
Mode Shape Extraction with Denoising Techniques Using Residual Responses of Contact Points of Moving Vehicles on a Beam Bridge


Abstract
1. Introduction
2. Methodology
2.1. Dynamics Under Moving Vehicles
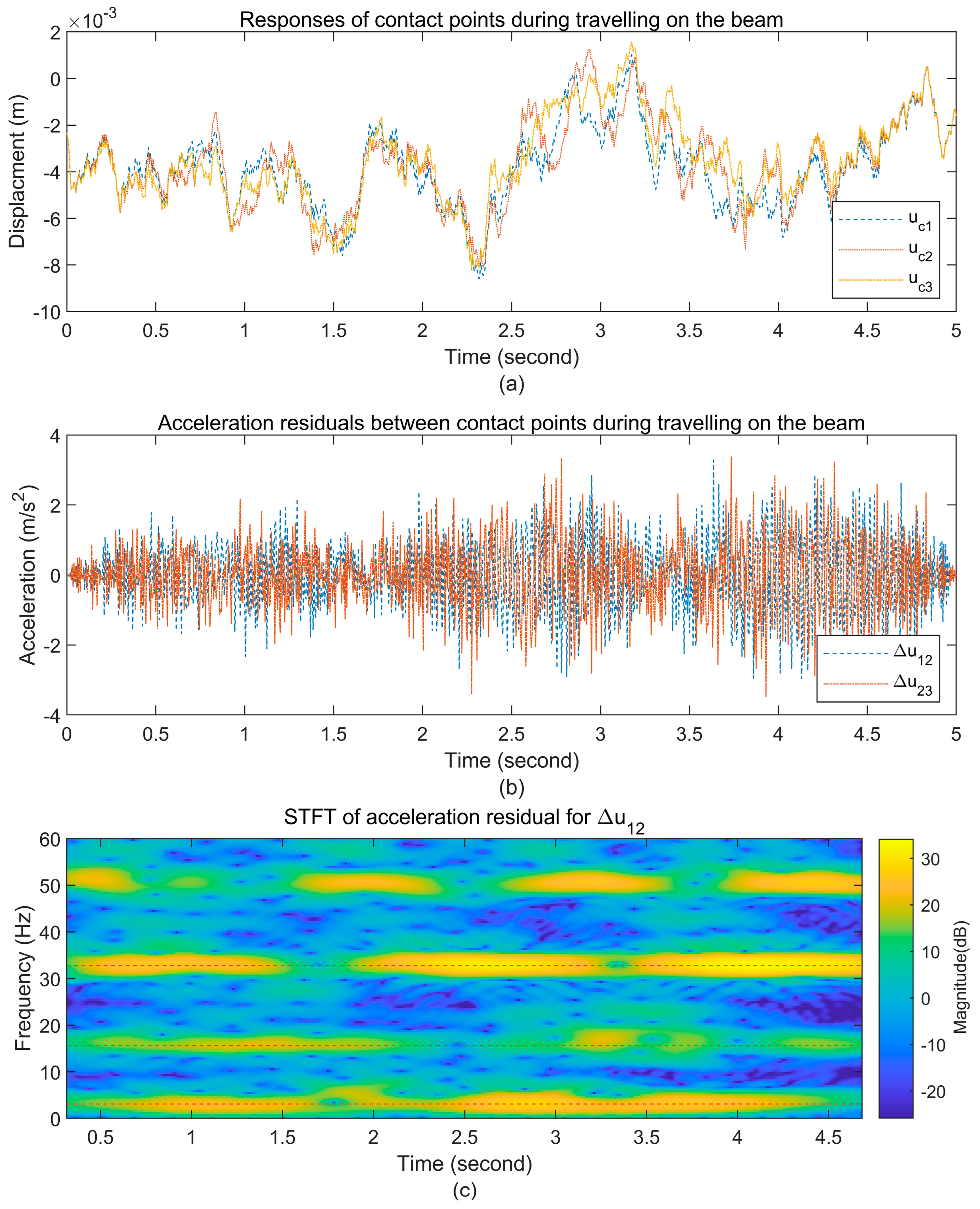
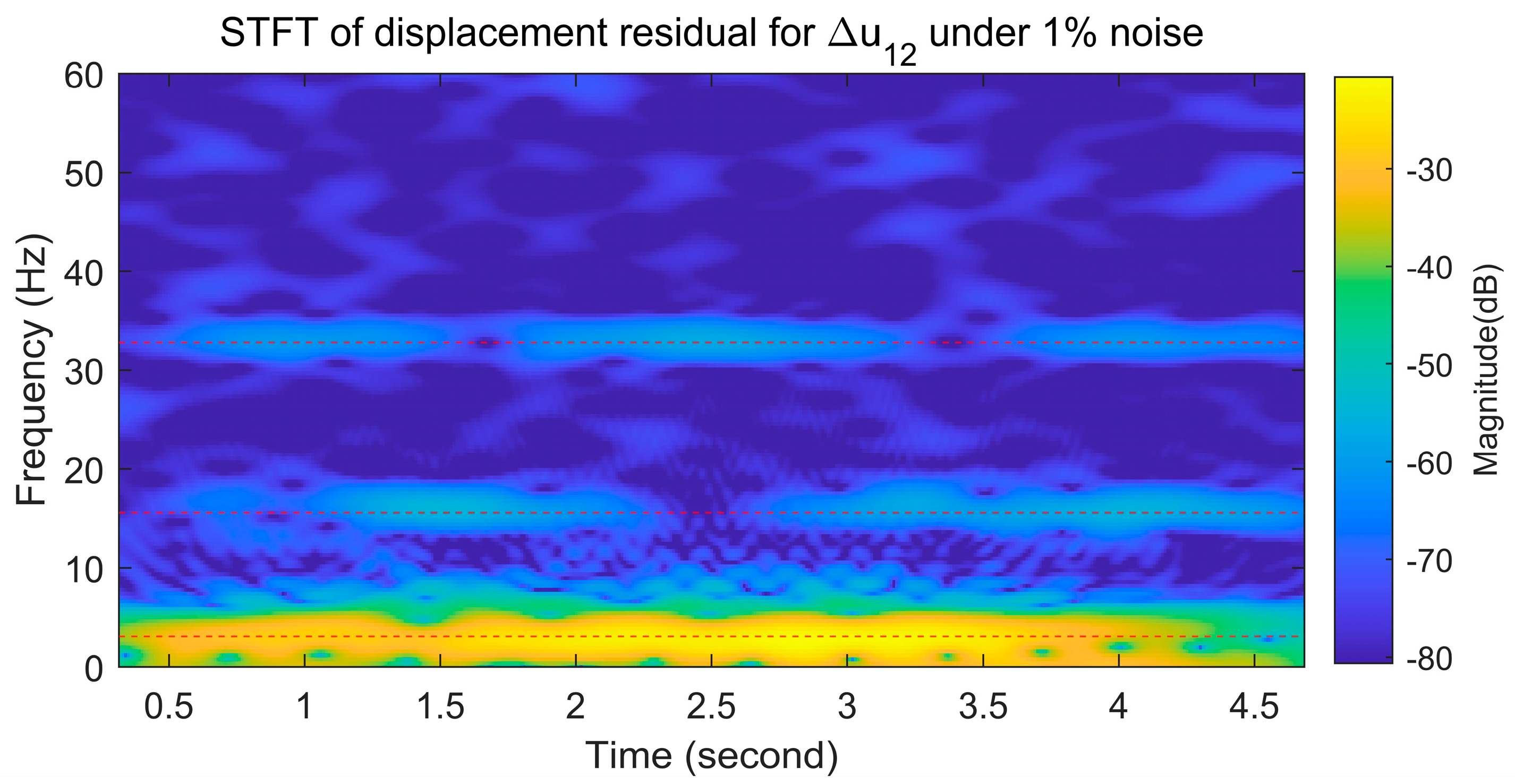
2.2. Short-Time Fourier Transform
2.3. Finite Element Modeling
2.4. Roughness Profile Simulation
2.5. Denoise Methods
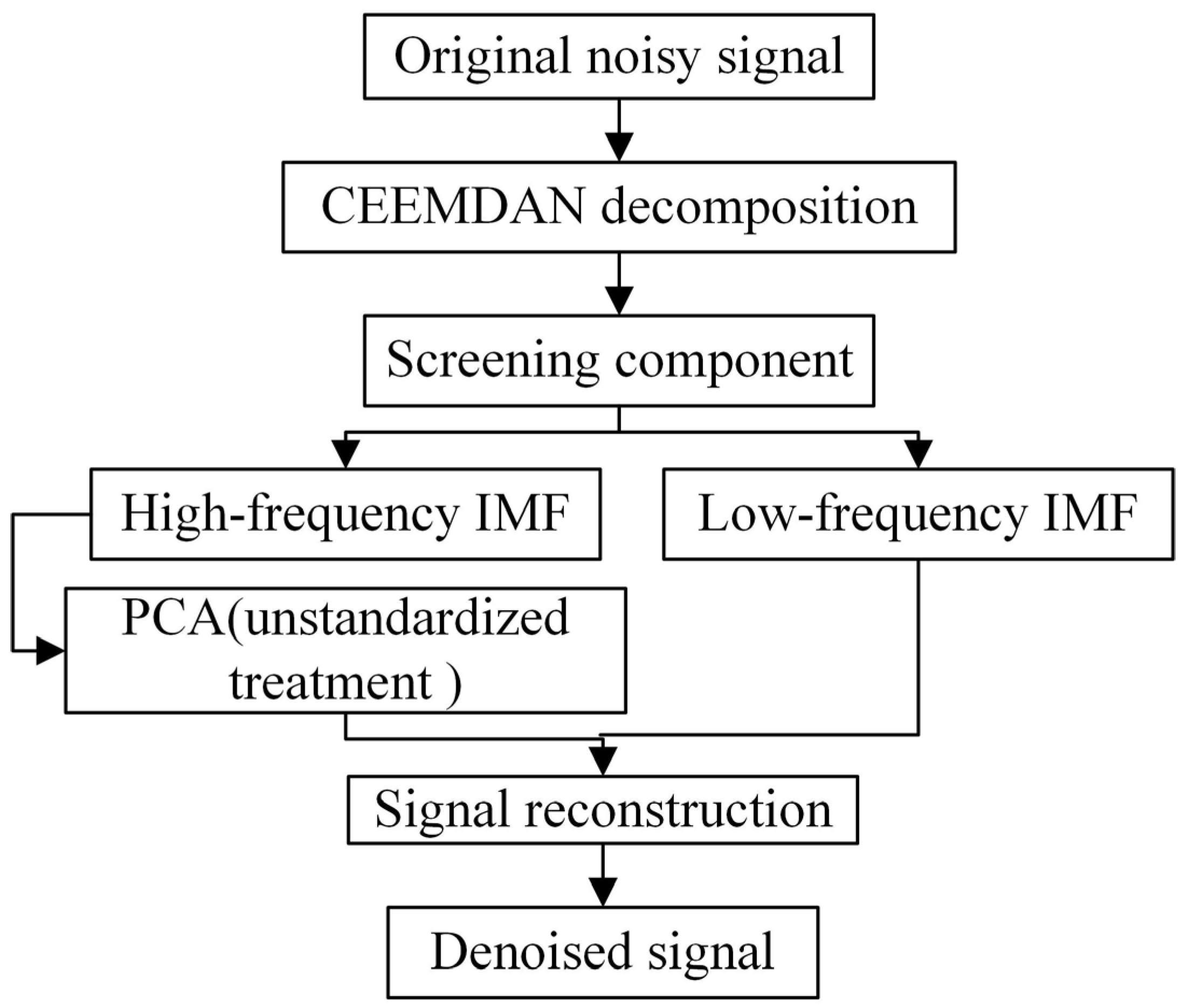
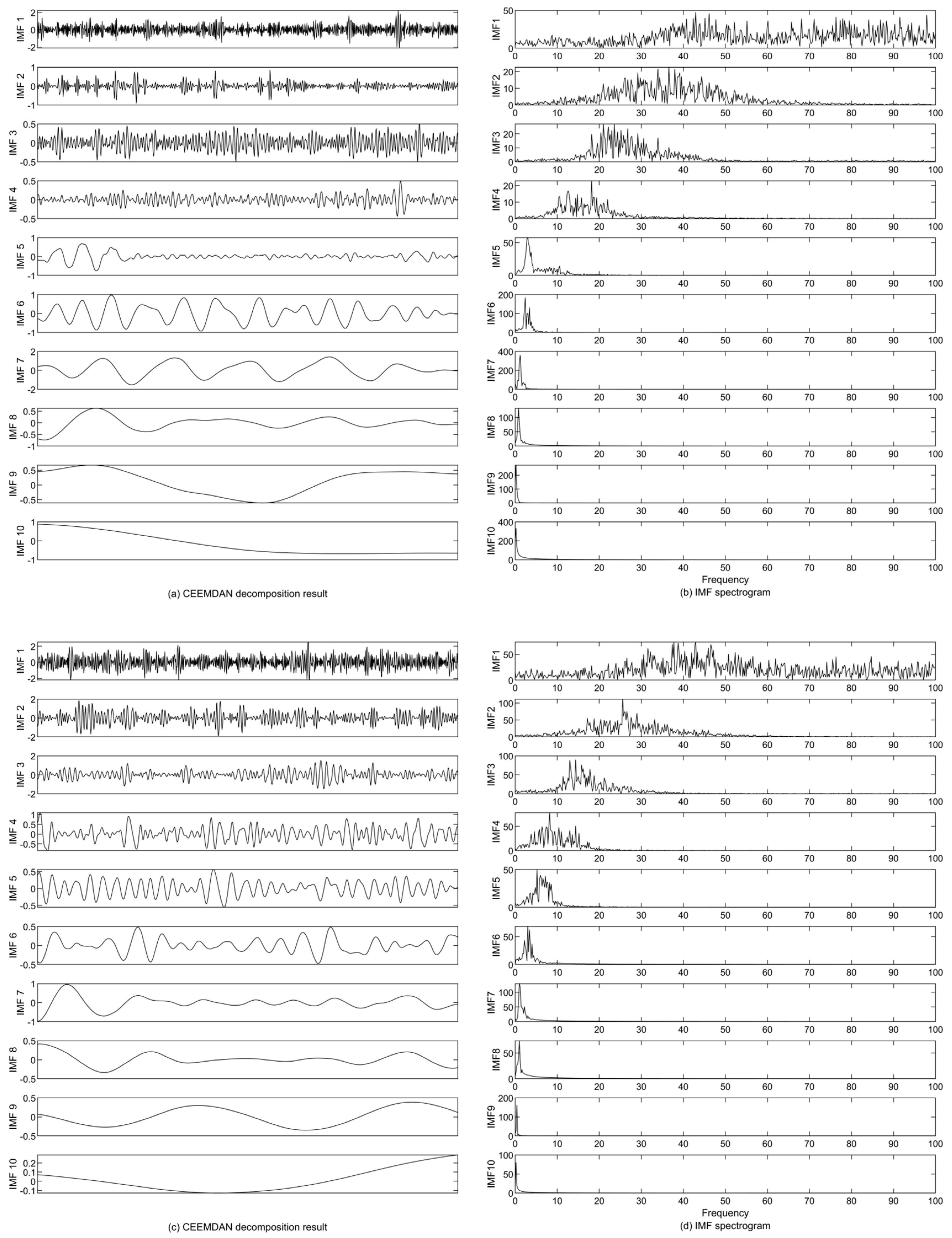
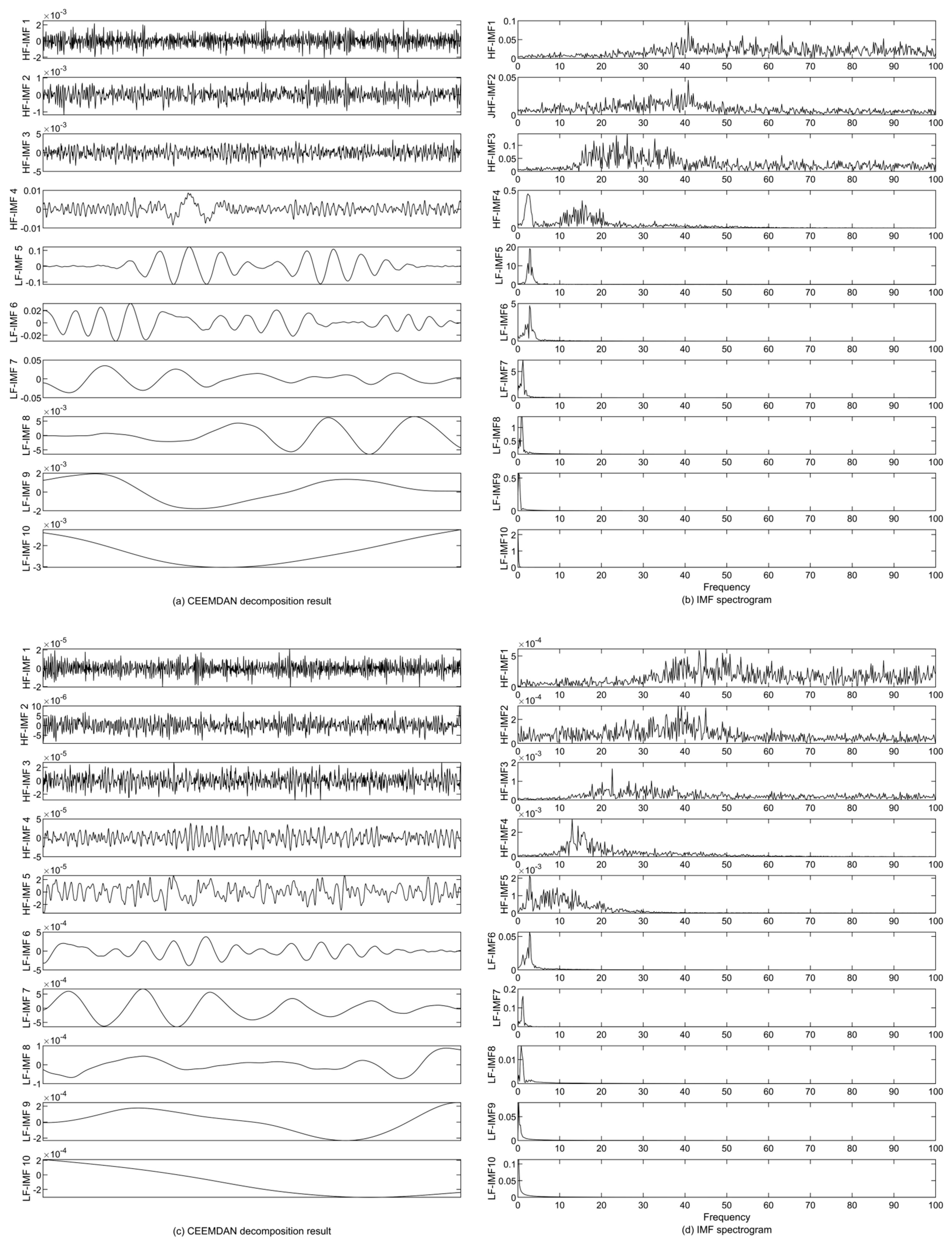
2.5.1. CEEMDAN-NSPCA Denoising Algorithm
2.5.2. CEEMDAN-IWT Denoising Algorithm
2.5.3. Evaluation Index of Noise Reduction
3. Simulation Examples
3.1. Configurations
3.2. Residual STFT-Based Mode Shape Extraction
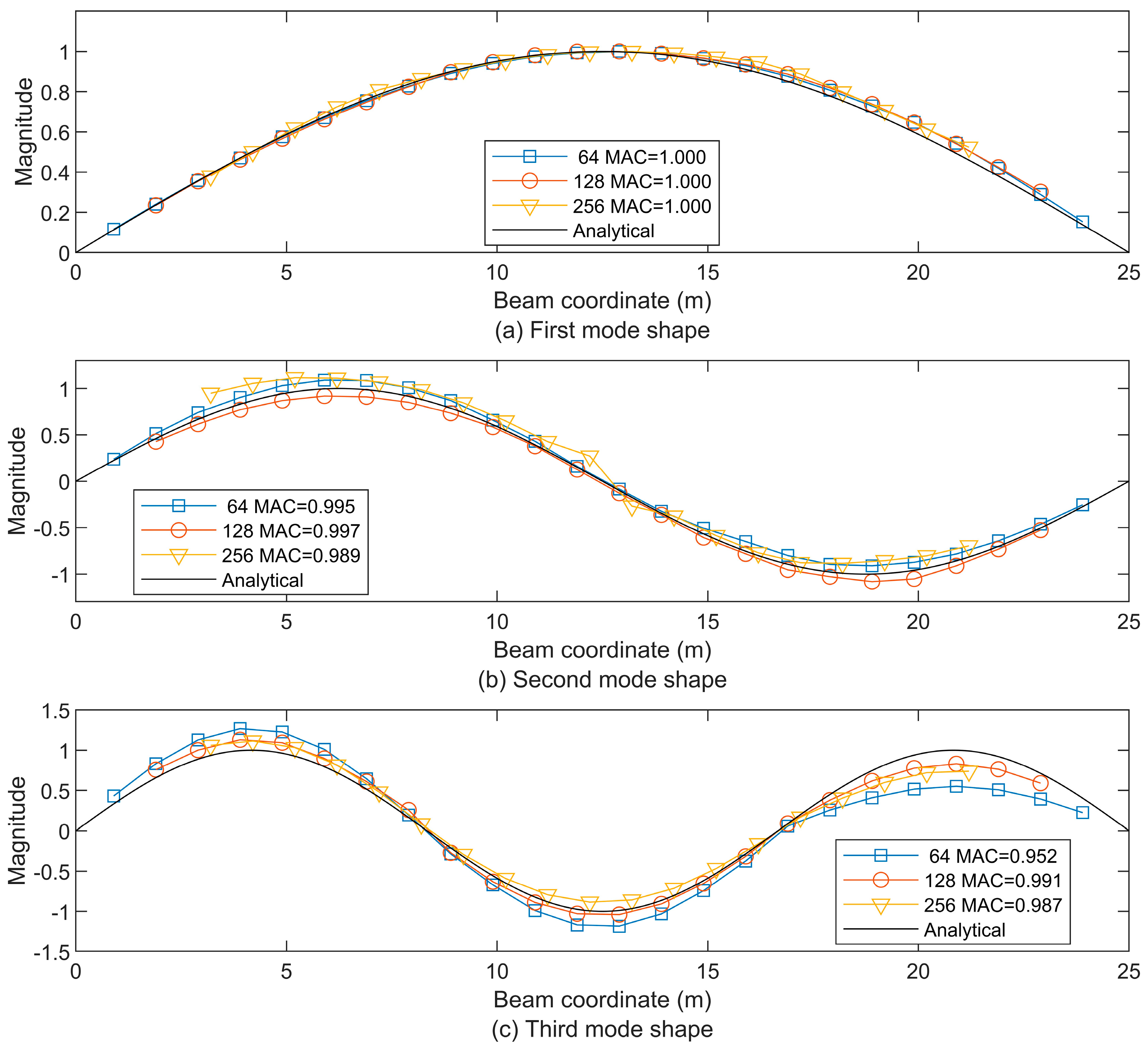
3.2.1. Effect of Window Size
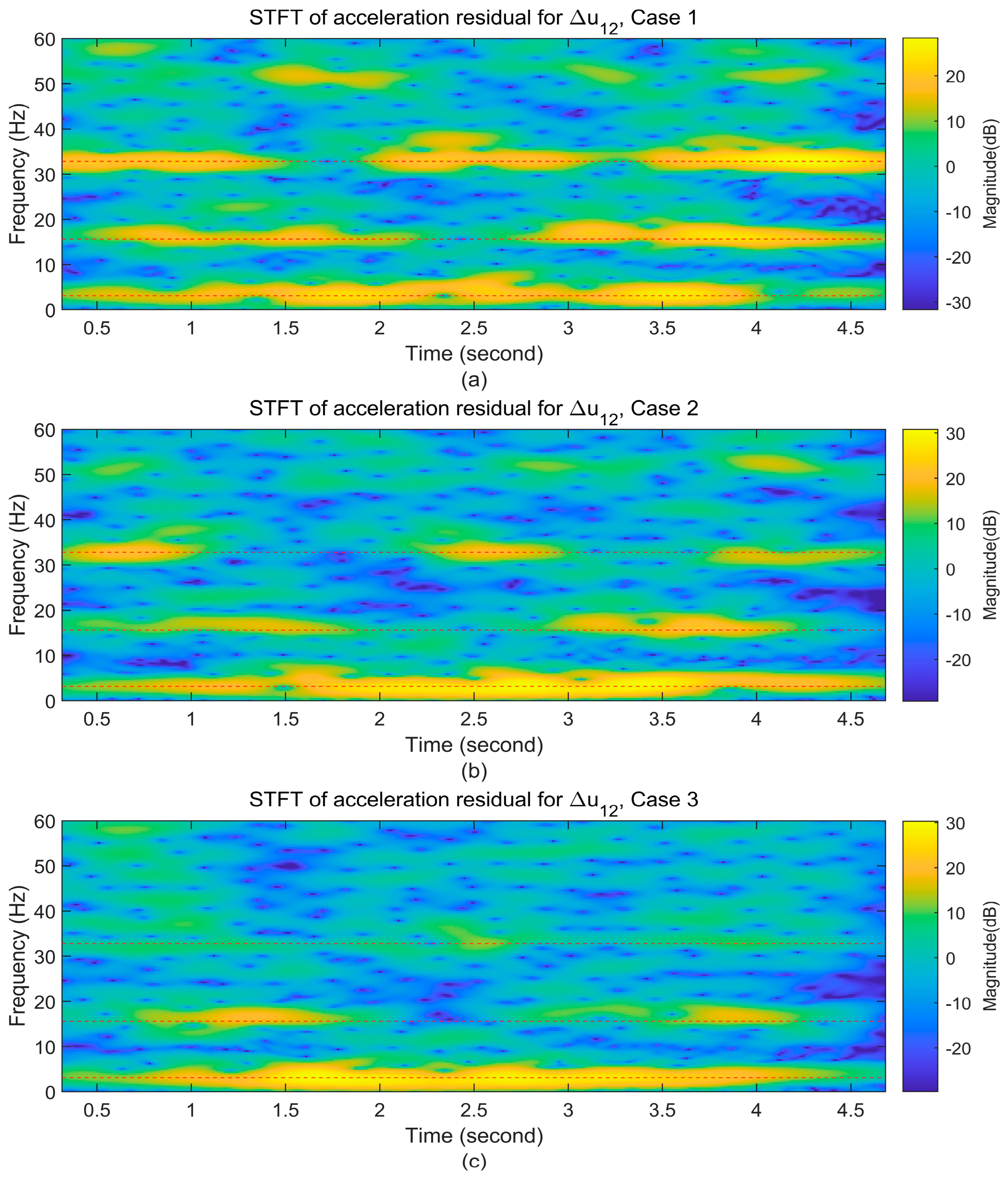
3.2.2. Effect from Vehicle Velocity
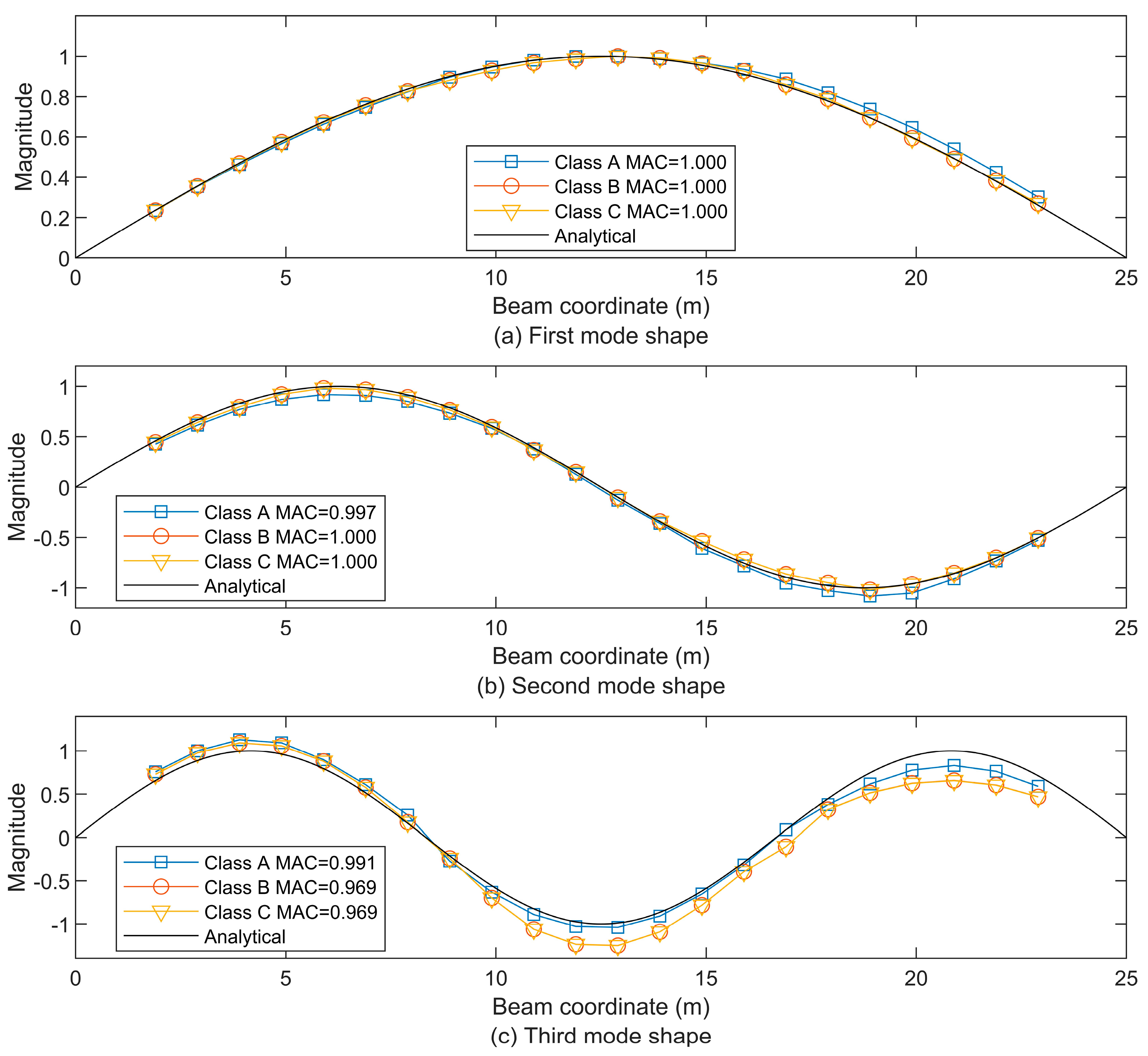
3.2.3. Effect of Road Roughness
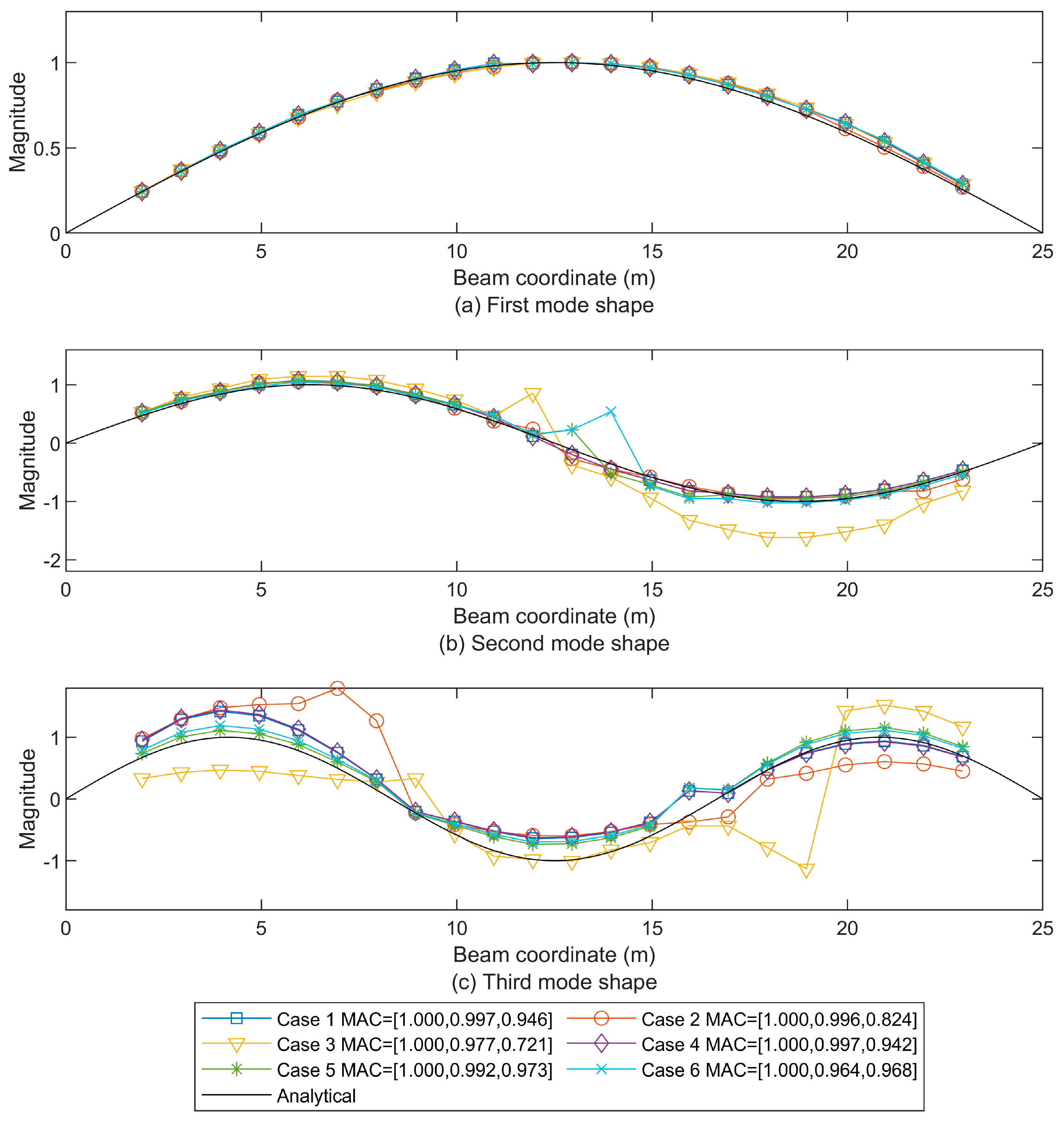
3.2.4. Effect from the Beam Damping Property
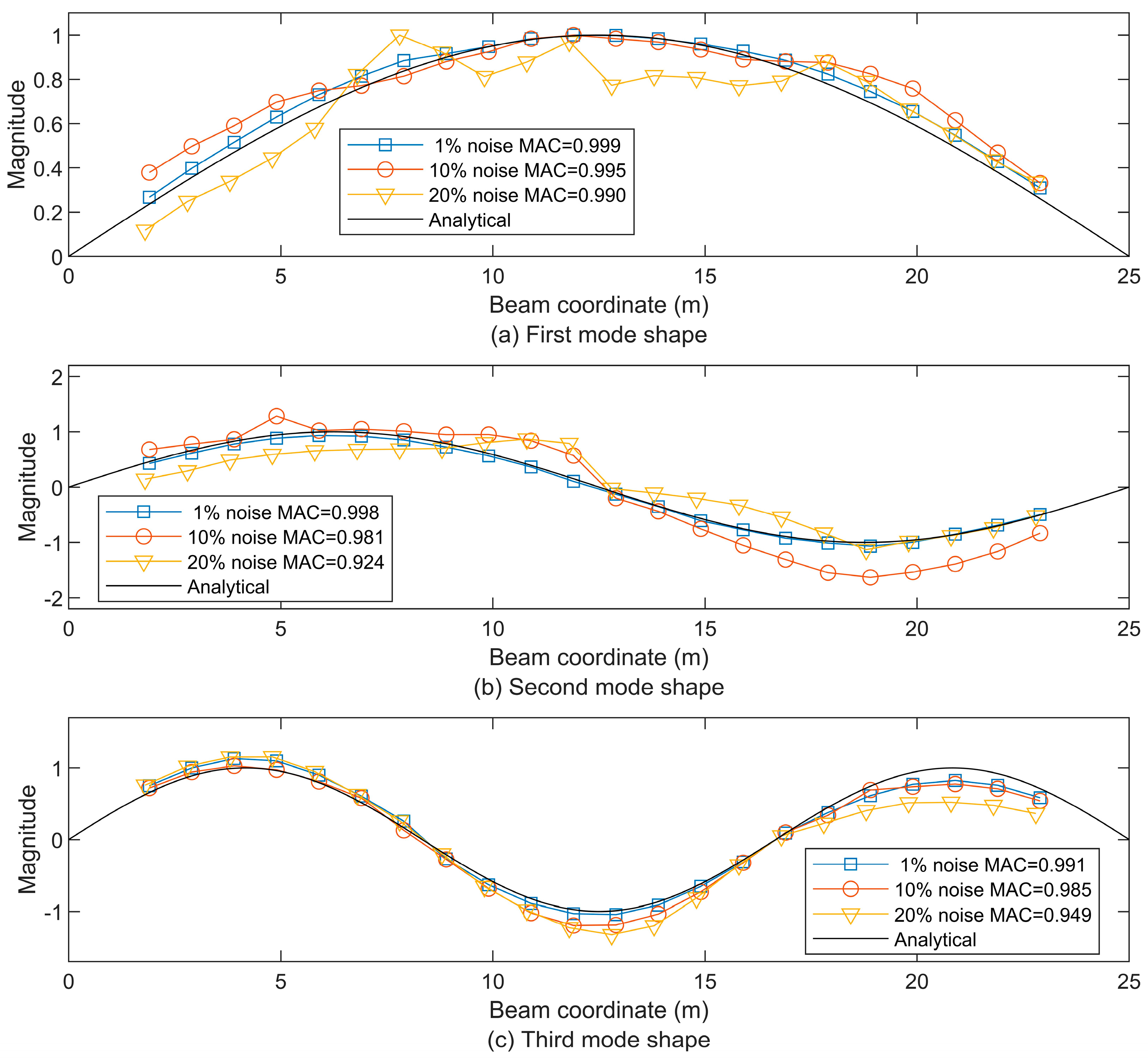
3.2.5. Effect of Noisy Disturbances
3.3. Mode Shape Extraction Using Displacement Approximation of Contact Points
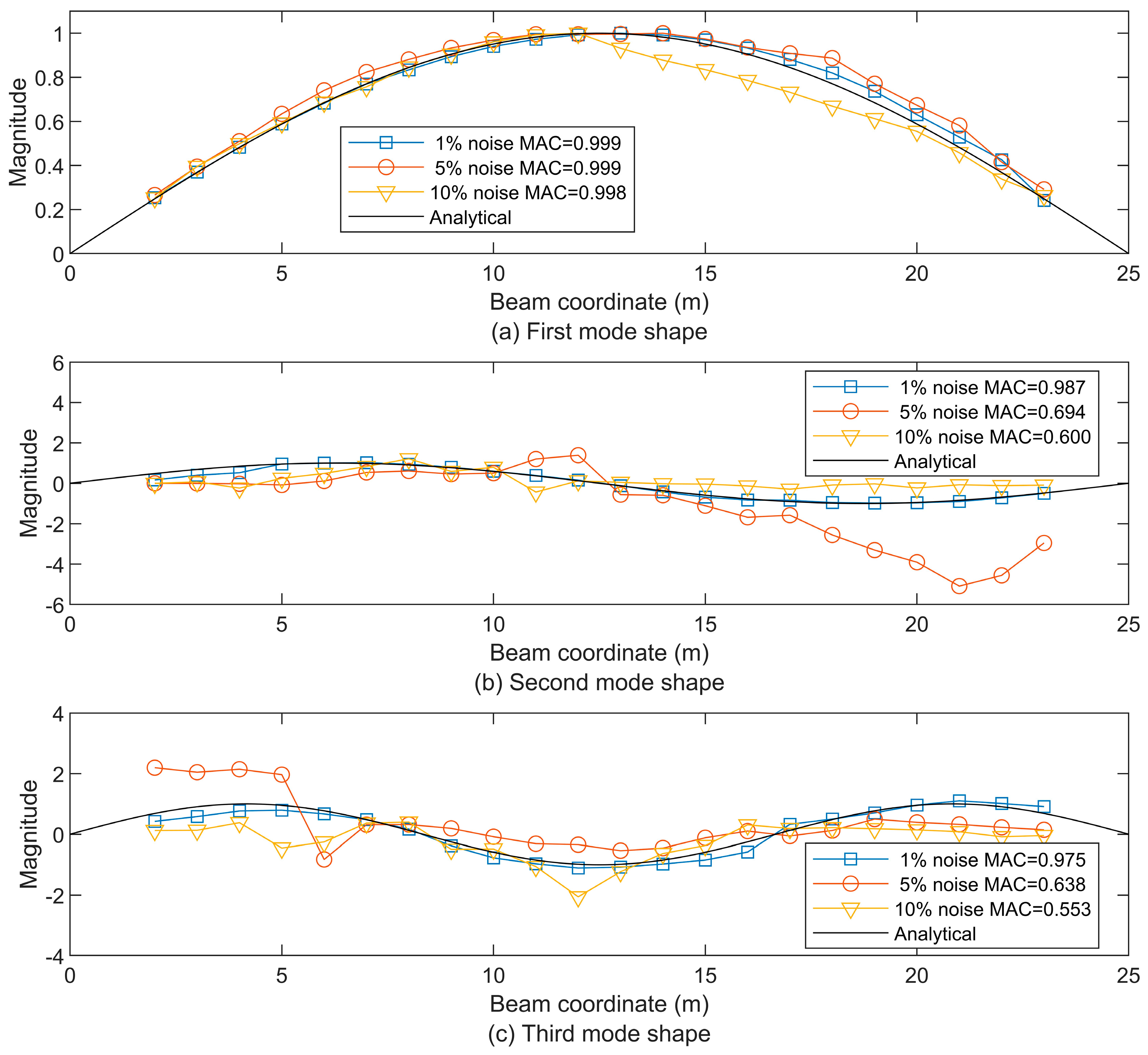
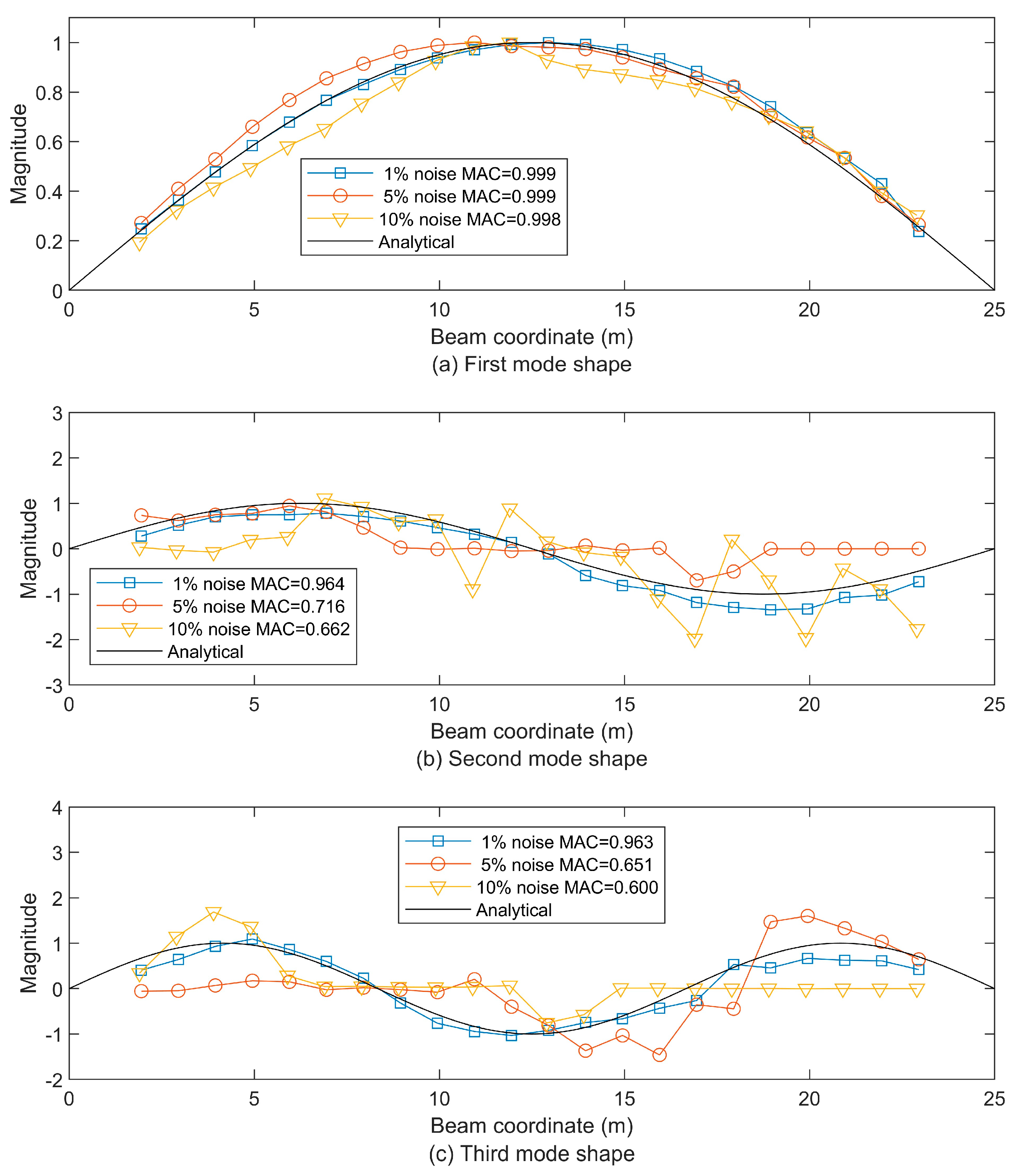
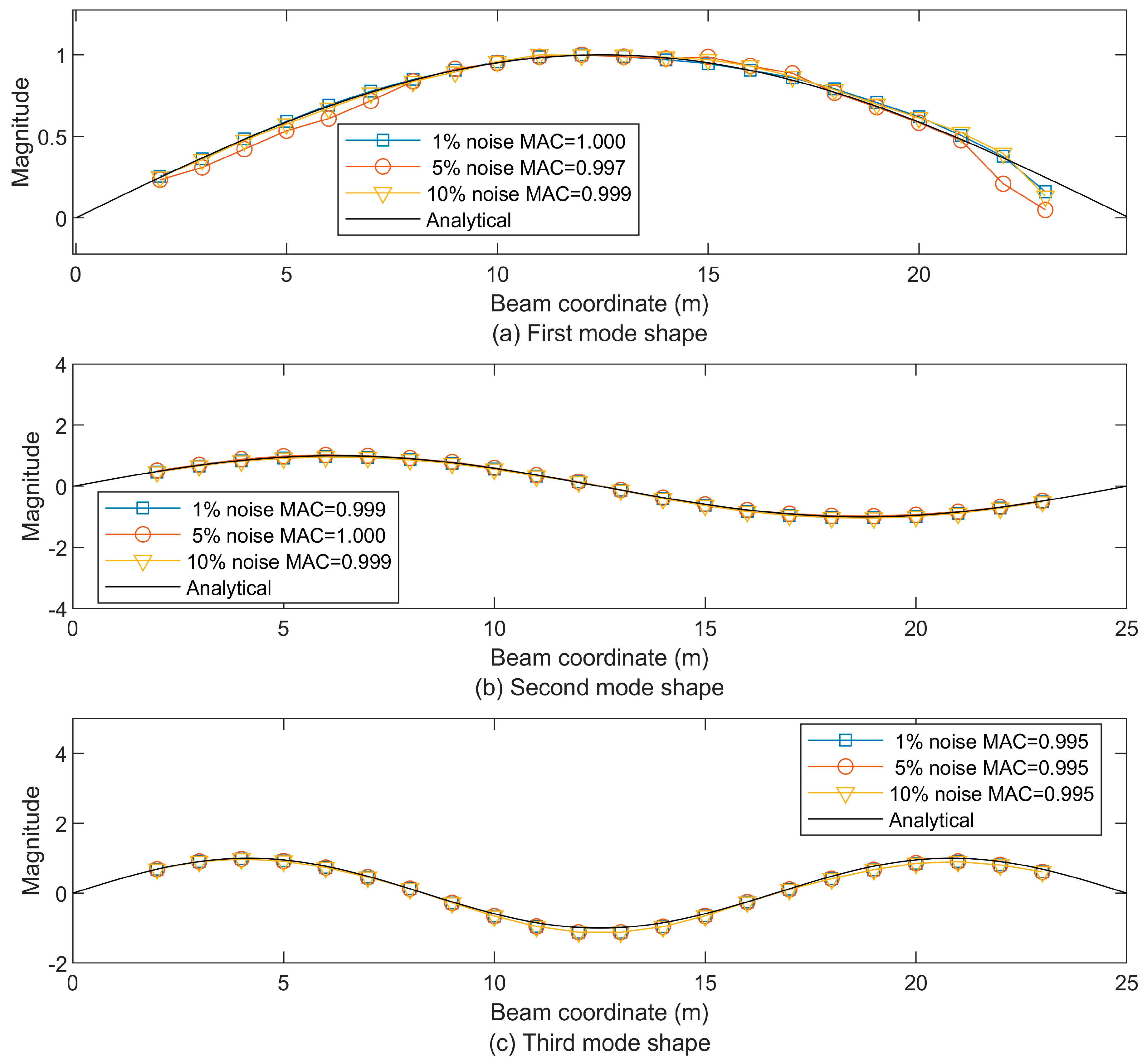
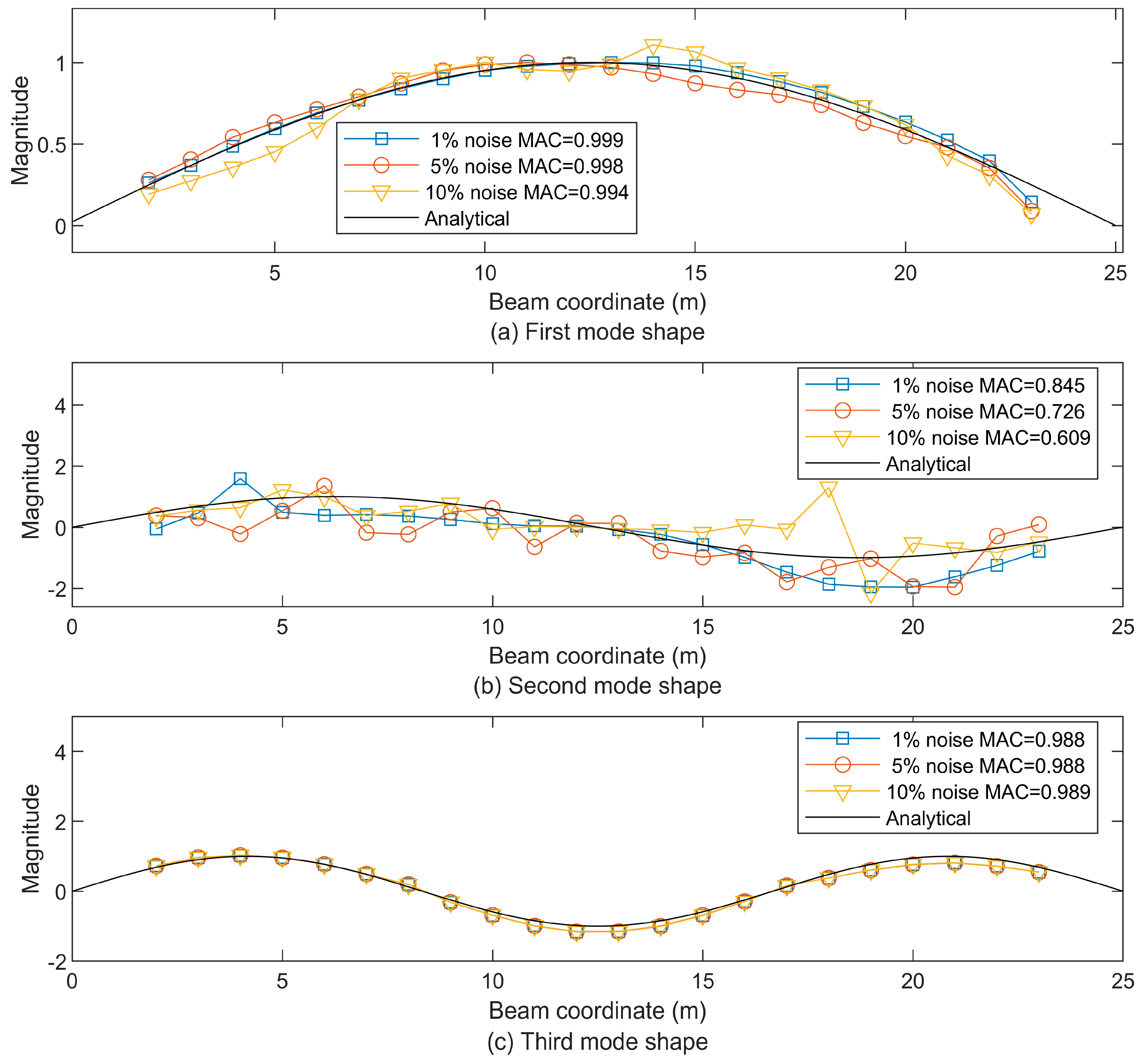
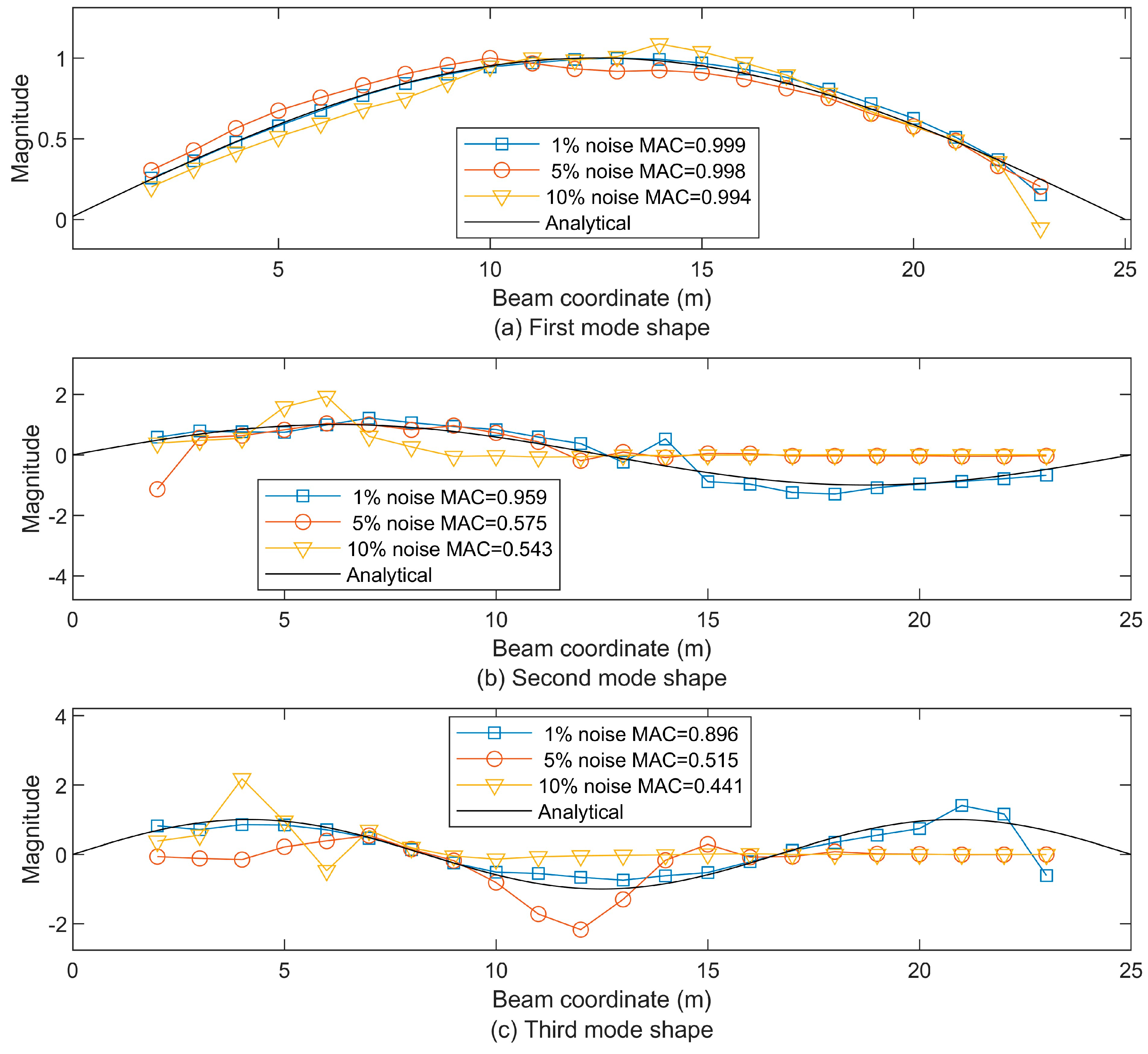
3.3.1. Effect from Noisy Disturbance
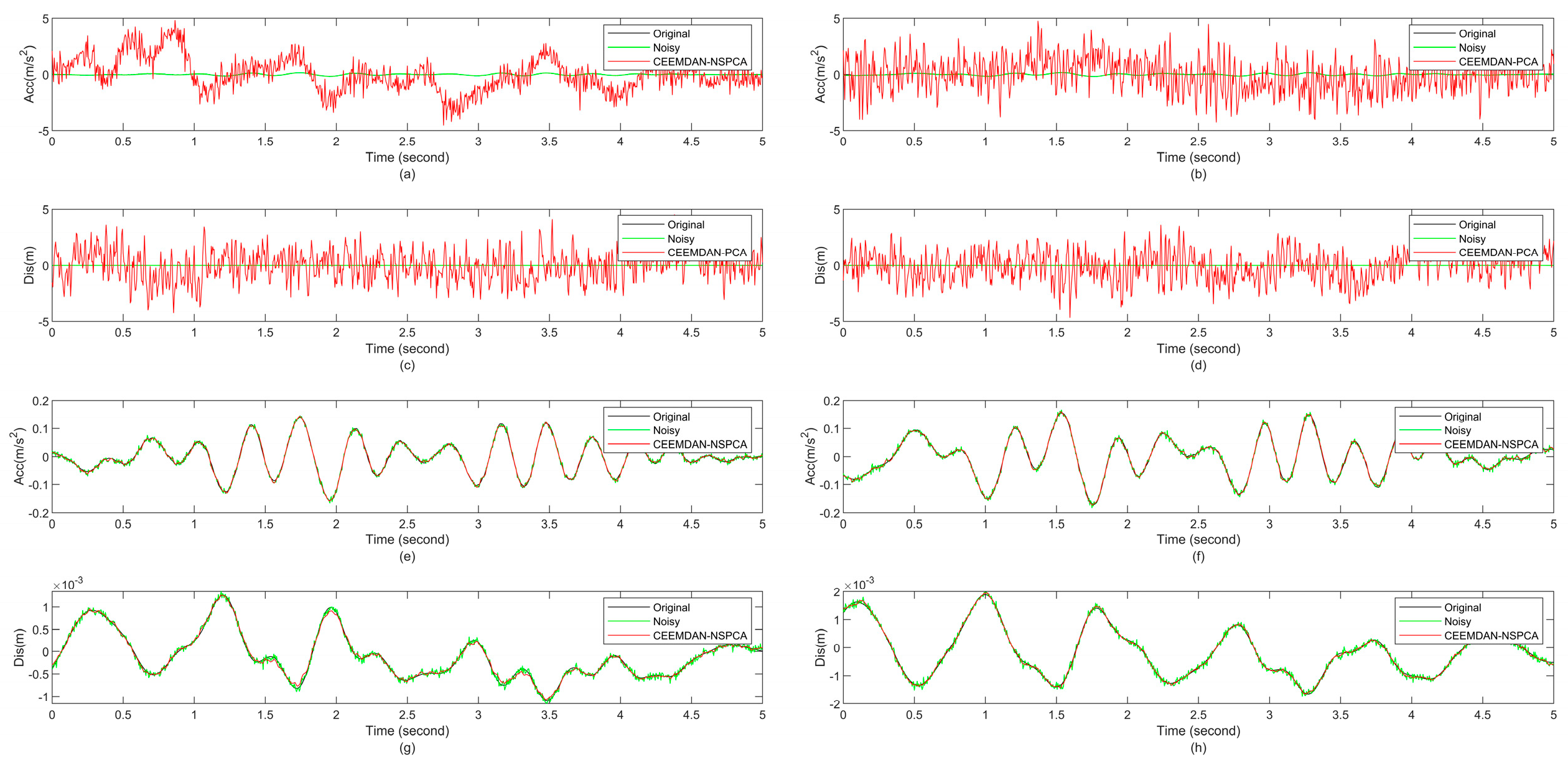
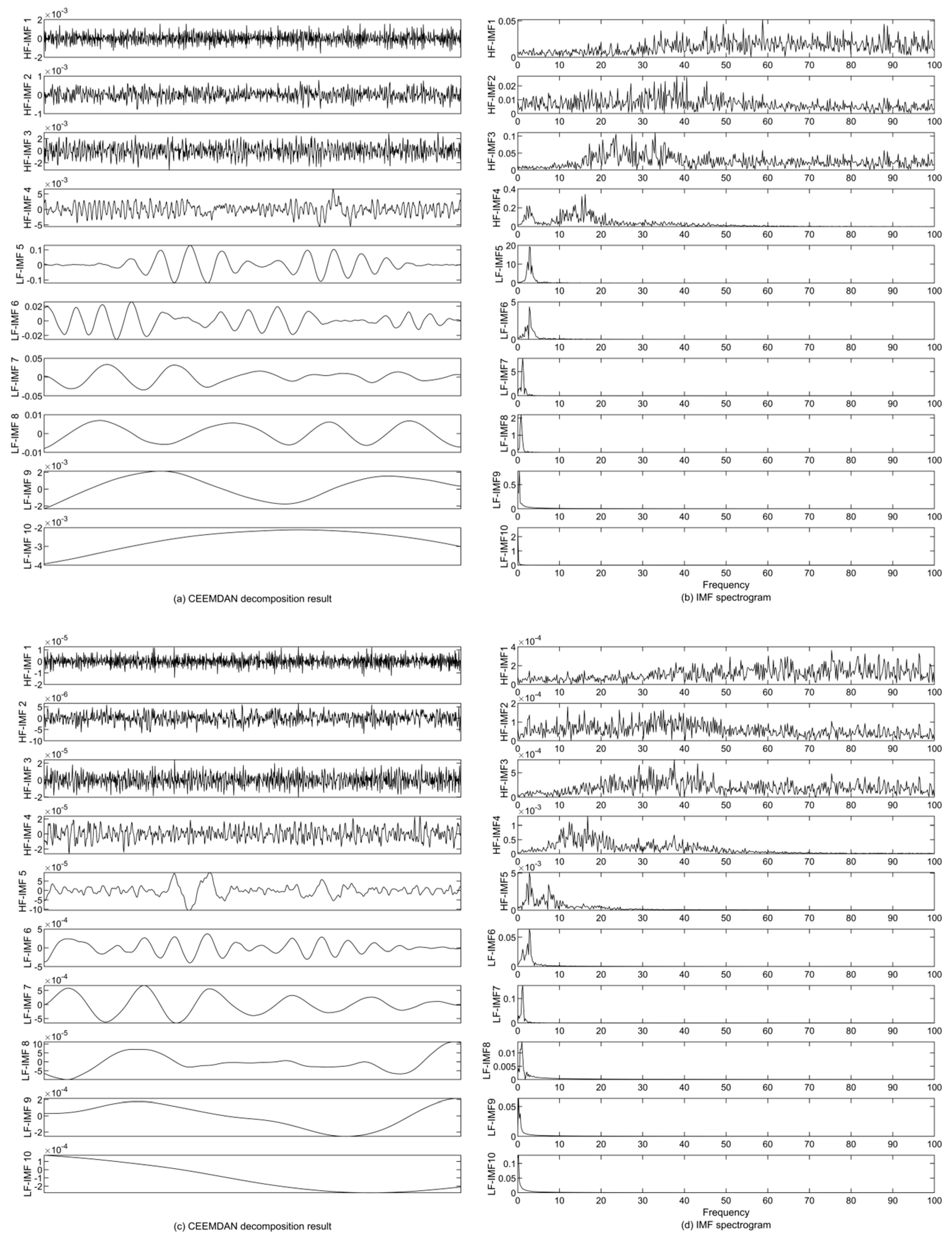
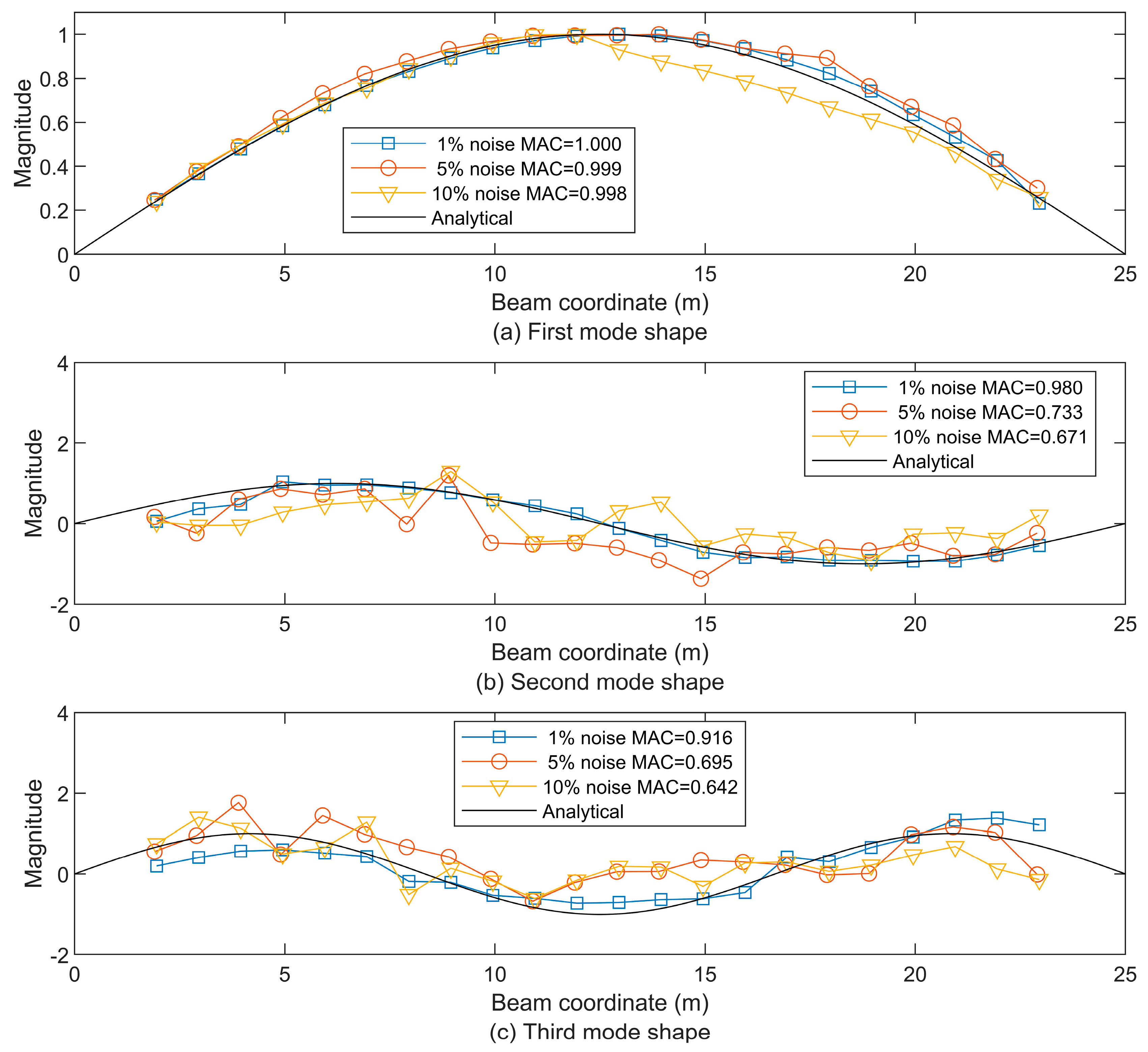
3.3.2. Mode Shape Extraction with CEEMDAN-NSPCA
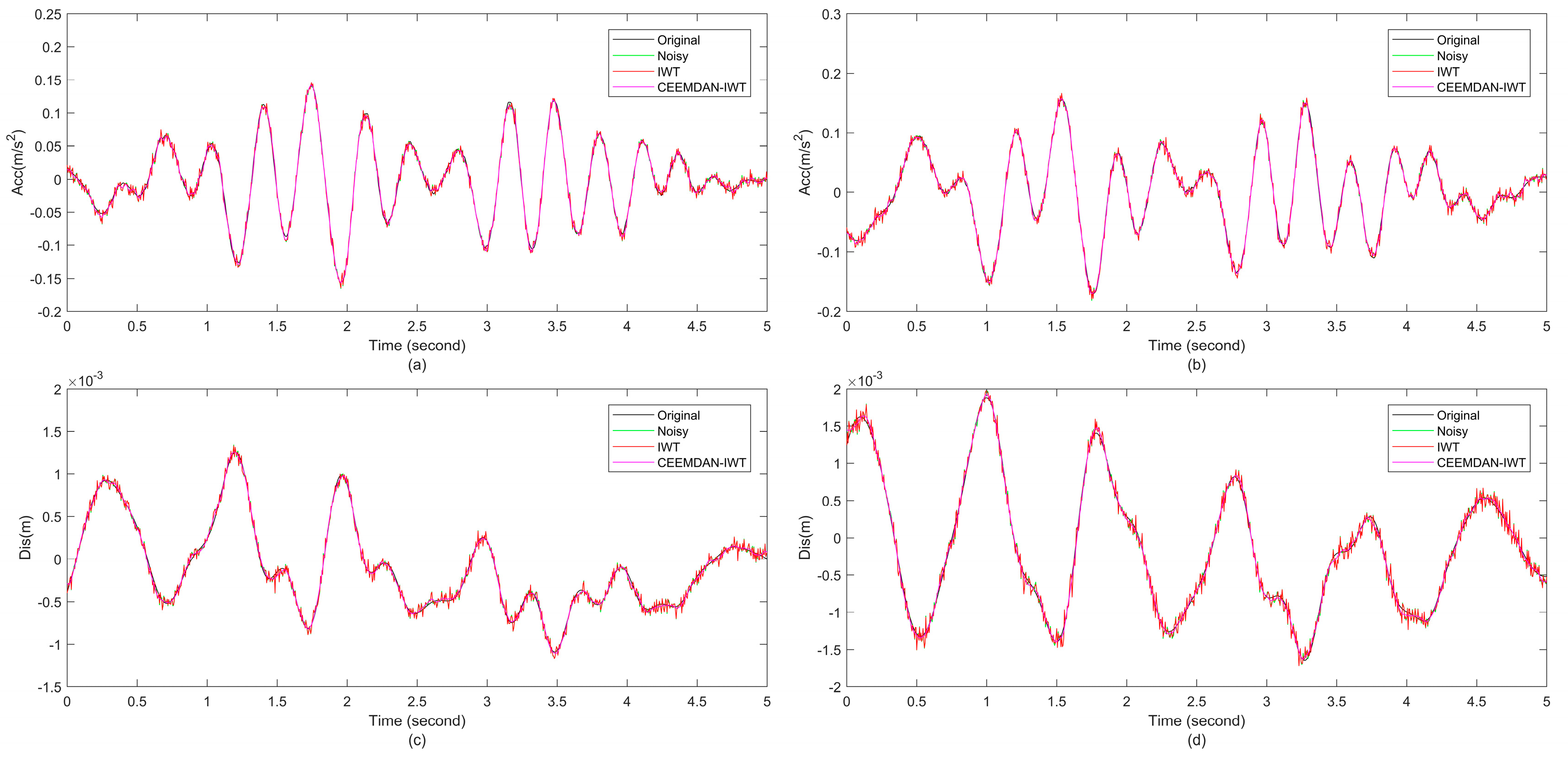
3.3.3. Mode Shape Extraction with CEEMDAN-IWT
3.3.4. The Influence of Noise Interference at the Specified Frequency Band
4. Conclusions
- (1)
- Several key parameters were investigated, including window size, vehicle speed, road surface roughness, beam damping characteristics, and the influence of traffic flow. Among them, the damping characteristics of the beam are crucial to the performance of modal vibration mode extraction. A higher damping ratio (greater than 0.03) leads to modal shape distortion. The addition of traffic flow can amplify the beam response, thereby improving the accuracy of extracting modal shapes.
- (2)
- Two advanced denoising methods, CEEMDAN-NSPCA and CEEMDAN-IWT, were developed to enhance modal shape extraction under noisy conditions. CEEMDAN-NSPCA applies PCA-based dimensionality reduction to high-frequency components after CEEMDAN while preserving low-frequency content. CEEMDAN-IWT employs an improved wavelet thresholding strategy for denoising high-frequency components. Compared with conventional CEEMDAN-PCA and IWT denoising techniques, the proposed methods offer superior noise suppression while retaining essential micro-fluctuation characteristics. The results demonstrate that CEEMDAN-IWT achieves the highest accuracy and stability, particularly in the second and third modal shapes.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lan, Y.; Li, Z.; Lin, W. Physics-guided diagnosis framework for bridge health monitoring using raw vehicle accelerations. Mech. Syst. Signal Process. 2024, 206, 110899. [Google Scholar] [CrossRef]
- Corbally, R.; Malekjafarian, A. A deep-learning framework for classifying the type, location, and severity of bridge damage using drive-by measurements. Comput.-Aided Civ. Infrastruct. Eng. 2023, 39, 852–871. [Google Scholar] [CrossRef]
- He, Y.; Yang, J.P.; Yan, Z. Enhanced identification of bridge modal parameters using contact residuals from three-connected vehicles: Theoreticalstudy. Structures 2023, 54, 1320–1335. [Google Scholar] [CrossRef]
- Li, D.; Ren, W.-X.; Yang, D.; Hu, Y.-D. Operational modal analysis of structures by stochastic subspace identification with a delay index. Struct. Eng. Mech. 2016, 59, 187–207. [Google Scholar] [CrossRef]
- Fang, Y.; Xing, J.; Zhang, Y. Bridge damage identification with improved HHT and PSD sensitivity method based on vehicle response. J. Braz. Soc. Mech. Sci. Eng. 2024, 46, 237. [Google Scholar] [CrossRef]
- Malekjafarian, A.; Khan, M.; Obrien, E.; Micu, E.; Bowe, C.; Ghiasi, R. Indirect Monitoring of Frequencies of a Multiple Span Bridge Using Data Collected from an Instrumented Train: A Field Case Study. Sensors 2022, 22, 7468. [Google Scholar] [CrossRef] [PubMed]
- Barbosh, M.; Singh, P.; Sadhu, A. Empirical mode decomposition and its variants: A review with applications in structural health monitoring. Smart Mater. Struct. 2020, 29, 093001. [Google Scholar] [CrossRef]
- Hashlamon, I.; Nikbakht, E. The Use of a Movable Vehicle in a Stationary Condition for Indirect Bridge Damage Detection Using Baseline-Free Methodology. Appl. Sci. 2022, 12, 11625. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, S.S.P. (Eds.) Hilbert-Huang Transform and Its Applications, 2nd ed.; World Scientific: Hackensack, MN, USA, 2014. [Google Scholar]
- Mazzeo, M.; Di Matteo, A.; Santoro, R. An enhanced indirect modal identification procedure for bridges based on the dynamic response of moving vehicles. J. Sound Vib. 2024, 589, 118540. [Google Scholar] [CrossRef]
- Sadeghi Eshkevari, S.; Matarazzo, T.J.; Pakzad, S.N. Bridge modal identification using acceleration measurements within moving vehicles. Mech. Syst. Signal Process. 2020, 141, 106733. [Google Scholar] [CrossRef]
- Oshima, Y.; Yamamoto, K.; Sugiura, K. Damage assessment of a bridge based on mode shapes estimated by responses of passing vehicles. Smart Struct. Syst. 2014, 13, 731–753. [Google Scholar] [CrossRef]
- Zhan, Y.; Au, F.T.K.; Zhang, J. Bridge identification and damage detection using contact point response difference of moving vehicle. Struct. Control Health Monit. 2021, 28, e2837. [Google Scholar] [CrossRef]
- Kong, X.; Tang, Q.; Luo, K.; Hu, J.; Li, J.; Cai, C.S. Vehicle Response Based Bridge Modal Identification Using Different Time-Frequency Analysis Methods. Int. J. Struct. Stab. Dyn. 2024, 25, 2550062. [Google Scholar] [CrossRef]
- Yang, Y.B.; Xu, H.; Wang, Z.-L.; Shi, K. Using vehicle–bridge contact spectra and residue to scan bridge’s modal properties with vehicle frequencies and road roughness eliminated. Struct. Control Health Monit. 2022, 29, e2968. [Google Scholar] [CrossRef]
- He, Y.; Yang, J.P.; Chen, J. Estimating Bridge Modal Parameters from Residual Response of Two-Connected Vehicles. J. Vib. Eng. 2022, 11, 2969–2983. [Google Scholar] [CrossRef]
- Malekjafarian, A.; Corbally, R.; Gong, W. A review of mobile sensing of bridges using moving vehicles: Progress to date, challenges and future trends. Structures 2022, 44, 1466–1489. [Google Scholar] [CrossRef]
- Erduran, E.; Gonen, S. Contact point accelerations, instantaneous curvature, and physics-based damage detection and location using vehicle-mounted sensors. Eng. Struct. 2024, 304, 117608. [Google Scholar] [CrossRef]
- Zheng, X.; Yang, L.; Qi, Z.; Lu, P.; Wu, Y.; Jin, T.; Zhou, Y. BPF-WT combined filtering method for indirect identification of bridge dynamic characteristics. Meas. Sci. Technol. 2024, 35, 045901. [Google Scholar] [CrossRef]
- Xu, H.; Yang, D.S.; Chen, J.; Wang, C.H.; Yang, Y.B. Novel recursive formula for removing damping distortion effect on bridge mode shape restoration using a two-axle scanning vehicle. Eng. Struct. 2024, 308, 117914. [Google Scholar] [CrossRef]
- Xu, H.; Liu, Y.H.; Yang, M.; Yang, D.S.; Yang, Y.B. Mode shape construction for bridges from contact responses of a two-axle test vehicle by wavelet transform. Mech. Syst. Signal Process. 2023, 195, 110304. [Google Scholar] [CrossRef]
- Qiao, G.; Rahmatalla, S. Moving load identification on Euler-Bernoulli beams with viscoelastic boundary conditions by Tikhonov regularization. Inverse Probl. Sci. Eng. 2021, 29, 1070–1107.22. [Google Scholar] [CrossRef]
- Radhakrishnan, R.; Thirunavukkarasu, M.; Prabu, R.T.; Ramkumar, G.; Saravanakumar, S.; Gopalan, A.; Lahari, V.R.; Anusha, B.; Ahammad, S.H.; Rashed, A.N.Z.; et al. Pixel Reduction of High-Resolution Image Using Principal Component Analysis. J. Indian Soc. Remote Sens. 2024, 52, 315–326. [Google Scholar] [CrossRef]
- Huang, N.; Shen, Z.; Long, S.; Wu, M.L.C.; Shih, H.; Zheng, Q.; Yen, N.-C.; Tung, C.-C.; Liu, H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. London Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Peng, K.; Guo, H.; Shang, X. EEMD and Multiscale PCA-Based Signal Denoising Method and Its Application to Seismic P-Phase Arrival Picking. Sensors 2021, 21, 5271. [Google Scholar] [CrossRef]
- Liu, Y.; Ma, K.; He, H.; Gao, K. Obtaining Information about Operation of Centrifugal Compressor from Pressure by Combining EEMD and IMFE. Entropy 2020, 22, 424. [Google Scholar] [CrossRef]
- Torres, M.E.; Colominas, M.; Schlotthauer, G.; Flandrin, P. A complete ensemble empirical mode decomposition with adaptive noise. In Proceedings of the 2011 IEEE International Conference on Acoustics, Speech and Signal Processing(ICASSP), Prague, Czech Republic, 22–27 May 2011; pp. 4144–4147. [Google Scholar]
- Wang, S.; Meng, D.; Zhang, K. Study on the application of wavelet threshold denoising in the detection of coal spectra by LIBS. J. Phys. Conf. Ser. 2022, 2396, 012024. [Google Scholar] [CrossRef]
- Luo, J.; Wen, H. Research on Radar Echo Signal Noise Processing and Adaptive RLS Noise Reduction Algorithm. In Proceedings of the 2019 12th International Symposium on Computational Intelligence and Design (ISCID), Hangzhou, China, 14–15 December 2019; pp. 71–74. [Google Scholar]
- Zhao, S.; Ma, L.; Xu, L.; Liu, M.; Chen, X. A Study of Fault Signal Noise Reduction Based on Improved CEEMDAN-SVD. Appl. Sci. 2023, 13, 10713. [Google Scholar] [CrossRef]
- Zhang, J.; You, W.; Ding, Y.; Xiong, Z. Research on noise reduction of Shock wave signal based on CEEMDAN-PCA. J. Proj. Arrows Guid. 2022, 42, 24–28.31. [Google Scholar]
- Fan, C.-Y.; Li, C.-F.; Yang, S.-H.; Liu, X.-Y.; Liao, Y.-Q. Suppression of scattering clutter in underwater LiDAR based on CEEMDAN-Wavelet threshold denoising algorithm. Acta Phys. Sin. 2023, 72, 106–113. [Google Scholar] [CrossRef]
- Hou, Y.; Ren, Y. An improved wavelet threshold denoising algorithm. J. Chang. Univ. Technol. 2023, 44, 345–352. [Google Scholar]
- Clough, R.W.; Penzien, J. Dynamics of Structures; McGraw-Hill: New York, NY, USA, 1993. [Google Scholar]
- Qiao, G.; Rahmatalla, S. Dynamics of Euler-Bernoulli beams with unknown viscoelastic boundary conditions under a moving load. J. Sound Vib. 2020, 491, 115771. [Google Scholar] [CrossRef]
- Qiao, G.; Rahmatalla, S. Dynamics of interaction between an Euler-Bernoulli beam and a moving damped sprung mass: Effect of beam surface roughness. Structures 2021, 32, 2247–2265. [Google Scholar] [CrossRef]
- Gröchenig, K. Foundations of Time—Frequency Analysis; Springer Science + Business Media: New York, NY, USA, 2013. [Google Scholar]
- Pan, H.; Li, Y.; Deng, T.; Fu, J. An improved stochastic subspace identification approach for automated operational modal analysis of high-rise buildings. J. Build. Eng. 2024, 89, 109267. [Google Scholar] [CrossRef]
- Rao, S.S. Vibration of Discrete Systems; John Wiley & Sons: Hoboken, NJ, USA, 2019. [Google Scholar]
- Qiao, G.; Rahmatalla, S. Identification of the viscoelastic boundary conditions of Euler-Bernoulli beams using transmissibility. Eng. Rep. 2019, 1, e12074. [Google Scholar] [CrossRef]
- Li, Z.; Lan, Y.; Lin, W. Indirect damage detection for bridges using sensing and temporarily parked vehicles. Eng. Struct. 2023, 291, 116459. [Google Scholar] [CrossRef]
- ISO 8608:2016; Mechanical Vibration–Road Surface Profiles–Reporting of Measured Data. BSI Standards Publication: London, UK, 2016.
- Ewins, D.J. Modal Testing: Theory, Practice, and Application, 2nd ed.; Research Studies Press: Philadelphia, PA, USA, 2000. [Google Scholar]
- Qiao, G.; Rahmatalla, S. Influences of Elastic Supports on Moving Load Identification of Euler–Bernoulli Beams Using Angular Velocity. J. Vib. Acoust. 2021, 143, 041010. [Google Scholar] [CrossRef]
- Banks, H.T.; Inman, D. On damping mechanisms in beams. J. Appl. Mech. 1991, 58, 716–723. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Properties | Symbol | Value |
|---|---|---|
| Length | L | 25 m |
| Young’s modules | E | 30 Gpa |
| Width | B | 1 m |
| Height | H | 1.6 m |
| Moment of inertia | I | 0.34 m4 |
| Mass per unit length | m | 4000 kg/m |
| Properties | Symbol | Value |
|---|---|---|
| The mass of a 2-DOF vehicle | Mc | 18,000 kg |
| The moment of inertia of a 2-DOF vehicle | Ic | 55,500 kg∙m2 |
| Wheelbase | Lc | 3 m |
| Ratio to gravity center for the front axle | aF | 0.65 |
| Ratio to gravity center for the rear axle | aR | 0.35 |
| The spring of the front axle | kF | 2.0 × 106 N/m |
| The dashpot of the front axle | cF | 1.0 × 104 Ns/m |
| The spring of the rear axle | kR | 5.0 × 106 N/m |
| The dashpot of the rear axle | cR | 2.0 × 104 Ns/m |
| The mass of the 1-DOF vehicle | m1 = m2 = m3 | 1000 kg |
| The spring of the 1-DOF vehicle | k1 = k2 = k3 | 5.0 × 104 N/m |
| The dashpot of the 1-DOF vehicle | c1 = c2 = c3 | 4.0 × 103 Ns/m |
| Case 1 | Case 2 | Case 3 | Case 4 | Case 5 | Case 6 | |
|---|---|---|---|---|---|---|
| re (kg∙m3/s) | 0 | 0 | 0 | 400 | 2000 | 4000 |
| ri (kg∙m3/s) | 1.0240 × 106 | 3.0720 × 106 | 8.1920 × 106 | 1.0240 × 106 | 1.0240 × 106 | 1.0240 × 106 |
| The first three damping ratios (ξ1, ξ2, and ξ3) | 0.0013 0.0051 0.0114 | 0.0038 0.0152 0.0341 | 0.0101 0.0404 0.0910 | 0.0032 0.0055 0.0116 | 0.0112 0.0075 0.0125 | 0.0211 0.0100 0.0136 |
| SNR | MSE | |||||||
|---|---|---|---|---|---|---|---|---|
| Signals | Δü1,2 | Δü2,3 | Δu1,2 | Δu2,3 | Δü1,2 | Δü2,3 | Δu1,2 | Δu2,3 |
| Noise contaminated | 19.719 | 19.900 | 19.789 | 20.219 | 3.548 × 10−5 | 45.86 × 10−6 | 2.749 × 10−9 | 7.237 × 10−9 |
| CEEMDAN-PCA | −28.269 | −27.051 | −68.644 | −63.907 | 2.234 | 2.255 | 1.887 | 1.830 |
| CEEMDAN-NSPCA | 24.361 | 28.842 | 22.201 | 27.014 | 1.219 × 10−5 | 14.579 × 10−6 | 1.553 × 10−9 | 1.480 × 10−9 |
| Index | SNR | MSE | ||||||
|---|---|---|---|---|---|---|---|---|
| Signals | Δü1,2 | Δü2,3 | Δu1,2 | Δu2,3 | Δü1,2 (×10−5) | Δü2,3 (×10−6) | Δu1,2 (×10−9) | Δu2,3 (×10−9) |
| Noise contaminated | 19.719 | 19.900 | 19.789 | 20.219 | 3.548 | 4.586 | 2.749 | 7.237 |
| IWT | 19.877 | 19.48 | 19.860 | 20.249 | 3.422 | 4.499 | 2.663 | 7.029 |
| CEEMDAN-RSWT | 25.695 | 26.666 | 27.566 | 28.821 | 0.897 | 0.958 | 4.516 | 9.766 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiao, G.; Du, X.; Wang, Q.; Jiang, L. Mode Shape Extraction with Denoising Techniques Using Residual Responses of Contact Points of Moving Vehicles on a Beam Bridge. Appl. Sci. 2025, 15, 7059. https://doi.org/10.3390/app15137059
Qiao G, Du X, Wang Q, Jiang L. Mode Shape Extraction with Denoising Techniques Using Residual Responses of Contact Points of Moving Vehicles on a Beam Bridge. Applied Sciences. 2025; 15(13):7059. https://doi.org/10.3390/app15137059
Chicago/Turabian StyleQiao, Guandong, Xiaoyue Du, Qi Wang, and Liu Jiang. 2025. "Mode Shape Extraction with Denoising Techniques Using Residual Responses of Contact Points of Moving Vehicles on a Beam Bridge" Applied Sciences 15, no. 13: 7059. https://doi.org/10.3390/app15137059
APA StyleQiao, G., Du, X., Wang, Q., & Jiang, L. (2025). Mode Shape Extraction with Denoising Techniques Using Residual Responses of Contact Points of Moving Vehicles on a Beam Bridge. Applied Sciences, 15(13), 7059. https://doi.org/10.3390/app15137059