineering project adhere to specific similarity indices. Such adherence allows the test results to accurately mirror the mechanical phenomena occurring in real engineering situations right from the source. The theory of similarity encompasses the first, second, and third theorems of similarity, which collectively underpin the validity and applicability of the model’s findings to real-world engineering contexts.
In this study, a derivation method for similarity criteria based on dimensional analysis was employed to ascertain the test similarity constant. Within a typical engineering system, three fundamental dimensions generally prevail: length [L], time [T], and either force [F]—constituting the FLT system—or mass [M]—forming the MLT system. Specifically, this study adopts mass, length, and time as the foundational physical quantities, utilizing kilograms, meters, and seconds as their respective base units. Through a meticulous analysis of the dimensions of physical quantities, a corresponding dimensional matrix was constructed. Adhering to the principle of dimensional equilibrium, the similarity criterion for the test is systematically deduced. This approach ensures that the relationships between the model and the prototype are accurately represented, thereby facilitating a reliable extrapolation of the test results to real-world engineering applications.
The basic physical quantities selected are mass (
M), length (
L), and time (
T). Their dimensions are as follows:
The physical quantities discussed below include elastic modulus (
E), density (
ρ), stress (
σ), strain (
ε), displacement (Δ), velocity (
v), acceleration (
a), time (
t), frequency (
f), etc. The following are dimensional expressions of the relevant physical quantities:
According to the dimensional expression of the above physical quantities, a dimensional matrix can be constructed. Each row of the matrix table represents a physical quantity, and the values in the column represent the exponents of mass (
M), length (
L), and time (
T) in the dimension of that physical quantity.
a1,
a2,
a3, …,
a9 represent the indices of the physical quantities
E,
ρ,
σ, and
f, respectively. Then, the dimension matrix is shown in
Table 1.
According to the principle of dimensional equilibrium, the following equation can be obtained, ensuring that the dimensions of each physical quantity are balanced over the fundamental physical quantities (M, L, and T).
For the mass dimension, there is the following equation:
For the length dimension, there is
For the time dimension, there is
Given that the number of equations is insufficient to match the number of variables, a direct solution for all unknowns is unattainable. Consequently, it becomes necessary to designate certain variables as free parameters and express the remaining variables as functions of these chosen parameters. In this study, we posit that certain quantities are known, and the other variables are subsequently represented in terms of these known quantities. By integrating and manipulating the equations, the following relationship can be derived:
Assuming that there are 6 known quantities, the number of similarity criteria is 6. is set to 6 sets of parameter values respectively, that is,
when , , then , , ;
when , , then , , ;
when , , then , , ;
when , , then , , ;
when , , then , , ;
when , , then , , .
Through the above analysis, the following
matrix shown in
Table 2 can be obtained. Each row represents a dimensionless factor, and each column represents a different physical quantity and its corresponding power exponent. The values in the table represent the power of each physical quantity in a dimensionless factor. According to the Buckingham
theorem [
24], the number of dimensionless factors is
, where
is the total number of physical quantities, and
is the number of fundamental quantities. The final 6 similar criteria can be expressed as
,
,
,
,
,
.
In line with Buckingham’s
theorem [
24], to ensure the requisite similarity between the model and the prototype, the following condition must be met:
where subscript p represents the prototype, and the subscript m represents the model.
In accordance with the principle of similarity constants, the specific similar conditions that this test fulfills, as delineated in Equation (9), can be articulated as follows:
Considering the engineering scale and laboratory test conditions of this study, due to the limitations of the testing machine and mold size, we chose the smallest possible similarity ratio to ensure the accuracy of the test results. An excessive similarity ratio may lead to boundary effects and size effects and affect stress distribution and deformation behavior; this can cause the failure mode to be inconsistent with the prototype, affecting the reliability of the result. The size similarity ratio between the prototype and the model,
, was finally determined to be 20, the mass density similarity ratio is
, and the elastic modulus similarity ratio is
. Finally, the similarity relationship between the engineering prototype and the indoor similar model can be determined as shown in the following table.
Table 3 lists the similarity relationship between the engineering prototype and the indoor similar model and lists each physical quantity and its corresponding similarity ratio. The similarity ratio refers to the proportional relationship between the model and the prototype in the physical quantity. Through this similarity relationship, the physical behavior of the prototype can be simulated in a scaled-down model, thus predicting the performance of the prototype.
2.2. Test Equipment
During the similar model scaling tests conducted in the shield tunneling chamber, the primary components utilized are the loading equipment system, sample molds, and monitoring equipment. The loading equipment system is a comprehensive setup that encompasses a loading frame, a sophisticated control system, an actuating system, and a data-monitoring system. These elements work in tandem to provide precise control and data collection throughout the testing process.
The sample molds play a crucial role in the preparation of scaled models. They consist of a model box specifically designed for crafting scaled-down samples that mimic the actual tunnel environment. Additionally, a tunnel model is included to simulate the shield driving and lining processes, thereby replicating the conditions encountered during real-world tunnel construction.
The data-monitoring system is an integral part of the testing setup. It is tasked with diligently monitoring the stress changes and distribution patterns in the strata located above the tunnel face, particularly in the area directly ahead of the shield tunneling process. Furthermore, this system also tracks the surface deformation processes occurring in the strata on the sides of the scaled test model. Through this comprehensive monitoring, valuable insights into the mechanical behavior of the tunnel and surrounding strata are obtained, facilitating a deeper understanding of the tunneling dynamics. The details are as follows:
- (1)
Loading device
The testing apparatus employed is a large-scale dynamic and static coupling loading system designed for assessing slope stability. This advanced system comprises several key components: a return reaction frame serving as the main engine, an electro-hydraulic servo loading system, an electrical driving system, a measurement control system, and a computer control and data-processing system.
This integrated system is capable of simultaneously applying dynamic and static loads in both vertical and horizontal directions. This dual-loading capability allows for an in-depth investigation into the mechanical behavior of large-scale soil samples under the complex interplay of dynamic and static forces. A schematic representation of the equipment is presented in
Figure 1.
During the testing procedure, the meticulously prepared sample is positioned on a trolley. The electrical driving system then precisely maneuvers the trolley to the optimal loading location. The electro-hydraulic servo loading system takes over, expertly controlling the horizontal and vertical servo actuators to impart predetermined loads onto the sample. Throughout the test, the measurement control system, in conjunction with the computer control and data-processing system, diligently records and stores the horizontal and vertical displacements of the sample model within the control computer. This comprehensive data capture ensures a thorough analysis of the sample’s response to the applied loads.
The back reaction frame type adopts the form of a reflexive integrated host frame, uses the whole cast frame structure, and forms a closed stress frame. The frame structure is stable and rigid, which can ensure the safety and stability of the test process. The frame size (length × width × height) of the host frame is (2800–3200) × (800–1000) × (2900–3200) mm. The constant loading rate of the test system ranges from 0.5 kN/s to 9.9 kN/s, and the relative error (accuracy) of the indicating value is less than 1.0%. The servo actuator stroke is 0–200 mm, and the output is 0–1000 kN, using a multi-channel closed-loop measurement and control instrument, electro-hydraulic servo valve control channel (force, displacement closed-loop control, 18-bit A/D), displacement sensor (0–200 mm, accuracy not less than 0.05%FS), and load sensor (0–1000 kN, accuracy not less than 0.05%FS).
- (2)
Sample mold
The tunnel is buried at a depth of approximately 20.0 m, with a diameter of 6.0 m. Based on the geometric similarity relationship between the engineering prototype and the indoor similar model, the scaled experimental tunnel has a burial depth of 1.0 m and a diameter of 0.3 m. To minimize the impact of the test model’s boundary conditions on the experimental results and to accommodate the size constraints of the testing equipment, the sample size for the scaled test was determined to be 1.5 m in length, 1.5 m in height, and 0.5 m in thickness. The scaled test sample was created by filling soil into the mold depicted in
Figure 2, which has an internal dimension of 1.5 m in length, 1.5 m in height, and 0.5 m in thickness. The tunnel scaling test mold, as illustrated in
Figure 3, comprises a tunnel mold and a sample box. The tunnel mold consists of a pressure plate, a force transfer rod, and a supporting structure, while the sample box is made up of a mold enclosure and high-strength plexiglass. Pins and stiffeners are incorporated to ensure that the plexiglass meets the testing requirements. Thanks to the transparency of the plexiglass, the deformation of the tunnel face during the shield propulsion process can be clearly observed. By taking into account the symmetry of the tunnel, this study considers the vertical plane passing through the center of the tunnel as the plane of symmetry. Consequently, only half of the tunnel is selected as the research object for the experimental investigation.
- (3)
Rail model
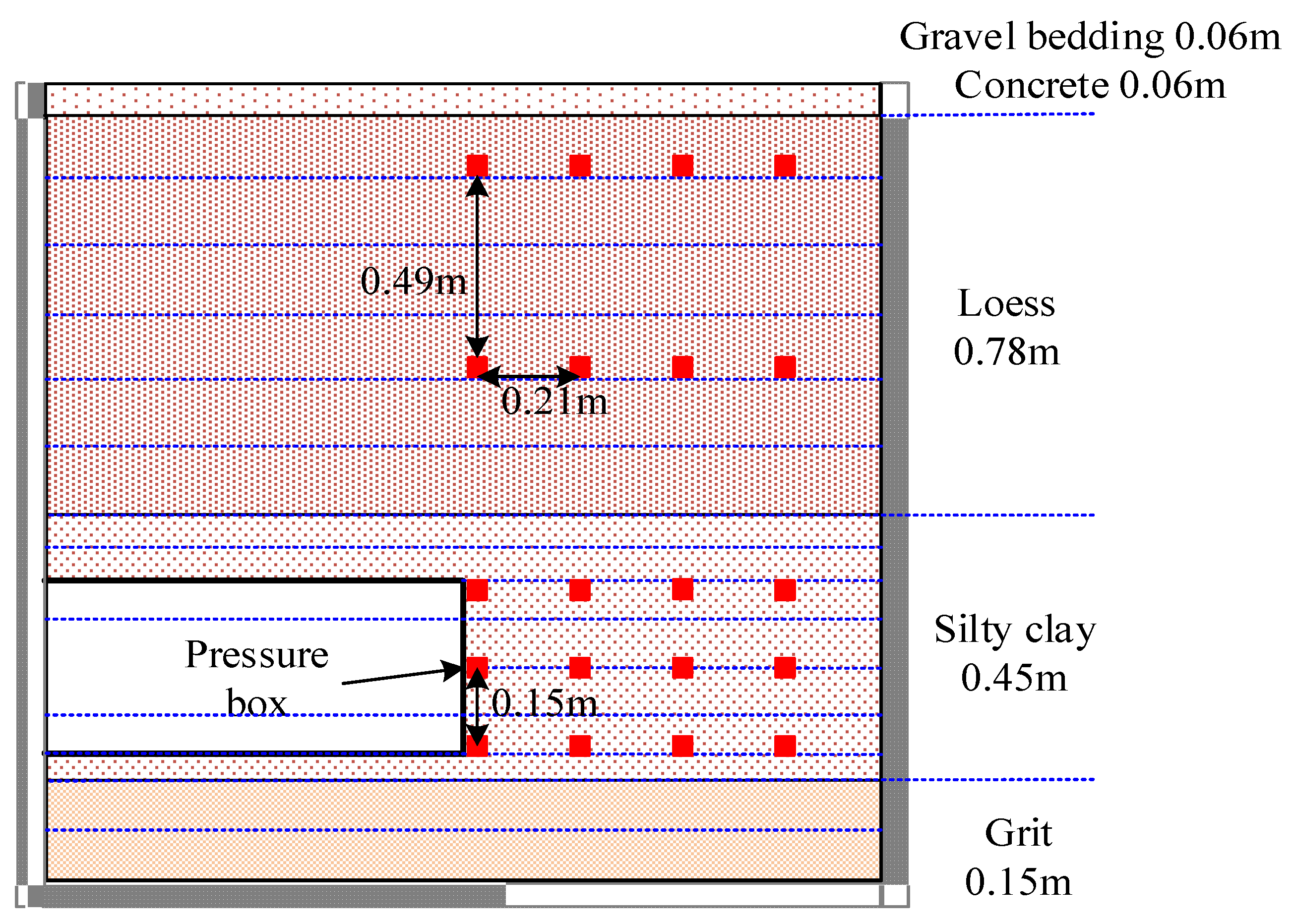
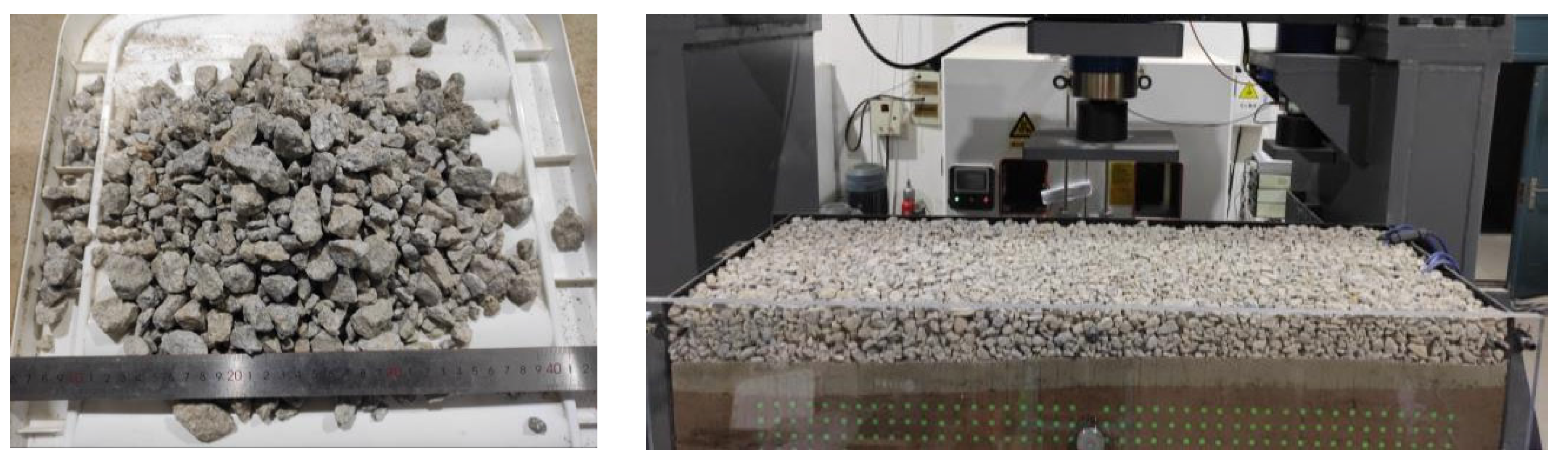
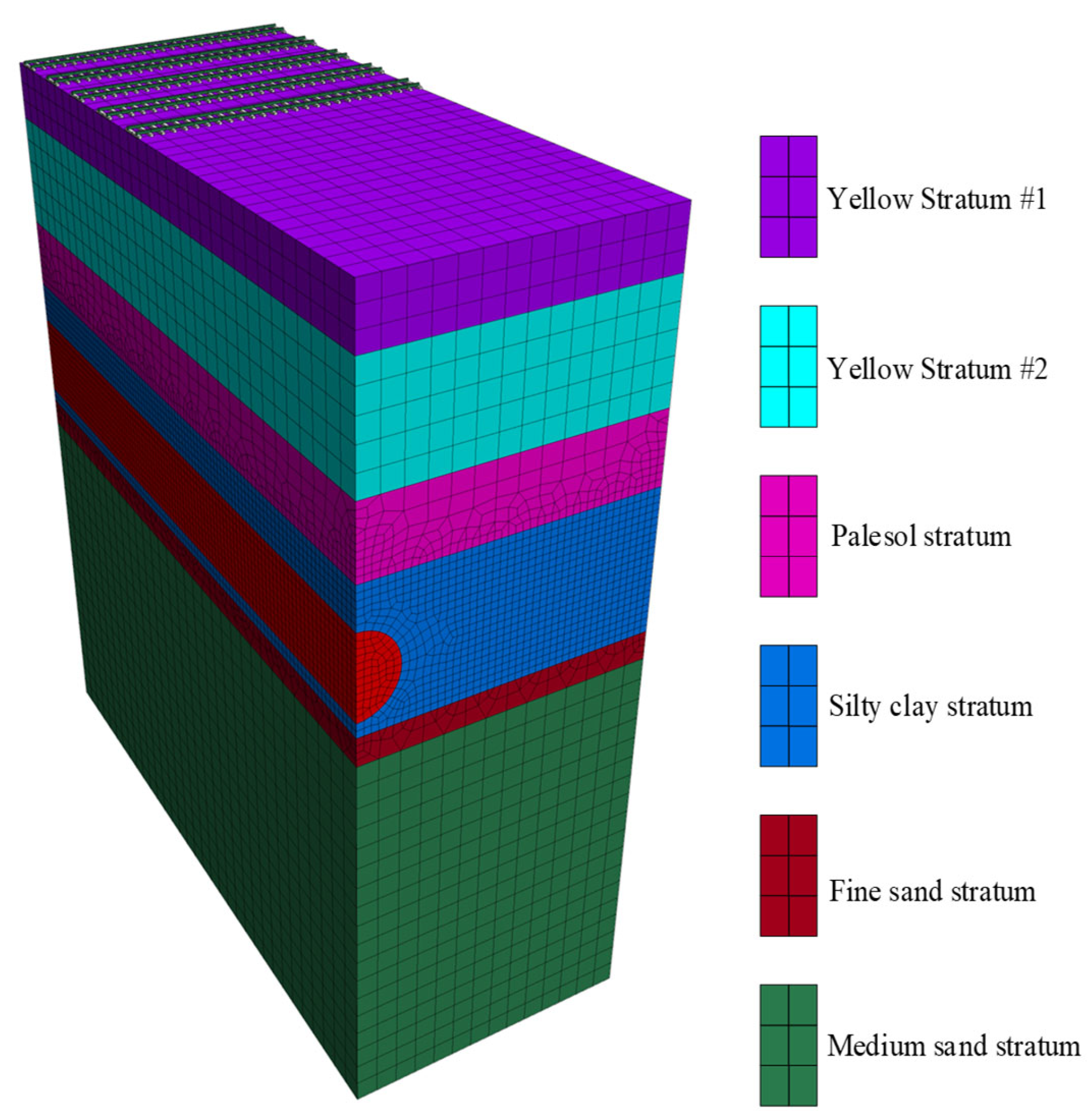
According to engineering practice and the feasibility of the research process, the overlying strata of the tunnel can be simplified into a 0.06 m thick gravel cushion, a 0.06 m thick cement-soil layer, a 0.78 m thick yellow soil layer, a 0.45 m thick silty clay layer, and a 0.15 m thick fine sand layer. In addition, there was Longhai Railway and Xulan high-speed railway on the ground surface. In order to consider the influence of vibration load during train passage on the formation-deformation process of the tunnel face during shield propulsion, a rail model similar to the train track structure was made (as shown in
Figure 4 and
Figure 5), and the rail model was placed above the similar model of the tunnel. The effect of train vibration load on the overlying strata of the tunnel can be simulated by applying a simplified load to the rail model through the slope stability system.
- (4)
Monitoring equipment
During the scale test of the shield tunnel, the YC-VWE-type vibrating wire earth pressure gauge provided by Changsha Yunchao Information Technology Co., Ltd. (Changsha, China) was used to monitor the pressure change process and the final pressure distribution characteristics in front of the tunnel face and inside the overlying strata. The YC-VWE-type vibrating string earth pressure gauge has a measuring range of 0–3000 kPa and a resolution of ≤0.025%; it is composed of a backplane, an inductor, an observation cable, a vibrating wire, and an exciting electromagnetic coil. It is suitable for long-term monitoring of compressive stress inside geotechnical materials and is an effective piece of monitoring equipment to grasp the changes in soil pressure inside geotechnical materials in real time, which can meet the needs of this test. The layout of the earth pressure box in the mold is shown in
Figure 6, which mainly focuses on the shield direction of the tunnel face and the soil layer above in order to monitor the change in soil pressure, which is mainly affected during the test.
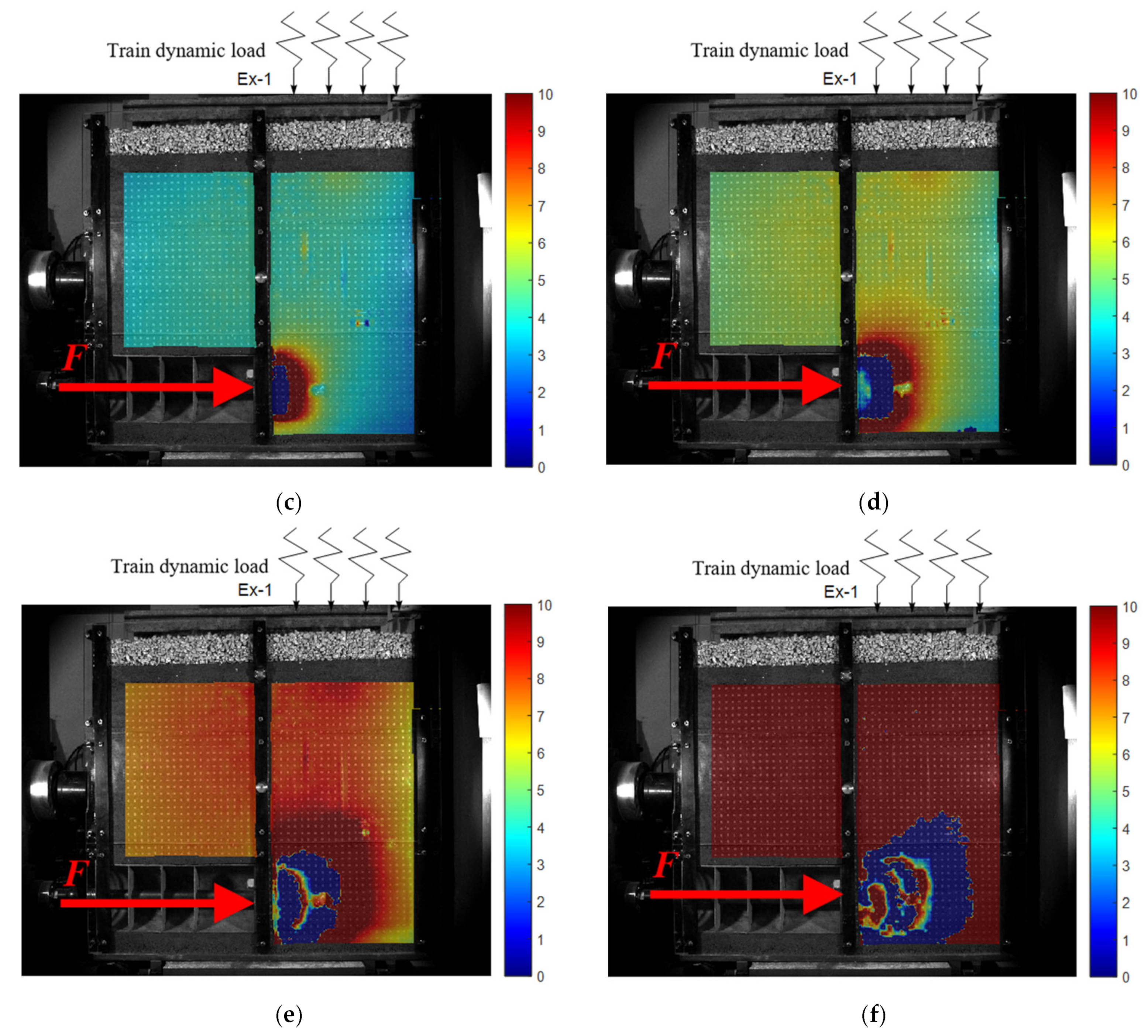
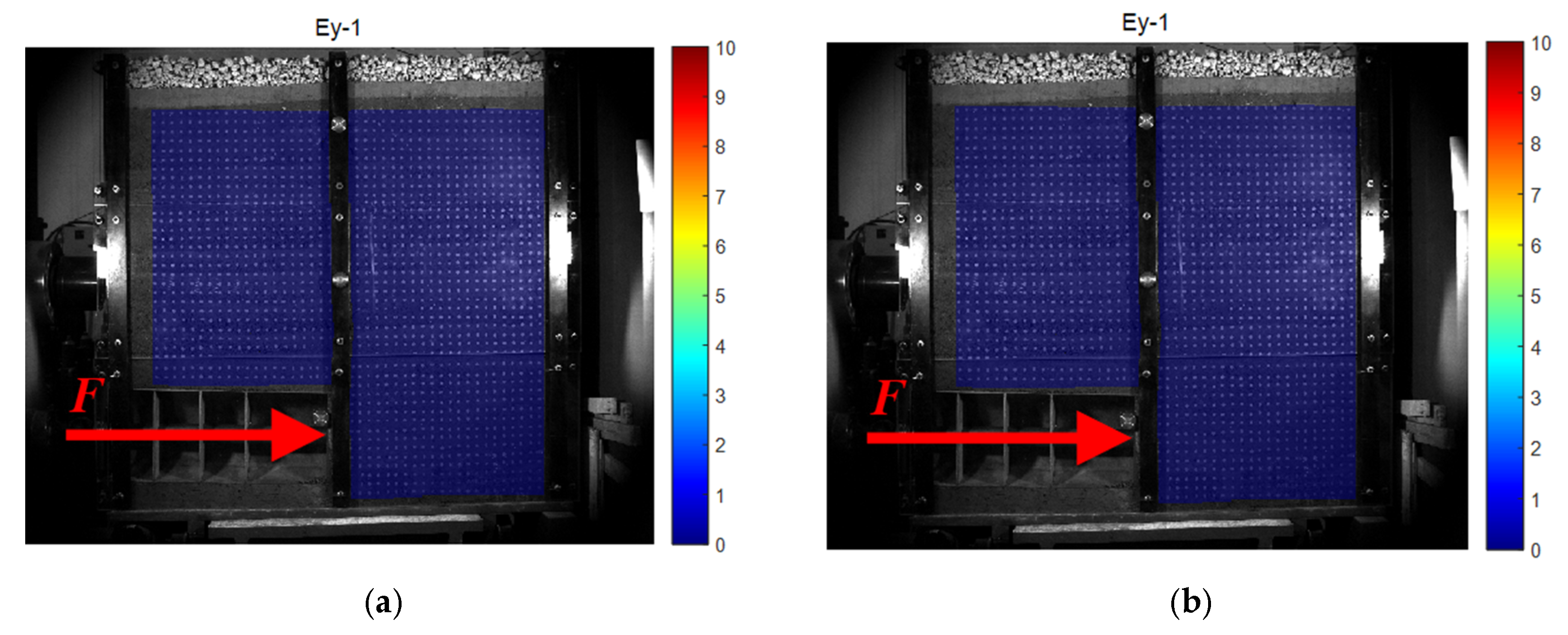
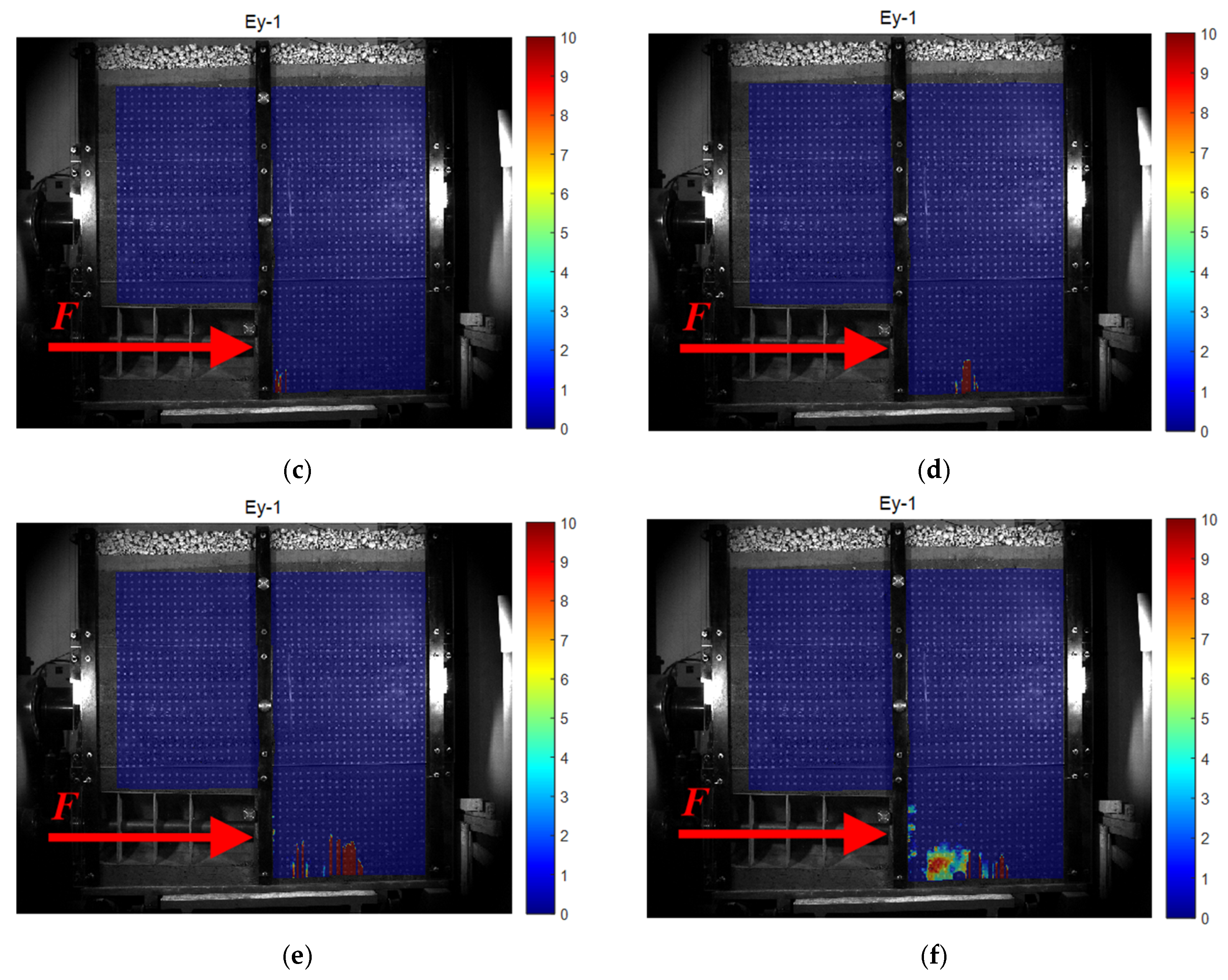
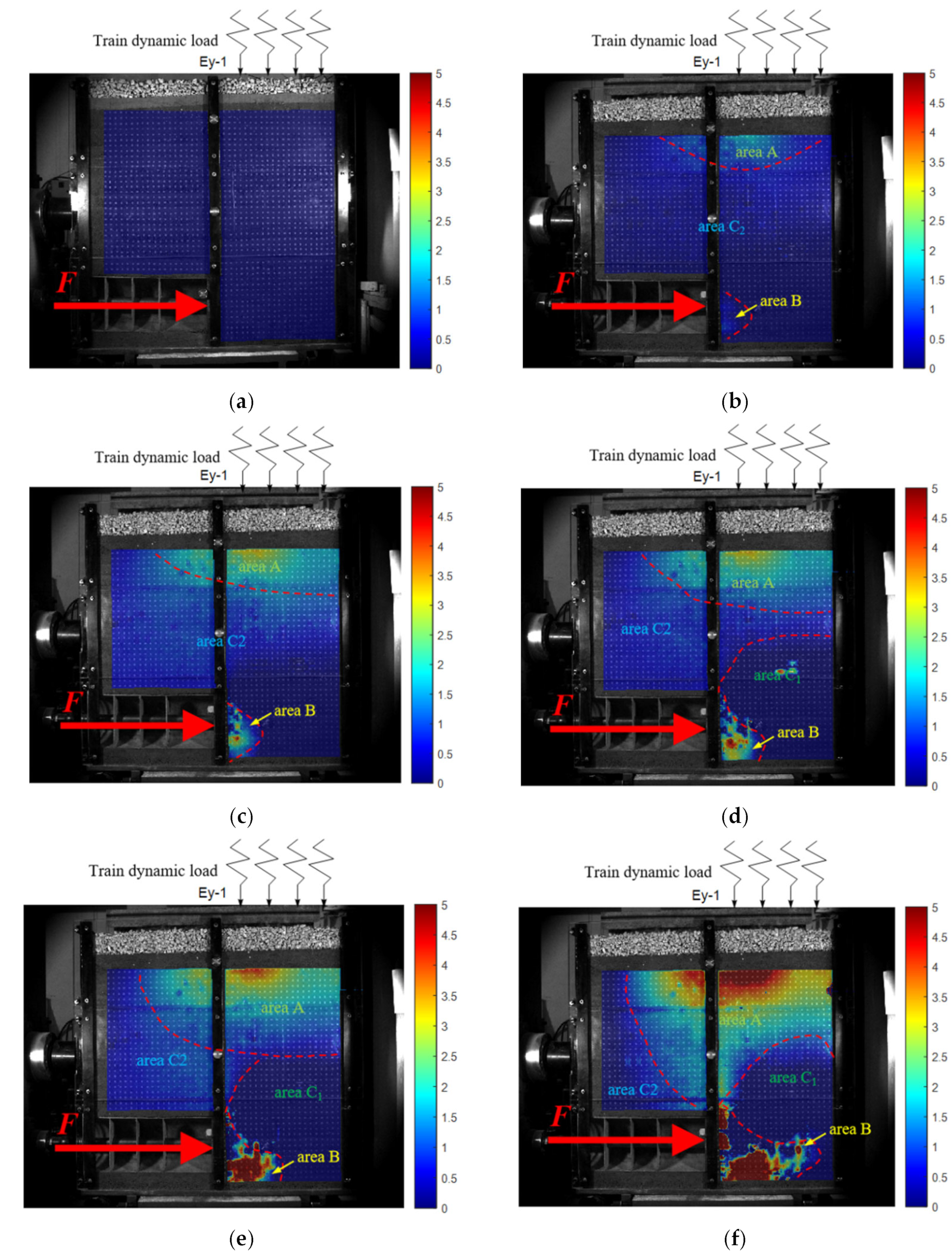
The 2D full-field strain measurement system collects images in real time (through a single industrial camera), captures the surface features of the specimen before and after deformation, identifies the surface feature changes in the measured object, and then obtains the corresponding co-ordinate changes in each pixel of the image through the digital image correlation algorithm, thus calculating the 2D displacement field, 2D strain field, and 2D deformation field data in the process.
The measurement results provided by the system include data, charts, and cloud images, which can intuitively and clearly reflect the displacement, deformation, and strain changes in the measured object, providing convenience for related research work. In this experiment, industrial cameras were used to photograph and record the whole process of shield deformation (on the side of the scaled test model), identify and track the displacement of specific points on the whole process of the shield deformation image, and generate a surface deformation cloud map and displacement vector map to analyze the deformation characteristics of the whole process of the shield tunnel face under the influence of train vibration load.
2.4. Test Process
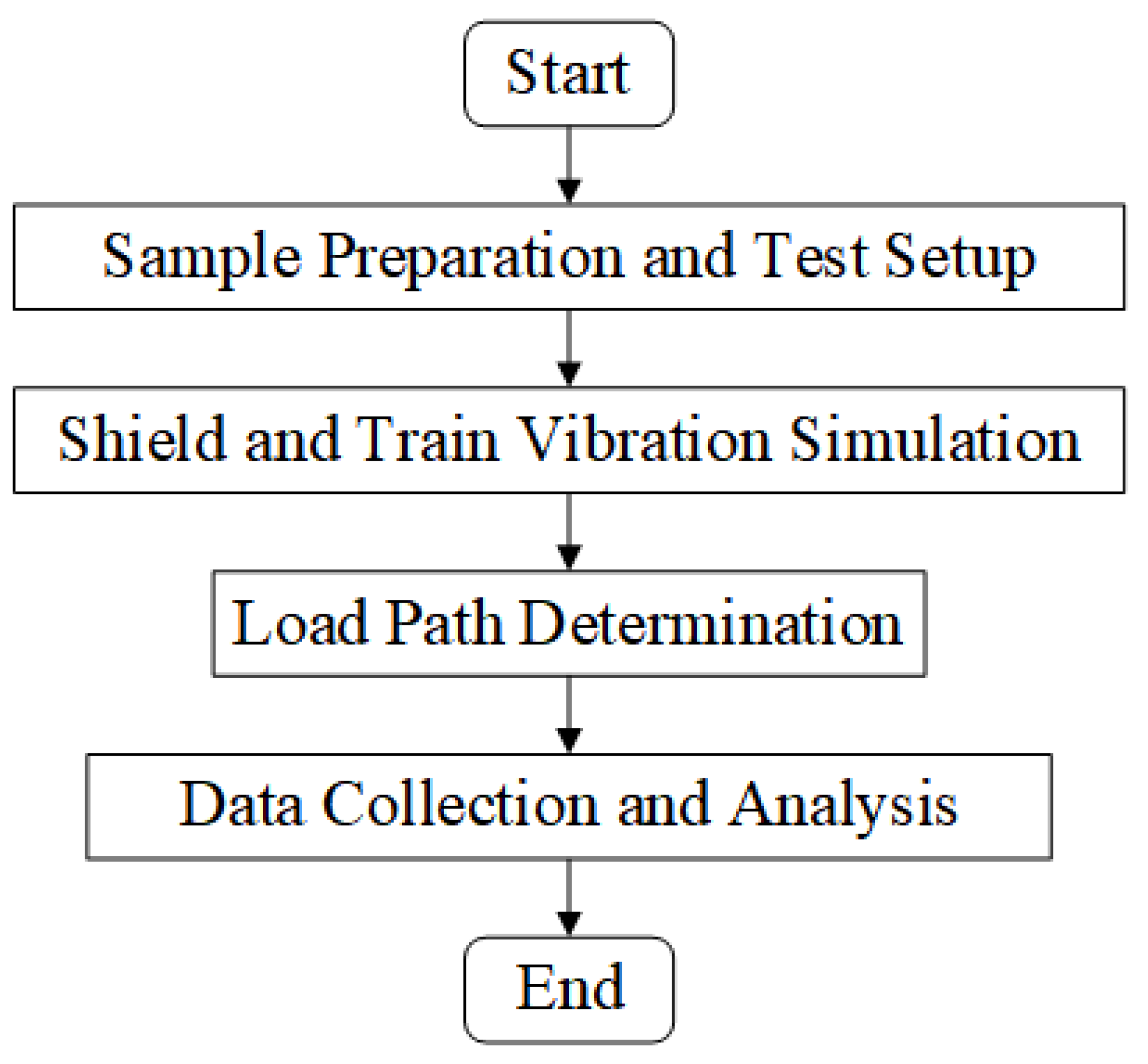
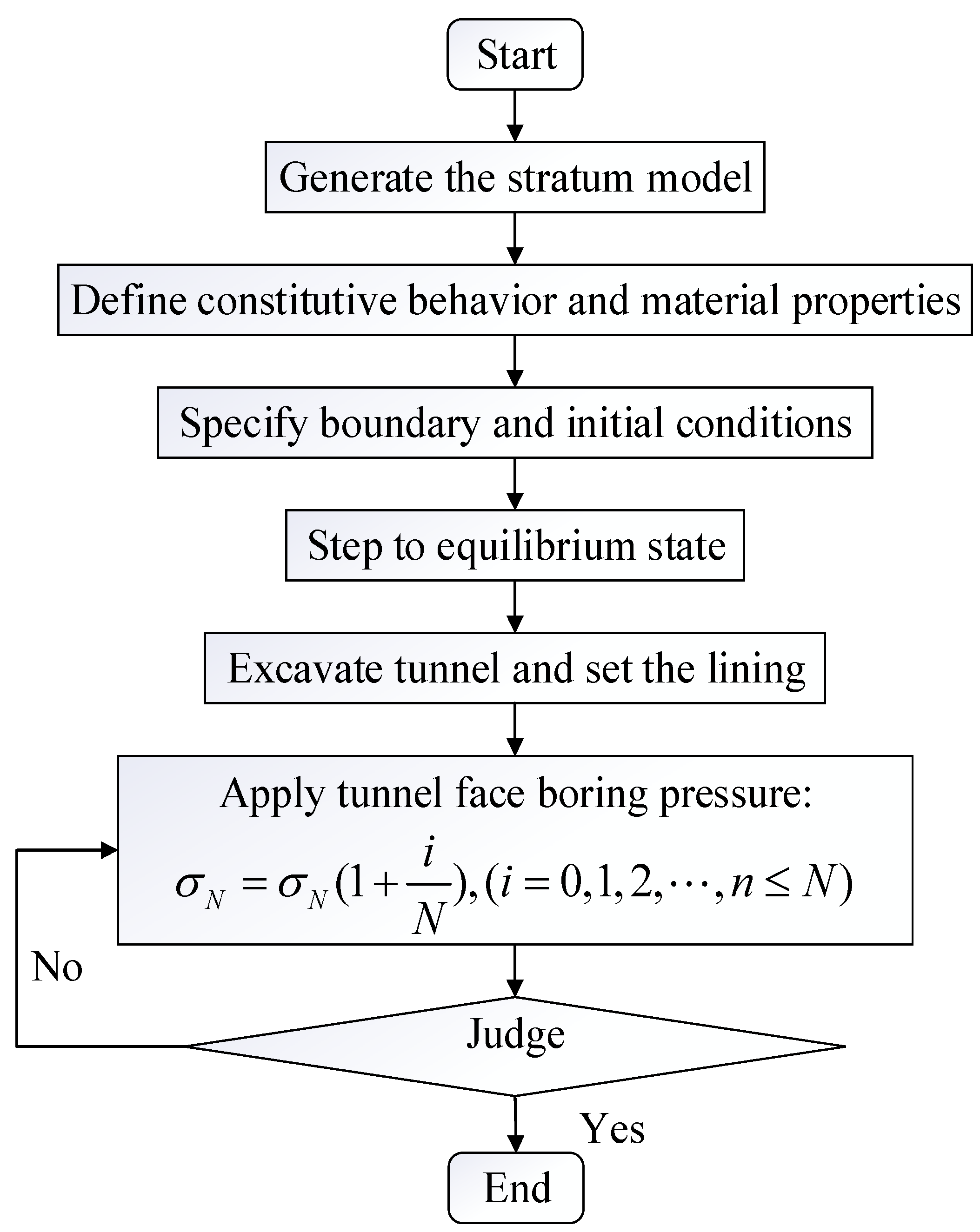
The flowchart of the test, including the main steps, is shown in
Figure 12 as follows.
- (1)
Sample preparation and test preparation
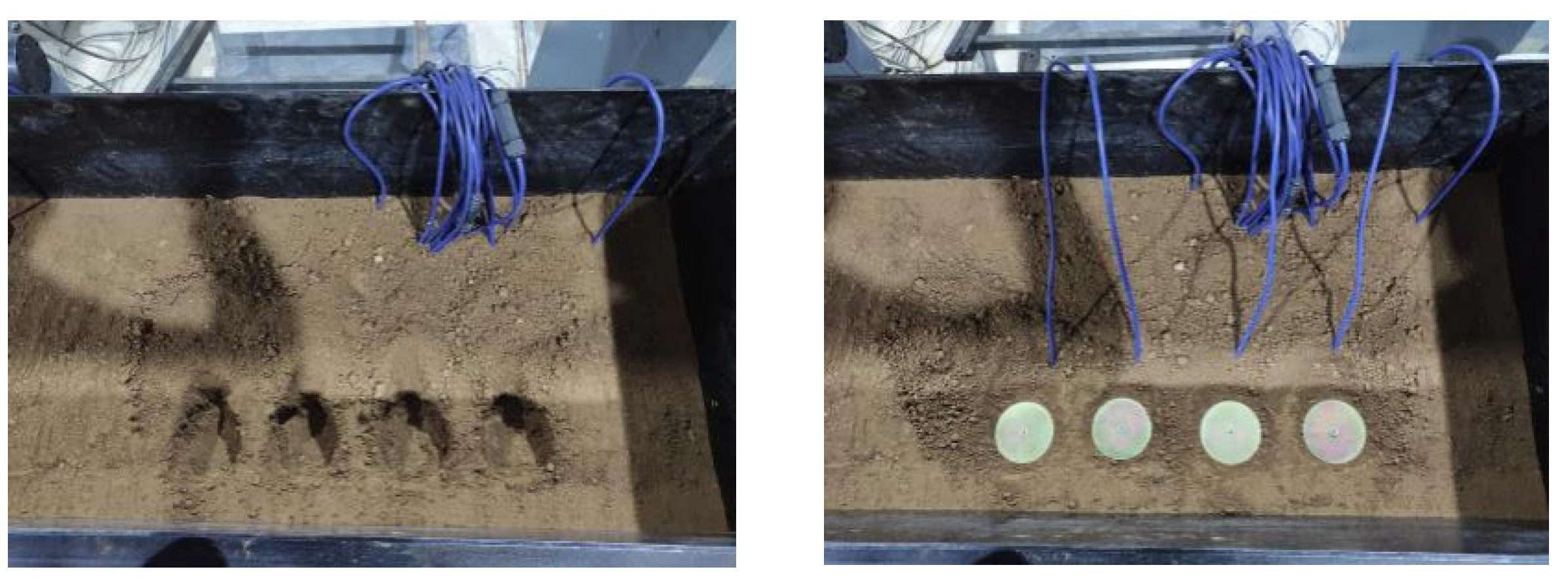
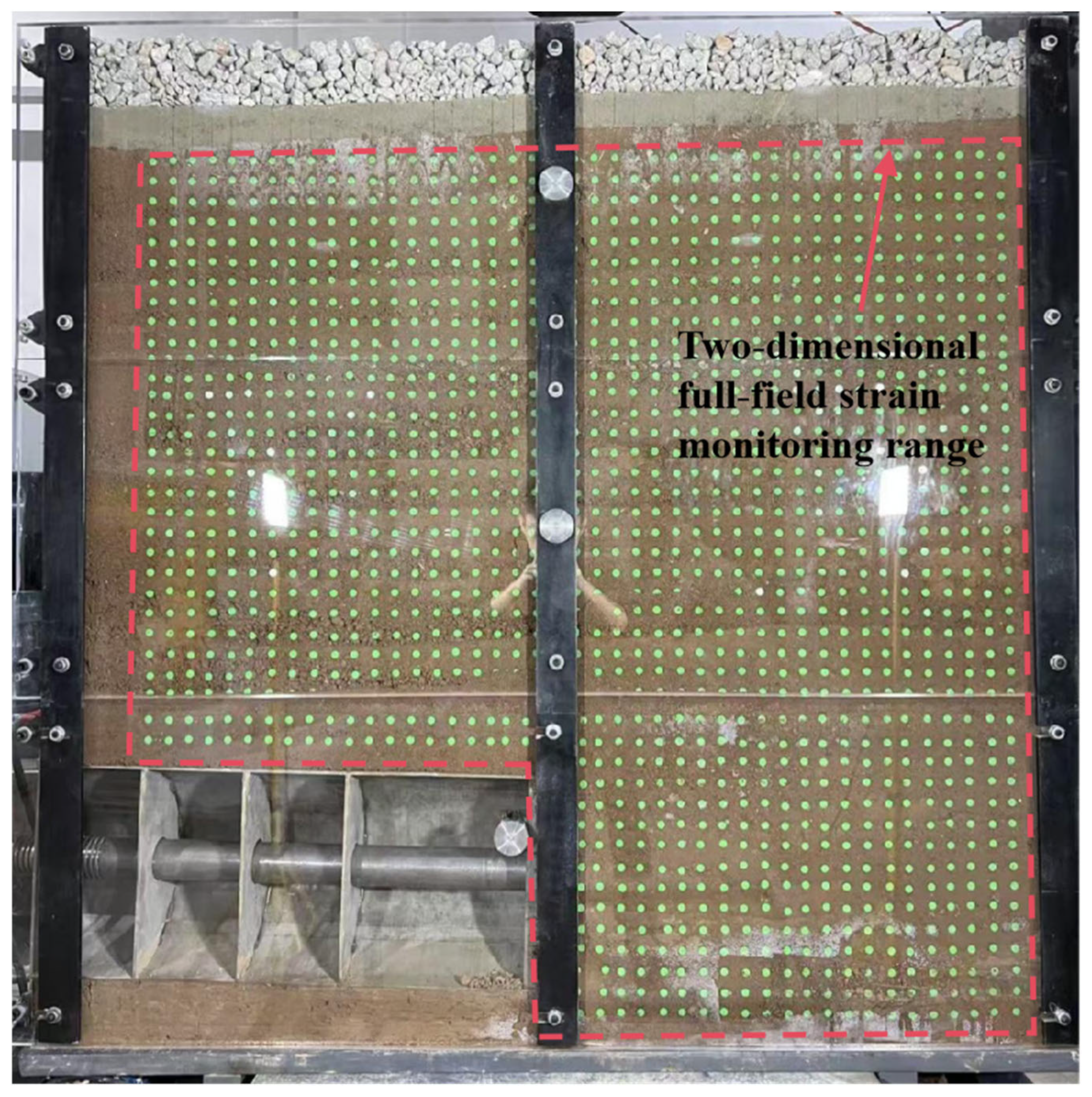
In the process of the layered filling test model, each layer of the 10 cm soil layer was left standing for 24 h to ensure that each layer had initially settled fully under the action of its own weight, and then the next layer of soil sample was filled. Considering that the test model box was assembled using three layers of enclosure, when the soil layer was filled to a height of 50 cm, the rigid enclosure was removed, and green pushpins were used to make speckle. The pushpins were driven into the soil layer surface, and then the prepared plexiglass was installed on the model box; the next layer of the soil layer was filled by repeating the above steps. The final test model is shown in
Figure 13. During the soil-filling process, we buried the prepared earth pressure box at a predetermined position according to the test plan, as shown in
Figure 14. After the soil layer filling was completed, the prepared cement soil and gravel were filled on top of the soil sample, and the prepared test model is shown in
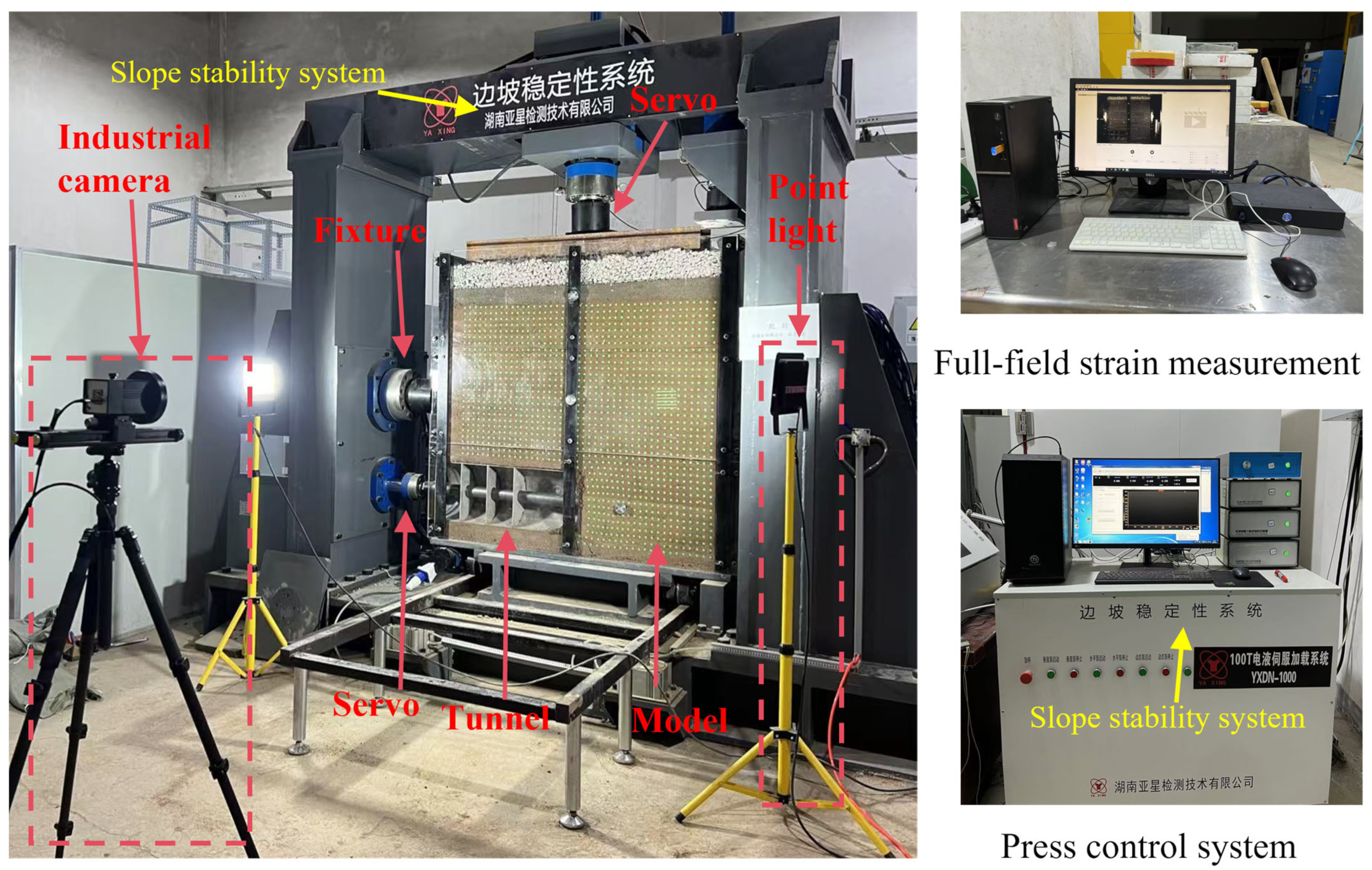
Figure 15. After the scaled test model was prepared, the soil sample was transported to the indicated position using the trolley of the slope stability system, and the 2D full-field strain measurement system and earth pressure box were connected with the corresponding control hardware. All the test equipment was debugged, slope stability system loading and test data-monitoring performance were debugged under no-load conditions, and the loading path was set.
Figure 16 shows the equipment layout of the tunnel scaling test site after the final debugging of data-monitoring performance and data-monitoring settings for the 2D full-field strain measurement system and earth pressure box.
- (2)
Shield and train vibration simulation
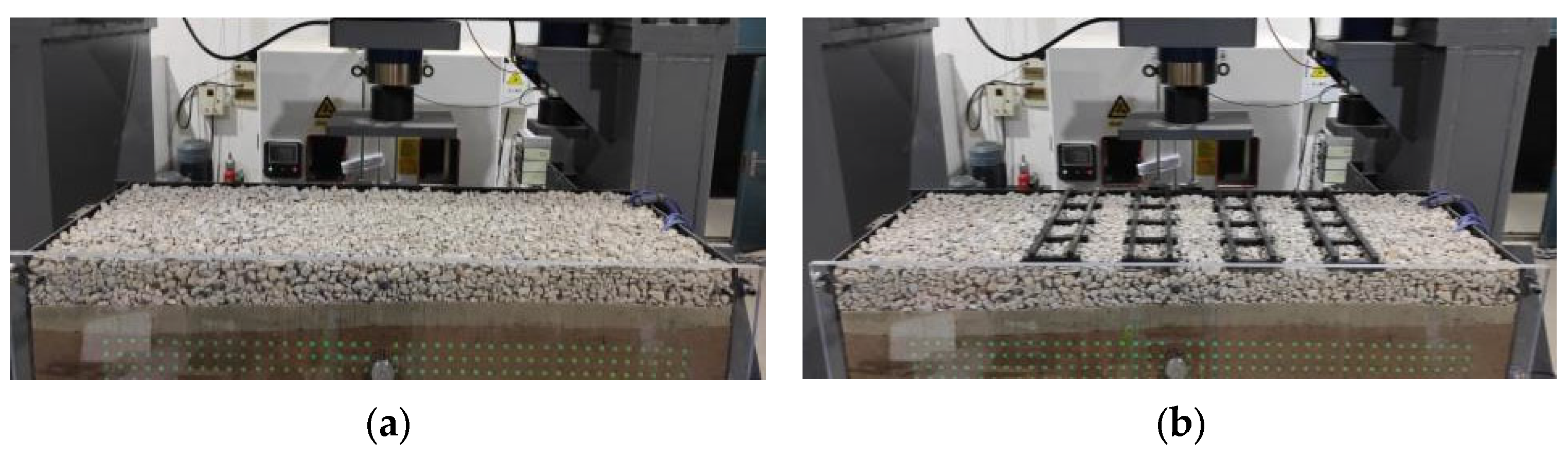
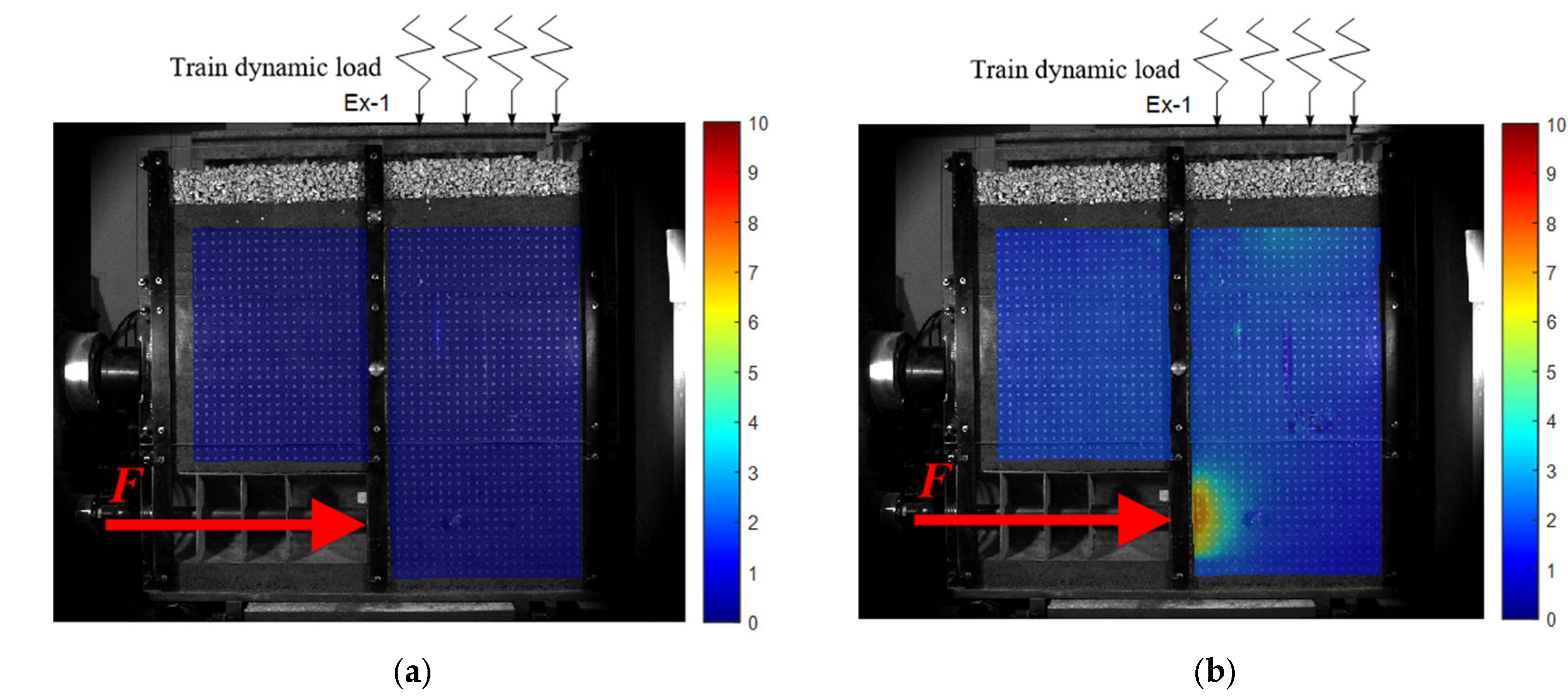
In order to simulate the deformation and load of the tunnel face and overlying strata during shield tunneling without and with trains, two test conditions were determined in this scaled test: The first is the case of no train vibration load, meaning there is no load on the upper part of the test model, and only horizontal thrust is applied to the tunnel axis to simulate the influence of thrust during shield propulsion on tunnel face deformation and load distribution. The second is the case of train vibration load, meaning when simulated train vibration load is applied to the upper part of the test model, horizontal thrust is also applied to the tunnel axis, and the coupling effect of train vibration load and shield thrust on the tunnel face deformation and load distribution is simulated. In the first case, no rail model is arranged on the upper part of the test model, as shown in
Figure 17a; in the second case, a rail model of similar proportions is arranged on the upper part of the test model according to the rail distribution of Xulan high-speed railway (on-site), as shown in
Figure 17b.
- (3)
Load path determination
- (1)
Test condition 1: Loading path
For condition 1, there was no train load in the upper part of the test model, and only the stratum dead weight acted on the tunnel face during shield tunneling. Therefore, only the influence of the thrust along the water level on the tunnel face during shield tunneling was considered during the test. In the test process, the hydraulic servo actuator of the slope stability system pushes the force transfer rod of the tunnel mold and then acts on the tunnel face, and the pressure and deformation characteristics of the tunnel face and the overlying ground layer during the process of the horizontal servo actuator are monitored using the earth pressure box and the 2D full-field strain measurement system. In the simulated shield driving process, the horizontal servo actuator adopts displacement control square propulsion, and the propulsion rate is 0.02 mm/s. In the process of propulsion, the horizontal thrust recorded on the computer of the slope stability control system is observed in real time. When the thrust suddenly drops, it is considered that the tunnel face is completely destroyed; the test is stopped immediately, the horizontal servo actuator is withdrawn, and all monitoring data are saved.
Figure 18a shows the loading path of condition 1.
- (2)
Test condition 2: Load path
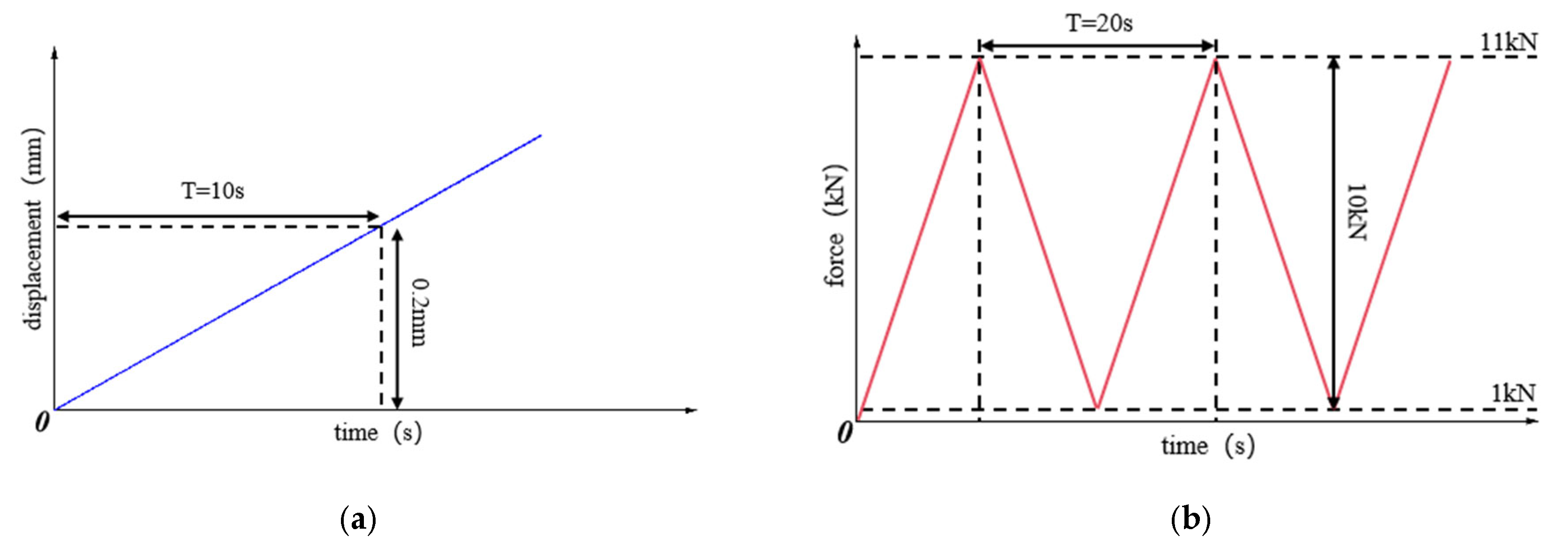
As for condition 2, the load of the Xulan high-speed railway train acted on the upper part of the test model, and the stratum dead weight during shield tunneling acted on the tunnel face. Therefore, the influence of horizontal thrust during shield tunneling and the passing load of a high-speed railway train on the tunnel face is taken into account during the test. During the test, the horizontal servo actuator of the slope stability system pushes the force transfer rod of the tunnel mold to act on the tunnel face, and the triangular waveform load is applied to the upper part of the test model through the vertical servo actuator to simulate the high-speed rail traffic load. The pressure and deformation characteristics of the tunnel face and overlying strata during horizontal servo actuator propulsion are monitored by the earth pressure box and the 2D full-field strain measurement system. In the simulated shield driving process, the hydraulic servo actuator adopts displacement control mode, and the advance rate is 0.02 mm/s. In the simulated train passing process, the vertical servo actuator adopts force control mode, and the loading rate is 1 kN/s, the maximum load is 11 kN, the minimum load is 1 kN, and the loading amplitude is 10 kN. The loading period is 20 s, and the loading frequency is 0.05 Hz. During the loading process of the horizontal servo actuator, the vertical servo actuator is loaded until the tunnel paw surface is stopped due to damage. The loading path of condition 2 is shown in
Figure 18a,b. In the process of propulsion, the horizontal thrust recorded on the computer of the slope stability control system is observed in real time. When the thrust suddenly drops, it is considered that the tunnel face is completely destroyed; the test is stopped immediately, the horizontal and vertical servo actuators are withdrawn, and all monitoring data are saved.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}