
Lateral Displacement and Distance of Vehicles in Freeway Overtaking Scenario Based on Naturalistic Driving Data


Abstract
:1. Introduction
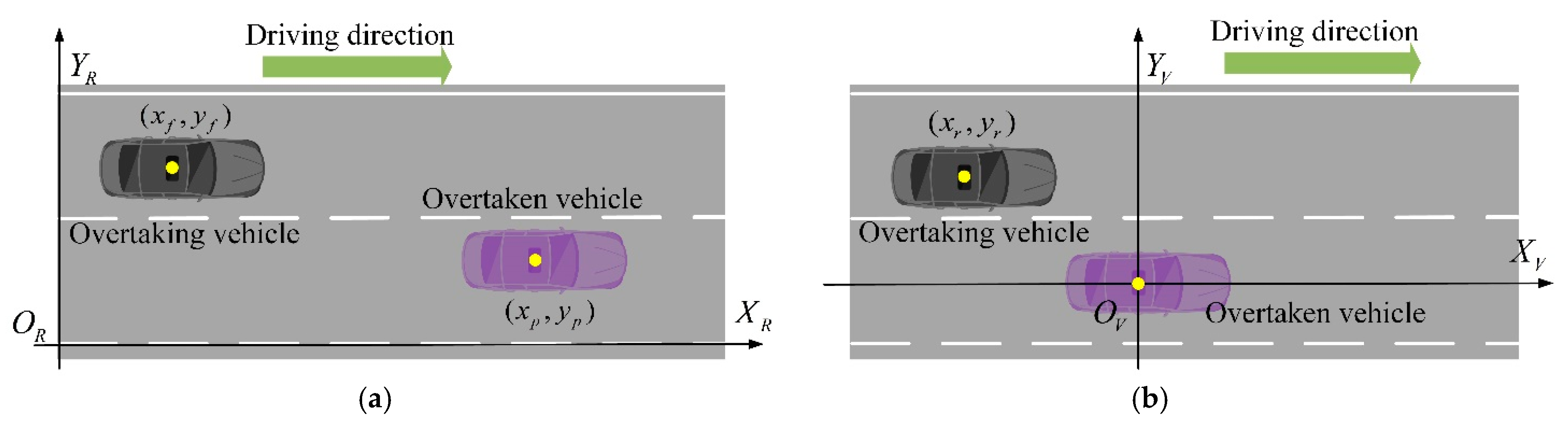
- To intuitively express the relative motion between vehicles, a vehicle coordinate system is established at the geometric center of the overtaken vehicle.
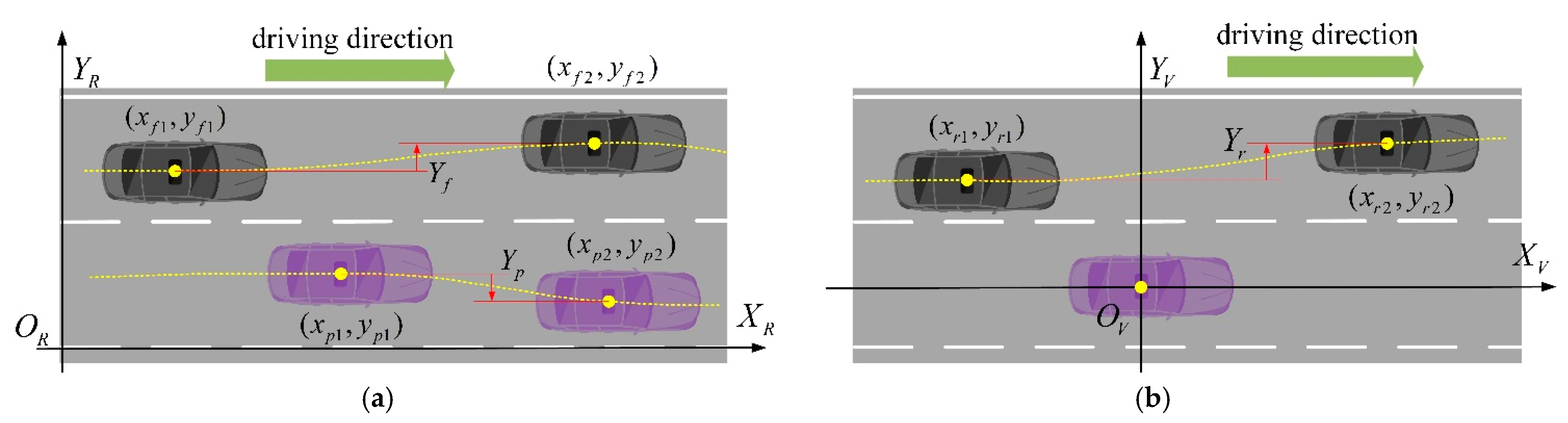
- To describe the lateral motion of a vehicle during overtaking, the absolute lateral displacement is defined in the road coordinate system and the relative lateral displacement is defined in the vehicle coordinate system.
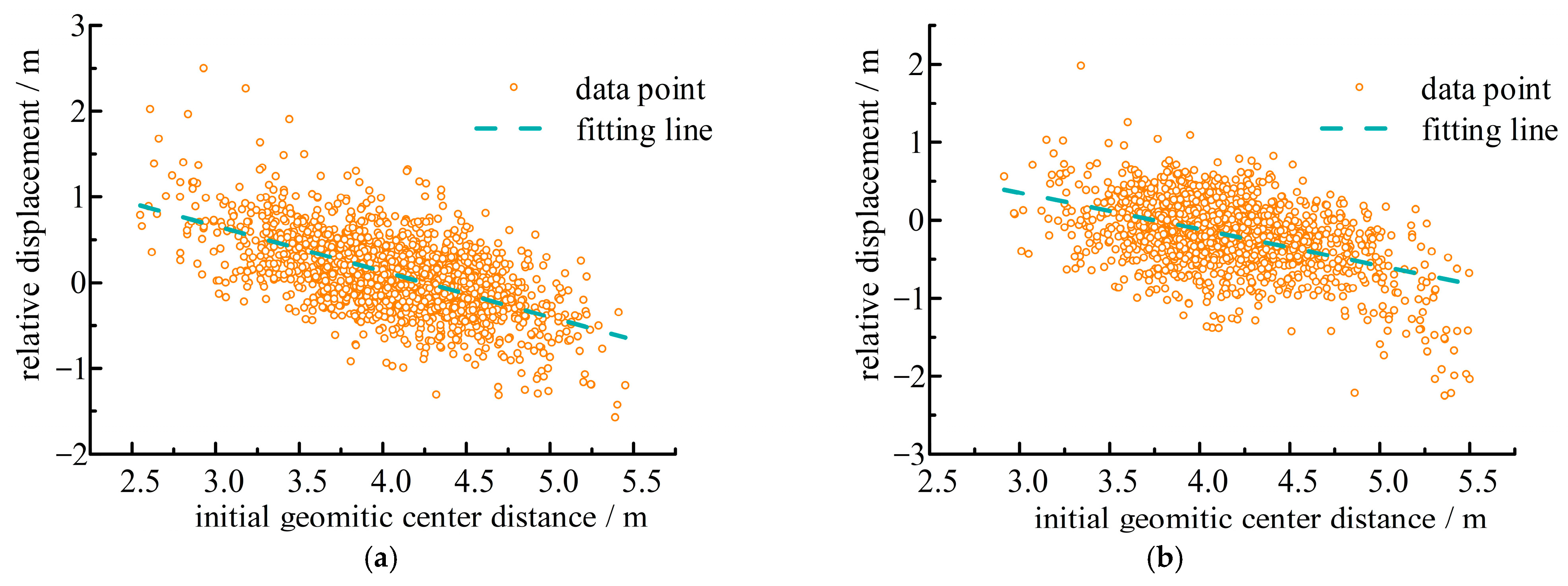
- According to the characteristics of the lateral displacement of vehicles in the process of overtaking, the expected lateral distance of the driver before and after overtaking is calculated by using the linear fitting method.
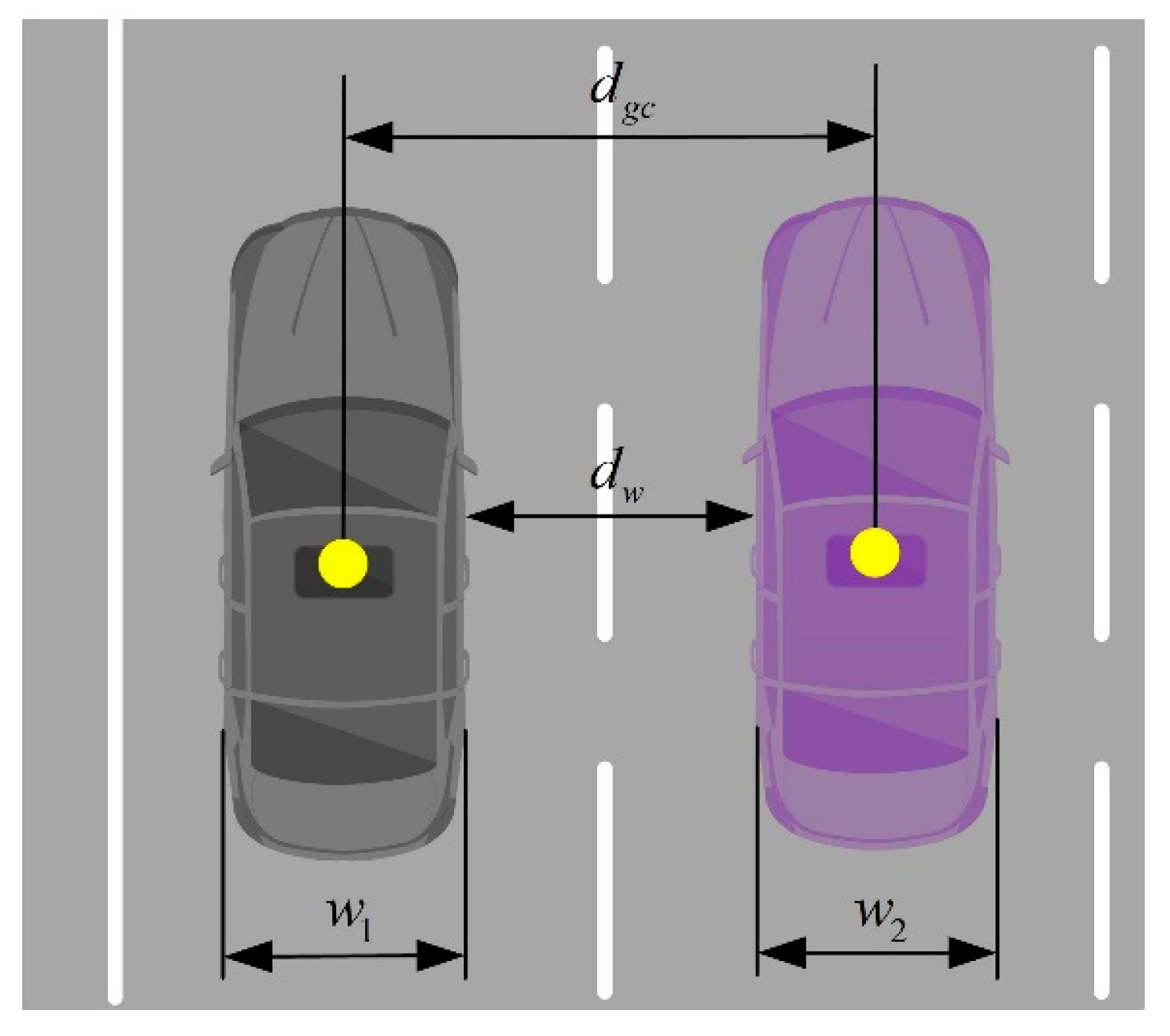
- Based on the width of the truck lane and the lateral distance of two parallel vehicles, the width of the passenger lane is calculated.
2. Literature Review
3. Materials and Methods
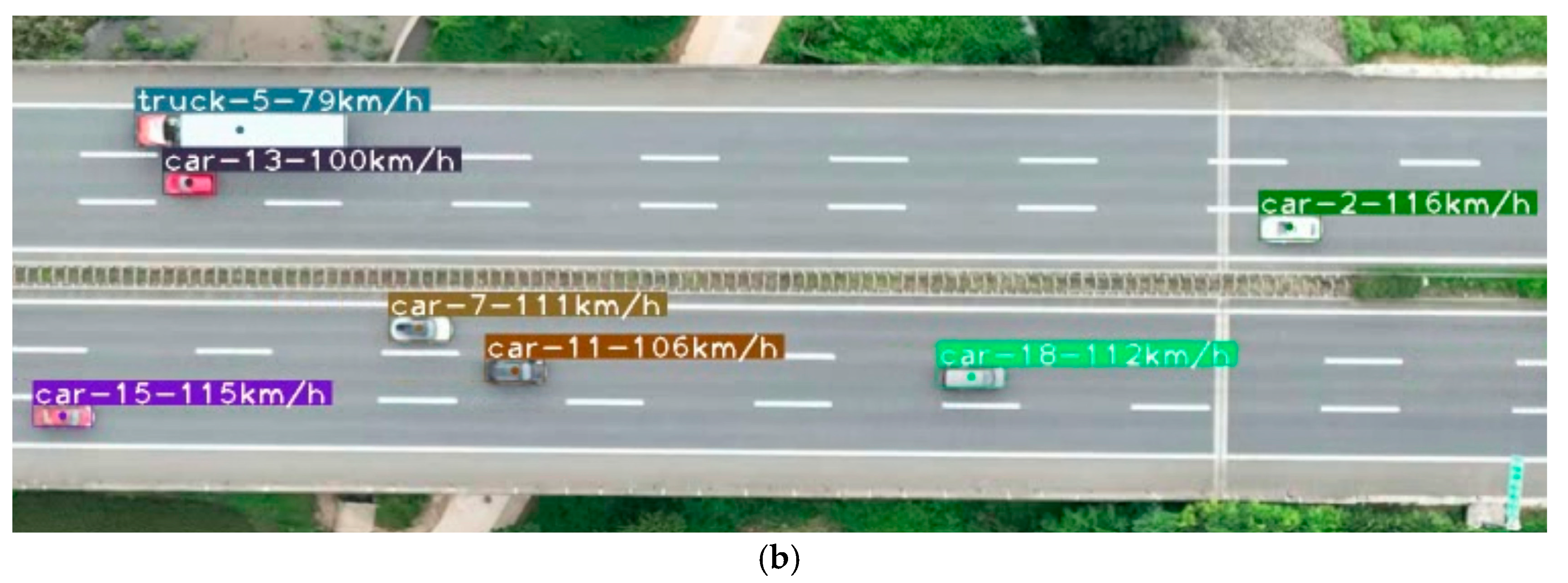
3.1. Vehicle Trajectory Extraction
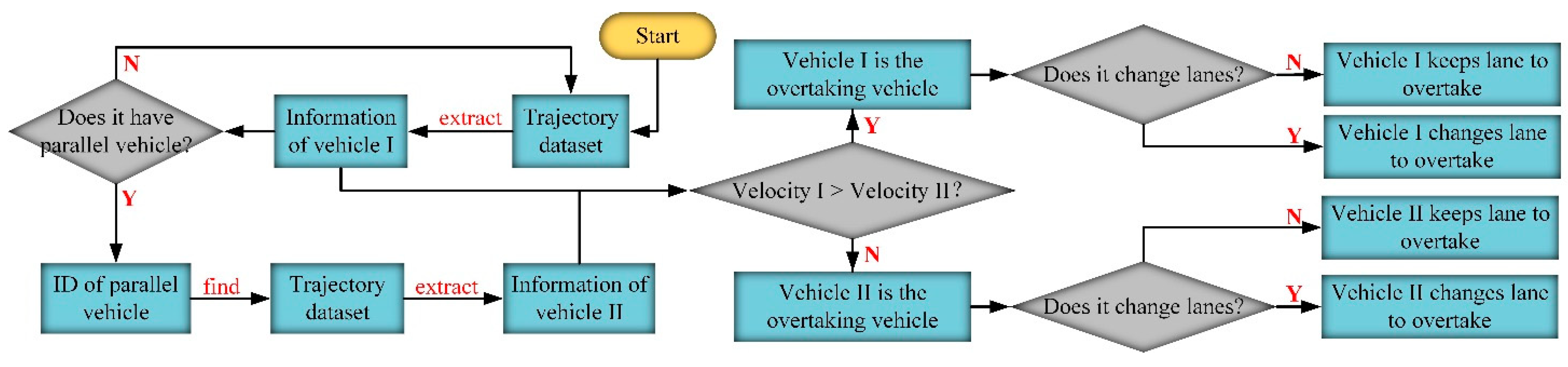
3.2. Overtaking Event Extraction
3.3. Vehicle Motion Reference Frames
3.4. Overtaking Phase Division
3.5. Lateral Displacement Definition
3.6. Lateral Distance Definition
4. Results and Discussion
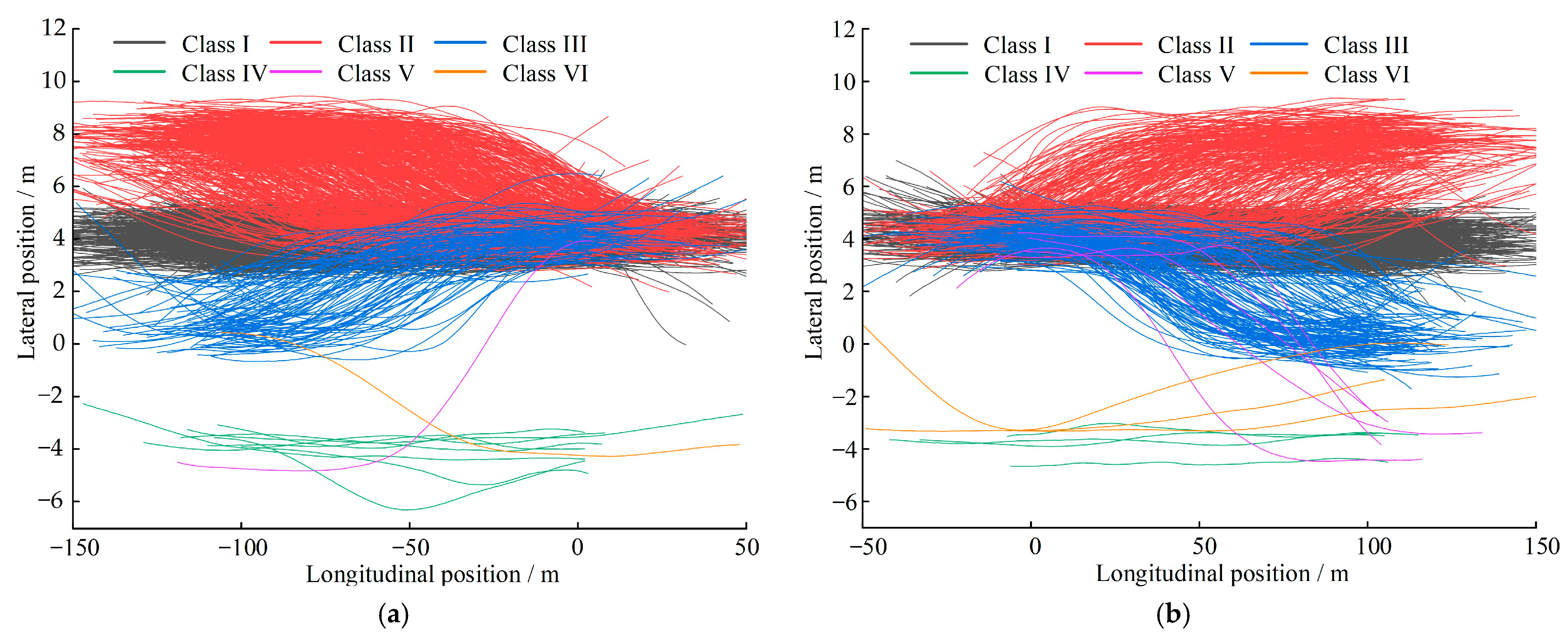
4.1. Overtaking Trajectory in the Vehicle Reference Frame
4.2. Lateral Displacement for Lane-Keeping Overtaking
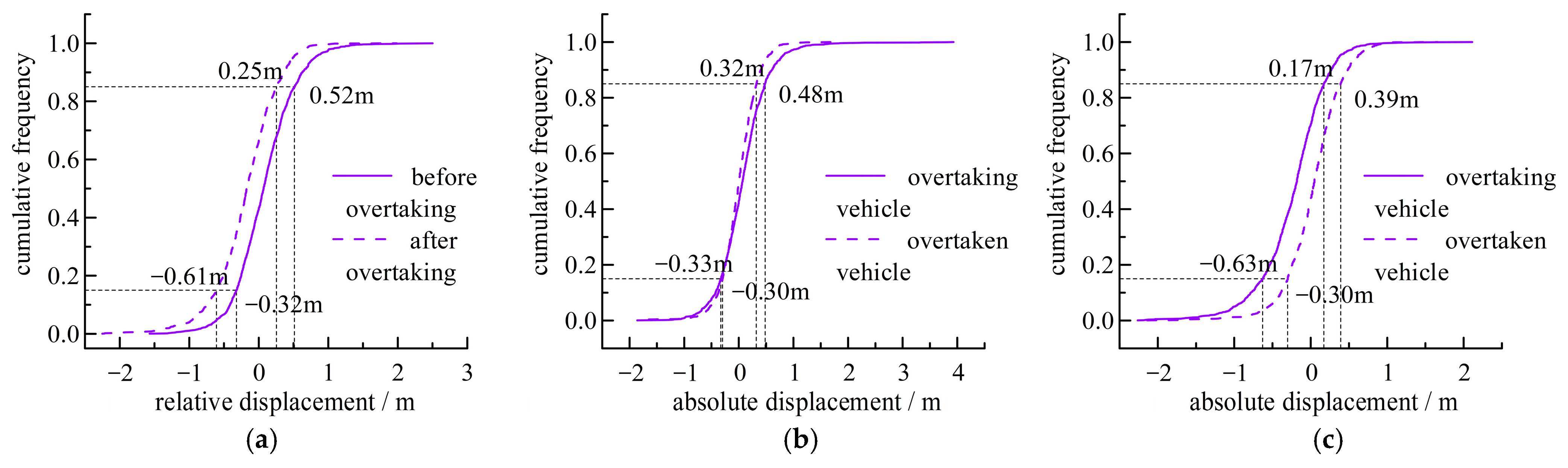
4.2.1. Distribution Characteristics of Lateral Displacement
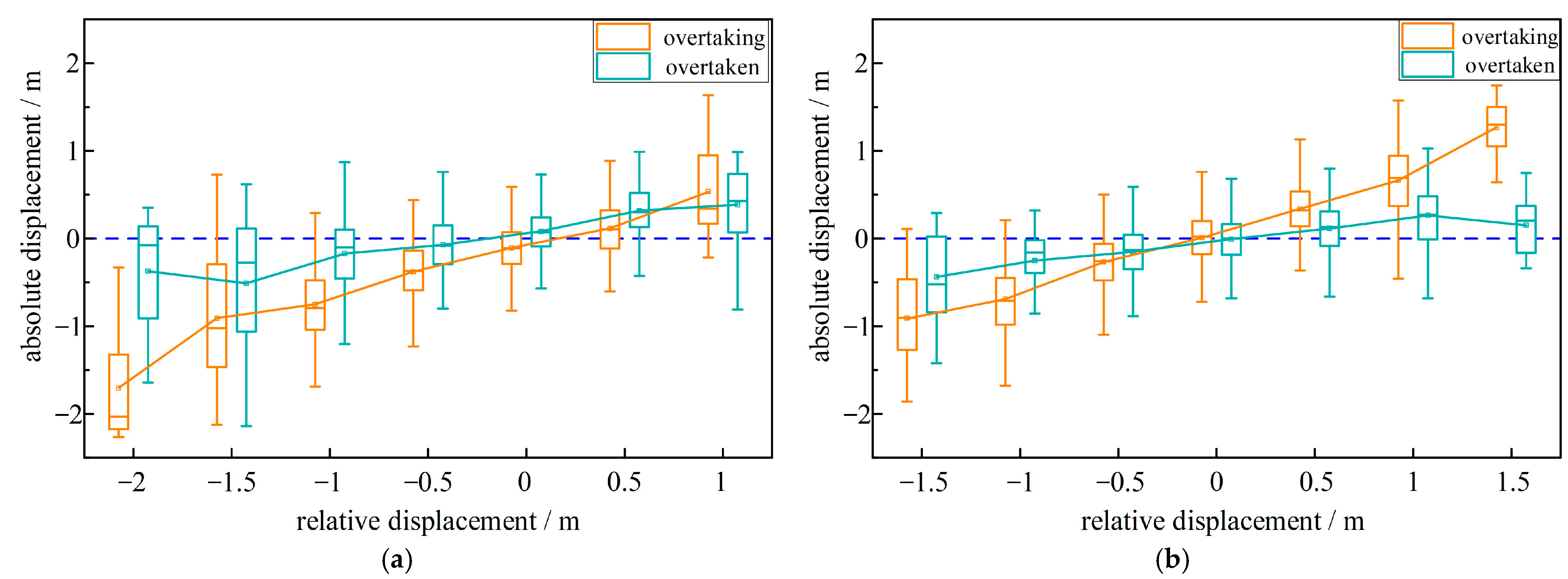
4.2.2. Factors Affecting Lateral Displacement
4.3. Lateral Displacement for Lane-Changing Overtaking
4.4. Lateral Distance Between Parallel Vehicles
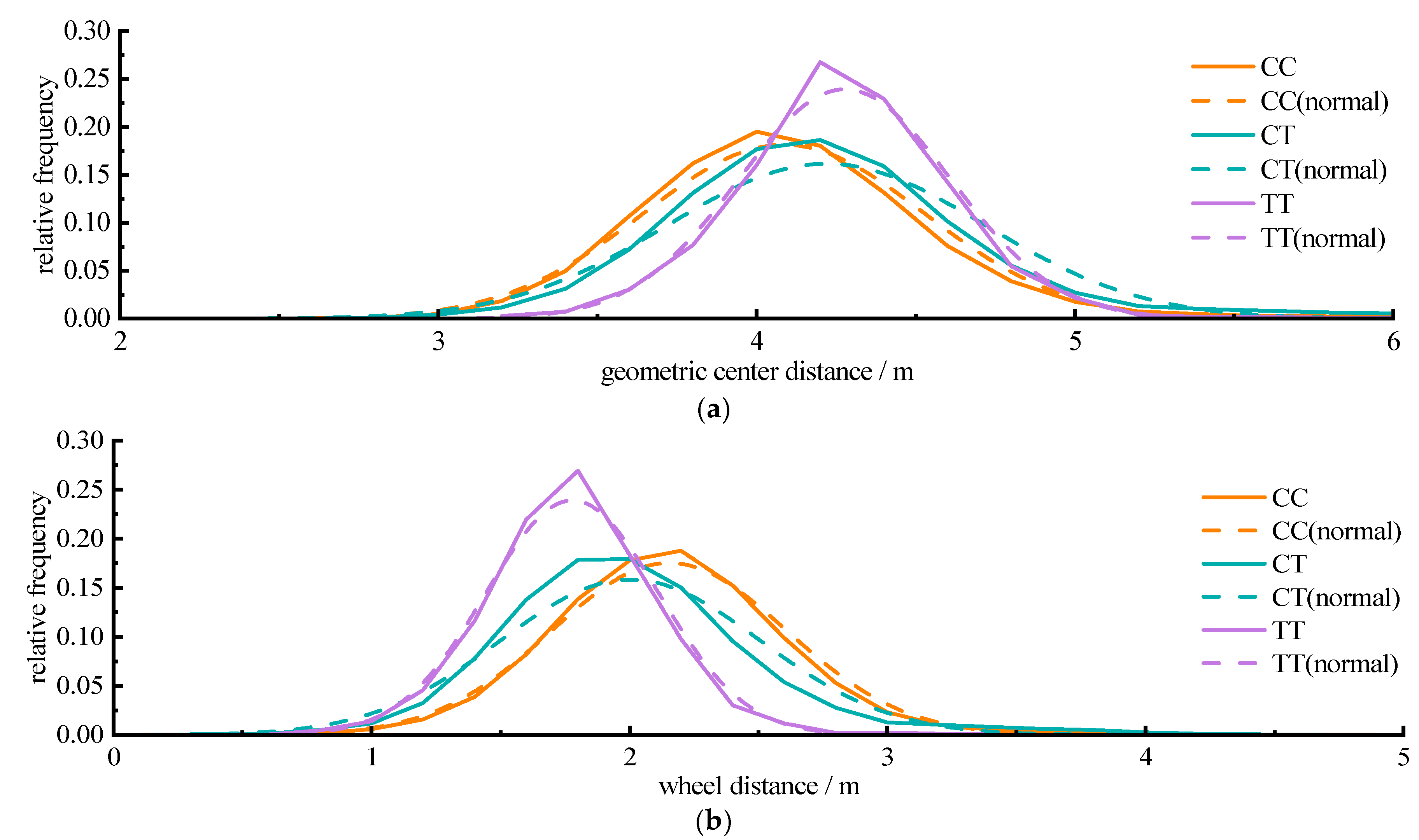
4.4.1. Distribution Characteristics of Lateral Distance
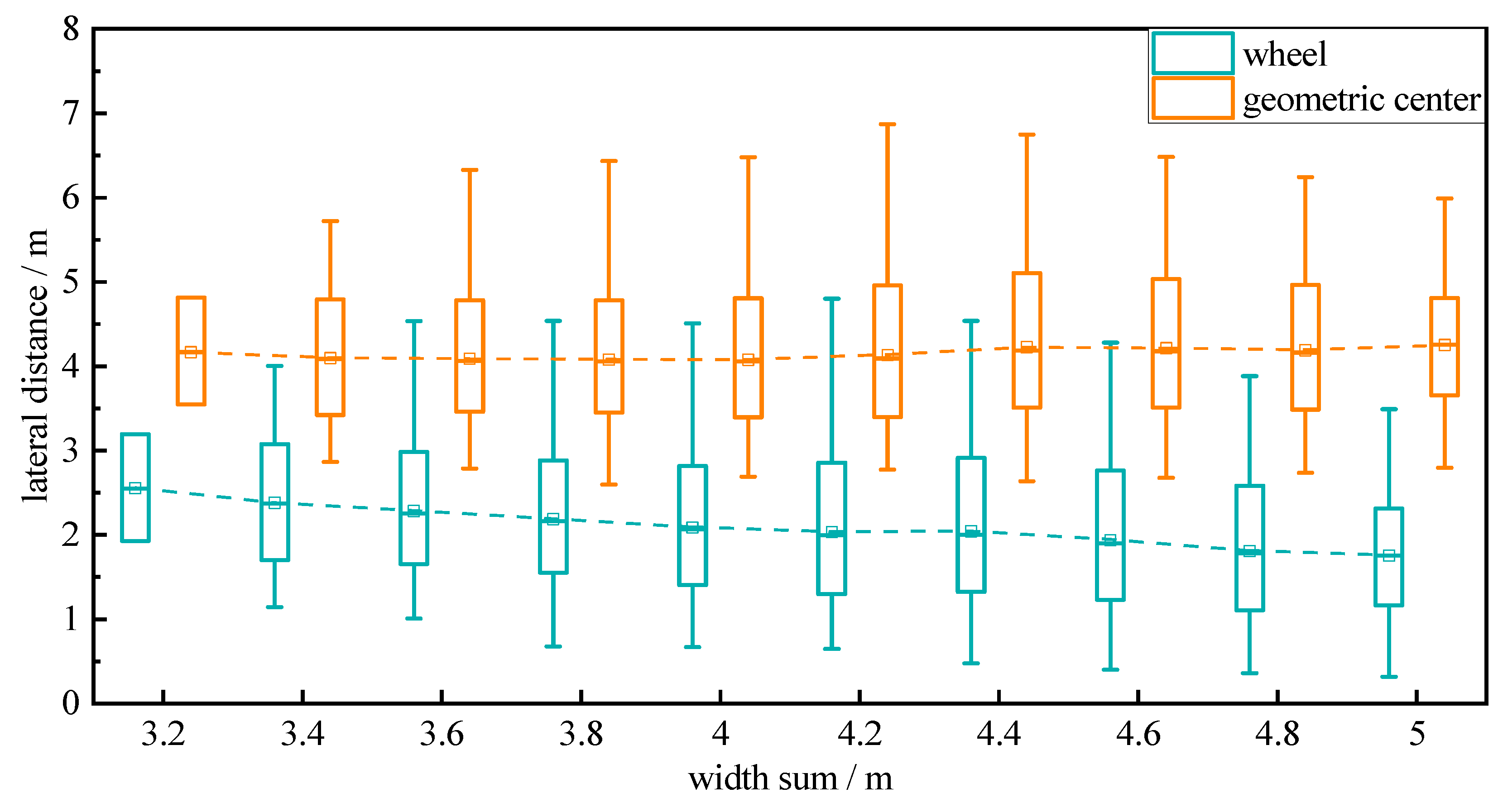
4.4.2. Factors Affecting Lateral Distance
4.5. Freeway Lane Width Design Based on the Overtaking
5. Conclusions
- (1)
- Vehicles’ lateral displacements are mainly related to behaviors such as lane changing, lateral distance maintenance and lane keeping. In the process of lane-keeping overtaking, the lateral approaching behavior and departing behavior exist in a certain proportion. The difference in lateral displacement behavior is related to the initial geometric center distance between vehicles and the lateral distance expectation of drivers. Taking the expectation of 4.24 m before overtaking and 3.75 m after overtaking as a baseline, when the initial geometric center distance is higher than this value, vehicles tend to approach each other; otherwise, they tend to depart from each other.
- (2)
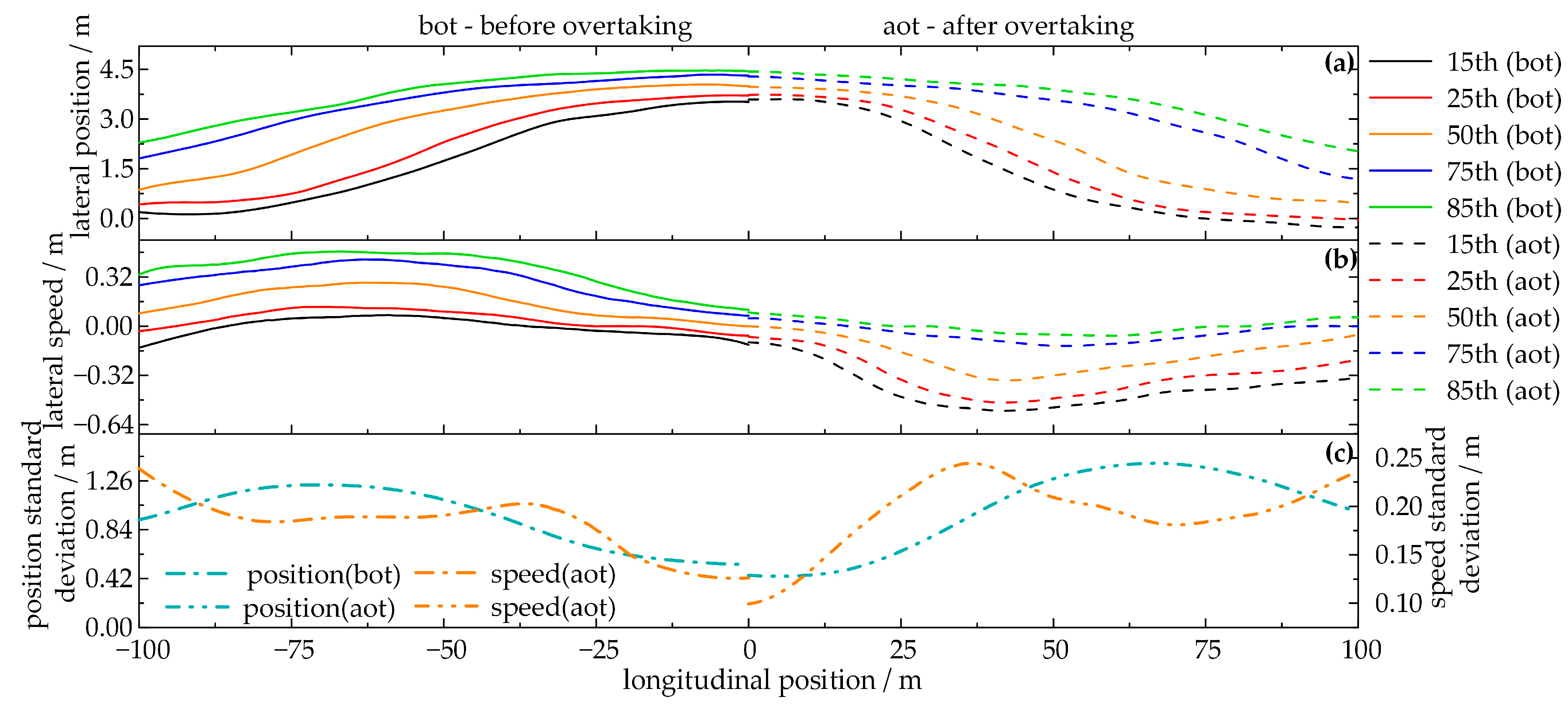
- For lane-changing overtaking behaviors, it can be seen that the overtaking vehicle tends to prepare in advance before overtaking and completes overtaking over a longer distance with a lower lateral speed; on the contrary, the lane-merging process after overtaking is completed over a shorter distance with a higher lateral speed. The standard deviation of overtaking trajectory and lateral speed take the minimum when the vehicles are parallel, and the lateral distance at that moment is better as the control factor of lane width design to take care of the behavioral habits of most drivers.
- (3)
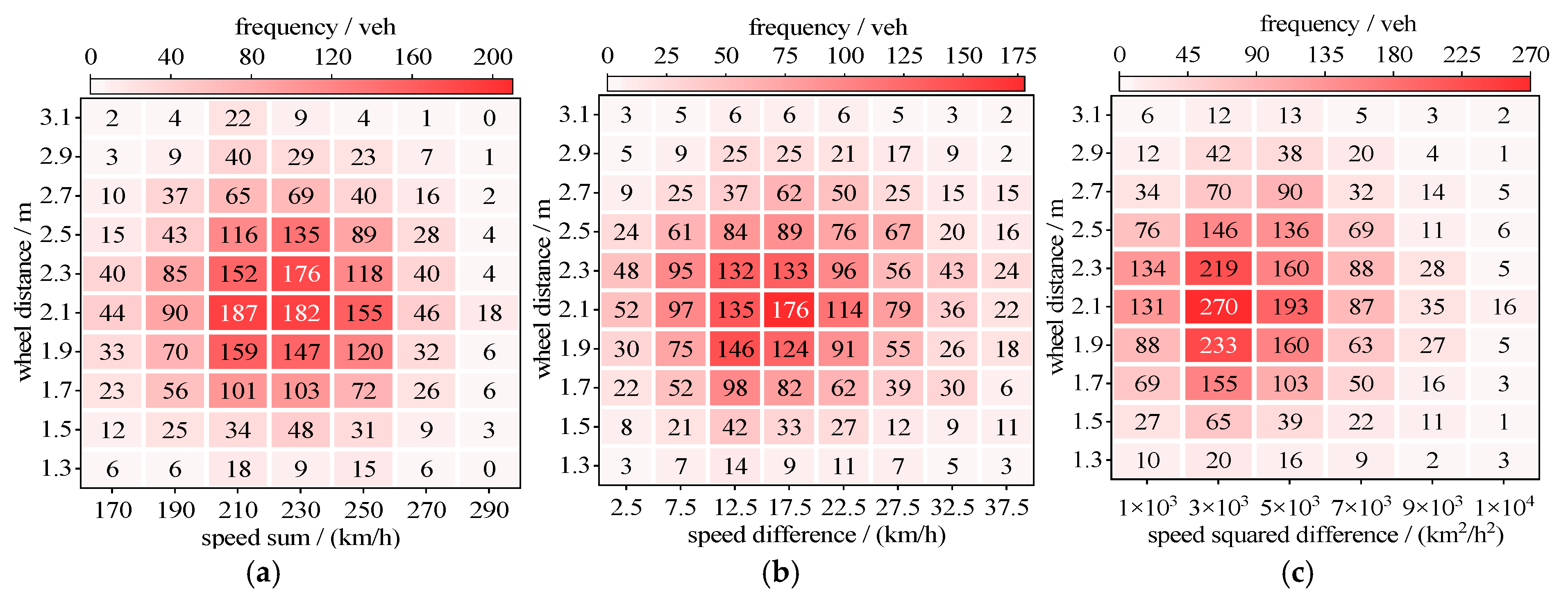
- The geometric center distance and wheel distance between parallel vehicles do not obey the normal distribution. Most of the geometric center distances are larger than the lane width of 3.75 m, which indicates that parallel vehicles cannot travel near the centerline of the lane at the same time. With the increasing the body width sum of vehicles, the geometric center distance does not change significantly, while the wheel distance has a significant decrease. In addition, speed does not significantly affect wheel distance in the freeway driving environment.
- (4)
- In this study, the geometric center distance between parallel vehicles is taken as one of the controlling factors in lane width design due to its lower sensitivity to the change in vehicle body width. Moreover, the vehicle body width and the lateral safety margin are also taken as the control factors for freeway lane width design. The general value of the passenger-dedicated lane width on freeways is recommended to be 3.5 m, and the limit value is 3.25 m.
- (5)
- In practical applications of freeway engineering, it is advisable to adopt a standard lane width of 3.5 m for passenger car lanes. Given a fixed construction budget, consideration may be given to utilizing the minimum permissible lane width of 3.25 m for inner lanes. The conserved lateral space can then be reallocated to widen the shoulder, thereby enhancing sight distance within curves to some extent.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ding, R.; Pan, C.; Dai, Z.; Xu, J. Lateral oscillation characteristics of vehicle trajectories on the straight sections of freeways. Appl. Sci. 2022, 12, 11498. [Google Scholar] [CrossRef]
- Jeon, S.; Lee, K.; Kum, D. Overtaking decision and trajectory planning in highway via hierarchical architecture of conditional state machine and chance constrained model predictive control. Robot. Auton. Fram. 2022, 151, 104014. [Google Scholar] [CrossRef]
- Motro, M.; Chu, A.; Choi, J.; Lavieri, P.S.; Pinjari, A.R.; Bhat, C.R.; Ghosh, J.; Heath, R.W., Jr. Vehicular ad-hoc network simulations of overtaking maneuvers on two-lane rural highways. Transp. Res. Part C Emerg. Technol. 2016, 72, 60–76. [Google Scholar] [CrossRef]
- Perumal, P.S.; Wang, Y.; Sujasree, M.; Mukthineni, V.; Shimgekar, S.R. Intelligent advice frame for human drivers to prevent overtaking accidents in roads. Expert Fram. Appl. 2022, 199, 117178. [Google Scholar] [CrossRef]
- Shoaeb, A.; El-Badawy, S.M.; Shawly, S.; Shahdah, U.E. A proposed overtaking model for Egyptian two-lane two-way roads. IATSS Res. 2024, 48, 275–287. [Google Scholar] [CrossRef]
- Zhang, R.; Qiong, B.; Brijs, K.; Hermans, E.; Qu, Q.; Shen, Y. Overtaking maneuvers on two-lane highways under the microscope: Exploration of a multidimensional framework for the analysis of safety, comfort and efficiency using simulator data. Accid. Anal. Prev. 2024, 202, 107613. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Li, Z.; Yang, Y.; Qi, L.; Ke, R. High-resolution vehicle trajectory extraction and denoising from aerial videos. IEEE Trans. Intell. Transp. Fram. 2020, 22, 3190–3202. [Google Scholar] [CrossRef]
- Krajewski, R.; Bock, J.; Kloeker, L.; Eckstein, L. The highd dataset: A drone dataset of naturalistic vehicle trajectories on german highways for validation of highly automated driving frames. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Frames (ITSC), Maui, HI, USA, 4–7 November 2018; IEEE: New York, NY, USA, 2018; pp. 2118–2125. [Google Scholar]
- Hancock, M.W.; Wright, B. A Policy on Geometric Design of Highways and Streets; American Association of State Highway and Transportation Officials: Washington, DC, USA, 2013; Volume 3, p. 20. [Google Scholar]
- Road and Transportation Research Association. Guidelines for the Design of Motorways; Road and Transportation Research Association: Cologne, Germany, 2008. [Google Scholar]
- Transportation Association of Canada. Geometric Design Guide for Canadian Roads: Design Controls, Classification and Consistency; Transportation Association of Canada: Ottawa, ON, Canada, 2017. [Google Scholar]
- The UK Highways Agency. Design Manual for Roads and Bridges; The UK Highways Agency: London, UK, 2020. [Google Scholar]
- JTG B01-2014; Technical Standard of Highway Engineering. Ministry of Transportation of China Press: Beijing, China, 2014.
- Kondyli, A.; Hale, D.K.; Asgharzadeh, M.; Schroeder, B.; Jia, A.; Bared, J. Evaluating the operational effect of narrow lanes and shoulders for the highway capacity manual. Transp. Res. Rec. 2019, 2673, 558–570. [Google Scholar] [CrossRef]
- Fitzpatrick, K.; Dixon, K.; Avelar, R. Evaluating operational implications of reduced lane and shoulder widths on freeways. J. Transp. Eng. 2016, 142, 04016052. [Google Scholar] [CrossRef]
- Dixon, K.; Fitzpatrick, K.; Avelar, R. Operational and safety trade-offs: Reducing freeway lane and shoulder width to permit an additional lane. Transp. Res. Rec. 2016, 2588, 89–97. [Google Scholar] [CrossRef]
- Wu, L.; Sun, J.; Li, T. Relationship between lane width and safety along urban expressways in Shanghai. J. Transp. Eng. Part A Syst. 2019, 145, 05018004. [Google Scholar] [CrossRef]
- Wang, Q.; Yan, Y.; Wang, K. Research on optimized design of road space in mixed sections of historical district: A case study of Xi’an, China. Can. J. Civ. Eng. 2021, 48, 1105–1114. [Google Scholar] [CrossRef]
- Zhuang, J.F.; Li, Z.J.; Ding, R.; Xiong, W.L.; Zhang, H.S.; Xu, J. Vehicles trajectory oscillation characteristics and passenger cars’ lane width for freeways. J. Transp. Fram. Eng. Inf. Technol. 2023, 23, 324. [Google Scholar]
- Figueira, A.C.; Larocca, A.P.C. Analysis of the factors influencing overtaking in two-lane highways: A driving simulator study. Transp. Res. Part F Traffic Psychol. Behav. 2020, 69, 38–48. [Google Scholar] [CrossRef]
- Soni, R.; Vasudevan, V.; Dutta, B. Analysis of overtaking patterns of Indian drivers with data collected using a LiDAR. Transp. Res. Part F Traffic Psychol. Behav. 2020, 74, 139–150. [Google Scholar] [CrossRef]
- Choudhari, T.; Budhkar, A.; Maji, A. Modeling overtaking distance and time along two-lane undivided rural highways in mixed traffic condition. Transp. Lett. 2022, 14, 75–83. [Google Scholar] [CrossRef]
- Pawar, N.M.; Velaga, N.R. Investigating the influence of time pressure on overtaking maneuvers and crash risk. Transp. Res. Part F Traffic Psychol. Behav. 2021, 82, 268–284. [Google Scholar] [CrossRef]
- Qian, Y.; Luo, J.; Zeng, J.; Shao, X.; Guo, W. Study on security features of freeway traffic flow with cellular automata model—Taking the number of overtake as an example. Measurement 2013, 46, 2035–2042. [Google Scholar] [CrossRef]
- Zhang, W.H.; Li, P.; Hu, M.; Li, Y. Driver’s visual behavior characteristics during overtaking on a freeway. J. Tsinghua Univ. 2014, 54, 1204–1208. [Google Scholar]
- Sui, Z.; Liang, S.; Tian, Y. Intelligent driving model considering lateral active safety of vehicles. Zidonghua Xuebao 2021, 47, 1899–1911. [Google Scholar]
- Svärd, M.; Markkula, G.; Aust, M.L.; Bärgman, J. Using naturalistic and driving simulator data to model driver responses to unintentional lane departures. Transp. Res. Part F Traffic Psychol. Behav. 2024, 100, 361–387. [Google Scholar] [CrossRef]
- Liu, J.; Guo, Z.; Shan, D.; Liu, X. Effective lane width for cars considering lateral oscillation characteristics based on high-precision field data. Int. J. Transp. Sci. Technol. 2024, 16, 18–33. [Google Scholar] [CrossRef]
- Pan, C.; Dai, Z.; Zhang, Y.; Zhang, H.; Fan, M.; Xu, J. An approach for accurately extracting vehicle trajectory from aerial videos based on computer vision. Measurement 2024, 242, 116212. [Google Scholar] [CrossRef]
- Jiao, Y.; Calvert, S.C.; Van Cranenburgh, S.; van Lint, H. Inferring vehicle spacing in urban traffic from trajectory data. Transp. Res. Part C Emerg. Technol. 2023, 155, 104289. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Part | Author | Content | Result |
|---|---|---|---|
| The effect of lane width on traffic | Kondyli et al. [14] | The operational effect of narrow lanes and shoulders. | A new free-flow speed regression model. |
| Fitzpatrick et al. [15] | The operational implications of using reduced lane and shoulder widths. | Improving safety levels becomes challenging when lane widths exceed 12 feet. | |
| Dixon et al. [16] | The operational and safety implications of the use of reduced lane and shoulder widths. | The width of the left shoulder is more important with a reduced lane width. | |
| Wu et al. [17] | The impact of lane widths on crash frequency for various types of crashes. | Standard-sized lanes with a width of 3.45 m have the lowest collision risk. | |
| Lane width calculation model | Wang et al. [18] | The Bolankerf model. | The Bolankerf model parameters are recalibrated by combining the survey data. |
| Zhuang et al. [19] | The trajectory lateral oscillation behavior of vehicles during lane-keeping driving on freeways. | The minimum and general value of lane width for a dedicated passenger car lane with a design speed of 100–120 km·h−1 are 3.0 m and 3.25 m. | |
| Overtaking behavior | Figueira et al. [20] | The effects of the speed of an impeding vehicle on the following gap. | The effect of the speed of an impeding vehicle on the following gap at the beginning of overtaking was greater than the effect of the type of the impeding vehicle or the passing sight distance. |
| Soni et al. [21] | The excess distance during overtaking. | The rate of change in excess distance depends upon the type of road and the type of overtaking vehicle. | |
| Choudhari et al. [22] | Overtaking distance and time models for mixed traffic. | The distance and time required to overtake a heavy vehicle were found to be the longest. | |
| Pawar et al. [23] | The driving performance of the drivers and its implication on overtaking and crash probabilities under increasing time pressure conditions. | Overtaking and crash probabilities decreased with increments in minimum time-to-line crossing and coefficient of variation in speed values. | |
| Qian et al. [24] | The overtaking ratio of traffic. | Different lane control conditions and mixing ratios have significant influences. | |
| Zhang et al. [25] | A simulation of overtaking behavior. | The probability of obtaining traffic information via the left and right mirrors is approximately 14%, which is significantly higher compared to other areas. |
| Sites | Number | Lane Width/m | Road Length /m | Recording Number | Recording Time/Minute | Speed Limit /(km/h) |
|---|---|---|---|---|---|---|
| Yurong Freeway | 1 | 3.75 | 405–415 | 11 | 164 | 120 |
| 2 | 3.75 | 408–417 | 13 | 187 | 120 | |
| Ring Freeway of Chongqing | 3 | 3.75 | 406–414 | 12 | 165 | 120 |
| 4 | 3.75 | 405–419 | 17 | 231 | 120 |
| Classes | Before Overtaking | After Overtaking | ||||||
|---|---|---|---|---|---|---|---|---|
| Sample Size | Initial Position | Driving Operation | Schema | Sample Size | Initial Position | Driving Operation | Schema | |
| I | 1773 | Left lane | Straight ahead |  | 1446 | Left lane | Straight ahead |  |
| II | 598 | Inside lane | Change lanes right |  | 315 | Left lane | Change lanes left |  |
| III | 101 | Ego lane | Change lanes left |  | 156 | Left lane | Change lanes right |  |
| IV | 8 | Right lane | Straight ahead | 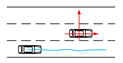 | 4 | Right lane | Straight ahead |  |
| V | 1 | Right lane | Continuous left lane change |  | 5 | Left lane | Continuous right lane change |  |
| VI | 1 | Ego lane | Change lanes right | 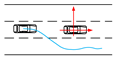 | 3 | Right lane | Straight ahead | 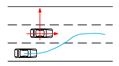 |
| Lateral Displacement Behavior | Before Overtaking | After Overtaking | ||||
|---|---|---|---|---|---|---|
| Relative Motion | Overtaking Vehicle | Overtaken Vehicle | Relative Motion | Overtaking Vehicle | Overtaken Vehicle | |
| Approach | 43% | 42% | 49% | 66% | 70% | 43% |
| Departure | 57% | 58% | 51% | 34% | 30% | 57% |
| Stage | Coefficient | Value | Standard Error | t | p | R2 |
|---|---|---|---|---|---|---|
| Before overtaking | Linear term | −0.530 | 0.017 | −31.50 | <0.001 | 0.356 |
| Constant term | 2.250 | 0.069 | 32.51 | <0.001 | ||
| After overtaking | Linear term | −0.468 | 0.024 | −19.85 | <0.001 | 0.211 |
| Constant term | 1.757 | 0.099 | 17.81 | <0.001 |
| Combination | Lateral Distance | Mean/m | S.D./m | Typical Percentile Values/m | Kurtosis | Skewness | Normal Distribution Test Results | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 15th | 25th | 50th | 75th | 85th | |||||||
| CC | Geometric center distance | 4.09 | 0.46 | 3.65 | 3.80 | 4.07 | 4.35 | 4.52 | 1.70 | 0.57 | <0.001 |
| wheel distance | 2.16 | 0.44 | 1.71 | 1.86 | 2.15 | 2.44 | 2.60 | 1.44 | 0.39 | <0.001 | |
| CT | Geometric center distance | 4.21 | 0.49 | 3.74 | 3.89 | 4.17 | 4.46 | 4.63 | 2.13 | 0.82 | <0.001 |
| wheel distance | 1.99 | 0.50 | 1.52 | 1.67 | 1.95 | 2.25 | 2.43 | 2.03 | 0.79 | <0.001 | |
| TT | Geometric center distance | 4.27 | 0.33 | 3.94 | 4.06 | 4.26 | 4.47 | 4.59 | 2.62 | 0.46 | 0.034 |
| wheel distance | 1.77 | 0.33 | 1.45 | 1.56 | 1.76 | 1.97 | 2.09 | 2.65 | 0.47 | 0.024 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, C.; Zhang, Y.; Zhang, H.; Xu, J. Lateral Displacement and Distance of Vehicles in Freeway Overtaking Scenario Based on Naturalistic Driving Data. Appl. Sci. 2025, 15, 2370. https://doi.org/10.3390/app15052370
Pan C, Zhang Y, Zhang H, Xu J. Lateral Displacement and Distance of Vehicles in Freeway Overtaking Scenario Based on Naturalistic Driving Data. Applied Sciences. 2025; 15(5):2370. https://doi.org/10.3390/app15052370
Chicago/Turabian StylePan, Cunshu, Yuhao Zhang, Heshan Zhang, and Jin Xu. 2025. "Lateral Displacement and Distance of Vehicles in Freeway Overtaking Scenario Based on Naturalistic Driving Data" Applied Sciences 15, no. 5: 2370. https://doi.org/10.3390/app15052370
APA StylePan, C., Zhang, Y., Zhang, H., & Xu, J. (2025). Lateral Displacement and Distance of Vehicles in Freeway Overtaking Scenario Based on Naturalistic Driving Data. Applied Sciences, 15(5), 2370. https://doi.org/10.3390/app15052370