Fractional-Order Sliding Mode with Active Disturbance Rejection Control for UAVs


Abstract
1. Introduction
- We introduce a fractional-order calculus operator into the reaching law of the SMC and replace the sign function with a hyperbolic tangent function to obtain strong robustness and immunity to interference.
- We use the output of the FOSMC as the input to the ADRC, and the problem of high-frequency oscillation at the output of the FOSMC is well solved after ADRC processing.
- The FOSM-ADRC strategy is proposed; the controller is divided into two rings. The inner ring uses ADRC to obtain a strong anti-interference ability, and the outer ring uses the FOSMC to obtain a faster response speed and strong robustness.
2. Quadrotor Dynamics Model
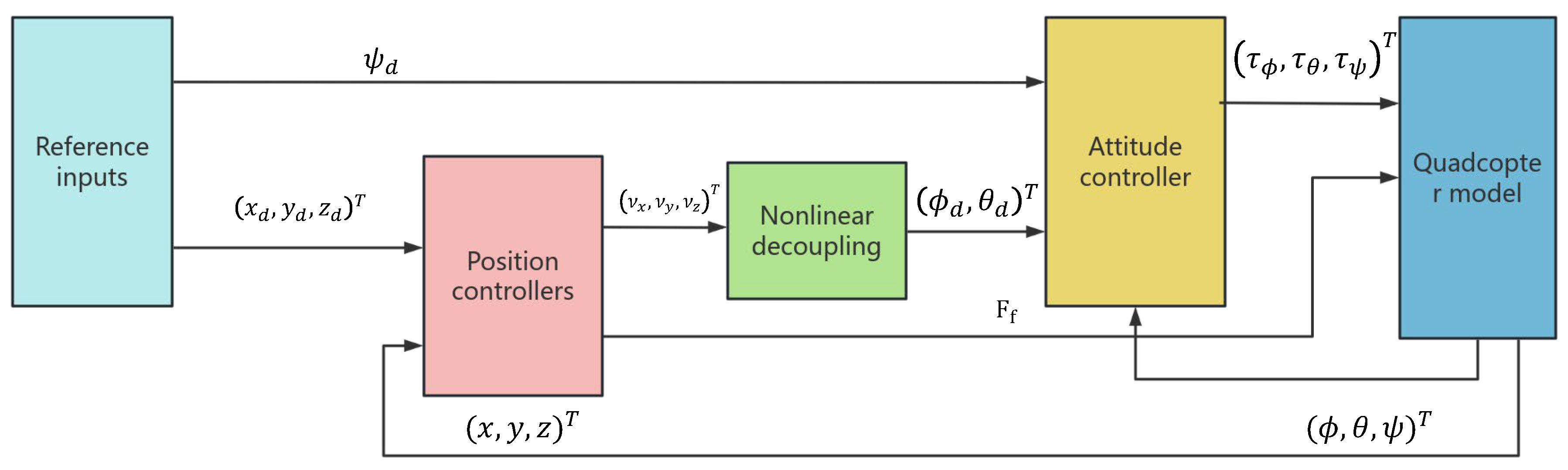
3. Flight Controller Design
3.1. External Loop Controller (Fractional Order Convergence Law Smooth Mode Controller Design)
- Stability analysis
3.2. Inner Loop Controller (Active Disturbance Rejection Controller Design)
4. Experiments and Results
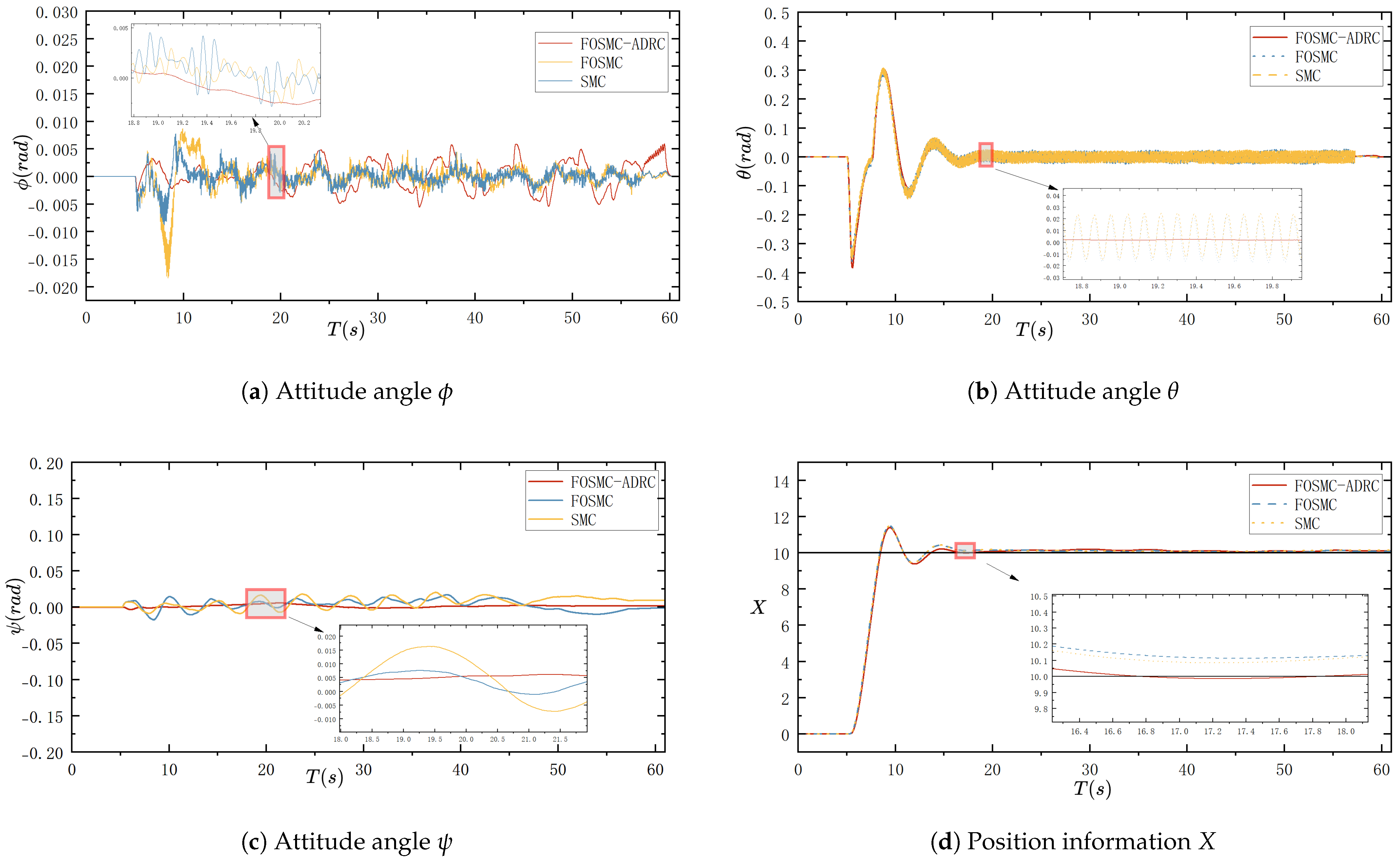
4.1. Analysis of Experimental Results Without Interference
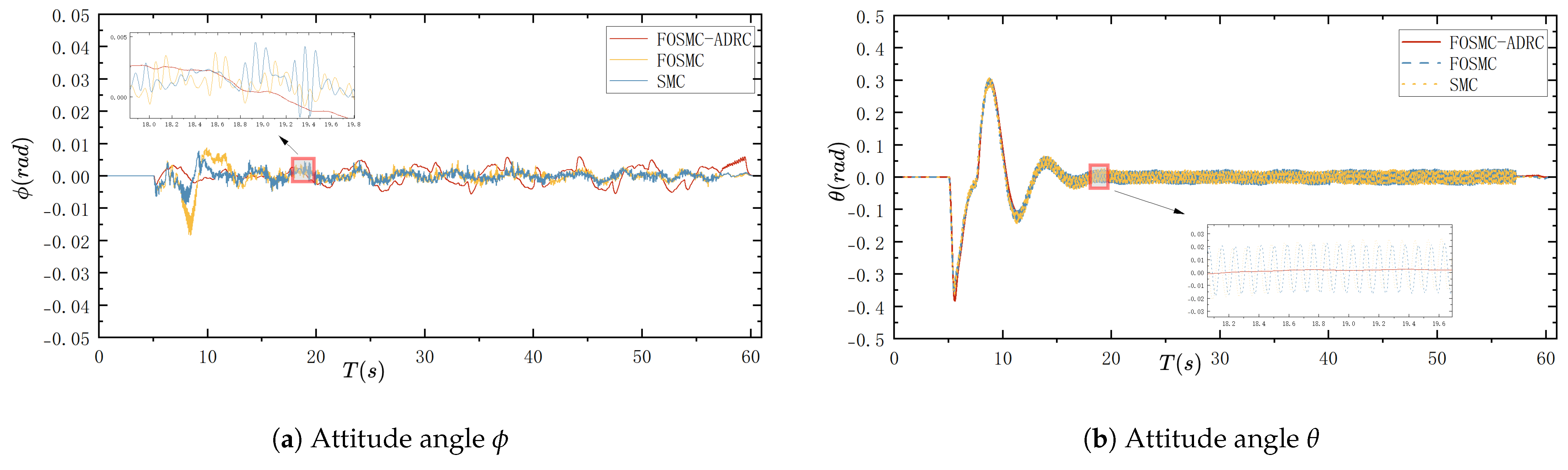
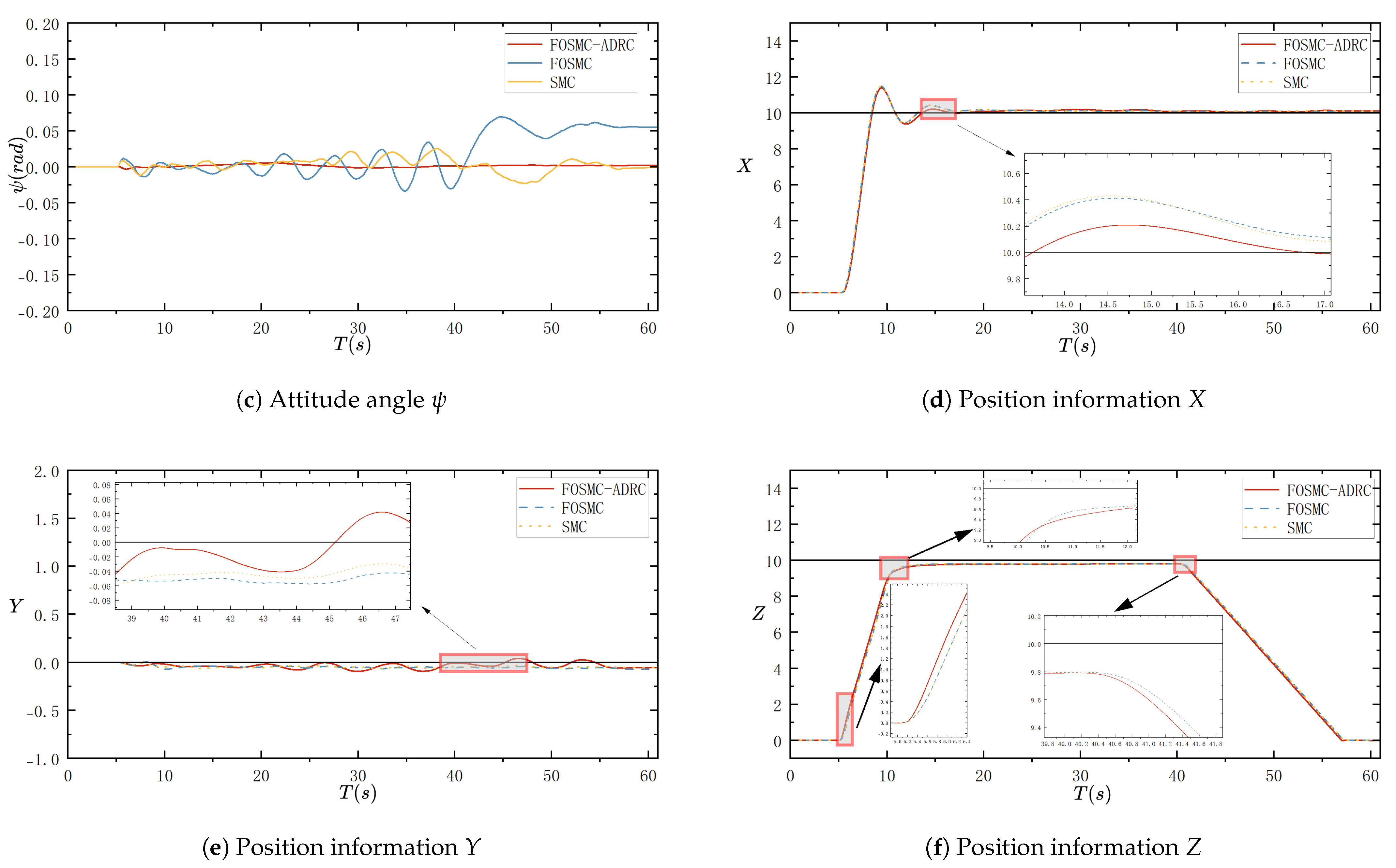
4.2. Analysis of Experimental Results in Case of Weak Interference
4.3. Analysis of Experimental Results in Case of Strong Interference
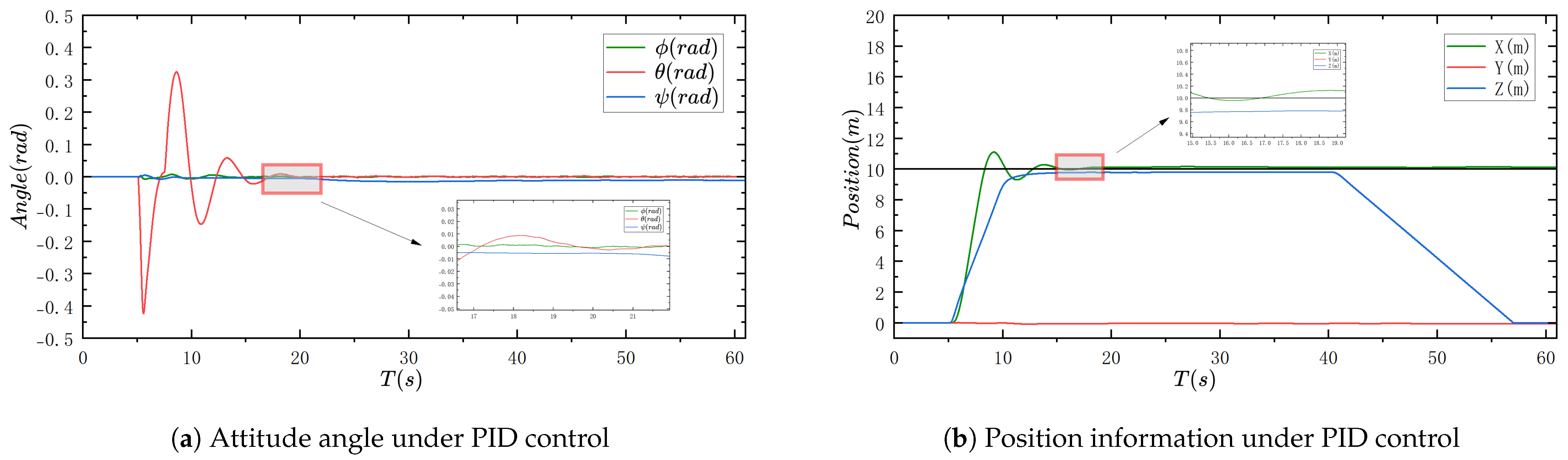
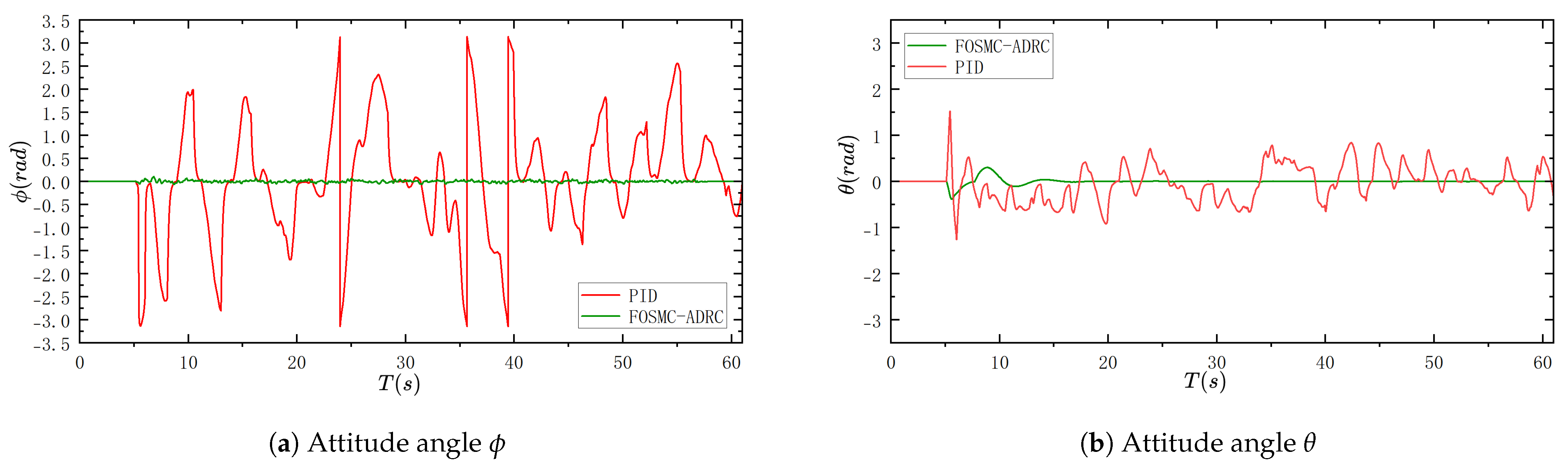
4.4. Analysis of Comparative Experiments of FOSM-ADRC and PID in Case of Strong Interference
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| UAVs | Unmanned aerial vehicles |
| SMC | Sliding mode controller |
| FO-SMC | Fractional-order reaching law sliding mode controller |
| ADRC | Active disturbance rejection controller |
| FOSM-ADRC | Fractional-order reaching law sliding mode with active disturbance rejection controller |
| ESO | Extended state observer |
| PID | Proportional–integral–derivative |
| LQR | Linear quadratic regulator |
| NLSEF | Nonlinear State Error Feedback Control Law |
| FMT | Firmament |
| MBD | Model-based design |
References
- Guo, Y.; Jiang, B.; Zhang, Y. A novel robust attitude control for quadrotor aircraft subject to actuator faults and wind gusts. IEEE/CAA J. Autom. Sin. 2017, 5, 292–300. [Google Scholar] [CrossRef]
- Mahony, R.; Kumar, V.; Corke, P. Multirotor aerial vehicles: Modeling, estimation, and control of quadrotor. IEEE Robot. Autom. Mag. 2012, 19, 20–32. [Google Scholar] [CrossRef]
- Noordin, A.; Mohd Basri, M.A.; Mohamed, Z.; Mat Lazim, I. Adaptive PID Controller Using Sliding Mode Control Approaches for Quadrotor UAV Attitude and Position Stabilization. Arab. J. Sci. Eng. 2021, 46, 963–981. [Google Scholar] [CrossRef]
- Elkhatem, A.S.; Engin, S.N. Robust LQR and LQR-PI control strategies based on adaptive weighting matrix selection for a UAV position and attitude tracking control. Alex. Eng. J. 2022, 61, 6275–6292. [Google Scholar] [CrossRef]
- Lopez, J.; Dormido, R.; Dormido, S.; Gomez, J.P. A robust H∞ controller for an UAV flight control system. Sci. World J. 2015, 2015, 403236. [Google Scholar] [CrossRef]
- Baek, J.; Jin, M.; Han, S. A new adaptive sliding-mode control scheme for application to robot manipulators. IEEE Trans. Ind. Electron. 2016, 63, 3628–3637. [Google Scholar] [CrossRef]
- Wang, J.; Alattas, K.A.; Bouteraa, Y.; Mofid, O.; Mobayen, S. Adaptive finite-time backstepping control tracker for quadrotor UAV with model uncertainty and external disturbance. Aerosp. Sci. Technol. 2023, 133, 108088. [Google Scholar] [CrossRef]
- Gao, B.; Liu, Y.-J.; Liu, L. Adaptive neural fault-tolerant control of a quadrotor UAV via fast terminal sliding mode. Aerosp. Sci. Technol. 2022, 129, 107818. [Google Scholar] [CrossRef]
- Nguyen, S.D.; Lam, B.D.; Ngo, V.H. Fractional-order sliding-mode controller for semi-active vehicle MRD suspensions. Nonlinear Dyn. 2020, 101, 795–821. [Google Scholar] [CrossRef]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Wang, S.; Chen, J.; He, X. An adaptive composite disturbance rejection for attitude control of the agricultural quadrotor UAV. ISA Trans. 2022, 129, 564–579. [Google Scholar] [CrossRef] [PubMed]
- Ran, M.; Wang, Q.; Dong, C.; Xie, L. Active disturbance rejection control for uncertain time-delay nonlinear systems. Automatica 2020, 112, 108692. [Google Scholar] [CrossRef]
- Zhu, E.; Pang, J.; Sun, N.; Gao, H.; Sun, Q.; Chen, Z. Airship horizontal trajectory tracking control based on active disturbance rejection control (ADRC). Nonlinear Dyn. 2014, 75, 725–734. [Google Scholar] [CrossRef]
- Li, B.; Gong, W.; Yang, Y.; Xiao, B.; Ran, D. Appointed Fixed Time Observer-Based Sliding Mode Control for a Quadrotor UAV Under External Disturbances. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 290–303. [Google Scholar] [CrossRef]
- Xu, L.-X.; Ma, H.-J.; Guo, D.; Xie, A.-H.; Song, D.-L. Backstepping Sliding-Mode and Cascade Active Disturbance Rejection Control for a Quadrotor UAV. IEEE/ASME Trans. Mechatron. 2020, 25, 2743–2753. [Google Scholar] [CrossRef]
- Quan, Q. Introduction to Multicopter Design and Control; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Xiong, J.-J.; Zhang, G. Discrete-time sliding mode control for a quadrotor UAV. Optik 2016, 127, 3718–3722. [Google Scholar] [CrossRef]
- Xiong, J.-J.; Zheng, E.-H. Position and attitude tracking control for a quadrotor UAV. ISA Trans. 2014, 53, 725–731. [Google Scholar] [CrossRef]
- JcZou. Firmament-Autopilot/FMT-Firmware. GitHub Repository. 2024. Available online: https://github.com/Firmament-Autopilot/FMT-Firmware (accessed on 29 September 2024).
- Liu, Y.; Wang, Z.; Xiong, L.; Wang, J.; Jiang, X.; Bai, G.; Li, R.; Liu, S. DFIG wind turbine sliding mode control with exponential reaching law under variable wind speed. Int. J. Electr. Power Energy Syst. 2018, 96, 253–260. [Google Scholar] [CrossRef]
- Xiong, J.-J.; Zhang, G.-B. Global fast dynamic terminal sliding mode control for a quadrotor UAV. ISA Trans. 2017, 66, 233–240. [Google Scholar] [CrossRef]
- Diethelm, K.; Ford, N.J.; Freed, A.D. A predictor-corrector approach for the numerical solution of fractional differential equations. Nonlinear Dyn. 2002, 29, 3–22. [Google Scholar] [CrossRef]
- Yang, N.; Liu, C. A novel fractional-order hyperchaotic system stabilization via fractional sliding-mode control. Nonlinear Dyn. 2013, 74, 721–732. [Google Scholar] [CrossRef]
- Odibat, Z. Approximations of fractional integrals and Caputo fractional derivatives. Appl. Math. Comput. 2006, 178, 527–533. [Google Scholar] [CrossRef]
- Zhao, L.; Dai, L.W.; Xia, Y.Q.; Li, P. Attitude control for quadrotors subjected to wind disturbances via active disturbance rejection control and integral sliding mode control. Mech. Syst. Signal Process. 2019, 129, 531–545. [Google Scholar] [CrossRef]
- Wang, Z.; Zhao, T. Based on robust sliding mode and linear active disturbance rejection control for attitude of quadrotor load UAV. Nonlinear Dyn. 2022, 108, 3485–3503. [Google Scholar] [CrossRef]
- Yin, Z.; Du, C.; Liu, J.; Sun, X.; Zhong, Y. Research on autodisturbance-rejection control of induction motors based on an ant colony optimization algorithm. IEEE Trans. Ind. Electron. 2017, 65, 3077–3094. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| m | 0.886 | kg |
| l | 0.225 | m |
| 0.001 | Ns/m | |
| 0.016 | Ns2/rad | |
| 0.0274 | Ns2/rad | |
| 0.02 | Ns2/rad | |
| g | 9.8067 | m/s2 |
| b | 5 | Ns2 |
| d | N/(rad/s)2 |
| 7 | 0.95 | 0.5 | 0.01 | |
| 7.5 | 0.95 | 0.5 | 0.01 | |
| 6.8 | 1 | 0.5 | 0.0055 |
| 0.1 | 0.1 | 0.003 | 500 | 1800 | 300 | |
| 0.1 | 0.1 | 0.003 | 500 | 1800 | 300 | |
| 0.15 | 0.2 | 0.001 | 350 | 1400 | 200 |
| (rad) | (rad) | (rad) | |
|---|---|---|---|
| FOSM-ADRC | 0.00108 | 0.0205 | 0.0018 |
| FOSMC | 0.00141 | 0.02734 | 0.00615 |
| SMC | 0.00105 | 0.02747 | 0.0078 |
| 0.1 | 0.1 | 0.003 | |
| 0.1 | 0.1 | 0.003 | |
| 0.1 | 0.1 | 0.0015 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Zhang, H. Fractional-Order Sliding Mode with Active Disturbance Rejection Control for UAVs. Appl. Sci. 2025, 15, 556. https://doi.org/10.3390/app15020556
Zhang Z, Zhang H. Fractional-Order Sliding Mode with Active Disturbance Rejection Control for UAVs. Applied Sciences. 2025; 15(2):556. https://doi.org/10.3390/app15020556
Chicago/Turabian StyleZhang, Zhikun, and Hui Zhang. 2025. "Fractional-Order Sliding Mode with Active Disturbance Rejection Control for UAVs" Applied Sciences 15, no. 2: 556. https://doi.org/10.3390/app15020556
APA StyleZhang, Z., & Zhang, H. (2025). Fractional-Order Sliding Mode with Active Disturbance Rejection Control for UAVs. Applied Sciences, 15(2), 556. https://doi.org/10.3390/app15020556