

Experimental Test of Continuous Wave Frequency Diverse Array Doppler Radar †


Abstract
1. Introduction
- Brady [25]: two element FDA waveform testbed with a (typical) carrier frequency of 10 GHz. Signal generation was accomplished by an arbitrary waveform generator (AWG).
- Eker [26]: linear frequency modulated (LFM) FDA. Carrier frequency of 3 GHz with signal generation accomplished by a single LFM-CW source and a delay network.
- Munson [30]: linear FDA using Ettus Universal Software Radio Peripheral (USRP) x310 software defined radios (SDR) as the transceivers. The array had a designed carrier frequency of 2.4 GHz.
- Munson [31]: linear FDA with binary phase-shift keying modulations using an AWG. The array had a designed carrier frequency of 720 MHz.
- We experimentally demonstrate both the temporal periodicity and angular scanning behavior of the FDA far-field pattern.
- We experimentally demonstrate basic radar functionality inside an anechoic chamber with a binary target detection test.
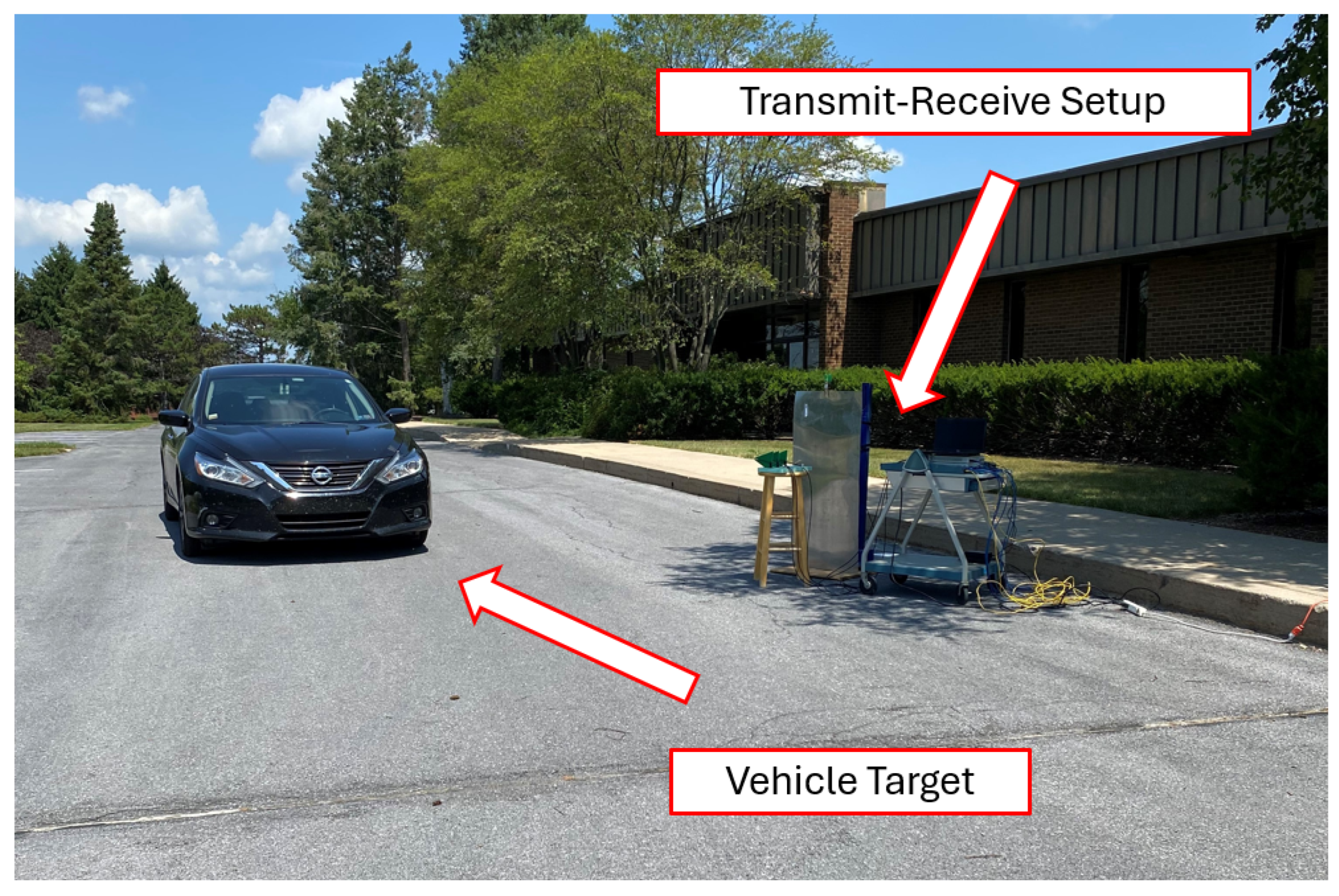
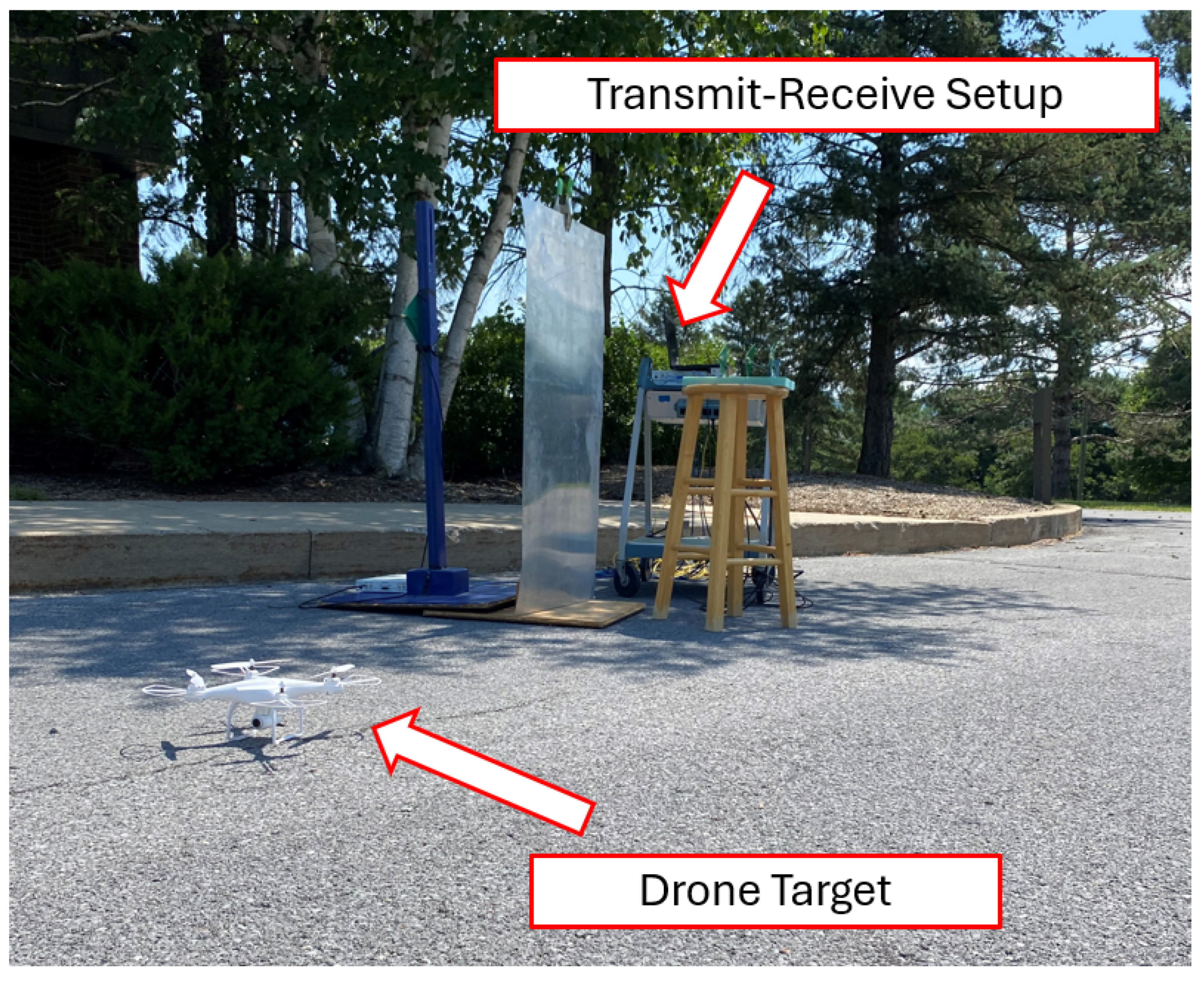
- We capture the Doppler information from two different moving targets: a car and a drone.
- We use time–frequency analysis on experimentally captured micro-Doppler data to extract information about rotating propellers.
2. Data Collection I: Far-Field Beampattern
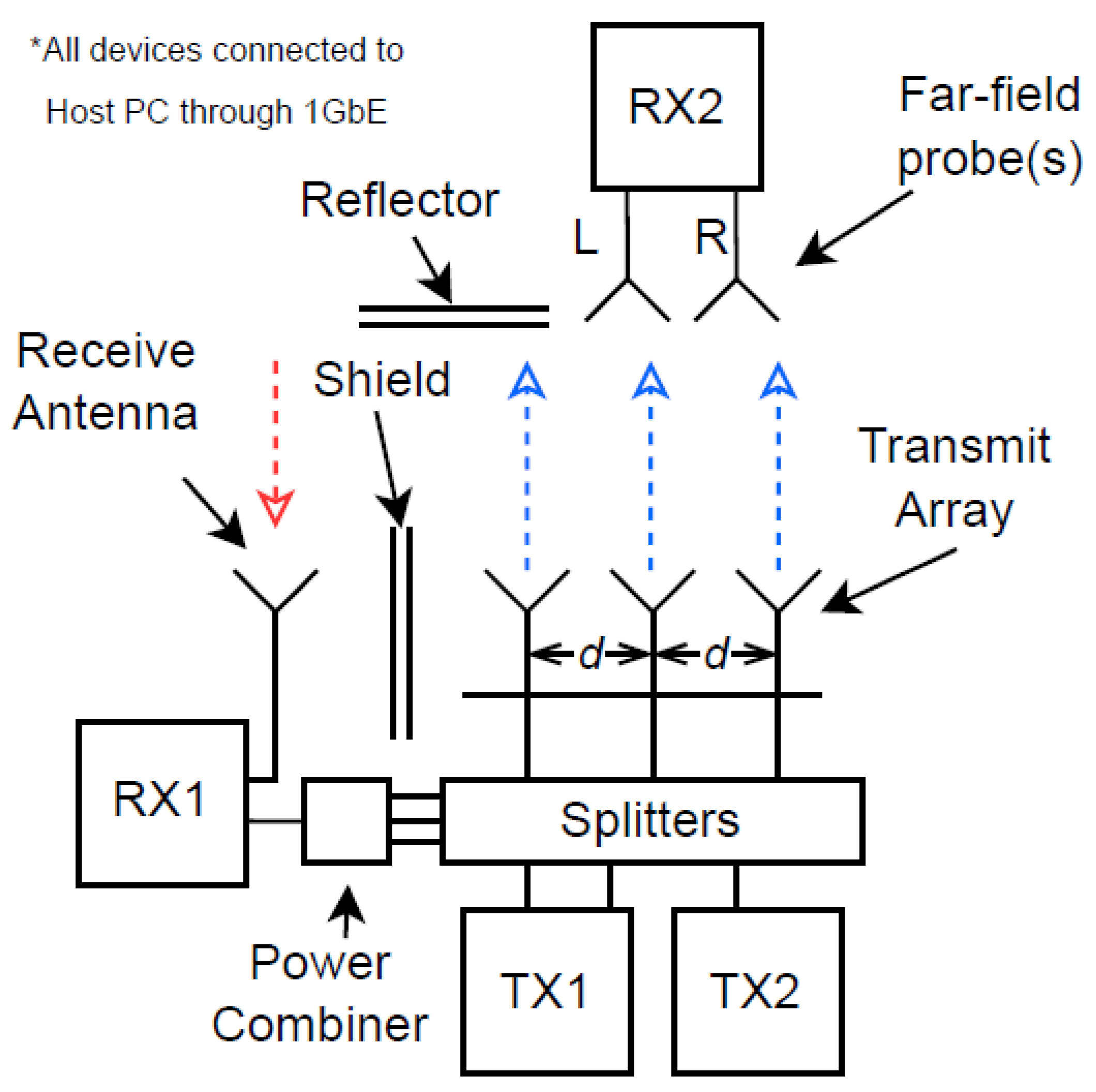
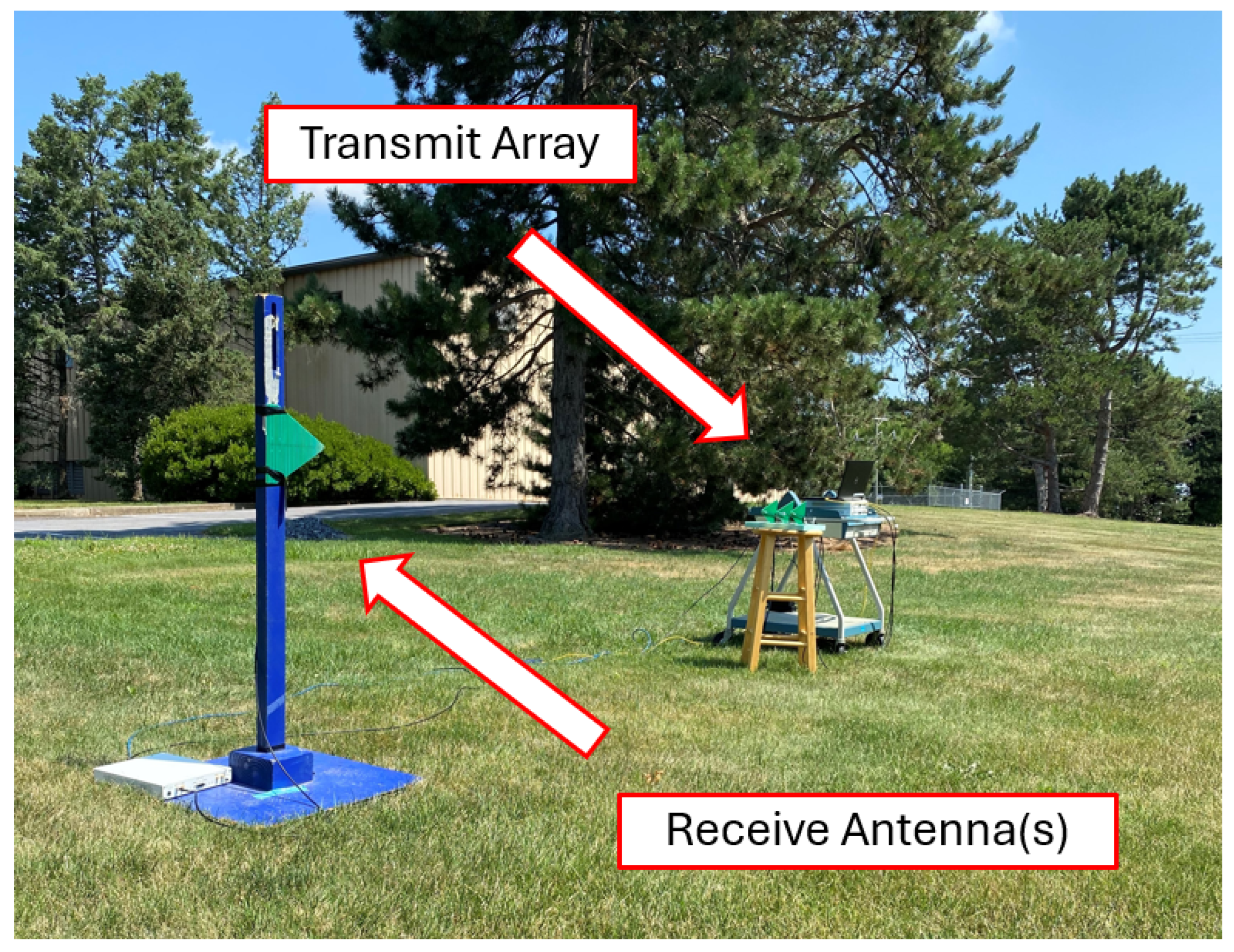
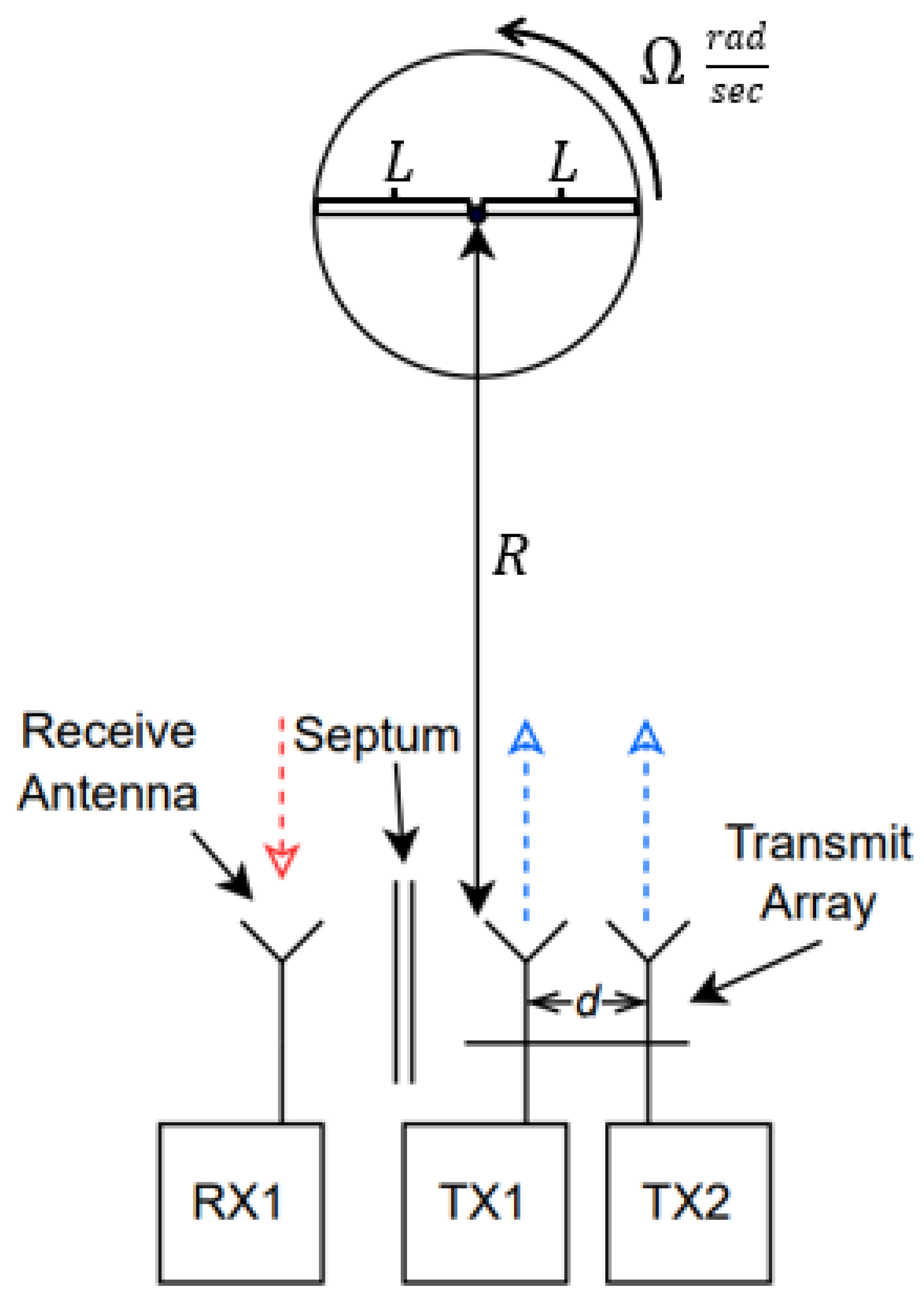
2.1. Hardware and System Overview
2.2. Far-Field Signal Model
2.3. Far-Field Distance Calculation
2.4. Expected Behavior at Baseband
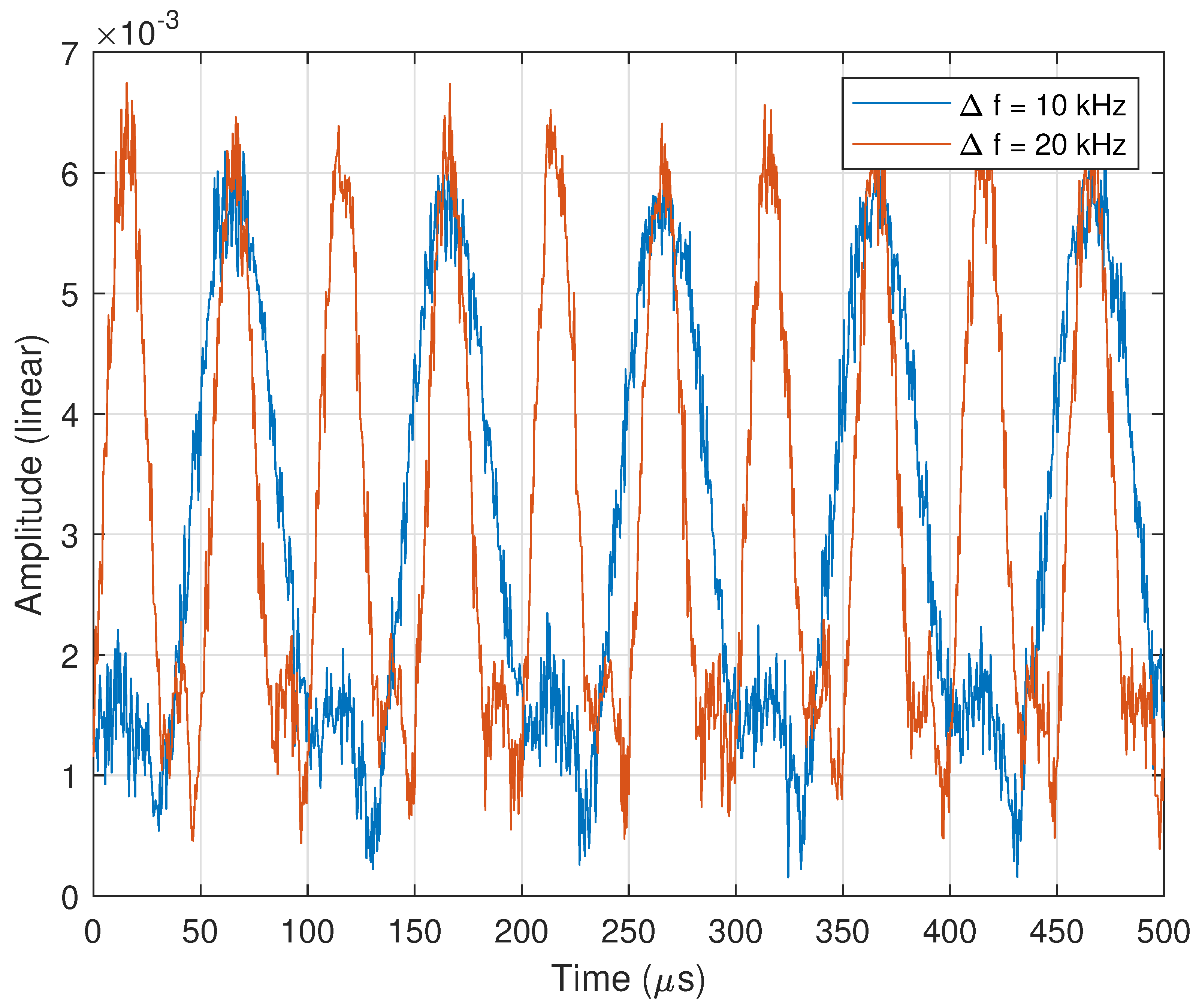
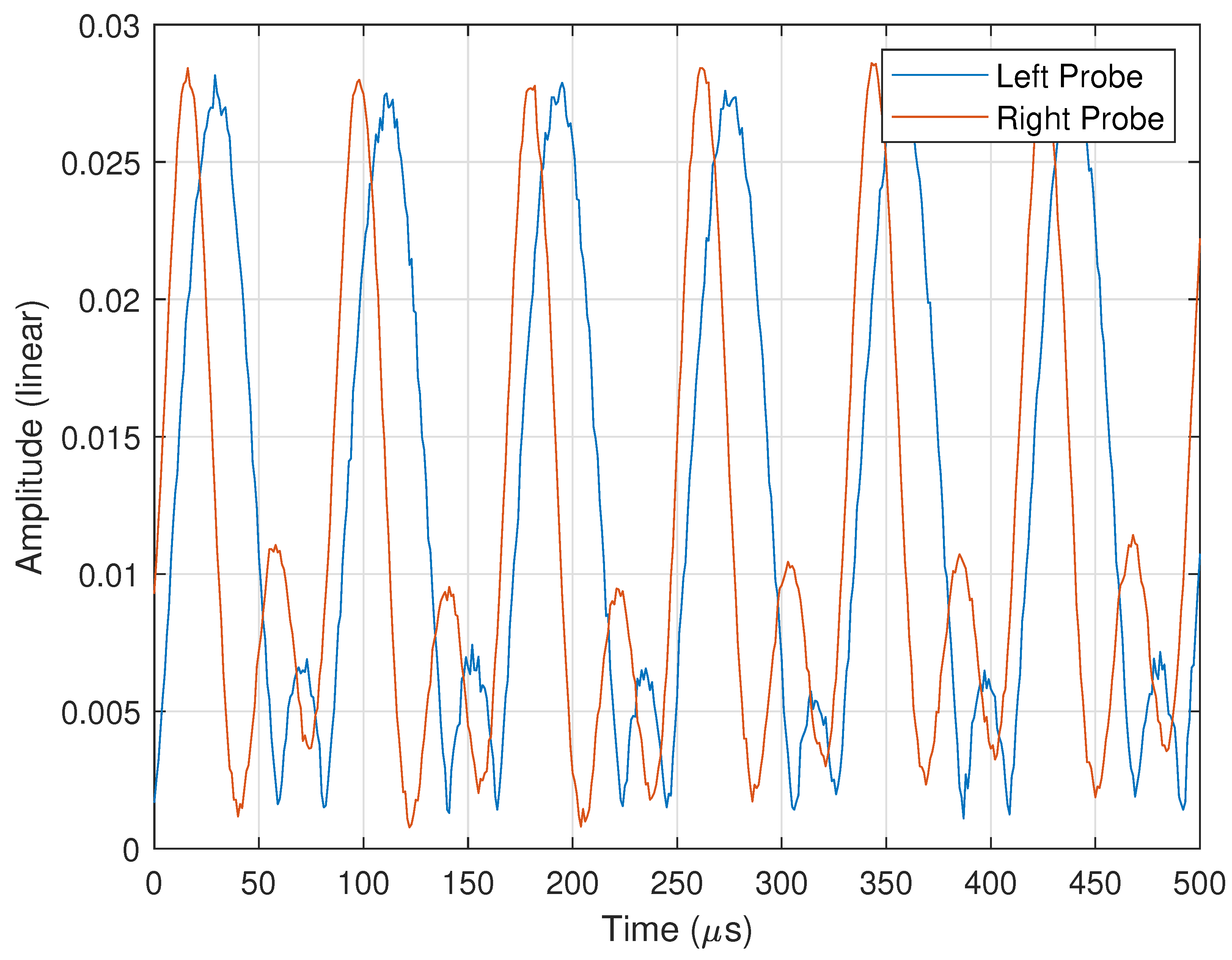
2.5. Temporal Periodicity of the Far-Field Pattern
2.5.1. RF Hardware Collection
2.5.2. Far-Field Probe Collection
2.6. Angular Scan with Time
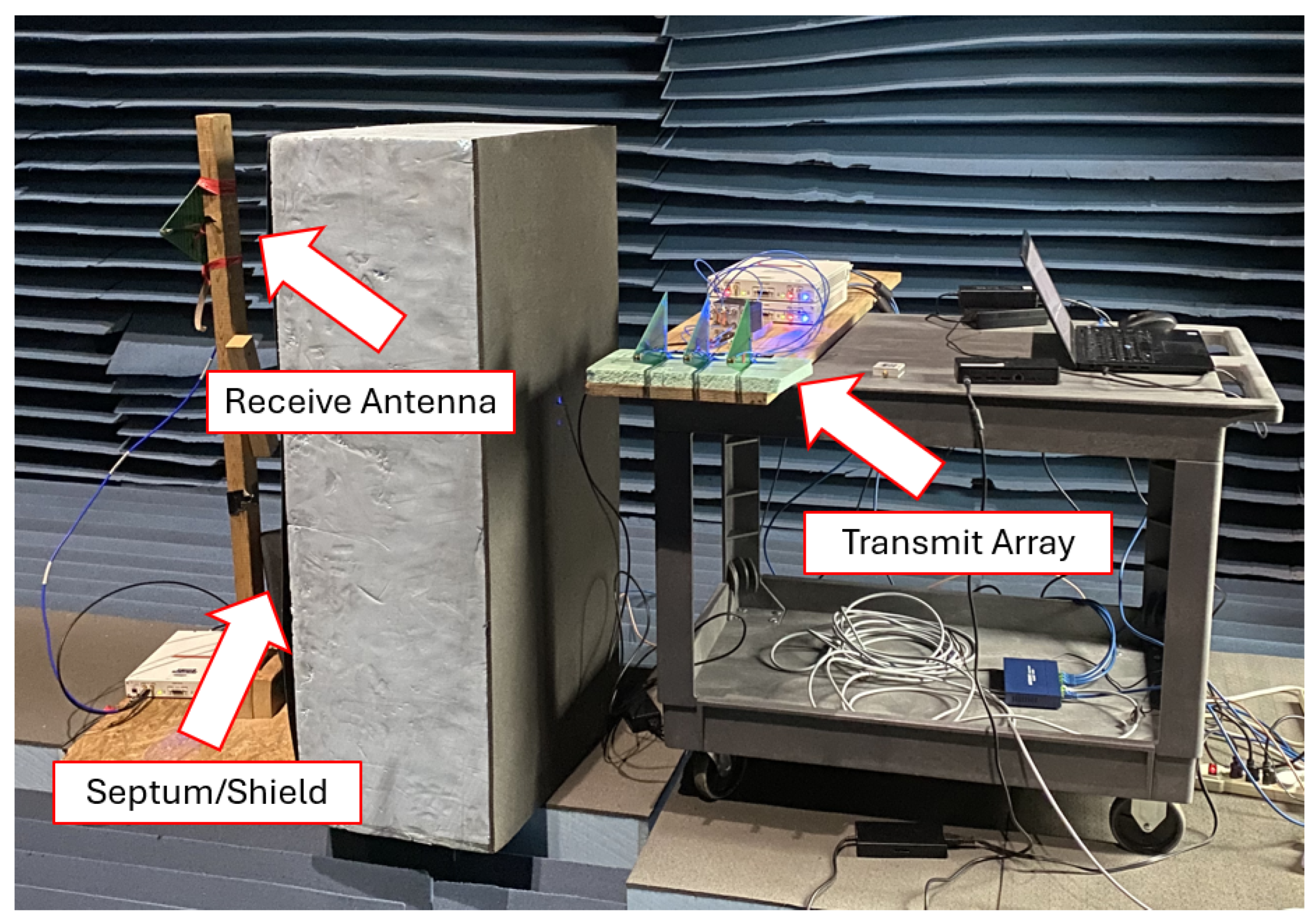
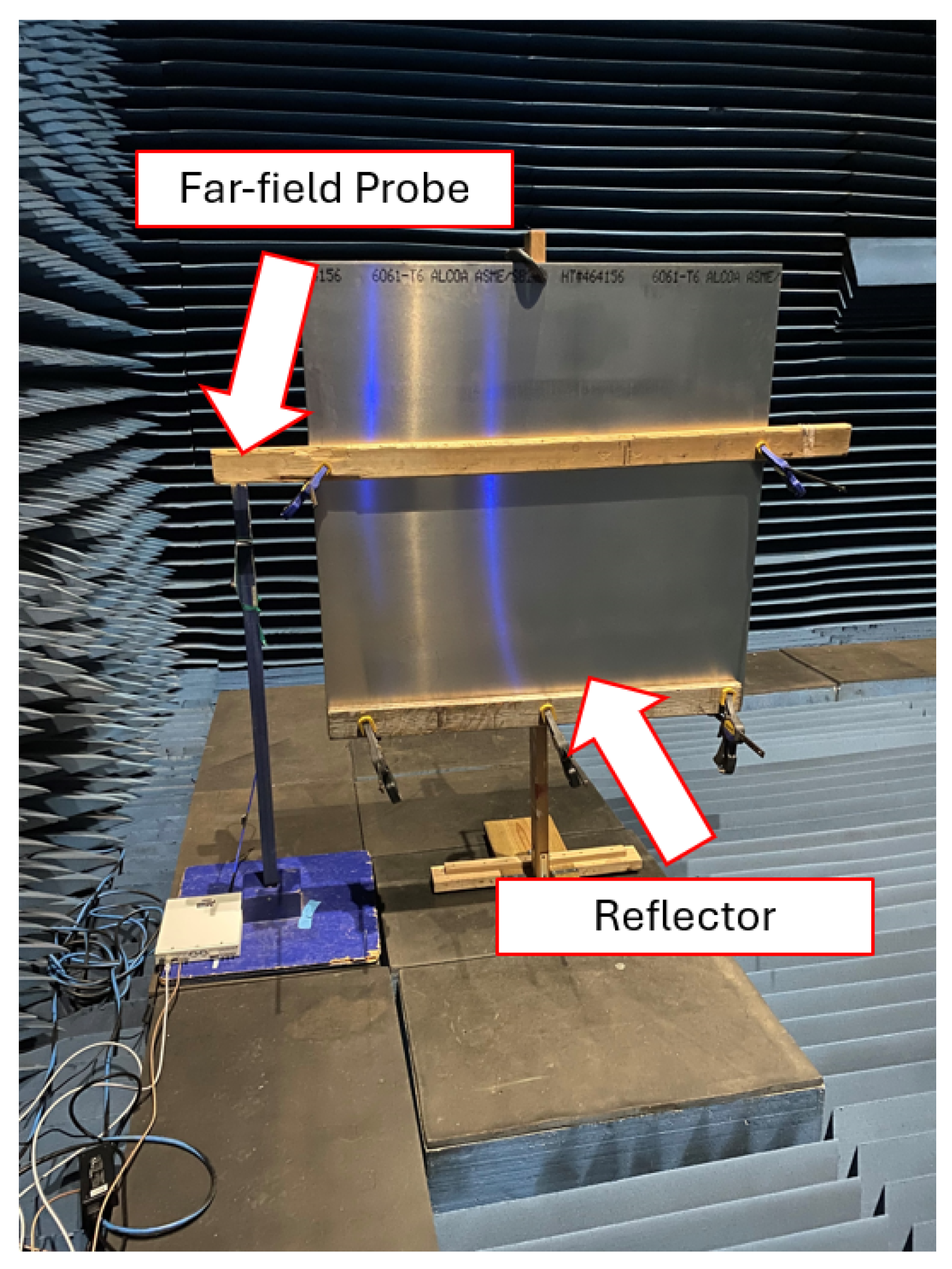
3. Data Collection II: Stationary Target Reflection
3.1. Signal Model at the Target
3.2. Signal Model at the Receiver
3.3. Matched Filter Threshold and Receive Antenna Shielding
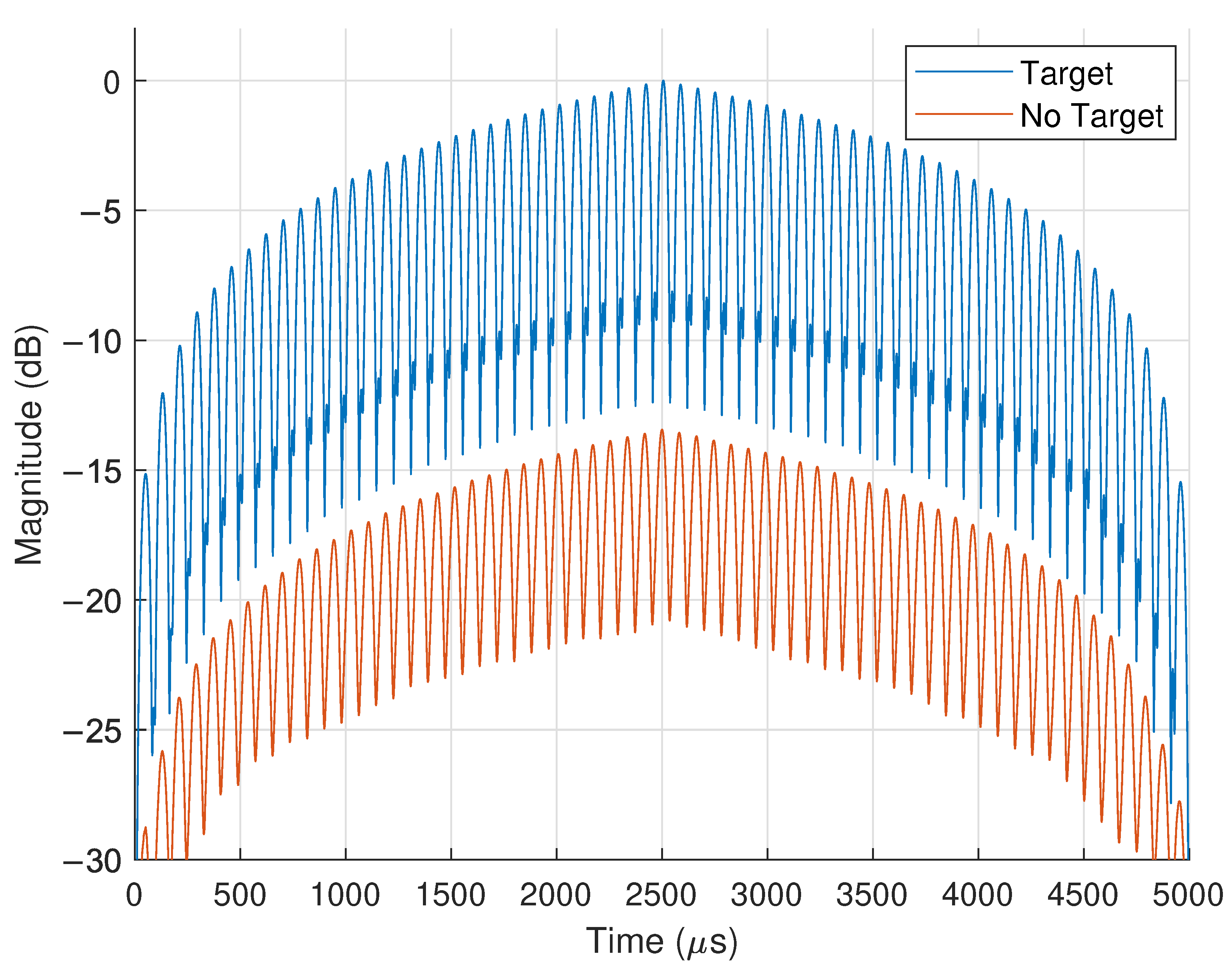
3.4. Target Detection Test Criteria
3.5. Binary Target Detection: Experimental Results
3.5.1. Target Echo
3.5.2. MF Response
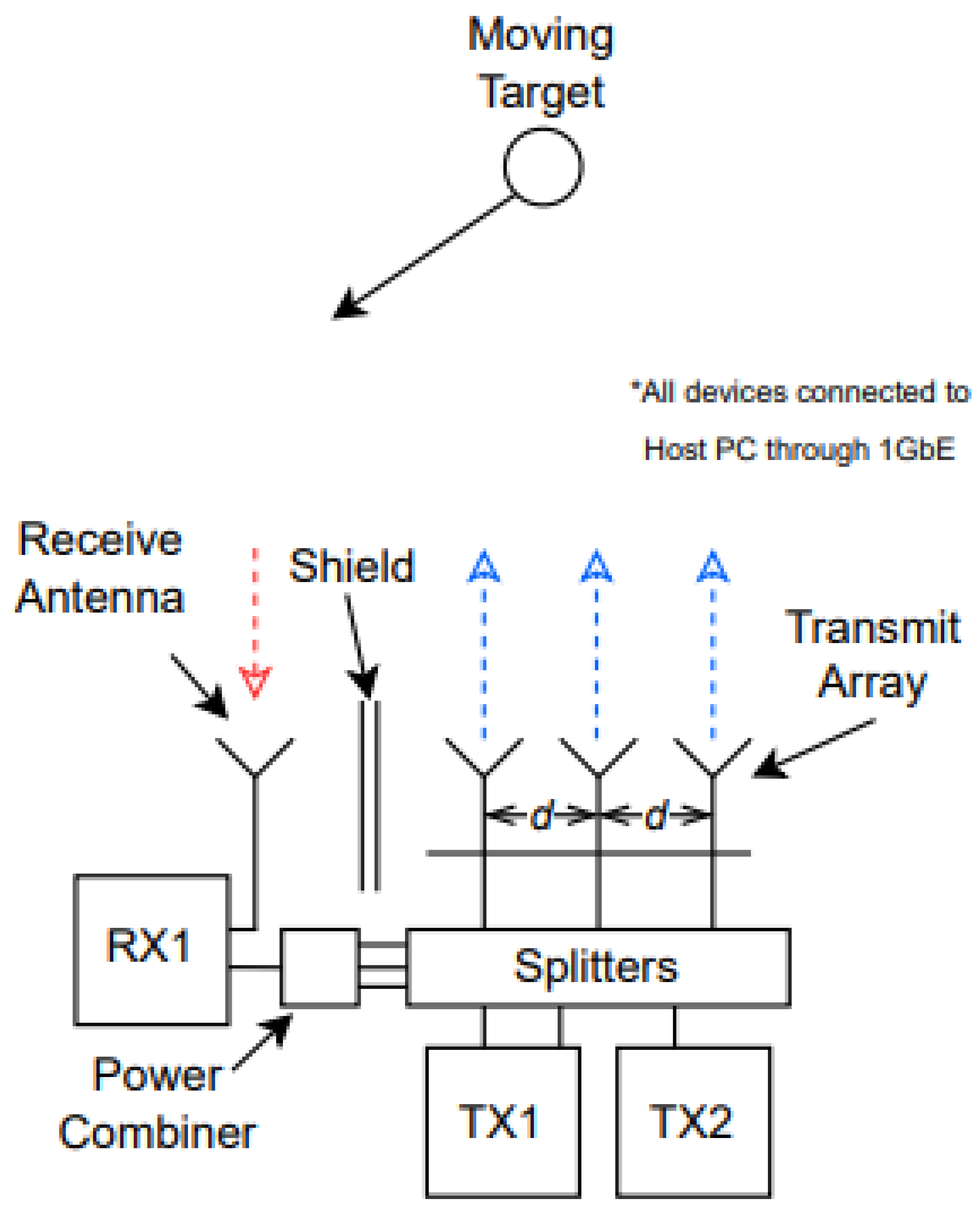
4. Data Collection III: Moving Targets
4.1. Theoretical Frequency Domain Response
4.2. Frequency Bin Resolution
4.3. Experimental Results
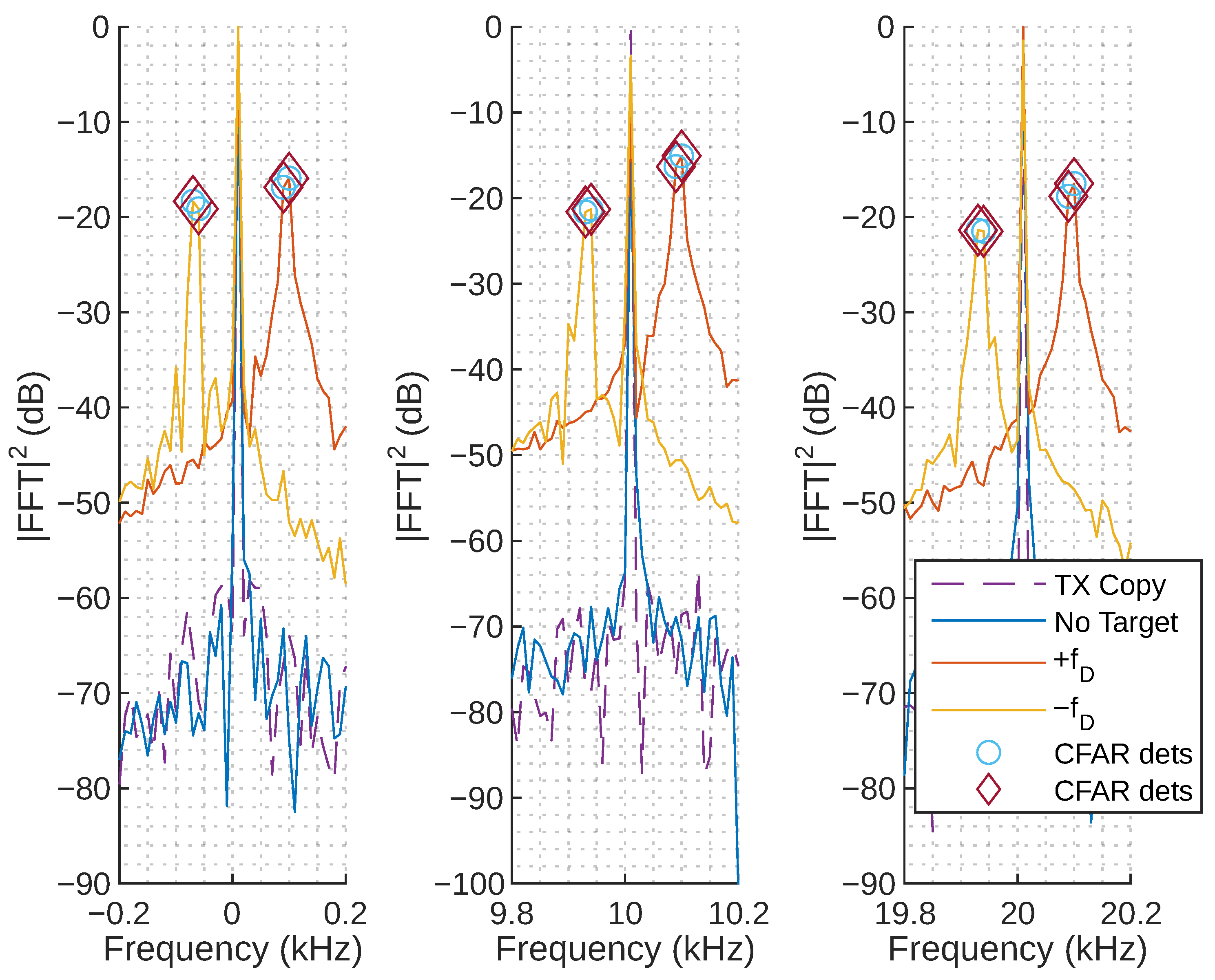
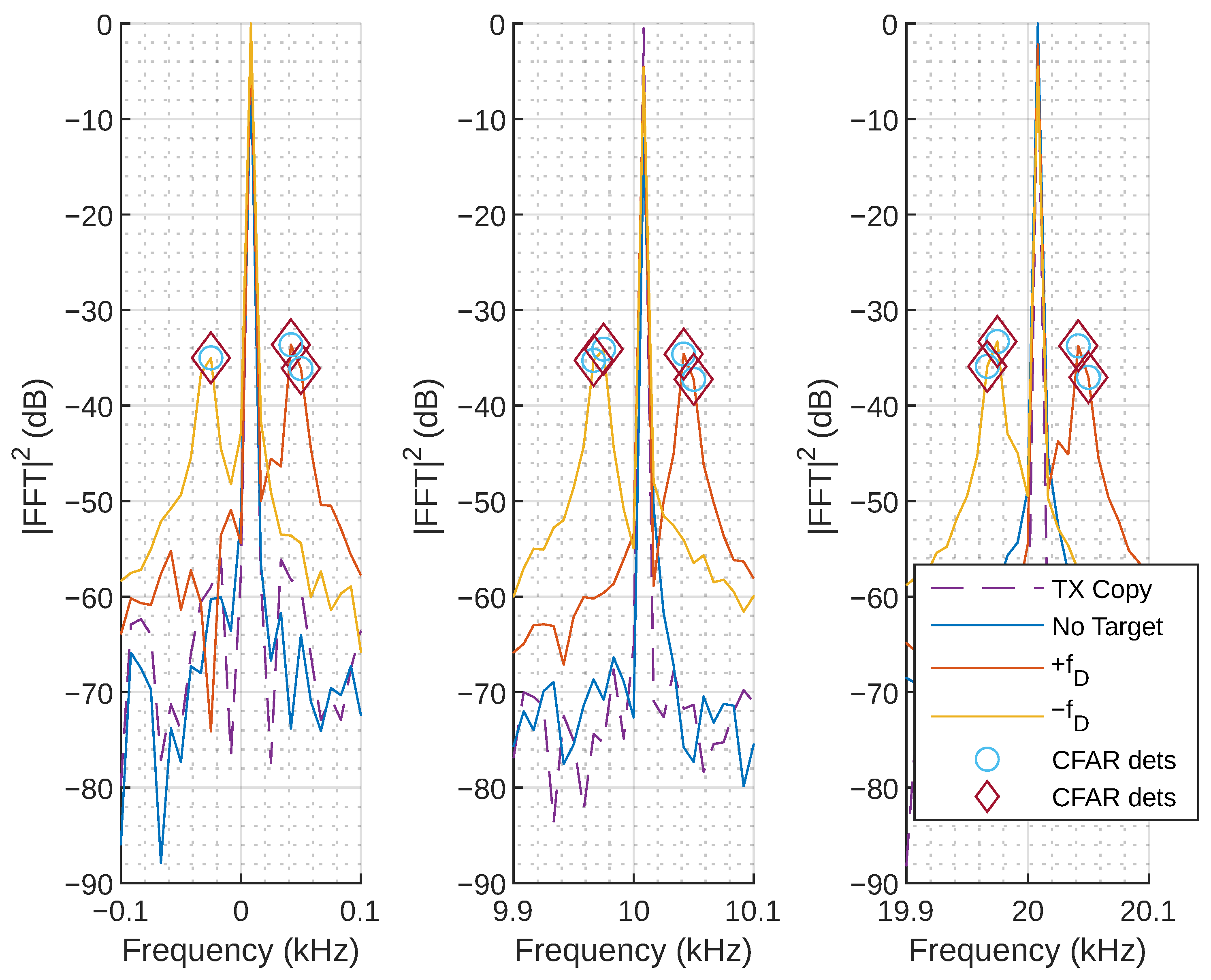
4.3.1. Frequency Domain Response
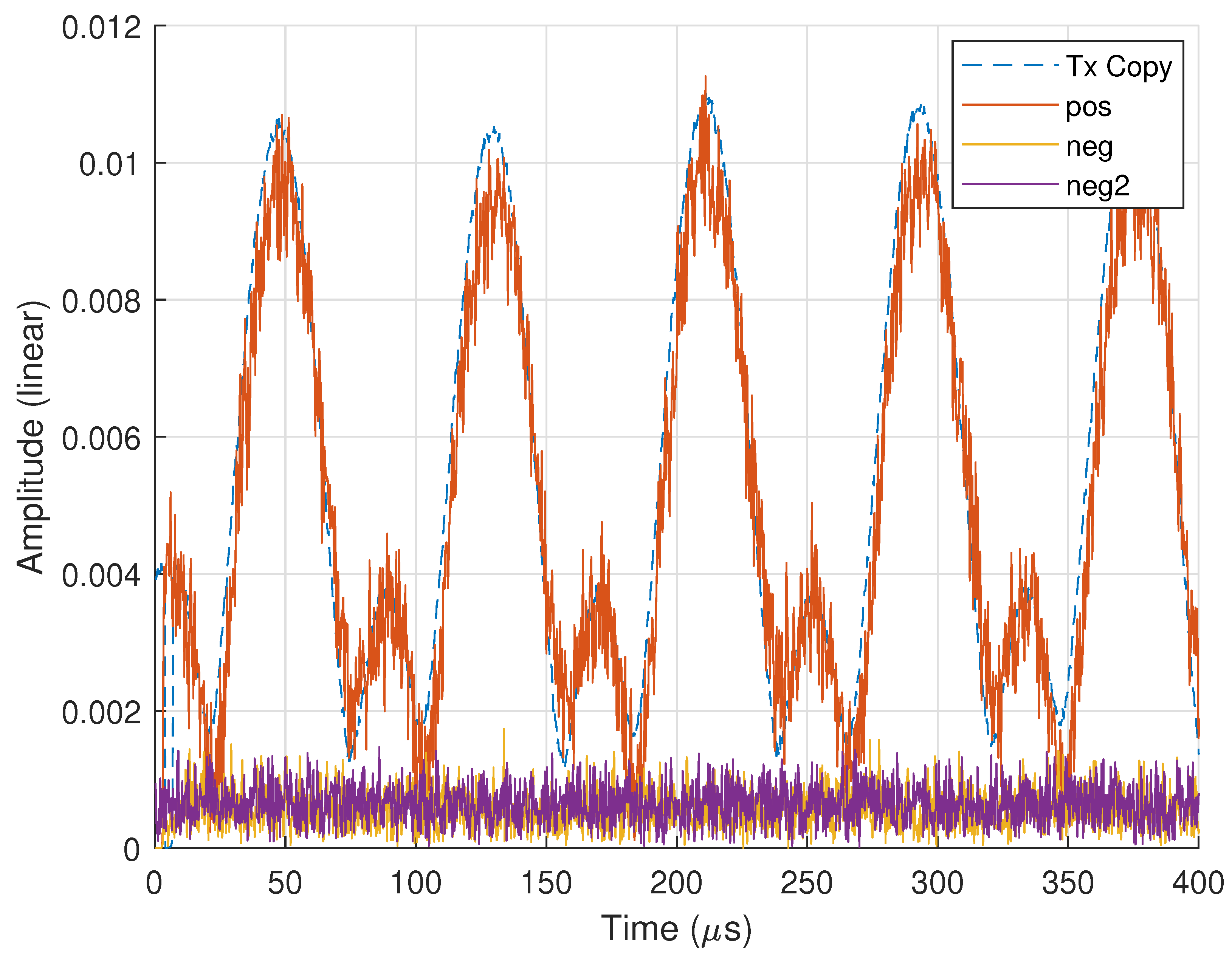
- TX Copy: FFT of the captured analog signal created using RF hardware.
- No Target: FFT of the captured experimental scene with no targets present.
- : FFT of the data captured from a target moving toward the radar.
- : FFT of data captured from a target moving away from the radar.
- CFAR dets: cell averaging (CA)-constant false alarm rate (CFAR) detections (see Section 4.3.3).
4.3.2. Radial Velocity
4.3.3. CA-CFAR Detection
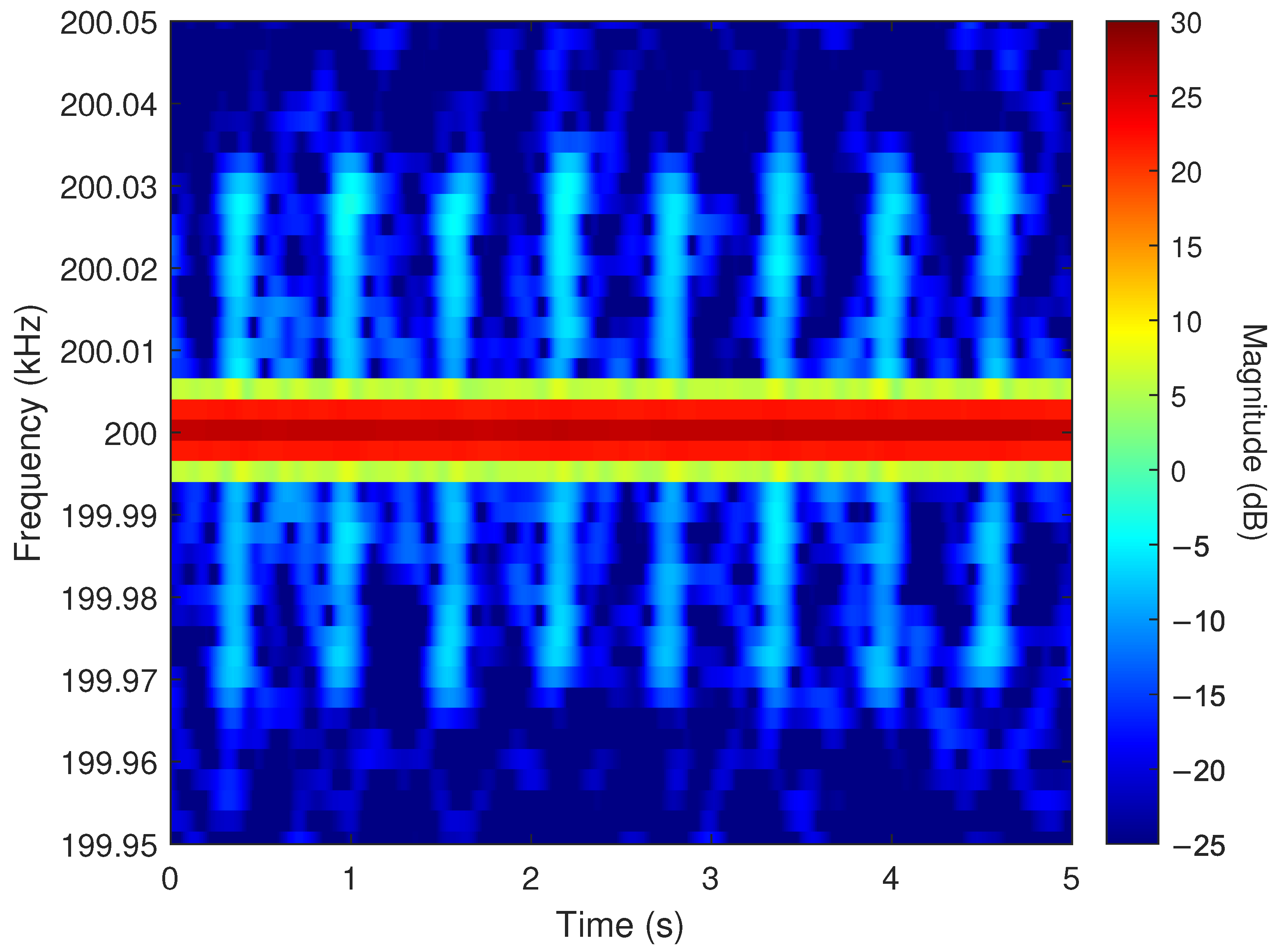
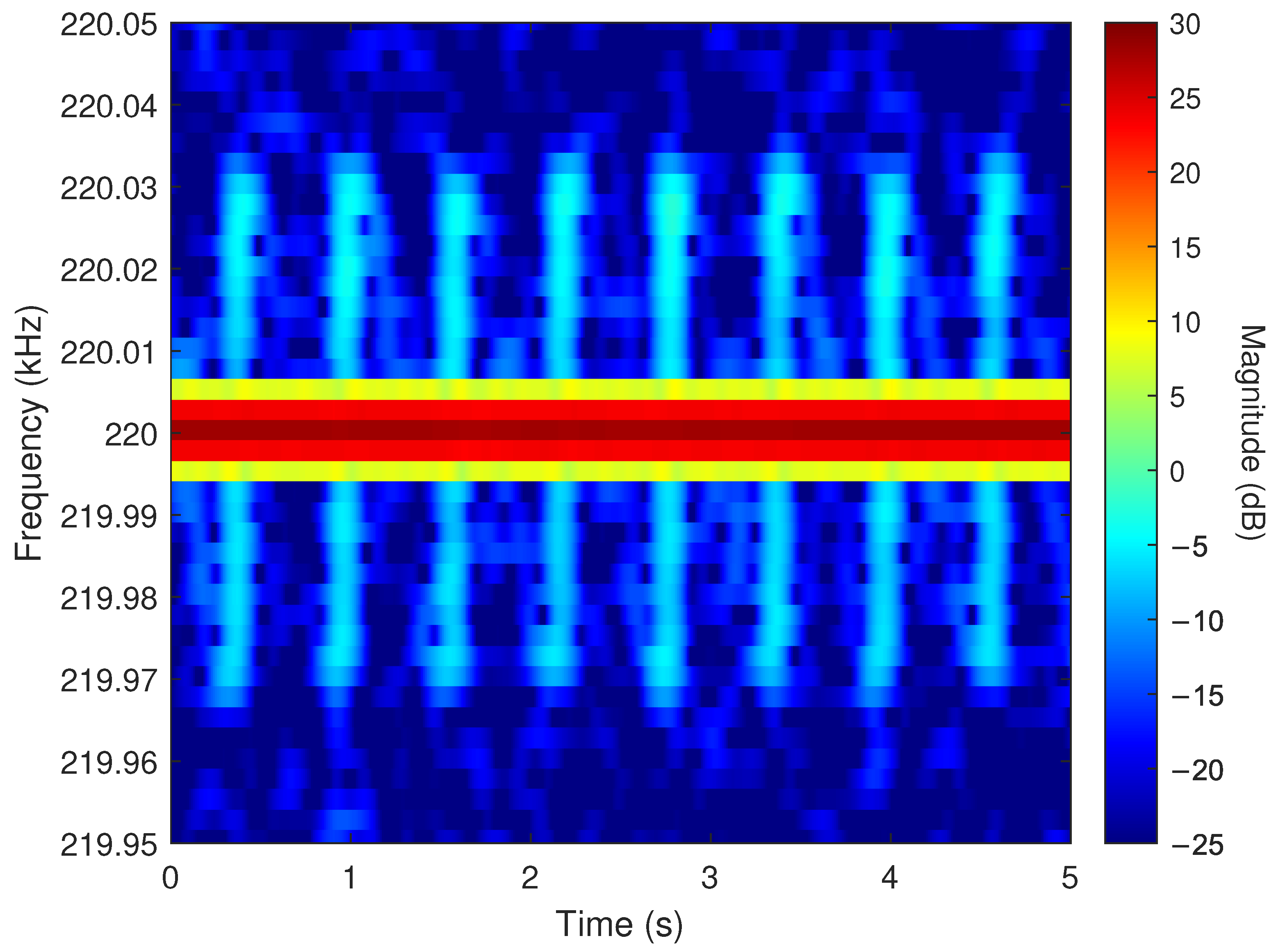
5. Data Collection IV: Micro-Doppler
5.1. Signal Model
5.2. Experimental Operating Parameters
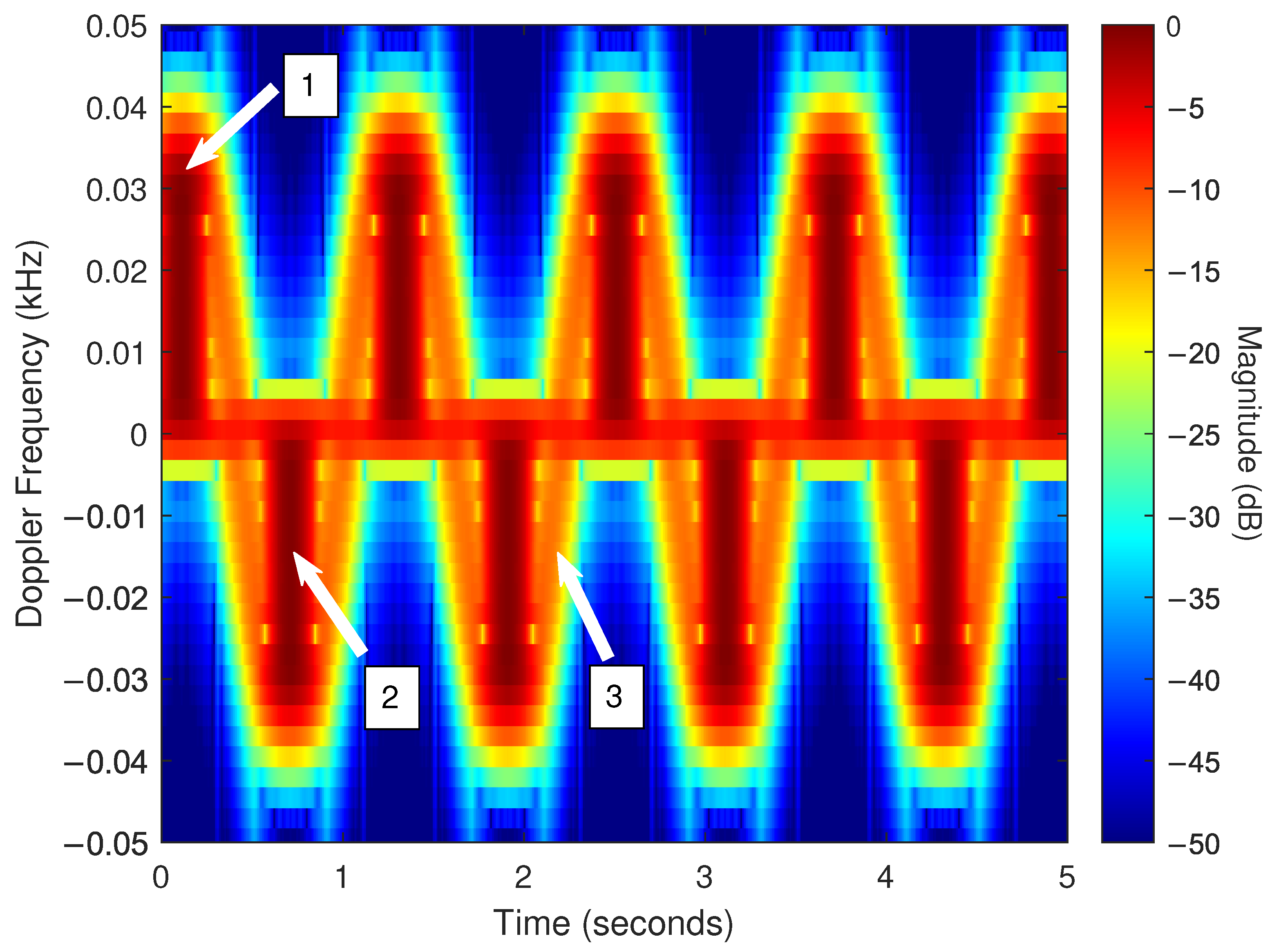
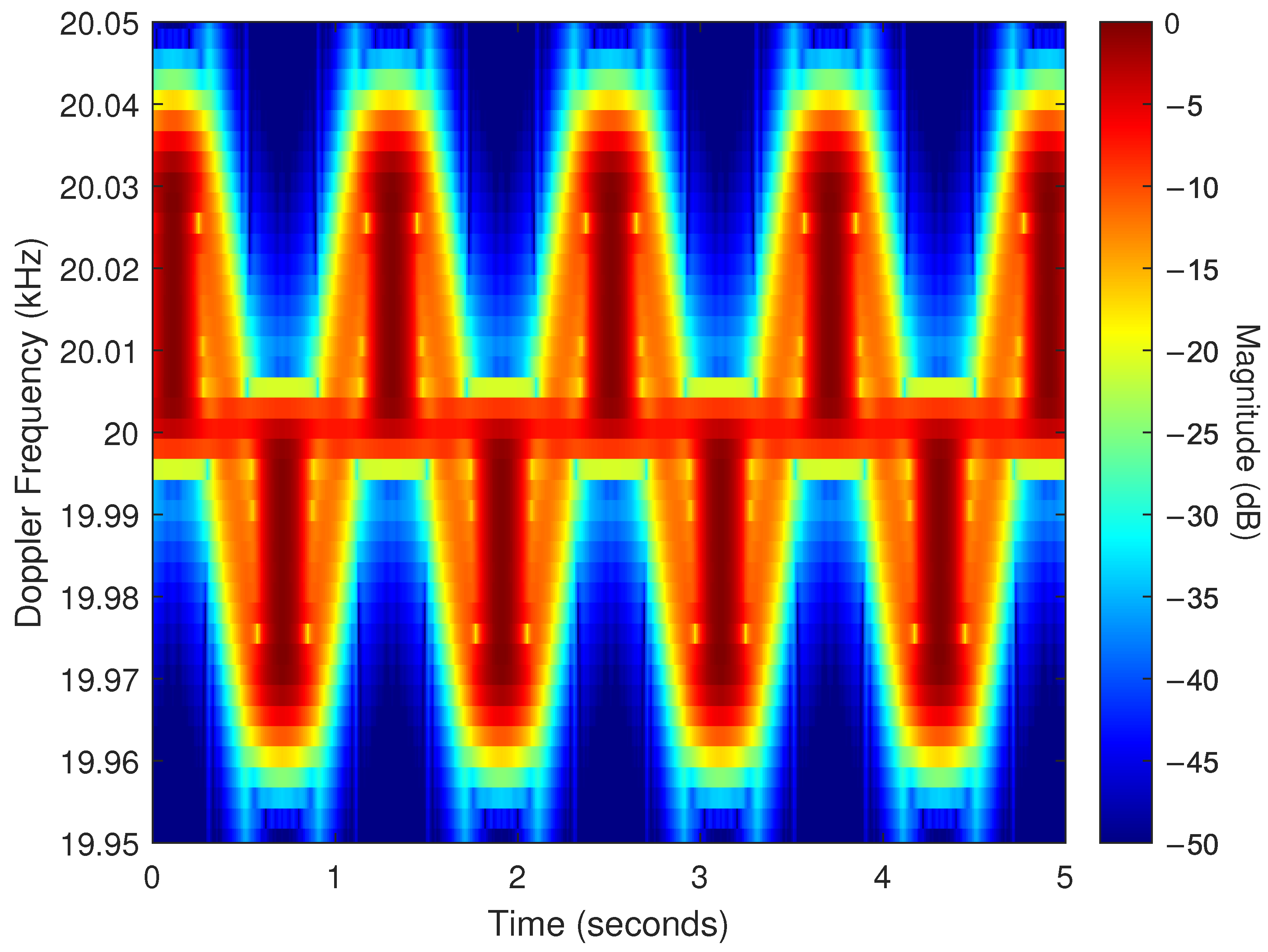
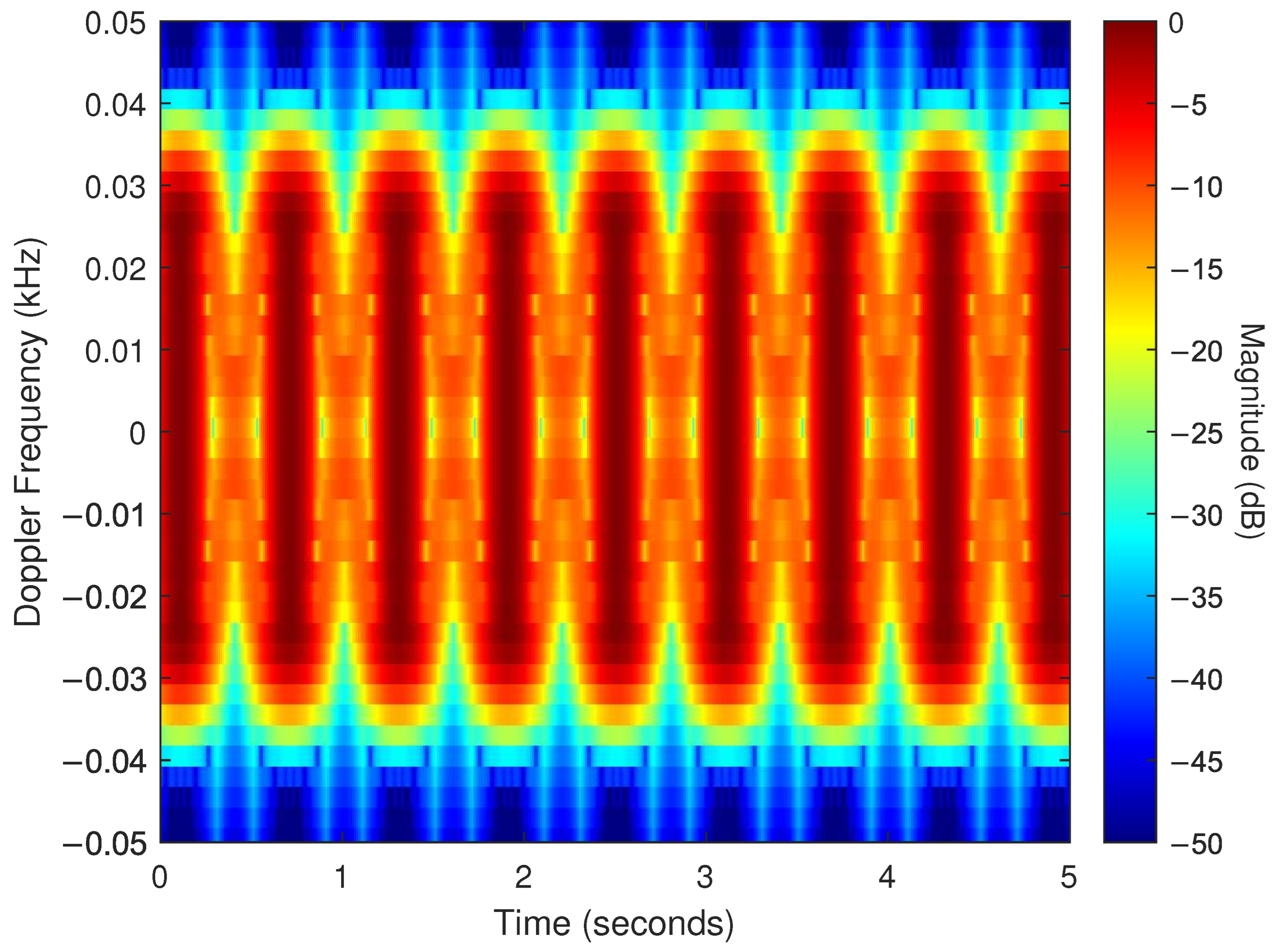
5.3. Time–Frequency Analysis of Simulated Reflections
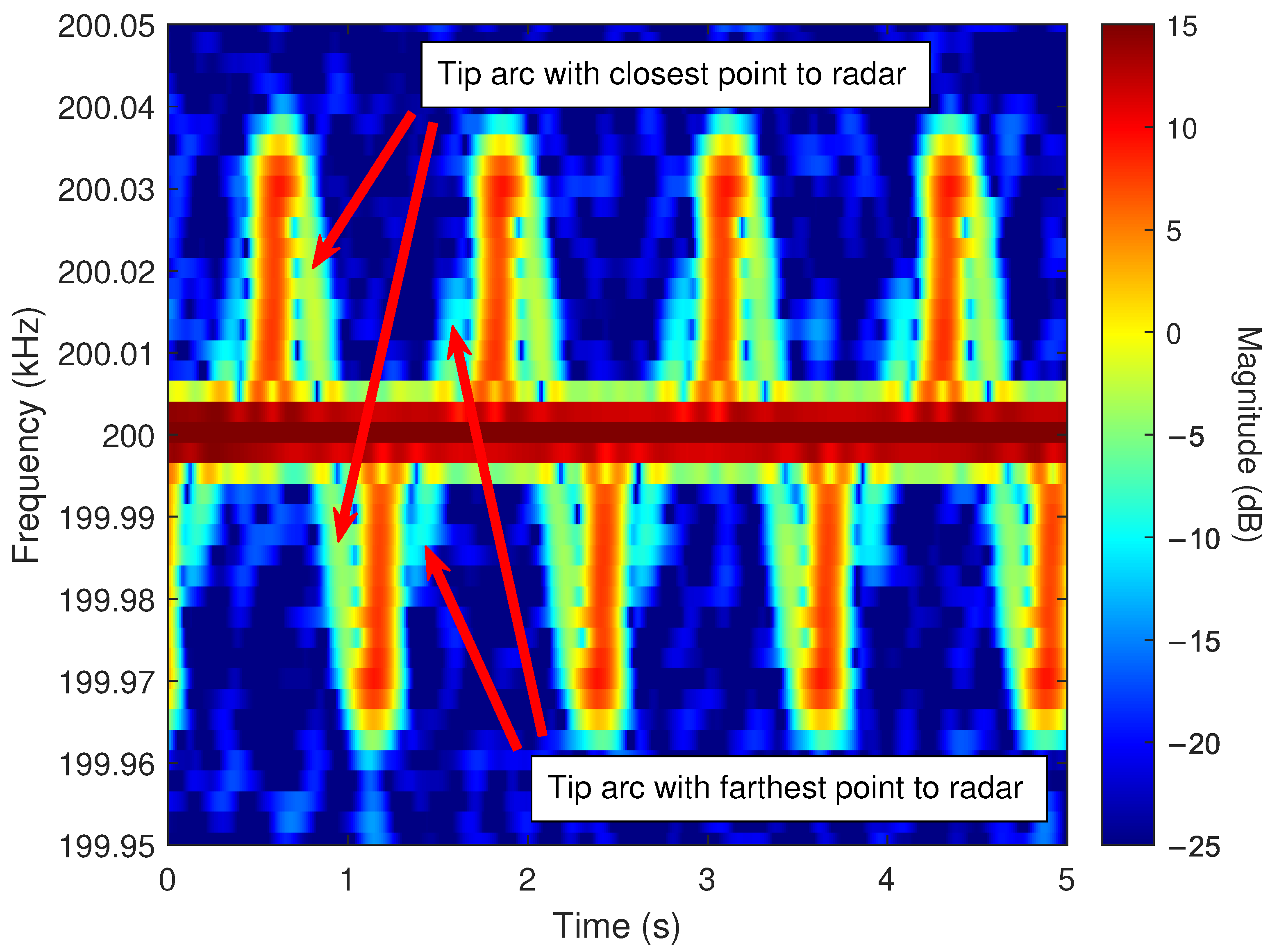
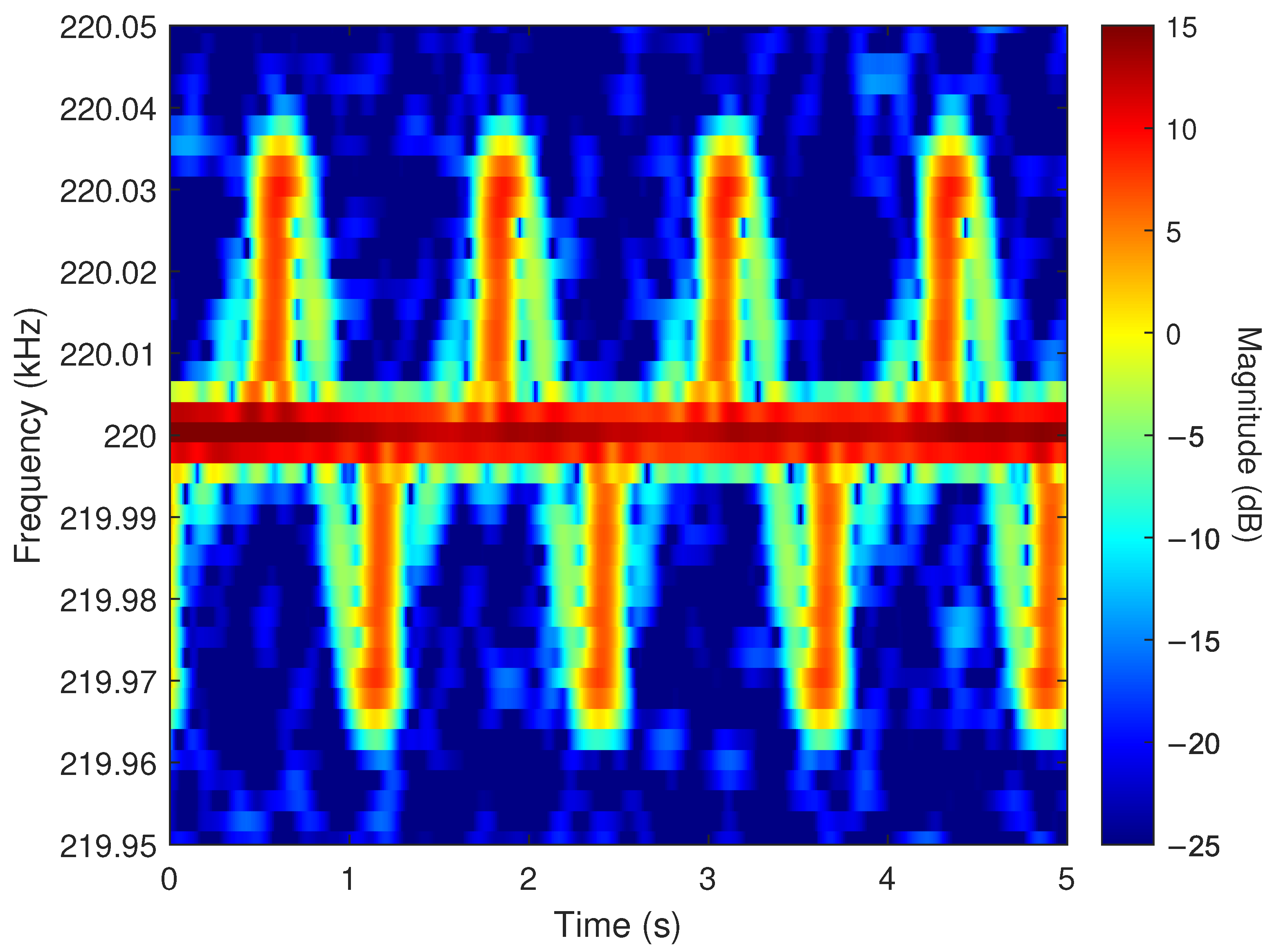
- Periodic blade flashes.
- Strong scattering from the blade tip during each periodic flash.
- A sinusoidal trace produced by the tip of the rotating blade.
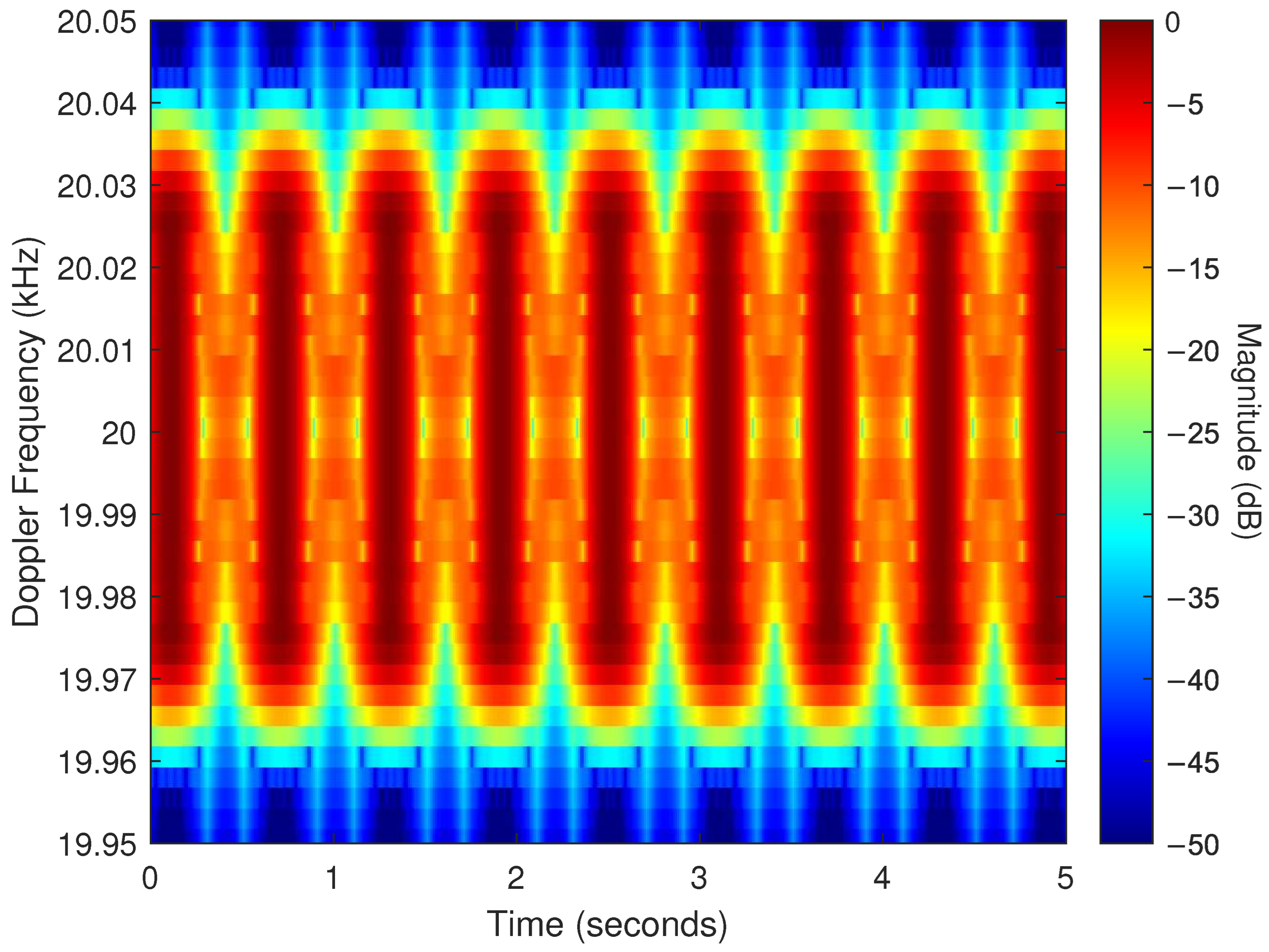
5.4. Experimental Results
Single-Blade Collection
5.5. Two-Blade Collection
5.6. Predicted Propeller Length
6. Concluding Remarks
- Two key attributes of far-field pattern: temporal periodicity and angular scanning behavior of the mainbeam.
- Basic radar capabilities through binary target detection tests in a controlled anechoic environment.
- Doppler shift from two moving targets: a car and a drone.
- Extraction of micro-Doppler features from rotating blades using the STFT as a tool for time–frequency analysis.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Antonik, P.; Wicks, M.; Griffiths, H.; Baker, C. Frequency Diverse Array Radars. In Proceedings of the 2006 IEEE Conference on Radar, Verona, NY, USA, 24–27 April 2006; pp. 215–217. [Google Scholar] [CrossRef]
- Antonik, P.; Wicks, M.C.; Griffiths, H.D.; Baker, C.J. Range dependent beamforming using element level waveform diversity. In Proceedings of the 2006 InternationalWaveform Diversity & Design Conference, Lihue, HI, USA, 22–27 January 2006; pp. 1–6. [Google Scholar] [CrossRef]
- Antonik, P.; Wicks, M.; Griffiths, H.; Baker, C. Multi-mission multi-mode waveform diversity. In Proceedings of the 2006 IEEE Conference on Radar, Verona, NY, USA, 24–27 April 2006; pp. 580–582. [Google Scholar] [CrossRef]
- Secmen, M.; Demir, S.; Hizal, A.; Eker, T. Frequency diverse array antenna with periodic time modulated pattern in range and angle. In Proceedings of the 2007 IEEE Radar Conference, Waltham, MA, USA, 17–20 April 2007; pp. 427–430. [Google Scholar] [CrossRef]
- Huang, J.; Tong, K.F.; Baker, C. Frequency diverse array with beam scanning feature. In Proceedings of the 2008 IEEE Antennas and Propagation Society International Symposium, San Diego, CA, USA, 5–11 July 2008; pp. 1–4. [Google Scholar] [CrossRef]
- Liu, Y.; Ruan, H.; Wang, L.; Nehorai, A. The random frequency diverse array: A new antenna structure for uncoupled direction-range indication in active sensing. IEEE J. Sel. Top. Signal Process. 2017, 11, 295–308. [Google Scholar] [CrossRef]
- Wang, W.Q. Subarray-based frequency diverse array radar for target range-angle estimation. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 3057–3067. [Google Scholar] [CrossRef]
- Wang, W.Q.; So, H.C. Transmit subaperturing for range and angle estimation in frequency diverse array radar. IEEE Trans. Signal Process. 2014, 62, 2000–2011. [Google Scholar] [CrossRef]
- Xu, Y.; Shi, X.; Xu, J.; Huang, L.; Li, W. Range–angle-decoupled beampattern synthesis with subarray-based frequency diverse array. Digit. Signal Process. 2017, 64, 49–59. [Google Scholar] [CrossRef]
- Correll, B.; Rigling, B. Quantized, power law frequency diverse arrays. In Proceedings of the 2023 IEEE Radar Conference (RadarConf23), San Antonio, TX, USA, 1–5 May 2023; pp. 1–6. [Google Scholar]
- Correll, B.; Rigling, B. Auto-scanning quantized, power law frequency diverse arrays. In Proceedings of the 2024 IEEE Radar Conference (RadarConf24), Denver, CO, USA, 6–10 May 2024. [Google Scholar]
- Khan, W.; Qureshi, I.M.; Saeed, S. Frequency diverse array radar with logarithmically increasing frequency offset. IEEE Antennas Wirel. Propag. Lett. 2015, 14, 499–502. [Google Scholar] [CrossRef]
- Gao, K.; Wang, W.Q.; Cai, J.; Xiong, J. Decoupled frequency diverse array range-angle-dependent beampattern synthesis using non-linearly increasing frequency offsets. IET Microwaves Antennas Propag. 2016, 10, 880–884. [Google Scholar] [CrossRef]
- Mahmood, M.; Mir, H. Frequency diverse array beamforming using nonuniform logarithmic frequency increments. IEEE Antennas Wirel. Propag. Lett. 2018, 17, 1817–1821. [Google Scholar] [CrossRef]
- Liao, Y.; Wang, W.Q.; Zheng, Z. Frequency diverse array beampattern synthesis using symmetrical logarithmic frequency offsets for target indication. IEEE Trans. Antennas Propag. 2019, 67, 3505–3509. [Google Scholar] [CrossRef]
- Shao, H.; Dai, J.; Xiong, J.; Chen, H.; Wang, W.Q. Dot-shaped range-angle beampattern synthesis for frequency diverse array. IEEE Antennas Wirel. Propag. Lett. 2016, 15, 1703–1706. [Google Scholar] [CrossRef]
- Xiong, J.; Wang, W.Q.; Shao, H.; Chen, H. Frequency diverse array transmit beampattern optimization with genetic algorithm. IEEE Antennas Wirel. Propag. Lett. 2016, 16, 469–472. [Google Scholar] [CrossRef]
- Geng, L.; Li, Y.; Dong, L.; Tan, Y.; Cheng, W. Efficiently Refining Beampattern in FDA-MIMO Radar via Alternating Manifold Optimization for Maximizing Signal-to-Interference-Noise Ratio. Remote Sens. 2024, 16, 1364. [Google Scholar] [CrossRef]
- Hsin, C.L.; Kiang, J.F. Frequency-Hopping Frequency-Diverse MIMO Radar for Target Detection and Localization Under False-Target Jamming. IEEE Access 2023, 11, 62121–62139. [Google Scholar] [CrossRef]
- Abdalla, A.; Abdalla, H.; Ramadan, M.; Mohamed, S.; Bin, T. Overview of frequency diverse array in radar ECCM applications. In Proceedings of the 2017 International Conference on Communication, Control, Computing and Electronics Engineering (ICCCCEE), Khartoum, Sudan, 16–18 January 2017; pp. 1–9. [Google Scholar] [CrossRef]
- Yao, A.M.; Anselmi, N.; Rocca, P. A multi-carrier frequency diverse array design method for wireless power transmission. In Proceedings of the 12th European Conference on Antennas and Propagation (EuCAP 2018), London, UK, 9–13 April 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Wang, W.Q. Retrodirective frequency diverse array focusing for wireless Information and power transfer. IEEE J. Sel. Areas Commun. 2019, 37, 61–73. [Google Scholar] [CrossRef]
- Fazzini, E.; Shanawani, M.; Costanzo, A.; Masotti, D. A logarithmic frequency-diverse array system for precise wireless power transfer. In Proceedings of the 2020 50th European Microwave Conference (EuMC), Utrecht, Netherlands, 12–14 January 2021; pp. 646–649. [Google Scholar]
- Antonik, P. An Investigation of a Frequency Diverse Array. PhD Thesis, UCL (University College London), London, UK, 2009. [Google Scholar]
- Brady, S.H. Frequency Diverse Array Radar: Signal Characterization and Measurement Accuracy. Masters Thesis, Air Force Institute of Technology, Dayton, OH, USA, 2012. [Google Scholar]
- Eker, T. A Conceptual Evaluation of Frequency Diverse Arrays and Novel Utilization of LFMCW. Ph.D. Thesis, Middle East Technical University, Ankara, Turkey, 2011. [Google Scholar]
- Çetintepe, C. Analysis of Frequency Diverse Arrays for Radar and Communication Applications. Ph.D. Thesis, Middle East Technical University, Ankara, Turkey, 2015. [Google Scholar]
- McCormick, P.M.; Jones, A.; Kellerman, N.; Mathieu, B.; Mertz, A. Experimental demonstration of a low-complexity multiple-input single-output frequency diverse array framework. In Proceedings of the 2023 IEEE Radar Conference (RadarConf23), Sydney, Australia, 6–10 November 2023; pp. 1–6. [Google Scholar]
- Kellerman, N. A MISO Frequency Diverse Array Implementation. Master’s Thesis, University of Kansas, Lawrence, KS, USA, 2023. [Google Scholar]
- Munson, N.R.; Correll, B.; Narayanan, R.M.; Bufler, T.D. Experimental Test of a Frequency Diverse Array Radar Target Detection System Using SDRs: Preliminary Results. In Proceedings of the 2024 IEEE Radar Conference (RadarConf24), Denver, CO, USA, 6–10 May 2024; pp. 1–6. [Google Scholar] [CrossRef]
- Munson, N.R.; Correll Jr, B.; Henry, J.K.; Narayanan, R.M.; Bufler, T.D. Design and Implementation of a Binary Phase-Shift Keying Frequency Diverse Array: Considerations and Challenges. Sensors 2025, 25, 193. [Google Scholar] [CrossRef] [PubMed]
- Huang, J.; Tong, K.F.; Baker, C. Frequency diverse array: Simulation and design. In Proceedings of the 2009 Loughborough Antennas & Propagation Conference, Loughborough, UK, 16–17 November 2009; pp. 253–256. [Google Scholar] [CrossRef]
- Huang, J. Frequency Diversity Array: Theory and Design. Ph.D. Thesis, UCL (University College London), London, UK, 2010. [Google Scholar]
- Lee, S.; Yoon, H.; Jang, B.j. Real-time direction-finding system using time-modulated array and USRP. In Proceedings of the 2017 Ninth International Conference on Ubiquitous and Future Networks (ICUFN), Milan, Italy, 4–7 July 2017; pp. 794–796. [Google Scholar]
- Rares, B.; Codau, C.; Pastrav, A.; Palade, T.; Hedesiu, H.; Balauta, B.; Puschita, E. Experimental evaluation of AoA algorithms using NI USRP software defined radios. In Proceedings of the 2018 17th RoEduNet Conference: Networking in Education and Research (RoEduNet), Cluj-Napoca, Romania, 6–8 September 2018; pp. 1–6. [Google Scholar]
- Abdessamad, W.; Nasser, Y.; Artail, H.; Chazbek, S.; Fakher, G.; Bazzi, O. An SDR platform using direction finding and statistical analysis for the detection of interferers. In Proceedings of the 2016 8th International Congress on Ultra Modern Telecommunications and Control Systems and Workshops (ICUMT), Lisbon, Portugal, 18–20 October 2016; pp. 43–48. [Google Scholar]
- Alawsh, S.A.; Al Khazragi, O.A.; Muqaibel, A.H.; Al-Ghadhban, S.N. Sparse direction of arrival estimation using sparse arrays based on software-defined-radio platform. In Proceedings of the 2017 10th International Conference on Electrical and Electronics Engineering (ELECO), Bursa, Turkey, 30 November–2 December 2017; pp. 671–675. [Google Scholar]
- Krueckemeier, M.; Schwartau, F.; Monka-Ewe, C.; Technische, J.S. Synchronization of multiple USRP SDRs for coherent receiver applications. In Proceedings of the 2019 Sixth International Conference on Software Defined Systems (SDS), Rome, Italy, 10–13 June 2019; pp. 11–16. [Google Scholar]
- Jokinen, M.; Sonkki, M.; Salonen, E. Phased antenna array implementation with USRP. In Proceedings of the 2017 IEEE Globecom Workshops (GC Wkshps), Singapore, 4–8 December 2017; pp. 1–5. [Google Scholar]
- Donelli, M.; Sacchi, C. Implementation of a low-cost reconfigurable antenna array for SDR-based communication systems. In Proceedings of the 2012 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2012; pp. 1–7. [Google Scholar]
- Diouf, C.; Janssen, G.J.; Dun, H.; Kazaz, T.; Tiberius, C.C. A USRP-based testbed for wideband ranging and positioning signal acquisition. IEEE Trans. Instrum. Meas. 2021, 70, 5501915. [Google Scholar] [CrossRef]
- Aziz, A.; Rajagopal, A.; Adithya, A. Utilization of Spectrum holes for image transmission using LabVIEW on NI USRP. In Proceedings of the 2018 International Conference on Networking, Embedded and Wireless Systems (ICNEWS), Bangalore, India, 27–28 December 2018; pp. 1–4. [Google Scholar]
- Tichy, M.; Ulovec, K. OFDM system implementation using a USRP unit for testing purposes. In Proceedings of the Proceedings of 22nd International Conference Radioelektronika 2012, Brno, Czech Republic, 17–18 April 2012; pp. 1–4. [Google Scholar]
- Stasiak, K.; Samczynski, P. FMCW radar implemented in SDR architecture using a USRP device. In Proceedings of the 2017 Signal Processing Symposium (SPSympo), Jachranka, Poland, 12–14 September 2017; pp. 1–5. [Google Scholar]
- Shevchenko, A.; Samokvit, V.; Piskunov, S. The Far-Field Threshold Evaluation of the Frequency Diversity Arrays. In Proceedings of the 2020 IEEE Ukrainian Microwave Week (UkrMW), Kharkiv, Ukraine, 21–25 September 2020; pp. 31–34. [Google Scholar] [CrossRef]
- Balanis, C.A. Antenna Theory: Analysis and Design; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Levanon, N.; Mozeson, E. Radar Signals; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- EttusResearch. Experiments with the UBX Daughterboard in the HF Band. Available online: https://kb.ettus.com/Experiments_with_the_UBX_Daughterboard_in_the_HF_Band (accessed on 1 February 2024.).
- Bang, H.; Yan, Y.; Basit, A.; Wang, W.Q.; Cheng, J. Radar Cross Section Characterization of Frequency Diverse Array Radar. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 460–471. [Google Scholar] [CrossRef]
- Lathi, B.P.; Green, R.A. Linear Systems and Signals; Oxford University Press New York: New York, NY, USA, 2005; Volume 2. [Google Scholar]
- Richards, M.A.; Scheer, J.A.; Holm, W.A. Principles of Modern Radar; SciTech Publishing: Raleigh, NC, USA, 2004. [Google Scholar]
- R. Melino, C.B.; Tran, H. Modelling Helicopter Radar Backscatter; Technical Report 2547; Electronic Warfare and Radar Division—Defence Science and Technology Organisation: Edinburgh, Australia, 2011. [Google Scholar]
- Chen, V.C.; Ling, H. Time-Frequency Transforms for Radar Imaging and Signal Analysis; Artech House: Washington, DC, USA, 2002. [Google Scholar]
- Martin, J.; Mulgrew, B. Analysis of the theoretical radar return signal form aircraft propeller blades. In Proceedings of the IEEE International Conference on Radar, Arlington, VA, USA, 7–10 May 1990; pp. 569–572. [Google Scholar] [CrossRef]
- Cohen, L. Time-Frequency Analysis; Prentice Hall PTR New Jersey: Hoboken, NJ, USA, 1995; Volume 778. [Google Scholar]
- Cohen, L. Time-frequency distributions-a review. Proc. IEEE 1989, 77, 941–981. [Google Scholar] [CrossRef]
- Gannon, Z.; Tahmoush, D. Measuring UAV propeller length using micro-Doppler signatures. In Proceedings of the 2020 IEEE International Radar Conference (RADAR), Florence, Italy, 21–25 September 2020; pp. 1019–1022. [Google Scholar]
- Liao, T.; Wang, W.Q.; Huang, B. Manifold sensitivity analysis of frequency diverse array. IEEE Signal Process. Lett. 2020, 27, 1020–1024. [Google Scholar] [CrossRef]
- Gao, K.; Chen, H.; Shao, H.; Cai, J.; Wang, W.Q. Impacts of frequency increment errors on frequency diverse array beampattern. EURASIP J. Adv. Signal Process. 2015, 2015, 34. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Label | Description |
|---|---|
| Collection I | Far-field Beampattern |
| Collection II | Stationary Target Reflection |
| Collection III | Moving Target Reflection |
| Collection IV | micro-Doppler Signature |
| Component | Manufacturer/Part # | Collection |
|---|---|---|
| Log-Periodic Tx Antenna | WASVJB 0.85–6.5 GHz | I, II, III |
| Log-Periodic Rx Antenna | Walfront 0.6–6.0 GHz | I, II, III |
| Log-Periodic Tx Antenna | WASVJB 2.1–11 GHz | IV |
| Log-Periodic Rx Antenna | WASVJB 2.1–11 GHz | IV |
| 2-way Power Splitter | Minicircuits ZAPD-30-S+ | I, II, III |
| 4-way Power Combiner | Minicircuits ZN4PD1-50-S+ | I, II, III |
| Collection | N | ||
|---|---|---|---|
| I | 2 | 3 | 0.2998 |
| II | 2 | 3 | 0.2998 |
| III | 2 | 3 | 0.2998 |
| IV | 5.9 | 2 | 0.0254 |
| (kHz) | Measured () | Theoretical () |
|---|---|---|
| 10 | 99.33 | 100.00 |
| 12 | 83.62 | 83.33 |
| 20 | 49.89 | 50.00 |
| 50 | 20.04 | 20.00 |
| 100 | 9.95 | 10.00 |
| 250 | 4.04 | 4.00 |
| 500 | 2.00 | 2.00 |
| Test | Radial Motion | m/s | |
|---|---|---|---|
| Car | 6.37 | 6.71 | |
| Car | 5.62 | 6.26 | |
| Drone | 2.81 | 3.13 | |
| Drone | 2.81 | 3.13 |
| (# of Blades) | (m) | (rad/s) | (m) | (Hz) | (Hz) | (m) |
|---|---|---|---|---|---|---|
| 1 | 0.0508 | 5.24 | 0.165 | 34 | 36 | 0.175 |
| 2 | 0.0508 | 5.24 | 0.145 | 29.8 | 32 | 0.155 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Munson, N.R.; Correll, B., Jr.; Narayanan, R.M.; Bufler, T.D. Experimental Test of Continuous Wave Frequency Diverse Array Doppler Radar. Appl. Sci. 2025, 15, 7337. https://doi.org/10.3390/app15137337
Munson NR, Correll B Jr., Narayanan RM, Bufler TD. Experimental Test of Continuous Wave Frequency Diverse Array Doppler Radar. Applied Sciences. 2025; 15(13):7337. https://doi.org/10.3390/app15137337
Chicago/Turabian StyleMunson, Nicholas R., Bill Correll, Jr., Ram M. Narayanan, and Travis D. Bufler. 2025. "Experimental Test of Continuous Wave Frequency Diverse Array Doppler Radar" Applied Sciences 15, no. 13: 7337. https://doi.org/10.3390/app15137337
APA StyleMunson, N. R., Correll, B., Jr., Narayanan, R. M., & Bufler, T. D. (2025). Experimental Test of Continuous Wave Frequency Diverse Array Doppler Radar. Applied Sciences, 15(13), 7337. https://doi.org/10.3390/app15137337