
Minimum Critical Test Scenario Set Selection for Autonomous Vehicles Prior to First Deployment and Public Road Testing



Abstract
Featured Application
Abstract
1. Introduction
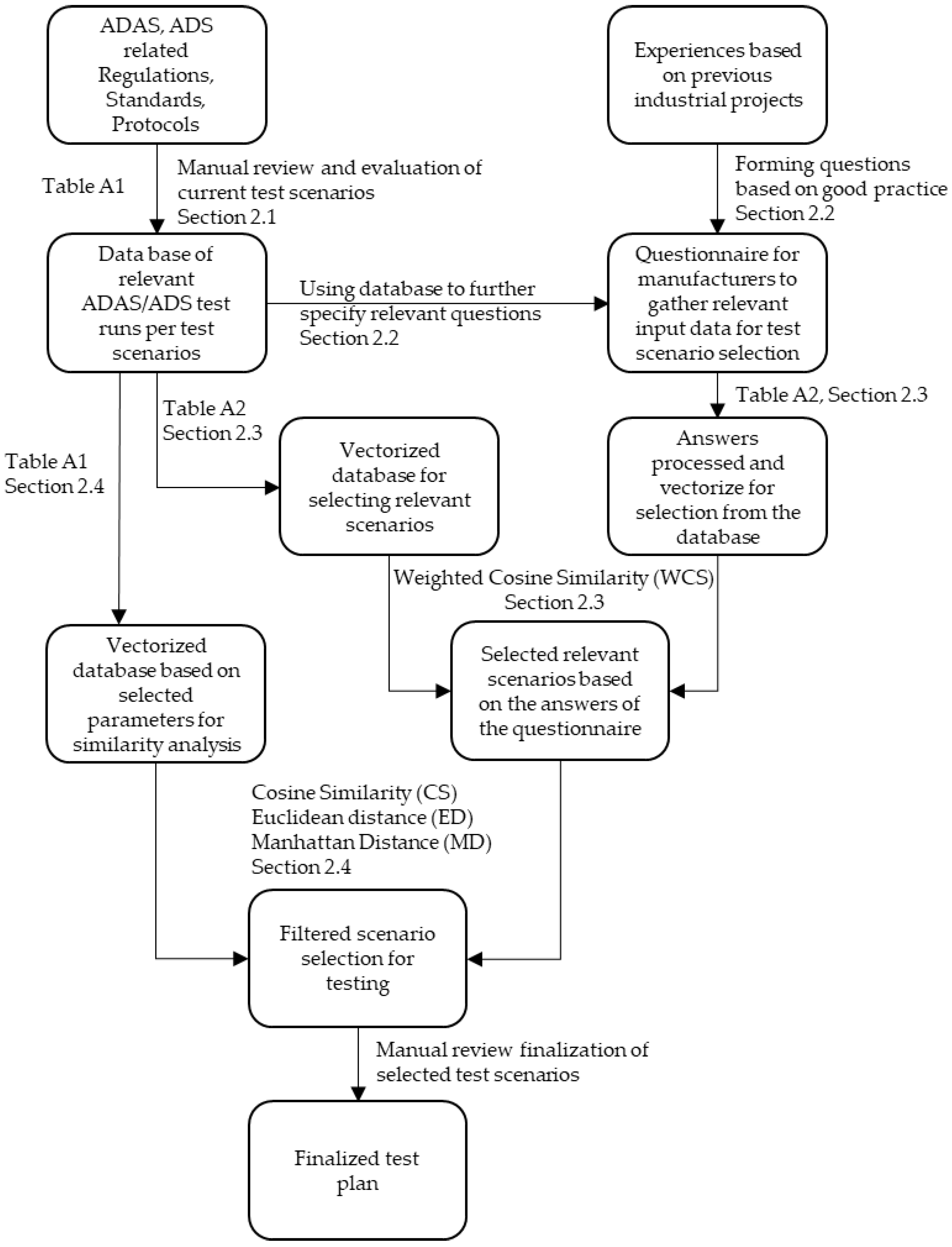
2. Materials and Methods
2.1. Review and Evaluation of Current Test Scenarios to Develop a Comprehensive Test Run Database
2.2. Developing an Initial Questionnaire for Vehicle Developers to Aid in Selecting Test Scenarios
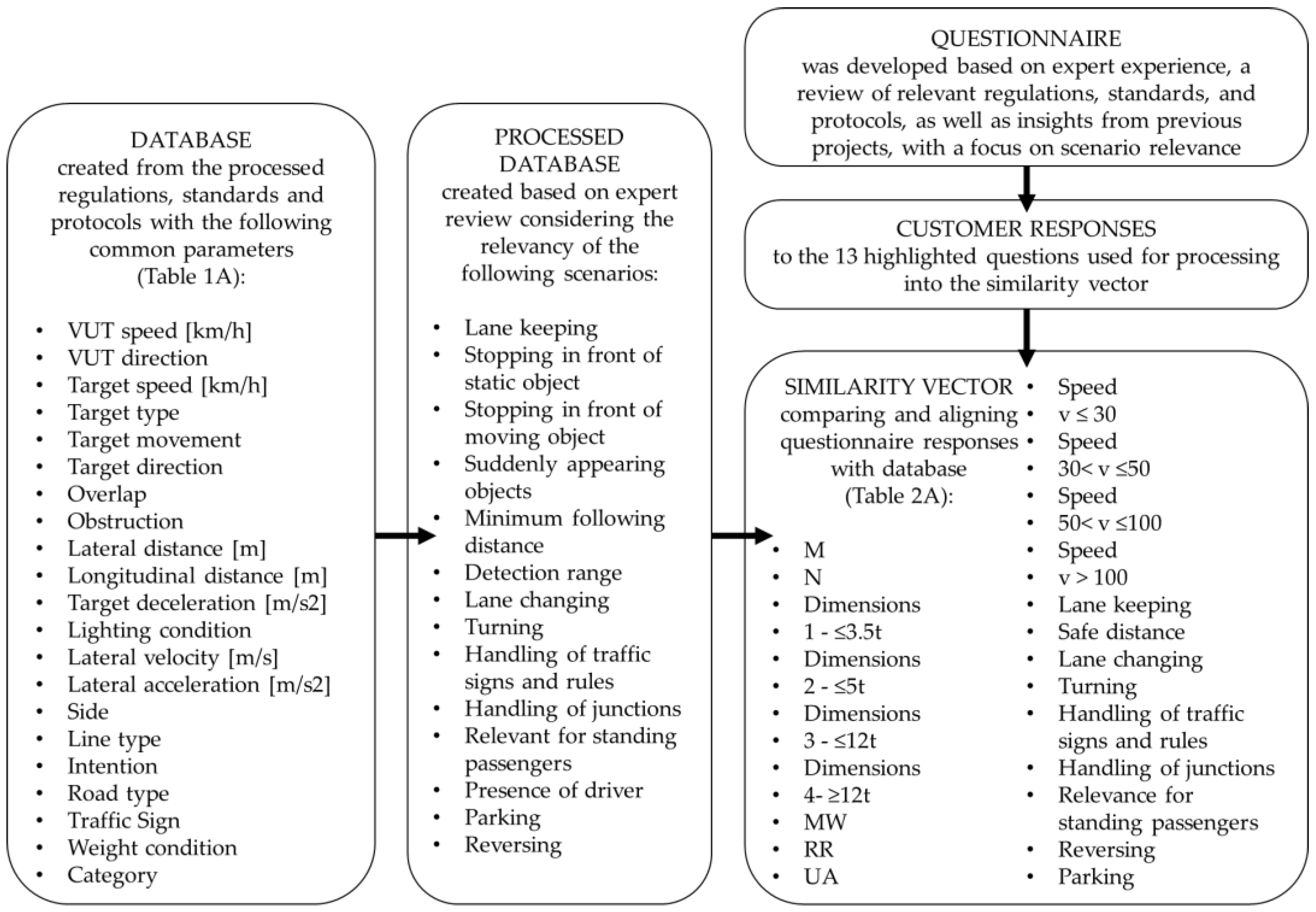
2.3. Defining Comparison Parameters: Aligning Questionnaire Responses with Database
- Purpose (category of M or N);
- Dimension (1—≤3.5 t; 2—≤5 t; 3—≤12 t; 4—≥12 t);
- Target ODD (motorway (MW), rural road (RR), urban area (UA));
- Speed groups (1—v ≤ 30 km/h; 2—30 < v ≤ 50 km/h; 3—50 < v ≤ 100 km/h; 4—v > 100 km/h);
- Lane keeping;
- Stopping in front of static objects;
- Stopping in front of moving objects;
- Suddenly appearing objects;
- Minimum following distance;
- Detection range;
- Lane changing;
- Turning;
- Handling of traffic signs and rules;
- Handling of junctions;
- Relevance for standing passengers;
- Presence of driver;
- Parking;
- Reversing.
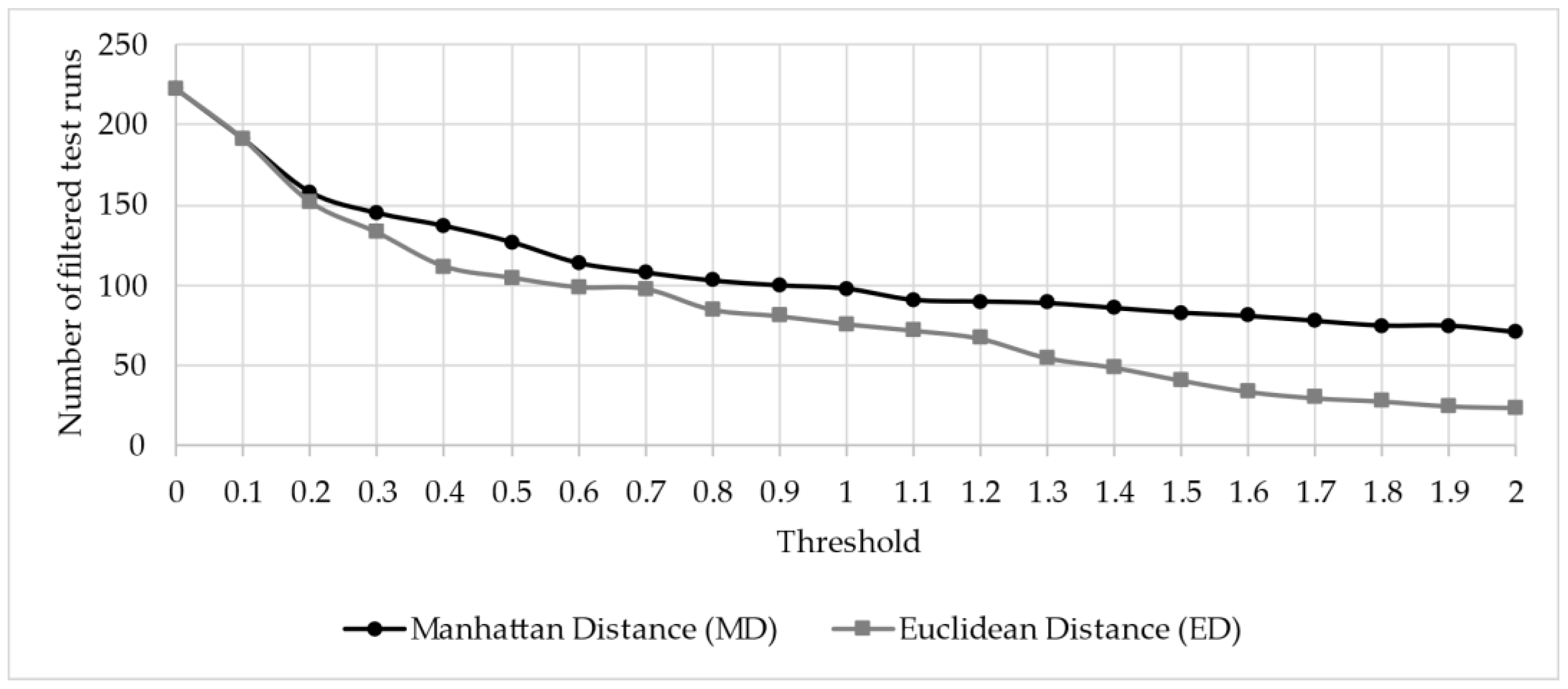
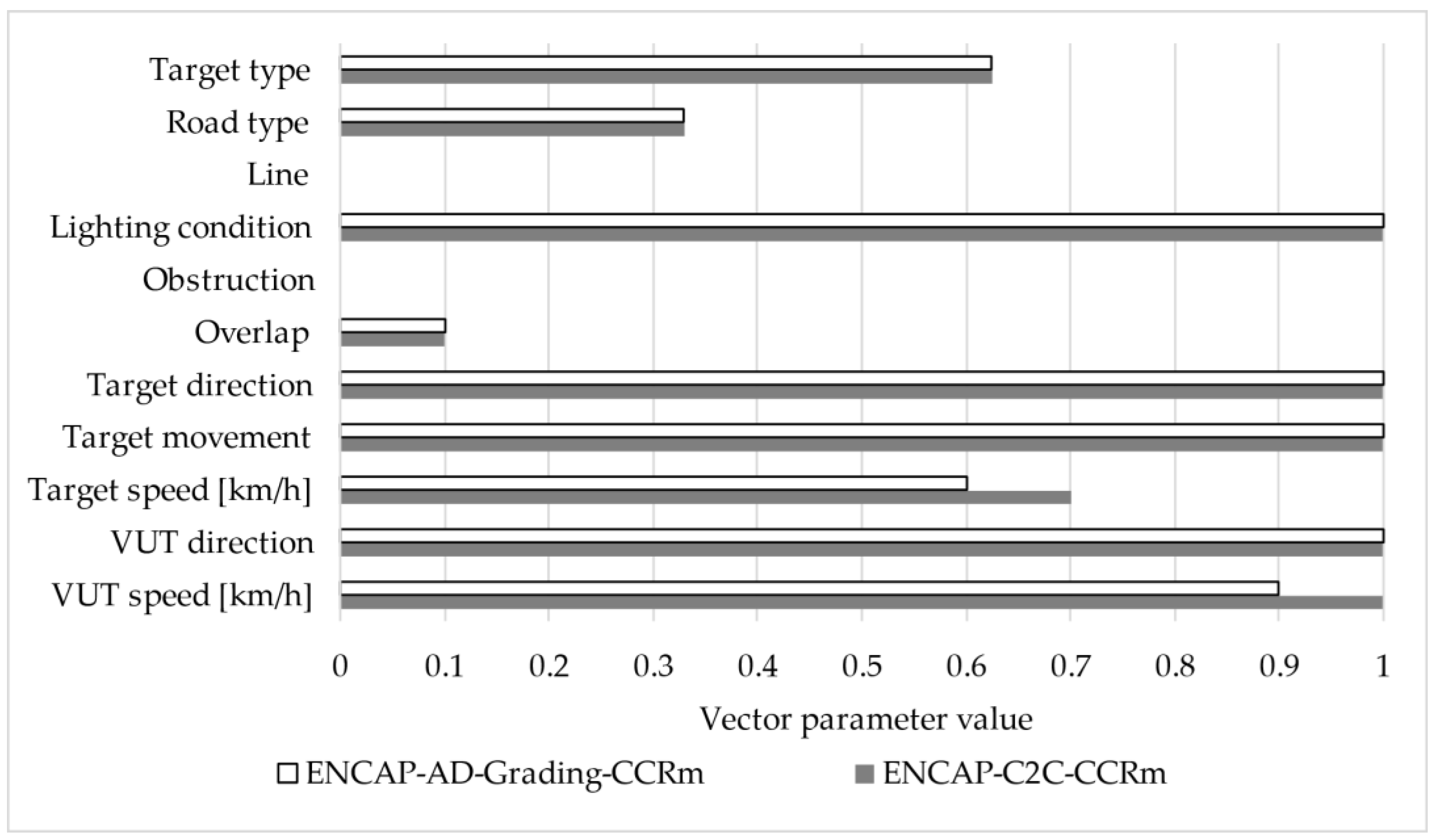
2.4. Parameter Selection for Effective Filtering of Similar Test Runs
- VUT speed [km/h];
- VUT direction;
- Target speed [km/h];
- Target movement;
- Target direction;
- Overlap;
- Obstruction;
- Lighting condition;
- Line type;
- Road type;
- Target type.
3. Results
3.1. Critical Test Scenario Selection Example Based on an Existing Vehicle
3.2. Proof of Concept: Comparing the Result of the Selection with Existing Vehicle-Specific Test Scenario Catalogues from Previous Projects
4. Discussion
Limitations
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ABS | Anti-lock Braking System |
| ACC | Adaptive Cruise Control |
| ACSF | Automatically Commanded Steering Function |
| ADAS | Advanced Driver Assistance Systems |
| ADDW | Advanced Driver Distraction Warning |
| ADS | Automated Driving Systems |
| AEB | Autonomous Emergency Braking/Advanced Emergency Braking |
| ALKS | Automated Lane Keeping Systems |
| AVPS | Automated Valet Parking Systems |
| BIS | British Standards Institution |
| BSIS | Blind Spot Information System (for the detection of bicycles) |
| CDCF | Corrective Directional Control Function |
| CS | Cosine Similarity |
| CSF | Corrective Steering Function |
| DCAS | Driver Control Assistance Systems |
| ED | Euclidean Distance |
| ESC | Electronic Stability Control |
| ESF | Emergency Steering Function |
| ESS | Emergency Steering Support |
| EuroNCAP | European New Car Assessment Programme |
| GVT | Global Vehicle Target |
| GVW | Gross Vehicle Weight |
| ISA | Intelligent Speed Assistance |
| LDWS | Lane Departure Warning System |
| LSS | Lane Support System |
| MD | Manhattan Distance |
| MDPI | Multidisciplinary Digital Publishing Institute |
| MOIS | Moving Off Information System |
| NATM | New Assessment/Test Method for Automated Driving |
| ODD | Operational Design Domain |
| OEDR | Object and Event Detection and Response |
| PoC | Proof of Concept |
| RECAS | Rear-End Collision Alert Signal |
| RMF | Risk Mitigation Function |
| SAE | Society of Automotive Engineers |
| SAS | Speed Assist System |
| SciL | Scenario-in-the-Loop |
| TIC | Testing, Inspection, and Certification (companies) |
| UHD | Ultra-High Definition |
| ViL | Vehicle-in-the-Loop |
| VRU | Vulnerable Road Users |
| VUT | Vehicle Under Test |
| WCS | Weighted Cosine Similarity |
Appendix A. Tables with Explanation for Data Processing

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Used Parameter 1 | Input Requirements | Comment | Numerical Representation |
|---|---|---|---|
| VUT speed [km/h] | Exact values in km/h ‘N/A’ | Only exact values or ‘N/A’ can be given. If ranges or values with < > are given, please select one of the reasonable boundaries or the middle value. The exact requirement can be provided in the related comments column. | Exact value divided by 100. In case of speed being higher than 130 km/h, value ‘1’ should be used. |
| VUT direction | ‘Forward’ ‘Rearward’ ‘Farside turn’ ‘Nearside turn’ ‘Stationary’ ‘N/A’ | Only ‘Forward’, ‘Rearward’, ‘Farside turn’ (left turn according to LHD traffic), ‘Nearside turn’ (right turn), and ‘Stationary’ can be given. If no target is used, ‘N/A’ should be entered. | ‘Forward’—‘1’ ‘Rearward’—‘−1’ ‘Farside turn’—‘0.5’ ‘Nearside turn’—‘−0.5’ ‘Stationary’—‘0’ ‘N/A’—‘0’ |
| Target speed [km/h] | Exact values in km/h ‘N/A’ ‘TBD’ | Only exact values, or N/A if no target is used, and TBD if the speed cannot be exactly determined. | Exact value divided by 100. In case of speed being higher than 130 km/h, value 1 should be used. |
| Target type | ‘EBT’ ‘EMT’ ‘EPTa’ ‘EPTc’ ‘GVT’ ‘GV-&EMT’ ‘N/A’ | ‘EBT’—bicycle target ‘EMT’—motorcycle target ‘EPTa’—adult pedestrian dummy ‘EPTc’—child pedestrian dummy ‘GVT’—global vehicle target (car) ‘GV-&EMT’—both car and motorcycle targets are needed ‘N/A’—no target | Not used for filtering |
| Target movement | ‘Crossing’ ‘Moving parallel’ ‘Stationary’ ‘N/A’ | Only ‘Crossing’ for perpendicular moving, ‘Moving parallel’ and ‘Stationary’, or ‘N/A’ can be used. The exact requirement can be provided in the related comments column. | ‘Crossing’—‘0.5’ ‘Moving parallel’—‘1’ ‘Stationary’—‘0’ ‘N/A’—‘0’ |
| Target direction | ‘Opposite direction’ ‘Same direction’ ‘Farside’ ‘Nearside’ ‘N/A’ | Only ‘Opposite direction’, ‘Same direction’, ‘Farside’, ‘Nearside’, and N/A can be used. The exact requirement can be provided in the related comments column. | ‘Opposite direction’—‘−1’ ‘Same direction’—‘1’ ‘Farside’—‘−0.5’ ‘Nearside’—‘0.5’ ‘N/A’—‘0’ |
| Overlap | Exact % values ‘N/A’ | Only exact values from —100% to 100% (usually with 25% steps) or ‘N/A’ if no target is used. | Exact value from % (i.e., 100% = 1) |
| Obstruction | ‘Yes’ ‘No’ | If the targets are used during the scenario in some specific cases, the targets are covered with other objects, like cars. In this case the scenarios are obstructed. | ‘Yes’—‘1’ ‘No’—‘0’ |
| Lateral distance [m] | Exact values ‘N/A’ | Lateral separation between the target and the VUT, mainly used in BSIS, MOIS, and door opening scenarios. | Not used for filtering |
| Longitudinal distance [m] | Exact values ‘N/A’ | Longitudinal separation between the target and the VUT, usually at the start of the functional part of a scenario. | Not used for filtering |
| Target deceleration [m/s2] | Exact values ‘N/A’ | Used in scenarios in which the target needs to brake. | Not used for filtering |
| Lighting condition | ‘Daylight’ ‘Night’ | In case of the exact illumination value [Lux] being given, it needs to be determined which option is more applicable. | ‘Daylight’—‘1’ ‘Night’—‘−1’ |
| Lateral velocity [m/s] | Exact values ‘Variable’ ‘N/A’ | Exact values, or ‘Variable’ if it can be changed, and ‘N/A’ if not related to lane departure. | >0.5—‘1’ >0 or ‘Variable’—‘0.5’ N/A—‘0’ |
| Lateral acceleration [m/s2] | Exact values ‘N/A’ | Usually, lateral acceleration during lane keeping in curves. | Not used for filtering |
| Side | ‘Driver’ ‘Passenger’ | Direction of the lane departure. | Not used for filtering |
| Line type | ‘Dashed’ ‘Solid’ ‘Road edge’ ‘N/A’ | Types of relevant lane markings should be mentioned. In case of no lane markings, ‘N/A’ or ‘Road edge’ should be used. | ‘Dashed’—‘0–5’ ‘Solid’—‘1’ ‘Road edge’—‘−1’ ‘N/A’—‘0’ |
| Intention | ‘Intentional’ ‘Unintentional’ | If applicable, the type of lane approach should be defined. | Not used for filtering |
| Road type | ‘Curved’ ‘Straight’ ‘Intersection’ ‘Non-urban’ ‘Urban’ ‘Motorway’ ‘N/A’ | According to the reviewed documentation, these types were mentioned. For the filtering, these could be categorized in three main groups. | ‘Curved’—‘0.66’ ‘Straight’—‘0.33’ ‘Intersection’—‘1’ ‘Non-urban’—‘0.66’ ‘Urban’—‘1’ ‘Motorway’—‘0.33’ ‘N/A’—‘0’ |
| Traffic Sign | Exact value ‘Explicit’ ‘Implicit’ ‘N/A’ | Naming according to Regulation (EU) 2021/1958 (ISA). Use exact value in case of the speed limit being given on an explicit sign. Use ‘Explicit’ if the number is not defined. | Not used for filtering |
| Weight condition | ‘Loaded’ ‘Unloaded’ | Use ‘Unloaded’ if the test shall be carried out with ‘mass in running order’ or not specified. If weights should be used, then use ‘Loaded1’. | Not used for filtering |
| Category | ‘M1’, ‘M2’, ‘M3’ ‘N1’, ‘N2’, ‘N3’ | Category is based on the purpose of the vehicle such as carrying of passengers (M) or goods (N), and the weight (1–3). | Not used for filtering |
| Vector Parameter | Explanation | Rationale of the Database | Rationale of the Questionnaire | Explanation of Weight | Weight |
|---|---|---|---|---|---|
| M | Vehicle category for carrying passengers | Processed with ‘one-hot encoding’. The scope vehicle category is specified in the regulations, standards, and protocols and included in the ‘Category’ column in the database. | Processed with ‘one-hot encoding’. Question 1 parameters: Transportation of passengers: M; Carrying goods: N. | Weight is shared equally between vector parameter ‘M’ and ‘N’ because these belong to one question or database parameter. | 0.5 |
| N | Vehicle category for carrying goods | 0.5 | |||
| Dimensions 1—≤3.5 t | Vehicles with GVW under 3.5 t | Processed with ‘one-hot encoding’. The scope vehicle dimension is specified in the regulations, standards, and protocols and included in the ‘Dimensions’ column in the database. | Processed with ‘one-hot encoding’. Processing is based on the answer to Question 5. The function checks the GVW of the vehicle and fills the right column with ‘1’. | Weight is shared equally between the 4 different ‘Dimension’ vector parameters because these belong to one question or database parameter. | 0.25 |
| Dimensions 2—≤5 t | Vehicles with GVW between 3.5 t and 5 t | 0.25 | |||
| Dimensions 3—≤12 t | Vehicles with GVW between 5 t and 12 t | 0.25 | |||
| Dimensions 4—≥12 t | Vehicles with GVW above 12 t | 0.25 | |||
| MW | Closed roads with physical separation and at least two or more lanes in the same direction of travel, without junctions (e.g., motorways, expressways) | Processed with ‘one-hot encoding’ based on the manually extended test run database checking the ‘Target ODD’ column. | Processed with ‘one-hot encoding’ based on the answer to Question 6 of the questionnaire. | Weight is shared equally between the 3 different types of environments (MW, RR, UA) in the vector parameter because these belong to one question or database parameter. | 0.33 |
| RR | Non-separated roads, with one or two lanes in one direction, with possible junctions, roundabouts (e.g., rural or country roads) | 0.33 | |||
| UA | Urban environments with various junctions, traffic management system, buildings, etc. (e.g., cities, villages) | 0.33 | |||
| Speed v ≤ 30 km/h | VUT speed under 30 km/h during test execution | Processed with ‘one-hot encoding’. The speed or speed range of the test run is specified in the regulations, standards, and protocols and included in the ‘Speed’ column in the database. | Processed with ‘one-hot encoding’. Processing is based on the answer to Question 8. The function checks the planned maximum operational speed of the vehicle and fills the right column with ‘1’. | Weight is shared equally between the 4 different ‘Dimension’ vector parameters because these belong to one question or parameter. However, if a well-defined speed range is provided in the questionnaire for the planned maximum and minimum operational speeds, the affected range can be given a larger weight (e.g., 0.5). | 0.25 |
| Speed 30 < v ≤ 50 km/h | VUT speed between 30 and 50 km/h during test execution | 0.25 | |||
| Speed 50 < v ≤ 100 km/h | VUT speed between 50 and 100 km/h during test execution | 0.25 | |||
| Speed v > 100 km/h | VUT speed above 100 km/h during test execution | 0.25 | |||
| Lane keeping | Analyzing whether the test runs are relevant for lane keeping situations, and whether the vehicle is capable of keeping its current driving lane | In the manually extended test run database, scenarios that are relevant for lane keeping are marked with an ‘x’. The function searches for these runs and fills the column with ‘1’ if it finds any. | Question 10 targets the lane keeping capabilities of the vehicle. The column is filled with ‘1’ if the answer is ‘Yes’. | Lane keeping is a crucial capability in an automated driving function; therefore, it is assigned a larger weight. | 1 |
| Safe distance | Analyzing whether the test runs are relevant for vehicle following and AEB situations, and whether the vehicle is capable of performing in them | In the manually extended test run database, runs are marked with an ‘x’ if the run is relevant. for ‘Stopping in front of a static object’, ‘Stopping in front of a moving object’, or ‘Suddenly appearing objects’. The function searches for these runs and fills the column with ‘1’ if it finds any. | Question 11 targets the safe distance maintenance capabilities of the vehicle. The column is filled with ‘1’ if the answer is ‘Yes’. | Keeping a safe distance from other road users is a crucial capability of an automated driving function; therefore, it is assigned a larger weight. | 1 |
| Lane changing | Analyzing whether the test runs are relevant for lane changing situations, and whether the vehicle is capable of changing its current driving lane | In the manually extended test run database, scenarios that are relevant for lane changing are marked with an ‘x’. The function searches for these runs and fills the column with ‘1’ if it finds any. | Question 12 targets the lane changing capabilities of the vehicle. The column is filled with ‘1’ if any answer is selected. | Lane changing is an important automated driving function, so the default weight is large. However, based on the selected answers in the questionnaire, the weight can be adjusted to a lower value. | 0.33–1 |
| Turning | Analyzing whether the test runs are relevant for turning, and whether the vehicle is capable of turning aside from when it is following its driving lane | In the manually extended test run database, scenarios that are relevant for turning are marked with an ‘x’. The function searches for these runs and fills the column with ‘1’ if it finds any. | Question 13 targets the turning capabilities of the vehicle. The column is filled with ‘1’ if the answer is ‘Yes’. | Turning is a crucial capability in an automated driving function; therefore, it is assigned a larger weight. | 1 |
| Handling of traffic signs and rules | Analyzing whether the test runs are relevant for handling of traffic signs and rules, and whether the vehicle is capable of handling of traffic signs and rules | In the manually extended test run database, scenarios that are relevant for handling of traffic signs and rules are marked with an ‘x’. The function searches for these runs and fills the column with ‘1’ if it finds any. | Question 14 is checking whether the vehicle is capable of handling of traffic signs and rules. The column is filled with ‘1’ if any answer is selected. | Handling of traffic signs and rules could be an important driving function, so the default weight is large. However, based on the selected answers in the questionnaire, the weight can be adjusted to a lower value. | 0.2–1 |
| Handling of junctions | Analyzing whether the test runs are relevant for handling of junctions, and whether the vehicle is capable of handling of junctions | In the manually extended test run database, scenarios that are relevant for handling of junctions are marked with an ‘x’. The function searches for these runs and fills the column with ‘1’ if it finds any. | Question 12 targets junction handling capabilities of the vehicle. The column is filled with ‘1’ if any answer is selected. | Handling of junctions could be an important driving function, so the default weight is large. However, based on the selected answers in the questionnaire, the weight can be adjusted to a lower value. | 0.25–1 |
| Relevance for standing passengers | Analyzing whether the test runs are relevant for standing passengers, and whether the vehicle is capable of recognizing and handling if there are standing passengers on board | In the manually extended test run database, scenarios that are relevant for standing passengers are marked with an ’x’. The function searches for these runs and fills the column with ‘1’ if it finds any. | Question 16 checks whether the vehicle is capable of recognizing and handling if there are standing passengers on board. The column is filled with ‘1’ if the answer is ‘Yes’. | In the case of standing passengers, the vehicle needs to adapt its dynamics accordingly, making this an important parameter. | 1 |
| Reversing | Analyzing whether the test runs are relevant for reversing, and whether the vehicle is capable of reversing | In the manually extended test run database, scenarios that are relevant for reversing are marked with an ’x’. The function searches for these runs and fills the column with ‘1’ if it finds any. | Question 18 targets the reversing capabilities of the vehicle. The column is filled with ‘1’ if the answer is ‘Yes’. | Reversing could be a more critical maneuver, so the weight of this parameter is also larger. | 1 |
| Parking | Analyzing whether the test runs are relevant for parking, and whether the vehicle is capable of parking | In the manually extended test run database, scenarios that are relevant for parking are marked with an ‘x’. The function searches for these runs and fills the column with ‘1’ if it finds any | Question 19 targets reversing capabilities of the vehicle. The column is filled with ‘1’ if any answer is selected. | Automated parking could be an important capability in the future, so the basic weight is larger. However, based on the selected answers in the questionnaire, the weight can be adjusted to a lower value. | 0.33–1 |
Appendix B. Questionnaire
- ‘Multiple choice’: one answer shall be selected from the list;
- ‘Checkboxes’: more options can be selected from the list;
- ‘Short answer’: a short text should be the answer;
- ‘Paragraph’: a longer text can be used as an answer.
- Purpose of the application * (Multiple choice)
- Transporting of passengers
- Carrying goods
- Other: …
- Length of the vehicle in mm * (Short answer)
- Height of the vehicle in mm * (Short answer)
- Width of the vehicle in mm * (Short answer)
- Weight of the vehicle in kg (GVW) * (Short answer)
- Target operational environment * (Checkboxes)
- MW: Closed roads with physical separation and at least two or more lanes in the same direction of travel, without junctions (e.g., motorways, expressways)
- RR: Non-separated roads, with one or two lanes in one direction, with possible junctions, roundabouts (e.g., rural or country roads)
- UA: Urban environments with various junctions, traffic management system, buildings, etc. (e.g., cities, villages)
- Private closed environment without public traffic
- Does the vehicle handle transient between the ODDs? If not, leave it empty. (Checkboxes)
- Handles between MW-RR types (e.g., leaving or entering a motorway)
- Handles between MW-UA types (e.g., a motorway directly flows into a suburban area of a larger city)
- Handles between RR-UA types (e.g., regular city limits with new speed limits)
- Planned maximum operational speed in km/h? * (Short answer)
- Planned minimum operational speed in km/h? * (Short answer)
- Is the vehicle capable of keeping in the lane? * (Multiple choice)
- Yes
- No
- Is the vehicle capable of maintaining safe distance? * (Multiple choice)
- Yes
- No
- Is the vehicle capable of changing between lanes? If not, leave it empty. (Checkboxes)
- Yes, to avoid critical situations and obstacles
- Yes, for overtaking
- Turning (not equivalent with turning for lane keeping). I.e., turning to leave the current road in junctions. * (Multiple choice)
- Yes
- No
- Handling of traffic rules and signs (please select from the list below; if none of the options are applicable, please leave it empty). (Checkboxes)
- Speed limits (e.g., speed-limit signs or map data)
- Traffic signs (especially ‘give-way’ and ‘STOP’)
- Traffic lights
- Lane markings
- Special lanes (e.g., BUS, bicycle)
- Handling of junctions (please select from the list below; if none of the options are applicable, please leave it empty). (Checkboxes)
- Stop and go further in the original road in junctions
- Turning right from the main road in junctions
- Turning left from the main road in junctions
- U-turn in relevant junctions
- Transportation of standing passengers? * (Multiple choice)
- Yes
- No
- Type of supervision * (Checkboxes)
- Remote
- Safety operator with longitudinal ‘2-bit’ control
- Safety operator with longitudinal and lateral control
- Other: …
- Capable of reversing in automated mode? * (Multiple choice)
- Yes
- No
- Automated parking (please select from the list below; if none of the options are applicable, please leave it empty). (Checkboxes)
- Parking forward in perpendicular or angled
- Parking backwards in perpendicular or angled
- Parallel parking
- Type of sensors for automated functions * (Checkboxes)
- dGNSS
- LiDAR
- Radar
- Camera
- Ultrasonic
- Other: …
- Is the deployment of the vehicle planned in left-hand traffic (LHT) or right-hand traffic (RHT)? * (Checkboxes)
- LHT
- RHT
- Targeted level of driving automation according to SAE J3016 (Multiple choice)
- LEVEL 3
- LEVEL 4
- LEVEL 5
- Please provide any additional information about the vehicle that you think is important for scenario catalogue development. (Paragraph)
References
- Myers, R.; Saigol, Z. Pass-Fail Criteria for Scenario-Based Testing of Automated Driving Systems. arXiv 2020, arXiv:2005.09417v2. [Google Scholar]
- UNECE: New Assessment/Test Method for Automated Driving (NATM) Guidelines for Validating Automated Driving System (ADS). 2022. Available online: https://unece.org/sites/default/files/2022-04/ECE-TRANS-WP.29-2022-58.pdf (accessed on 25 March 2025).
- Commission Implementing Regulation (EU) 2022/1426 of 5 August 2022 Laying down Rules for the Application of Regulation (EU) 2019/2144 of the European Parliament and of the Council as Regards Uniform Procedures and Technical Specifications for the Type-Approval of the Automated Driving System (ADS) of Fully Automated Vehicles (Text with EEA Relevance). Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX%3A32022R1426 (accessed on 25 March 2025).
- Yan, M.; Rampino, L.; Caruso, G. Comparing User Acceptance in Human–Machine Interfaces Assessments of Shared Autonomous Vehicles: A Standardized Test Procedure. Appl. Sci. 2025, 15, 45. [Google Scholar] [CrossRef]
- PEGASUS Projekt: Scenario Description. 2019. Available online: https://www.pegasusprojekt.de/files/tmpl/PDF-Symposium/04_Scenario-Description.pdf (accessed on 25 March 2025).
- UNECE 1958 Agreement: Addendum 170–UN Regulation No. 171: Uniform Provisions Concerning the Approval of Vehicles with Regard to Driver Control Assistance Systems. 2024. Available online: https://unece.org/sites/default/files/2025-01/R171e%20%282%29.pdf (accessed on 14 February 2025).
- Vass, S.; Donà, R.; Mattas, K.; Morandin, G.; Toth, B.; Heé, M.Á.; Galassi, M.C.; Ciuffo, B. Are Low-Speed Automated Vehicles Ready for Deployment? Implications on Safety and Urban Traffic. Transp. Res. Part C 2023. submitted.. [Google Scholar]
- KBA: Autonome-Fahrzeuge-Genehmigungs-Und Betriebs-Verordnung (AFGBV). 2022. Available online: https://www.gesetze-im-internet.de/afgbv/ (accessed on 13 March 2025).
- Kalra, N.; Paddock, S.M. Driving to Safety: How Many Miles of Driving Would It Take to Demonstrate Autonomous Vehicle Reliability? Transp. Res. Part. A Policy Pract. 2016, 94, 182–193. [Google Scholar] [CrossRef]
- Donà, R.; Ciuffo, B. Virtual Testing of Automated Driving Systems. A Survey on Validation Methods. IEEE Access 2022, 10, 24349–24367. [Google Scholar] [CrossRef]
- Razdan, R.; Akbaş, M.İ.; Sell, R.; Bellone, M.; Menase, M.; Malayjerdi, M. PolyVerif: An Open-Source Environment for Autonomous Vehicle Validation and Verification Research Acceleration. IEEE Access 2023, 11, 28343–28354. [Google Scholar] [CrossRef]
- Katzorke, N.; Vinçon, C.; Kolar, P.; Lasi, H. Fields of Interest and Demands for a Digital Proving Ground Twin. Transp. Res. Interdiscip. Perspect. 2023, 18, 100782. [Google Scholar] [CrossRef]
- Toth, B.; Szalay, Z. Development and Functional Validation Method of the Scenario-in-the-Loop Simulation Control Model Using Co-Simulation Techniques. Machines 2023, 11, 1028. [Google Scholar] [CrossRef]
- Szalay, Z.; Szalai, M.; Tóth, B.; Tettamanti, T.; Tihanyi, V. Proof of Concept for Scenario-in-the-Loop (SciL) Testing for Autonomous Vehicle Technology. In Proceedings of the 2019 IEEE International Conference on Connected Vehicles and Expo (ICCVE), Graz, Austria, 4–8 November 2019. [Google Scholar]
- MATLAB Help Center: Simulate Vehicle Dynamics in ZalaZONE Automotive Proving Ground 3D Scene. Available online: https://ch.mathworks.com/help/vdynblks/ug/simulate-vehicle-dynamics-in-zalazone-automotive-proving-ground-3d-scene.html (accessed on 11 April 2025).
- Katzorke, N.; Moosmann, M.; Imdahl, R.; Lasi, H. A Method to Assess and Compare Proving Grounds in the Context of Automated Driving Systems. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020. [Google Scholar]
- Shakeri, A. Formalization of Operational Domain and Operational Design Domain for Automated Vehicles. In Proceedings of the 2024 IEEE 24th International Conference on Software Quality, Reliability, and Security Companion (QRS-C), Cambridge, UK, 1–5 July 2024. [Google Scholar]
- Eichenseer, F.; Sarkar, S.; Shakeri, A. A Systematic Methodology for Specifying the Operational Design Domain of Automated Vehicles. In Proceedings of the 2024 IEEE 35th International Symposium on Software Reliability Engineering Workshops (ISSREW), Tsukuba, Japan, 28–31 October 2024. [Google Scholar]
- Feng, S.; Feng, Y.; Yan, X.; Shen, S.; Xu, S.; Liu, H.X. Safety Assessment of Highly Automated Driving Systems in Test Tracks: A New Framework. Accid. Anal. Prev. 2020, 144, 105664. [Google Scholar] [CrossRef] [PubMed]
- Feng, S.; Feng, Y.; Sun, H.; Zhang, Y.; Liu, H.X. Testing Scenario Library Generation for Connected and Automated Vehicles: An Adaptive Framework. IEEE Trans. Intell. Transport. Syst. 2022, 23, 1213–1222. [Google Scholar] [CrossRef]
- Li, S.; Li, W.; Li, P.; Ma, P.; Yang, M. Novel Test Scenario Generation Technology for Performance Evaluation of Automated Vehicle. Int. J. Automot. Technol. 2022, 23, 1295–1312. [Google Scholar] [CrossRef]
- Wang, Z.; Ma, J.; Lai, E.M.-K. A Survey of Scenario Generation for Automated Vehicle Testing and Validation. Future Internet 2024, 16, 480. [Google Scholar] [CrossRef]
- Wu, X.; Chen, J.; Xing, X.; Sun, J.; Tian, Y.; Liu, L.; Shen, Y. LAMBDA: Covering the Multimodal Critical Scenarios for Automated Driving Systems by Search Space Quantization. arXiv 2024, arXiv:2412.00517. [Google Scholar]
- Dong, H.; Hu, Q.; Li, D.; Li, Z.; Song, Z. Predictive Battery Thermal and Energy Management for Connected and Automated Electric Vehicles. IEEE Trans. Intell. Transp. Syst. 2025, 26, 2144–2156. [Google Scholar] [CrossRef]
- Reckenzaun, J.; Csanady, L.; Eichberger, A.; Engelstein, A.; Hörmann, L.; Kiss, T.; Luley, P.; Rüther, M.; Schwarz, S.; Strasser-Krauss, T.; et al. Transnational Testing, Operation and Certification of Automated Driving Systems: Perspective from testEPS and Central System EUREKA Projects. In Proceedings of the 2022 International Conference on Connected Vehicle and Expo (ICCVE), Lakeland, FL, USA, 7–9 March 2022. [Google Scholar]
- Reckenzaun, J.; Rott, R.; Kirchengast, M.; Ritter, D.J.; Innerwinkler, P.; Solmaz, S.; Pilz, C.; Schratter, M.; Eichberger, A.; Mihalj, T.; et al. Transnational Testing, Operation and Certification of Automated Driving Systems: Perspective from testEPS and Central System EUREKA Projects-Mid-Term Results. In Proceedings of the 2023 IEEE International Automated Vehicle Validation Conference (IAVVC), Austin, TX, USA, 16–18 October 2023. [Google Scholar]
- Reckenzaun, J.; Rott, R.; Nikolić, O.; Innerwinkler, P.; Kirchengast, M.; Ritter, D.J.; Solmaz, S.; Ladstätter, S.; Luley, P.; Toth, B.; et al. Transnational Testing, Operation and Certification of Automated Driving Systems–Building Bricks for the NATM Multi-Pillar Framework. In Proceedings of the 2024 IEEE International Automated Vehicle Validation Conference (IAVVC), Pittsburgh, PA, USA, 22–23 October 2024. [Google Scholar]
- Li, J.; Zong, R.; Wang, Y.; Deng, W. Complexity Evaluation for Urban Intersection Scenarios in Autonomous Driving Tests: Method and Validation. Appl. Sci. 2024, 14, 10451. [Google Scholar] [CrossRef]
- Xia, P.; Zhang, L.; Li, F. Learning Similarity with Cosine Similarity Ensemble. Inf. Sci. 2015, 307, 39–52. [Google Scholar] [CrossRef]
- Steck, H.; Ekanadham, C.; Kallus, N. Is Cosine-Similarity of Embeddings Really About Similarity? In Proceedings of the Companion ACM Web Conference 2024, Singapore, 13–17 May 2024. [Google Scholar]
- Wang, D.; Lu, H.; Bo, C. Visual Tracking via Weighted Local Cosine Similarity. IEEE Trans. Cybern. 2015, 45, 1838–1850. [Google Scholar] [CrossRef] [PubMed]
- Boyd, S.; Vandenberghe, L. Chapter 3: Norm and distance. In Introduction to Applied Linear Algebra: Vectors, Matrices, and Least Squares, 1st ed.; Cambridge University Press: Cambridge, UK, 2018; pp. 45–68. [Google Scholar]
| No. | Type 1 | Document ID 2 | Related Organization | Scope 3 |
|---|---|---|---|---|
| 1 | P | EuroNCAP AEB C2C Test Protocol v4.3.1 | EuroNCAP | AEB |
| 2 | P | EuroNCAP AEB LSS Test Protocol v4.3 | EuroNCAP | LSS |
| 3 | P | EuroNCAP AEB SAS Test Protocol v2.0 | EuroNCAP | SAS |
| 4 | P | EuroNCAP AEB LSS VRU Test Protocol v4.5.1 | EuroNCAP | AEB/LSS |
| 5 | P | EuroNCAP AD Test and Assessment Protocol v2.2 | EuroNCAP | ACC AEB/LSS/SAS |
| 6 | P | Technical Bulletin 037 ESS Assessment v1.0 | EuroNCAP | ESS |
| 7 | R | UN Regulation No. 48 | UNECE | RECAS |
| 8 | R | UN Regulation No. 79 | UNECE | CSF/ACSF/ESF/RMF |
| 9 | R | UN Regulation No. 130 | UNECE | LDWS |
| 10 | R | UN Regulation No. 151 | UNECE | BSIS |
| 11 | R | UN Regulation No. 152 | UNECE | AEB |
| 12 | R | UN Regulation No. 157 | UNECE | ALKS |
| 13 | R | UN Regulation No. 159 | UNECE | MOIS |
| 14 | R | UN Regulation No. 171 | UNECE | DCAS |
| 15 | R | Regulation (EU) 2021/646 | European Commission | LDWS/CDCF |
| 16 | R | Regulation (EU) 2021/1958 | European Commission | ISA |
| 17 | R | Regulation (EU) 2023/2590 | European Commission | ADDW |
| 18 | S | ISO 22737 | ISO | LSAD |
| 19 | S | ISO 23374 | ISO | AVPS |
| Question | Answer | Vector Parameter and Value If Applicable | Weight If Applicable |
|---|---|---|---|
| Purpose of the application | Transporting of passengers | M = 1 N = 0 | 0.5 0.5 |
| Length of the vehicle in mm | 5000 | ||
| Height of the vehicle in mm | 1500 | N/A | N/A |
| Width of the vehicle in mm | 1850 | ||
| Weight of the vehicle in kg (GVW) | 2200 | Dimensions 1—≤3.5t = 1 Dimensions 2—≤5t = 0 Dimensions 3—≤12t = 0 Dimensions 4—≥12t = 0 | 0.25 0.25 0.25 0.25 |
| Target operational environment | MW: Closed roads with physical separation and at least two or more lanes in the same direction of travel, without junctions (e.g., motorways, expressways) | MW = 1 RR = 0 UA = 0 | 0.33 0.33 0.33 |
| Does the vehicle handle transient between the ODDs? If not, leave it empty. | Empty | N/A | N/A |
| Planned maximum operational speed in km/h? | 130 | Speed v ≤ 30 = 0 Speed 30 < v ≤ 50 = 1 Speed 50 < v ≤ 100 = 0 Speed v > 100 = 1 | 0.25 0.25 0.25 0.5 |
| Planned minimum operational speed in km/h? | 65 | N/A | |
| Is the vehicle capable of keeping in the lane? | Yes | Lane keeping = 1 | 1 |
| Is the vehicle capable of maintaining a safe distance? | Yes | Safe distance = 1 | 1 |
| Is the vehicle capable of changing between lanes? If not, leave it empty. | Yes, to avoid critical situations and obstacles; Yes, for overtaking | Lane changing = 1 | 1 |
| Turning (not equivalent with turning for lane keeping). I.e., turning to leave the current road at junctions. | No | Turning = 0 | 1 |
| Handling of traffic rules and signs (please select from the list below; if none of the options are applicable, please leave it empty). | Speed limits (e.g., speed-limit signs or map data), Lane markings | Handling of traffic signs and rules = 1 | 0.4 |
| Handling of junctions (please select from the list below; if none of the options are applicable, please leave it empty). | Empty | Handling of junctions = 0 | 0.5 |
| Transportation of standing passengers? | No | Relevant for standing passengers = 0 | 0.5 |
| Type of supervision | Safety operator with longitudinal and lateral control | N/A | N/A |
| Capable of reversing in automated mode? | No | Reversing = 0 | 0.5 |
| Automated parking (please select from the list below; if none of the options are applicable, please leave it empty). | Parking forward perpendicular or angled, parking backwards perpendicular or angled, parallel parking | Parking = 1 | 1 |
| Type of sensors for automated functions | LiDAR, radar, camera, ultrasonic | N/A | N/A |
| Is the deployment of the vehicle is planned in left-hand traffic (LHT) or right-hand traffic (RHT)? | LHT, RHT | N/A | N/A |
| Please provide any additional information about the vehicle that you think is important for scenario catalogue development. | Empty | N/A | N/A |
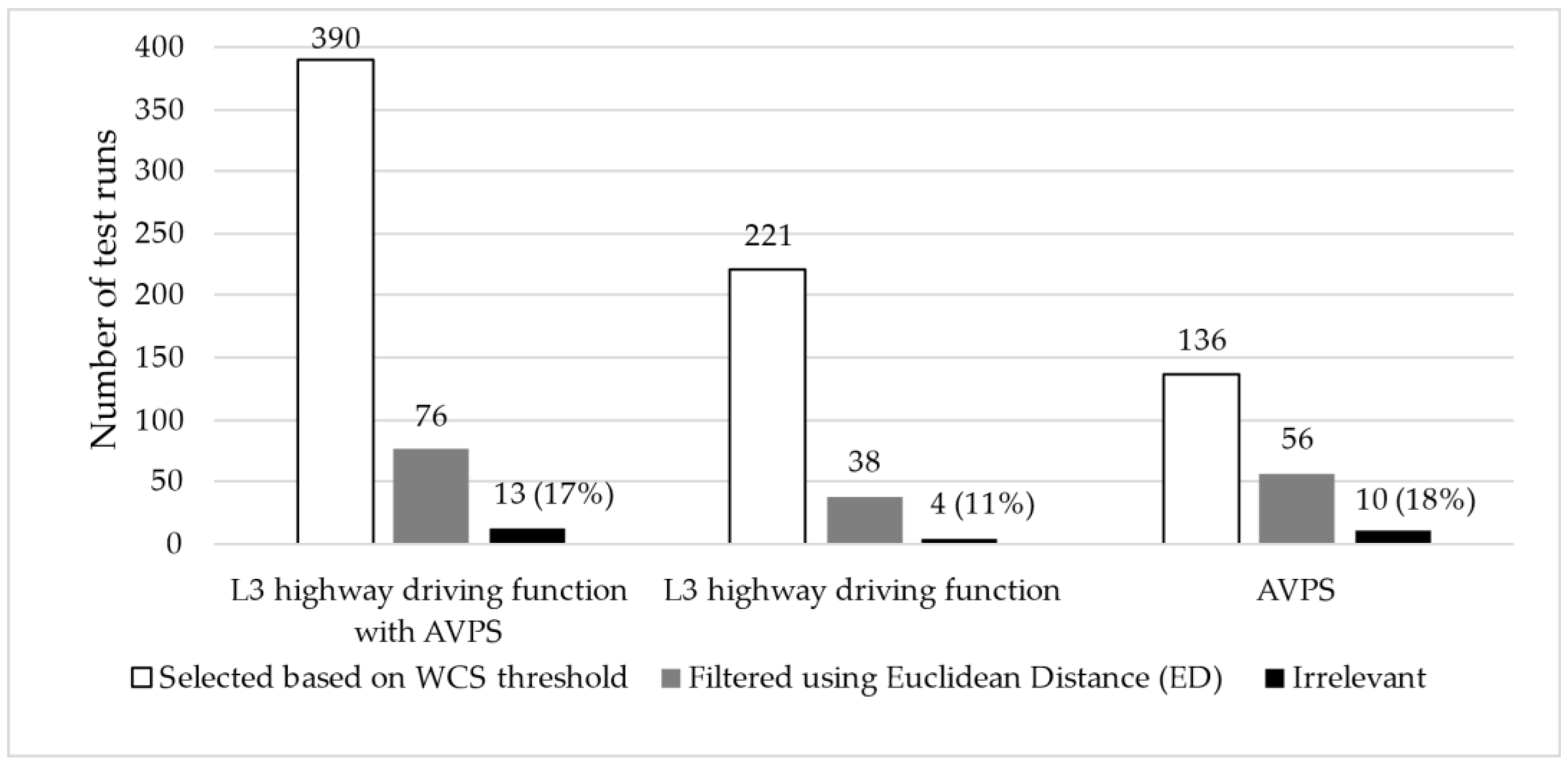
| Vehicle | Number of Test Runs | |||
|---|---|---|---|---|
| Initial | Selected Based on WCS | Filtered Using Euclidean Distance (ED) | That Are Irrelevant | |
| L3 highway driving function with AVPS | 1052 | 390 | 76 | 13 |
| L3 highway driving function | 1052 | 221 | 38 | 4 |
| AVPS | 1052 | 136 | 56 | 10 |
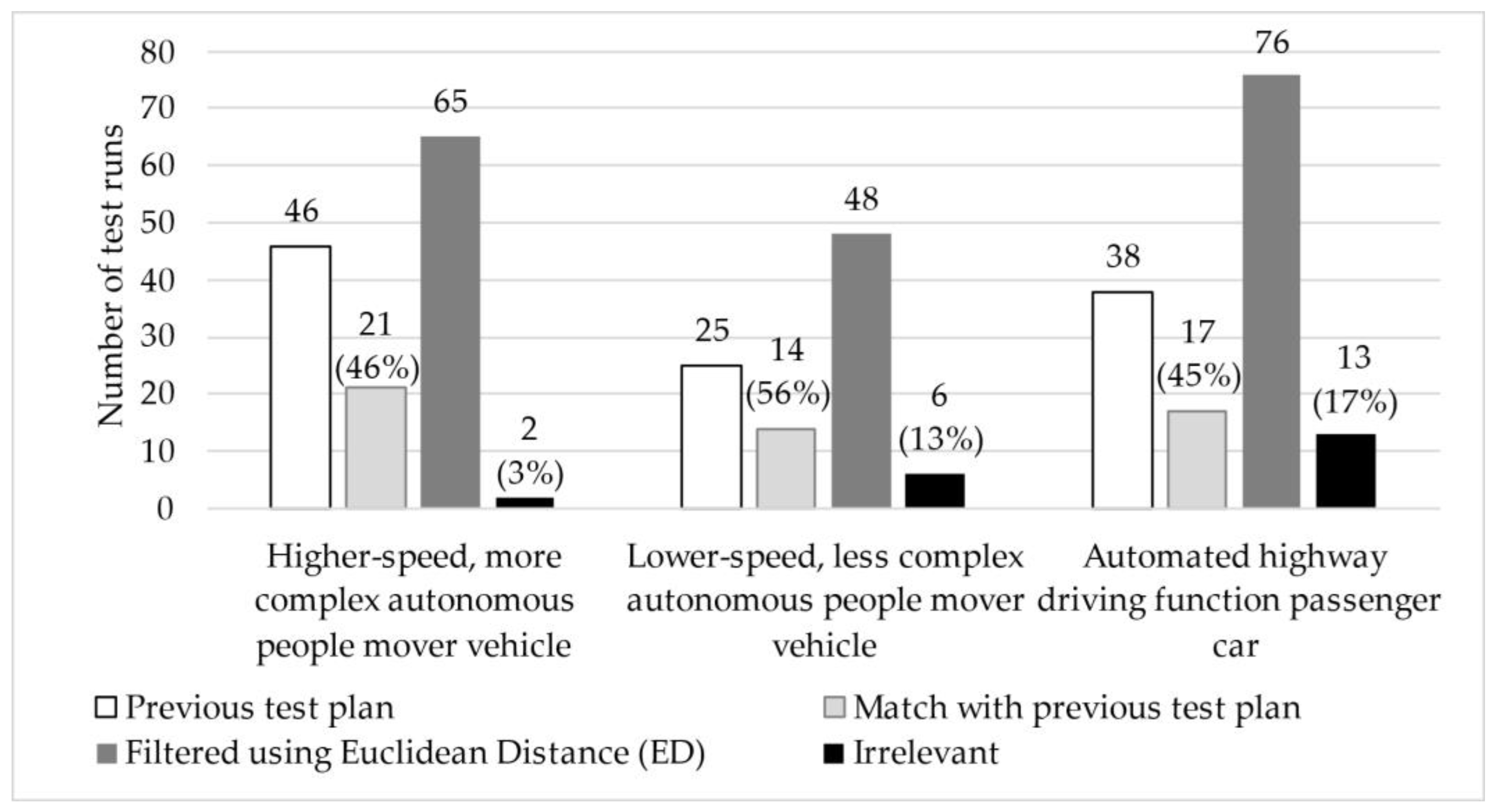
| Vehicle | Number of Test Runs | |||
|---|---|---|---|---|
| In the Previous Test Plan | Matching with the Previous Test Plan | Filtered Using Euclidean Distance (ED) | That Are Irrelevant | |
| Higher-speed, more complex autonomous people mover vehicle | 46 | 21 | 65 | 2 |
| Lower-speed, less complex autonomous people mover vehicle | 25 | 14 | 48 | 6 |
| Automated highway driving function passenger car | 38 | 17 | 76 | 13 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Toth, B.; Szalay, Z. Minimum Critical Test Scenario Set Selection for Autonomous Vehicles Prior to First Deployment and Public Road Testing. Appl. Sci. 2025, 15, 7031. https://doi.org/10.3390/app15137031
Toth B, Szalay Z. Minimum Critical Test Scenario Set Selection for Autonomous Vehicles Prior to First Deployment and Public Road Testing. Applied Sciences. 2025; 15(13):7031. https://doi.org/10.3390/app15137031
Chicago/Turabian StyleToth, Balint, and Zsolt Szalay. 2025. "Minimum Critical Test Scenario Set Selection for Autonomous Vehicles Prior to First Deployment and Public Road Testing" Applied Sciences 15, no. 13: 7031. https://doi.org/10.3390/app15137031
APA StyleToth, B., & Szalay, Z. (2025). Minimum Critical Test Scenario Set Selection for Autonomous Vehicles Prior to First Deployment and Public Road Testing. Applied Sciences, 15(13), 7031. https://doi.org/10.3390/app15137031