
Control for Autonomous Intersection Management Based on Adaptive Control Barrier Function



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
1.1. Traffic Light Optimization
1.2. Connected Vehicles (Centralized Control)
1.3. Autonomous Vehicles (Decentralized Control)
1.3.1. Environmental Perception
1.3.2. Decision-Making
- Adaptive fault compensation —By integrating an adaptive update mechanism, the method effectively compensates for power transmission loss, ensuring safety constraints are upheld even in the presence of controllability loss.
- Decentralized control—The framework operates in a decentralized manner, eliminating the need for traffic lights, reducing vehicle parking delays, and demonstrating scalability in large autonomous systems.
- Computational efficiency—Unlike network-learning-based methods, aCBF-based control does not require pre-training, reducing computational overhead while guaranteeing safety in multi-agent systems.
- Broad applicability—The ability to simultaneously address power transmission loss robustness and broader AIM challenges makes this approach a promising solution for autonomous intersection management.
2. Preliminaries
2.1. CBF
2.2. Projection Operator
3. Controller Design
3.1. Control Problem Formalization
3.2. A Safe Adaptive Controller Design
| Algorithm 1: Adaptive CBF-based Controller for AIM |
Input: Initial state , initial power transmission efficiency
, safe set , nominal control input , obstacle velocity
bound . Output: Safe control input ensuring collision-free navigation. |
 |
4. Simulations and Experiments
4.1. Simulations
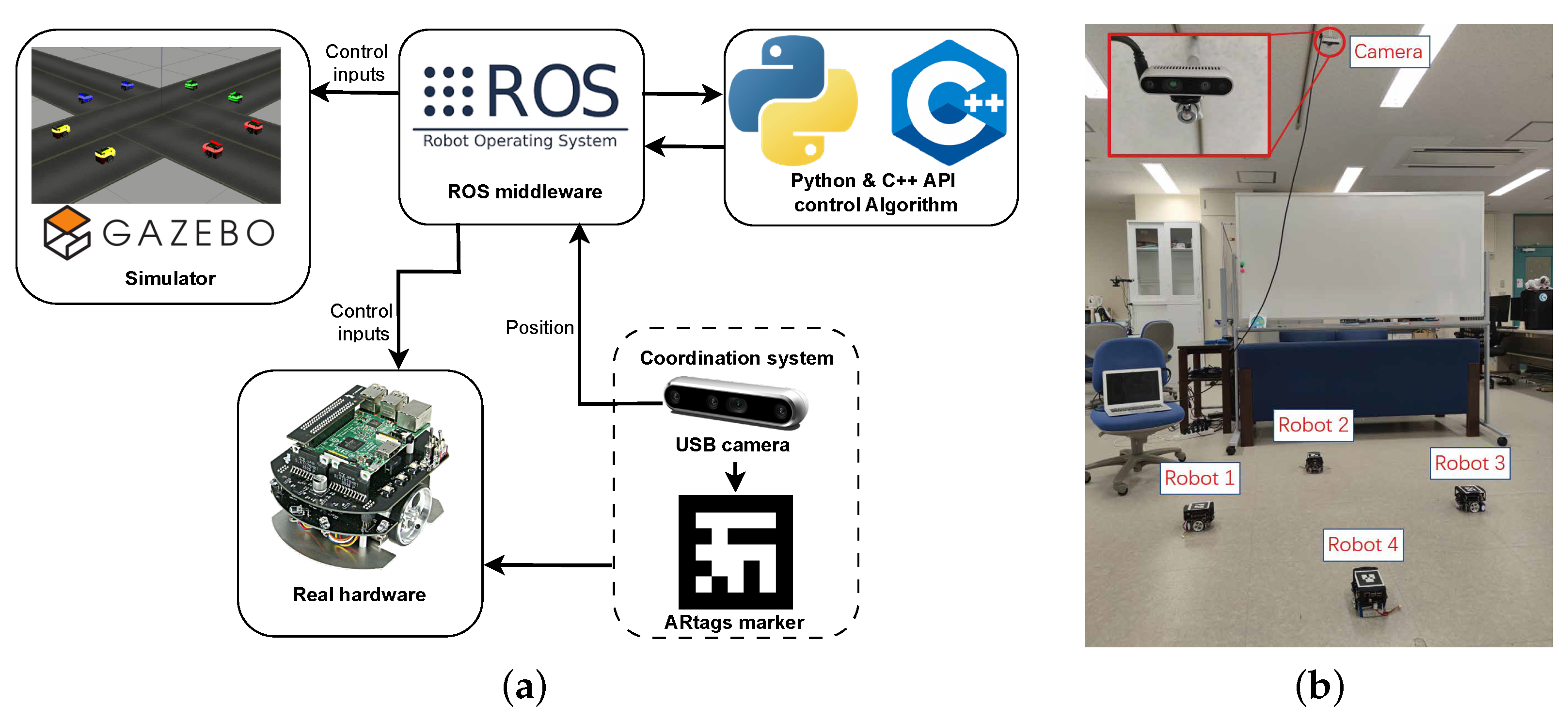
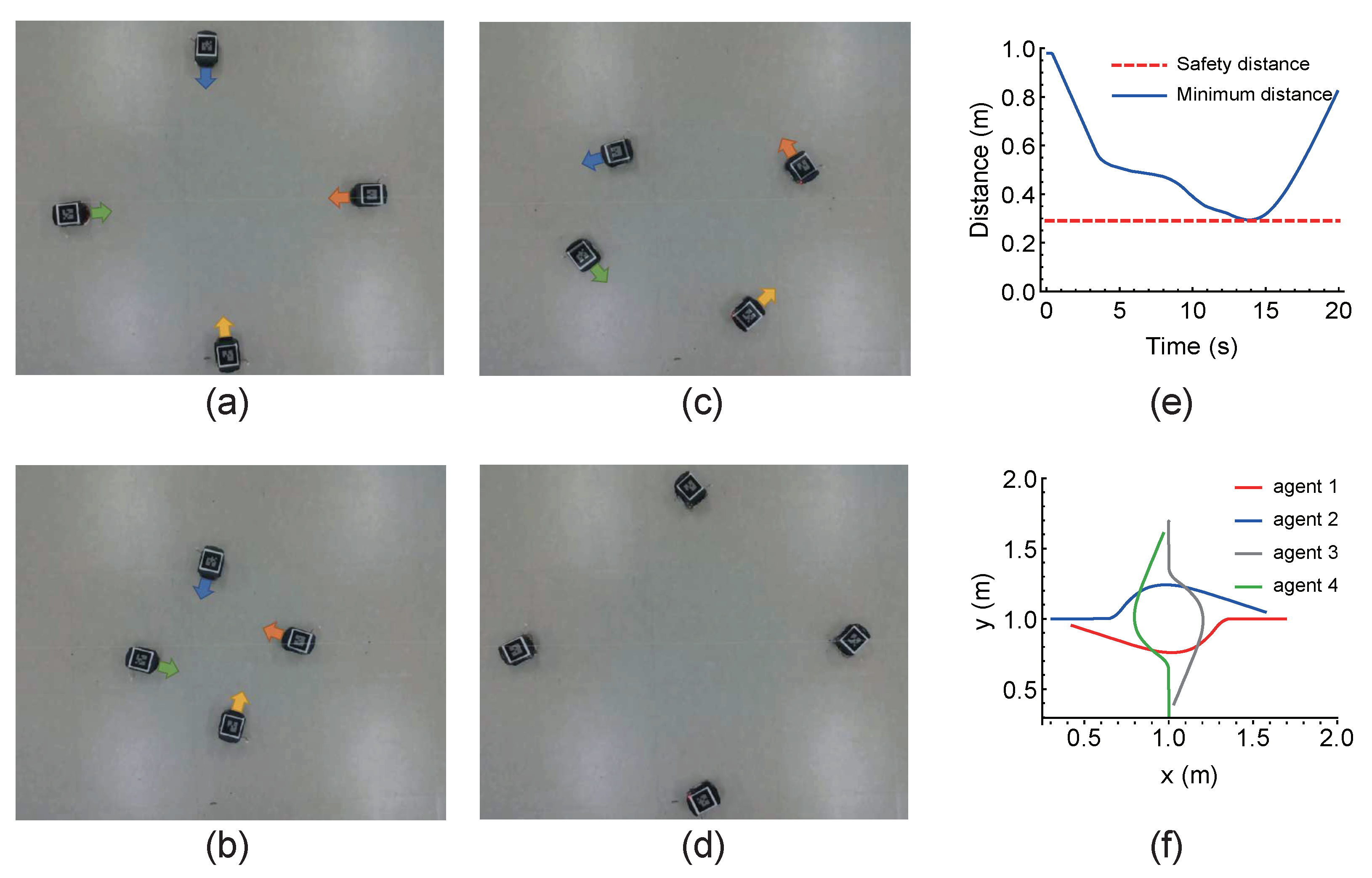
4.2. Experiments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dresner, K.; Stone, P. A multiagent approach to autonomous intersection management. J. Artif. Intell. Res. 2008, 31, 591–656. [Google Scholar] [CrossRef]
- Filocamo, B.; Alonso Ruiz, J.; Sotelo, M.A. Efficient management of road intersections for automated vehicles—The FRFP system applied to the various types of intersections and roundabouts. Appl. Sci. 2019, 10, 316. [Google Scholar] [CrossRef]
- Carlino, D.; Boyles, S.D.; Stone, P. Auction-Based Autonomous Intersection Management. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), The Hague, The Netherlands, 6–9 October 2013; Volume 16, pp. 529–534. [Google Scholar]
- Namazi, E.; Li, J.; Lu, C. Intelligent intersection management systems considering autonomous vehicles: A systematic literature review. IEEE Access 2019, 7, 91946–91965. [Google Scholar] [CrossRef]
- Bian, Y.; Li, S.E.; Ren, W.; Wang, J.; Li, K.; Liu, H.X. Cooperation of multiple connected vehicles at unsignalized intersections: Distributed observation, optimization, and control. IEEE Trans. Ind. Electron. 2019, 67, 10744–10754. [Google Scholar] [CrossRef]
- Noh, S. Decision-making framework for autonomous driving at road intersections: Safeguarding against collision, overly conservative behavior, and violation vehicles. IEEE Trans. Ind. Electron. 2018, 66, 3275–3286. [Google Scholar] [CrossRef]
- Ghazal, B.; ElKhatib, K.; Chahine, K.; Kherfan, M. Smart Traffic Light Control System. In Proceedings of the Third International Conference on Electrical, Electronics, Computer Engineering and Their Applications (EECEA), Beirut, Lebanon, 21–23 April 2016; Volume 3, pp. 140–145. [Google Scholar]
- Vidhya, K.; Banu, A.B. Density-based traffic signal system. Int. J. Innov. Res. Sci. Eng. Technol. 2014, 3, 2218–2222. [Google Scholar]
- Monika, G.; Kalpana, N.; Gnanasundari, P. An intelligent automatic traffic light controller using embedded systems. Int. J. Innov. Res. Sci. Eng. Technol. 2015, 4, 19–27. [Google Scholar]
- Chen, Y.L.; Wu, B.F.; Huang, H.Y.; Fan, C.J. A real-time vision system for nighttime vehicle detection and traffic surveillance. IEEE Trans. Ind. Electron. 2010, 58, 2030–2044. [Google Scholar] [CrossRef]
- Liang, X.; Du, X.; Wang, G.; Han, Z. A deep reinforcement learning network for traffic light cycle control. IEEE Trans. Veh. Technol. 2019, 68, 1243–1253. [Google Scholar] [CrossRef]
- Hobert, L.; Festag, A.; Llatser, I.; Altomare, L.; Visintainer, F.; Kovacs, A. Enhancements of V2X communication in support of cooperative autonomous driving. IEEE Commun. Mag. 2015, 53, 64–70. [Google Scholar] [CrossRef]
- Dorrell, D.; Vinel, A.; Cao, D. Connected vehicles—Advancements in vehicular technologies and informatics. IEEE Trans. Ind. Electron. 2015, 62, 7824–7826. [Google Scholar] [CrossRef]
- Lin, P.; Liu, J.; Jin, P.J.; Ran, B. Autonomous vehicle-intersection coordination method in a connected vehicle environment. IEEE Intell. Transp. Syst. Mag. 2017, 9, 37–47. [Google Scholar] [CrossRef]
- Isele, D.; Cosgun, A.; Fujimura, K. Analyzing knowledge transfer in deep Q-networks for autonomously handling multiple intersections. arXiv 2017, arXiv:1705.01197. [Google Scholar]
- Shabestary, S.M.A.; Abdulhai, B. Deep learning vs. discrete reinforcement learning for adaptive traffic signal control. Proc. Int. Conf. Intell. Transp. Syst. 2018, 21, 286–293. [Google Scholar]
- Seiler, P.; Pant, A.; Hedrick, K. Disturbance propagation in vehicle strings. IEEE Trans. Autom. Control 2004, 49, 1835–1842. [Google Scholar] [CrossRef]
- Gao, H.; Cheng, B.; Wang, J.; Li, K.; Zhao, J.; Li, D. Object classification using CNN-based fusion of vision and LIDAR in autonomous vehicle environment. IEEE Trans. Ind. Inform. 2018, 14, 4224–4231. [Google Scholar] [CrossRef]
- Bai, Y.; Wang, Y.; Xiong, X.; Svinin, M.; Magid, E. Adaptive Multi-Agent Control with Dynamic Obstacle Avoidance in a Limited Region. In Proceedings of the 2022 American Control Conference (ACC), Atlanta, GA, USA, 8–10 June 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 4695–4700. [Google Scholar]
- Wang, A.; Lu, J.; Cai, J.; Cham, T.J.; Wang, G. Large-margin multi-modal deep learning for RGB-D object recognition. IEEE Trans. Multimedia 2015, 17, 1887–1898. [Google Scholar] [CrossRef]
- Kosaka, N.; Ohashi, G. Vision-based nighttime vehicle detection using CenSurE and SVM. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2599–2608. [Google Scholar] [CrossRef]
- Chavez-Garcia, R.O.; Aycard, O. Multiple sensor fusion and classification for moving object detection and tracking. IEEE Trans. Intell. Transp. Syst. 2015, 17, 525–534. [Google Scholar] [CrossRef]
- Tang, J.; Liu, F.; Zhang, W.; Ke, R.; Zou, Y. Lane-changes prediction based on adaptive fuzzy neural network. Expert Syst. Appl. 2018, 91, 452–463. [Google Scholar] [CrossRef]
- Hang, P.; Lv, C.; Xing, Y.; Huang, C.; Hu, Z. Human-like decision making for autonomous driving: A noncooperative game theoretic approach. IEEE Trans. Intell. Transp. Syst. 2020, 22, 2076–2087. [Google Scholar] [CrossRef]
- Bai, Y.; Wang, Y.; Svinin, M.; Magid, E.; Sun, R. Adaptive multi-agent coverage control with obstacle avoidance. IEEE Control Syst. Lett. 2021, 6, 944–949. [Google Scholar] [CrossRef]
- Wang, W.; Qie, T.; Yang, C.; Liu, W.; Xiang, C.; Huang, K. An intelligent lane-changing behavior prediction and decision-making strategy for an autonomous vehicle. IEEE Trans. Ind. Electron. 2021, 69, 2927–2937. [Google Scholar] [CrossRef]
- Mihály, A.; Farkas, Z.; Gáspár, P. Multicriteria autonomous vehicle control at non-signalized intersections. Appl. Sci. 2020, 10, 7161. [Google Scholar] [CrossRef]
- Rehder, T.; Muenst, W.; Louis, L.; Schramm, D. Learning lane change intentions through lane contentedness estimation from demonstrated driving. In Proceedings of theIEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 893–898. [Google Scholar]
- Chen, J.; Zhou, Y.; Lv, Q.; Deveerasetty, K.K.; Dike, H.U. A review of autonomous obstacle avoidance technology for multi-rotor UAVs. In Proceedings of the IEEE International Conference on Information and Automation (ICIA), Wuyishan, China, 11–13 August 2018; pp. 244–249. [Google Scholar]
- Ames, A.D.; Xu, X.; Grizzle, J.W.; Tabuada, P. Control barrier function based quadratic programs for safety critical systems. IEEE Trans. Autom. Control 2017, 62, 3861–3876. [Google Scholar] [CrossRef]
- Yan, H.; Zhu, Q.; Zhang, Y.; Li, Z.; Du, X. An obstacle avoidance algorithm for unmanned surface vehicle based on a star and velocity-obstacle algorithms. In Proceedings of the 2022 IEEE 6th Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 4–6 March 2022; Volume 6, pp. 77–82. [Google Scholar]
- Peng, Y.; Qu, D.; Zhong, Y.; Xie, S.; Luo, J.; Gu, J. Obstacle detection and obstacle avoidance algorithm based on 2-D RPLIDAR. In Proceedings of the IEEE International Conference on Parallel & Distributed Processing with Applications, Big Data & Cloud Computing, Sustainable Computing & Communications, Social Computing & Networking (ISPA/BDCloud/SocialCom/SustainCom), New York City, NY, USA, 30 September–3 October 2021; pp. 1–4. [Google Scholar]
- Kim, J.C.; Pae, D.S.; Lim, M.T. Obstacle avoidance path planning algorithm based on model predictive control. In Proceedings of the 18th IEEE International Conference on Control, Automation and Systems (ICCAS), Pyeong Chang, Republic of Korea, 17–20 October 2018; pp. 141–143. [Google Scholar]
- Jia, F.; Liu, X.; Wu, J.; Shi, Y.; Xu, F.; Zhang, Z. Research on multi-AGV autonomous obstacle avoidance strategy based on improved A* algorithm. In Proceedings of the 2018 25th International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Stuttgart, Germany, 20–22 November 2018; pp. 1–6. [Google Scholar]
- Song, X. Research and design of robot obstacle avoidance strategy based on multisensor and fuzzy control. In Proceedings of the IEEE 2nd International Conference on Data Science and Computer Application (ICDSCA), Dalian, China, 28–30 October 2022; pp. 930–933. [Google Scholar]
- Ng, S.Y.; Ahmad, N.S. A bug-inspired algorithm for obstacle avoidance of a nonholonomic wheeled mobile robot with constraints. In Intelligent Computing, Proceedings of the 2019 Computing Conference, London, UK, 16–17 July 2019; Springer International Publishing: Berlin/Heidelberg, Germany, 2019; Volume 2, pp. 1235–1246. [Google Scholar]
- Sivaranjani, S.; Nandesh, D.A.; Gayathri, K.; Ramanathan, R. An investigation of bug algorithms for mobile robot navigation and obstacle avoidance in two-dimensional unknown static environments. In Proceedings of the International Conference on Communication information and Computing Technology (ICCICT), Mumbai, India, 25–27 June 2021; pp. 1–6. [Google Scholar]
- Cichosz, C.; Gurocak, H. Collision avoidance in human-cobot work cell using proximity sensors and modified bug algorithm. In Proceedings of the 2022 10th IEEE International Conference on Control, Mechatronics and Automation (ICCMA), Belval, Luxembourg, 9–12 November 2022; pp. 53–59. [Google Scholar]
- Chen, Y.-S.M.J.-Q.Y.; Luo, G.-C.; Su, X.-L. UAV path planning using artificial potential field method updated by optimal control theory. Int. J. Syst. Sci. 2016, 47, 1407–1420. [Google Scholar] [CrossRef]
- Ulrich, I.; Borenstein, J. VFH+: Reliable obstacle avoidance for fast mobile robots. In Proceedings of the IEEE International Conference on Robotics and Automation, Leuven, Belgium, 20–20 May 1998; Volume 2, pp. 1572–1577. [Google Scholar]
- Srinivasan, D.; Cheu, R.; Poh, Y.; Ng, A. Development of an intelligent technique for traffic network incident detection. Eng. Appl. Artif. Intell. 2000, 13, 311–322. [Google Scholar] [CrossRef]
- Perez-D’Arpino, C.; Medina-Melendez, W.; Guzman, J.; Fermin, L.; Fernandez-Lopez, G. Fuzzy logic based speed planning for autonomous navigation under velocity field control. In Proceedings of the 2009 IEEE International Conference on Mechatronics, Malaga, Spain, 14–17 April 2009; pp. 1–6. [Google Scholar]
- He, R.W.R.; Zhang, Q. UAV autonomous collision avoidance approach. Automatika 2017, 58, 195–204. [Google Scholar] [CrossRef]
- Liu, C.; Zhai, L.; Zhang, X. Research on local real-time obstacle avoidance path planning of unmanned vehicle based on improved artificial potential field method. In Proceedings of the 2022 6th CAA International Conference on Vehicular Control and Intelligence (CVCI), Nanjing, China, 28–30 October 2022; pp. 1–6. [Google Scholar]
- Lu, S.X.; Li, E.; Guo, R. An obstacles avoidance algorithm based on improved artificial potential field. In Proceedings of the 2020 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 2–5 August 2020; pp. 425–430. [Google Scholar]
- Taylor, A.J.; Ames, A.D. Adaptive safety with control barrier functions. In Proceedings of the 2020 American Control Conference (ACC), Denver, CO, USA, 1–3 July 2020; pp. 1399–1405. [Google Scholar]
- Lopez, B.T.; Slotine, J.J.E.; How, J.P. Robust adaptive control barrier functions: An adaptive and data-driven approach to safety. IEEE Control Syst. Lett. 2020, 5, 1031–1036. [Google Scholar] [CrossRef]
- Isaly, A.; Patil, O.S.; Sanfelice, R.G.; Dixon, W.E. Adaptive safety with multiple barrier functions using integral concurrent learning. In Proceedings of the 2021 American Control Conference (ACC), New Orleans, LA, USA, 25–28 May 2021; pp. 3719–3724. [Google Scholar]
- Cohen, M.H.; Belta, C. High order robust adaptive control barrier functions and exponentially stabilizing adaptive control Lyapunov functions. arXiv 2022, arXiv:2203.01999. [Google Scholar]
- Bechlioulis, C.P.; Rovithakis, G.A. Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance. IEEE Trans. Autom. Control 2008, 53, 2090–2099. [Google Scholar] [CrossRef]
- Bai, Y.; Wang, Y.; Xiong, X.; Song, J.; Svinin, M. Safe adaptive multi-agent coverage control. IEEE Control Syst. Lett. 2023, 7, 3217–3222. [Google Scholar] [CrossRef]
- Liu, Y.J.; Tong, S. Barrier Lyapunov functions for Nussbaum gain adaptive control of full state constrained nonlinear systems. Automatica 2017, 76, 143–152. [Google Scholar] [CrossRef]
- Xu, X.; Tabuada, P.; Ames, A.D.; Grizzle, J.W. Robustness of control barrier functions for safety critical control. Proc. IFAC Conf. Anal. Des. Hybrid Syst. 2015, 48, 54–61. [Google Scholar]
- Lavretsky, E.; Gibson, T.E. Projection operator in adaptive systems. arXiv 2011, arXiv:1112.4232. [Google Scholar]
- Ye, D.; Yang, G.-H. Adaptive fault-tolerant tracking control against actuator faults with application to flight control. IEEE Trans. Control Syst. Technol. 2006, 14, 1088–1096. [Google Scholar] [CrossRef]
- Liu, Z.; Yuan, C.; Zhang, Y. Active fault-tolerant control of unmanned quadrotor helicopter using linear parameter varying technique. J. Intell. Robot. Syst. 2017, 88, 415–436. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Lee, S.G.; Diaz-Mercado, Y.; Egerstedt, M. Multirobot Control Using Time-Varying Density Functions. IEEE Trans. Robot. 2015, 31, 489–493. [Google Scholar] [CrossRef]
- Raspimouse_description. Available online: https://github.com/rt-net/raspimouse_description.git (accessed on 5 July 2024).
- Ji, Y.; Ni, L.; Zhao, C.; Lei, C.; Du, Y.; Wang, W. TriPField: A 3D Potential Field Model and Its Applications to Local Path Planning of Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2023, 24, 3541–3554. [Google Scholar] [CrossRef]
- Liu, J.; Yang, J.; Mao, J.; Zhu, T.; Xie, Q.; Li, Y.; Wang, X.; Li, S. Flexible active safety motion control for robotic obstacle avoidance: A CBF-guided MPC approach. IEEE Robot. Autom. Lett. 2025, 10, 2686–2693. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, J.; Svinin, M.; Wakamiya, N. Control for Autonomous Intersection Management Based on Adaptive Control Barrier Function. Appl. Sci. 2025, 15, 2315. https://doi.org/10.3390/app15052315
Song J, Svinin M, Wakamiya N. Control for Autonomous Intersection Management Based on Adaptive Control Barrier Function. Applied Sciences. 2025; 15(5):2315. https://doi.org/10.3390/app15052315
Chicago/Turabian StyleSong, Jie, Mikhail Svinin, and Naoki Wakamiya. 2025. "Control for Autonomous Intersection Management Based on Adaptive Control Barrier Function" Applied Sciences 15, no. 5: 2315. https://doi.org/10.3390/app15052315
APA StyleSong, J., Svinin, M., & Wakamiya, N. (2025). Control for Autonomous Intersection Management Based on Adaptive Control Barrier Function. Applied Sciences, 15(5), 2315. https://doi.org/10.3390/app15052315