
A Multi-Time Scale Hierarchical Coordinated Optimization Operation Strategy for Distribution Networks with Aggregated Distributed Energy Storage

 ,
, 
Abstract
1. Introduction
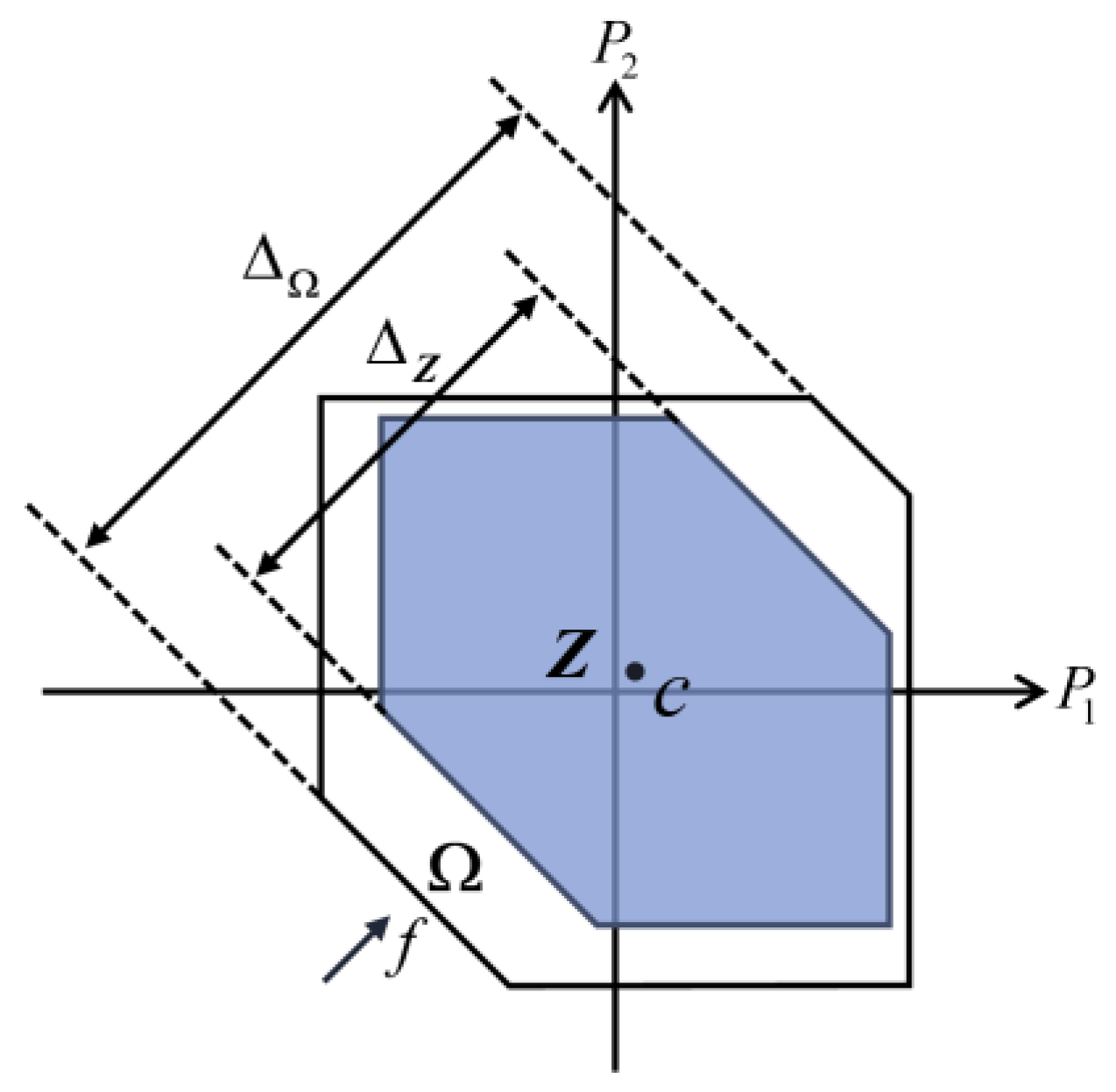
- A DES aggregation method based on the inner approximation of the Minkowski Sum is proposed, where zonotope is employed to characterize the feasible region of individual DES units, resolving the computational intractability of the Minkowski Sum in high-dimensional spaces.
- A multi-time scale hierarchical coordinated optimization operation model for DNs based on scenario analysis and chance constraints is established, which is transformed into a second-order cone programming (SOCP) model based on the second-order cone relaxation and linearization method for quadratic constraint to improve the solution efficiency.
- A power allocation method for the DES cluster based on the water-filling algorithm (WFA) is proposed, which preserves the total power flexibility of the DES cluster to a greater extent.
2. Distributed Energy Storage Aggregation Model Based on Inner Approximation of Minkowski Sum
2.1. Characterization of Feasible Region for Individual Distributed Energy Storage Resources
2.2. Characterization of Feasible Region for Distributed Energy Storage Clusters Based on Zonotope
- Objective functions
- 2.
- Calculation of parameters related to the original feasible region approximation index
- 3.
- Constraints
3. Multi-Time Scale Hierarchical Coordinated Optimization Strategy for Distribution Networks with Aggregated Distributed Energy Storage
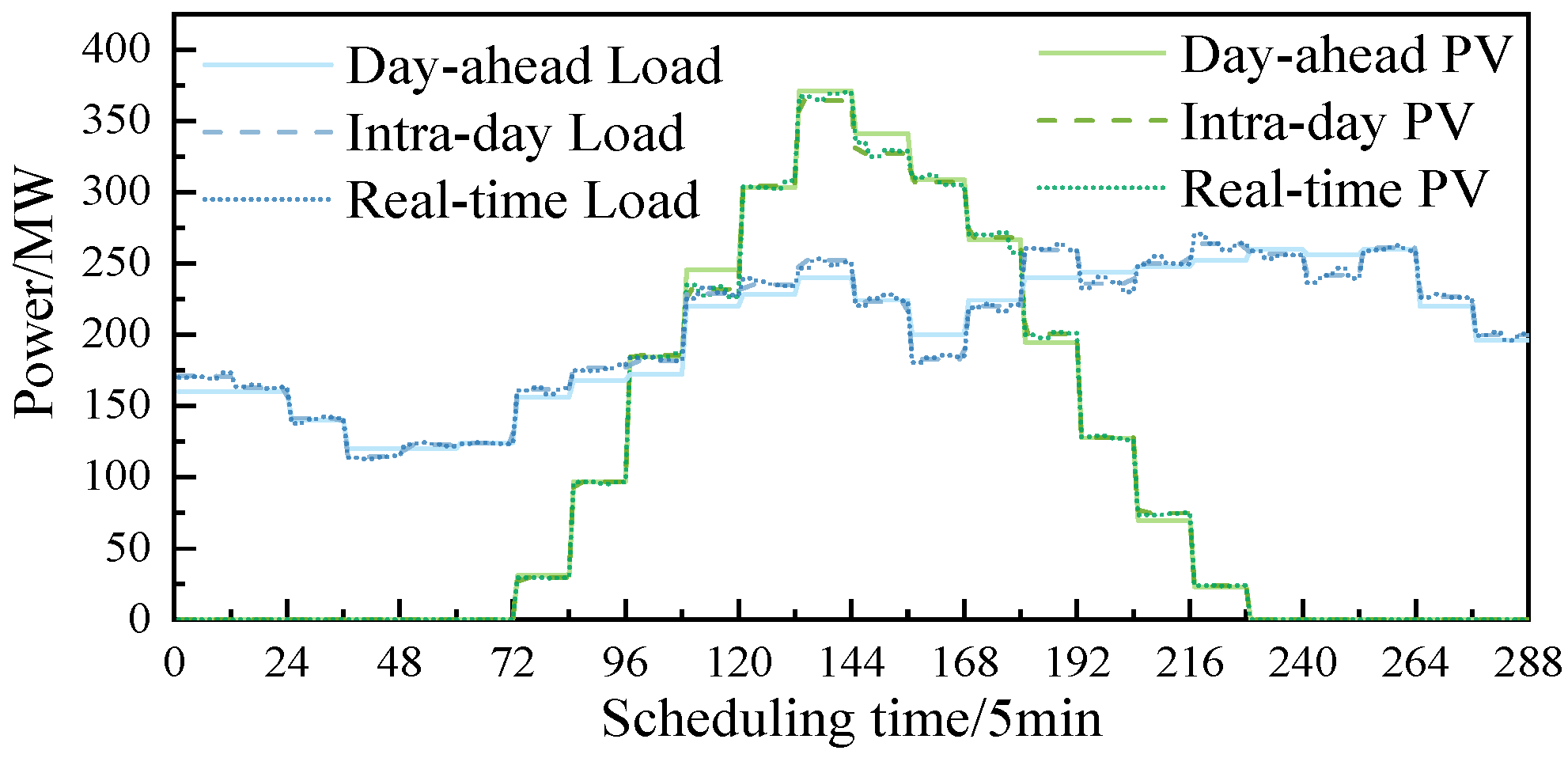
- Day-ahead scheduling: The time scale is set to 1 h, with a scheduling period of 24 h. Considering the wear and tear costs associated with frequent and rapid adjustments of controllable generation units, gas turbines (GTs) are controlled once per hour in the day-ahead scheduling. The day-ahead scheduling determines the on/off states of GTs, power purchase plans from the upstream grid, the participation schedules of DES clusters at each node, and their participation quantities. These determined quantities are then directly fed into the intra-day rolling optimization as fixed variables.
- Intra-day rolling optimization: The time scale is set to 15 min, with an execution cycle of 4 h. During each control cycle, imbalance caused by the output fluctuations of renewable energy units, as well as the load fluctuations of users, is balanced by adjustments from ESS, GTs, and power purchases. In the intra-day scheduling, the on/off states of ESS need to be determined to correct deviations between the day-ahead scheduling plans and actual conditions.
- Real-time coordinated control: The execution cycle is set to 5 min. The objective is to use the intra-day rolling optimization curve as a reference and to implement real-time coordinated control strategies to correct actual operating conditions and minimize deviations.
3.1. Day-Ahead Optimal Scheduling Model
3.1.1. Objective Function
3.1.2. Constraints
- Power Balance Constraint:
- 2.
- GT Operation Constraints:
- 3.
- PV Output Constraints:
- 4.
- ESS Constraints:
- 5.
- DN Power Flow Constraints:
- 6.
- DES Cluster Constraints:
3.2. Intra-Day Rolling Optimization Scheduling Model
3.2.1. Objective Function
3.2.2. Constraints
3.3. Real-Time Optimization Scheduling Model
3.3.1. Objective Function
3.3.2. Constraints
4. Power Allocation Method Within Distributed Energy Storage Aggregates Based on the Water-Filling Algorithm
| Algorithm 1. Water-Filling Algorithm WFA |
| 1. , which divides the range of v into L + 1 intervals. |
| 2. |
| 3. |
| 4. |
| 5. |
| 6. |
| 7. else |
| 8. Update j = j + 1 and return to step 3 |
| 9. end if |
| 10. end for |
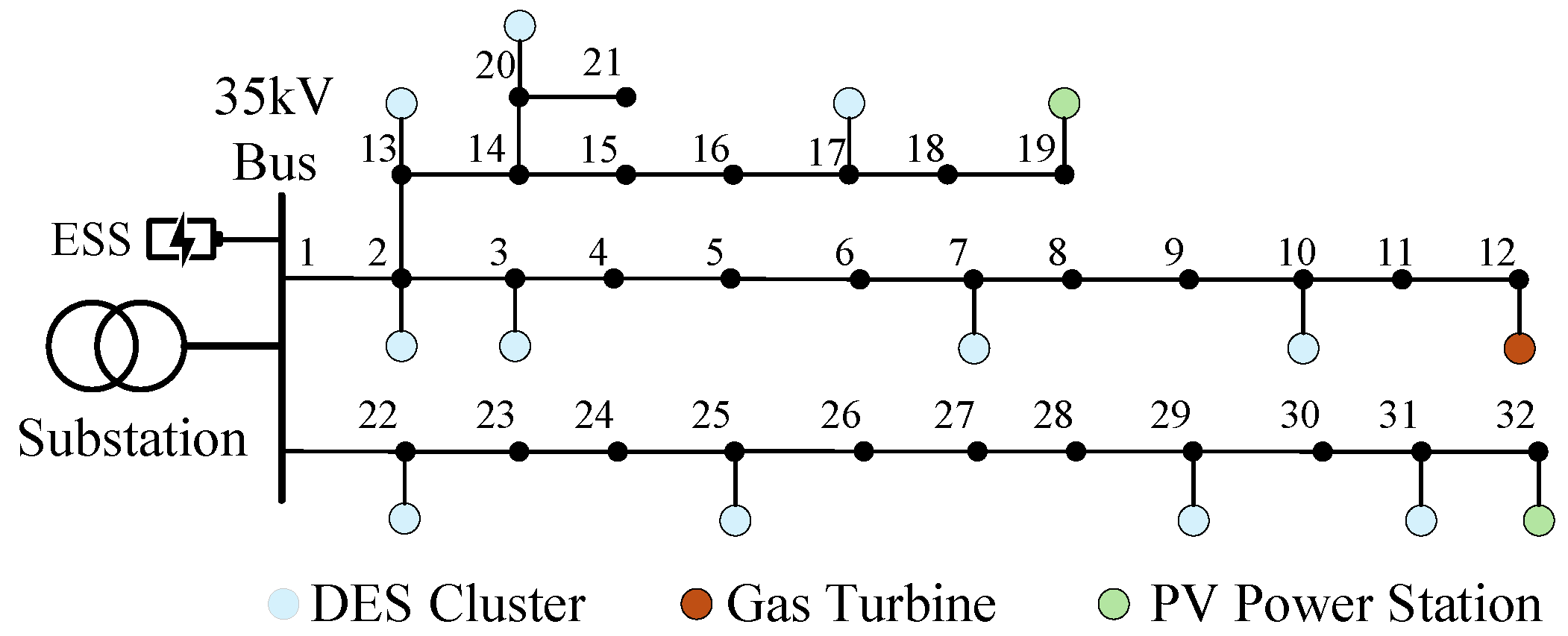
5. Case Studies
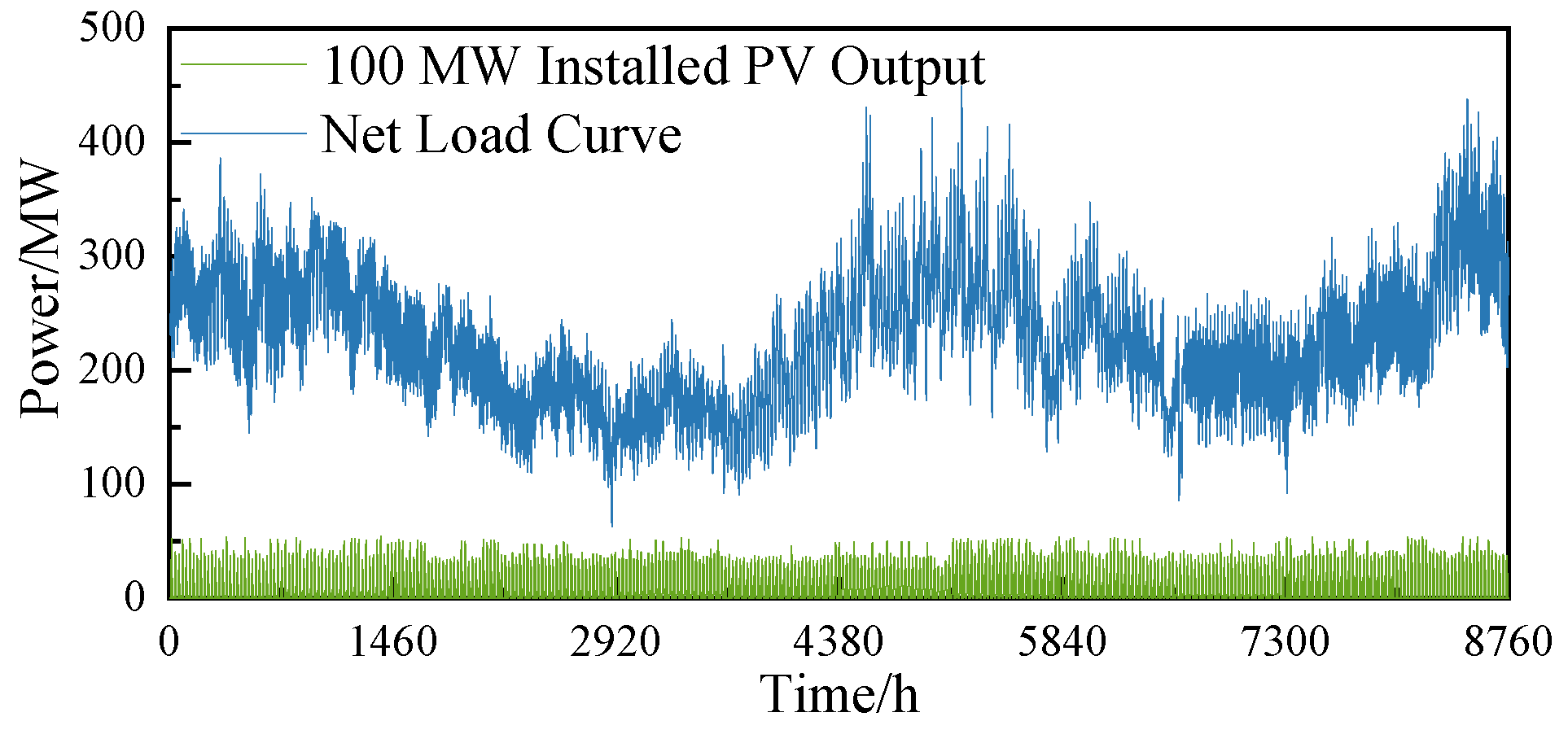
5.1. Regulation Requirements of Distributed Energy Storage
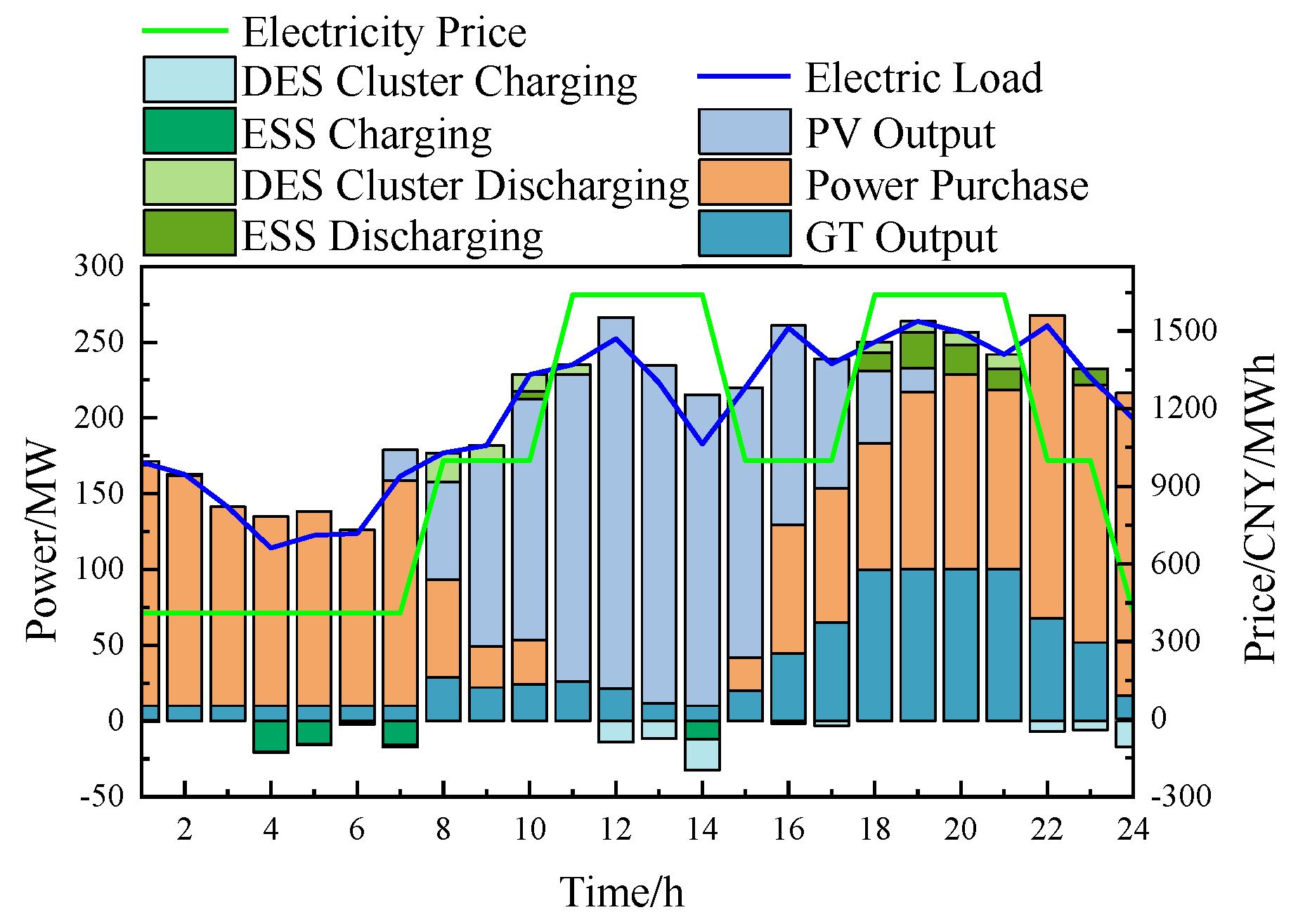
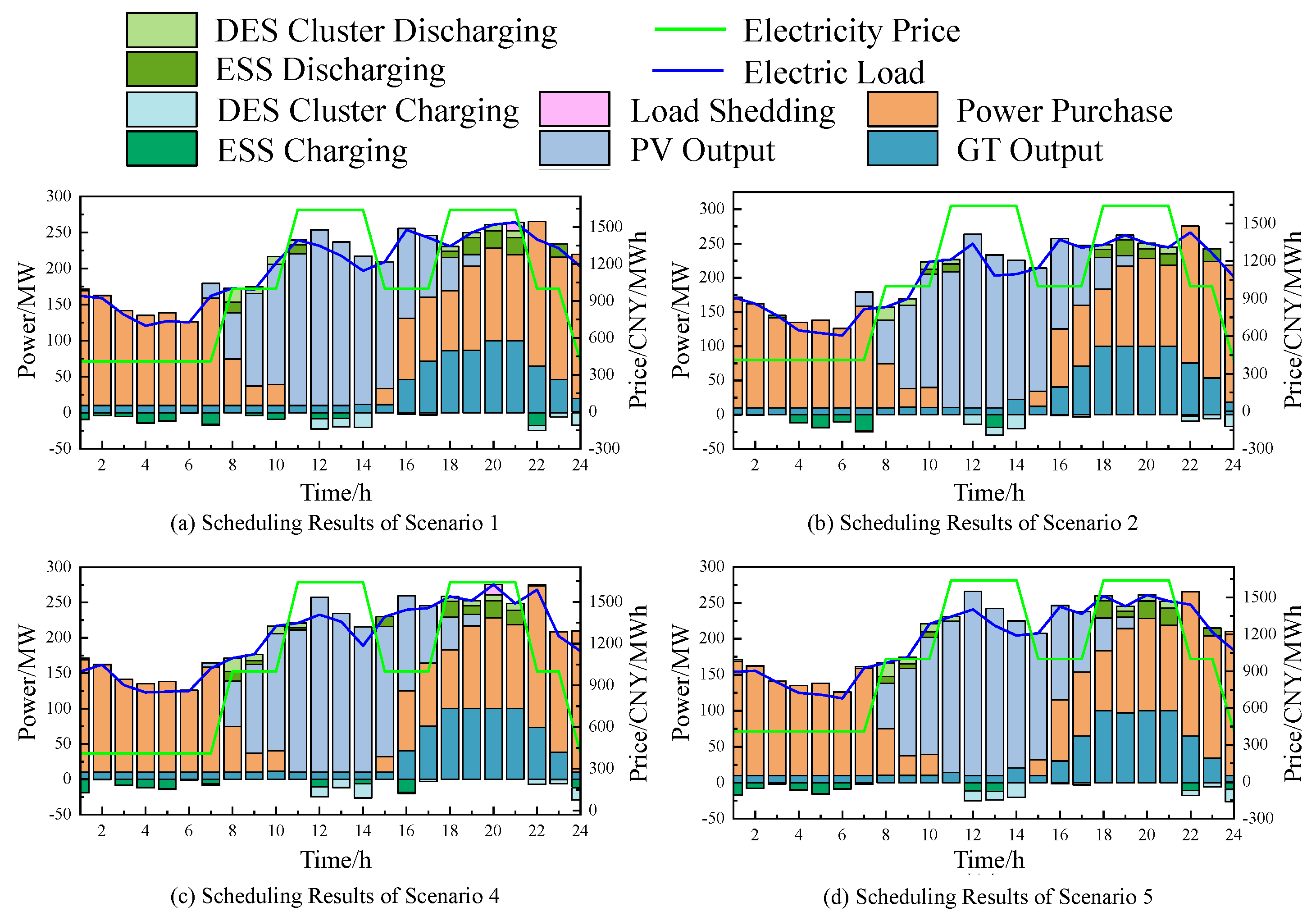
5.2. Analysis of Day-Ahead Scheduling Results
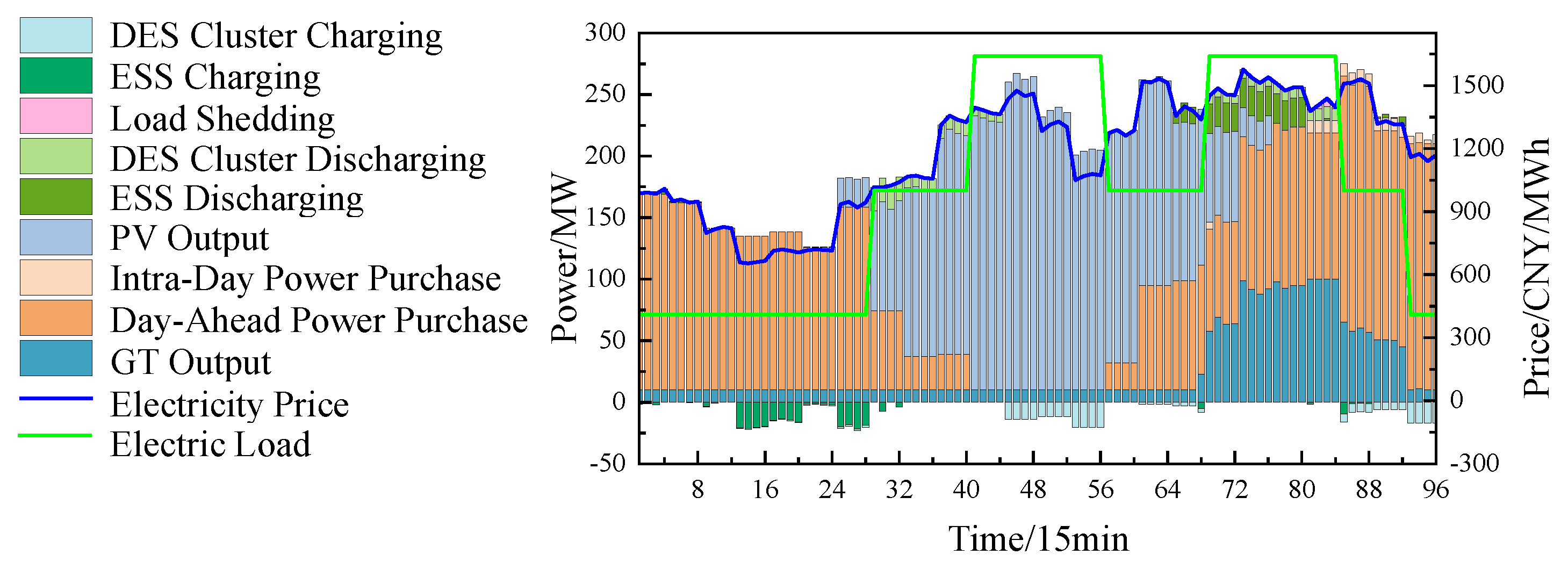
5.3. Analysis of Intra-Day Scheduling Results
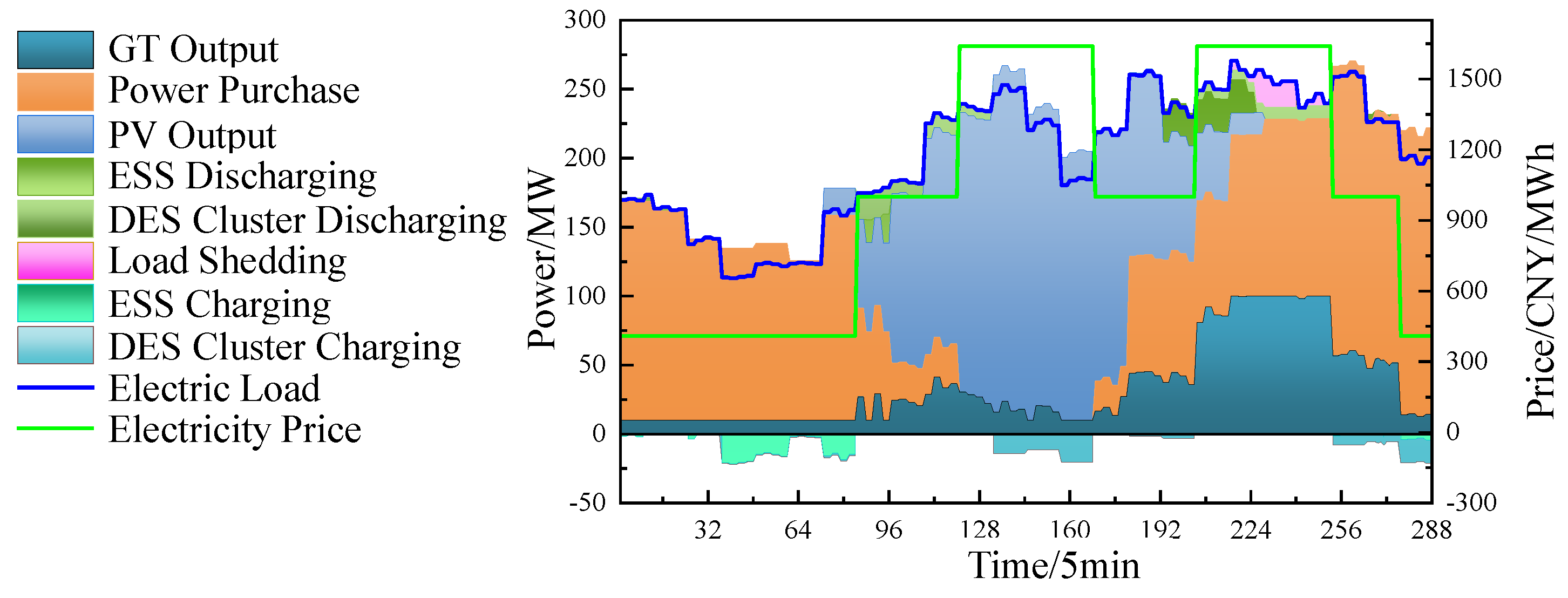
5.4. Real-Time Scheduling Results
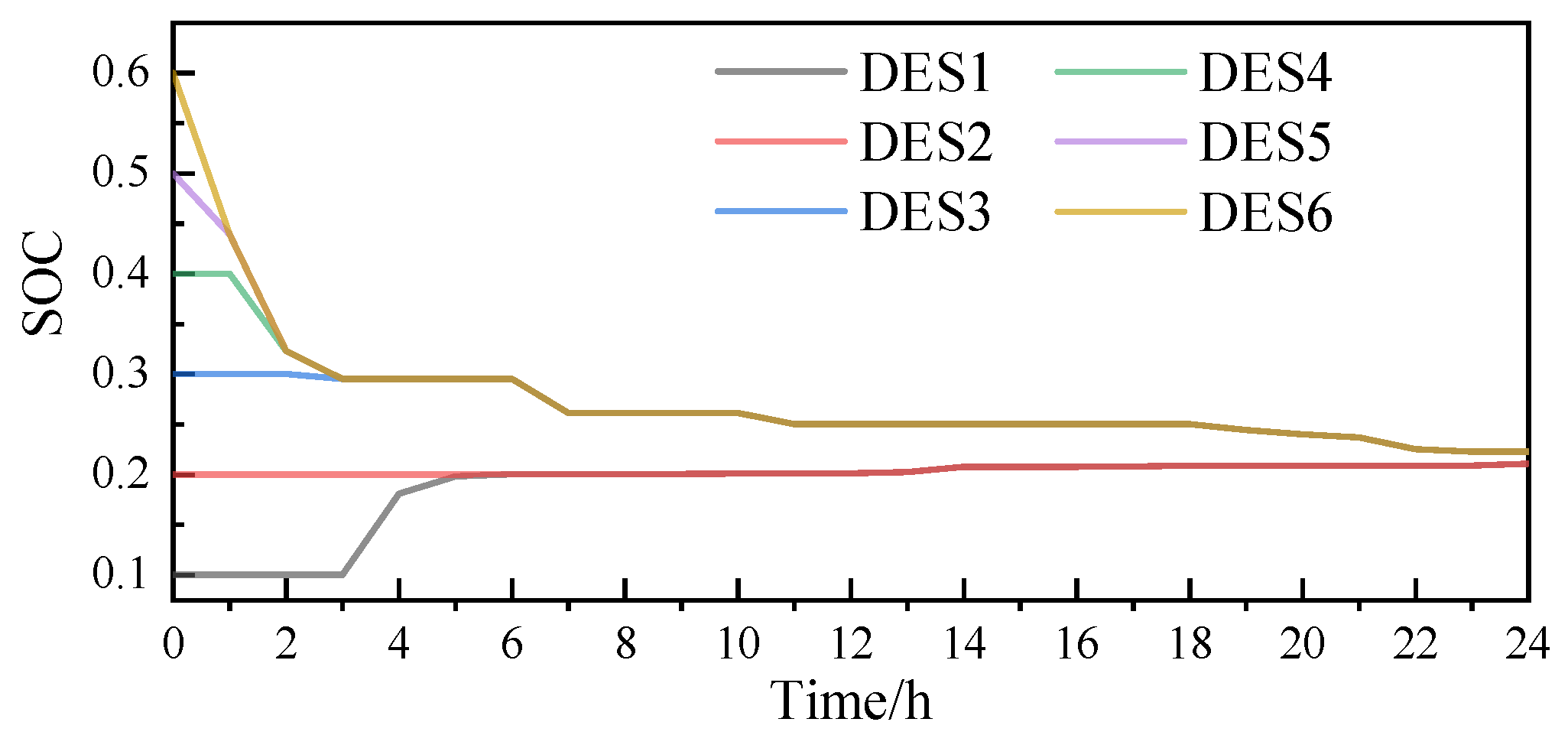
5.5. Power Decomposition Results of Distributed Energy Storage Clusters
5.6. Analysis of the Regulation Efficiency of Distributed Energy Storage
5.6.1. Supply Assurance Effect
5.6.2. Accommodation Effect
5.6.3. Cost and Environmental Value
6. Conclusions
- Considering the participation of DES resource clusters in the optimal operation of DNs can reduce operational costs, improve the operational reliability of the DN, and enhance the renewable energy accommodation rate.
- The proposed multi-time scale optimization operation method effectively utilizes the fast regulation capabilities of ESS and DES resources, thereby improving the accuracy of the system’s response to forecast data.
- The application of the WFA for decomposing control commands of the DES clusters effectively balances the loads of individual DES units, optimizes resource allocation, and provides a feasible solution for large-scale distributed DES deployment.
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cui, Y.; Zhou, H.; Zhong, W.; Li, H.; Zhao, Y. Low-Carbon Scheduling of Power System with Wind Power Considering Uncertainty of Both Source and Load Sides. Electr. Power Autom. Equip. 2020, 40, 85–93. [Google Scholar]
- Li, J.; Sun, H.; Xu, C.; Jing, X.; Jia, G. Research on Distributed Energy Storage Resource Management and Strategy Participating in Demand Response of New Power Systems. Distrib. Util. 2022, 39, 29–35. [Google Scholar]
- Duan, X.; Wang, Y.; Wei, Y.; Li, Y.; Cui, X. DPV and HESS Joint Optimal Configuration in Distribution Network Considering Renewable Energy Consumption. Mod. Electr. Power, 2024; ahead of print. [Google Scholar] [CrossRef]
- Wang, C.; Shi, Z.; Liang, Z.; Li, Q.; Hong, B.; Huang, B.; Jiang, L. Key Technologies and Prospects of Demand-Side Resource Utilization for Power Systems Dominated by Renewable Energy. Autom. Electr. Power Syst. 2021, 45, 37–48. [Google Scholar]
- Sun, L.; Li, H.; Jia, Q.; Fu, L.; Zhang, G. Planning Method for Resource Aggregation of Virtual Power Plant Based on Dynamic Reconstruction. Autom. Electr. Power Syst. 2024, 48, 115–128. [Google Scholar]
- Zhuang, Y.; Li, Z.; Tan, Q.; Li, Y.; Wan, M. Multi-Time-Scale Resource Allocation Based on Long-Term Contracts and Real-Time Rental Business Models for Shared Energy Storage Systems. J. Mod. Power Syst. Clean Energy 2024, 12, 454–465. [Google Scholar] [CrossRef]
- Kwon, K.; Lee, H.-B.; Kim, N.; Park, S.; Joshua, S.R. Integrated Battery and Hydrogen Energy Storage for Enhanced Grid Power Savings and Green Hydrogen Utilization. Appl. Sci. 2024, 14, 7631. [Google Scholar] [CrossRef]
- Yin, Q. Scale Distributed Energy Storage Aggregation Modeling and Cooperative Optimized Regulation Strategy. Ph.D. Thesis, North China Electric Power University, Beijing, China, 2019. [Google Scholar]
- He, S.; Zhang, J.; Gu, Z.; Shi, X.; Jiang, H. Overview of Virtual Power Plant Modeling and Optimization Control for Distributed Resource Aggregation and Control. Shandong Electr. Power. 2024, 51, 11–24. [Google Scholar]
- Liu, Q.; Yang, S.; Liu, X. Analysis and Prospect of Distributed Energy Storage Business Modes. Power Demand Side Manag. 2023, 25, 67–73. [Google Scholar]
- Wang, S.; Wu, W. Aggregation Reference Model and Quantitative Metric System of Flexible Energy Resources. Autom. Electr. Power Syst. 2024, 48, 1–9. [Google Scholar]
- Zhang, H.; Chang, L.; Cao, L.; Lu, J. Research on Demand Side Resource Feasible Region Aggregation Based on Improved Zonotope. Power Demand Side Manag. 2024, 26, 1–7. [Google Scholar]
- Zhang, L.; Fan, Y.; Wang, Y.; Zhou, B.; Dou, Q. Flexible Aggregation and Coordinated Scheduling Strategy for Renewable Powered 5G Communication Base Station Clusters. Power Syst. Prot. Control. 2024, 52, 101–110. [Google Scholar]
- Barot, S.; Taylor, J.A. A Concise, Approximate Representation of a Collection of Loads Described by Polytopes. Int. J. Electr. Power Energy Syst. 2017, 84, 55–63. [Google Scholar] [CrossRef]
- Zhao, W.; Huang, H.; Zhu, J.; Zhou, B.; Chen, J.; Luo, Y. Flexible Resource Cluster Response Based on Inner Approximate and Constraint Space Integration. Power Syst. Technol. 2023, 47, 2621–2632. [Google Scholar]
- Wen, Y.; Hu, Z.; You, S.; Duan, X. Aggregate Feasible Region of DERs: Exact Formulation and Approximate Models. IEEE Trans. Smart Grid 2022, 13, 4405–4423. [Google Scholar] [CrossRef]
- Chen, X.; Li, N. Leveraging Two-Stage Adaptive Robust Optimization for Power Flexibility Aggregation. IEEE Trans. Smart Grid 2021, 12, 3954–3965. [Google Scholar] [CrossRef]
- Lv, Y.; Li, K.; Zhao, H.; Lei, H. A Multi-Stage Constraint-Handling Multi-Objective Optimization Method for Resilient Microgrid Energy Management. Appl. Sci. 2024, 14, 3253. [Google Scholar] [CrossRef]
- Jin, L.; Fang, X.; Cai, Z.; Chen, D.; Li, Y. Multiple Time-Scales Source-Storage-Load Coordination Scheduling Strategy of Grid Connected to Energy Storage Power Station Considering Characteristic Distribution. Power Syst. Technol. 2020, 44, 3641–3650. [Google Scholar]
- Chen, Y.; Qi, D.; Dong, H.; Li, C.; Li, Z.; Zhang, J. A FDI Attack-Resilient Distributed Secondary Control Strategy for Islanded Microgrids. IEEE Trans. Smart Grid 2021, 12, 1929–1938. [Google Scholar] [CrossRef]
- Dong, W.; Zhang, F.; Li, M.; Fang, X.; Yang, Q. Imitation Learning Based Real-Time Decision-Making of Microgrid Economic Dispatch Under Multiple Uncertainties. J. Mod. Power Syst. Clean Energy 2024, 12, 1183–1193. [Google Scholar]
- Cui, Y.; Zhou, H.; Zhong, W.; Hui, X.; Zhao, Y. Two-Stage Day-Ahead and Intra-Day Rolling Optimization Scheduling Considering Joint Peak Regulation of Generalized Energy Storage and Thermal Power. Power Syst. Technol. 2021, 45, 10–20. [Google Scholar]
- Zhou, H. Optimal Dispatch of Wind Power System Considering Source-Load-Storage Joint Peak Shaving. Ph.D. Thesis, Northeast Electric Power University, Beijing, China, 2021. [Google Scholar]
- Pan, P.; Wang, Z.; Chen, G.; Shi, H.; Zha, X. Multi-Time Scale Optimal Dispatch of Distribution Network with Pumped Storage Station Based on Model Predictive Control. Appl. Sci. 2024, 14, 11122. [Google Scholar] [CrossRef]
- Huang, X.; Qi, D.; Chen, Y.; Yan, Y.; Yang, S.; Wang, Y.; Wang, X. Distributed Self-Triggered Privacy-Preserving Secondary Control of VSG-Based AC Microgrids. IEEE Trans. Smart Grid, 2024; ahead of print. [Google Scholar] [CrossRef]
- Chen, Z.; Li, Z.; Lin, D.; Xie, C.; Wang, Z. Multi-Time-Scale Optimal Scheduling of Integrated Energy System with Electric-Thermal-Hydrogen Hybrid Energy Storage under Wind and Solar Uncertainties. J. Mod. Power Syst. Clean Energy, 2024; ahead of print. [Google Scholar] [CrossRef]
- Li, H.; Yu, H.; Liu, Z.; Li, F.; Wu, X.; Cao, B.; Zhang, C.; Liu, D. Long-Term Scenario Generation of Renewable Energy Generation Using Attention-Based Conditional Generative Adversarial Networks. Energy Convers. Economics 2024, 5, 15–27. [Google Scholar] [CrossRef]
- Trangbaek, K.; Bendtsen, J. Exact Constraint Aggregation with Applications to Smart Grids and Resource Distribution. In Proceedings of the 2012 IEEE 51st Conference on Decision and Control (CDC), Maui, HI, USA, 10–13 December 2012; pp. 4181–4186. [Google Scholar]
- Tang, J.; Lü, L.; Ye, Y.; Xu, L.; He, X.; Wang, L. Source-Storage-Load Coordinated Economic Dispatch of An Active Distribution Network under Multiple Time Scales. Power Syst. Prot. Control 2021, 49, 53–64. [Google Scholar]
- Hou, H.; Wang, Z.; Zhao, B.; Zhang, L.; Shi, Y.; Xie, C.; Dong, Z.; Yu, K. Distributed Optimization for Joint Peer-to-Peer Electricity and Carbon Trading Among Multi-Energy Microgrids Considering Renewable Generation Uncertainty. Energy Convers. Economics 2024, 5, 116–131. [Google Scholar] [CrossRef]
- Fu, X.; Yu, S.; He, Q.; Wang, L.; Chen, C.; Niu, C.; Lin, Z. Distributed Cooperative Dispatch Method of Distribution Network with District Heat Network and Battery Energy Storage System Considering Flexible Regulation Capability. Appl. Sci. 2024, 14, 7699. [Google Scholar] [CrossRef]
- Kamgarpour, M.; Ellen, C.; Soudjani, S.E.Z.; Gerwinn, S.; Mathieu, J.L.; Müllner, N. Modeling Options for Demand Side Participation of Thermostatically Controlled Loads. In Proceedings of the IREP Symposium Bulk Power System Dynamics and Control—IX Optimization, Security and Control of the Emerging Power Grid, Rethymno, Greece, 25–30 August 2013; pp. 1–15. [Google Scholar]
- Müller, F.L.; Szabó, J.; Sundström, O.; Lygeros, J. Aggregation and Disaggregation of Energetic Flexibility from Distributed Energy Resources. IEEE Trans. Smart Grid 2019, 10, 1205–1214. [Google Scholar] [CrossRef]
- Liu, C.; Pang, P.; Shi, W.; Shen, J.; Sun, Y.; Bao, H. Taking into Account Carbon Neutrality Benefit and Clean Energy Consumption of Virtual Power Plant Two-layer Cooperative Optimization Dispatching. Distrib. Utiliz. 2021, 38, 19–27. [Google Scholar]
- Xu, W.; Mi, Y.; Cai, P.; Li, X.; Jia, Z.; Li, X. Distributed Optimization Management for Active Distribution Networks with Multiple Microgrids Based on Chance-Constrained Programming. Electr. Power Constr. 2024, 45, 1–13. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pmax/MW | Pmin/MW | a/($/(MW))2 | b/($/MW) | C/$ | Climbing Rate/(MW/h) | Minimum Switching Time/h |
|---|---|---|---|---|---|---|
| 100 | 10 | 0.375 | 400 | 375 | 35 | 2 |
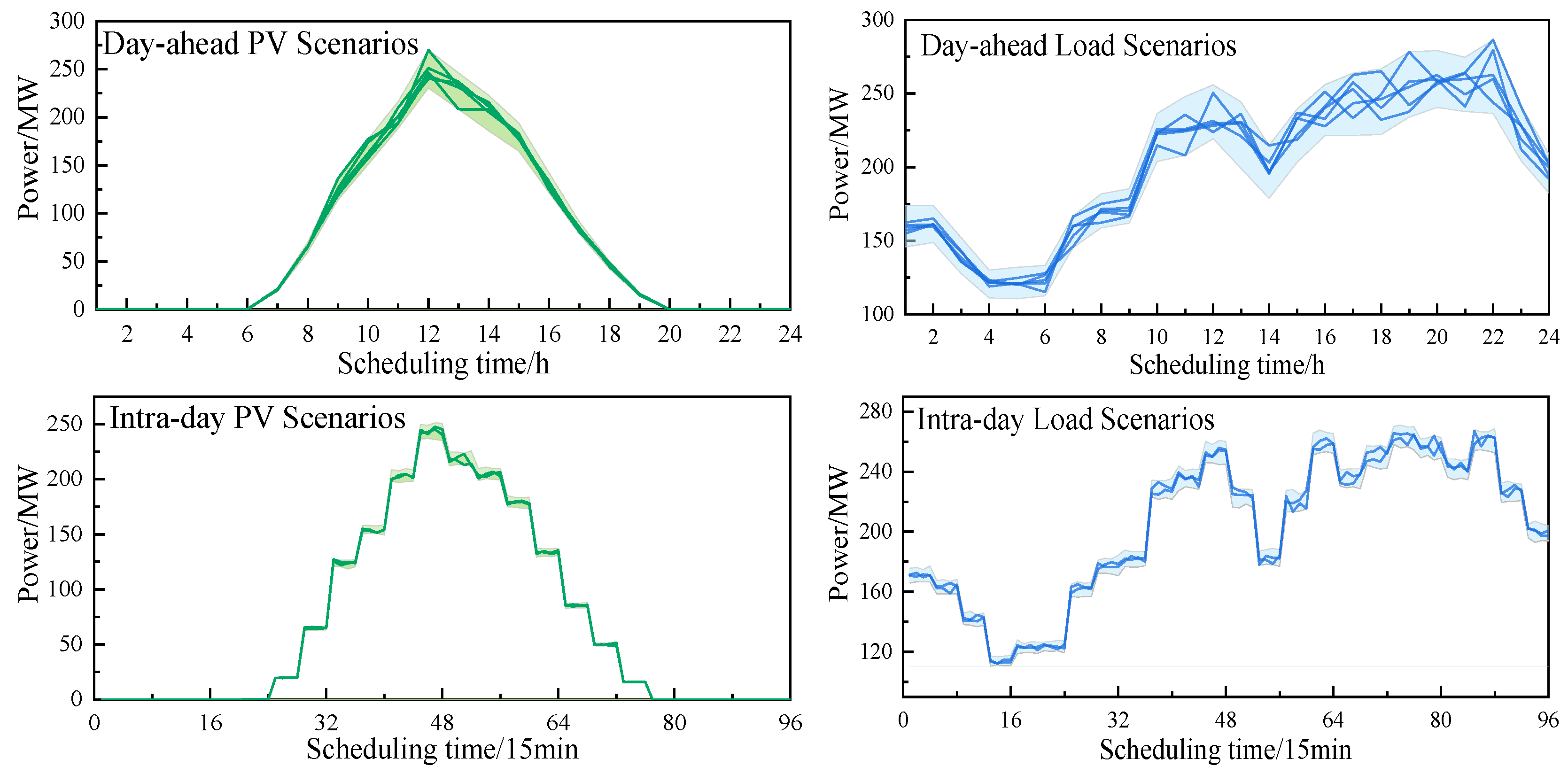
| Scenarios | Probabilities |
|---|---|
| 1 | 0.01 |
| 2 | 0.22 |
| 3 | 0.455 |
| 4 | 0.125 |
| 5 | 0.19 |
| Scenarios | Probabilities |
|---|---|
| 1 | 0.565 |
| 2 | 0.435 |
| Scenarios | Voltage Overrun | Power Overrun | Overload |
|---|---|---|---|
| Before DES Integration | 2.47% | 0.65% | 6.46% |
| After DES Integration | 0% | 0% | 0% |
| Scenarios | Accommodation Rate Before DES Integration | Accommodation Rate After DES Integration |
|---|---|---|
| 1 | 95.90% | 100% |
| 2 | 96.67% | 100% |
| 3 | 97.36% | 100% |
| 4 | 96.20% | 99.14% |
| 5 | 96.58% | 98.95% |
| Scenarios | Carbon Emission Allowance | Carbon Emissions | Carbon Emission Cost |
|---|---|---|---|
| Before DES Integration | 2407.9 T | 1633.2 T | −38,736 CNY |
| After DES Integration | 2399.4 T | 1607.4 T | −39,605 CNY |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Niu, C.; Zhang, Y.; Xie, A.; Lu, R.; Yu, S.; Qiao, S.; Lin, Z. A Multi-Time Scale Hierarchical Coordinated Optimization Operation Strategy for Distribution Networks with Aggregated Distributed Energy Storage. Appl. Sci. 2025, 15, 2075. https://doi.org/10.3390/app15042075
Liu J, Niu C, Zhang Y, Xie A, Lu R, Yu S, Qiao S, Lin Z. A Multi-Time Scale Hierarchical Coordinated Optimization Operation Strategy for Distribution Networks with Aggregated Distributed Energy Storage. Applied Sciences. 2025; 15(4):2075. https://doi.org/10.3390/app15042075
Chicago/Turabian StyleLiu, Junhui, Chengeng Niu, Yihan Zhang, Anbang Xie, Rao Lu, Shunjiang Yu, Siyuan Qiao, and Zhenzhi Lin. 2025. "A Multi-Time Scale Hierarchical Coordinated Optimization Operation Strategy for Distribution Networks with Aggregated Distributed Energy Storage" Applied Sciences 15, no. 4: 2075. https://doi.org/10.3390/app15042075
APA StyleLiu, J., Niu, C., Zhang, Y., Xie, A., Lu, R., Yu, S., Qiao, S., & Lin, Z. (2025). A Multi-Time Scale Hierarchical Coordinated Optimization Operation Strategy for Distribution Networks with Aggregated Distributed Energy Storage. Applied Sciences, 15(4), 2075. https://doi.org/10.3390/app15042075