


Effect of Selected Optical Navigation Methods on the Energy Consumption of Automated Guided Vehicles




Abstract
1. Introduction
2. Materials and Methods
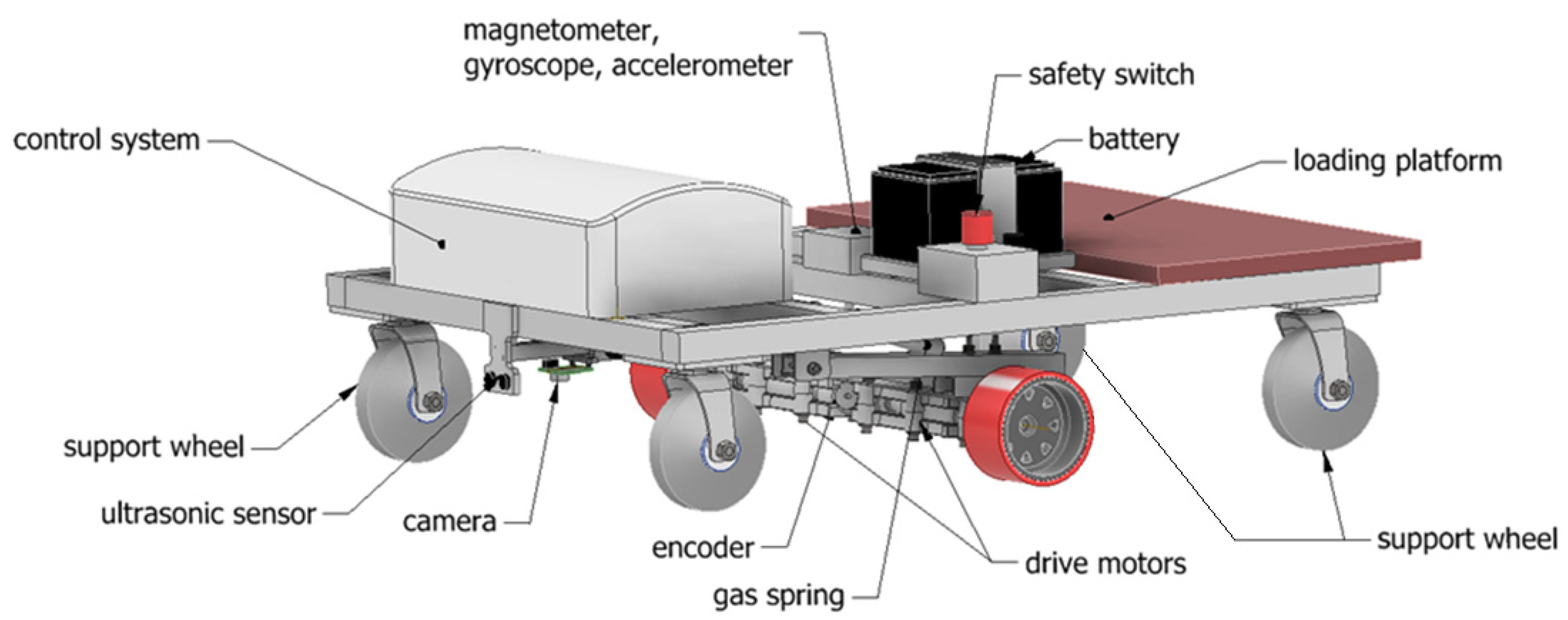
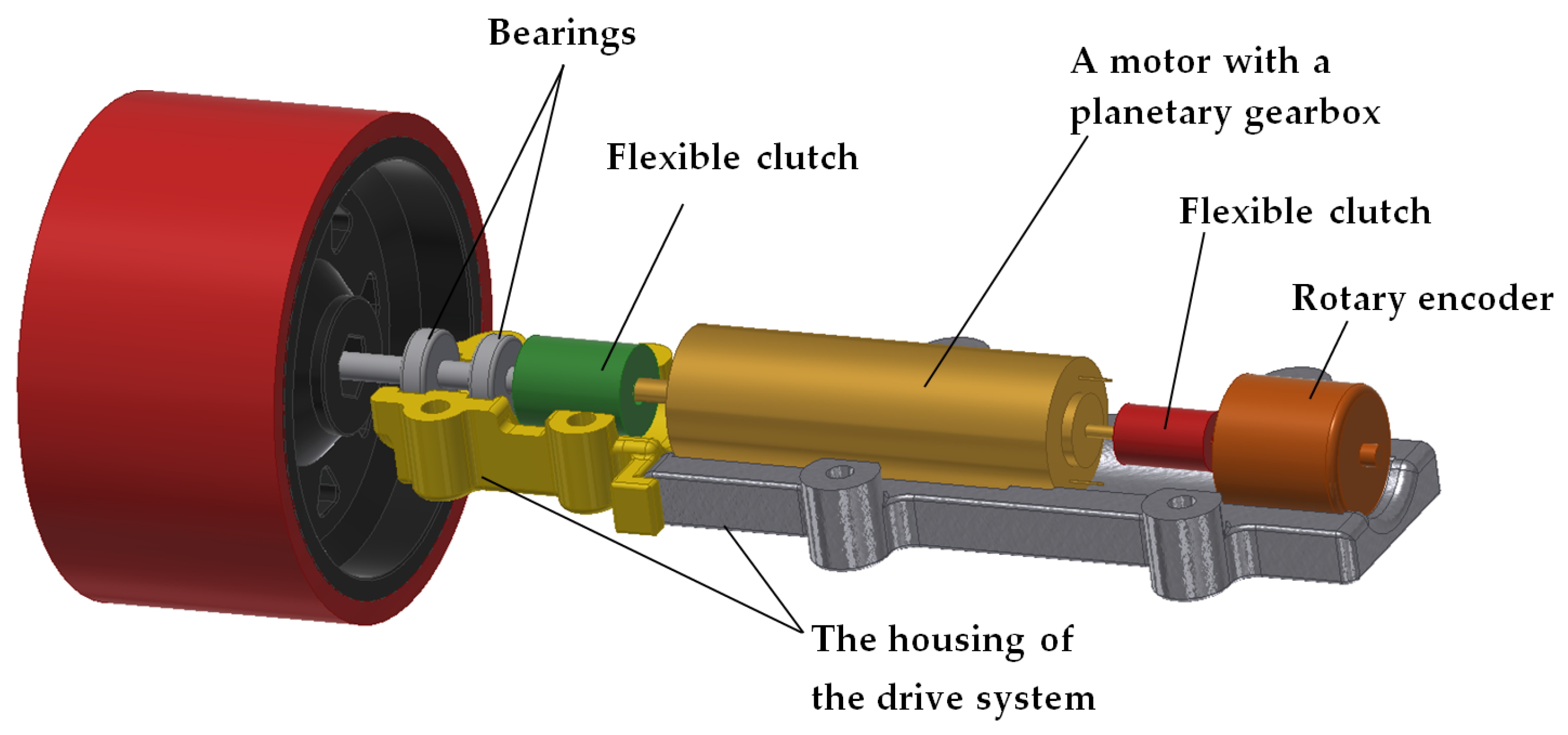
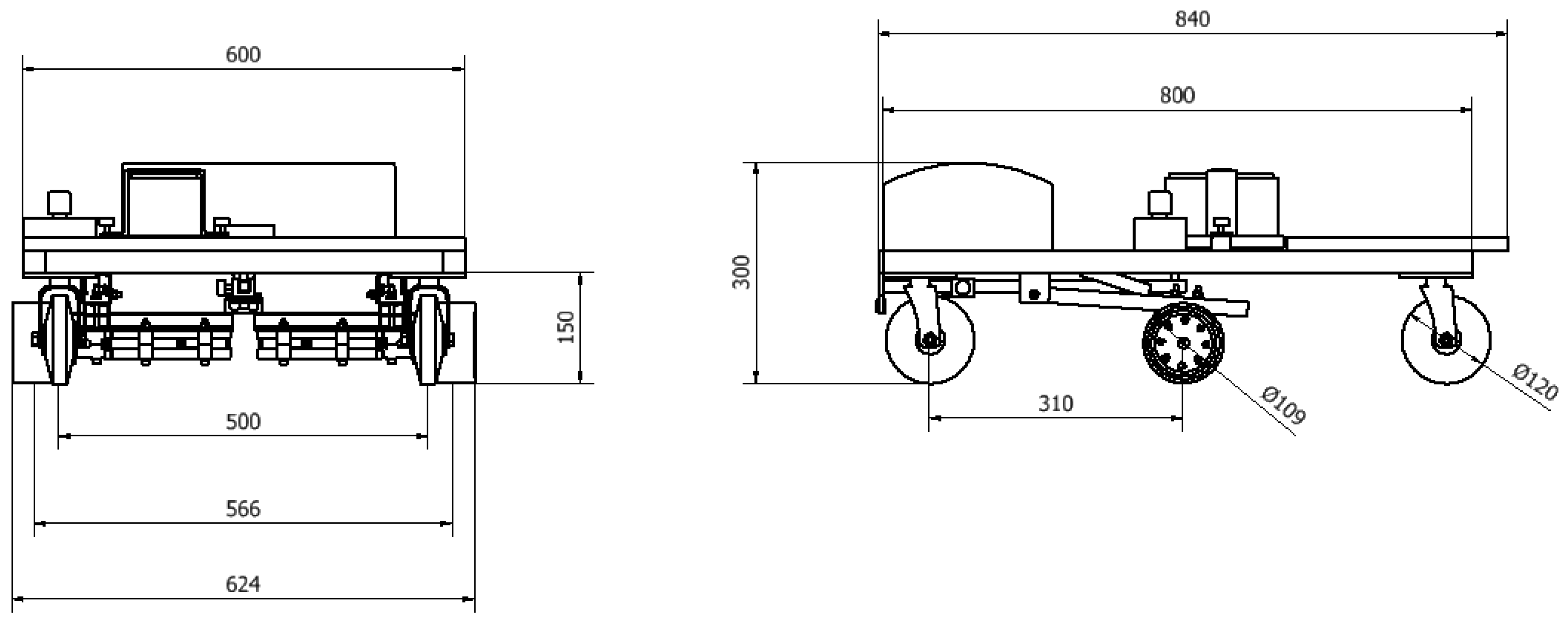
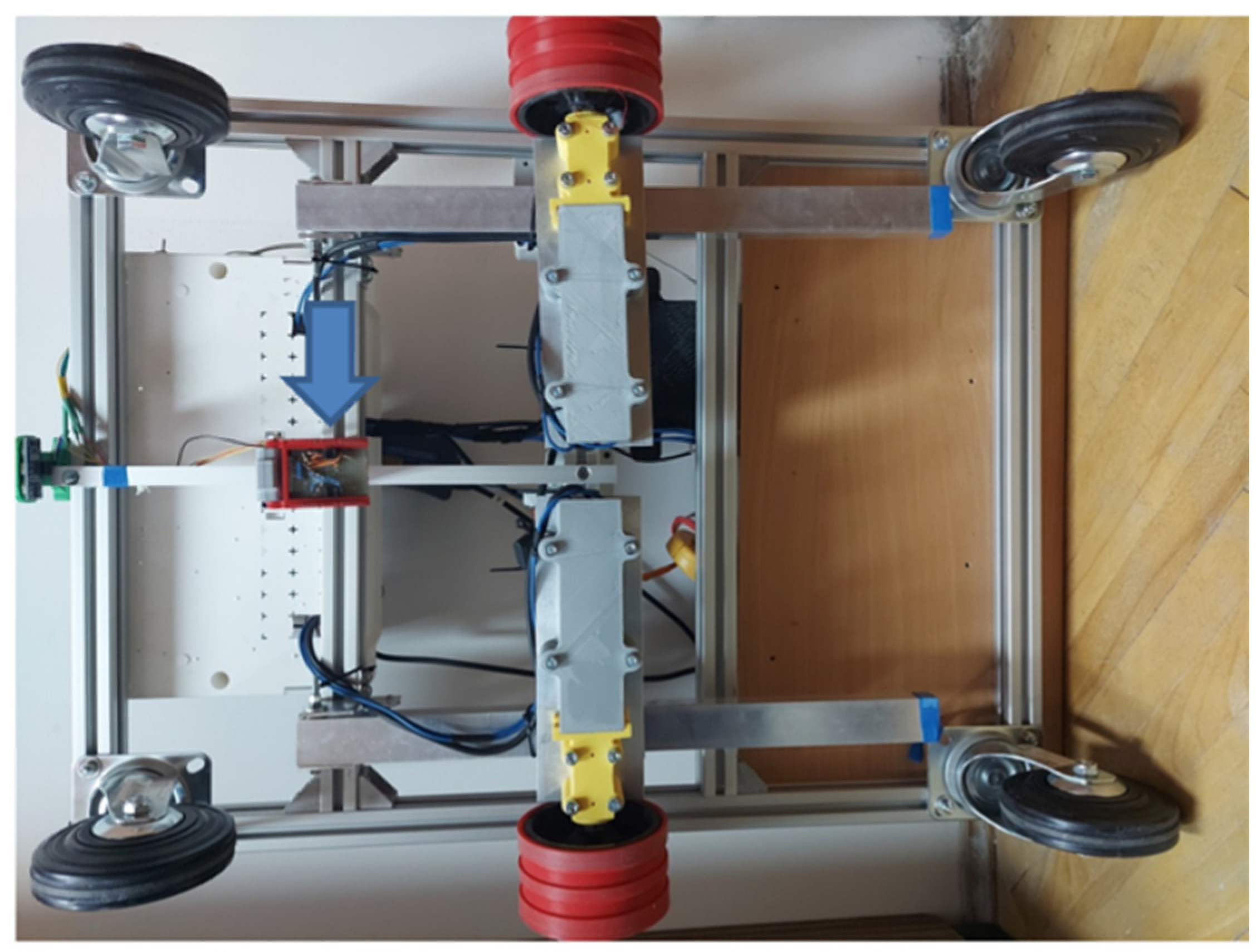
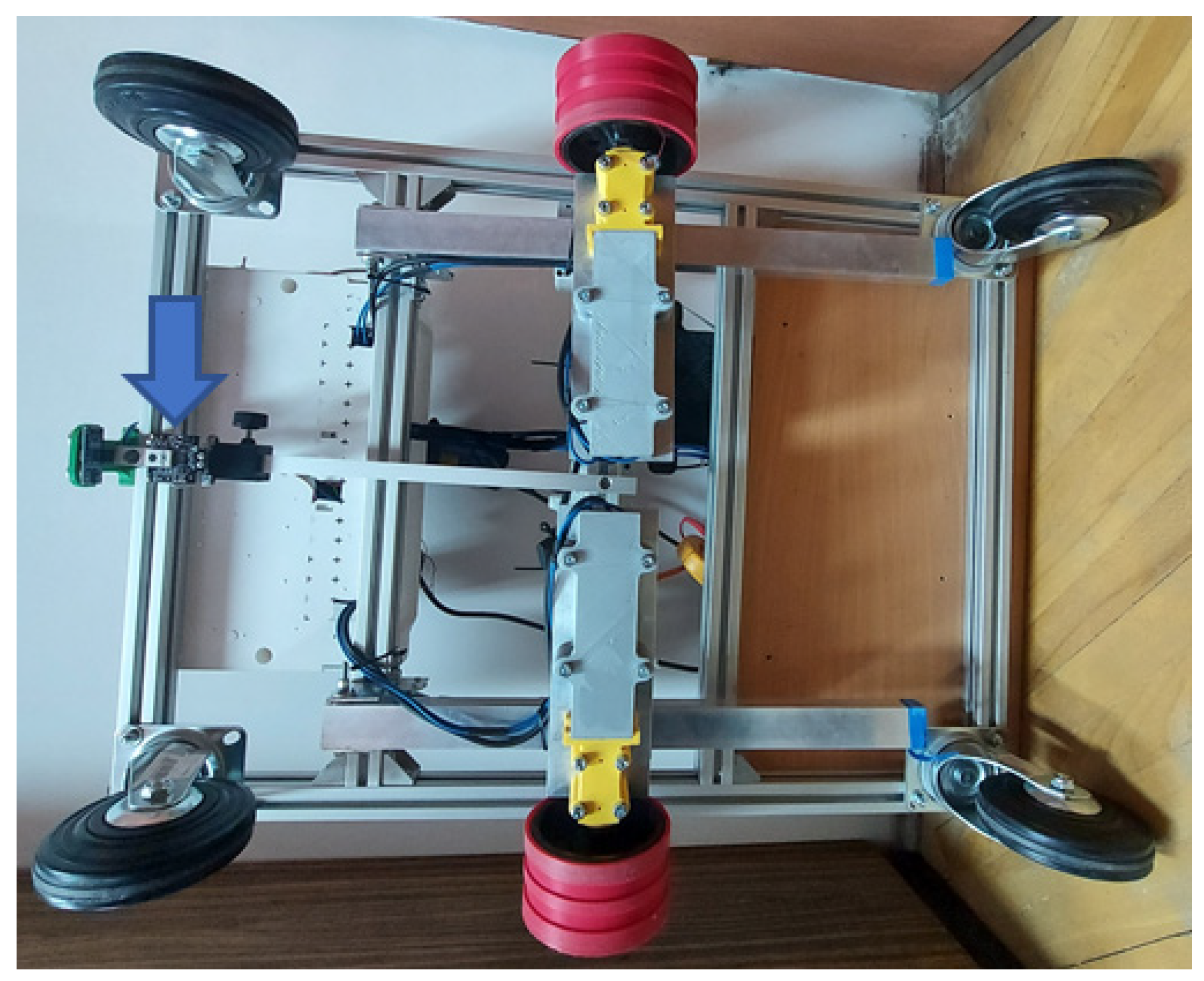
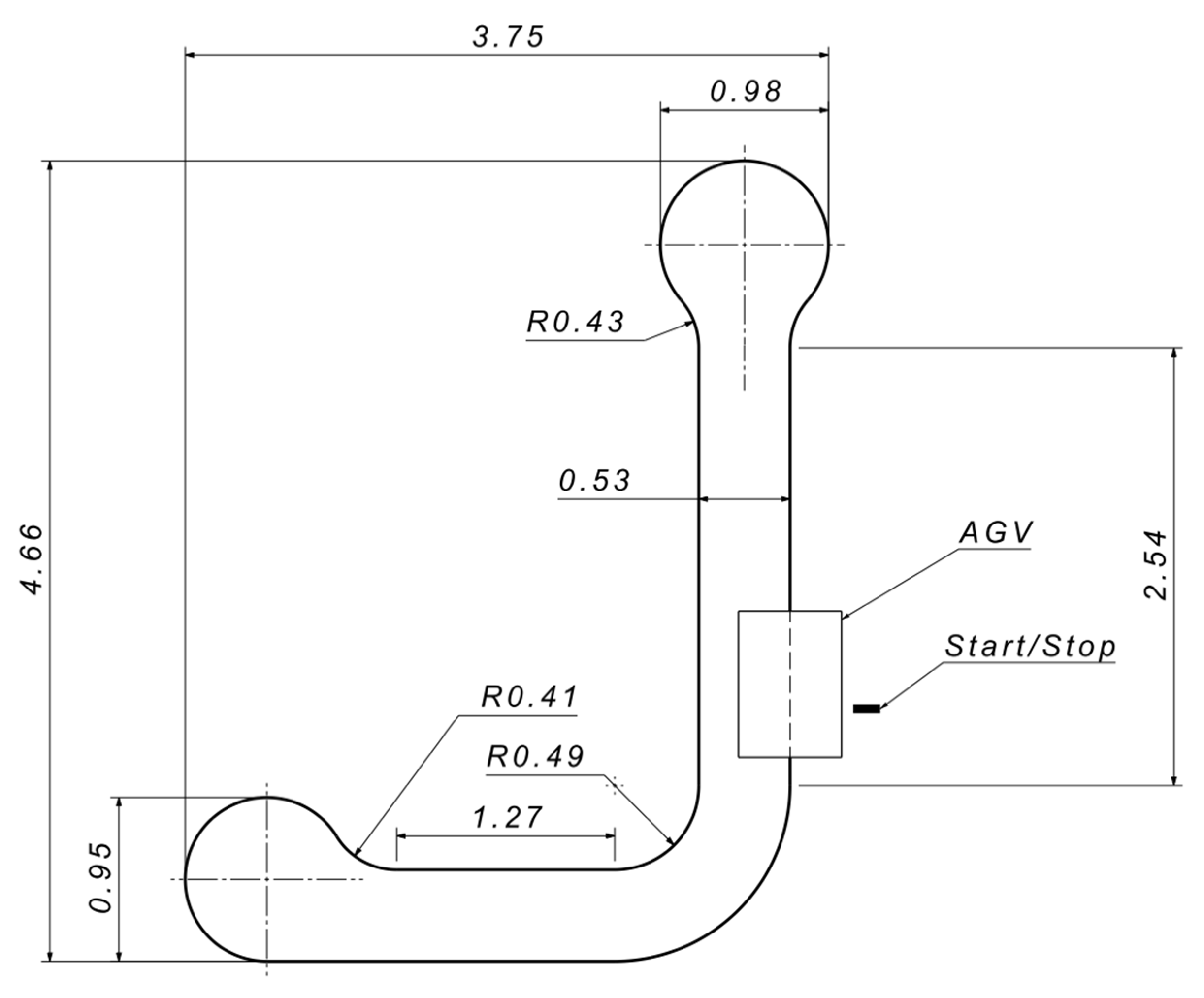
2.1. Technical Specification of the AGV
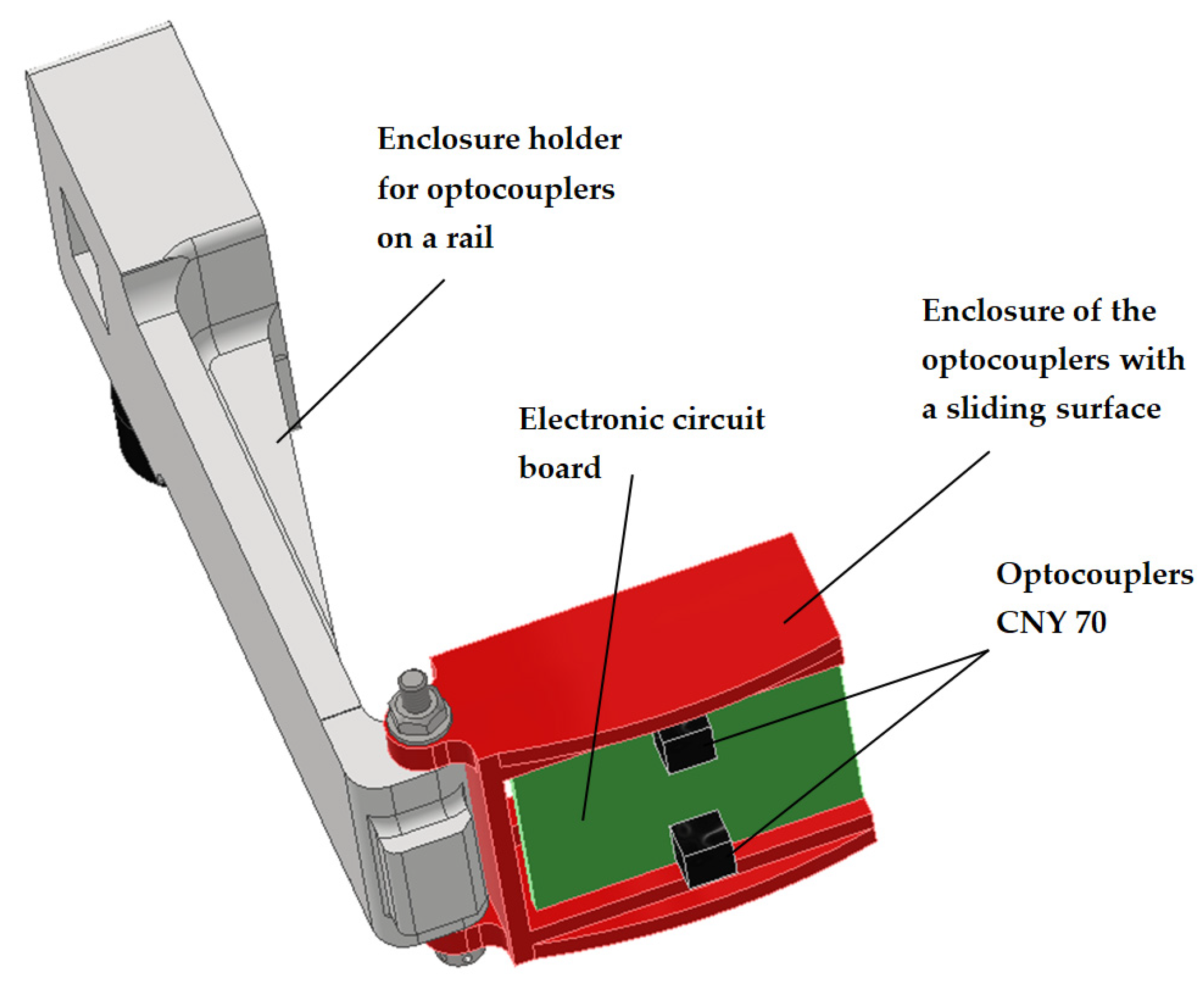
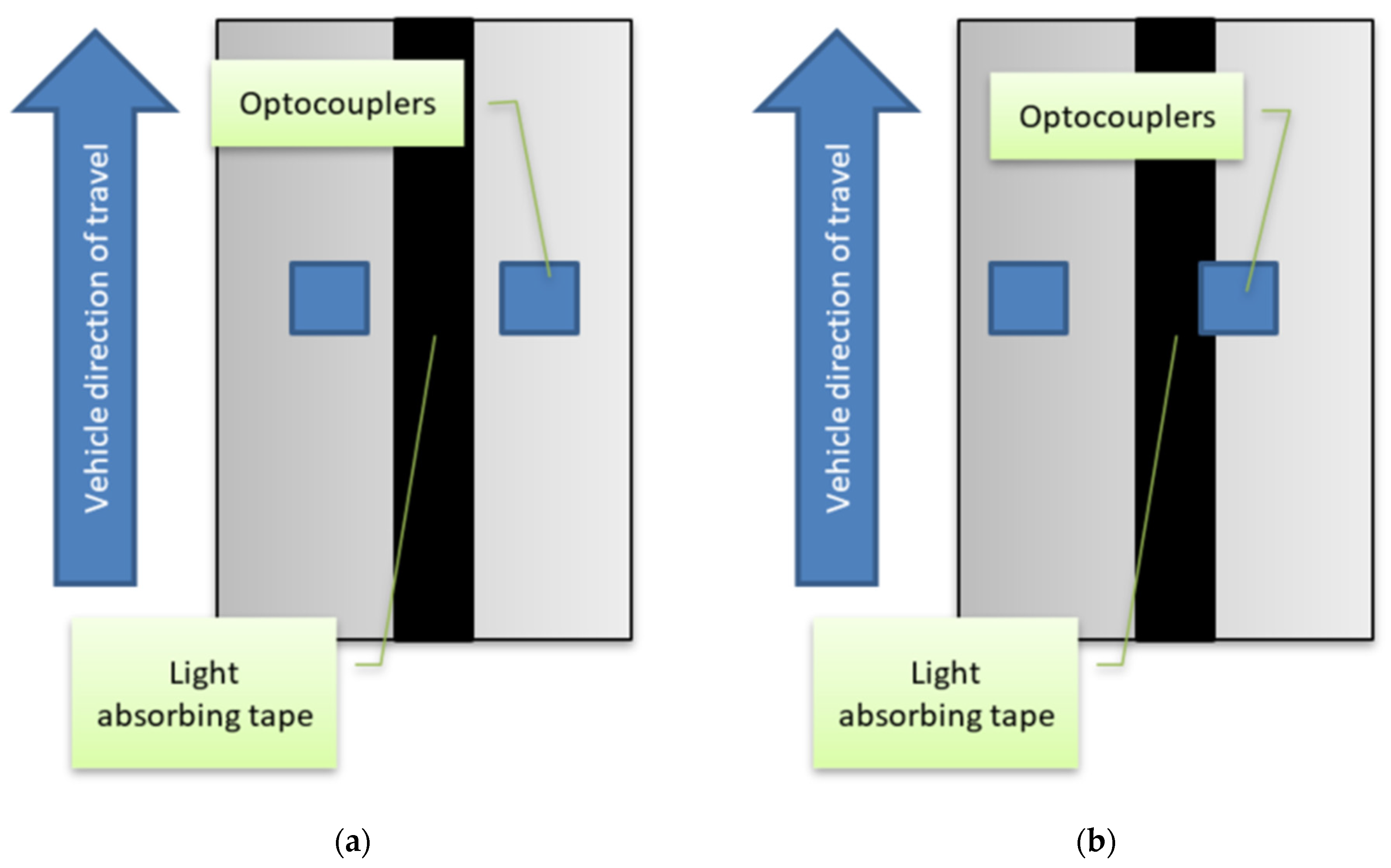
2.2. Analyzed Navigation Systems
- -
- Processor: NXP LPC4330, 204 MHz, dual-core;
- -
- Image Sensor: Aptina MT9M114, 1296 × 976 resolution with integrated image flow processor;
- -
- Lens Field-of-View: 60 degrees horizontal, 40 degrees vertical;
- -
- RAM: 264 KB;
- -
- Flash: 2 MB;
- -
- Available Data Outputs: UART serial, SPI, I2C, USB, digital, analog;
- -
- Integrated Light Source: Approximately 20 lumens;
- -
- Minimum Distance of the Camera Lens from the Object: 50 mm [34].
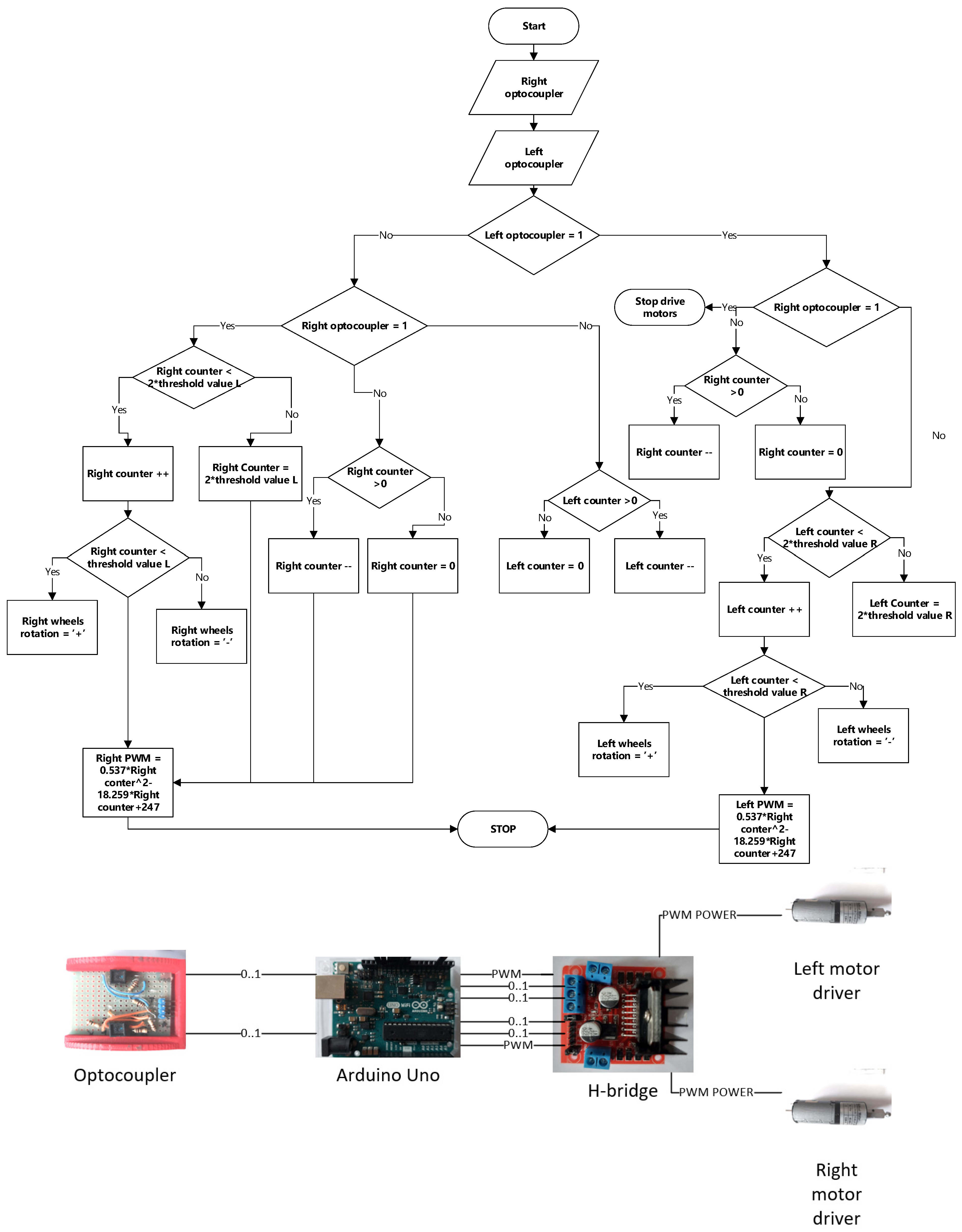
2.3. Control Algorithms
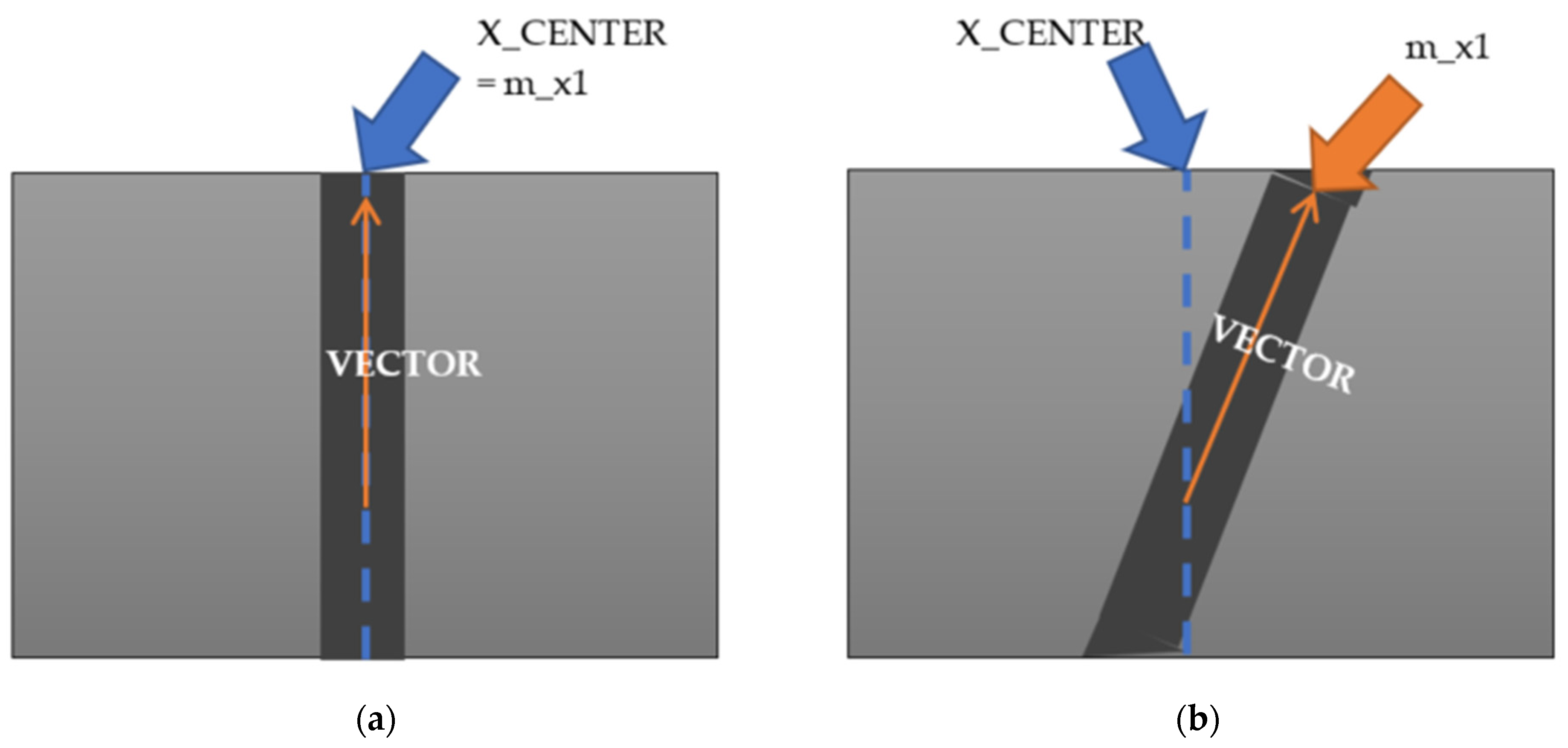
- m_x1—the x-coordinate of the end of the vector;
- X_CENTER—the x-coordinate of the screen center.
- error—error according to the Equation (1).
- PWM—filling of the speed control signal (0–255);
- counter—the quantized value of time.
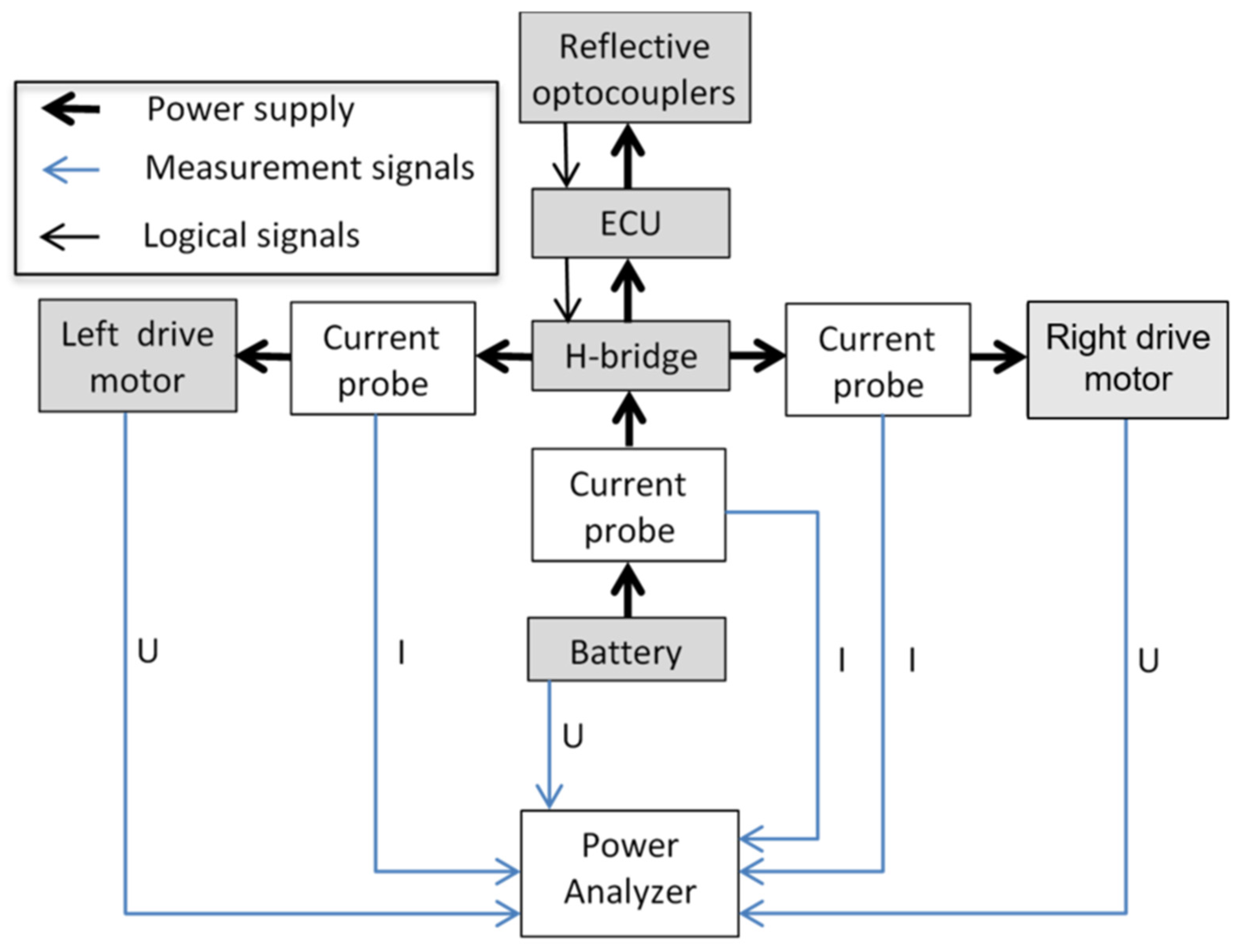
2.4. Research Procedure
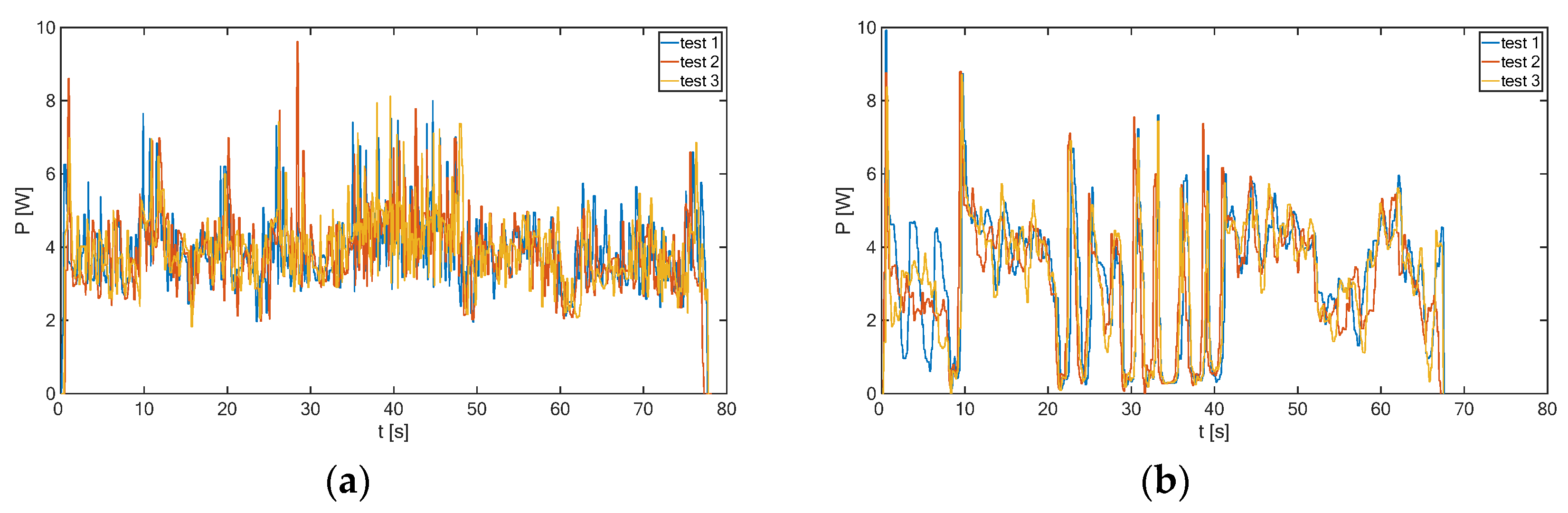
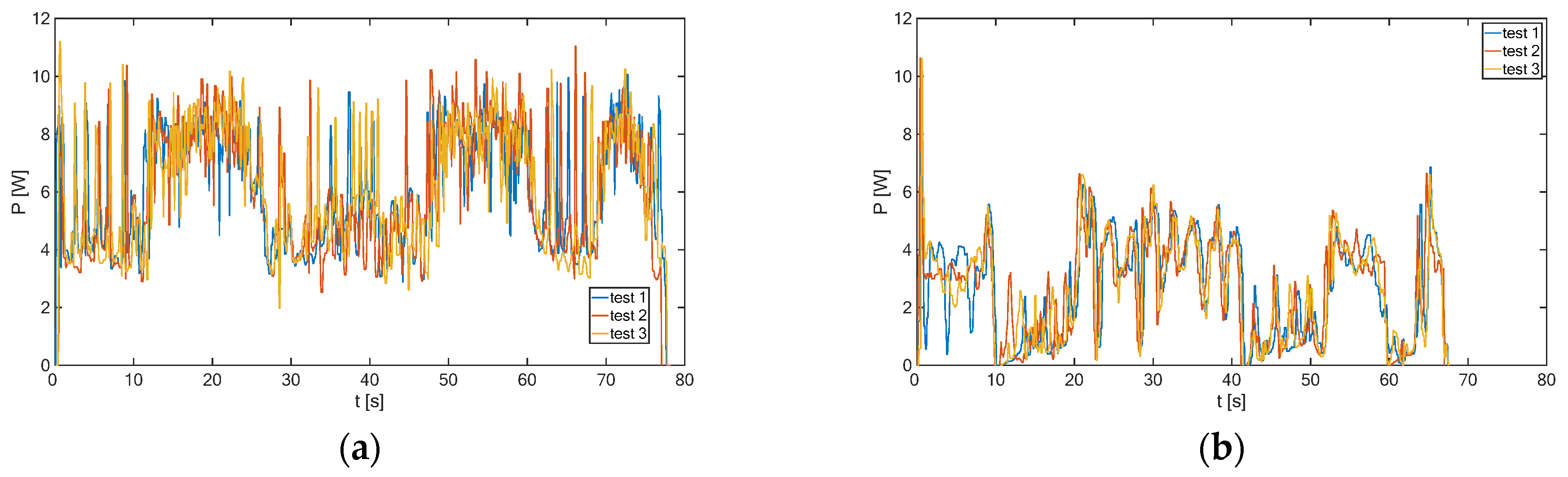
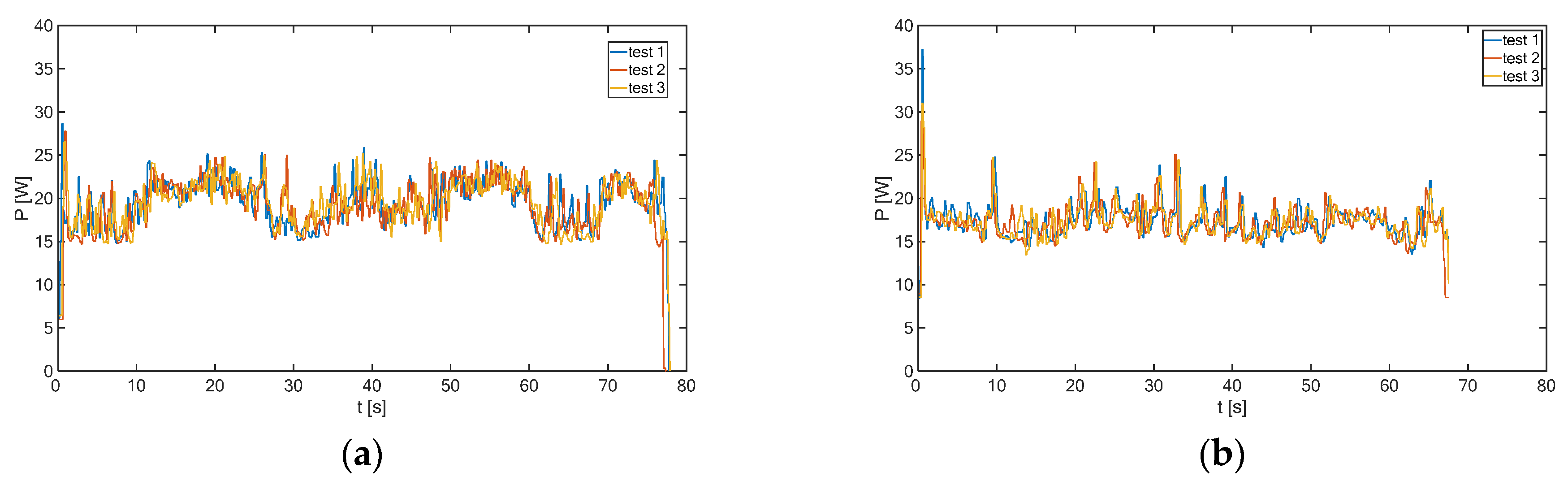
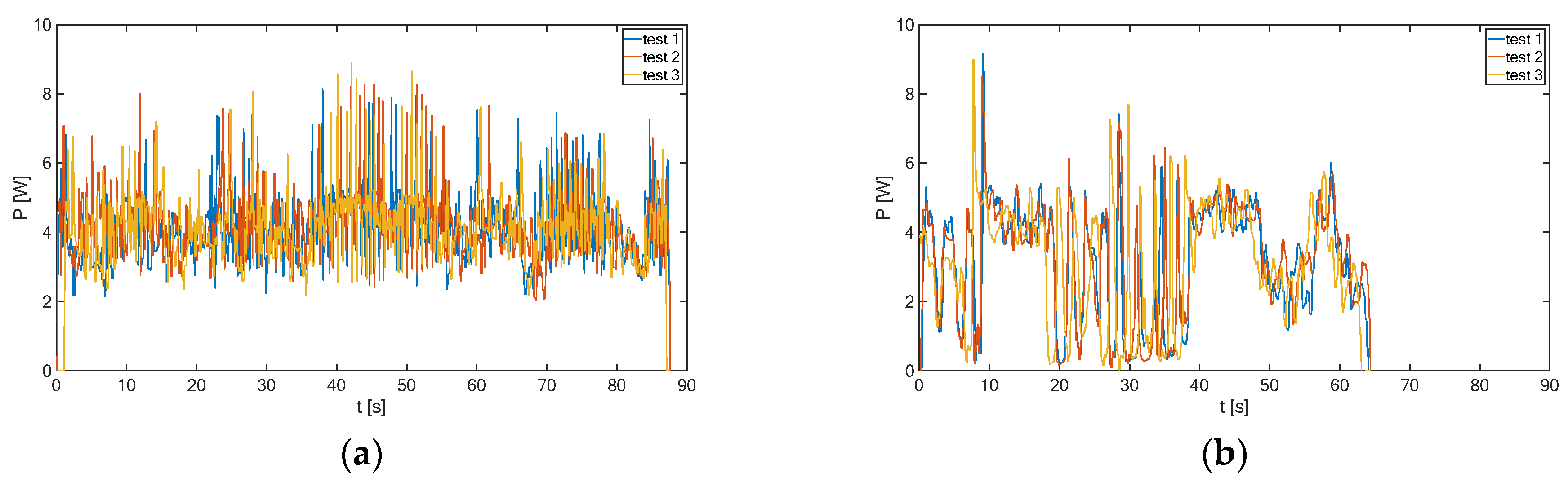
3. Results and Discussion
4. Conclusions
- -
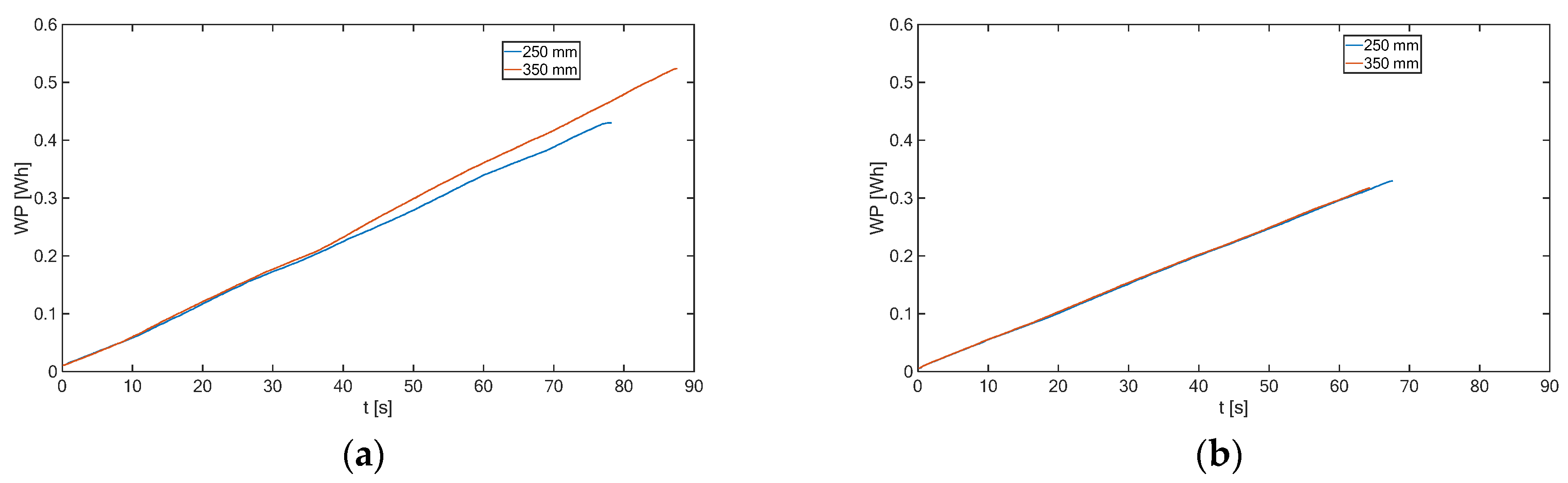
- The use of camera-based control allows for a reduction in transit time and lower energy consumption by the vehicle compared to a vehicle equipped with reflective optocouplers.
- -
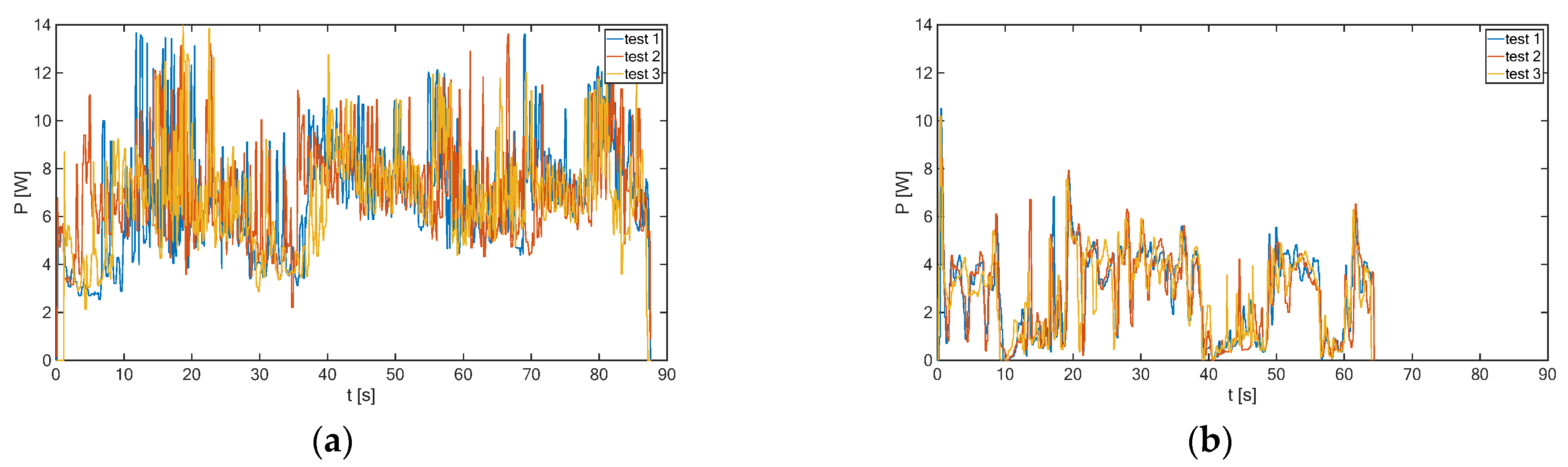
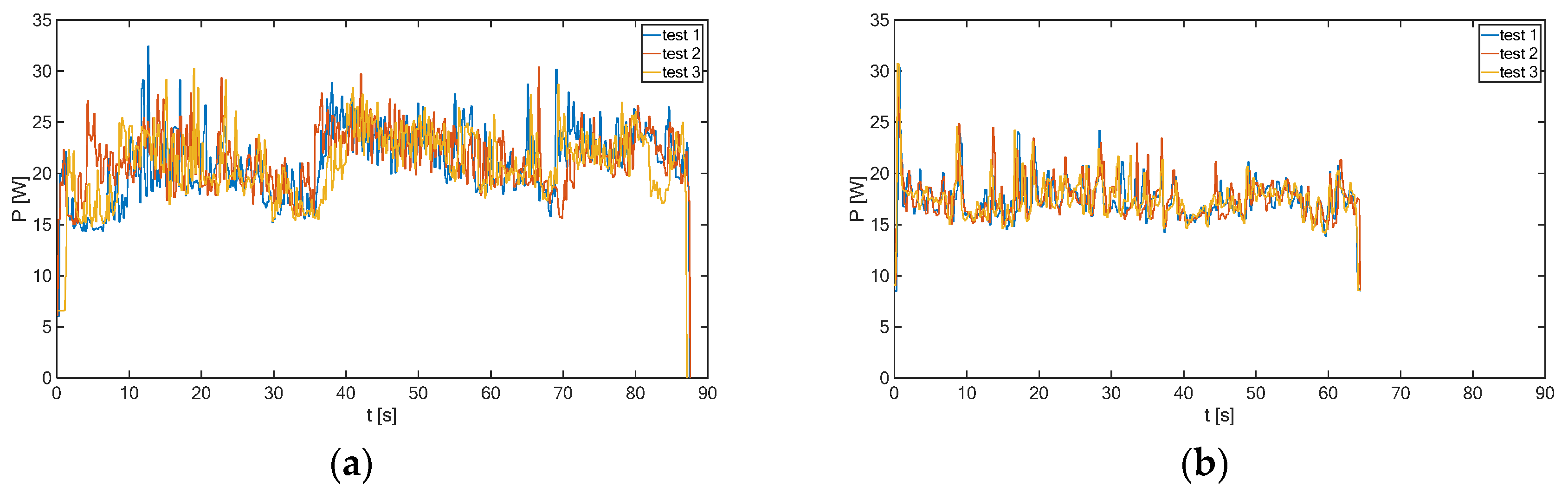
- The use of reflective optocouplers was associated with a greater dynamics of changes in the power values of the drive motors.
- -
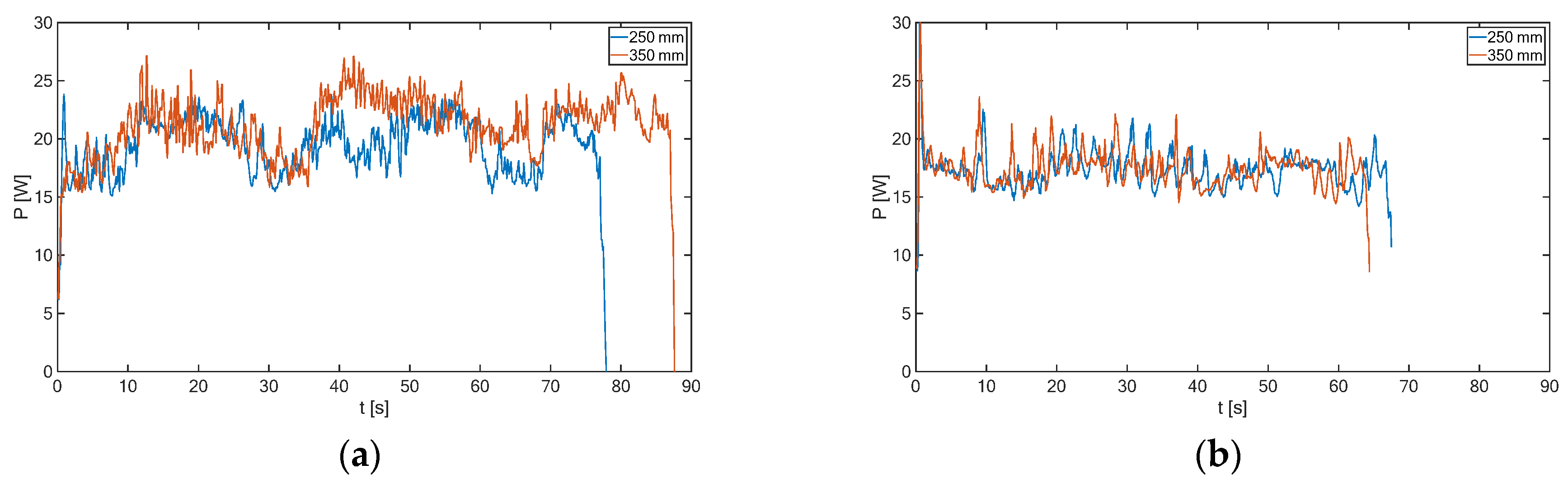
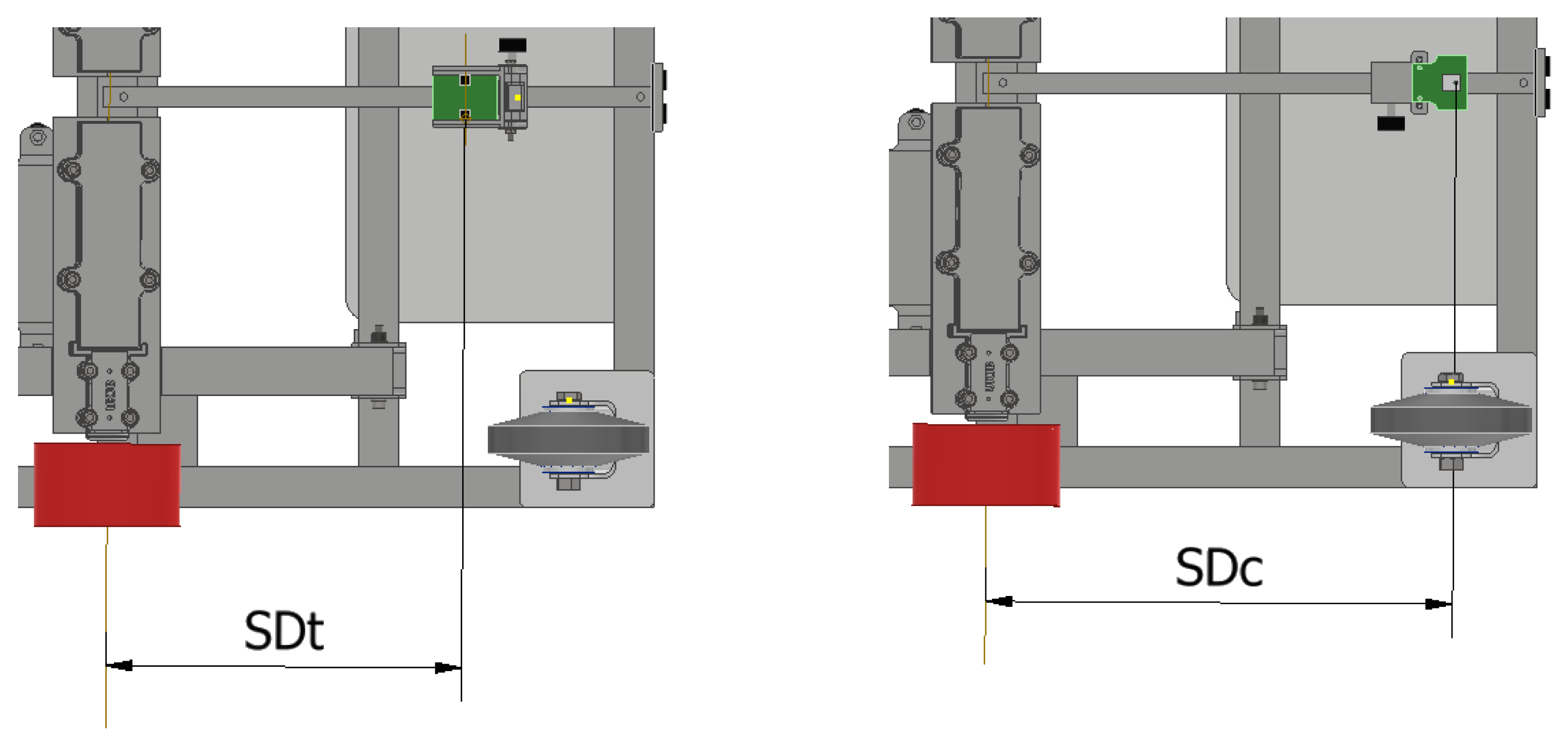
- The placement of the sensors affects operational parameters, such as energy consumption and transit time. These values were lower when using the camera for SDc = 350 mm, while for reflective optocouplers, lower values were achieved for SDt = 250 mm.
- -
- The smaller dynamics of changes in the vehicle’s direction of motion (smaller transverse oscillations) when using the camera resulted in lower energy consumption.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- IPCC. Global Warming of 1.5 °C. An IPCC Special Report on the Impacts of Global Warming of 1.5 °C Above Pre-Industrial Levels and Related Global Greenhouse Gas Emission Pathways, in the Context of Strengthening the Global Response to the Threat of Climate Change, Sustainable Development, and Efforts to Eradicate Poverty; Masson-Delmotte, V., Zhai, P., Pörtner, H.-O., Roberts, D., Skea, J., Shukla, P.R., Pirani, A., Moufouma-Okia, W., Péan, C., Pidcock, R., et al., Eds.; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2018; 616p. [Google Scholar] [CrossRef]
- Sankari, J.; Imtiaz, R. Automated guided vehicle(AGV) for industrial sector. In Proceedings of the 2016 10th International Conference on Intelligent Systems and Control (ISCO), Coimbatore, India, 7–8 January 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Han, Z. Research on logistics AGV vehicle path planning based on improved Q-learning algorithm. In Proceedings of the 2022 7th International Conference on Automation, Control and Robotics Engineering (CACRE), Xi’an, China, 14–16 July 2022; pp. 264–268. [Google Scholar] [CrossRef]
- Bi, X.; He, Q.; Li, Y.; Liu, G.; Li, X. AGV magnetic navigation unmanned vehicle handling wood automation. In Proceedings of the Third International Conference on Control and Intelligent Robotics (ICCIR 2023), Sipsongpanna, China, 30 June–2 July 2023; Volume 12940, p. 129400A. [Google Scholar] [CrossRef]
- Silvirianti, A.; Krisna, A.S.R.; Rusdinar, A.; Yuwono, S.; Nugraha, R. Speed control system design using fuzzy-PID for load variation of automated guided vehicle (AGV). In Proceedings of the 2017 2nd International Conference on Frontiers of Sensors Technologies (ICFST), Shenzhen, China, 14–16 April 2017; pp. 426–430. [Google Scholar] [CrossRef]
- Apsada, S.; Risfendra, R. Improving the Accuracy of Manual Control of an Automatic Guided Vehicle (AGV) Robot by Applying the Proportional Integral Derivative (PID) Algorithm. JTEIN J. Tek. Elektro Indones. 2024, 5, 343–354. [Google Scholar] [CrossRef]
- Baballe, M.A.; Adamu, A.I.; Bari, A.S.; Ibrahim, A. Principle Operation of a Line Follower Robot. J. Math. Tech. Comput. Math. 2023, 2, 211–215. [Google Scholar]
- Puppim de Oliveira, D.; Pereira Neves dos Reis, W.; Morandin Junior, O. A Qualitative Analysis of a USB Camera for AGV Control. Sensors 2019, 19, 4111. [Google Scholar] [CrossRef] [PubMed]
- Zheng, Z.; Lu, Y. Research on AGV trackless guidance technology based on the global vision. Sci. Prog. 2022, 105, 00368504221103766. [Google Scholar] [CrossRef]
- Baras, N.; Nantzios, G.; Ziouzios, D.; Dasygenis, M. Autonomous Obstacle Avoidance Vehicle Using LIDAR and an Embedded System. In Proceedings of the 2019 8th International Conference on Modern Circuits and Systems Technologies (MOCAST), Thessaloniki, Greece, 13–15 May 2019. [Google Scholar]
- Varagul, J.; Ito, T. Simulation of Detecting Function object for AGV Using Computer Vision with Neural Network. Procedia Comput. Sci. 2016, 96, 159–168. [Google Scholar] [CrossRef]
- Li, Y.; Liu, L. Physics-Informed Neural Network-Based Nonlinear Model Predictive Control for Automated Guided Vehicle Trajectory Tracking. World Electr. Veh. J. 2024, 15, 460. [Google Scholar] [CrossRef]
- Grigorescu, S.; Ginerica, C.; Zaha, M.; Macesanu, G.; Trasnea, B. LVD-NMPC: A learning-based vision dynamics approach to nonlinear model predictive control for autonomous vehicles. Int. J. Adv. Robot. Syst. 2021, 18. [Google Scholar] [CrossRef]
- Wu, X.; Sun, C.; Zou, T.; Xiao, H.; Wang, L.; Zhai, J. Intelligent Path Recognition against Image Noises for Vision Guidance of Automated Guided Vehicles in a Complex Workspace. Appl. Sci. 2019, 9, 4108. [Google Scholar] [CrossRef]
- Zhang, H.; Xu, L.; Liang, J.; Sun, X. Research on Guide Line Identification and Lateral Motion Control of AGV in Complex Environments. Machines 2022, 10, 121. [Google Scholar] [CrossRef]
- Kim, S.H.; Park, K.S. A Study on Navigation Sensor System for Outdoor AGV Using AMR Sensors. J. Control Autom. Syst. Eng. 2003, 9, 140–146. [Google Scholar] [CrossRef]
- Manikandan, S.; Kaliyaperumal, G.; Hakak, S.; Gadekallu, T.R. Curve-Aware Model Predictive Control (C-MPC) Trajectory Tracking for Automated Guided Vehicle (AGV) over On-Road, In-Door, and Agricultural-Land. Sustainability 2022, 14, 12021. [Google Scholar] [CrossRef]
- Yang, X.; Hu, H.; Cheng, C.; Wang, Y. Automated Guided Vehicle (AGV) Scheduling in Automated Container Terminals (ACTs) Focusing on Battery Swapping and Speed Control. J. Mar. Sci. Eng. 2023, 11, 1852. [Google Scholar] [CrossRef]
- Jang, J.-Y.; Yoon, S.-J.; Lin, C.-H. Automated Guided Vehicle (AGV) Driving System Using Vision Sensor and Color Code. Electronics 2023, 12, 1415. [Google Scholar] [CrossRef]
- Hu, X.; Luo, Z.; Jiang, W. AGV Localization System Based on Ultra-Wideband and Vision Guidance. Electronics 2020, 9, 448. [Google Scholar] [CrossRef]
- Lee, J.; Hyun, C.-H.; Park, M. A Vision-Based Automated Guided Vehicle System with Marker Recognition for Indoor Use. Sensors 2013, 13, 10052–10073. [Google Scholar] [CrossRef]
- Kotze, B.; Jordaan, G. Investigation of Matlab® as Platform in Navigation and Control of an Automatic Guided Vehicle Utilising an Omnivision Sensor. Sensors 2014, 14, 15669–15686. [Google Scholar] [CrossRef] [PubMed]
- Budzan, S.; Wyżgolik, R.; Kciuk, M.; Kulik, K.; Masłowski, R.; Ptasiński, W.; Szkurłat, O.; Szwedka, M.; Woźniak, Ł. Using Gesture Recognition for AGV Control: Preliminary Research. Sensors 2023, 23, 3109. [Google Scholar] [CrossRef]
- Ho, Y.-C.; Liao, T.-W. Zone design and control for vehicle collision prevention and load balancing in a zone control AGV system. Comput. Ind. Eng. 2009, 56, 417–432. [Google Scholar] [CrossRef]
- Pires, M.; Couto, P.; Santos, A.; Filipe, V. Obstacle Detection for Autonomous Guided Vehicles through Point Cloud Clustering Using Depth Data. Machines 2022, 10, 332. [Google Scholar] [CrossRef]
- Li, Q.; Pogromsky, A.; Adriaansen, T.; Udding, J.T. A Control of Collision and Deadlock Avoidance for Automated Guided Vehicles with a Fault-Tolerance Capability. Int. J. Adv. Robot. Syst. 2016, 13, 64. [Google Scholar] [CrossRef]
- Zhang, T.; Xu, M.; Ma, Z.; Ma, F.; Yu, L. A scheduling optimization method for multiple automated guided vehicle systems. Int. J. Adv. Robot. Syst. 2024, 21, 17298806241246888. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, Y.; Su, Z. A novel scheduling method for automated guided vehicles in workshop environments. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419844152. [Google Scholar] [CrossRef]
- Głębocki, R.; Zasuwa, M.; Świętoń, G. Visual navigation for autonomous land vehicle. Pomiary Autom. Robot. 2010, 2, 45–50. [Google Scholar]
- Głębocki, R.; Świętoń, G. Some aspects of control and navigation system for autonomous UGV. Pomiary Autom. Robot. 2011, 2, 23–30. [Google Scholar]
- Shen, W.; Wu, D. Path planning of an AGV based on artificial potential field and model predictive control. In Proceedings of the 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; pp. 6925–6930. [Google Scholar] [CrossRef]
- Reflective Optical Sensor with Transistor Output. Available online: https://www.vishay.com/docs/83751/cny70.pdf (accessed on 17 January 2025).
- Pixy 2 CMUcam5 Smart Vision Sensor. Available online: https://media.digikey.com/pdf/Data%20Sheets/Seeed%20Technology/102991074_Web.pdf (accessed on 19 January 2025).
- PIXY Documentation. Available online: https://docs.pixycam.com/wiki/doku.php?id=wiki:v2:what_is_the_maximum_distance_that_pixy_can_detect_objects (accessed on 16 January 2025).
- PIXY Documentation. Available online: https://pixycam.com/downloads-pixy1/ (accessed on 4 May 2024).
- Hioki. Power Meters/Power Analyzer. Available online: https://www.hioki.com/euro-en/products/power-meters/power-analyzer/id_5964 (accessed on 4 May 2024).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Setting |
|---|---|
| Auto exposure correction | On |
| Auto white balance | On |
| Auto white balance on power-up | On |
| Flicker avoidance | On |
| Min frames per second | 61 |
| Tuning | |
| Edge threshold | 29 |
| Maximum line width | 210 |
| Minimum line width | 59 |
| White line | Off |
| Camera brightness | 36 |
| Expert | |
| Edge distance | 7 |
| Line extraction distance | 3 |
| Maximum line compare | 2480 |
| Maximum merge distance | 10 |
| Minimum line length | 16 |
| Line filtering | 27 |
| Intersection filtering | 5 |
| Barcode filtering | 0 |
| Default turn angle | 0 |
| Delayed turn | Off |
| Manual vector select | Off |
| Default program | Line tracking |
| Program select on power-up | Off |
| Debug | 0 |
| Apparatus | DC Power Accuracy (±% of Reading ± % of Full Scale) |
|---|---|
| Power analyzer HIOKI PW 3390 | ±0.05% rdg. ± 0.07% f.s. |
| Current probe HIOKI CT6843A | ±0.20% rdg. ± 0.02% f.s. |
| Total accuracy | ±0.25% rdg. ± 0.47% f.s. |
| Sensor Type | Distance of the Sensor from the Drive Axis [mm] | Test No. | Energy Consumption [Wh] | Average Energy Consumption [Wh] | Transit Time [s] | Average Transit Time [s] | Average Speed for Test [m/s] | Average Speed [m/s] |
|---|---|---|---|---|---|---|---|---|
| Reflective optocouplers | 250 | 1 | 0.430 | 0.429 (0.007) | 77.8 | 77.7 (0.5) | 0.21 | 0.21 |
| 2 | 0.425 | 77.4 | 0.21 | |||||
| 3 | 0.432 | 77.9 | 0.21 | |||||
| 350 | 1 | 0.523 | 0.524 (0.017) | 87.5 | 87.4 (0.5) | 0.18 | 0.18 | |
| 2 | 0.533 | 87.6 | 0.18 | |||||
| 3 | 0.515 | 87.1 | 0.18 | |||||
| Camera | 250 | 1 | 0.331 | 0.330 (0.002) | 67.5 | 67.4 (0.4) | 0.24 | 0.24 |
| 2 | 0.329 | 67.1 | 0.24 | |||||
| 3 | 0.329 | 67.5 | 0.24 | |||||
| 350 | 1 | 0.317 | 0.317 (0.002) | 64.2 | 64.2 (1.3) | 0.25 | 0.25 | |
| 2 | 0.319 | 64.4 | 0.25 | |||||
| 3 | 0.317 | 64.1 | 0.25 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Balawender, K.; Jaworski, A.; Jakubowski, M.; Kuszewski, H. Effect of Selected Optical Navigation Methods on the Energy Consumption of Automated Guided Vehicles. Appl. Sci. 2025, 15, 2494. https://doi.org/10.3390/app15052494
Balawender K, Jaworski A, Jakubowski M, Kuszewski H. Effect of Selected Optical Navigation Methods on the Energy Consumption of Automated Guided Vehicles. Applied Sciences. 2025; 15(5):2494. https://doi.org/10.3390/app15052494
Chicago/Turabian StyleBalawender, Krzysztof, Artur Jaworski, Mirosław Jakubowski, and Hubert Kuszewski. 2025. "Effect of Selected Optical Navigation Methods on the Energy Consumption of Automated Guided Vehicles" Applied Sciences 15, no. 5: 2494. https://doi.org/10.3390/app15052494
APA StyleBalawender, K., Jaworski, A., Jakubowski, M., & Kuszewski, H. (2025). Effect of Selected Optical Navigation Methods on the Energy Consumption of Automated Guided Vehicles. Applied Sciences, 15(5), 2494. https://doi.org/10.3390/app15052494