
Scale-Model Experiment on the Delayed Failure Mechanism of Deep Tunnels in Brittle Rock


Abstract
1. Introduction
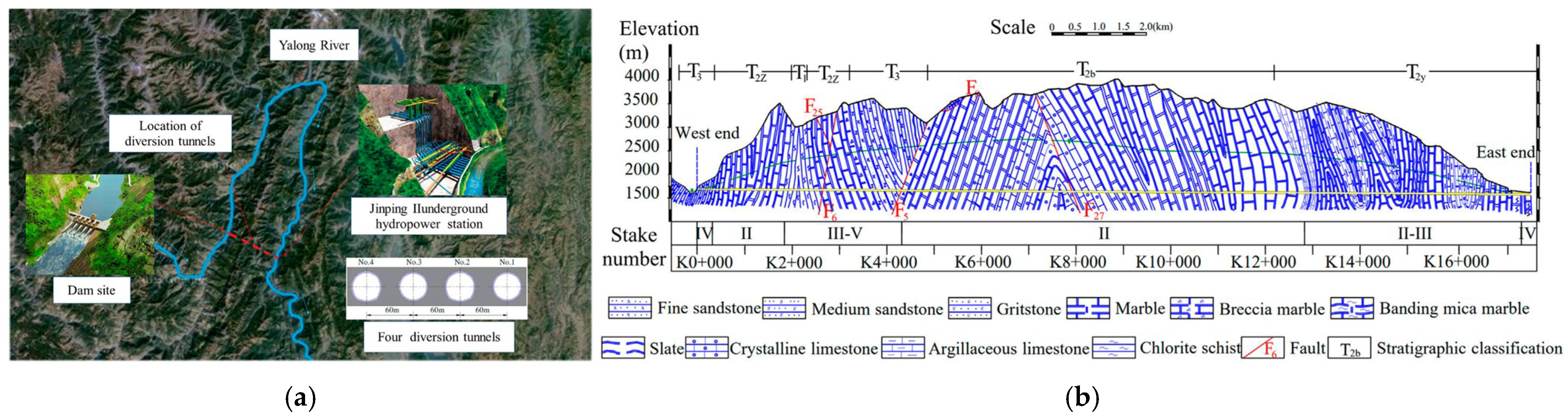
2. Background Engineering and Scientific Issue
- (1)
- Most of the time-delayed rockbursts occur within 7 days to 1 month after excavation;
- (2)
- The relationship between frequency of the time-delayed rockbursts and their delayed blasting time matches a power function, and the peak frequency of rockburst count is within 4 h after excavation.
3. Research Methodology
- (1)
- Conducted scale-model tests to determine the delayed failure model and time under different loading scheme.
- Deep Rock Scale-model Testing Apparatus (DRSTA) preparation.
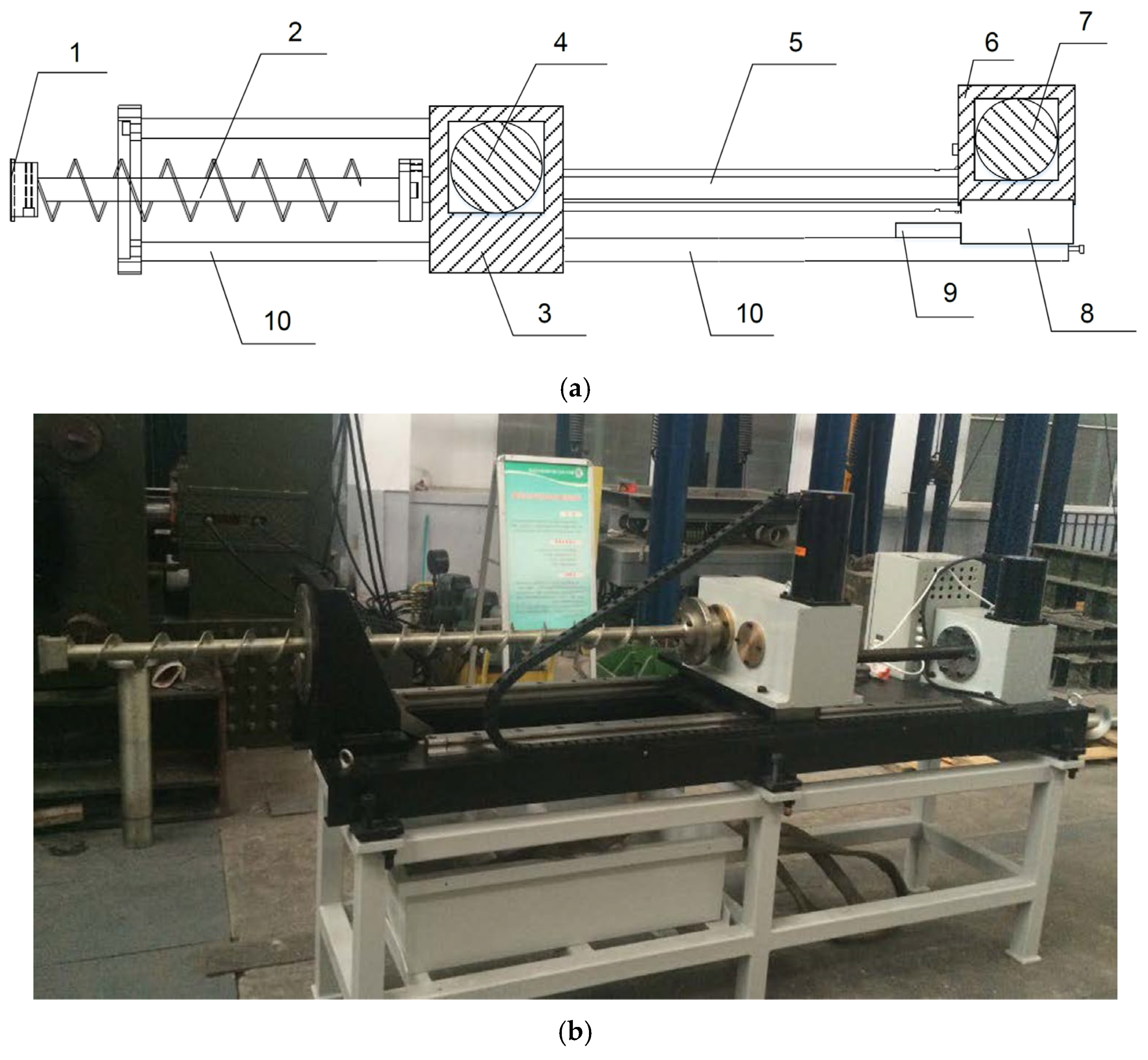
- Drilling machine design and manufacture.
- Scale factor determined based on the chamber size of DRSTA and tunnel diameter of the scaled model.
- Similar material studied to simulate the brittle rock in Jinping site.
- Monitoring system designed to obtain detailed data of the tunnel delayed rock burst.
- (2)
- Conducted the delayed failure time simulation of the scale-model testing.
- Established a finite element model of the tunnel scaled model.
- Initial geostress, material properties, boundary condition, etc., applied to the FEM model.
- Numerical simulations under different loading scheme were conducted with Abaqus(V6.14) software.
- (3)
- Analyzed the results the scale-model tests and numerical simulations. Compared the time-to-failure of the scale-model tests and numerical simulations. Obtained the delayed failure mechanism based on the time-to-failure, rock properties, and geostress.
4. Scale-Model Testing of Deep Tunnel
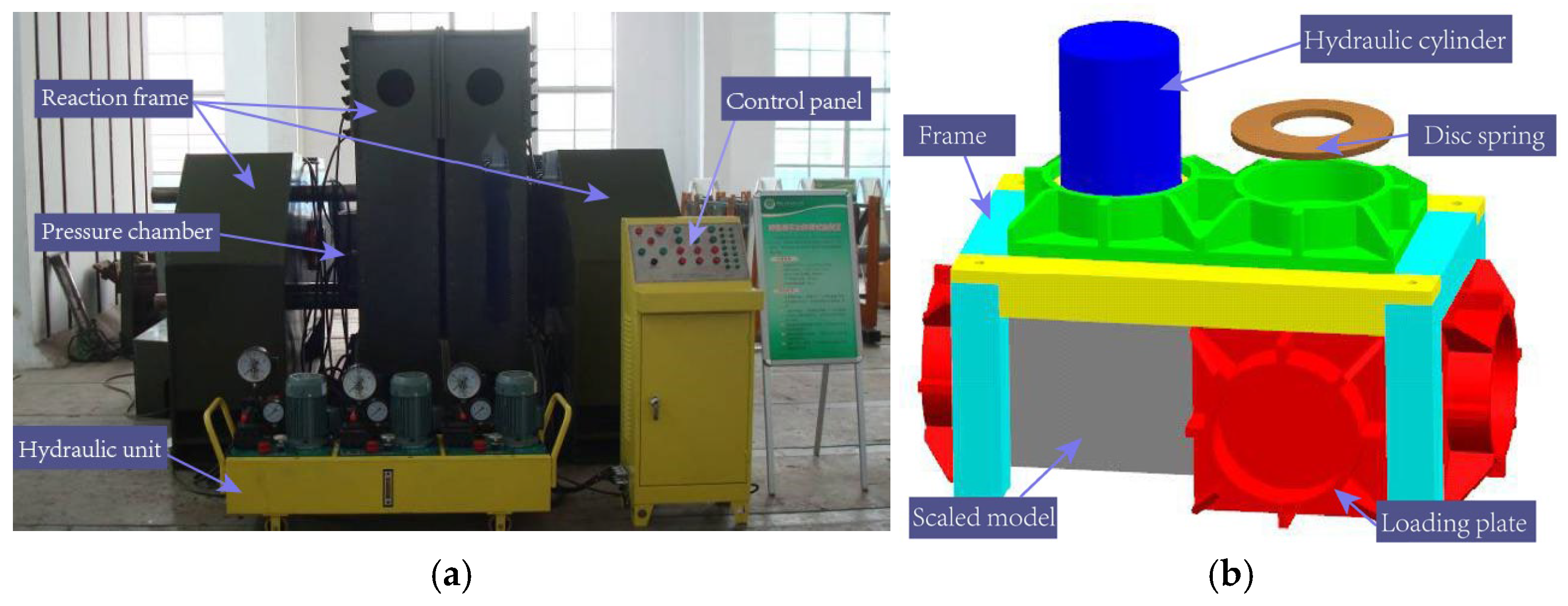
4.1. Deep Rock Scale-Model Testing Apparatus
- (1)
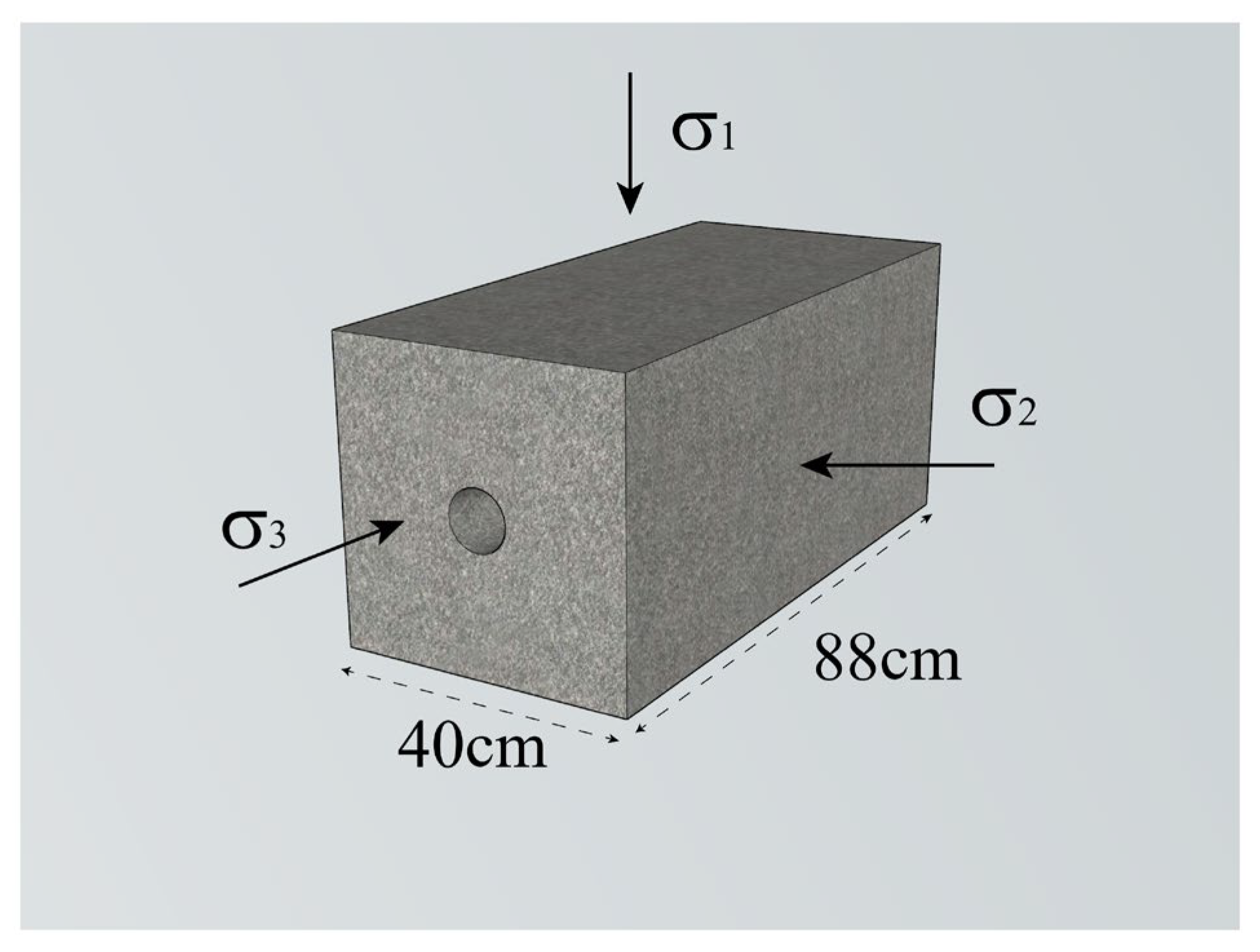
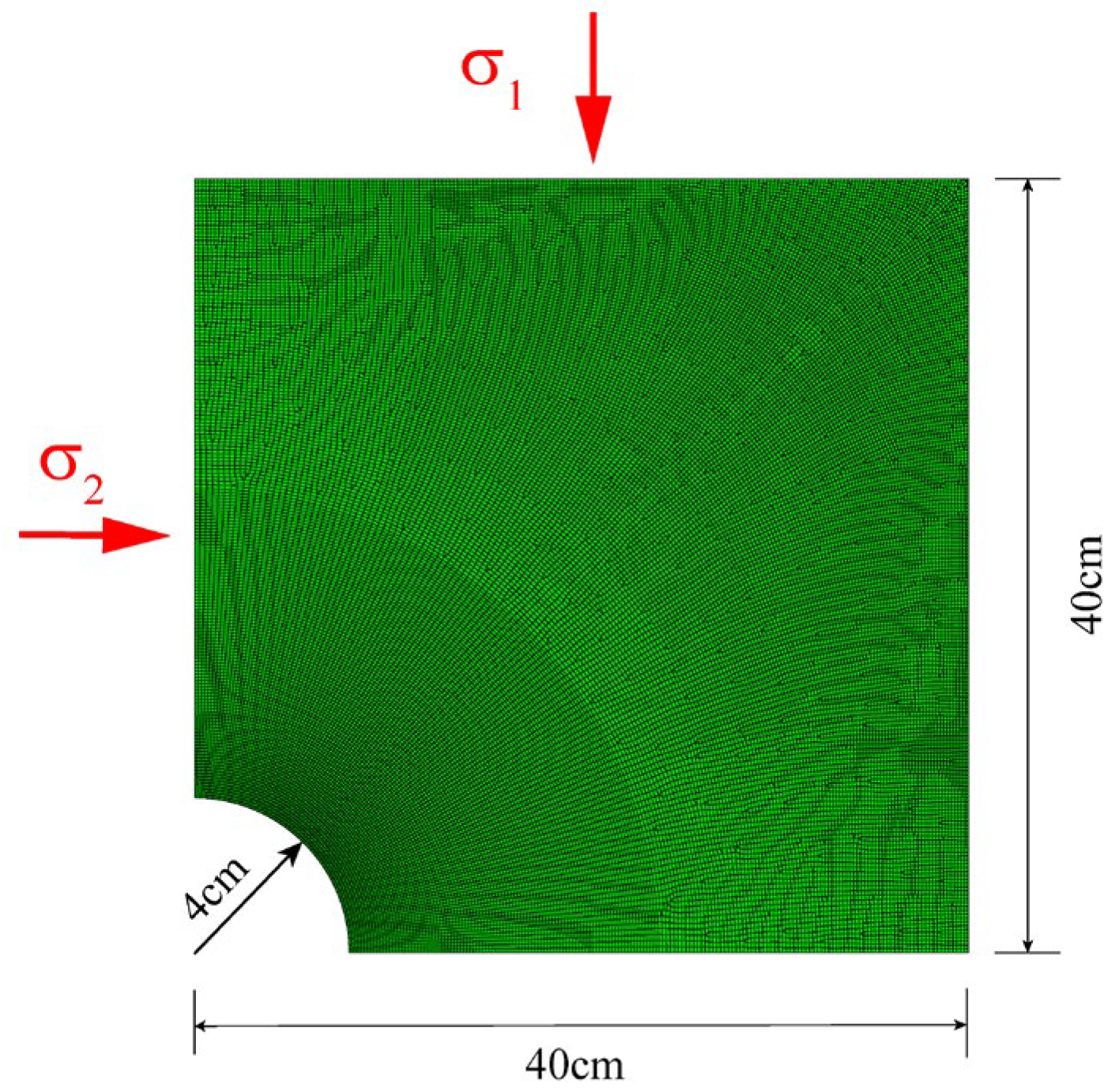
- To obtain the high initial triaxial stress status of the model, we limited the size of the model chamber to 40 cm × 40 cm × 88 cm (lateral × horizontal × axial right), with this size each direction could apply 2MPa of stress;
- (2)
- Disc springs (Figure 2b) were installed between the hydraulic cylinder and the loading plate to simulate the infinite boundary of the surrounding rocks;
- (3)
- Polyvinyl chloride layer was pasted onto the scaled model to reduce the friction between the model and chamber.
4.2. Scale-Model Testing Design
4.3. Similar Material of the Deep Brittle Rock
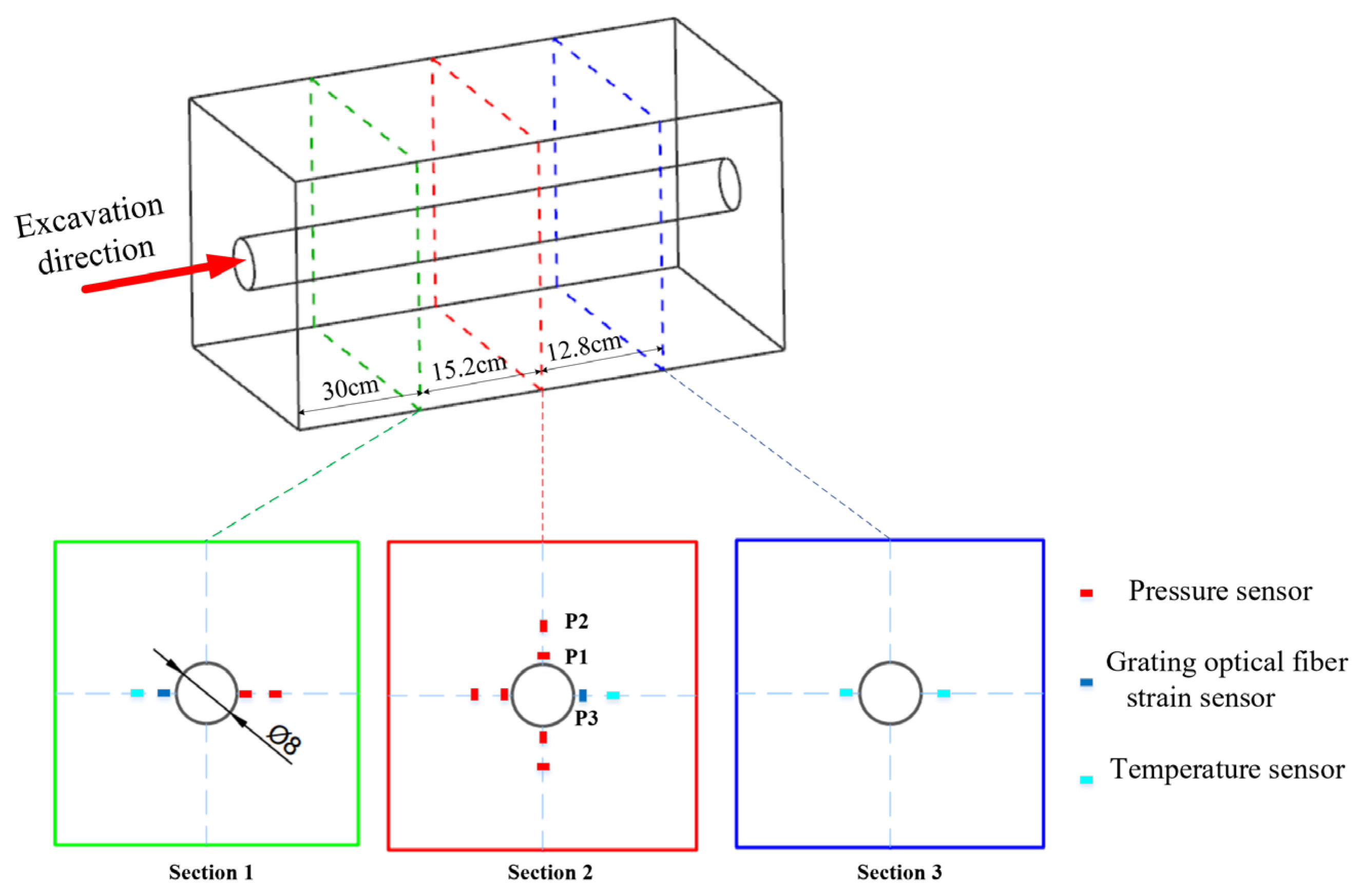
4.4. Monitoring System
4.5. Testing Results
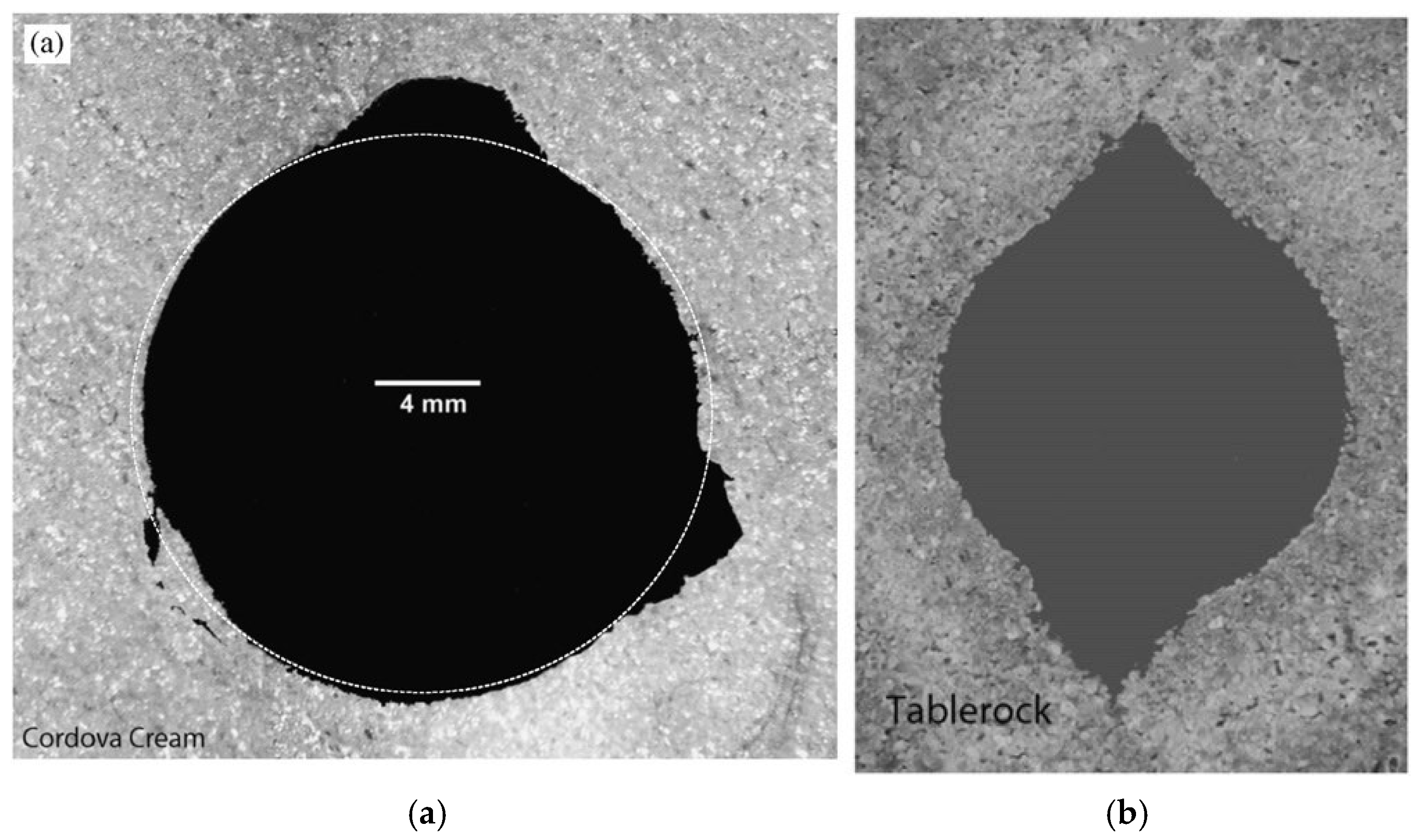
4.5.1. Failure Shape of the Tunnel
4.5.2. Loop Stress Changes During Excavation
4.5.3. Strain Monitoring Data
5. Delayed Failure Time Simulation of the Scale-Model Testing
5.1. Delayed Failure Mechanism and Model Review of the Brittle Rock
5.2. Numerical Model
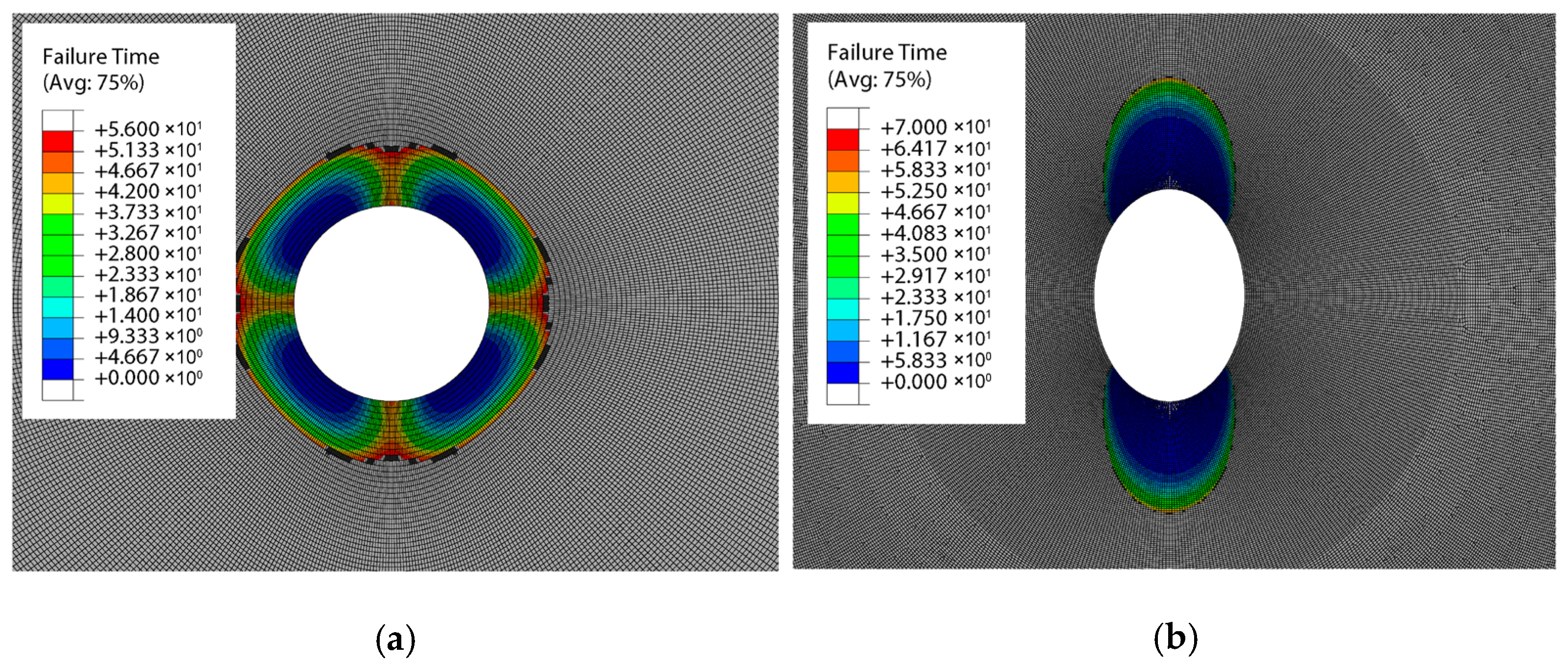
5.3. Simulation Results
6. Conclusions
- (1)
- The scale-model test results show that the failure shape under isotropic geostress has a smooth circle boundary; the delayed failure time is 56 h. While under anisotropic geostress, the failure shape has a dog-eared breakdown; the delayed failure time is 72 h.
- (2)
- The failure mode obtained in the scale-model tests indicates that the loop stress of the tunnel surrounding rock is the main factor for the delayed failure. Under the isotropic geostress condition, the loop stress increases shortly after excavation, and then abruptly drops down. For the anisotropic geostress condition, the loop stress only has a decreasing tend. The surrounding rocks turn from elastic to rapidly plastic after excavation, the turnaround time for this status is shorter for anisotropic geostress.
- (3)
- In the scale-model tests the radial strain increases more slowly during the failure process; the loop strain shows an abrupt change. These results explain the phenomenon of the rapture interfaces mainly following loop direction.
- (4)
- The implementation of the rock delayed failure on an exponential relation was used in the FEM code. The failure time and failure mode results are obtained by numerical simulations. The predicted failure mode obtained by the numerical simulation matches the scale-model testing results, both on the failure boundary and delay failure time. The delayed failure mechanism of the deep brittle rock tunnel was verified by laboratory tests and numerical simulations.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Malan, D.F. Manuel Rocha Medal Recipient Simulating the Time-Dependent Behaviour of Excavations in Hard Rock. Rock Mech. Rock Eng. 2002, 35, 225–254. [Google Scholar] [CrossRef]
- Zhai, S.; Su, G.; Yin, S.; Zhao, B.; Yan, L. Rockburst Characteristics of Several Hard Brittle Rocks: A True Triaxial Experimental Study. J. Rock Mech. Geotech. Eng. 2020, 12, 279–296. [Google Scholar] [CrossRef]
- Keneti, A.; Sainsbury, B.A. Review of Published Rockburst Events and Their Contributing Factors. Eng. Geol. 2018, 246, 361–373. [Google Scholar] [CrossRef]
- Zorin, A.N. Rock Bursts in Deep Mine Workings. Sov. Min. Sci. 1970, 6, 486–490. [Google Scholar] [CrossRef]
- Tan, T.K.; Kang, W.F. Locked in Stresses, Creep and Dilatancy of Rocks, and Constitutive Equations. Rock Mech. Felsmech. Mécanique Des Roches 1980, 13, 5–22. [Google Scholar] [CrossRef]
- Li, S.; Feng, X.T.; Li, Z.; Chen, B.; Zhang, C.; Zhou, H. In Situ Monitoring of Rockburst Nucleation and Evolution in the Deeply Buried Tunnels of Jinping II Hydropower Station. Eng. Geol. 2012, 137–138, 85–96. [Google Scholar] [CrossRef]
- Malan, D.F.; Napier, J.A.L. Rockburst Support in Shallow-Dipping Tabular Stopes at Great Depth. Int. J. Rock Mech. Min. Sci. 2018, 112, 302–312. [Google Scholar] [CrossRef]
- He, M.; Li, J.; Ren, F. Rock Burst Criterion Based on Clay Mineral Content. Arab. J. Geosci. 2020, 13, 185. [Google Scholar] [CrossRef]
- Guo, W.; Li, Y.; Yin, D.; Zhang, S.; Sun, X. Mechanisms of Rock Burst in Hard and Thick Upper Strata and Rock-Burst Controlling Technology. Arab. J. Geosci. 2016, 9, 561. [Google Scholar] [CrossRef]
- Feng, X.; Chen, B.; Ming, H.; Wu, S.; Xiao, Y.; Feng, G.; Zhou, H.; Qiu, S. Evolution Law and Mechanism of Rockbursts in Deep Tunnels: Immediate Rockburst. Chin. J. Rock Mech. Eng. 2012, 31, 433–444. [Google Scholar]
- Li, X.; Konietzky, H. Time to Failure Prediction Scheme for Rocks. Rock Mech Rock Eng. 2014, 47, 1493–1503. [Google Scholar] [CrossRef]
- Liu, H.; Li, L.; Li, S.; Yang, W. The Time-Dependent Failure Mechanism of Rocks and Associated Application in Slope Engineering: An Explanation Based on Numerical Investigation. Math Probl. Eng. 2020, 2020, 1680265. [Google Scholar] [CrossRef]
- Wang, M.; Cai, M. A Grain-Based Time-to-Failure Creep Model for Brittle Rocks. Comput. Geotech. 2020, 119, 103344. [Google Scholar] [CrossRef]
- Gao, A.; Qi, C.; Shan, R.; Wang, C. Predicting Time-to-Failure of Red Sandstone by Temporal Precursor of Acoustic Emission Signals. Geofluids 2022, 2022, 8063469. [Google Scholar] [CrossRef]
- Kovrizhnykh, A.M.; Baryshnikov, V.D.; Khmelinin, A.P. Determining Time-to-Failure in Rocks Using Long-Term Strength Criterion. J. Min. Sci. 2023, 59, 911–918. [Google Scholar] [CrossRef]
- Chen, S.; Zhao, P.; Jiao, Z.; Zhou, J.; Tang, X. Time-Lag Characteristics and Strength Evolution of Rock Failure under Unloading Conditions. Phys. Fluids 2025, 37, 054106. [Google Scholar] [CrossRef]
- Tang, C.; Wang, J.; Zhang, J. Preliminary Engineering Application of Microseismic Monitoring Technique to Rockburst Prediction in Tunneling of Jinping II Project. J. Rock Mech. Geotech. Eng. 2010, 2, 193–208. [Google Scholar] [CrossRef]
- Fan, Y.; Cui, X.; Leng, Z.; Zheng, J.; Wang, F.; Xu, X. Rockburst Prediction From the Perspective of Energy Release: A Case Study of a Diversion Tunnel at Jinping II Hydropower Station. Front. Earth Sci. 2021, 9, 711706. [Google Scholar] [CrossRef]
- Zhao, Z.N.; Feng, X.T.; Chen, T.Y.; Feng, G.L.; Liu, G.F.; Duan, S.Q. Correlation between Time-Delayed Rockburst and Blasting Disturbance in Deep-Buried Tunnel. Rock Characterisation, Modelling and Engineering Design Methods. In Proceedings of the 3rd ISRM SINOROCK 2013 Symposium, Shanghai, China, 18–20 June 2013; pp. 773–776. [Google Scholar] [CrossRef]
- Fumagalli, E. Statical and Geomechanical Models; Springer: Berlin/Heidelberg, Germany, 1973. [Google Scholar]
- Zhang, Q.; Liu, C.; Duan, K.; Zhang, Z.; Xiang, W. True Three-Dimensional Geomechanical Model Tests for Stability Analysis of Surrounding Rock During the Excavation of a Deep Underground Laboratory. Rock Mech. Rock Eng. 2020, 53, 517–537. [Google Scholar] [CrossRef]
- Zhu, W.S.; Zhang, Q.B.; Zhu, H.H.; Li, Y.; Yin, J.-H.; Li, S.C.; Sun, L.F.; Zhang, L. Large-Scale Geomechanical Model Testing of an Underground Cavern Group in a True Three-Dimensional (3-D) Stress State. Can. Geotech. J. 2010, 47, 935–946. [Google Scholar] [CrossRef]
- Hillig, W.B. The C-H Delayed Failure Mechanism Revisited. Int. J. Fract. 2006, 139, 197–211. [Google Scholar] [CrossRef]
- Schoenball, M.; Sahara, D.P.; Kohl, T. Time-Dependent Brittle Creep as a Mechanism for Time-Delayed Wellbore Failure. Int. J. Rock Mech. Min. Sci. 2014, 70, 400–406. [Google Scholar] [CrossRef]
- Wang, M.; Zhang, N.; Li, J.; Ma, L.; Fan, P. Computational Method of Large Deformation and Its Application in Deep Mining Tunnel. Tunn. Undergr. Space Technol. 2015, 50, 47–53. [Google Scholar] [CrossRef]
- Amitrano, D.; Helmstetter, A. Brittle Creep, Damage, and Time to Failure in Rocks. J. Geophys. Res. Solid Earth 2006, 111, 1–17. [Google Scholar] [CrossRef]
- Hoek, E.; Martin, C.D. Fracture Initiation and Propagation in Intact Rock—A Review. J. Rock Mech. Geotech. Eng. 2014, 6, 287–300. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Loading Scheme | /MPa | /MPa | /MPa |
|---|---|---|---|
| Isotropic | 0.88 | 0.88 | 0.88 |
| Anisotropic | 0.88 | 2.83 | 3.95 |
| Parameters | Prototype Rock | Similar Material |
|---|---|---|
| Density ρ/kg/m3 | 27.7 | 27.7 |
| Elastic module E/MPa | 16,950 | 232.0 |
| Poisson’s ratio | 0.23 | 0.23 |
| Cohesive c/MPa | 1.1 | 0.02 |
| Fiction angle | 44.5 | 44.9 |
| Compression strength /MPa | 70.0 | 0.79 |
| Tension strength /MPa | 5000 | 67.6 |
| Parameters | /s | /MPa | |
|---|---|---|---|
| Value | 2.0 × 1012 | 16.0 | 3.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, N.; Chen, Z. Scale-Model Experiment on the Delayed Failure Mechanism of Deep Tunnels in Brittle Rock. Appl. Sci. 2025, 15, 7496. https://doi.org/10.3390/app15137496
Zhang N, Chen Z. Scale-Model Experiment on the Delayed Failure Mechanism of Deep Tunnels in Brittle Rock. Applied Sciences. 2025; 15(13):7496. https://doi.org/10.3390/app15137496
Chicago/Turabian StyleZhang, Ning, and Ziwei Chen. 2025. "Scale-Model Experiment on the Delayed Failure Mechanism of Deep Tunnels in Brittle Rock" Applied Sciences 15, no. 13: 7496. https://doi.org/10.3390/app15137496
APA StyleZhang, N., & Chen, Z. (2025). Scale-Model Experiment on the Delayed Failure Mechanism of Deep Tunnels in Brittle Rock. Applied Sciences, 15(13), 7496. https://doi.org/10.3390/app15137496