Design of Constant Speed Controller for Hydraulic Retarder Based on Robust Control


Abstract
1. Introduction
- Boundary layer saturation function method [23], which achieves smooth transition in the neighborhood of the sliding mode surface by replacing the sign function with a continuous saturation function, but needs to trade off between the steady-state error and the smoothness.
- Higher-order sliding mode control [24], which fundamentally eliminates jitter by transferring the discontinuous terms to higher-order derivatives through differentiation of the sliding mode surface, but the computational complexity increases significantly.
- Perturbation observer compensation method [25], which reduces the switching gain requirement by estimating the perturbation through feed-forward compensation.
2. Dynamic Model of Vehicle Driving Downhill
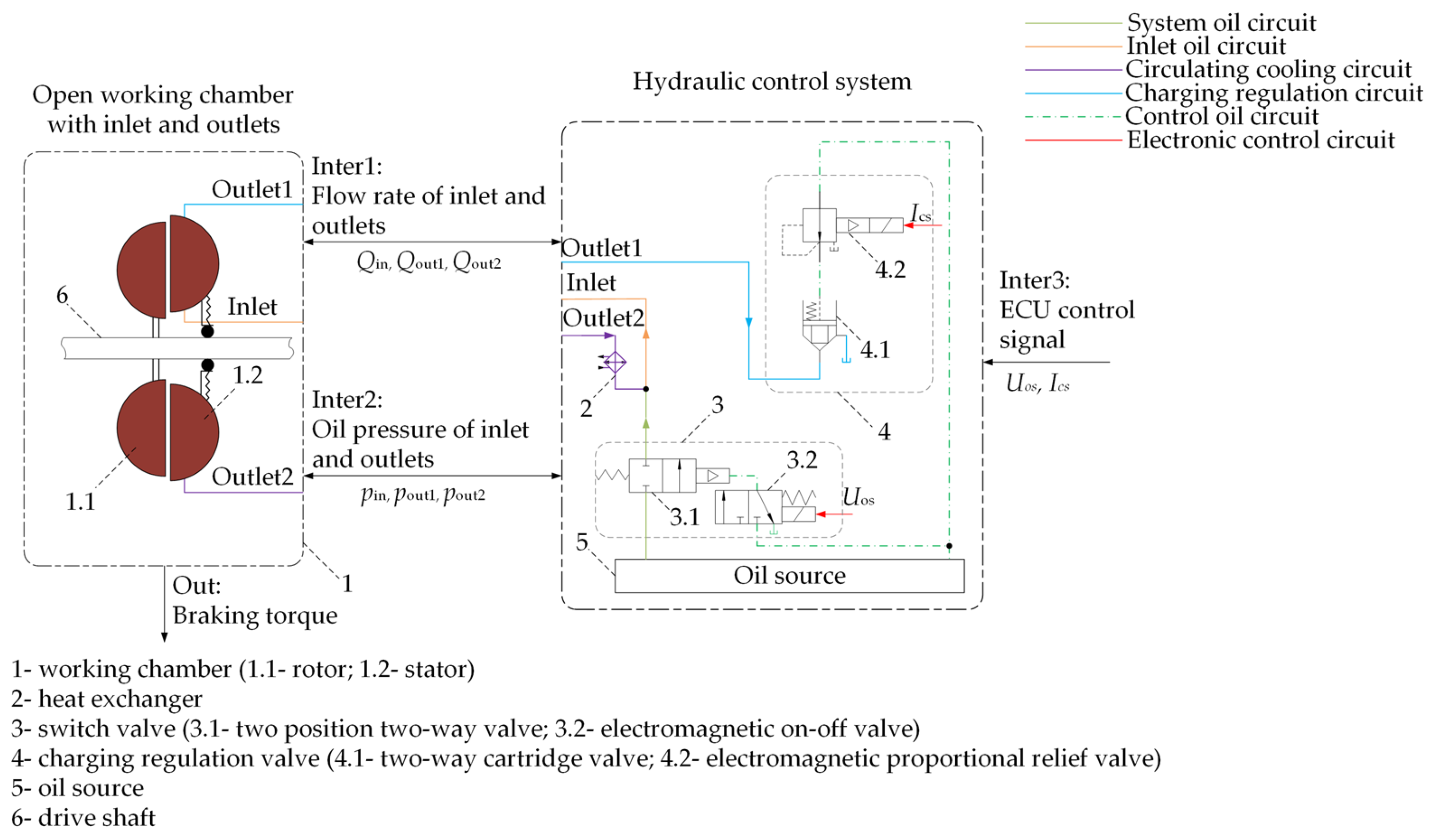
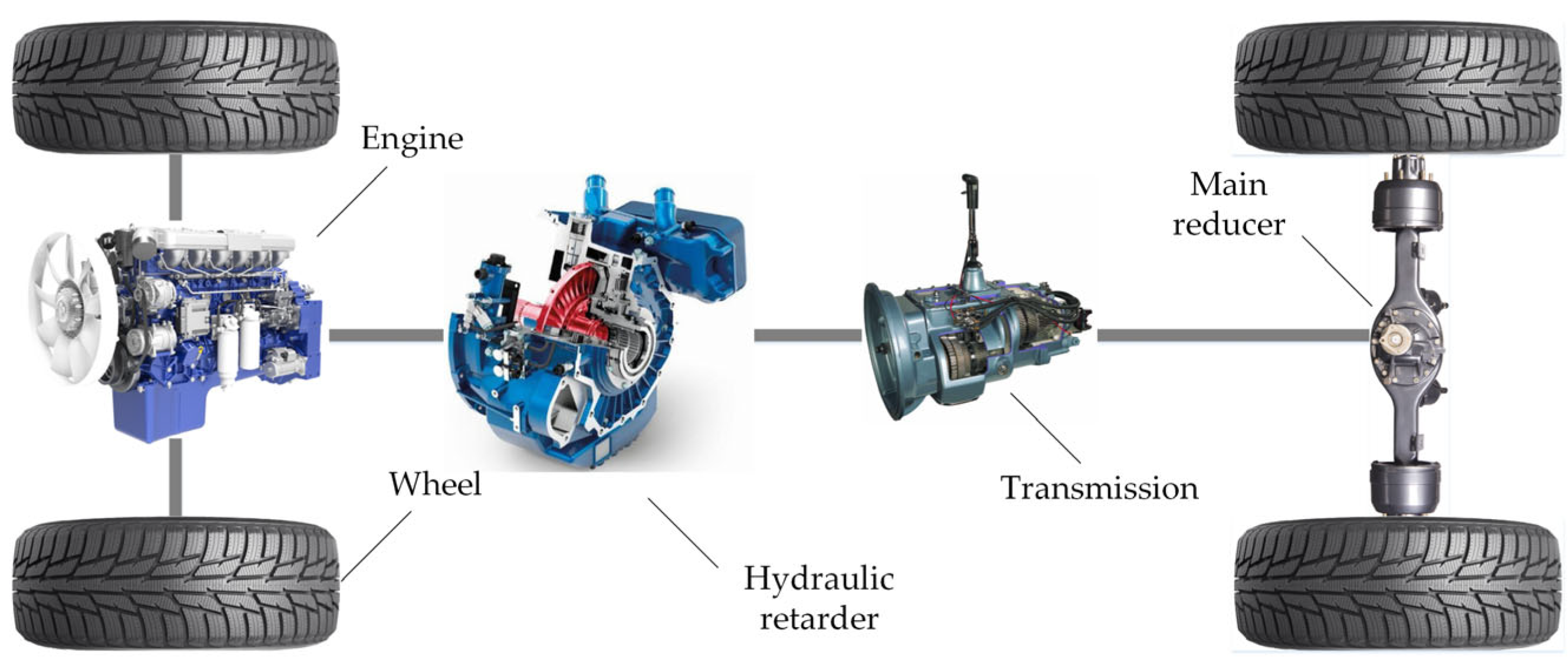
2.1. Hydraulic Retarder Model
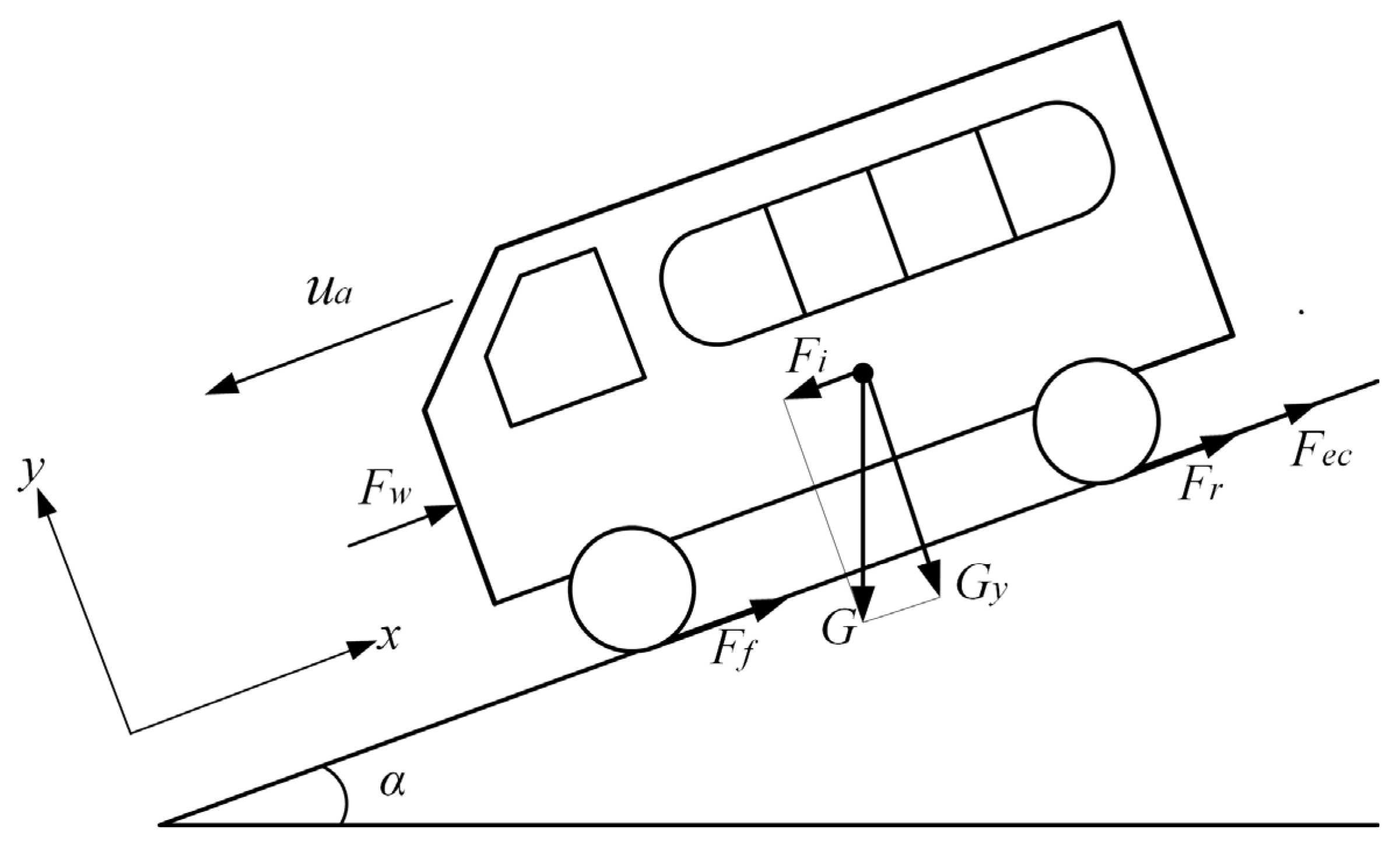
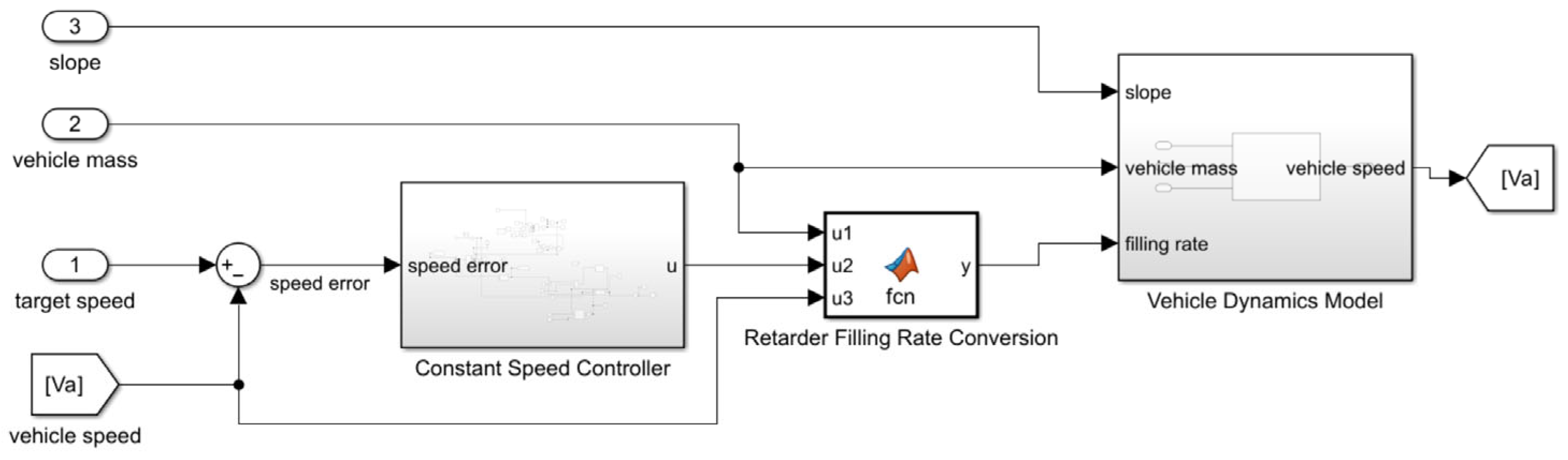
2.2. Vehicle Dynamics Model
3. Controller Design
- (1)
- The use of saturation function to suppress sliding mode chattering refers to the use of saturation function to replace the sign function in the control system and the use of saturation function continuity to achieve the purpose of weakening the sliding mode control system chattering [23]. The saturation function employed in this study is expressed as follows:
- (2)
- The high-frequency robust controller is based on the sliding mode controller for the optimization of the upper and lower limits of the positive and negative value switching of the controller, by adding a real number greater than 0 to the denominator of the auxiliary term of the controller, it makes the input switching of the high-frequency robust controller smoother and reduces the degree of switching intensity.
4. Simulation Results and Analysis
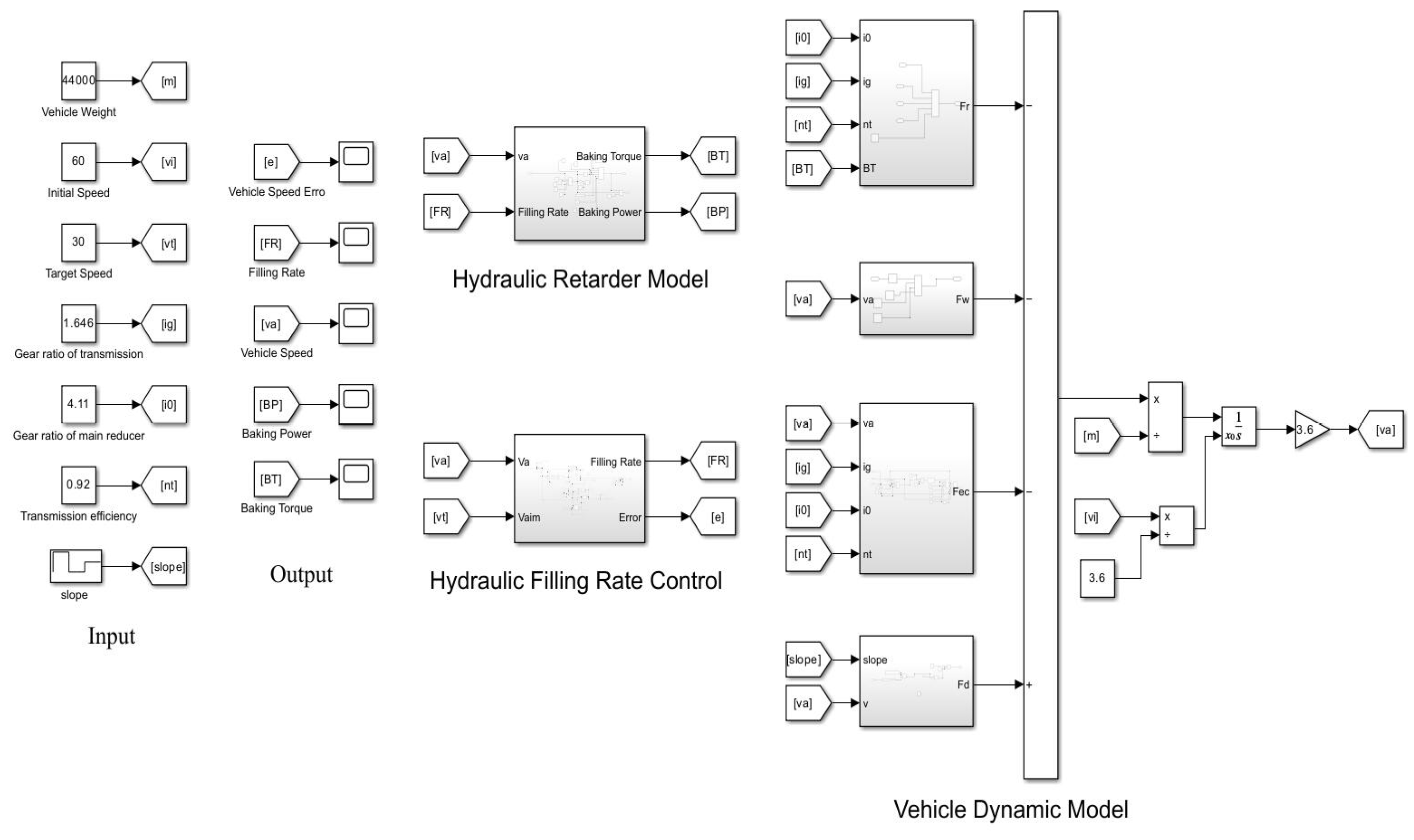
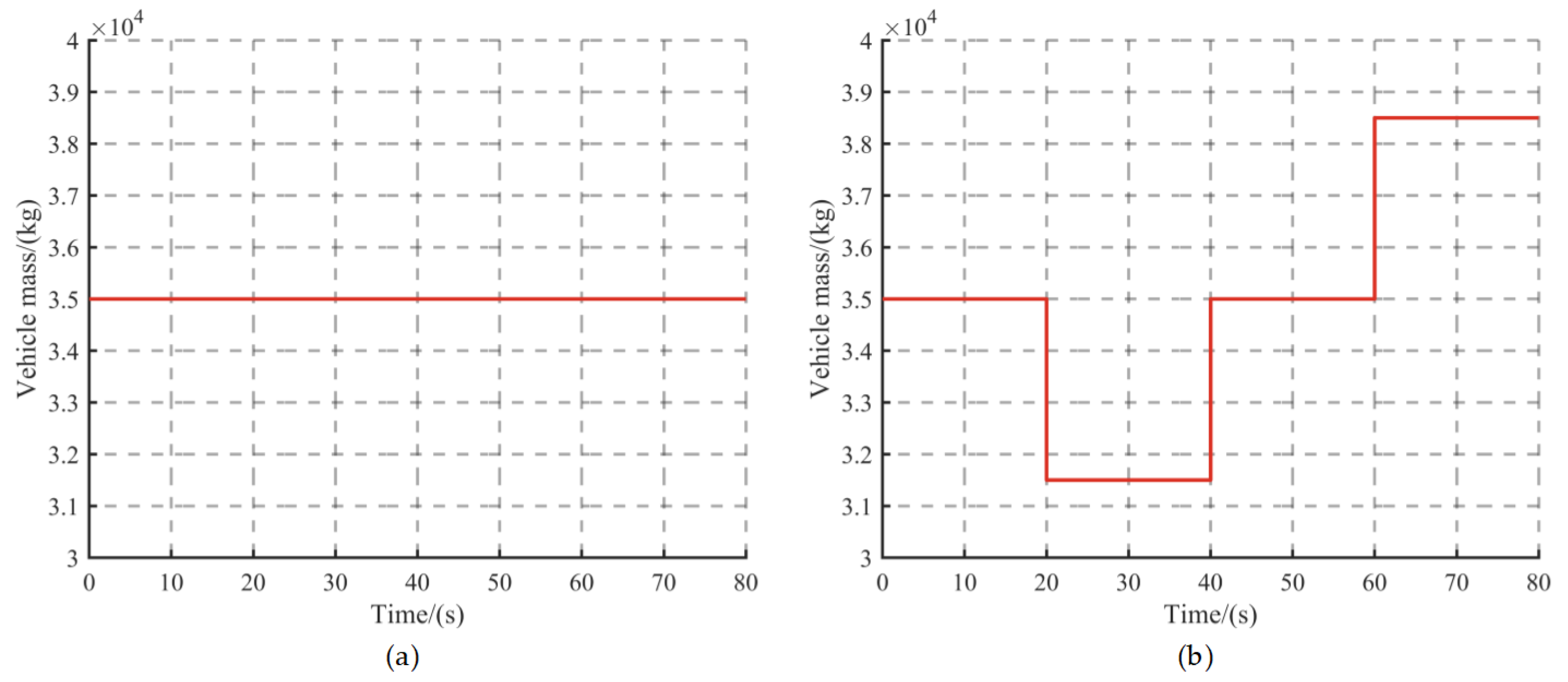
4.1. Heavy-Duty Vehicle Simulation Conditions
4.2. Simulation Results
5. Conclusions
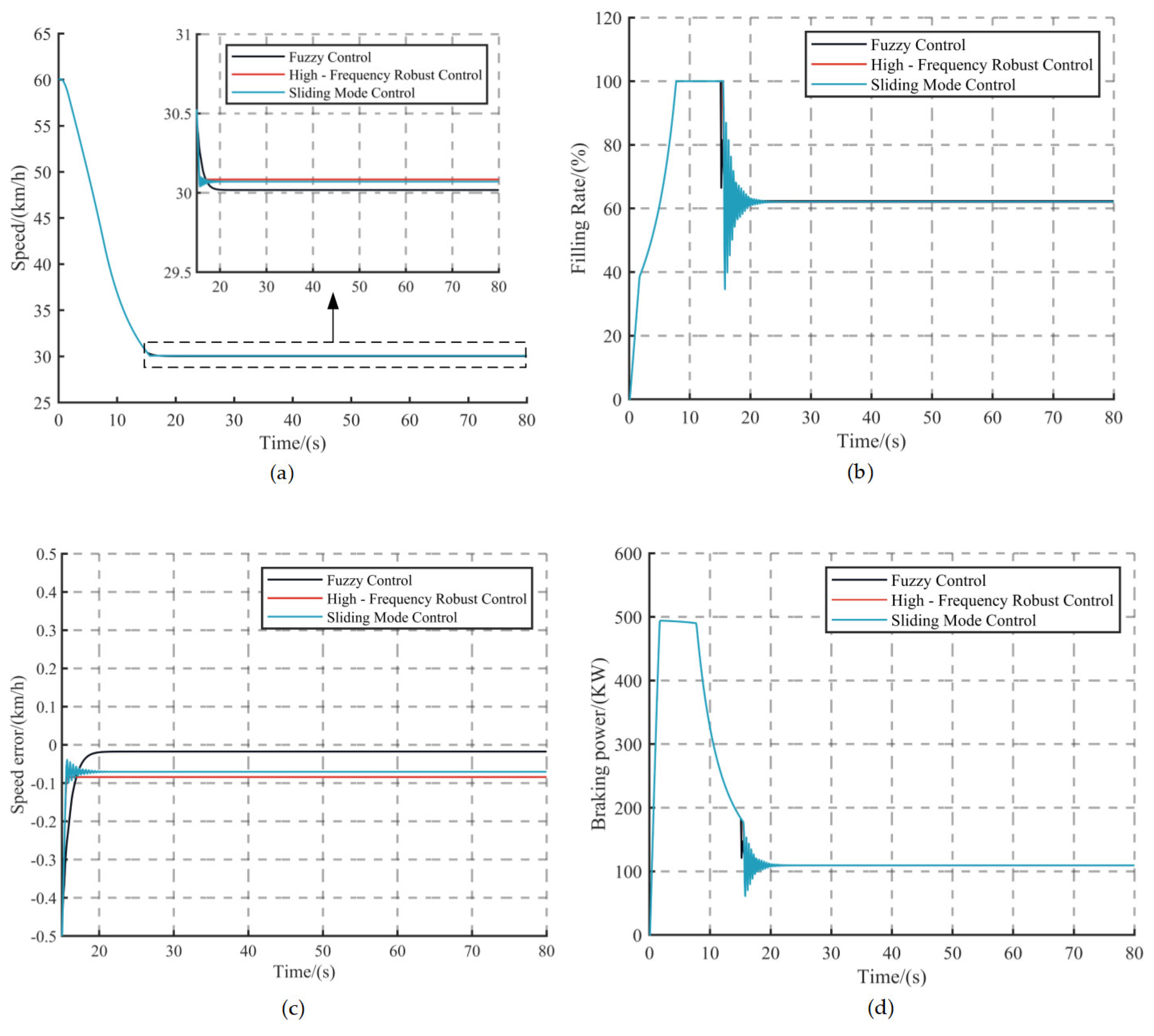
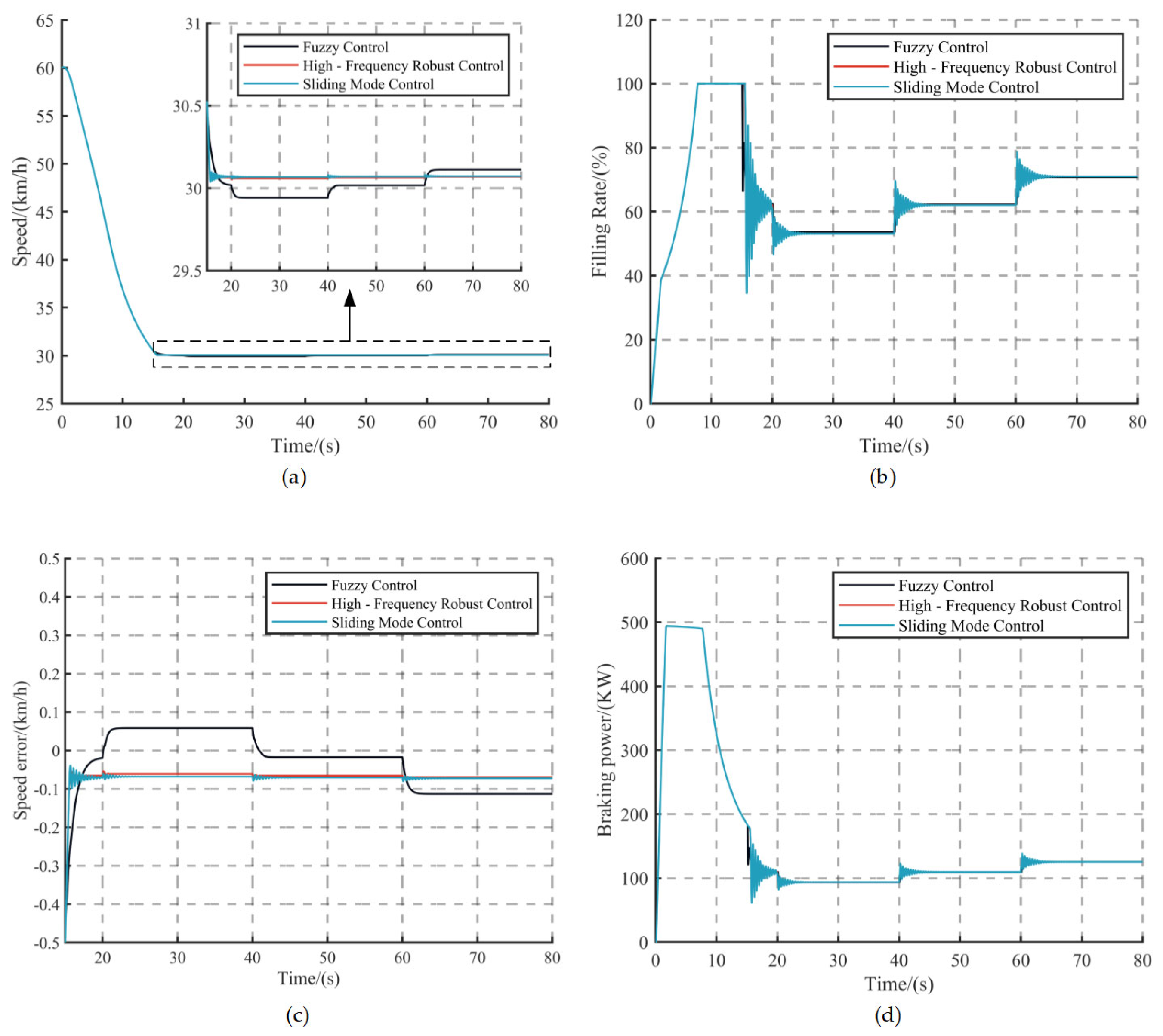
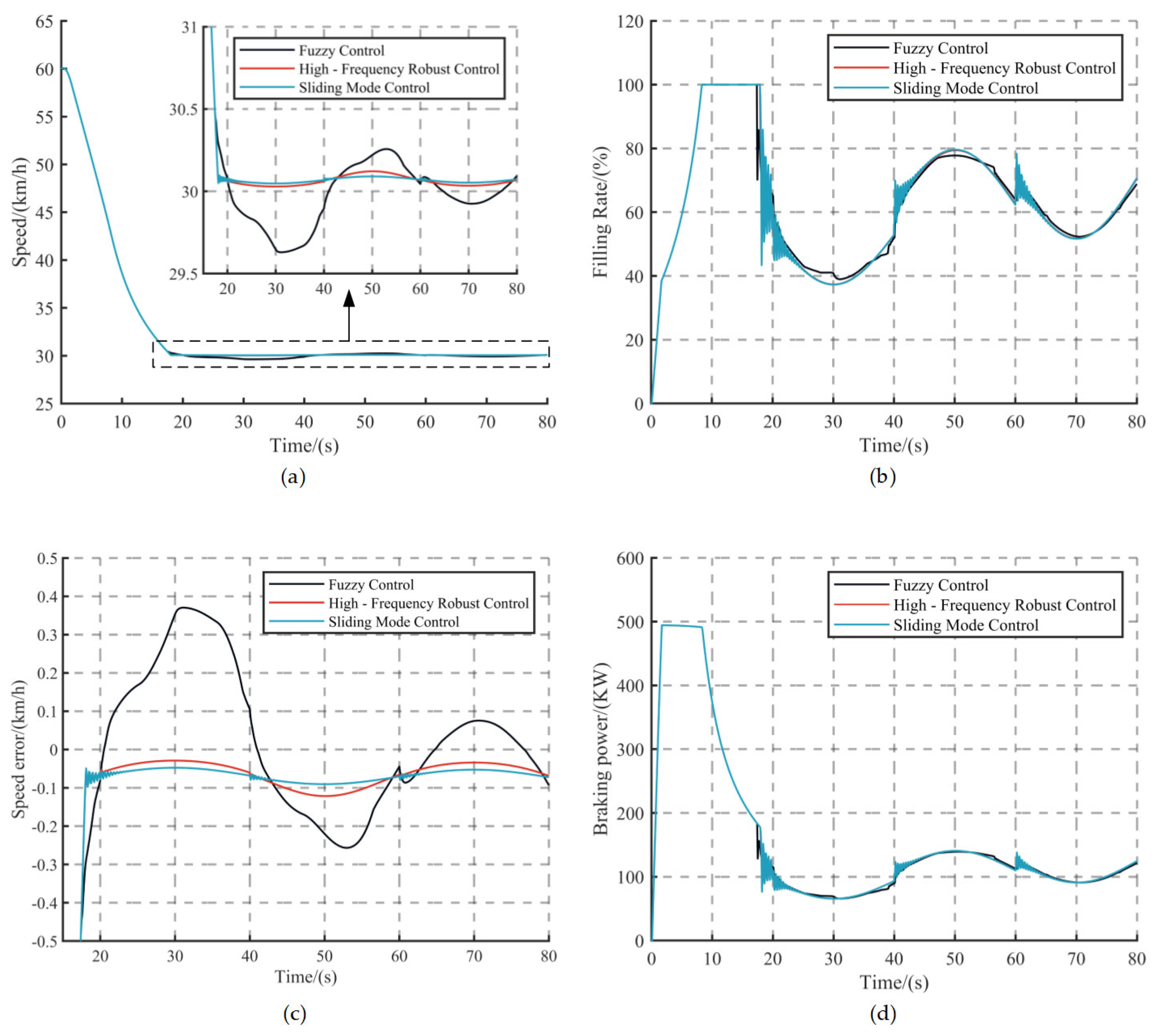
- When the heavy-duty vehicle with constant mass is driving on a ramp with a fixed gradient of 6%, the fuzzy controller demonstrates high speed control accuracy with a maximum speed error of 0.0842 km/h. However, when the system is subject to parameter uncertainty, especially when the vehicle mass and the road gradient vary at the same time, the fuzzy controller has a long response time, and the maximum speed error grows to 0.37 km/h, with speed control accuracy that is low. At the same time, the retarder filling rate of the control output also swings to varying degrees. This is owing to the fact that the fuzzy controller relies on empirical and heuristic principles, has weak adaptability to non-matching disturbances, and has a considerable difference in anti-interference characteristics compared with the other two controllers under dynamic settings.
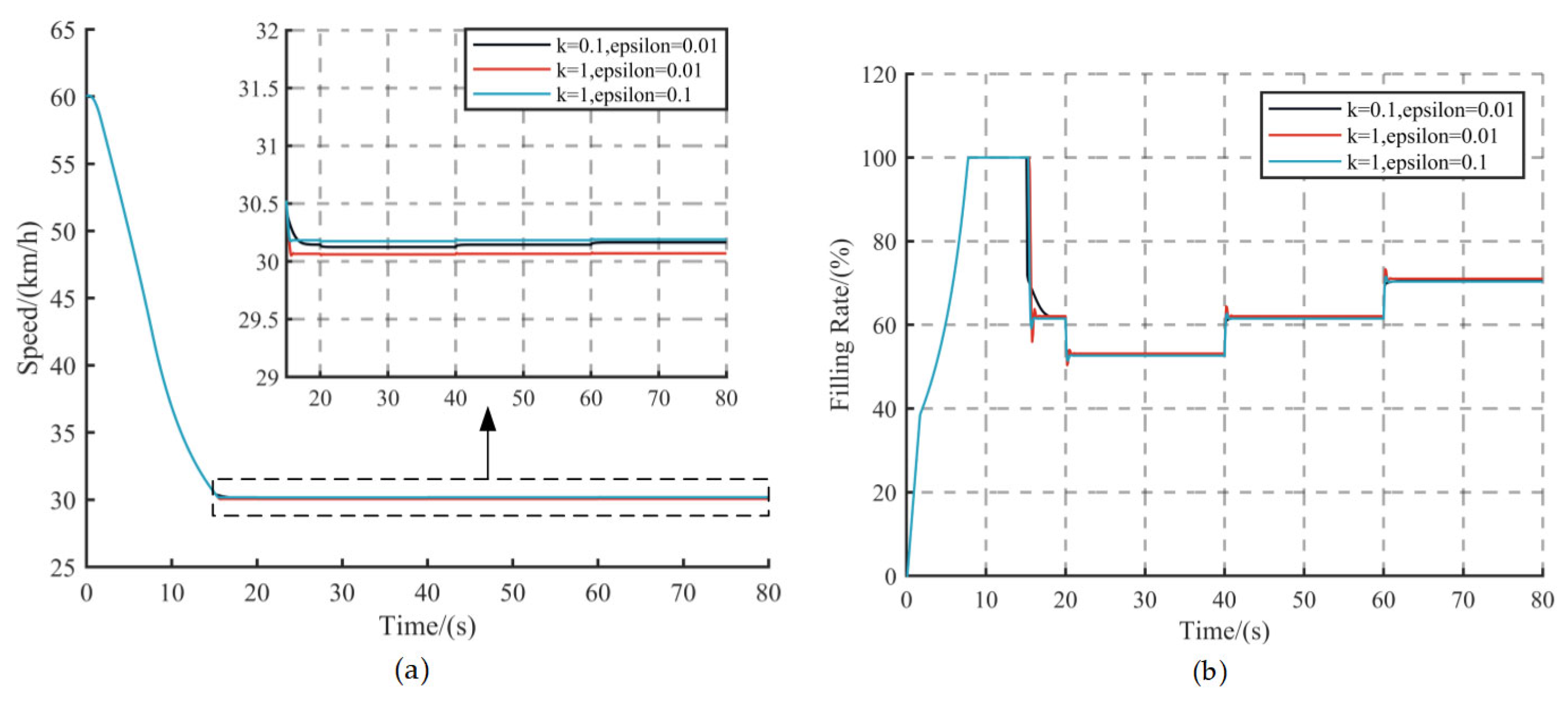
- The sliding mode controller with saturation function shows good speed tracking performance under three simulation conditions, but its control output retarder filling rate signal produces obvious vibration when the vehicle speed reaches near the target speed or the system parameter changes, which is not conducive to the regulation of the hydraulic retarder filling rate in reality. Through simulation analysis, we find that although the saturation function can suppress part of the vibration in traditional sliding mode control, the selection of the boundary layer thickness is more dependent on the system model, and if the value of the boundary layer thickness is too large, it reduces the robustness of the sliding mode control with the saturation function, and if the value of the boundary layer thickness is too small, it increases to increase the degree of vibration in the control output.
- The high-frequency controller has good robustness in the presence of dynamic disturbances in the system. When the vehicle mass and road gradient change, the high-frequency controller speed fluctuation is small; the root mean square error of speed is 0.0683 km/h, compared with the fuzzy controller’s root mean square error of speed of as high as 0.184 km/h. The high-frequency controller under dynamic conditions of interference resistance has better performance. In terms of control output, the high-frequency controller, compared with the sliding mode controller with saturation function, has less fluctuation of the output filling rate when the system parameters are changing and is able to suppress chattering while maintaining strong robustness against perturbation and parameter uncertainty.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| e | ||||||||
|---|---|---|---|---|---|---|---|---|
| PB | PM | PS | ZO | NS | NM | NB | ||
| ec | PB | PB | PB | PB | PM | PM | PS | PS |
| PM | PB | PB | PM | PS | PS | ZO | ZO | |
| PS | PM | PM | PS | PS | ZO | ZO | NS | |
| ZO | PM | PS | PS | ZO | NS | NS | NM | |
| NS | PS | PS | ZO | NS | NS | NM | NB | |
| NM | ZO | ZO | NS | NS | NM | NB | NB | |
| NB | NS | NS | NM | NM | NB | NB | NB | |
References
- Tian, J.; Li, D.; Ye, L. Study on braking characteristics of a novel eddy current-hydraulic hybrid retarder for heavy-duty vehicles. IEEE Trans. Energy Convers. 2020, 35, 1658–1666. [Google Scholar] [CrossRef]
- Wang, Z.; Wei, W.; Chen, X.; Langari, R.; Yan, Q. Comprehensive Evaluation of Hydrodynamic Retarders with Fuzzy Analytic Hierarchy Process and Improved Radar Chart. Machines 2023, 11, 849. [Google Scholar] [CrossRef]
- Xu, M.; Li, H.Y. Research on constant torque control system design for hydraulic retarder of heavy vehicle. Adv. Mater. Res. 2012, 538, 2493–2499. [Google Scholar] [CrossRef]
- Gao, Z.; Li, D.; Tian, J.; Ning, K.; Ye, L. Design and performance analysis of a novel radially distributed electrom-agnetic-hydraulic retarder for heavy vehicles. IEEE Trans. Energy Convers. 2021, 37, 892–900. [Google Scholar] [CrossRef]
- Ding, Z.; Zhou, L.; Xu, J.; Tong, J. Vehicle Retarders: A Review. IEEE Access 2023, 11, 102757–102767. [Google Scholar] [CrossRef]
- Tan, K.K.; Putra, A.S. Servo Hydraulic and Pneumatic Drive. In Drives and Control for Industrial Automation; Springer: London, UK, 2011; pp. 9–44. [Google Scholar]
- Zhang, K.; Shang, H.; Xu, J.; Niu, J.; Yue, Y. Testing and performance analysis of an integrated electromagnetic and hydraulic retarder for heavy-duty vehicles. Eng. Appl. Artif. Intell. 2023, 126, 106906. [Google Scholar] [CrossRef]
- Xue, M.; Fu, Y.; Geng, X.; Sun, S.; Lei, Y. Integration analysis model of oil-charging system about parallel hydraulic retarder and its response characteristic. Eng. Sci. Technol. Int. J. 2024, 53, 101685. [Google Scholar] [CrossRef]
- Wu, C.; Guo, X.; Yang, B.; Pei, X.; Guo, S. Hydraulic retarder torque control for heavy duty vehicle longitudinal control. Int. J. Heavy Veh. Syst. 2019, 26, 854–871. [Google Scholar] [CrossRef]
- Mu, H.; Fu, J.; Wu, Z.; Zhu, Y.; Wei, W.; Yan, Q. Optimization on parallel control of PID and fuzzy in constant-speed braking process with a hydrodynamic retarder. In Proceedings of the 2019 IEEE 8th International Conference on Fluid Power and mechatronics (FPM), Wuhan, China, 10–13 April 2019; pp. 1175–1188. [Google Scholar]
- Huang, J.; Li, C.; Ling, Z.; Chen, Y.; Ma, X. Study on Pivotal Factors to Breaking Torque of Hydrodynamic Retarder. In ICLEM 2010: Logistics for Sustained Economic Development: Infrastructure, Information, Integration; Asce: Reston, VA, USA, 2010; pp. 1353–1360. [Google Scholar]
- Yan, J.; Guo, X.; Tan, G.; Yang, T.; Zhou, D. Co-Simulation Based Hydraulic Retarder Braking Control System; 0148-7191 SAE Technical Paper; SAE: Warrendale, PA, USA, 2009. [Google Scholar]
- Zhang, Y. Experimental analysis of heavy vehicle hydraulic retarder during downhill driving. Int. J. Veh. Struct. Syst. 2019, 11, 393–399. [Google Scholar] [CrossRef]
- Mu, H.; Yan, Q.; Wei, W. Study on influence of inlet and outlet flow rates on oil pressures and braking torque in a hydrodynamic retarder. Int. J. Numer. Methods Heat Fluid Flow 2017, 27, 2544–2564. [Google Scholar] [CrossRef]
- Mu, H.; Wei, W.; Kong, L.; Zhao, Y.; Yan, Q. Braking characteristics integrating open working chamber model and hydraulic control system model in a hydrodynamic retarder. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 1952–1971. [Google Scholar] [CrossRef]
- Wei, W.; Tao, T.L.; Chen, X.Q.; Xie, W.H.; Wang, Z.; Yan, Q.D. Research on Braking Performance Prediction and Torque Control of Hydrodynamic Retarder Considering Temperature. In Proceedings of the 2023 9th International Conference on Fluid Power and Mechatronics (FPM), Lanzhou, China, 18–21 August 2023; pp. 1–11. [Google Scholar]
- Zheng, H.; Lei, Y.; Song, P. Designing the main controller of auxiliary braking systems for heavy-duty vehicles in nonemergency braking conditions. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 232, 1605–1615. [Google Scholar] [CrossRef]
- Li, L.; Ma, W.X.; Cai, W.; Chu, Y.X.; Song, J.J.; Zhang, Y. Control system analysis of hydrodynamic retarder of heavy truck. Adv. Mater. Res. 2013, 619, 406–409. [Google Scholar] [CrossRef]
- Liu, Z.; Zheng, H.; Xu, W.; Yu, Z. A Downhill Brake Strategy Focusing on Temperature and Wear Loss Control of Brake Systems; 0148-7191 SAE Technical Paper; SAE: Warrendale, PA, USA, 2013. [Google Scholar]
- Lei, Y.; Song, P.; Zheng, H.; Fu, Y.; Li, X.; Song, B. Application of fuzzy logic in constant speed control of hydraulic retarder. Adv. Mech. Eng. 2017, 9, 1687814017690956. [Google Scholar] [CrossRef]
- Li, J.; Cai, Z.; Jia, Z. Simulation of constant speed control on coach hydraulic retarder on special weather condition. Syst. Simul. 2014, 26, 2765–2769. [Google Scholar] [CrossRef]
- Chen, X.; Ao, K.; Liu, X.; Zhang, Q. Simulation research on vehicle with hydraulic retarder constant speed control strategy. Mach. Tool Hydraul. 2019, 47, 160–165. [Google Scholar] [CrossRef]
- Cheng, N.B.; Guan, L.W.; Wang, L.P.; Han, J. Chattering reduction of sliding mode control by adopting nonlinear saturation function. Adv. Mater. Res. 2011, 143, 53–61. [Google Scholar] [CrossRef]
- Laghrouche, S.; Plestan, F.; Glumineau, A. Higher order sliding mode control based on integral sliding mode. Automatica 2007, 43, 531–537. [Google Scholar] [CrossRef]
- Chen, W.H.; Yang, J.; Guo, L.; Li, S. Disturbance-observer-based control and related methods—An overview. IEEE Trans-Actions Ind. Electron. 2015, 63, 1083–1095. [Google Scholar] [CrossRef]
- Zheng, H.; Lei, Y.; Song, P. Design of a filling ratio observer for a hydraulic retarder: An analysis of vehicle thermal management and dynamic braking system. Adv. Mech. Eng. 2016, 8, 1687814016674098. [Google Scholar] [CrossRef]
- Yan, Q.D.; Zou, B.; Wei, W. Research on braking performance calculation model of two-phase flow in hydraulic retarder cascade. Beijing Ligong Daxue Xuebao Trans. Beijing Inst. Technol. 2011, 31, 1396–1400. [Google Scholar]
- Utkin, V.I. Sliding Modes in Control and Optimization; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]



| Parameter | Value |
|---|---|
| Initial vehicle velocity | 60 km/h |
| Target vehicle velocity | 30 km/h |
| Aerodynamic resistance coefficient | 0.65 |
| Windward area | 5 m2 |
| Density of fluid medium | 860 kg/m3 |
| Gear ratio of transmission | 1.646 |
| Gear ratio of main reducer | 4.111 |
| Wheel radius | 0.554 m |
| Simulation step | 0.1 s |
| Mass | M1 | M2 | |
|---|---|---|---|
| Slope | |||
| S1 | C1 | C2 | |
| S2 | \ | C3 | |
| RMSE | Max | |
|---|---|---|
| = 0.1, = 0.01 | 0.145 | 0.165 |
| = 1, = 0.01 | 0.0652 | 0.0749 |
| = 1, = 0.1 | 0.182 | 0.194 |
| C1 (km/h) | C2 (km/h) | C3 (km/h) | ||||
|---|---|---|---|---|---|---|
| Fuzzy control | RMSE | Max | RMSE | Max | RMSE | Max |
| 0.0176 | 0.0195 | 0.0729 | 0.113 | 0.184 | 0.370 | |
| High-frequency | RMSE | Max | RMSE | Max | RMSE | Max |
| 0.0841 | 0.0842 | 0.0652 | 0.0679 | 0.0683 | 0.122 | |
| Sliding mode | RMSE | Max | RMSE | Max | RMSE | Max |
| 0.0704 | 0.0716 | 0.0703 | 0.0790 | 0.0674 | 0.0905 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, P.; Meng, A.; Ding, Y. Design of Constant Speed Controller for Hydraulic Retarder Based on Robust Control. Appl. Sci. 2025, 15, 7058. https://doi.org/10.3390/app15137058
Song P, Meng A, Ding Y. Design of Constant Speed Controller for Hydraulic Retarder Based on Robust Control. Applied Sciences. 2025; 15(13):7058. https://doi.org/10.3390/app15137058
Chicago/Turabian StyleSong, Pengxiang, Ao Meng, and Yang Ding. 2025. "Design of Constant Speed Controller for Hydraulic Retarder Based on Robust Control" Applied Sciences 15, no. 13: 7058. https://doi.org/10.3390/app15137058
APA StyleSong, P., Meng, A., & Ding, Y. (2025). Design of Constant Speed Controller for Hydraulic Retarder Based on Robust Control. Applied Sciences, 15(13), 7058. https://doi.org/10.3390/app15137058