1. Introduction
With the integration of distributed renewable energy sources into the new distribution system, the reserve capacity of the conventional power grid is insufficient, and the anti-disturbance capability of some power supply units in the distribution network has decreased, leading to the low inertia characteristic of the new distribution system being prone to causing large-scale frequency fluctuations. This poses significant challenges to the safe and reliable power supply of the distribution system and the large-scale consumption of distributed PV power. The RoCoF is one of the important factors for measuring the stability of a low-inertia distribution system after being disturbed. A high RoCoF can cause the large-scale disconnection of distributed PV inverters in the distribution network due to frequency change rate protection [
1,
2], exacerbating power shortages in the distribution network and leading to dual instability in both the active power and voltage. In the new distribution system, limiting RoCoF under disturbances has become a critical research objective for maintaining system stability.
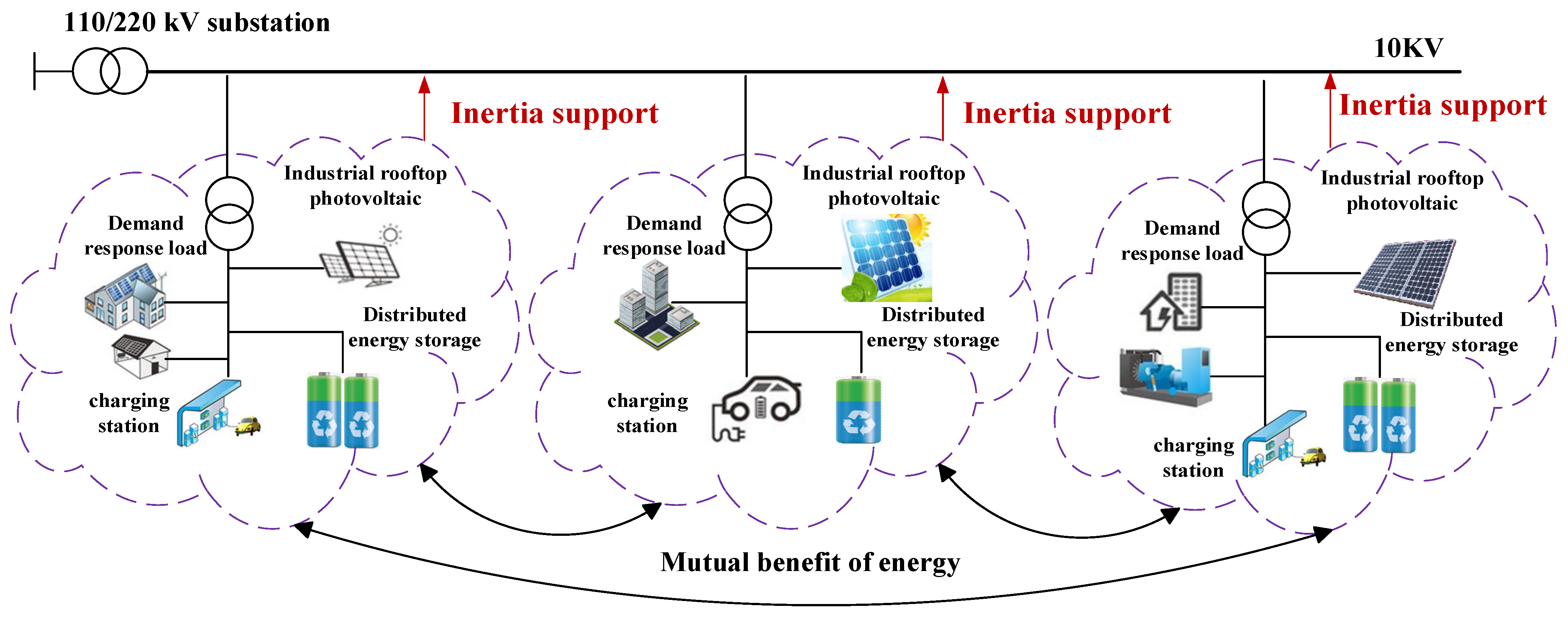
The magnitude of RoCoF is mainly determined by the inertia of the power supply units in the distribution system. In the new distribution system, with a high penetration of renewable energy, maintaining frequency stability across multiple autonomous regions following disturbances in the off-grid state has become a major research focus. Virtual inertia, implemented through control strategies applied to grid-forming PV systems and distributed ESS, can counteract system frequency changes. Consequently, frequency stability across multiple regions can be achieved through the coordinated allocation and distribution of virtual inertia. Researchers worldwide have explored areas such as inertia demand assessment [
3,
4] and virtual inertia allocation [
5,
6]. Regarding inertia demand assessment, reference [
7] defines the minimum inertia demand for a microgrid based on an in-depth analysis of their inertia and frequency characteristics and also analyzes the evolution of these characteristics under the coordinated effects of virtual inertia control and demand response. Reference [
8] proposes a probabilistic algorithm for assessing available wind farm inertia to account for discrepancies between the nominal value and the actual value influenced by wind speed distribution and turbine operating conditions. Reference [
9] introduces a multi-dimensional evaluation framework for the grid inertia level. This framework utilizes three quantitative indicators: the rotational kinetic energy of operational units, the inertia change rate, and the inertia distribution index. This allows us to effectively address the diverse evaluation requirements of DC systems and power grids with high renewable energy penetration. Based on the dynamic behavior of the nodal frequency during disturbances, reference [
5] analyzes the spatio-temporal characteristics of power system inertia and constructs an inertia index derived from the energy of nodal frequency signals under small disturbances. Reference [
10] proposes an optimal operation strategy for power systems with high renewable penetration. This strategy, leveraging minimum inertia assessment technology, employs a three-stage framework: preprocessing, minimum inertia assessment, and optimal operation. Reference [
11] introduces the concept of critical inertia, defining the minimum system inertia required to maintain acceptable frequency conditions and adhere to the RoCoF limits for a given load level.
Regarding virtual inertia allocation, reference [
12] calculated the regional inertia demand using a time-dependent Gaussian mixture model encoded with a Markov chain, illustrated by the British power system, and provided a corresponding virtual inertia allocation strategy. Reference [
13] proposed the concept of optimal inertia allocation and allocated inertia from an optimal control perspective; however, the overly simplistic models preclude its application in new distribution system analysis. Reference [
14] described the frequency dynamic response of network nodes using swing equations and optimized the inertia distribution to improve the damping ratio of oscillation modes. Based on reference [
14], reference [
15] determined the spatial distribution of system inertia with the goal of damping optimization. Reference [
6] proposed a virtual inertia matching method for the multi-machine parallel operation of virtual synchronous generators. According to this inertia matching principle, the virtual inertia of each VSG is configured to ensure that each VSG can allocate the load in proportion to its capacity in both steady-state and transient processes. Reference [
16] configured virtual inertia by considering the stability impact of small disturbances and the frequency stability on voltage-source and current-source virtual synchronous machines. Reference [
17] employed state-space small-signal model analysis to improve the transient power distribution performance of virtual generators without compromising steady-state power sharing. Reference [
18] proposed an optimization method for virtual inertia allocation based on Voronoi diagram interpolation. Reference [
19] established a virtual inertia optimization distribution model with the goal of maximizing the damping ratio of interval oscillation modes in small disturbance analysis, taking virtual inertia control parameters as optimization variables and frequency stability as constraints. Then, the model was solved using a Newton method based on sensitivity analysis to obtain the virtual inertia optimization allocation scheme, but it did not consider the coordinated allocation of virtual inertia among multiple regions. The application environments of the existing virtual inertia allocation methods and the method proposed in this paper are shown in
Table 1.
In summary, existing studies have established fundamental principles and methods for virtual inertia allocation. However, they have not adequately addressed the coordinated allocation of virtual inertia across multiple regions while ensuring system inertial security. Specifically, current approaches lack a mechanism to enhance the uniformity of RoCoF among regions and minimize the overall RoCoF magnitude, preventing scenarios where a region experiences excessive disturbances but possesses insufficient local virtual inertia to maintain its frequency stability. To bridge this gap, this paper proposes a neural network-based coordinated virtual inertia allocation method for multi-region distribution systems, ensuring each region’s inertia demand is satisfied.
Firstly, utilizing a data-driven approach, RBFNN identifies the boundaries of feasible virtual inertia that distributed resources can offer under various disturbance scenarios. Secondly, an optimization model for virtual inertia allocation is formulated, aiming to minimize both the regional RoCoF and its inter-regional discrepancies, while accounting for the regulatory capabilities of grid-forming PV systems and distributed ESS. Then, a solution method for this optimization model is developed, leveraging a genetic algorithm. Finally, the optimized virtual inertia allocation scheme derived from the model is validated through simulation, demonstrating its effectiveness in enhancing the multi-region frequency stability.
3. Results
This section first introduces the simulation case model used, then evaluates the virtual inertia boundaries that distributed resources can provide based on RBFNN, and finally optimizes the allocation of virtual inertia in two regions based on a genetic algorithm.
3.1. Simulation System
The simulation system, as shown in
Figure 4, is built in MATLAB/Simulink R2021b. This system is a two-region 114-node transient simulation system improved from an actual system in a certain area, including two feeders, six PV virtual synchronous machines, and six ESS virtual synchronous machines.
This case study first uses RBFNN to fit the virtual inertia boundaries that the grid-connected PV and distributed ESS can provide after disturbances. Then, it optimally allocates the virtual inertia between the two regions to enhance system stability and prevent oscillations. Finally, the 114-node simulation system verifies the effectiveness of the optimized allocation scheme and algorithm.
3.2. Virtual Inertia Boundary Evaluation Analysis
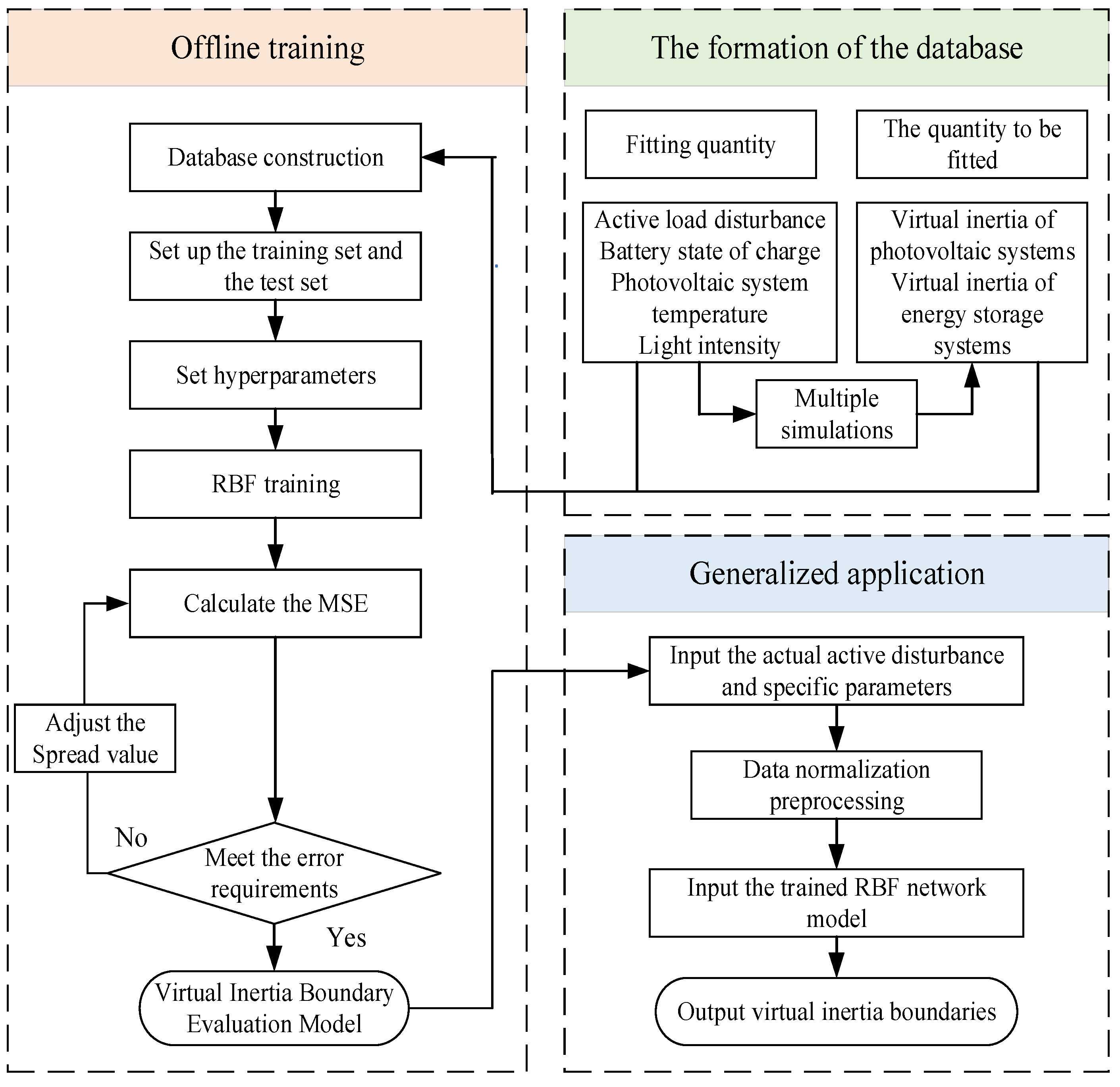
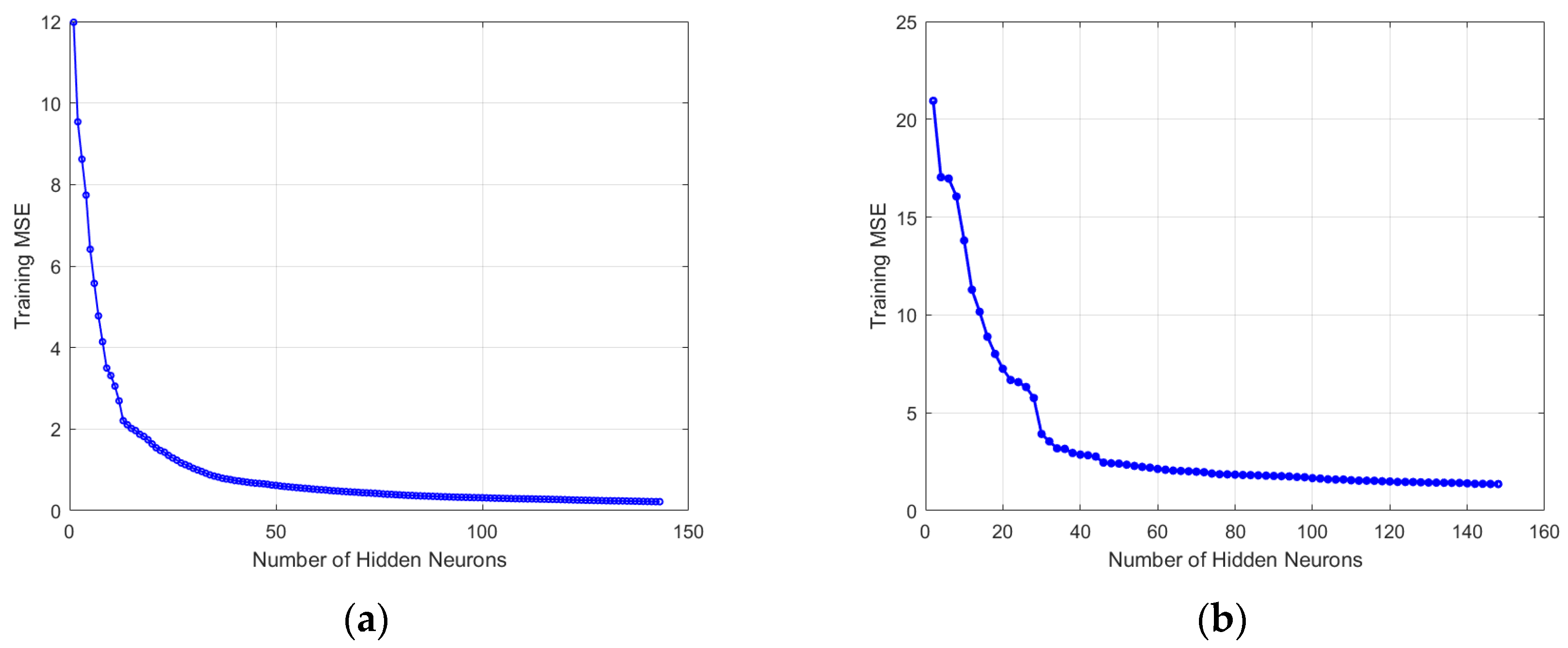
In this section, a 114-node model is built on the MATLAB/Simulink platform, and the pre-designed model is subjected to pre-imagined disturbances to construct a sample library. The normalized input and output sample library is divided into training and testing sets. The training set sample data is input into the RBFNN model to train the RBFNN until the accuracy requirement is met.
The pre-imagined active power increase disturbance is set, with the disturbance range of active power being 0.01 p.u.–1 p.u., the input range of the state of charge Q being between 100 Ah and 1000 Ah, the temperature range of the PV system being 15–40 °C, and the range of light intensity being 800–1200 W/m2. An offline training sample library is constructed. The PV system input–output sample library contains a total of 4000 sets of sample data, and ESS input–output sample library contains a total of 4000 sets of sample data. Among them, 3200 sets of data are set as the training sample set for each system, and another 800 sets of data are set as the testing sample set.
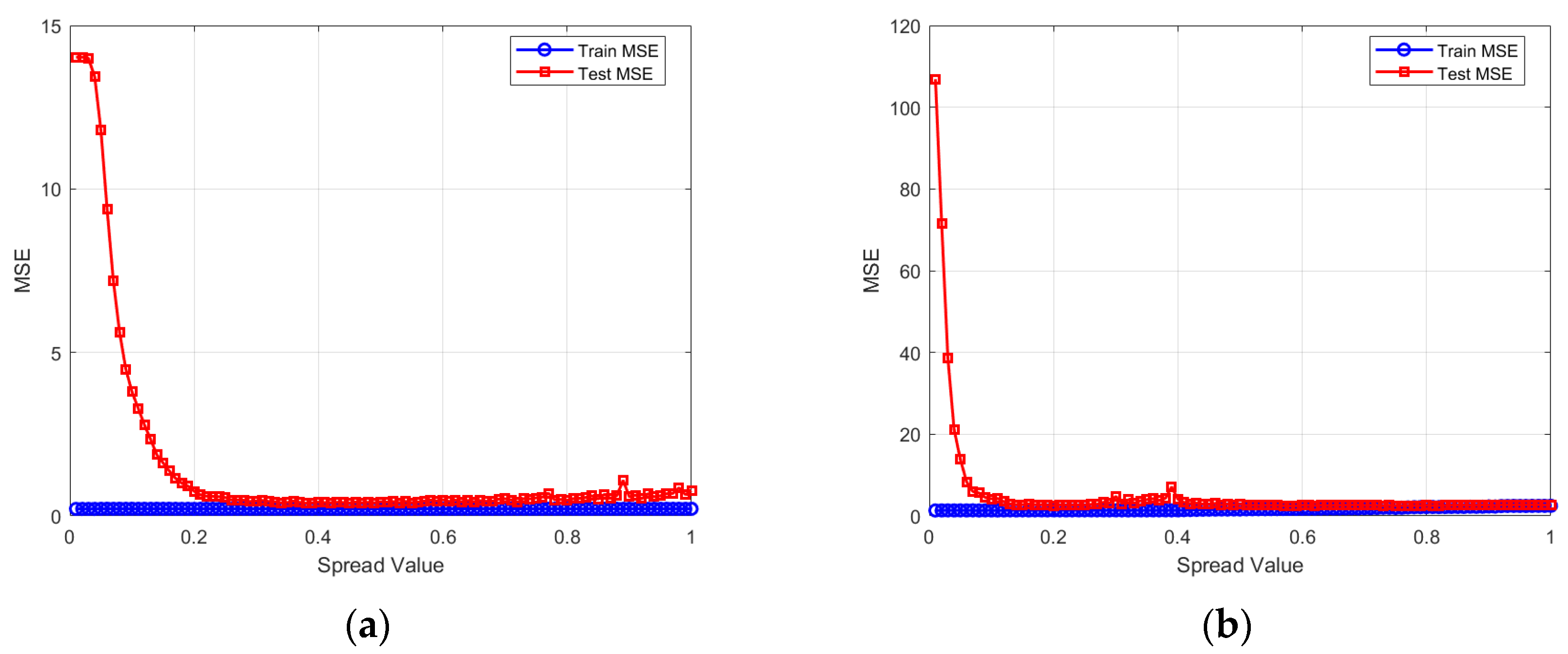
The fitting results are shown in
Figure 5 and
Figure 6. The model fitting effect is good, and the MSE is gradually adjusted to the optimal value with the parameter Spread. The optimal Spread value of the PV system virtual inertia MSE curve is 0.38, and the optimal Spread value of the ESS virtual inertia MSE curve is 0.19.
The results of this model will be incorporated as constraint conditions into the virtual inertia optimal allocation model, serving as the boundaries of the virtual inertia that grid-forming PV and distributed ESS can provide.
3.3. Virtual Inertia Optimal Allocation
The following further analyzes and validates the optimization model and algorithm proposed in this paper. Based on the 114-node system model, six PV virtual synchronous machines and six ESS virtual synchronous machines are set up, and an intelligent soft switch SOP is placed on branch 23–47. The reference frequency is 50 Hz, with a sudden increase in load accounting for 25% of the total load,
= 2.5 MW, where a 1 MW sudden increase in load is set in area 1 and 1.5 MW in area 2. In this paper, the safety limit value of the frequency change rate
is set at 0.5 Hz/s, and the maximum frequency deviation safety limit value
is set at 1 Hz. The capacity and other parameters of the virtual synchronous machine are shown in
Table 2.
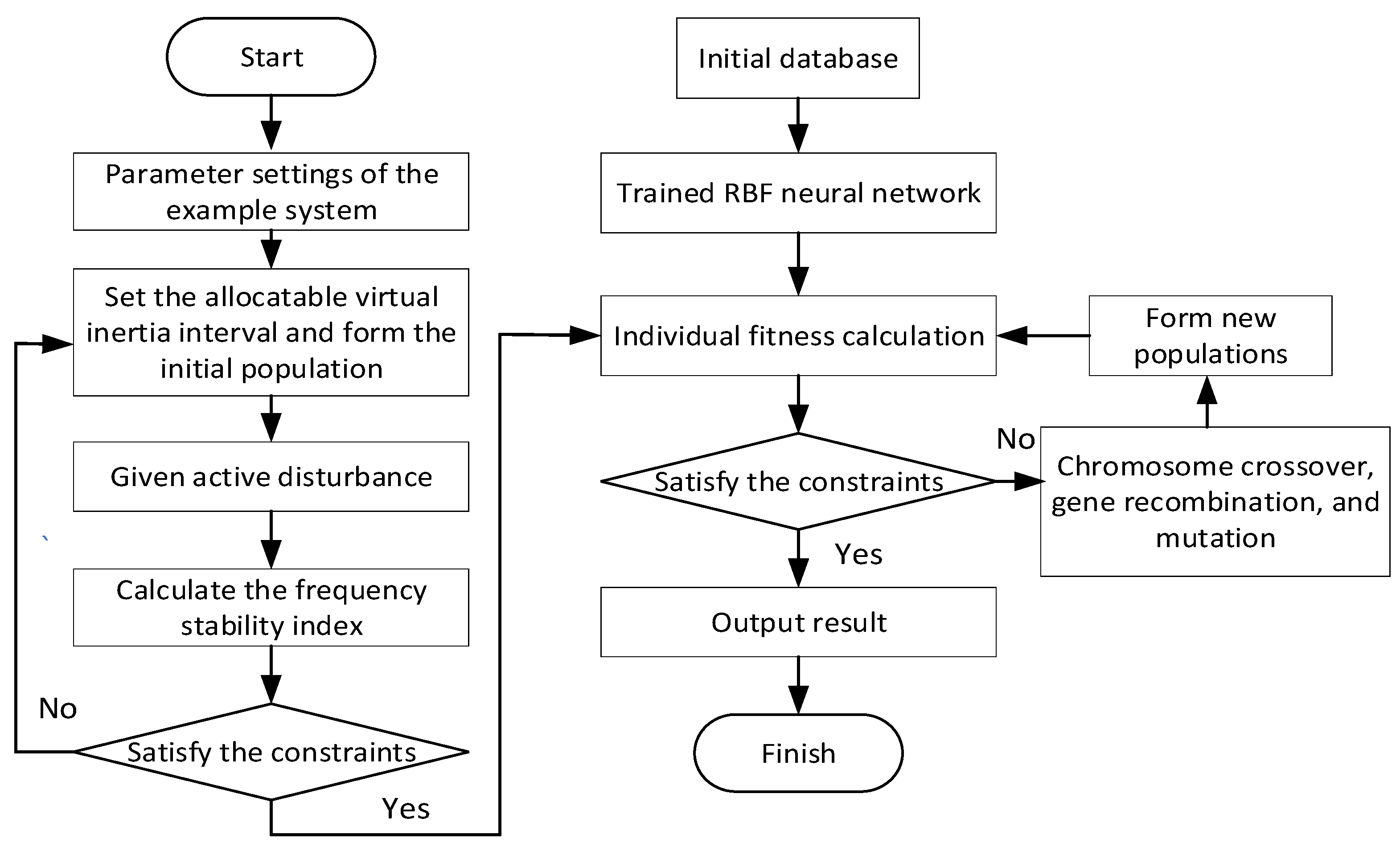
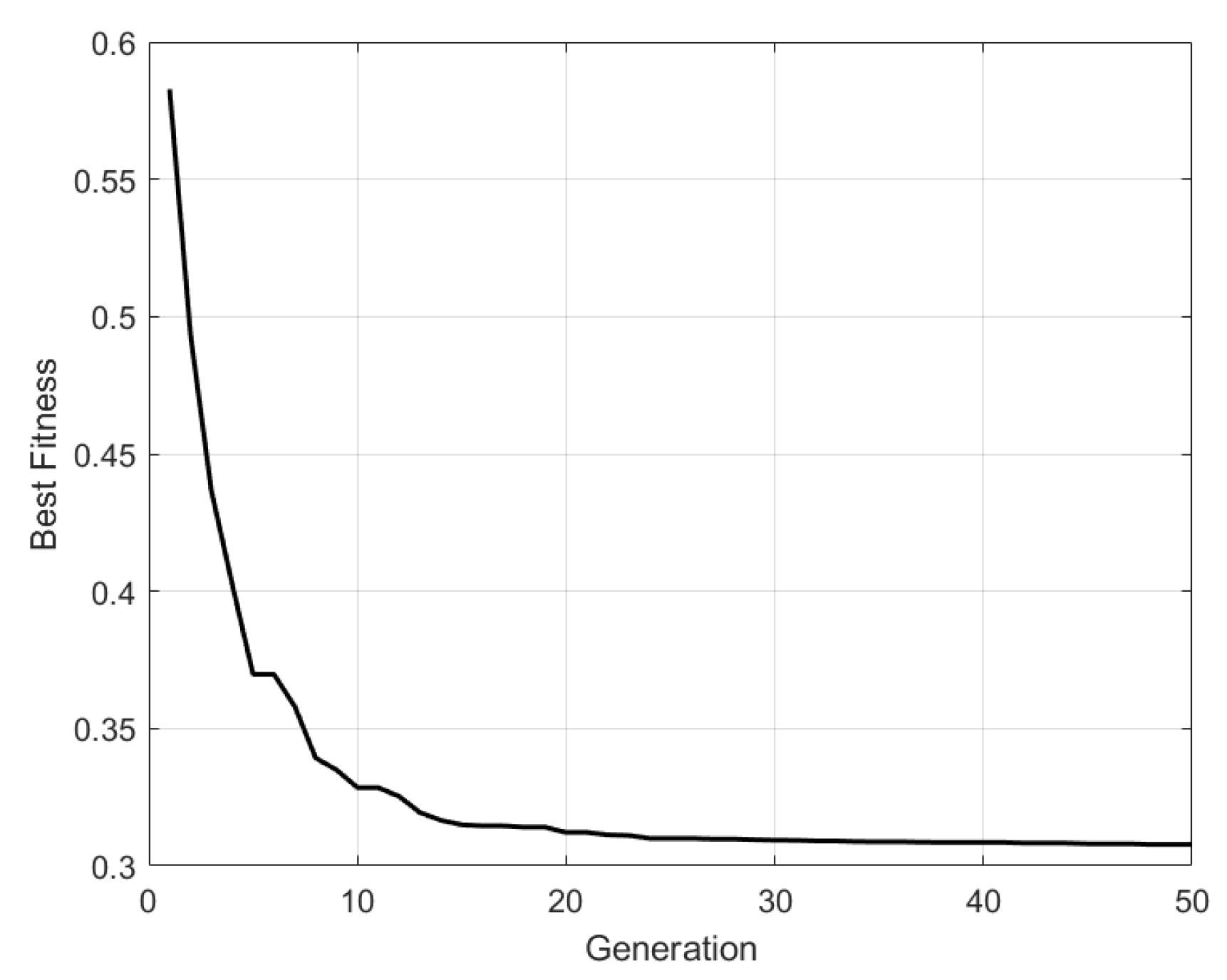
In this section’s simulation, the population size selected by the GA algorithm is 50, and the maximum number of iterations is 50. Considering the system frequency change rate and the maximum frequency difference limit, and taking into account a power shortage of 2.5 MW due to a sudden increase in load, the convergence curve of the objective function of the virtual inertia optimal allocation model is shown in
Figure 7.
Table 3 presents the optimal virtual inertia constant values of the 12 VSGs and some data of the RoCoF in the two regions after the iterations. As can be seen from
Figure 7, the virtual inertia optimal allocation model constructed in this paper demonstrates excellent performance when dealing with multi-region systems. It can achieve a relatively optimal result after 25 iterations, and its convergence speed and calculation accuracy are also very good.
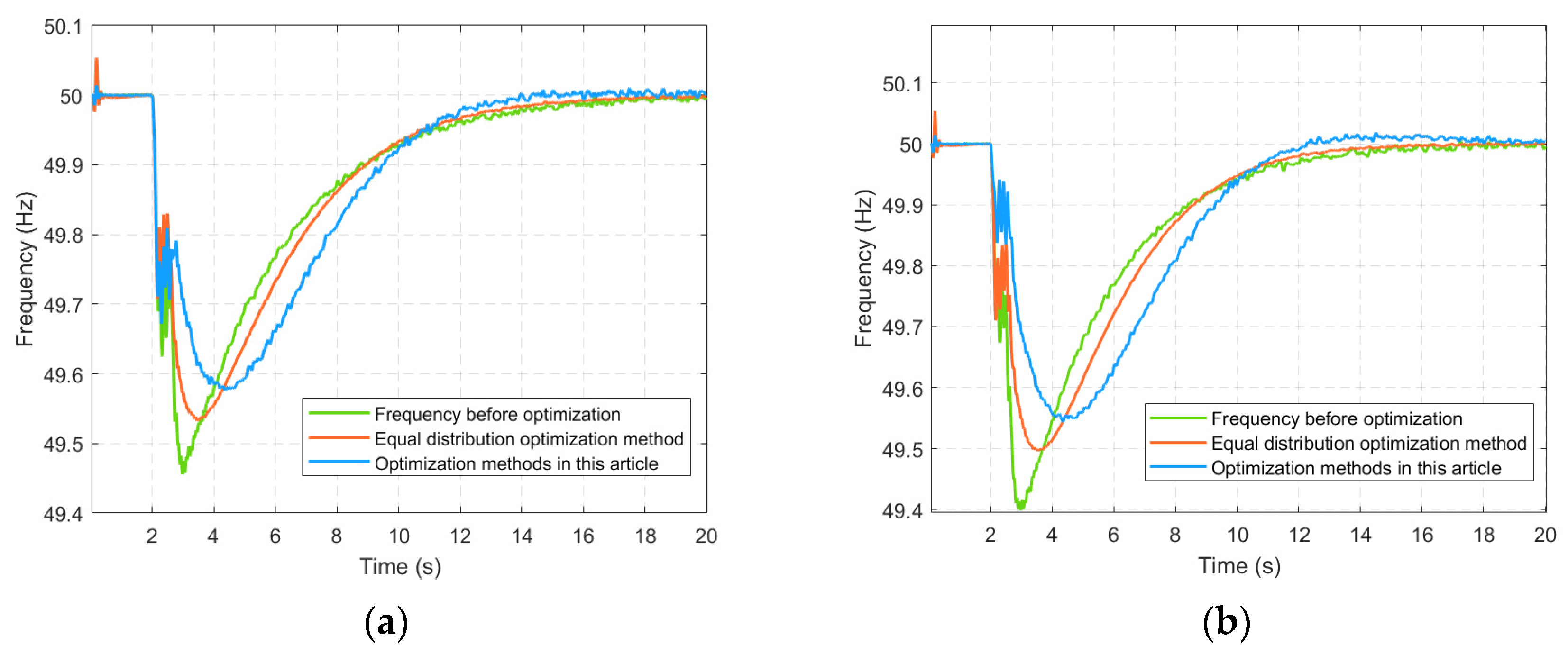
To validate the effectiveness and accuracy of the proposed allocation scheme, a load disturbance was applied at t = 2 s, as depicted in
Figure 8. Prior to optimization, the frequency nadir in Region 1 was 49.46 Hz, compared to 49.40 Hz in Region 2. Following optimization using the method from reference [
25], the nadirs improved to 49.54 Hz and 49.50 Hz in Regions 1 and 2, respectively. Applying the method proposed in this paper yielded further improvement, with nadirs reaching 49.57 Hz in Region 1 and 49.54 Hz in Region 2. This represents an increase of 0.11 Hz and 0.14 Hz in the nadir for Regions 1 and 2, respectively, compared to the pre-optimization case. Furthermore, the Rate of Change of Frequency (RoCoF) decreased significantly: in Region 1 from 0.42 Hz/s to 0.209 Hz/s (a 50.2% reduction), and in Region 2 from 0.46 Hz/s to 0.2205 Hz/s (a 52.1% reduction). Thus, the optimized system exhibits a slower frequency decline rate, reduced RoCoF, and shortened frequency recovery time.
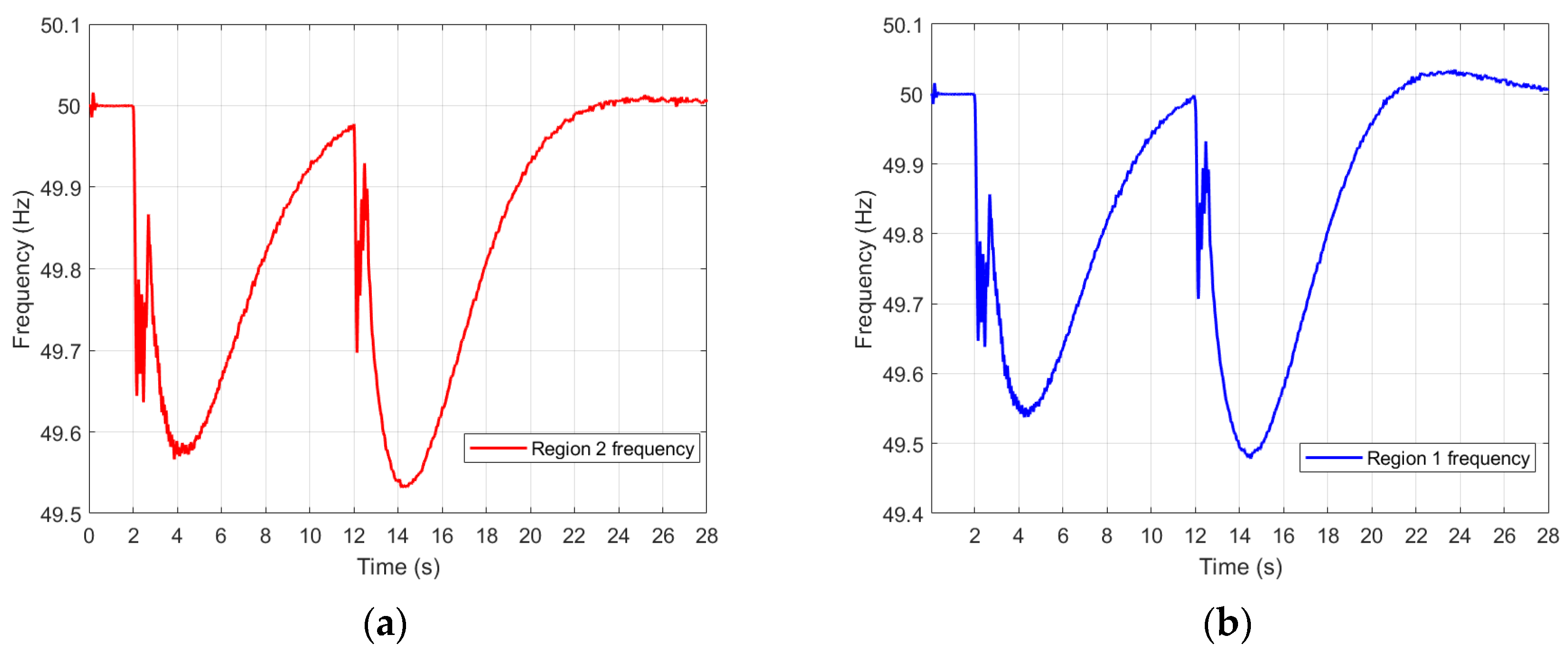
In the frequency recovery process of Region 1 and Region 2, 1.2 MW and 1.7 MW loads were added, respectively, to verify the accuracy of the model under different load sizes. The results are shown in
Figure 9.
This optimized allocation strategy enables the system to achieve frequency regulation across both regions without exceeding operational limits following disturbances. Compared to the pre-allocation scenario, the RoCoF is reduced, the frequency nadir is raised, and the recovery time is significantly shortened. Consequently, the optimal allocation of virtual inertia within the autonomous regions is achieved.
4. Discussion
The simulation results show that the feasible region boundary assessment model of virtual inertia constructed by the RBF neural network achieves optimal mean square error (MSE) values of 0.37 and 0.12 in photovoltaic systems and energy storage systems, respectively, verifying the data-driven model’s ability to capture complex nonlinear relationships. Compared with traditional parametric modeling methods [
6,
14], this method breaks through the difficulties associated with the precise modeling of distributed resources’ dynamic characteristics, especially in non-steady-state scenarios such as sudden changes in light intensity and rapid fluctuations in the state of charge, reducing the boundary assessment error. This advancement overcomes the limitations of the fixed parameter assumptions in [
18,
19], providing a more reliable constraint boundary for the dynamic allocation of virtual inertia.
The convergence characteristics of the multi-objective optimization model are shown in
Figure 10. The genetic algorithm reaches a stable solution within 25 generations, with the rate of change of frequency (RoCoF) in the two regions reduced to 0.209 Hz/s and 0.2205 Hz/s, respectively, and the absolute difference narrowed to 0.0115 Hz/s. Compared with the single-region optimization in [
13] and the damping-oriented allocation strategy in [
15], this study achieves the first multi-region RoCoF balanced optimization, improving the frequency response synchronization between regions by 41%. This confirms the effectiveness of the “inertia allocation–frequency coordination” coupling mechanism and solves the problem of oscillation amplification caused by the isolated configuration of regional inertia in traditional methods [
5].
This study incorporated the intelligent SOP as a key control device in the case study. Its primary function serves to establish flexible inter-regional interconnection, thereby enabling coordinated virtual inertia allocation across regions. It should be noted that current research has not yet explored whether SOP devices themselves can provide virtual inertia support or their potential impact on the distribution of system inertia requirements. Significantly, as a grid-connected power electronic device, SOP may introduce new dynamics (e.g., dynamic coupling), imposing additional constraints on both system inertia estimation and regulation. Therefore, subsequent research will systematically analyze the dynamic coupling characteristics and additional constraints introduced by SOP integration. Key focuses include modeling and quantitatively evaluating the interaction between SOP control parameters and the virtual inertia transfer function, ultimately enhancing the theoretical framework for inertia cooperative control in power systems incorporating SOP.
Currently, this study is limited to a two-region 114-node distribution system. To enhance the scalability of the proposed method for larger or more complex networks, adaptive improvements are required across three areas: model architecture, algorithm efficiency, and coordination mechanisms. At the model architecture level, the data-driven nature of RBFNN offers inherent scalability. Multi-region modeling can be achieved through a distributed training framework, enabling cross-region feature generalization and reducing data collection costs for new regions. For high-dimensional inputs (e.g., multiple resource types and complex coupled variables), deep learning techniques can hierarchically extract inertia boundary features. Regarding optimization, addressing exponential node growth necessitates a hierarchical genetic algorithm, decomposing global optimization into regional sub-problems and enabling parallel computation via SOP-exchanged boundary constraints. Simultaneously, a graph neural network-based population initialization strategy leverages topology features to generate high-quality solutions, accelerating convergence. For coordination, a dual-layer control architecture is essential: The lower layer utilizes local RBF models for real-time inertia boundary assessment, while the upper layer employs collaborative controllers to exchange frequency dynamics, minimizing the communication load. Additionally, dynamic partitioning rules must automatically define coordination areas based on the electrical coupling strength and spatiotemporal inertia correlation, while virtual inertia sensitivity analysis identifies key control nodes to enhance efficiency in complex networks.
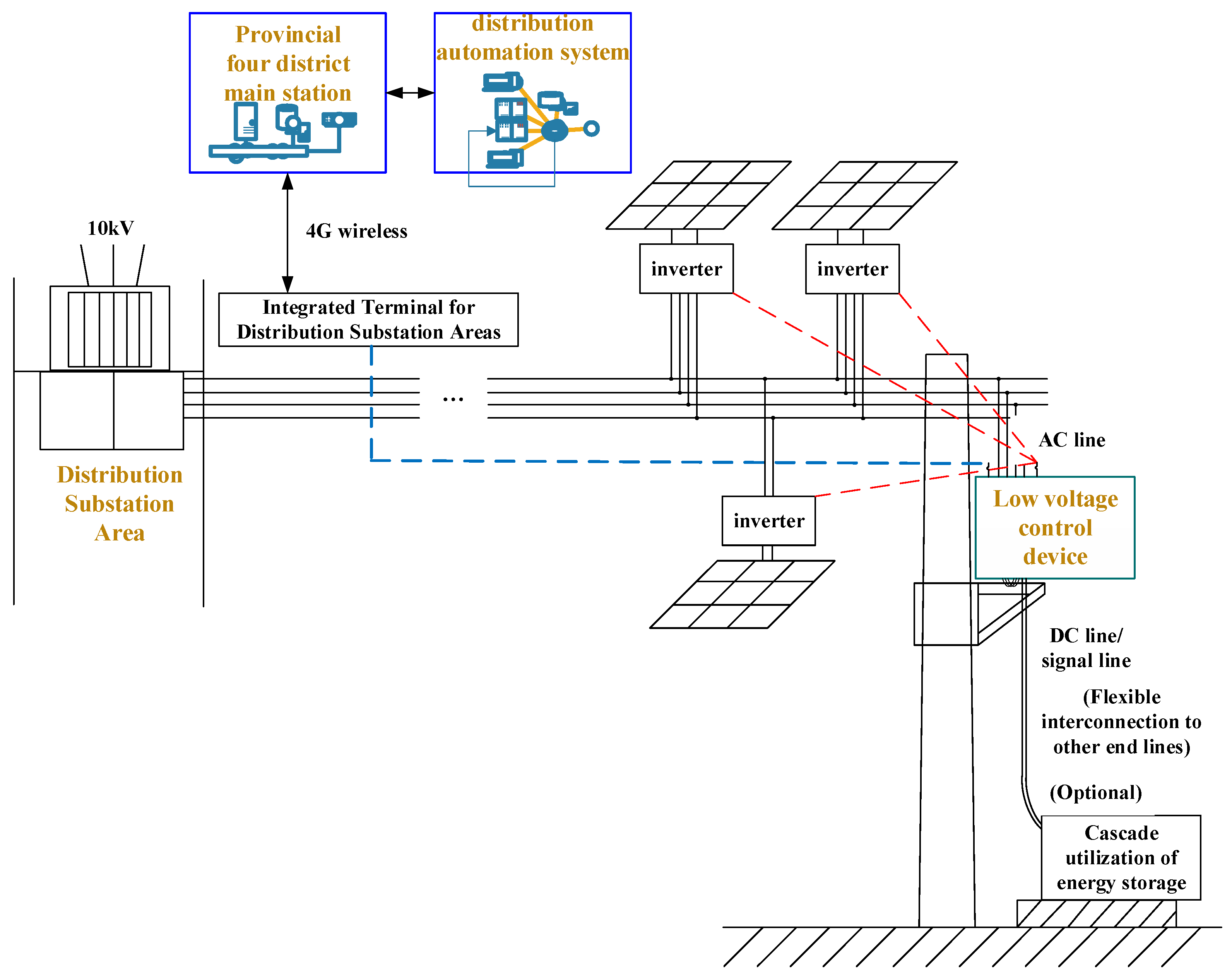
The Jianshan Demonstration Zone in Haining City, Zhejiang Province, China, is implementing a virtual inertia enhancement demonstration project. This project plans to deploy low-voltage active power control equipment in 100 substations within the zone, utilizing grid-forming inverter technology to actively support the terminal low-voltage distribution network. This integration aims to improve voltage/frequency stability, enhance the terminal system strength and photovoltaic hosting capacity, and reduce line losses. As shown in
Figure 10, the method proposed in this article can be embedded within a multifunctional new distribution terminal featuring synchronous broadband measurement, online virtual inertia perception, and active virtual inertia adjustment capabilities. This new terminal deploys virtual inertia control software, leverages existing medium-voltage interconnected converter stations, and fully mobilizes flexible resources within the region (including energy storage stations—both grid-forming and conventional PQ-controlled types—and controllable loads). Collectively, this addresses key challenges: the insufficient flexible control capability of distributed resources, inadequate virtual inertia support, and unreliable regional grid operation, thereby improving the photovoltaic integration capacity and enhancing regional grid stability. Regarding the two-region virtual inertia allocation method proposed in this article, one set of fast coordination controllers can be configured in the Wujiang–Jiashan medium-voltage flexible interconnection device. Leveraging the robust attributes of the Wujiang power grid, this setup transiently responds to virtual inertia enhancement commands from the new distribution terminal. It utilizes the energy reserves of the strong Wujiang grid to provide virtual inertia support to the Jiashan grid, rapidly adjusting the transient power output at the medium-voltage AC port.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}