

Structural Health Monitoring of Aerial Vehicles Using Guided Electromagnetic Waves in K-Band: Initial Damage Detection Results from Drone Flight Testing


 ,
,  ,
,  and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Experimental Setup
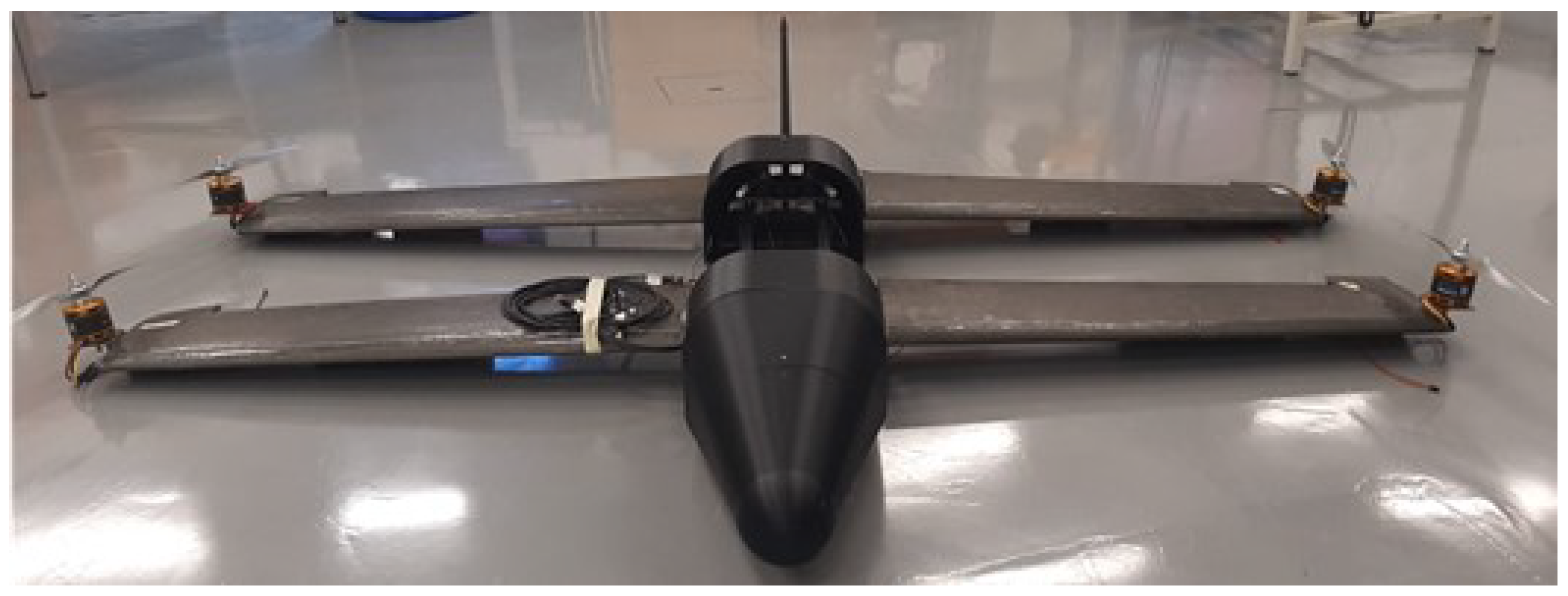
2.1. Autonomous Heavy Lift Drone
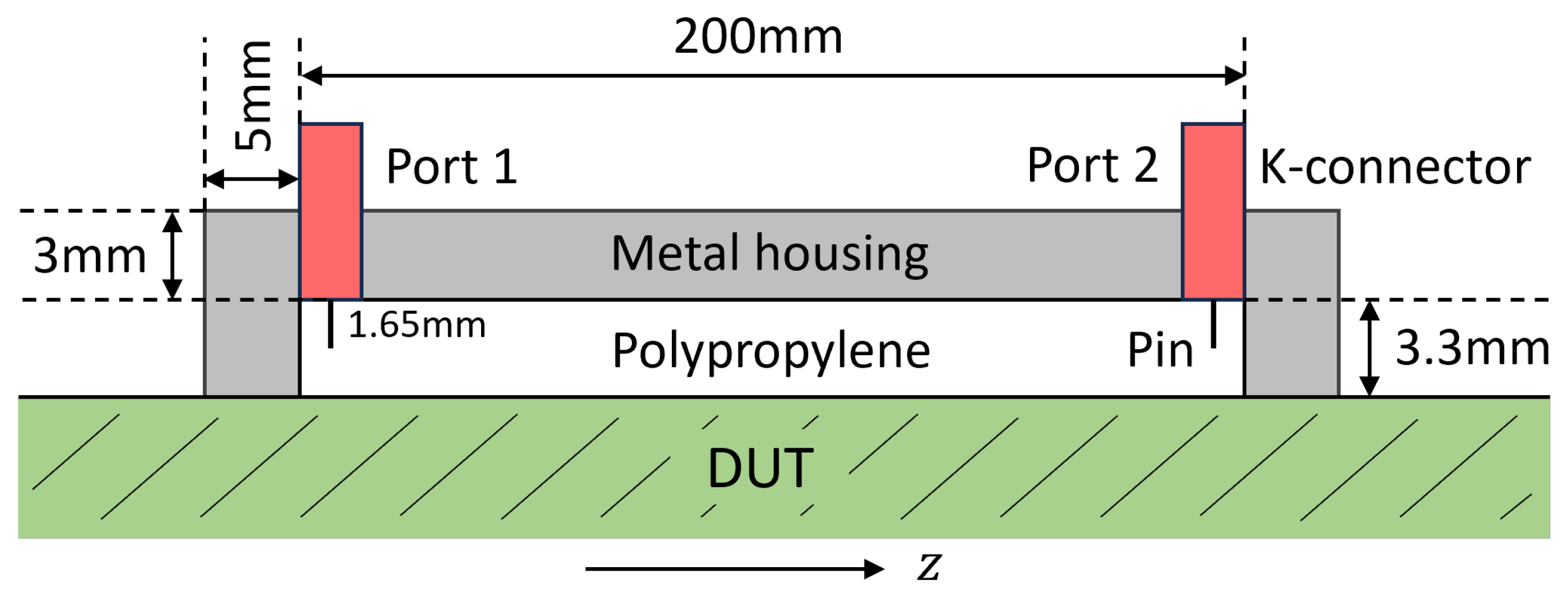
2.2. Design, Realization, and Characterization of the Dielectric Waveguide
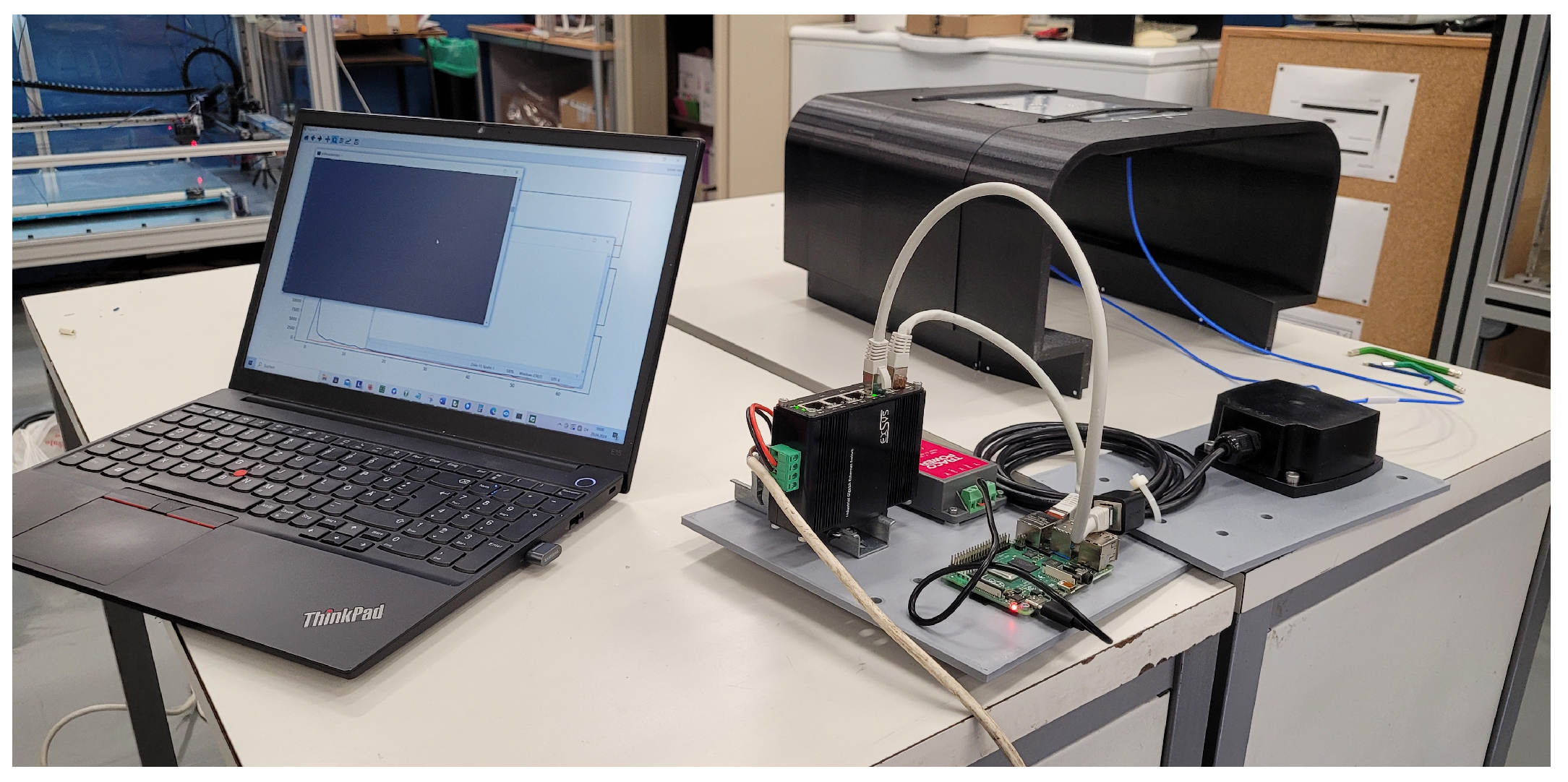
2.3. Data Acquisition and Analysis
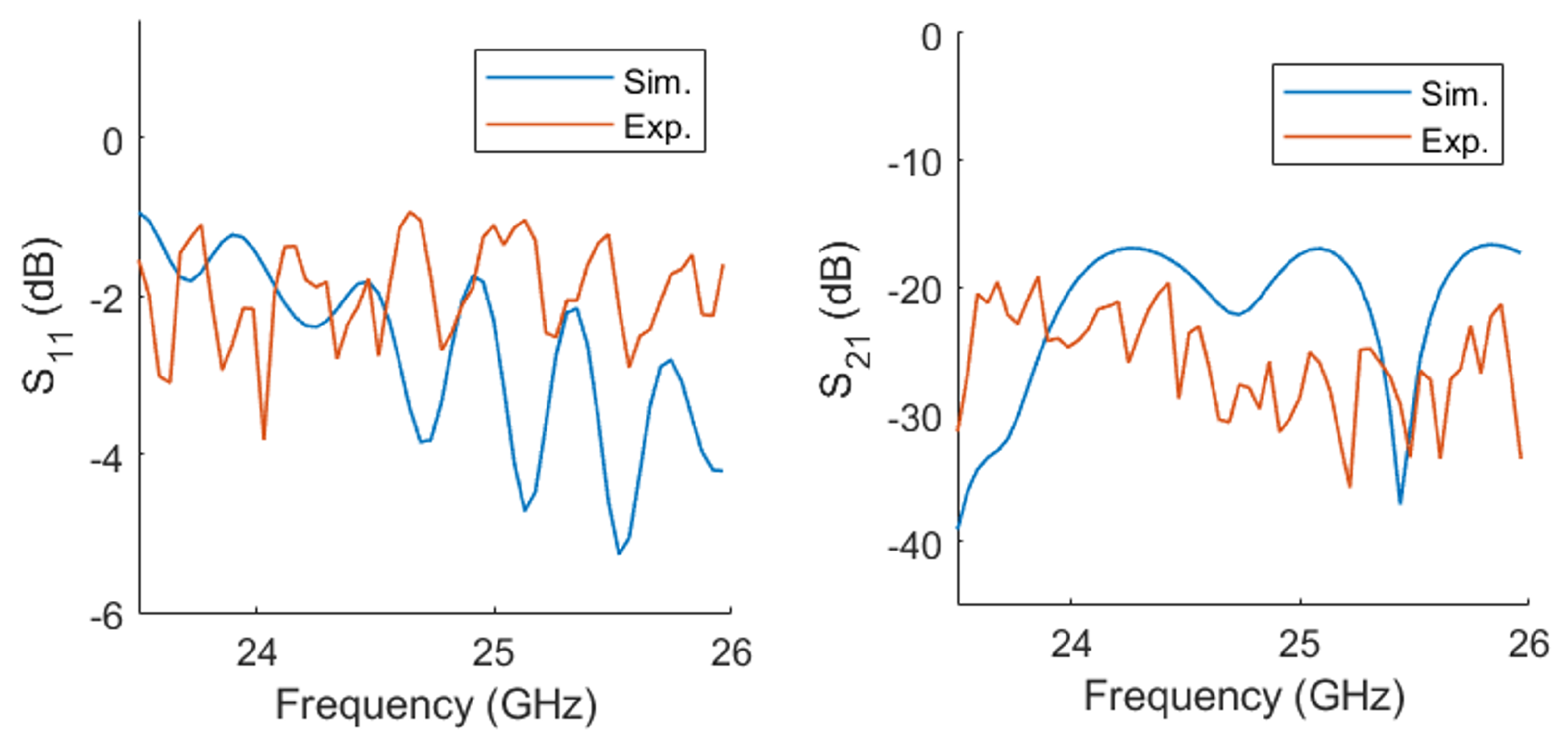
3. Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| DUT | Device under test; |
| EW | Electromagnetic wave; |
| SHM | Structural health monitoring; |
| UAV | Unmanned aerial vehicle. |
References
- Rao, M.E.; Simon, J.; Moll, J.; Schütz, M.F. Real-time onboard propeller fault diagnosis of autonomous delivery drones through vibration analysis. Struct. Health Monit. 2025, 14759217251327224. [Google Scholar] [CrossRef]
- Ghazali, M.H.M.; Rahiman, W. Vibration-Based Fault Detection in Drone Using Artificial Intelligence. IEEE Sens. J. 2022, 22, 8439–8448. [Google Scholar] [CrossRef]
- Liu, W.; Chen, Z.; Zheng, M. An Audio-Based Fault Diagnosis Method for Quadrotors Using Convolutional Neural Network and Transfer Learning. In Proceedings of the 2020 American Control Conference (ACC), Denver, CO, USA, 1–3 July 2020; pp. 1367–1372. [Google Scholar] [CrossRef]
- Soria Gomez, M.; Koschlik, A.K.; Arts, E.; Raddatz, F. Non-destructive evaluation of the condition of a UAV’s propellers by means of acoustics. In Proceedings of the NDE 4.0, Predictive Maintenance, and Communication and Energy Systems in a Globally Networked World, Long Beach, CA, USA, 6 March–11 April 2022; Meyendorf, N.G., Niezrecki, C., Farhangdoust, S., Eds.; SPIE: Bellingham, WA, USA, 2022; p. 19. [Google Scholar] [CrossRef]
- Kharkovsky, S.; Zoughi, R. Microwave and millimeter wave nondestructive testing and evaluation - Overview and recent advances. IEEE Instrum. Meas. Mag. 2007, 10, 26–38. [Google Scholar] [CrossRef]
- Moll, J. Guided electromagnetic waves for damage detection and localization in metallic plates: Numerical and experimental results. Int. J. Microw. Wirel. Technol. 2020, 12, 455–460. [Google Scholar] [CrossRef]
- Memmolo, V.; Moll, J.; Moix Bonet, M.; Schmidt, D.; Krozer, V. Ultra-wideband microwave leakage monitoring for stringer debonding detection in carbon composite fuselage structures. NDT E Int. 2024, 142, 103006. [Google Scholar] [CrossRef]
- Liu, L.; Ju, Y. A high-efficiency nondestructive method for remote detection and quantitative evaluation of pipe wall thinning using microwaves. NDT E Int. 2011, 44, 106–110. [Google Scholar] [CrossRef]
- Sasaki, K.; Katagiri, T.; Yusa, N.; Hashizume, H. Demonstration of the Applicability of Nondestructive Microwave Testing to the Long-Range Inspection of Inner-Surface Cracks in Tubes. Mater. Trans. 2017, 58, 692–696. [Google Scholar] [CrossRef]
- Chen, G.; Katagiri, T.; Song, H.; Yusa, N.; Hashizume, H. Detection of cracks with arbitrary orientations in a metal pipe using linearly-polarized circular TE11 mode microwaves. NDT E Int. 2019, 107, 102125. [Google Scholar] [CrossRef]
- Abbasi, K.; Ito, S.; Hashizume, H. Microwave Detection of Longitudinal Crack and Identification of Its Location in Straight Pipe. J. Power Energy Syst. 2008, 2, 538–544. [Google Scholar] [CrossRef]
- Chen, G.; Katagiri, T.; Yusa, N.; Hashizume, H. In-pipe crack detection for multiple diameters using TE11 mode microwaves. Int. J. Appl. Electromagn. Mech. 2020, 64, 39–46. [Google Scholar] [CrossRef]
- Sasaki, K.; Katagiri, T.; Yusa, N.; Hashizume, H. Experimental verification of long-range microwave pipe inspection using straight pipes with lengths of 19–26.5 m. NDT E Int. 2018, 96, 47–57. [Google Scholar] [CrossRef]
- Chen, G.; Katagiri, T.; Yusa, N.; Hashizume, H. Design of a dual-port, side-incident microwave probe for detection of in-pipe damage. Meas. Sci. Technol. 2020, 31, 125001. [Google Scholar] [CrossRef]
- Chen, G. Investigation of the effect of a bend on pipe inspection using microwave NDT. NDT E Int. 2020, 110, 102208. [Google Scholar] [CrossRef]
- Katagiri, T.; Chen, G.; Yusa, N.; Hashizume, H. Demonstration of detection of the multiple pipe wall thinning defects using microwaves. Measurement 2021, 175, 109074. [Google Scholar] [CrossRef]
- Chen, G.; Guo, Y.; Katagiri, T.; Song, H.; Tomizawa, T.; Yusa, N.; Hashizume, H. Multivariate probability of detection (POD) analysis considering the defect location for long-range, non-destructive pipe inspection using electromagnetic guided wave testing. NDT E Int. 2021, 124, 102539. [Google Scholar] [CrossRef]
- Rao, M.E.; Memmolo, V.; Moll, J.; Krozer, V. Structural Health Monitoring of Aerospace Structures using Guided Electromagnetic Waves in a Dielectric Waveguide at Ka-Band. E-J. Nondestruct. Test. 2024, 29. [Google Scholar] [CrossRef]
- Pozar, D.M. Microwave Engineering, 4th ed.; Wiley: Hoboken, NJ, USA, 2012. [Google Scholar]
- Jie, H.; Zhao, Z.; Li, H.; Gan, T.H.; See, K.Y. A Systematic Three-Stage Safety Enhancement Approach for Motor Drive and Gimbal Systems in Unmanned Aerial Vehicles. IEEE Trans. Power Electron. 2025, 40, 9329–9342. [Google Scholar] [CrossRef]
- Jie, H.; Zhao, Z.; Zeng, Y.; Chang, Y.; Fan, F.; Wang, C.; See, K.Y. A review of intentional electromagnetic interference in power electronics: Conducted and radiated susceptibility. IET Power Electron. 2024, 17, 1487–1506. [Google Scholar] [CrossRef]
- Blond, K.; O’Brien, T.; Thompson, N.; Piotrowski, D.; Clark, A. Comparative Vacuum Monitoring Solutions to Advance U.S. Air Force KC-46A Condition-Based Maintenance Plus. Aerospace 2023, 10, 587. [Google Scholar] [CrossRef]
- Simoncelli, M.; Zucca, M.; Ghilardi, M. Structural health monitoring of an onshore steel wind turbine. J. Civ. Struct. Health Monit. 2024, 14, 1423–1437. [Google Scholar] [CrossRef]
- Chang, S.; Deng, Y.; Zhang, Y.; Zhao, Q.; Wang, R.; Zhang, K. An Advanced Scheme for Range Ambiguity Suppression of Spaceborne SAR Based on Blind Source Separation. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5230112. [Google Scholar] [CrossRef]
- Hussain, M.; Zahra, H.; Abbas, S.M.; Zhu, Y. Flexible Dielectric Materials: Potential and Applications in Antennas and RF Sensors. Adv. Electron. Mater. 2024, 10, 2400240. [Google Scholar] [CrossRef]
- Gorgin, R.; Luo, Y.; Wu, Z. Environmental and operational conditions effects on Lamb wave based structural health monitoring systems: A review. Ultrasonics 2020, 106114. [Google Scholar] [CrossRef]
- Mueller, I.; Memmolo, V.; Tschöke, K.; Moix-Bonet, M.; Möllenhoff, K.; Golub, M.; Venkat, R.S.; Lugovtsova, Y.; Eremin, A.; Moll, J. Performance Assessment for a Guided Wave-Based SHM System Applied to a Stiffened Composite Structure. Sensors 2022, 22, 7529. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mälzer, M.; Simon, J.; Günner, C.; del Rio Velilla, D.; Rao, M.; Beck, S.; Memmolo, V.; Moll, J.; Krozer, V. Structural Health Monitoring of Aerial Vehicles Using Guided Electromagnetic Waves in K-Band: Initial Damage Detection Results from Drone Flight Testing. Appl. Sci. 2025, 15, 6478. https://doi.org/10.3390/app15126478
Mälzer M, Simon J, Günner C, del Rio Velilla D, Rao M, Beck S, Memmolo V, Moll J, Krozer V. Structural Health Monitoring of Aerial Vehicles Using Guided Electromagnetic Waves in K-Band: Initial Damage Detection Results from Drone Flight Testing. Applied Sciences. 2025; 15(12):6478. https://doi.org/10.3390/app15126478
Chicago/Turabian StyleMälzer, Moritz, Jonas Simon, Carsten Günner, Daniel del Rio Velilla, Manuel Rao, Sebastian Beck, Vittorio Memmolo, Jochen Moll, and Viktor Krozer. 2025. "Structural Health Monitoring of Aerial Vehicles Using Guided Electromagnetic Waves in K-Band: Initial Damage Detection Results from Drone Flight Testing" Applied Sciences 15, no. 12: 6478. https://doi.org/10.3390/app15126478
APA StyleMälzer, M., Simon, J., Günner, C., del Rio Velilla, D., Rao, M., Beck, S., Memmolo, V., Moll, J., & Krozer, V. (2025). Structural Health Monitoring of Aerial Vehicles Using Guided Electromagnetic Waves in K-Band: Initial Damage Detection Results from Drone Flight Testing. Applied Sciences, 15(12), 6478. https://doi.org/10.3390/app15126478