
Prediction of Surface Deformation Induced by Ultra-Shallow-Buried Pilot Tunnel Construction


Abstract
1. Introduction
2. Calculation Theory of Lateral Ground Settlement Caused by Ultra-Shallow-Buried Pilot Tunnel Construction
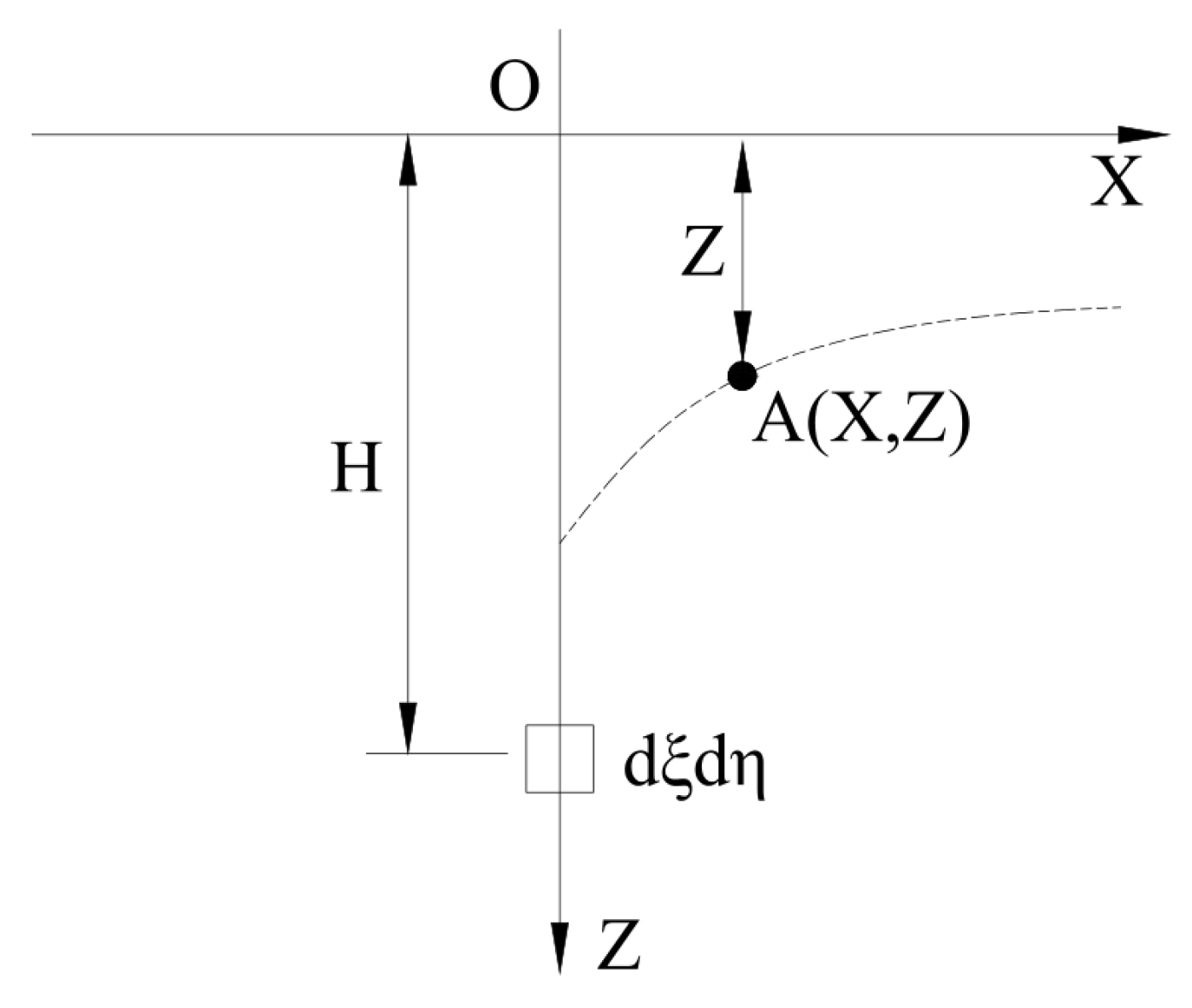
2.1. Calculation of Surface Deformation Induced by Unit Excavation
2.2. Calculation of Surface Deformation Considering Non-Uniform Convergence
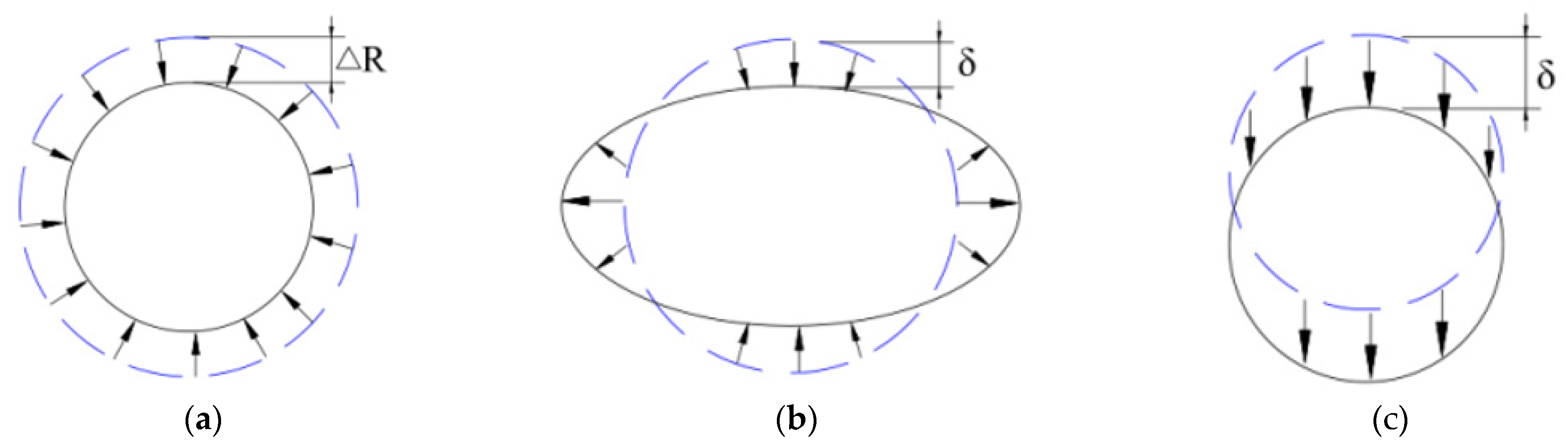
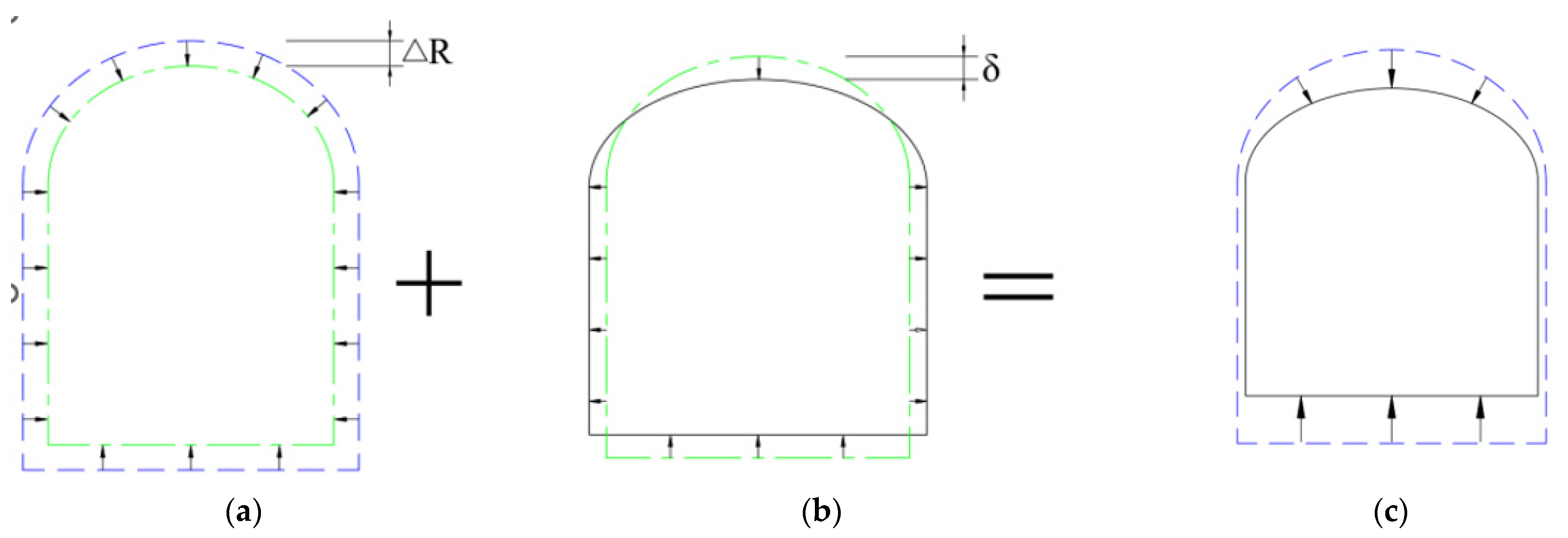
- After excavating the pilot tunnel and until the initial support gains strength, the excavation face is in a critical state and the surrounding stratum stress redistributes. At this time, the excavation face shrinks uniformly, as shown in Figure 4a.
- 2.
- Before the strength of the second lining is formed, the initial support deforms under the action of surrounding soil–water pressure. The second deformation occurs after uniform shrinkage, exhibiting a deformation trend of lateral expansion and vertical shrinkage, as shown in Figure 4b. Both deformation parameters (ΔR and δ) incorporate the influence of construction grouting on lining deformation.
- 3.
- The sectional area remains constant before and after the second deformation.
- 4.
- The construction-induced vertical ground displacement results from the superposition of the above two deformation components, as shown in Figure 4c.
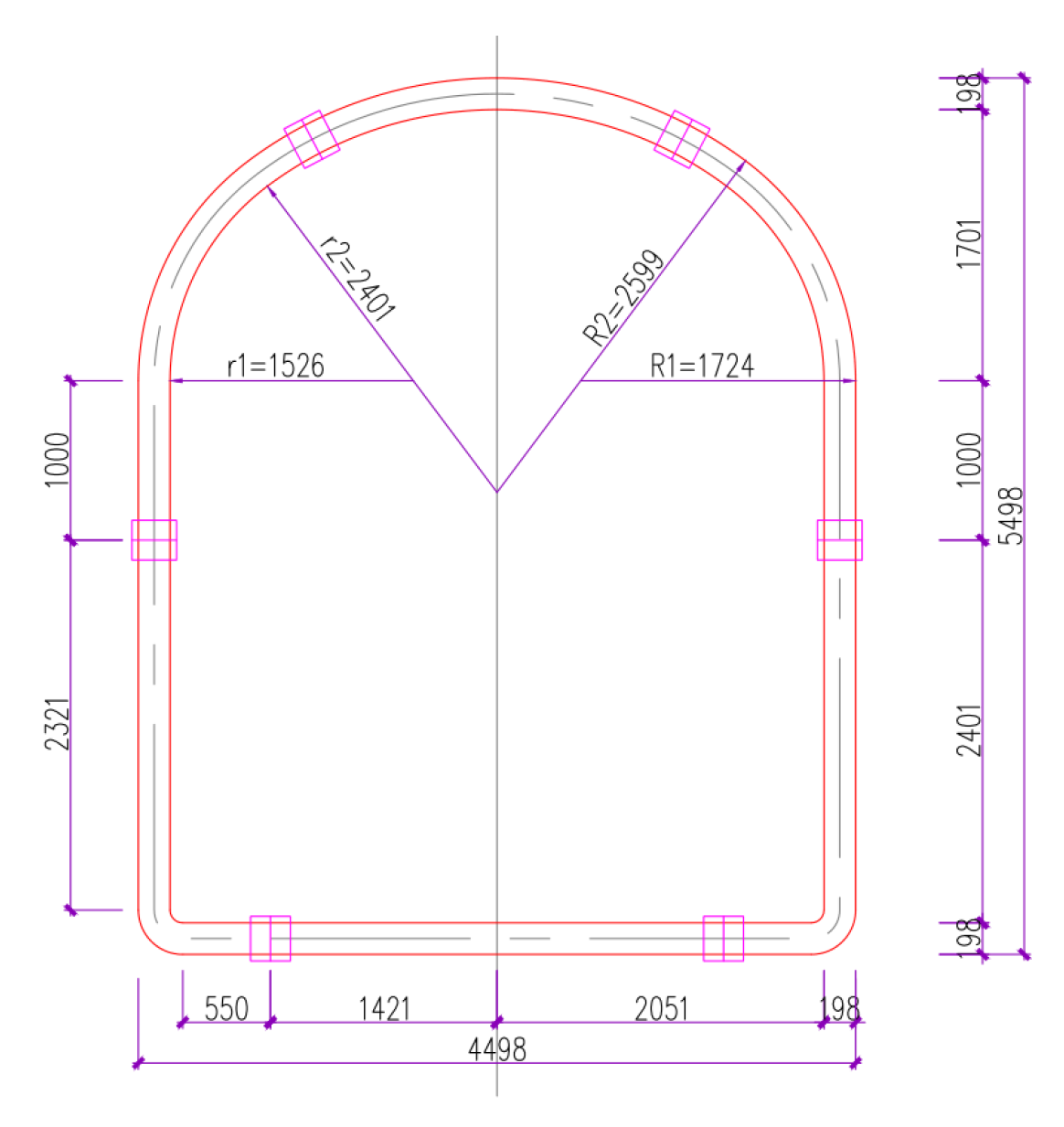
2.3. Key Parameters
3. Case Validation of Deformation Predictions in Shallow-Buried Tunnels
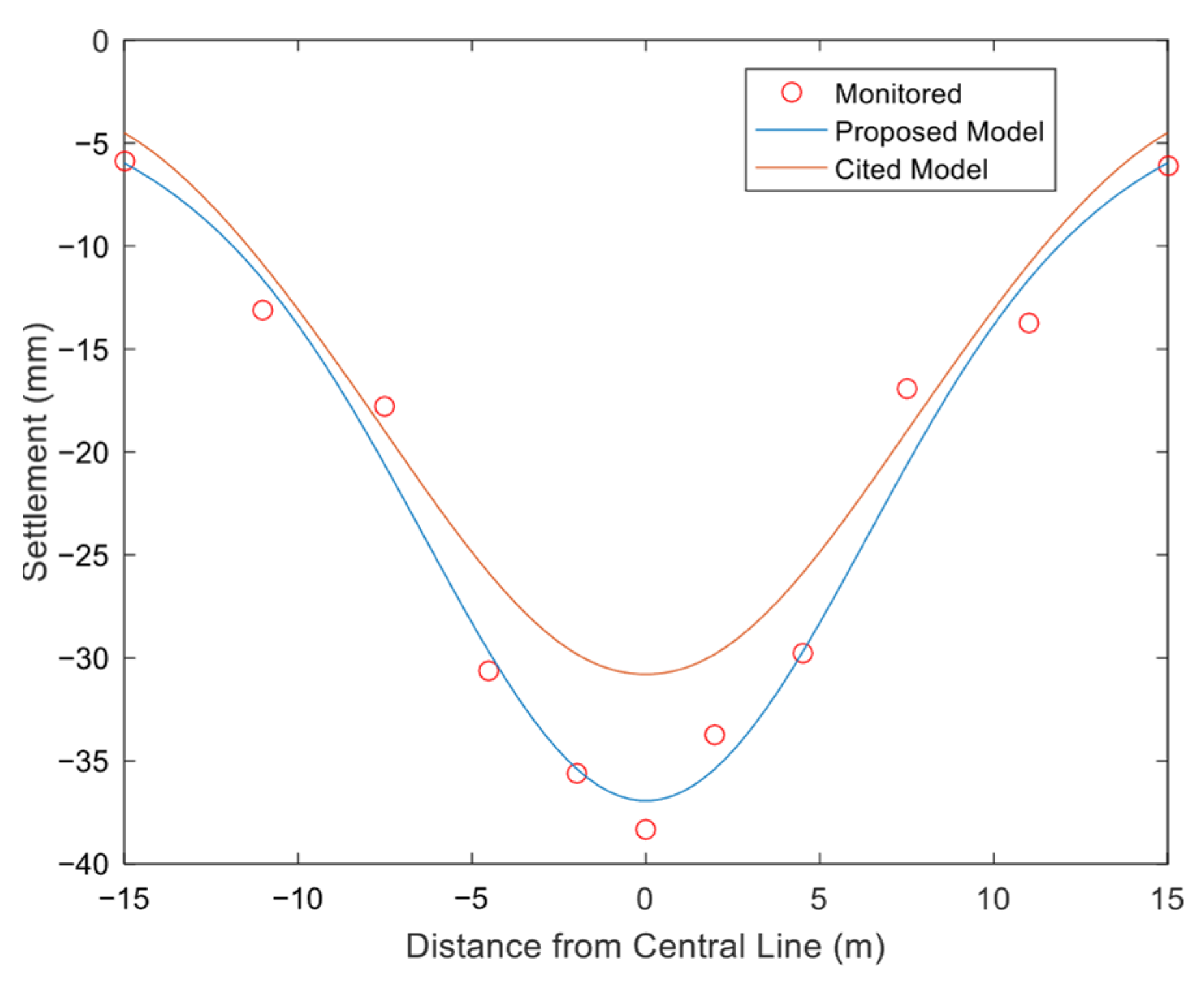
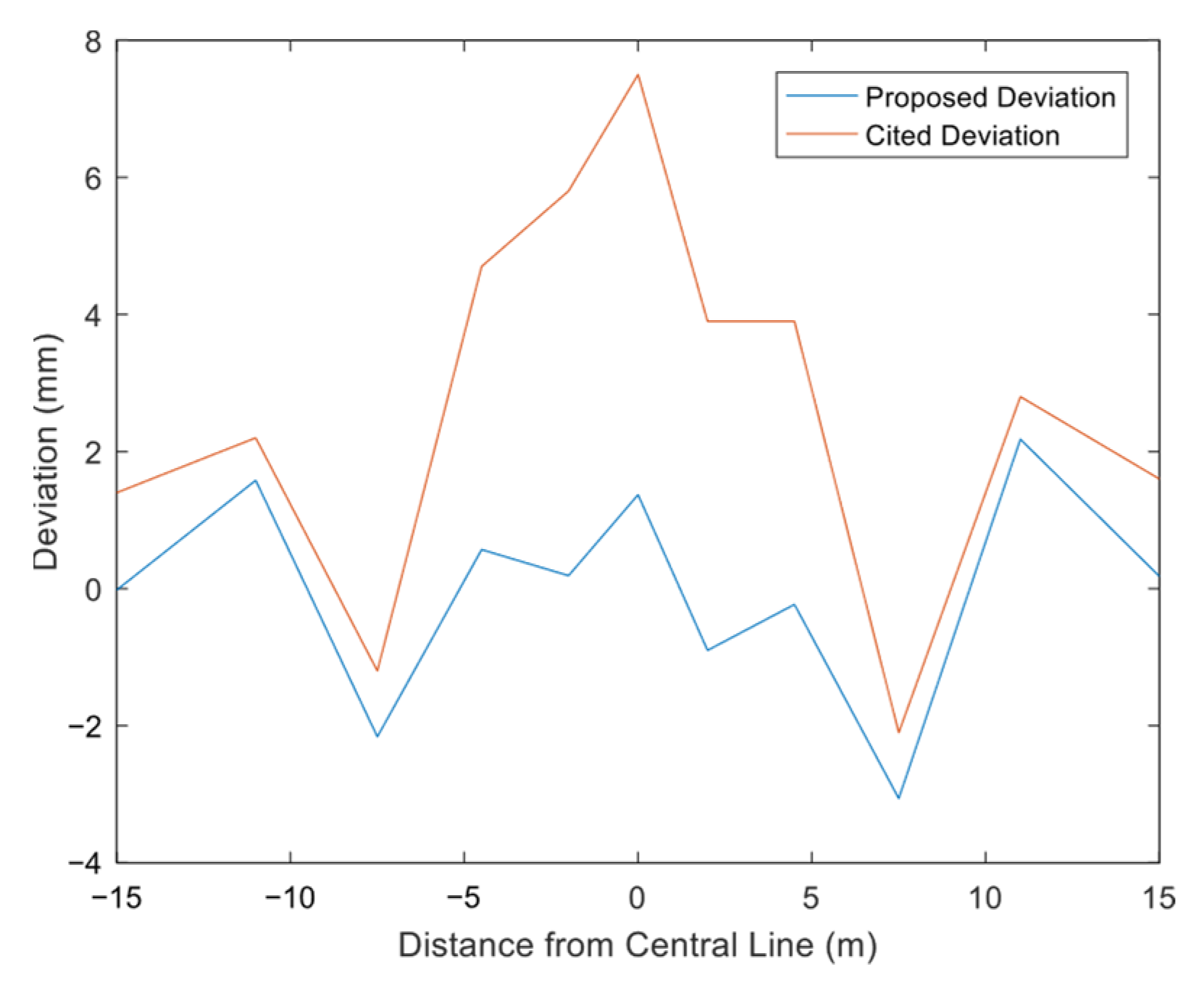
3.1. Kunming Rail Transit Phase I Interval Tunnel
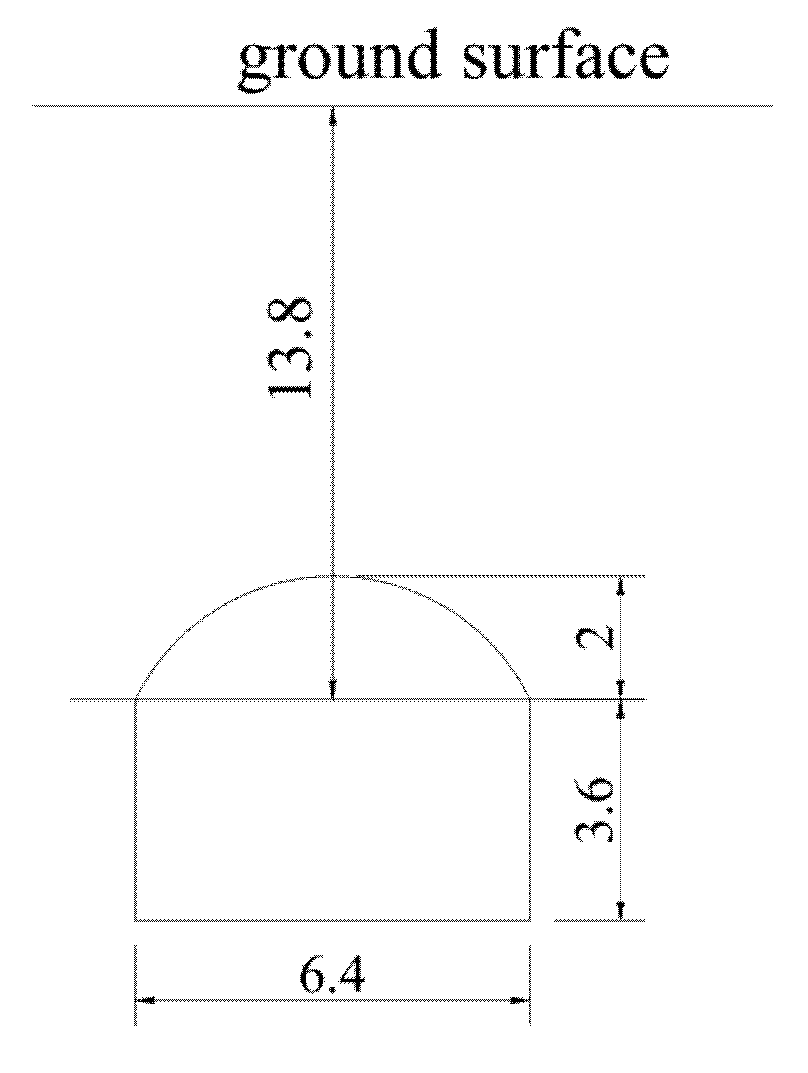
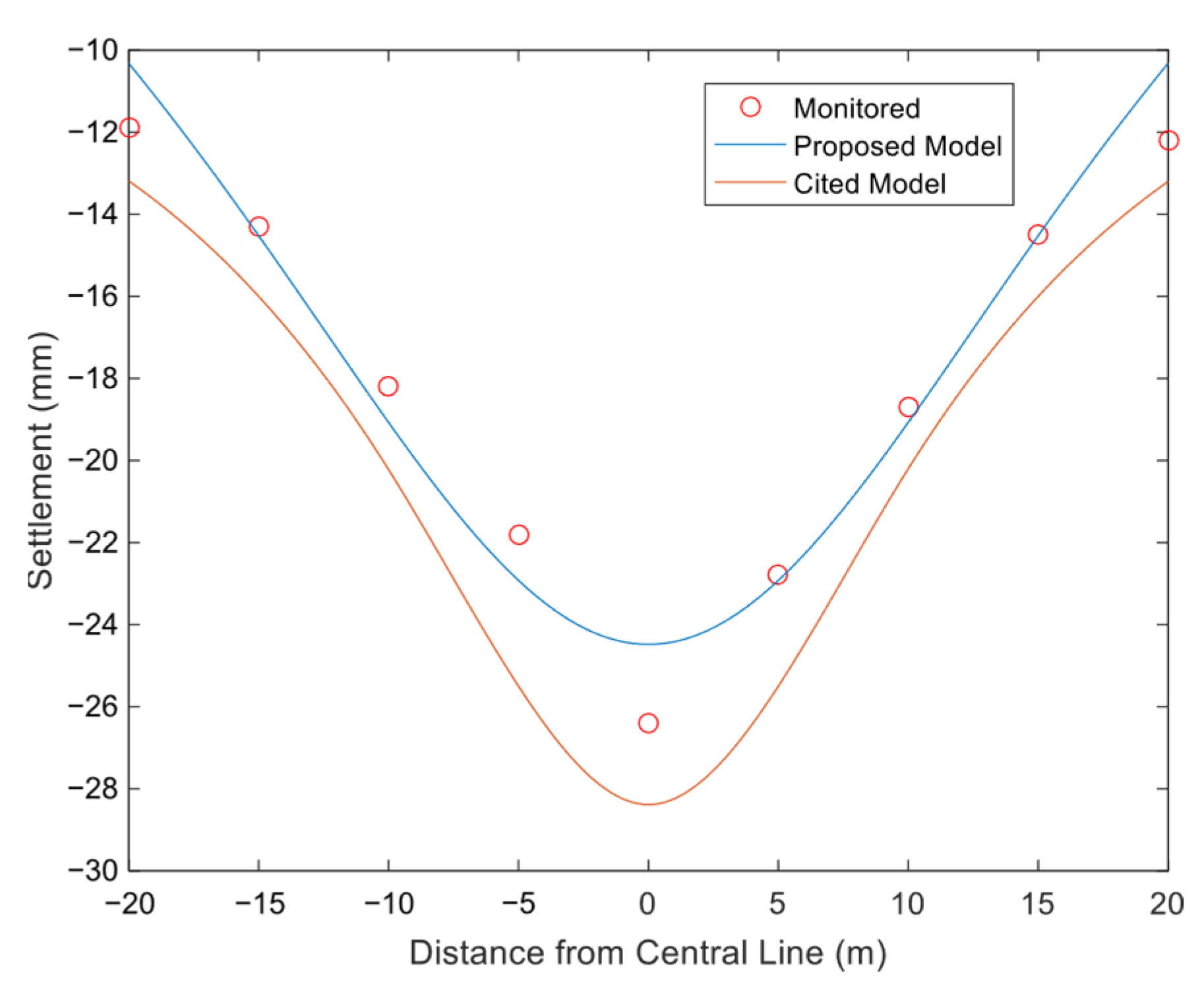
3.2. Xi’an Metro Line 8 Mining Method Tunnel
4. Analysis of Surface Deformation Induced by Ultra-Shallow-Buried Pilot Tunnel of Beijing Metro Line 13 Based on Non-Uniform Convergence Model
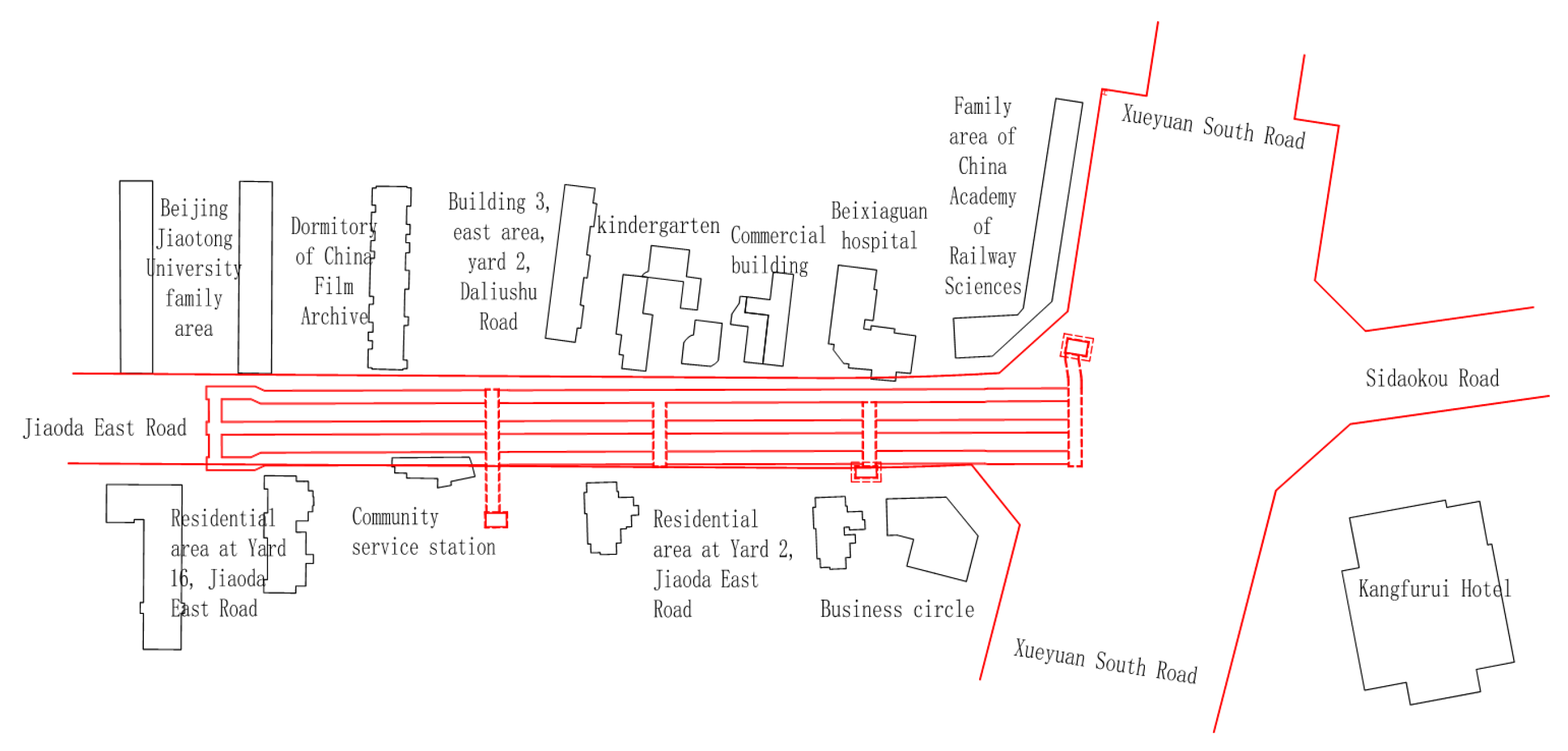
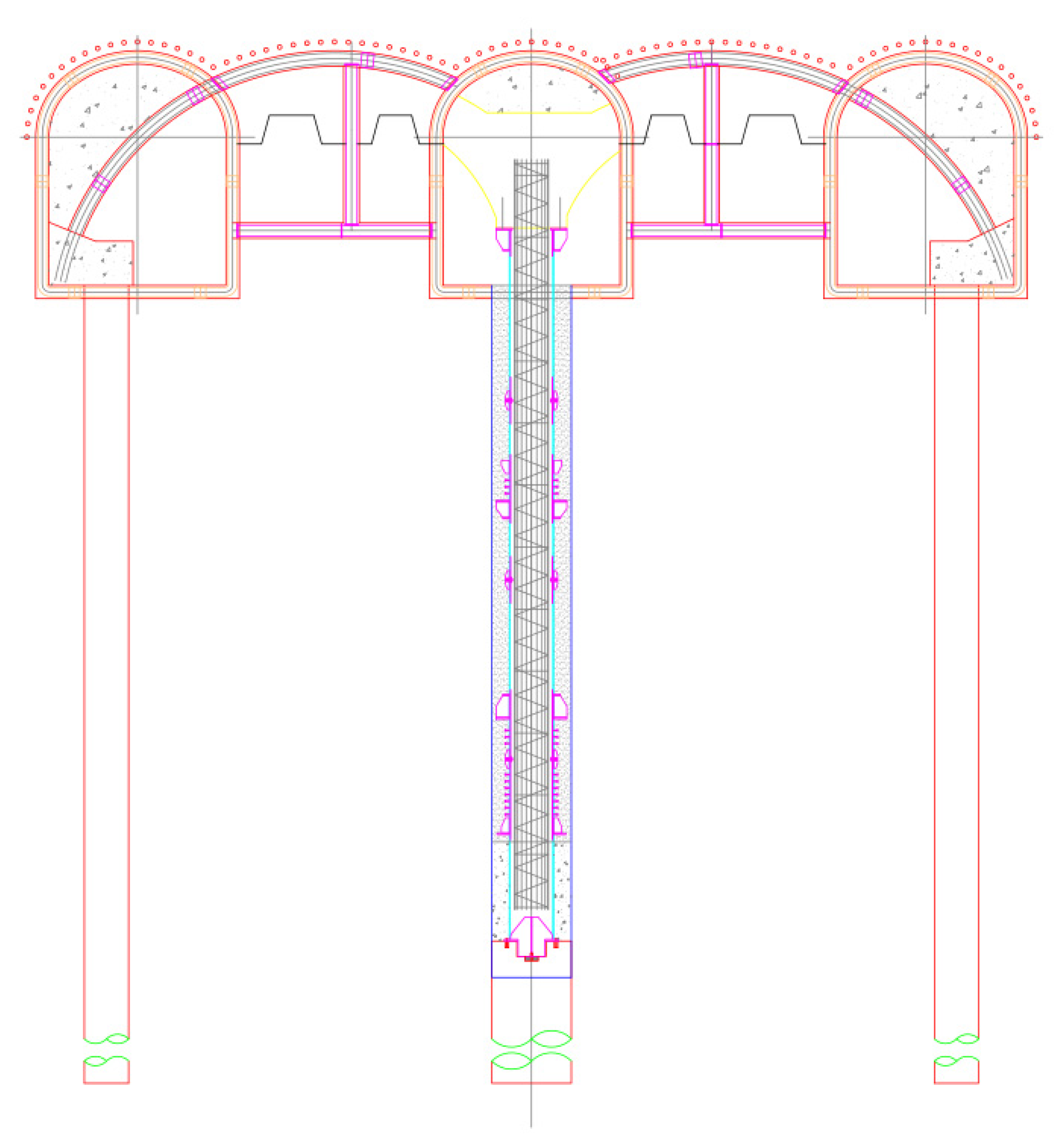
4.1. Project Overview
4.2. Analysis of Results
4.2.1. Vertical Surface Deformation
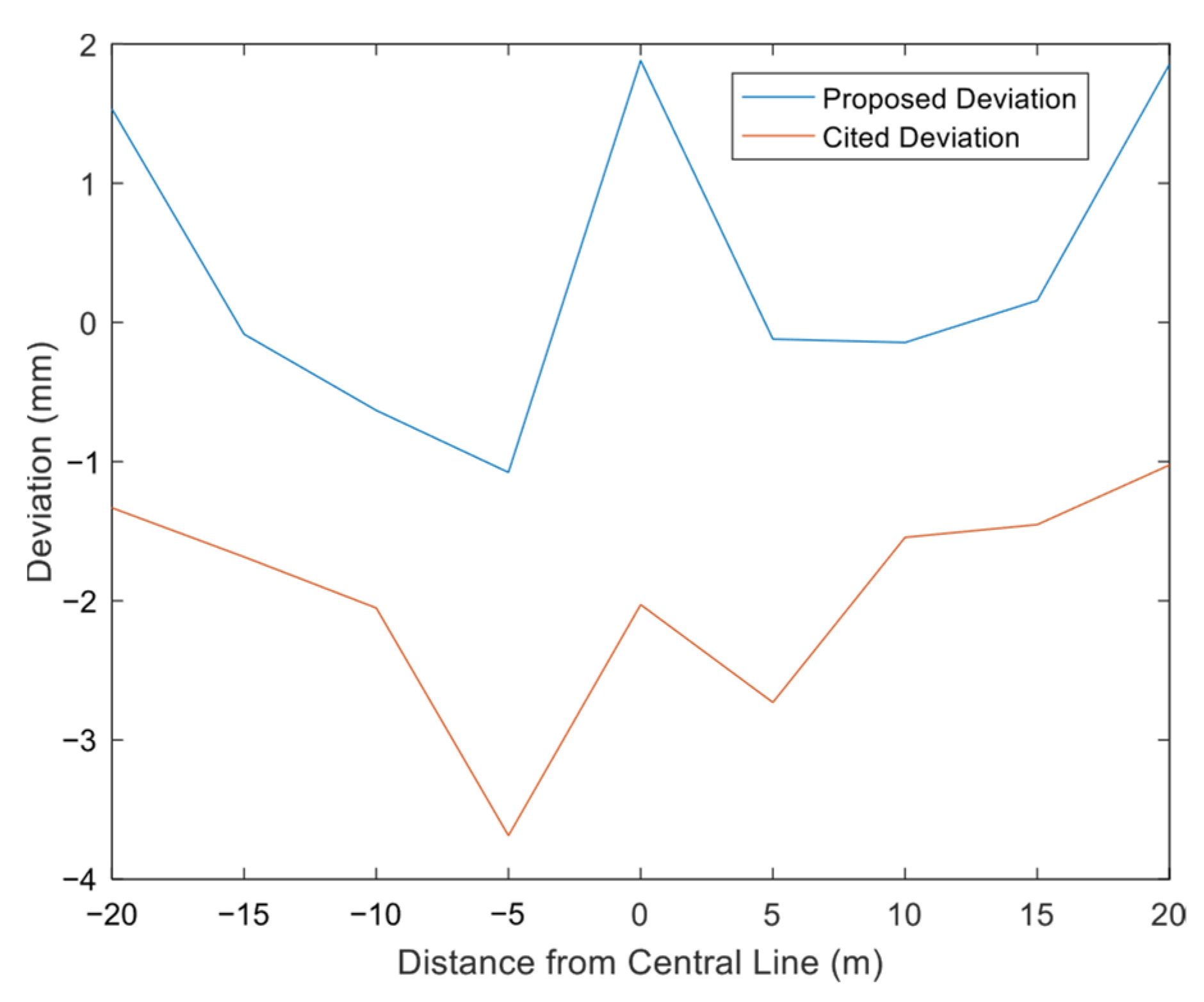
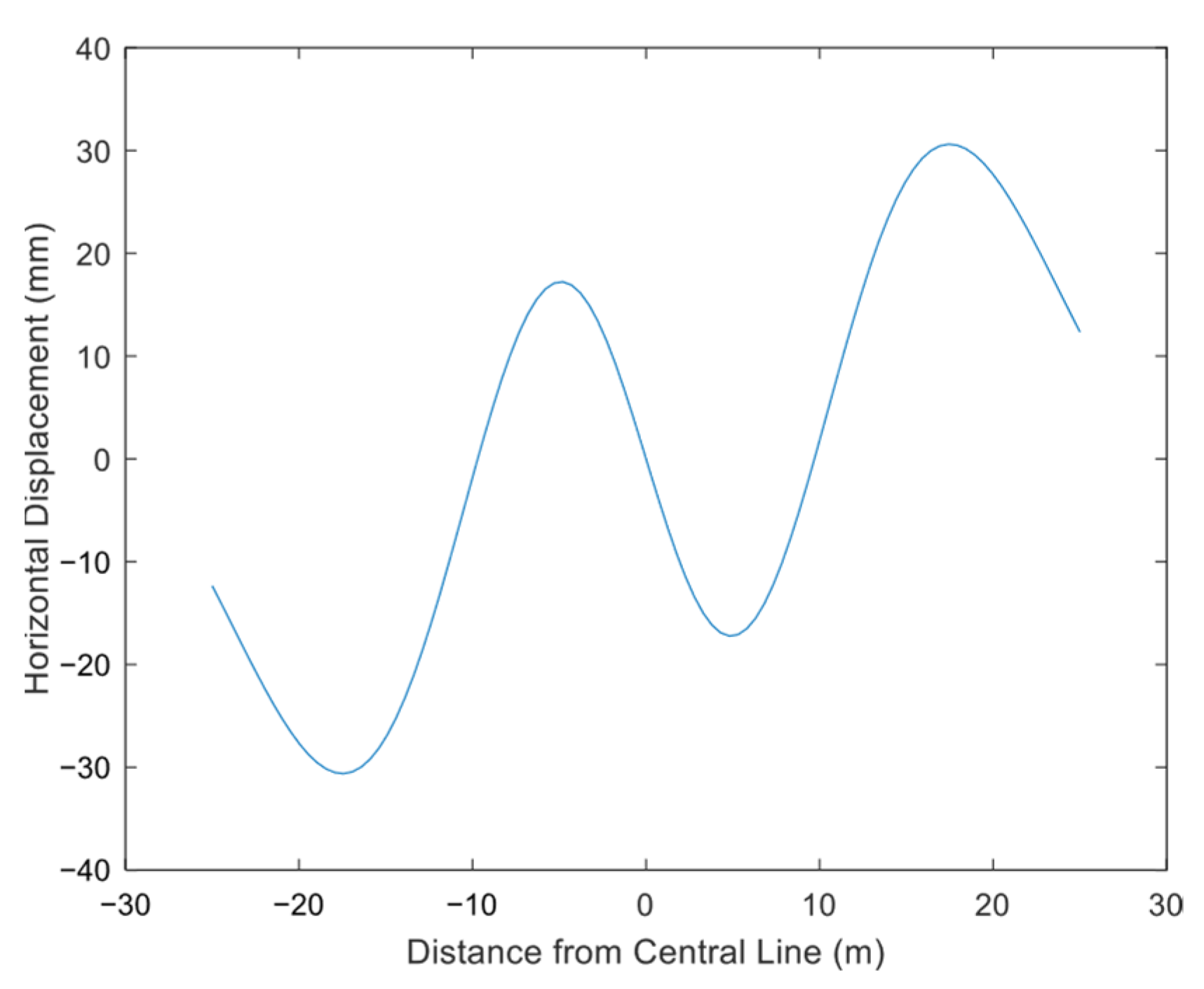
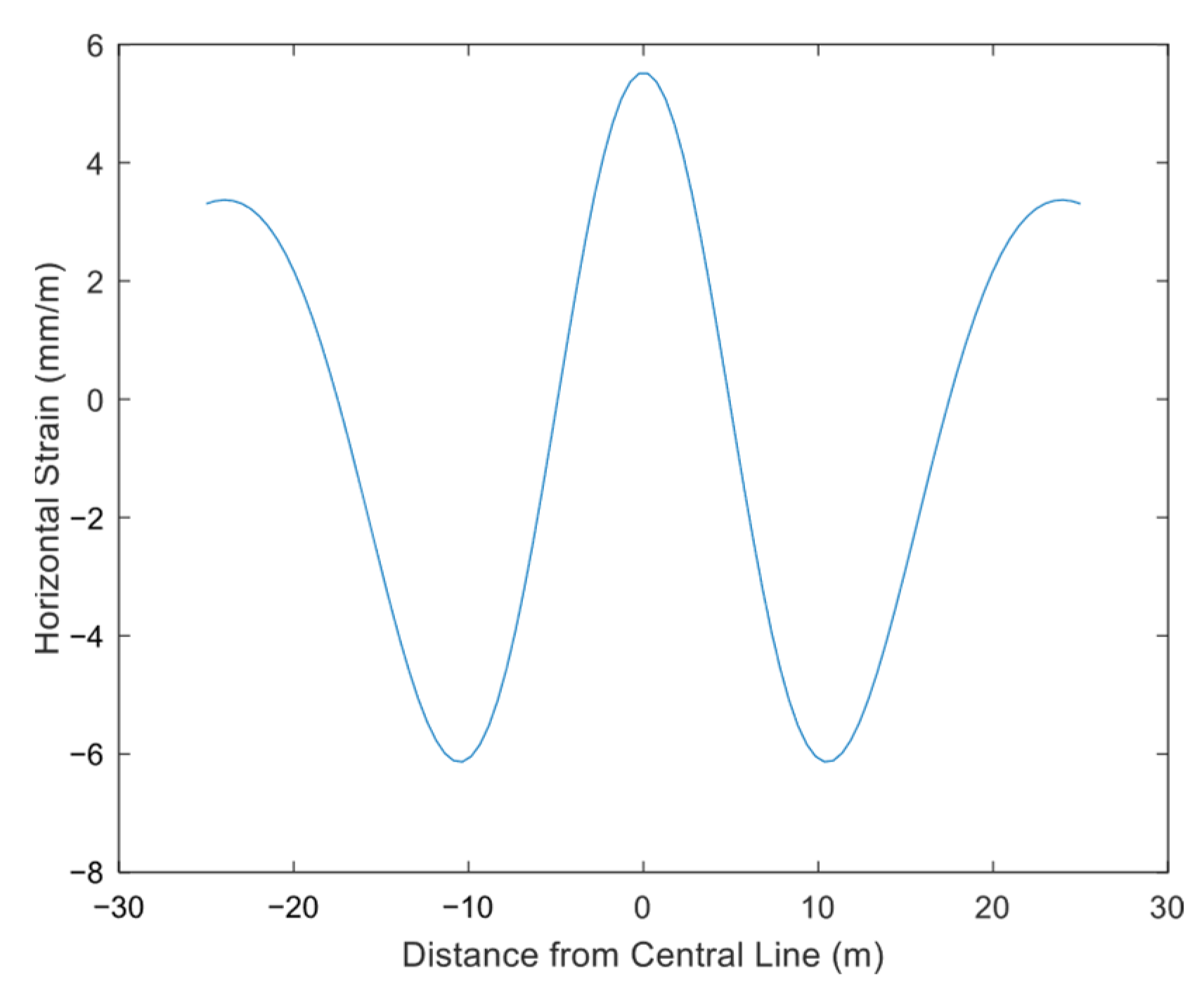
4.2.2. Horizontal Displacement of Ground Surface
5. Conclusions
- It is proposed that the ground surface settlement induced by ultra-shallow-buried excavation consists of two components: uniform soil shrinkage and the non-uniform deformation of the initial support. Based on this, the calculation formula for ground surface settlement caused by the excavation of a horseshoe-section pilot tunnel is derived.
- The calculation model proposed in this study applies to diverse geological conditions and construction methods, enabling the accurate prediction of surface settlement from shallow tunnel excavation. Taking the Kunming Railway Transit Phase I and Xi’an Metro Line 8 shallow tunnels as cases, compared with the equivalent cross-section calculation model, the direct use of the horseshoe-shaped cross-section model reduces errors by 50%, significantly enhancing prediction accuracy.
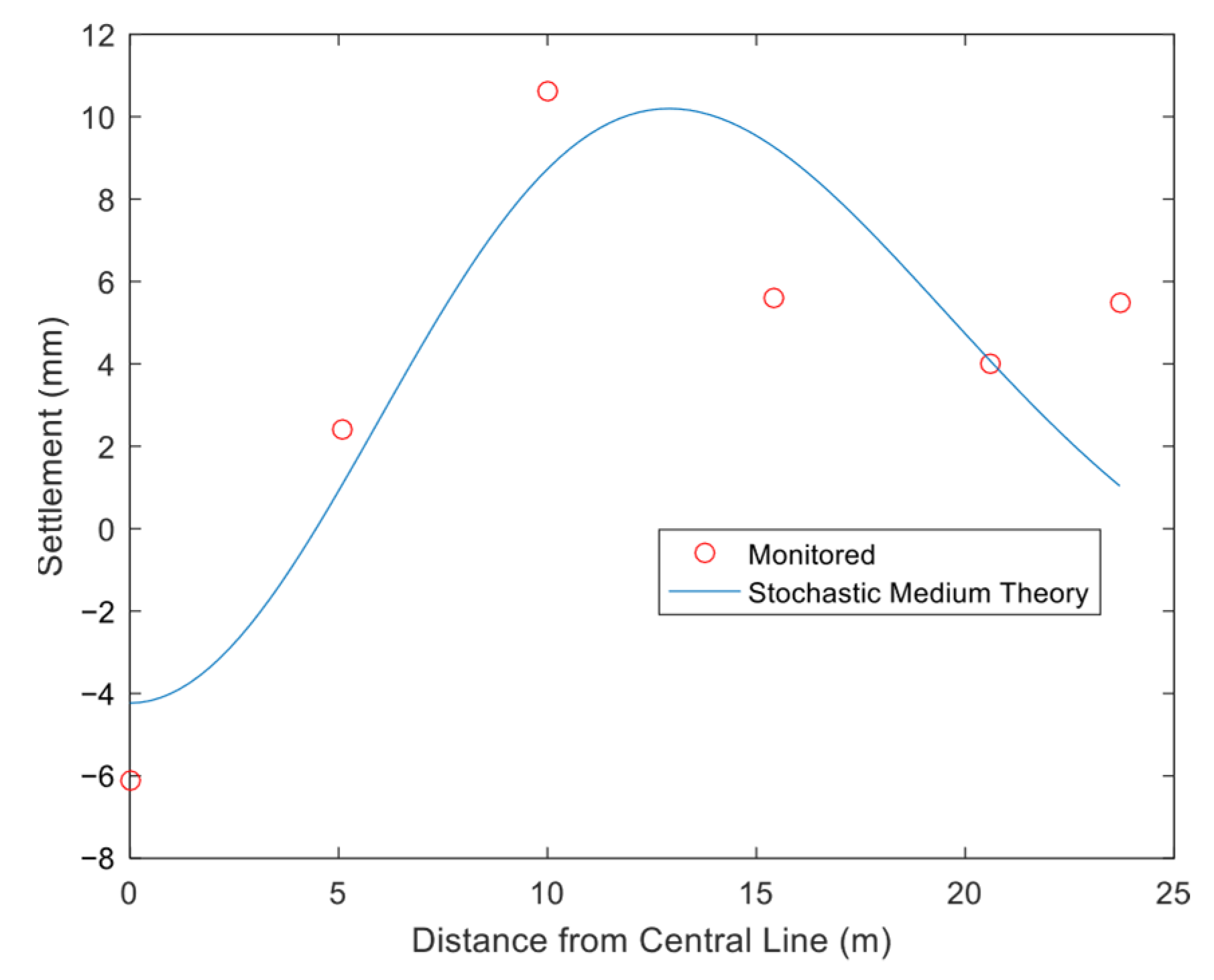
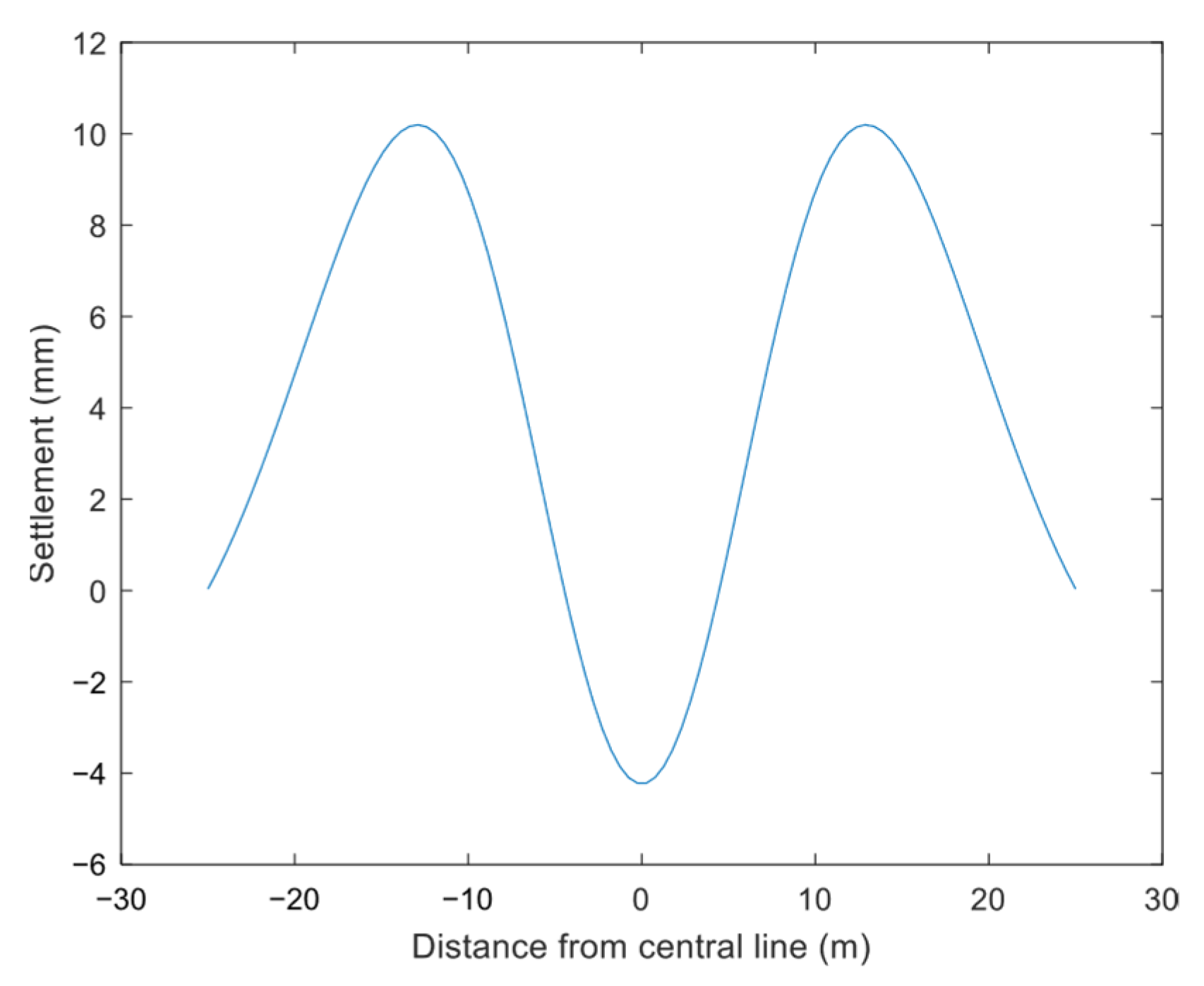
- The computational model proposed in this study for surface deformation induced by the excavation of an ultra-shallow-buried pilot tunnel on Beijing Rail Transit Line 13 demonstrates good correlation with the measured data. It is found that under ultra-shallow burial conditions, significant ground surface heave occurs at 2.5 times the width from the pilot tunnel center. The cross-section settlement curve overall trends show maximum settlement above the excavation center, followed by a rapid decrease in settlement toward the edge, which transitions to heave, after which the heave rapidly diminishes.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| PBA | Pile–Beam–Arch method | |
| List of Symbols | ||
| Symbol | Definition | Unit |
| X,Y,Z | coordinates of Cartesian coordinate system | m |
| ξ, ζ, η | coordinates of local Cartesian coordinate system | m |
| H | burial depth of micro soil element or tunnel section | m |
| dξdη | vertical section of micro soil element | - |
| dξdζdη | micro soil element | - |
| f | probability density function | - |
| P | probability | - |
| P(dS) | probability that excavation of micro soil element induces settlement at point A | - |
| q(Z),r(Z) | functions of coordinate Z | - |
| t | time elapsed after excavation | s |
| Ω | cross-sectional areas of tunnel before shrinkage | m2 |
| ω | cross-sectional areas of tunnel after shrinkage | m2 |
| W(X) | final surface settlement value at a point (X,0) on ground surface | m |
| β | main influence angle of surrounding rock | ° |
| x | horizontal distance from axis of pilot tunnel | m |
| a,b,c,d,e,f,g,h,e′,f′,g′,h′ | dual integration bounds | - |
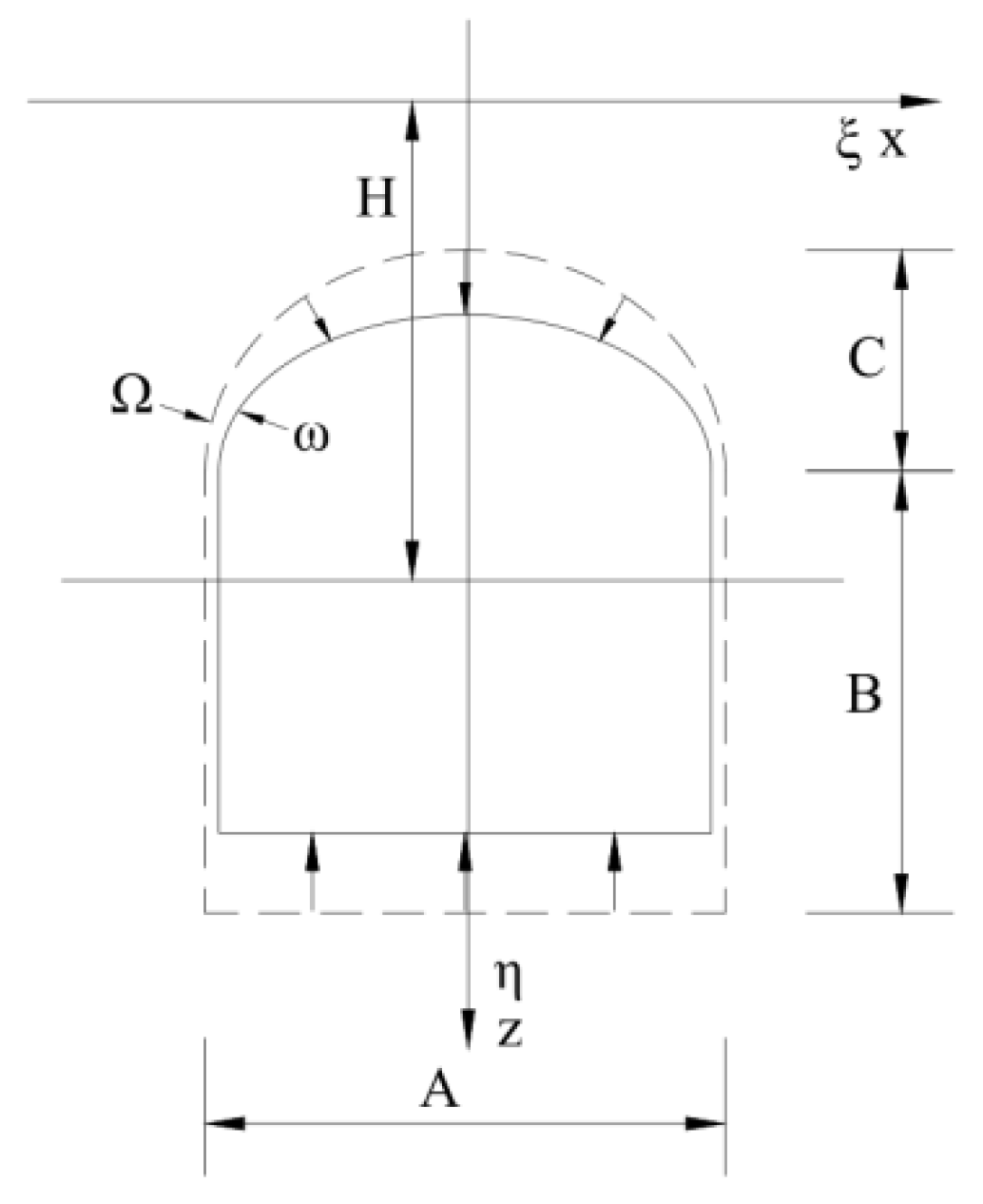
| A | width of rectangular portion in initial state of pilot tunnel section | m |
| B | height of rectangular portion in initial state of pilot tunnel section | m |
| C | height of arch portion in initial state of pilot tunnel section | m |
| R | radius of arch portion in initial state of pilot tunnel section | m |
| A′ | width of rectangular portion in pilot tunnel section after uniform shrinkage | m |
| B′ | height of rectangular portion in pilot tunnel section after uniform shrinkage | m |
| C′ | height of arch portion in pilot tunnel section after uniform shrinkage | m |
| Aoval | semi-major axis of arch portion in pilot tunnel section after second shrinkage | m |
| Boval | semi-minor axis of arch portion in pilot tunnel section after second shrinkage | m |
| ΔR | uniform shrinkage displacement of section | m |
| δ | second shrinkage displacement of section | m |
| F(p) | target function for parameters to be determined | - |
| p | parameter to be determined, where p = {tanβ,ΔR,δ} | - |
| residual between calculation and measured value | m | |
| average residual of each measuring point | m | |
| average value of calculated results | m | |
| S1 | mean square deviation of theoretical calculation | m2 |
| S2 | mean square deviation of residual of calculation | m2 |
| Cp | posterior variance ratio | - |
References
- Wang, J.; Gao, X.; Liu, H.; Dai, L.; Li, X.; Ren, Z.; Bai, B.; Fan, H. Characteristic analysis of tunnel collapse arch in weak rock mass. Phys. Fluids 2024, 36, 096606. [Google Scholar] [CrossRef]
- Wang, Q.; Wei, H.; Jiang, B.; Wang, X.; Sun, L.; He, M. High pre-tension reinforcing technology and design for ultra-shallow buried large-span urban tunnels. Int. J. Rock Mech. Min. 2024, 182, 105891. [Google Scholar] [CrossRef]
- Tao, Y.; Rao, J. Construction analysis of Guiyang Metro passing across Guiyang Railway Station in karst zone. Tunn. Undergr. Space Technol. 2022, 126, 104541. [Google Scholar] [CrossRef]
- Hui, W.; Shengjun, M.; Zimu, W.; Yuanfang, S. Study on ground settlement caused by excavation of metro parallel tunnels based on stochastic medium theory. Yangtze River 2019, 50, 182–187. [Google Scholar]
- Zhao, D.; Bai, J.; Chen, X.; Li, H.; He, Y.; Zhang, Q.; Liu, R. Shallow-buried subway station construction period: Comparison of intelligent early warning and optimization strategies for surface deformation risk. Tunn. Undergr. Space Technol. 2024, 153, 105978. [Google Scholar] [CrossRef]
- Shi, S.; Zhao, R.; Li, S.; Xie, X.; Li, L.; Zhou, Z.; Liu, H. Intelligent prediction of surrounding rock deformation of shallow buried highway tunnel and its engineering application. Tunn. Undergr. Space Technol. 2019, 90, 1–11. [Google Scholar] [CrossRef]
- Gang, W.; Xin-Jiang, W.; Ci, G.; Zhi, D. Study on calculation for shield tunneling-induced ground movements in clays. Rock Soil Mech. 2006, 27, 995–999. [Google Scholar]
- Cheng, X.; Guo, Y.; Zhu, X.; Li, W.; Hu, W.; Xu, L.; Xie, L. Analytical study on additional stress field of double shield TBM tunneling based on Mindlin theory. Appl. Math. Model. 2025, 142, 115980. [Google Scholar] [CrossRef]
- Lv, Z.; Yan, M.; Yuan, S.; Xia, C.; Zeng, X. Complex function stress solution of cold region tunnels under frictional contact condition of lining and surrounding rock with support delay. Appl. Math. Model. 2025, 138, 115817. [Google Scholar] [CrossRef]
- Jain, H.; Kumar, J. Ground displacements and stresses around a non-uniformly deforming circular tunnel in elastic media using complex variable method. Acta Geotech. 2023, 18, 2169–2193. [Google Scholar] [CrossRef]
- Jain, H.; Kumar, J. Displacements and stresses around a circular tunnel in an elastic medium with pseudo-static horizontal earthquake body forces. Comput. Geotech. 2023, 162, 105663. [Google Scholar] [CrossRef]
- Kong, F.; Lu, D.; Ma, C.; Shen, C.; Yang, X.; Du, X. Fractional viscoelastic solution of stratum displacement of a shallow tunnel under the surface slope condition. Undergr. Space 2023, 10, 233–247. [Google Scholar] [CrossRef]
- Fanwen, S.; Dingli, Z.; Huangcheng, F.; Acikgoz, S. Analytical solution of ground displacement responses induced by shallowly tunneling in stratum with a cavity. J. Cent. South Univ. (Sci. Technol.) 2023, 54, 1109–1120. [Google Scholar]
- Wang, F.; Du, X.; Li, P. Prediction of subsurface settlement induced by shield tunnelling in sandy cobble stratum. J. Rock Mech. Geotech. Eng. 2024, 16, 192–212. [Google Scholar] [CrossRef]
- Litwiniszyn, J. The theories and model research of movements of ground masses. In Proceedings of the European Congress Ground Movement; University of Leeds: Leeds, UK, 1957; pp. 203–209. [Google Scholar]
- Junsheng, Y.; Baochen, L. Ground Surface Movement and Deformation Due to Tunnel Construction by Squeezing Shield. Rock Soil Mech. 1998, 19, 10–13. [Google Scholar]
- Yang, J.S.; Liu, B.C.; Wang, M.C. Modeling of tunneling-induced ground surface movements using stochastic medium theory. Tunn. Undergr. Space Technol. 2004, 19, 113–123. [Google Scholar] [CrossRef]
- Yu, L.; Zhang, D.; Fang, Q.; Xu, T.; Luo, J.; Chen, W. Semi-analytical solutions of three-dimensional ground movements due to shallow tunnelling. Tunn. Undergr. Space Technol. 2023, 136, 105074. [Google Scholar] [CrossRef]
- Loganathan, N.; Poulos, H.G. Analytical prediction for tunneling induced ground movementsin clays. J. Geotech. Geoenviron. 1998, 124, 846–856. [Google Scholar] [CrossRef]
- Ma, M.; Yang, X.; Zhou, J.; Li, L.; Tian, J. Model tests and numerical simulations of deformation repair effect for operating shield tunnels under horizontal lateral grouting. Transp. Geotech. 2024, 47, 101277. [Google Scholar] [CrossRef]
- Xuan, H.; Ning, L.I. A predicting model for ground movement induced by non-uniform convergence of tunnel. Chin. J. Geotech. Eng. 2007, 29, 347–352. [Google Scholar]
- Gang, W.; Xinjiang, W.; Weijun, C.; Ning, Y. Prediction of Surface Settlement Induced by Shallow Excavation Tunneling. J. Munic. Technol. 2009, 27, 487–490. [Google Scholar]
- Zhu-Shan, S.; Xin, Z. Based on extension of stochastic medium theory prediction model for surface subsidence induced by tunnel construction. J. Chang. Univ. (Nat. Sci. Ed.) 2021, 41, 73–81. [Google Scholar]
- Shang, X.; Miao, S.; Wang, H.; Yang, P.; Xia, D. A prediction model for surface settlement during the construction of variable cross-section tunnels under existing structures based on stochastic medium theory. Tunn. Undergr. Space Technol. 2025, 155, 106177. [Google Scholar] [CrossRef]
- Wang, F.; Du, X.; Li, P. Predictions of ground surface settlement for shield tunnels in sandy cobble stratum based on stochastic medium theory and empirical formulas. Undergr. Space 2023, 11, 189–203. [Google Scholar] [CrossRef]
- Zhang, D.; Chen, C.; Zhang, D. Ground surface movement of Shallow-Buried Large-Sectional tunnel under Full-Ring Pipe-Jacking roof and ground freezing. Tunn. Undergr. Space Technol. 2022, 127, 104600. [Google Scholar] [CrossRef]
- Junsheng, Y.; Baochen, L. The prediction of ground surface settlements due to tunnelling in urban areas. Prog. Saf. Sci. Technol. 2000, II, 354–361. [Google Scholar]
- Baochen, L.; Jiasheng, Z. Stochastic method for ground subsidence due to near surface excavation. Chin. J. Rock Mech. Eng. 1995, 14, 289–296. [Google Scholar]
- Verruijt, A.; Booker, J.R. Surface settlements due to deformation of a tunnel in an elastic half plane. Geotechnique 1996, 46, 753–756. [Google Scholar] [CrossRef]
- Gonzalez, C.; Sagaseta, C. Patterns of soil deformations around tunnels: Application to the extension of madrid metro. Comput. Geotech. 2001, 28, 445–468. [Google Scholar] [CrossRef]
- Ziwen, H. Analysis of Surface Subsidence and Tunnel Stability During the Shallow Tunnelling Construction. Master’s Thesis, East China University of Technology, Fuzhou, China, 2017. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Integration Bound | Arch Part | Rectangular Part |
|---|---|---|
| a | ||
| b | ||
| c | ||
| d | -c | -c |
| e | ||
| f | ||
| g | ||
| h | -g | -g |
| R |
| Integration Bound | Arch Part | Rectangular Part |
|---|---|---|
| e′ | ||
| f′ | ||
| g′ | ||
| h′ | −g′ | −g′ |
| Grade | Excellent | Qualified | Marginal | Unqualified |
|---|---|---|---|---|
| Cp | <0.35 | <0.5 | <0.65 | ≥0.65 |
| Stratum | Elastic Modulus (MPa) | Cohesion (kPa) | Internal Friction Angle (°) | Poisson’s Ratio |
|---|---|---|---|---|
| Silty Clay | 7.24 | 12.8 | 15.6 | 0.28 |
| Argillaceous Siltstone | 8.55 | 14.6 | 18.7 | 0.3 |
| Stratum | Elastic Modulus (MPa) | Cohesion (kPa) | Internal Friction Angle (°) | Poisson’s Ratio |
|---|---|---|---|---|
| Medium Sand Layer | 33 | 2 | 33 | 0.29 |
| Stratum | Cohesion (kPa) | Internal Friction Angle (°) | Coefficient of Earth Pressure at Rest | Vertical Subgrade Coefficient Kv (MPa/m) | Horizontal Subgrade Coefficient Kh (MPa/m) | Characteristic Value of Foundation Bearing Capacity (kPa) |
|---|---|---|---|---|---|---|
| Silty Clay③ | 31.6 | 11.8 | 0.6 | 30 | 34.3 | 130 |
| Clayey Silt③1 | 14.1 | 25.4 | 0.43 | 45 | 52.4 | 140 |
| Silty Fine Sand③2 | 0 | 30 | 0.40 | 25 | 22 | 200 |
| Medium Coarse Sand③3 | 0 | 32 | 0.35 | 35 | 30 | 300 |
| Pebble Gravel③4 | 0 | 35 | 0.30 | 65 | 60 | 400 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Li, X.; Yang, Y.; Gao, X.; Shen, Y.; Jing, P. Prediction of Surface Deformation Induced by Ultra-Shallow-Buried Pilot Tunnel Construction. Appl. Sci. 2025, 15, 7546. https://doi.org/10.3390/app15137546
Liu C, Li X, Yang Y, Gao X, Shen Y, Jing P. Prediction of Surface Deformation Induced by Ultra-Shallow-Buried Pilot Tunnel Construction. Applied Sciences. 2025; 15(13):7546. https://doi.org/10.3390/app15137546
Chicago/Turabian StyleLiu, Caijun, Xiangdong Li, Yang Yang, Xing Gao, Yupeng Shen, and Peng Jing. 2025. "Prediction of Surface Deformation Induced by Ultra-Shallow-Buried Pilot Tunnel Construction" Applied Sciences 15, no. 13: 7546. https://doi.org/10.3390/app15137546
APA StyleLiu, C., Li, X., Yang, Y., Gao, X., Shen, Y., & Jing, P. (2025). Prediction of Surface Deformation Induced by Ultra-Shallow-Buried Pilot Tunnel Construction. Applied Sciences, 15(13), 7546. https://doi.org/10.3390/app15137546