
Enhancing Drone Navigation and Control: Gesture-Based Piloting, Obstacle Avoidance, and 3D Trajectory Mapping



Abstract
1. Introduction
2. Materials and Methods
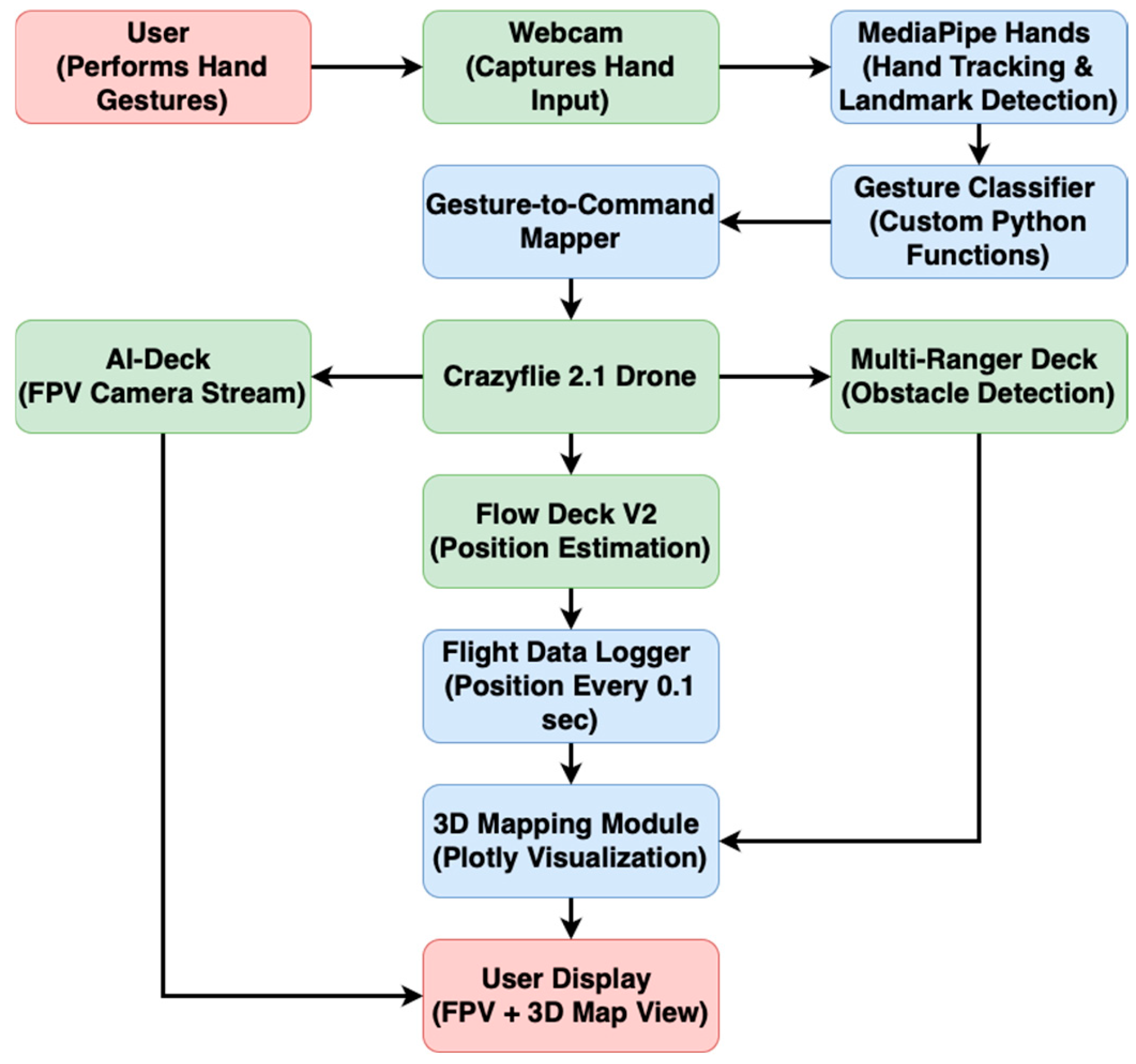
2.1. Integrated System Architecture and Workflow
2.2. Hardware and Software Components
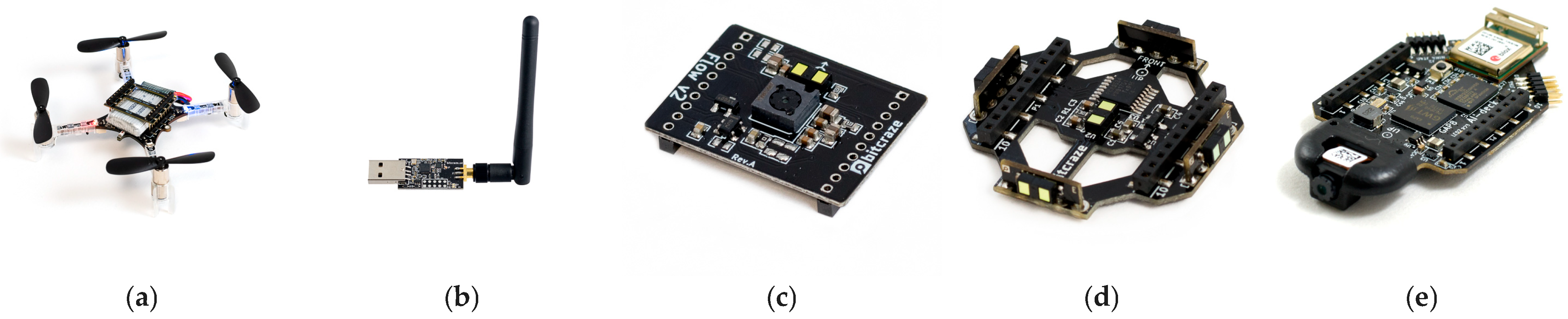
- Crazyflie 2.1 Drone: Figure 2a illustrates the main aerial platform for this research. It is a lightweight, open-source nano quadcopter developed by Bitcraze, equipped with an STM32F405 microcontroller, built-in IMU, and expansion deck support via an easy-to-use pin header system [23]. Its modular design allows seamless integration of multiple decks for advanced sensing and control functionalities.
- Crazyradio PA: Figure 2b is a 2.4 GHz radio dongle used to establish wireless communication between the host computer and the Crazyflie 2.1 drone [24]. The PA (Power Amplifier) version enhances signal strength and communication reliability, particularly in environments with interference or extended range requirements.
- AI-Deck 1.1: Figure 2e features a camera module for video streaming, allowing users to navigate the drone beyond their direct line of sight [27]. The AI-Deck includes a GAP8 RISC-V multi-core processor, enabling onboard image processing and low-latency streaming to a ground station. A Linux system is required for setting up and flashing the AI-Deck, as the software tools provided by Bitcraze (Malmö, Sweden), such as the GAP8 SDK, are optimized for Linux-based environments.
2.3. Code Implementation and System Logic
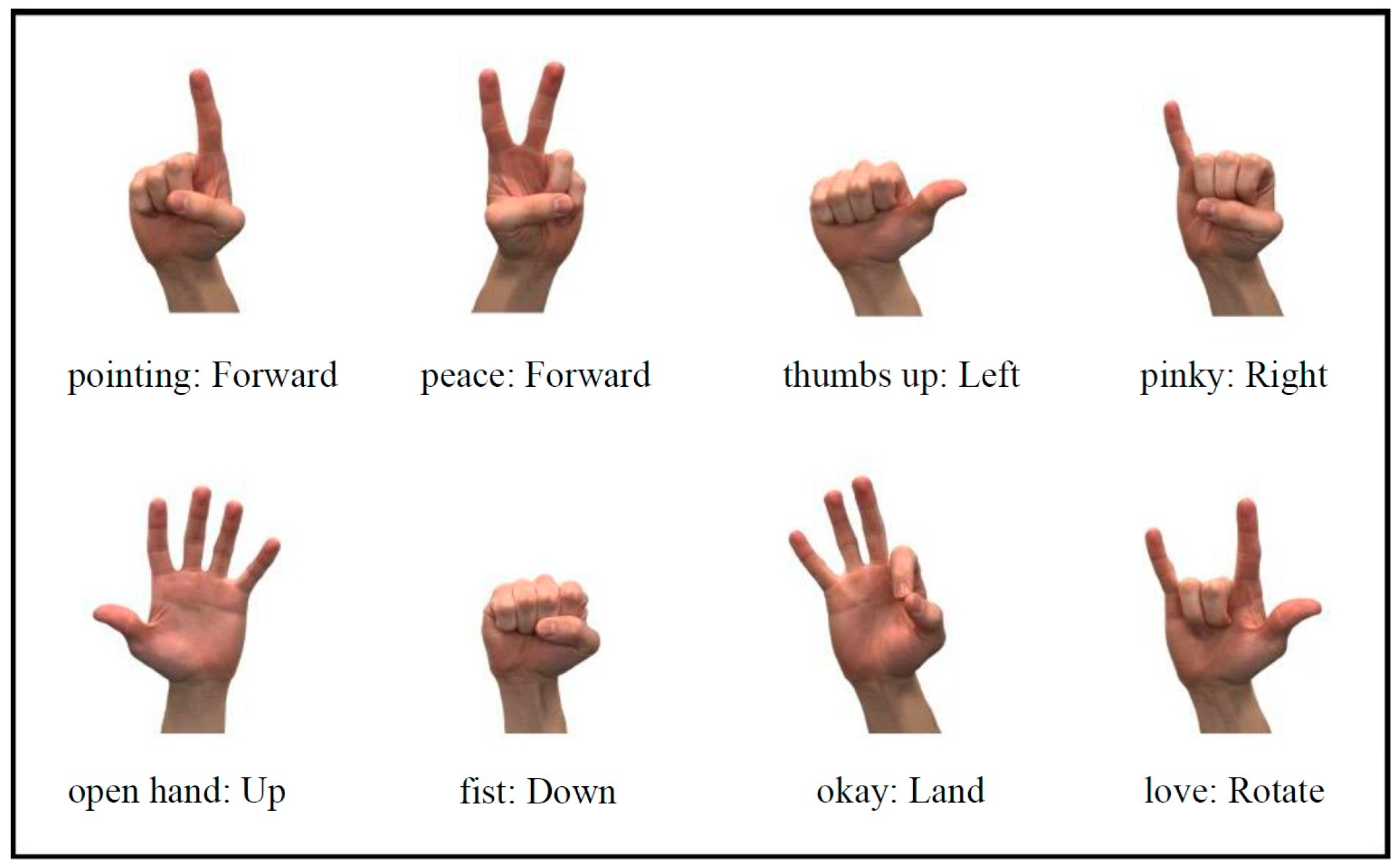
2.4. Hand Gesture Recognition and Control
- A “pointing” gesture moves the drone forward.
- A “peace” gesture moves the drone backward.
- A “thumbs up” gesture moves the drone to the left.
- A “pinky” gesture moves the drone to the right.
- An “open hand” gesture triggers the drone to ascend (up).
- A “fist” gesture triggers the drone to descend (down).
- An “okay” gesture triggers the drone to land.
- A “love” gesture triggers the drone to rotate.
2.5. Obstacle Avoidance System
2.6. 3D Mapping and Flight Data Logging
2.7. Experimental Setup and Testing Procedure
- Hand Gesture Control Test: Users performed predefined hand gestures in front of a webcam to verify accurate classification and execution of drone commands. Each gesture was tested multiple times to assess recognition accuracy and command responsiveness.
- Obstacle Avoidance Test: The drone was commanded to move forward while obstacles were placed in randomized positions along its path. The system’s ability to detect and avoid obstacles within the safety threshold was analyzed, recording the reliability of avoidance maneuvers and any unintended collisions.
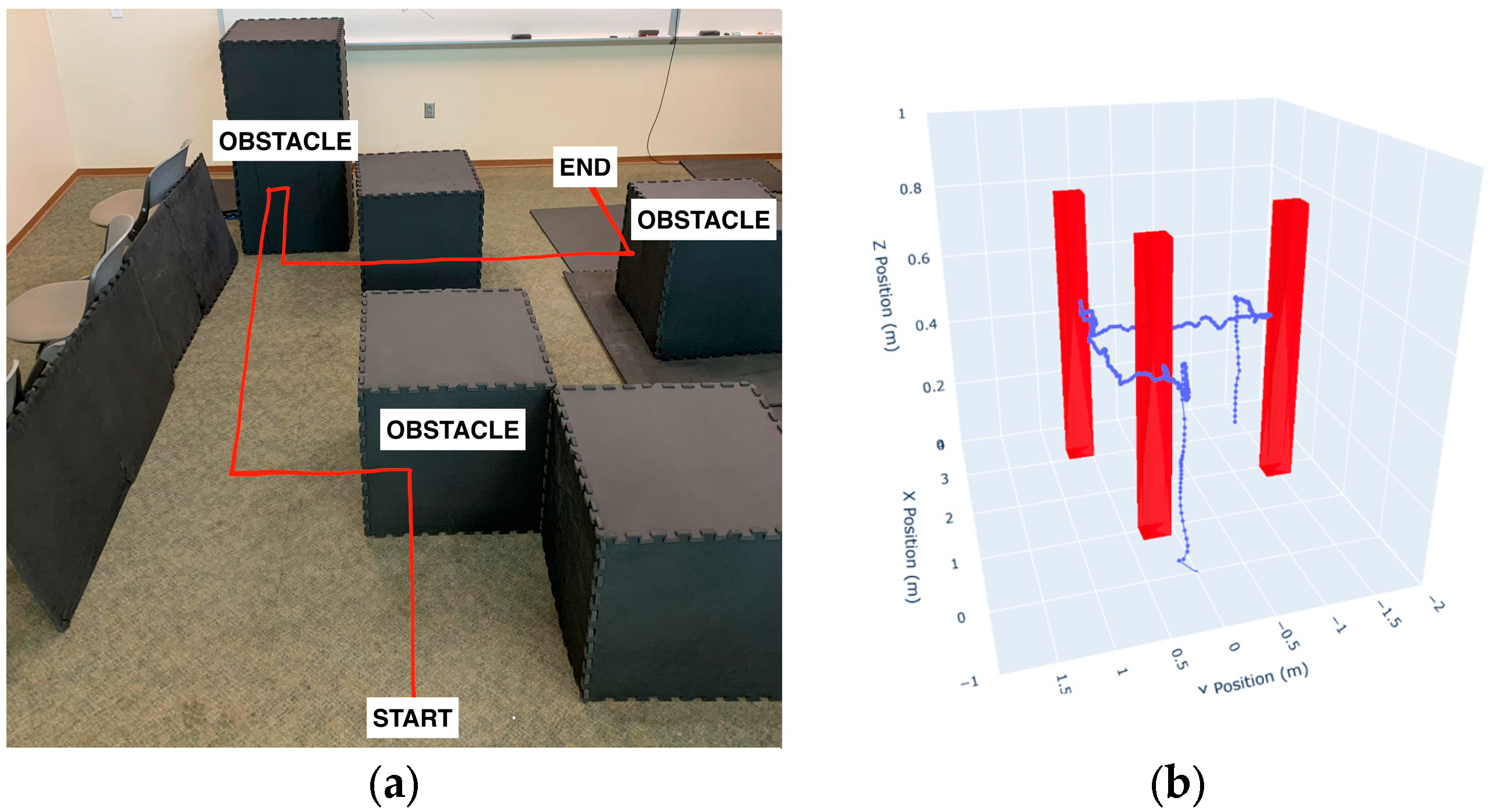
- 3D Mapping Validation: To assess mapping accuracy, the recorded flight path and obstacle locations were compared to real-world measurements. Errors in obstacle placement and discrepancies in flight path representation were quantified.
2.8. Data Availability
3. Results
3.1. Obstacle Avoidance Performance
3.1.1. Obstacle Detection and Response
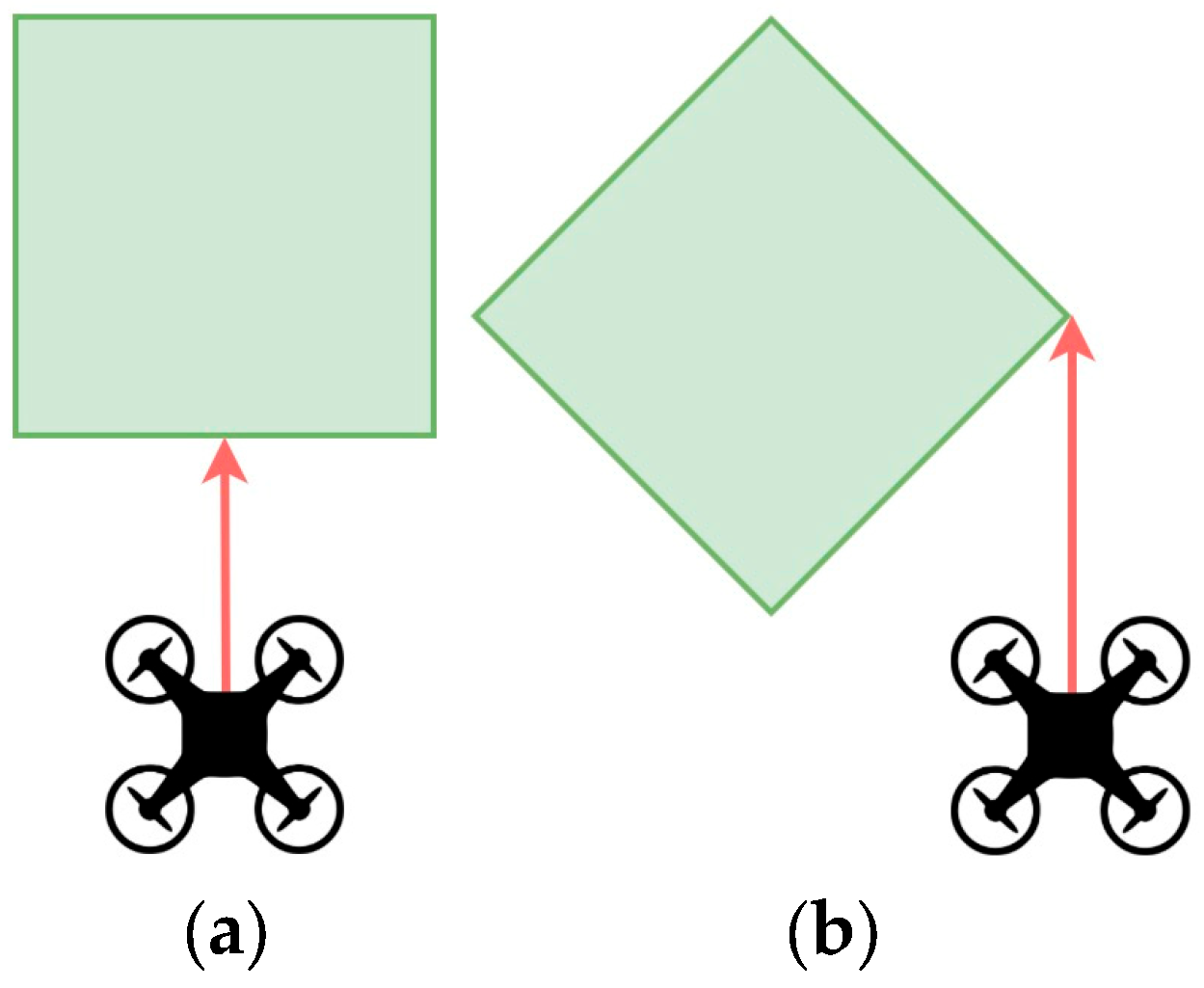
3.1.2. Obstacle Response During Perpendicular vs. Angled Approaches
3.2. Hand Gesture Recognition Performance
3.2.1. Gesture Recognition Accuracy
- Gesture Misclassification: The system occasionally misinterpreted one gesture as another (Figure 8b), especially when switching between gestures, leading to unintended drone movements. Also, if a gesture was presented at an unfavorable angle or partially obscured, it sometimes failed to register as any labeled gesture (Figure 8c), resulting in no response from the drone.
- Lighting Conditions: Bright, even lighting improved recognition, while dim or uneven lighting sometimes led to unstable tracking of landmarks.
- External Hand Interference: If another person’s hand entered the camera’s field of view, the system sometimes detected it as an input, disrupting the control process.

3.2.2. User Experience and Usability
- Memorizing multiple gestures and associating them with their corresponding drone commands.
- Maintaining proper hand positioning in front of the camera to ensure accurate recognition.
- Balancing attention between their hand gestures and the drone’s movement, particularly when not relying on the AI deck’s streamed FPV footage.
3.3. 3D Mapping and Flight Path Analysis
3.4. Integrated System Performance: Gesture Control and Obstacle Avoidance
3.4.1. Interaction Between Gesture Control and Obstacle Avoidance
3.4.2. AI-Deck Streaming and Remote Navigation
3.4.3. System Latency Analysis
3.5. Comparison with Existing Gesture-Controlled Drone Systems
4. Discussion
4.1. Gesture Recognition and User Interaction
4.2. Obstacle Avoidance and Power Limitations
4.3. 3D Mapping and Visualization Accuracy
4.4. Validity Considerations and Future Work
- Internal Validity—The gesture recognition and drone control were tested under controlled indoor conditions with stable lighting and minimal distractions. Performance may decline in less controlled, real-world environments where lighting, background activity, or camera positioning vary significantly.
- Construct Validity—The predefined gestures selected for this study may not be universally intuitive for all users, potentially influencing usability outcomes. Furthermore, users’ hand size, motion speed, and articulation could impact gesture recognition reliability.
- External Validity—The findings are based on a specific hardware setup (Crazyflie 2.1, MediaPipe Hands, and AI-Deck). Results may not generalize to other drone models or hardware configurations without significant reengineering.
- Reliability Threats—System performance may degrade over prolonged use due to sensor drift, thermal effects, or battery limitations. Additionally, the gesture classification system may face reduced robustness in multi-user settings or when exposed to unintended hand movements.
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CMC | Carpometacarpal |
| DIP | Distal Interphalangeal |
| FOV | Field of View |
| FPV | First-Person View |
| IMU | Inertial Measurement Unit |
| MCP | Metacarpophalangeal |
| PA | Power Amplifier |
| PIP | Proximal Interphalangeal |
| SLAM | Simultaneous Localization and Mapping |
| ToF | Time-of-Flight |
| UAV | Unmanned Aerial Vehicle |
References
- Amicone, D.; Cannas, A.; Marci, A.; Tortora, G. A smart capsule equipped with artificial intelligence for autonomous delivery of medical material through drones. Appl. Sci. 2021, 11, 7976. [Google Scholar] [CrossRef]
- Hu, D.; Li, S.; Du, J.; Cai, J. Automating building damage reconnaissance to optimize drone mission planning for disaster response. J. Comput. Civ. Eng. 2023, 37, 04023006. [Google Scholar] [CrossRef]
- Nooralishahi, P.; López, F.; Maldague, X.P. Drone-enabled multimodal platform for inspection of industrial components. IEEE Access 2022, 10, 41429–41443. [Google Scholar] [CrossRef]
- Nwaogu, J.M.; Yang, Y.; Chan, A.P.; Wang, X. Enhancing drone operator competency within the construction industry: Assessing training needs and roadmap for skill development. Buildings 2024, 14, 1153. [Google Scholar] [CrossRef]
- Tezza, D.; Laesker, D.; Andujar, M. The learning experience of becoming a FPV drone pilot. In Proceedings of the 2021 ACM/IEEE International Conference on Human-Robot Interaction, Boulder, CO, USA, 8–11 March 2021. [Google Scholar]
- Lawrence, I.D.; Pavitra, A.R.R. Voice-controlled drones for smart city applications. In Sustainable Innovation for Industry 6.0; IGI Global: Hershey, PA, USA, 2024; pp. 162–177. [Google Scholar]
- Shin, S.-Y.; Kang, Y.-W.; Kim, Y.-G. Hand gesture-based wearable human-drone interface for intuitive movement control. In Proceedings of the 2019 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 11–13 January 2019. [Google Scholar]
- Naseer, F.; Ullah, G.; Siddiqui, M.A.; Khan, M.J.; Hong, K.-S.; Naseer, N. Deep learning-based unmanned aerial vehicle control with hand gesture and computer vision. In Proceedings of the 2022 13th Asian Control Conference (ASCC), Jeju Island, Republic of Korea, 4–7 May 2022. [Google Scholar]
- Google. Hand Landmarks Detection Guide. Available online: https://ai.google.dev/edge/mediapipe/solutions/vision/hand_landmarker (accessed on 4 May 2025).
- Hayat, A.; Li, C.H.; Prakoso, N.; Zheng, R.; Wyawahare, A.; Wu, J. Gesture and Body Position Control for Lightweight Drones Using Remote Machine Learning Framework. In Innovations in Electrical and Electronics Engineering, Proceedings of the ICEEE 2024, Marmaris, Turkey, 22–24 April 2024; Springer: Singapore, 2025. [Google Scholar]
- Bae, S.; Park, H.-S. Development of immersive virtual reality-based hand rehabilitation system using a gesture-controlled rhythm game with vibrotactile feedback: An fNIRS pilot study. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 31, 3732–3743. [Google Scholar] [CrossRef]
- Manikanavar, A.R.; Shirol, S.B. Gesture controlled assistive device for deaf, dumb and blind people using Raspberry-Pi. In Proceedings of the 2022 International Conference on Smart Technologies and Systems for Next Generation Computing (ICSTSN), Virtual, 25–26 March 2022. [Google Scholar]
- Paterson, J.; Aldabbagh, A. Gesture-controlled robotic arm utilizing opencv. In Proceedings of the 2021 3rd International Congress on Human-Computer Interaction, Optimization and Robotic Applications (HORA), Ankara, Turkey, 11–13 June 2021. [Google Scholar]
- Seidu, I.; Lawal, J.O. Personalized Drone Interaction: Adaptive Hand Gesture Control with Facial Authentication. Int. J. Sci. Res. Sci. Eng. Technol. 2024, 11, 43–60. [Google Scholar] [CrossRef]
- Alanezi, M.A.; Haruna, Z.; Sha’aban, Y.A.; Bouchekara, H.R.; Nahas, M.; Shahriar, M.S. Obstacle avoidance-based autonomous navigation of a quadrotor system. Drones 2022, 6, 288. [Google Scholar] [CrossRef]
- Xue, Z.; Gonsalves, T. Vision based drone obstacle avoidance by deep reinforcement learning. AI 2021, 2, 366–380. [Google Scholar] [CrossRef]
- Ostovar, I. Nano-Drones: Enabling Indoor Collision Avoidance with a Miniaturized Multi-Zone Time of Flight Sensor. Master’s Thesis, Politecnico di Torino, Torino, Italy, 2022. [Google Scholar]
- Courtois, H.; Aouf, N.; Ahiska, K.; Cecotti, M. OAST: Obstacle avoidance system for teleoperation of UAVs. IEEE Trans. Hum.-Mach. Syst. 2022, 52, 157–168. [Google Scholar] [CrossRef]
- Bouwmeester, R.J.; Paredes-Vallés, F.; De Croon, G.C. Nanoflownet: Real-time dense optical flow on a nano quadcopter. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023. [Google Scholar]
- Khoza, N.; Owolawi, P.; Malele, V. Drone Gesture Control using OpenCV and Tello. In Proceedings of the 2024 Conference on Information Communications Technology and Society (ICTAS), Durban, South Africa, 7–8 March 2024. [Google Scholar]
- Zhang, N.; Nex, F.; Vosselman, G.; Kerle, N. End-to-end nano-drone obstacle avoidance for indoor exploration. Drones 2024, 8, 33. [Google Scholar] [CrossRef]
- Telli, K.; Kraa, O.; Himeur, Y.; Ouamane, A.; Boumehraz, M.; Atalla, S.; Mansoor, W. A comprehensive review of recent research trends on unmanned aerial vehicles (UAVs). Systems 2023, 11, 400. [Google Scholar] [CrossRef]
- Bitcraze. Crazyflie 2.1. Available online: https://www.bitcraze.io/products/old-products/crazyflie-2-1/ (accessed on 18 April 2025).
- Bitcraze. Crazyradio PA. Available online: https://www.bitcraze.io/products/crazyradio-pa/ (accessed on 18 April 2025).
- Bitcraze. Flow Deck v2. Available online: https://store.bitcraze.io/products/flow-deck-v2 (accessed on 14 April 2025).
- Bitcraze. Multi-Ranger Deck. Available online: https://store.bitcraze.io/products/multi-ranger-deck (accessed on 14 April 2025).
- Bitcraze. AI-Deck 1.1. Available online: https://store.bitcraze.io/products/ai-deck-1-1 (accessed on 14 April 2025).
- Yun, G.; Kwak, H.; Kim, D.H. Single-Handed Gesture Recognition with RGB Camera for Drone Motion Control. Appl. Sci. 2024, 14, 10230. [Google Scholar] [CrossRef]
- Lee, J.-W.; Yu, K.-H. Wearable drone controller: Machine learning-based hand gesture recognition and vibrotactile feedback. Sensors 2023, 23, 2666. [Google Scholar] [CrossRef] [PubMed]
- Natarajan, K.; Nguyen, T.-H.D.; Mete, M. Hand gesture controlled drones: An open source library. In Proceedings of the 2018 1st International Conference on Data Intelligence and Security (ICDIS), South Padre Island, TX, USA, 8–10 April 2018. [Google Scholar]
- Begum, T.; Haque, I.; Keselj, V. Deep learning models for gesture-controlled drone operation. In Proceedings of the 2020 16th International Conference on Network and Service Management (CNSM), Virtual, 2–6 November 2020. [Google Scholar]
- Backman, K.; Kulić, D.; Chung, H. Reinforcement learning for shared autonomy drone landings. Auton. Robot. 2023, 47, 1419–1438. [Google Scholar] [CrossRef]
- Schwalb, J.; Menon, V.; Tenhundfeld, N.; Weger, K.; Mesmer, B.; Gholston, S. A study of drone-based AI for enhanced human-AI trust and informed decision making in human-AI interactive virtual environments. In Proceedings of the 2022 IEEE 3rd International Conference on Human-Machine Systems (ICHMS), Orlando, FL, USA, 7–19 November 2022. [Google Scholar]
- Khaksar, S.; Checker, L.; Borazjan, B.; Murray, I. Design and Evaluation of an Alternative Control for a Quad-Rotor Drone Using Hand-Gesture Recognition. Sensors 2023, 23, 5462. [Google Scholar] [CrossRef]
- Moffatt, A.; Platt, E.; Mondragon, B.; Kwok, A.; Uryeu, D.; Bhandari, S. Obstacle detection and avoidance system for small UAVs using a LiDAR. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020. [Google Scholar]
- Karam, S.; Nex, F.; Chidura, B.T.; Kerle, N. Microdrone-based indoor mapping with graph slam. Drones 2022, 6, 352. [Google Scholar] [CrossRef]
- Krul, S.; Pantos, C.; Frangulea, M.; Valente, J. Visual SLAM for indoor livestock and farming using a small drone with a monocular camera: A feasibility study. Drones 2021, 5, 41. [Google Scholar] [CrossRef]
- Sacoto-Martins, R.; Madeira, J.; Matos-Carvalho, J.P.; Azevedo, F.; Campos, L.M. Multi-purpose low latency streaming using unmanned aerial vehicles. In Proceedings of the 2020 12th International Symposium on Communication Systems, Networks and Digital Signal Processing (CSNDSP), Porto, Portugal, 20–22 July 2020. [Google Scholar]
- Truong, N.Q.; Nguyen, P.H.; Nam, S.H.; Park, K.R. Deep learning-based super-resolution reconstruction and marker detection for drone landing. IEEE Access 2019, 7, 61639–61655. [Google Scholar] [CrossRef]
- Lee, S.H. Real-time edge computing on multi-processes and multi-threading architectures for deep learning applications. Microprocess. Microsyst. 2022, 92, 104554. [Google Scholar] [CrossRef]
- Elbamby, M.S.; Perfecto, C.; Bennis, M.; Doppler, K. Toward low-latency and ultra-reliable virtual reality. IEEE Netw. 2018, 32, 78–84. [Google Scholar] [CrossRef]
- Hu, B.; Wang, J. Deep learning based hand gesture recognition and UAV flight controls. Int. J. Autom. Comput. 2020, 17, 17–29. [Google Scholar] [CrossRef]
- Lyu, H. Detect and avoid system based on multi sensor fusion for UAV. In Proceedings of the 2018 International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Republic of Korea, 17–19 October 2018. [Google Scholar]
- Habib, Y. Monocular SLAM Densification for 3D Mapping and Autonomous Drone Navigation. Ph.D. Thesis, Ecole Nationale Supérieure Mines-Télécom Atlantique, Nantes, France, 2024. [Google Scholar]
- Gao, J.; Lee, J.; Zhou, Y.; Hu, Y.; Liu, C.; Zhu, P. SwarmCVT: Centroidal Voronoi Tessellation-Based Path Planning for Very-Large-Scale Robotics. arXiv 2024, arXiv:2410.02510. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Obstacle Location | Avoidance Success Rate (%) |
|---|---|
| Forward | 100 |
| Backward | 100 |
| Left | 100 |
| Right | 100 |
| Angled | 100 |
| Hand Gesture | Accuracy |
|---|---|
| Pointing | 100 |
| Peace | 88 |
| Thumbs Up | 96 |
| Pinky | 100 |
| Open Hand | 100 |
| Fist | 100 |
| Okay | 100 |
| Love | 100 |
| Components | Deviation (cm) |
|---|---|
| Flight Path | 0 |
| Obstacle 1 | 11 |
| Obstacle 2 | 5 |
| Obstacle 3 | 4 |
| Action | Latency (ms) | Std Dev (ms) |
|---|---|---|
| AI-Deck to Host PC | 100 | ±50 |
| Gesture Detection | 200 | ±50 |
| Command Transmission | 4 | ±1 |
| Command Execution | 5 | ±2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Taylor, B.; Allen, M.; Henson, P.; Gao, X.; Malik, H.; Zhu, P. Enhancing Drone Navigation and Control: Gesture-Based Piloting, Obstacle Avoidance, and 3D Trajectory Mapping. Appl. Sci. 2025, 15, 7340. https://doi.org/10.3390/app15137340
Taylor B, Allen M, Henson P, Gao X, Malik H, Zhu P. Enhancing Drone Navigation and Control: Gesture-Based Piloting, Obstacle Avoidance, and 3D Trajectory Mapping. Applied Sciences. 2025; 15(13):7340. https://doi.org/10.3390/app15137340
Chicago/Turabian StyleTaylor, Ben, Mathew Allen, Preston Henson, Xu Gao, Haroon Malik, and Pingping Zhu. 2025. "Enhancing Drone Navigation and Control: Gesture-Based Piloting, Obstacle Avoidance, and 3D Trajectory Mapping" Applied Sciences 15, no. 13: 7340. https://doi.org/10.3390/app15137340
APA StyleTaylor, B., Allen, M., Henson, P., Gao, X., Malik, H., & Zhu, P. (2025). Enhancing Drone Navigation and Control: Gesture-Based Piloting, Obstacle Avoidance, and 3D Trajectory Mapping. Applied Sciences, 15(13), 7340. https://doi.org/10.3390/app15137340