Optimization is an engineering challenge based on identifying the set of parameters
that minimize an objective function
while ensuring the constraints of the physical phenomenon (inequality
and equality
constraints). Each parameter
can vary in a range defined between a lower bound
and an upper bound
in accordance with the parameter constraints. Therefore, an optimization problem is generally expressed with the mathematical formulation shown in Equation (
1). The subscript
i denotes the
i-th parameter,
j is used to indicate the
j-th inequality constraint and
k for the
k-th equality constraint. The bold symbol
denotes a parameter set, being a vector.
The aim of this work is the introduction of a novel battery parameter estimation approach based on a multi-objective function that also integrates the reversible mechanical deformation of the battery during its operating conditions. To achieve this goal, it is necessary to develop an appropriate model that accurately describes the battery behavior and properly asses the optimization problem defining objective functions, parameters, and constraints as deeply described in this work. Optimization is performed using the BOBYQA algorithm [
21], which is especially useful when the first derivative of the objective function is not available and each simulation is computationally expensive, requiring an efficient optimization strategy. A more detailed overview of the electrochemical–mechanical model and the optimization algorithm is provided in the following sections.
2.2. Mechanical Deformation
The electrodes of lithium-ion batteries are composed of porous composite structures that include active material particles, conductive additives, and a polymeric binder. The active material serves as a host for lithium ions, which are reversibly inserted and extracted during charge and discharge. These processes are called intercalation and deintercalation, respectively. As lithium ions intercalate into or deintercalate from the host structure, they cause lattice configuration changes, leading to microscopic volume expansion or contraction.
The lattice structure strain can be characterized through XRD techniques by measuring the variation of the lattice parameters as a function of the corresponding state of lithiation of the electrode. The state of lithiation is the ratio between the actual and the maximum amount of lithium concentration that can be hosted from the active material (
y is the cathode state of lithiation, while
x is the anode one, as reported in Equation (
2)).
The maximum lithium concentration depends on the lithiated active material crystal’s density
and molar mass
, as shown in Equation (
3) [
24].
During lithiation, active materials exhibit phase transitions from their delithiated configuration to the fully lithiated one. LFP undergoes a single phase transition from FePO
4 to LiFePO
4. In contrast, graphite (C
6) manifests multiple phase transitions before reaching its fully lithiated stage LiC
6 [
16,
25]. In addition, graphite’s stage transition is not symmetric during its lithiation–delithiation cycle. This is mainly due to the presence of stage IIL during lithium extraction. In fact, this stage is only present at low discharge current rates and gradually fades, increasing the discharge current. Therefore, there is a lithiation window where stages II, IIL, and III coexist; lower discharge rates increase the stage IIL volume fraction and smooth the volume change from stage II to III due to the lower density of stage IIL. Using the XRD measurement of LFP [
26] and graphite [
25,
27], the crystal volume changes as function of the state of lithiation are shown in
Figure 1.
The lattice parameters exhibit directional dependence in their deformation due to the intrinsic anisotropy of the lattice structure. However, this anisotropic nature is mitigated by the random orientation of the crystals within the particle. Thus, considering the volumetric strain, the active material particle deforms consistently with its crystal lattice.
Then, at the upper scale, the electrode volume change
depends on the
particles’ volumetric deformation
and on a possible reduction in porosity accounted for through a volumetric expansion parameter
[
28], as shown in Equation (
4). In addition, the volume of the
particles constitutes the overall active material volume, leading to Equation (
5).
Therefore, the volumetric strain of the electrode is obtained by dividing the Equation (
4) by the initial volume of the single particle
and accounting for Equation (
5), as reported in Equation (
6). Since the battery is assumed to be free to expand, the reduction in porosity is considered negligible, adopting the assumption of
[
16].
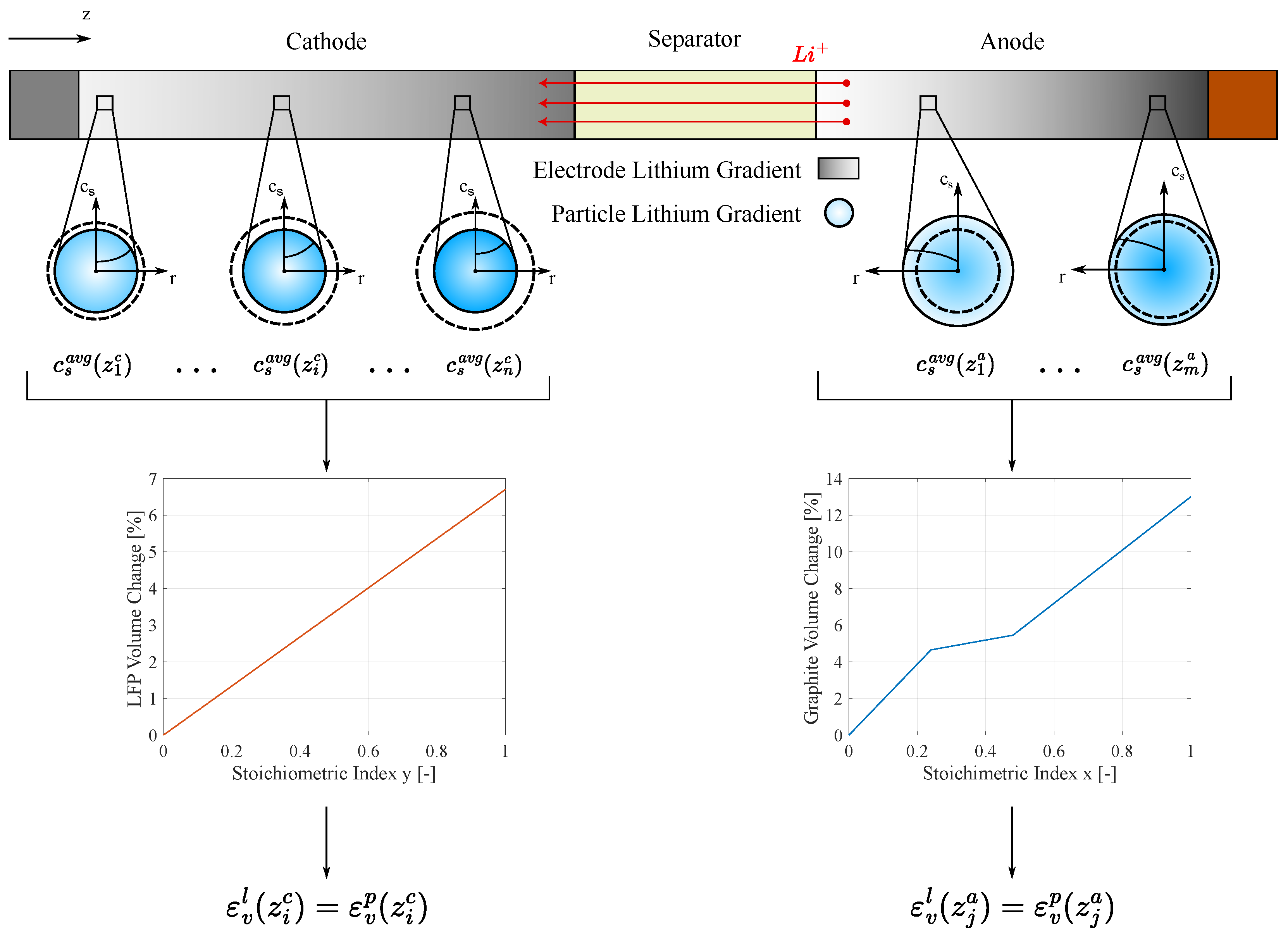
The previous equations hold under the assumption that all
particles deform uniformly. However, this is not entirely accurate due to lithium diffusion across the electrode thickness. In reality, during battery operation, the lithiated electrode has more lithium content near the separator, while the delithiated electrode has a higher lithium concentration near the current collector. In fact, the diffusion of lithium ions is less constrained in the separator area (
Figure 2).
Equation (
6) remains valid if
represents the average deformation of the particles across the electrode thickness. To achieve this, the P2D model is used to extract the lithium concentration
at different positions in this direction. The concentration is then averaged over the particle radius (
) to determine the crystal lattice strain of the material, and consequently the particle strain
, as shown in
Figure 2. Finally, the particle strain is averaged across the electrode thickness to obtain the overall mean particle deformation
.
The volumetric strain propagates across the battery scales, resulting in a macroscopic thickness change that is evaluated by accounting for the deformation of both the electrodes and the presence of
N layers [
29,
30]. Due to the thinness of the electrode with respect to in-plane geometry, the volumetric strain of the electrode is assumed to be responsible for just the out-of-plane strain (
) [
16], resulting in the overall battery thickness change modeled as presented in Equation (
7).
2.3. Objective Function
Once the electrochemical–mechanical behavior of the battery is modeled, the objective function for the parameter estimation can be set. Least-Square Objective Function (LSOF) was used to measure and minimize the difference between observed data points and the model’s predicted values. This approach is very useful for curve fitting since it evaluates the sum of squared errors computed over all data points, preventing positive and negative errors from canceling out and ensuring that larger deviations are penalized more heavily, improving convergence.
In a time-dependent curve fitting, considering
the generic variable at the
i-th time step, the
is computed, as presented in Equation (
8).
A multi-objective function approach is needed to evaluate the integration of the battery deformation in parameter estimation. Therefore, two LSOFs need to be computed in order to account for both the electrochemical measurements of the voltage profile and the mechanical measurements of the battery deformation.
Due to the different scales of the electrochemical objective function
and the mechanical one
, Equations (
9) and (
10) have been normalized with respect to the square of the minimum voltage and maximum deformation (measured at the end of the test), respectively. Additionally, the battery capacity
C is controlled with the same quadratic approach, obtaining the objective functions reported in Equations (
11)–(
13) which constitute the multi-objective problem statement presented in Equation (
14) as a vector of objective functions.
Depending on the same set of parameters
from the same multiphysics modeling, the objective functions cannot be minimized at the same time and independently. Therefore, the multi-objective problem is solved using a scalarization approach to reduce computational complexity and enable variations in the weighting of the objective functions with respect to the Pareto technique [
31,
32]. Thus, a single objective function is obtained in Equations (
15) and (
16), where
is the weights vector of the objective functions. Weighting factors are eventually applied to prioritize certain objective functions over others. The electrochemical-only parameter estimation
is used to ignore the mechanical objective function.
2.4. Optimization Algorithm
Since the optimization problem involves multiple objectives, the derivative of with respect to the control variables is not easily obtainable: the presence of several objectives complicates the calculation of a unique and continuous gradient, making gradient-based algorithms unsuitable. In addition, changes in geometry often lead to remeshing, which may introduce discontinuities or non-differentiable behavior in the objective function. As a result, the computed gradients may be inaccurate or undefined. Therefore, a derivative-free algorithm is more appropriate for addressing this type of problem. The drawback is the slower convergence of the optimization process.
Among the derivative-free algorithms implemented in COMSOL Multiphysics, BOBYQA (Bound Optimization BY Quadratic Approximation) is the only one that uses a quadratic interpolation model to approximate the objective function. Unlike gradient-based methods, BOBYQA constructs and updates a local quadratic model
using only objective function evaluations. In particular, the quadratic model is built to interpolate the objective function at a set of
m interpolation points
, with
, as shown in Equation (
17), where
indicates the
j-th parameter set. The interpolation points are strategically chosen and updated, as stated by Powell in his work [
21].
Then, the quadratic approximation of the objective function has the form presented in Equation (
18), where
c is a scalar constant,
is the estimated gradient,
is an approximated Hessian matrix, and
is the evaluation point at the k-th iteration.
To determine the next point to evaluate, BOBYQA minimizes the quadratic model
within a neighborhood of the current point
, known as the
trust region. This area is defined by a radius
, which bounds the maximum allowed step from the current iteration. The trust-region subproblem is expressed in Equation (
19).
After evaluating the objective function at the new candidate point, the radius is updated depending on the agreement between the predicted decrease in and the actual decrease in . If the model prediction is sufficiently accurate, is expanded to allow broader exploration; otherwise, it is reduced to focus on a more local region, enhancing model reliability but risking the possibility of missing the global minimum. In parallel, the quadratic model itself is updated to maintain interpolation accuracy: whenever a new function evaluation is accepted and one of the existing interpolation points is replaced, the curvature of the model—represented by the Hessian approximation —must also be updated. This update ensures that the new model still satisfies the interpolation conditions at the updated set of points.
2.5. Error Analysis and Models Comparison
Once the parameters are estimated using the least squares method, the Root Mean Square Errors (RMSEs) of the fitted curves are computed, and the reliability of the parameter estimates is evaluated using the covariance matrix. For
n parameters
, the covariance matrix
is expressed, as shown in Equation (
20).
The diagonal elements represent the variances of the individual parameter estimates, indicating the variability in each estimation. The off-diagonal elements represent the covariance between pairs of parameters, reflecting their linear relationship.
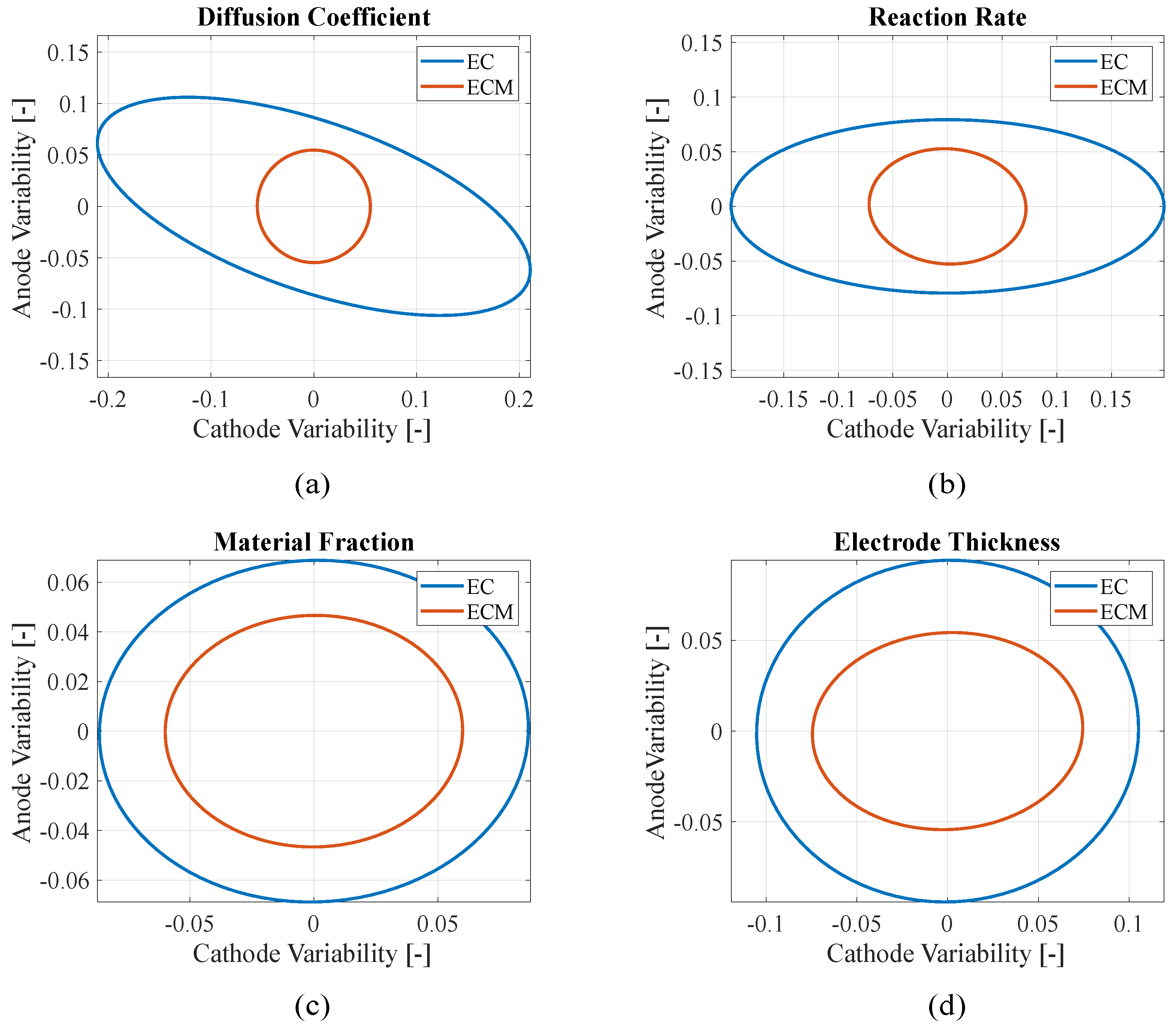
In this model, during the optimization process, each iteration produces a set of parameters that typically improves or maintains the objective function value. These intermediate estimates can be interpreted as a set of plausible solutions within the parameter space. By treating them as empirical samples, it is possible to compute a covariance matrix that captures the spread and correlation of the parameters across iterations. The empirical covariance matrix can then be used to construct confidence (or error) ellipses for selected pairs of parameters. These ellipses are derived from the submatrices of the covariance matrix , which are symmetric and positive definite. The rescaling of the parameters is needed because of the difference in order of magnitude and units of measure of the estimated parameters.
The orientation of the ellipse is determined by the covariance between the two parameters. Specifically, the orientation of the ellipse can be described by an angle , measured with respect to the x-axis: the closer is to °, the stronger the correlation between the parameters, while ° or ° indicates no correlation. On the other hand, a larger ellipse indicates higher variances in the estimated parameters across iterations, suggesting that the algorithm has explored a broader region of the parameter space. While this may reflect a more thorough search of the objective function landscape, it can also be a sign of reduced convergence toward stable parameter values. For this reason, the confidence ellipses—which provide a qualitative representation of the parameter uncertainty and correlation given by the optimization model—should be considered together with the RMSE values to enable a more comprehensive comparison between the electrochemical and the electrochemical–mechanical approach.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}