1. Introduction
Magnetic dipole source detection and parameter estimation, including position parameters, magnetic moment magnitude, and direction parameters, are critical issues in magnetic anomaly detection [
1,
2]. This technology has been extensively applied in underwater target detection [
3,
4], unexploded ordnance (UXO) detection [
5,
6], naval mine detection [
7], geomagnetic assisted matching navigation [
8,
9], archaeology [
10], and biomedical fields [
11,
12]. Research has demonstrated that when the distance between the target source and the measurement point exceeds 2.5 times the size of the target source, the source can be modeled as a magnetic dipole. This approximation is suitable for most “far-field” detection scenarios, such as underwater target detection and UXO detection [
13,
14]. With this understanding, the detection, localization, and parameter estimation of magnetic sources can be simplified to those of magnetic dipole sources. Despite magnetic anomaly detection being largely unaffected by environmental media, challenges persist, including weak target anomaly responses and complex background magnetic noise. These challenges contribute to low precision in target magnetic source localization and identification and reduce the convergence performance of optimization algorithms [
15]. Addressing how to achieve high-precision localization and magnetic moment parameter inversion of target magnetic dipoles under strong noise interference remains vital in enhancing the accuracy and robustness of magnetic dipole parameter estimation.
Currently, magnetic dipole source parameter estimation is primarily divided into two parts: estimation of source position and estimation of source magnetic moment parameters. Wynn et al. [
16] utilized the magnetic tensor field, independently measured by a superconducting magnetic gradiometer and an array magnetic measurement system, to determine the position of the dipole target using the eigenvector method, achieving dipole source localization. Nara et al. [
17] derived a closed-form formula for the precise localization of dipole sources based on the measured magnetic gradient tensor field of the target source without the need to know the orientation of the target source. Wieger et al. [
18] introduced the Scalar Triangulation And Ranging (STAR) method, which employs a cubic magnetic gradient tensor array for multi-point contraction to locate ferromagnetic targets. The STAR method facilitates immediate target localization and is unaffected by fluctuations in the Earth’s magnetic field; however, the spherical assumption of the tensor invariant introduces inherent non-spherical errors. Researchers have proposed various methods to address these errors. Lin et al. [
19] proposed a STAR method that compensates for real-time direction and distance errors. However, the iterative process of the STAR method still encounters convergence difficulties in specific directions and numerical errors. Du et al. [
20] proposed a robust calibration and localization method for magnetic gradient tensor measurement systems, which enhances the calibration accuracy of the magnetometer array through multi-invariant constraint calibration technology and improves the localization robustness for non-cooperative targets by adaptively selecting multiple pairs of magnetic gradient tensors combined with the Levenberg–Marquardt algorithm optimization. Clark et al. [
21] introduced a source localization technique called Normalized Source Strength (NSS), based on the eigenvalues of magnetic gradient tensor data. This technique allows the localization results to be independent of the target source’s magnetization direction, enabling the unique determination of the target source’s position. Methods based on NSS have been extensively used for localizing magnetic dipole targets [
22,
23]. With advances in computer technology and artificial intelligence, neural networks and deep learning techniques have increasingly been applied to the localization and identification of magnetic dipole targets. Cardenas et al. [
24] recognized and localized magnetic dipole target sources using a coupled network model of YOLO and DenseNet. They demonstrated the potent capabilities of artificial intelligence technology in addressing magnetic dipole source recognition and localization challenges. Miao et al. [
25] employed a super-resolution deep neural network to calculate super-resolution NSS combined with an initial rough trust region reflection optimization algorithm to estimate target position parameters.
In addition to the position information of magnetic dipole sources, estimating the magnetic moment parameters of magnetic dipoles is a critical issue of interest to researchers. This estimation aids in the subsequent identification and classification of magnetic dipoles. Yin et al. [
26] utilized improved tilt angles and normalized magnetic source intensity technology to estimate the position of the target source. They then employed magnetic tensor gradient data and optimization models to estimate the magnetic dipole source’s magnetic moment parameters. Ding et al. [
27] combined magnetic gradient tensor data with normalized magnetic source intensity and the differential evolution (DE) algorithm to fully estimate the number, position, and magnetic moment of magnetic dipole sources. Ge et al. [
28] introduced the VMGT2 angle concept, which determines the number of magnetic sources by mapping the L2 norm of the vertical magnetic gradient tensor onto the arctan function. They combined the differential evolution (DE) algorithm with the LM algorithm to optimize magnetic source parameters. Ge et al. [
29] proposed a new method for the detection, localization, and classification of multiple magnetic dipole sources (DLCMMS), achieving joint parameter optimization of magnetic source number, position, and magnetic moment parameters under the cooperative co-evolution (CC) framework, with high recognition accuracy under noise-free conditions. These methods are based on magnetic gradient tensor data, and the measurement instruments are relatively complex and costly. Since the data often contains high-frequency noise and calculating the magnetic gradient tensor from scalar data involves taking unstable second-order derivatives, using scalar data to estimate the position and parameters of magnetic dipole sources is also an essential direction for magnetic source parameter estimation. Scalar measurements are often more accurate than vector and gradient tensor measurements [
30]. Kolster et al. [
31] proposed a recursive differential inversion combined with the Gaussian–Newton method, which can directly estimate the parameters of magnetic dipole sources without additional processing in the presence of external noise and sensor attitude changes. Wigh et al. [
32] achieved parameter estimation of the ellipsoidal model and actual UXO data under the framework of probabilistic inversion using the ellipsoidal dipole model.
Despite significant advancements in magnetic dipole source parameter estimation over recent decades, few scholars have examined the accuracy and stability of these estimates under conditions of substantial interference. Improving the accuracy of magnetic dipole source parameter estimation under strong magnetic interference conditions is a vital issue for the practical application of this technology. Magnetic anomaly detection (MAD) technology primarily studies how to achieve target anomaly detection under strong noise conditions, and a variety of detection methods have been developed, including orthogonal basis decomposition, stochastic resonance, entropy filters, higher-order cross methods, and modal decomposition [
33,
34,
35,
36,
37,
38]. The most common method is the orthogonal basis function method (OBF) proposed by Ginzburg et al. [
33] in 2002, which decomposes the magnetic anomaly data within a sliding window into three sets of orthogonal basis functions. It then uses the square sum of the function coefficients as the detection basis to achieve target anomaly detection. This method is easy to implement and highly efficient in computation, making it suitable for real-time detection applications. Wang et al. [
39] extended the OBF method to two-dimensional situations using a two-dimensional sliding window. They calculated the square sum of the five independent orthogonal basis components of magnetic dipole sources under strong noise conditions as the energy function to achieve efficient magnetic anomaly detection in two-dimensional situations.
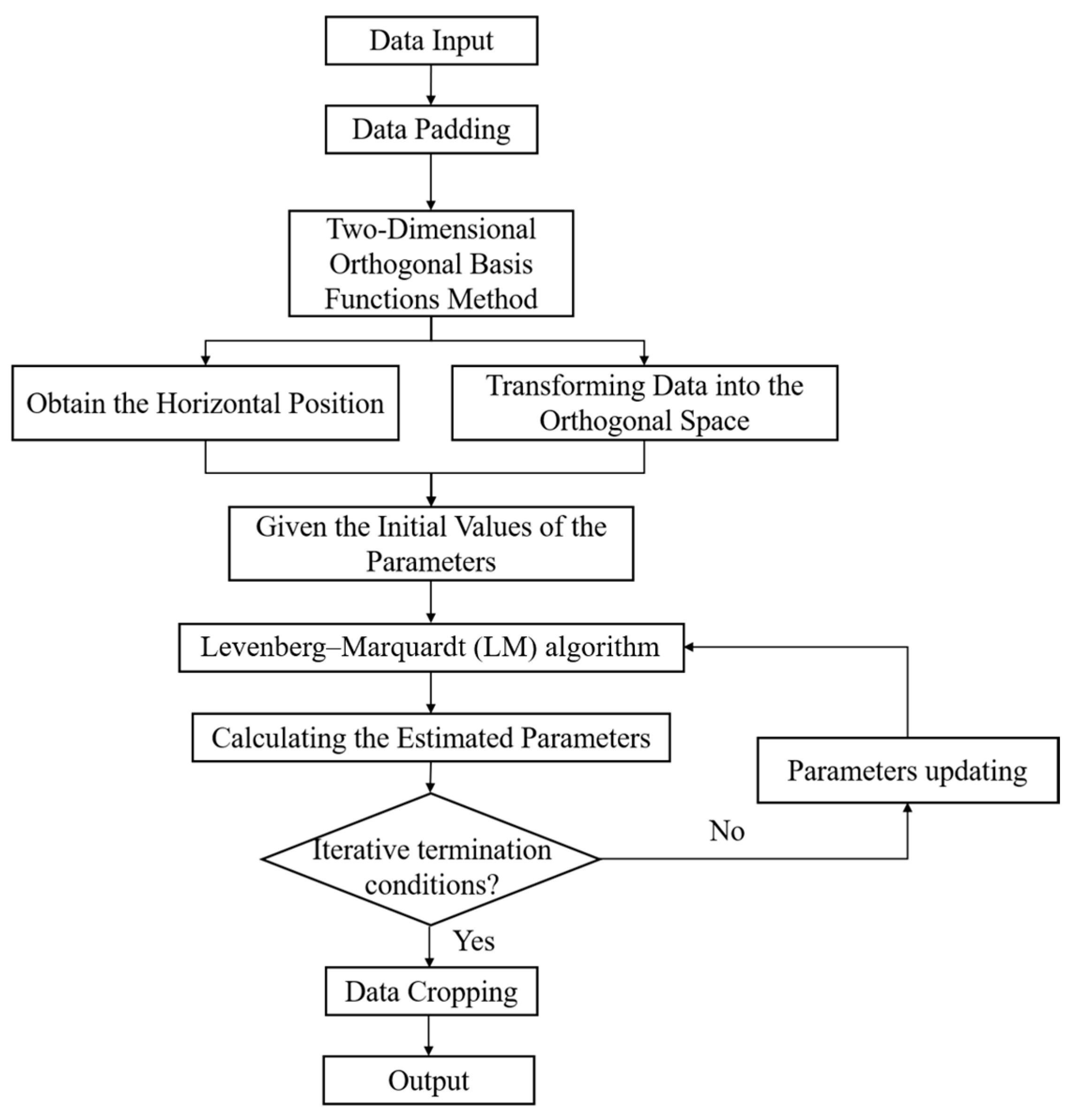
This study proposes a new method based on the LM-OBF algorithm to address the inability to estimate magnetic dipole source parameters under low SNR conditions and enhance the robustness of magnetic dipole source parameter estimation. This method transforms the measured magnetic anomaly values into orthogonal space using the Gram–Schmidt orthogonalization process, calculates the coefficient energy square sum as the forward model using orthogonal basis functions and magnetic anomaly values, and then determines the objective function required for parameter optimization within the least squares framework. Following this, the objective function is optimized using the LM algorithm to achieve accurate parameter estimation of the magnetic dipole source. The proposed method is tested on synthetic models and actual measured data, demonstrating that the LM-OBF algorithm can accurately estimate the parameters of magnetic dipole sources under low SNR conditions. This study makes several significant contributions to the field of magnetic dipole source parameter estimation: (1) It introduces a novel LM-OBF algorithm that accurately estimates the parameters of the target source directly under low SNR conditions without any denoising treatment, a rarity in previous studies. (2) It is the first to combine the OBF method with traditional optimization methods, verifying the algorithm’s effectiveness in synthetic models and actual measured data and providing new ideas for developing magnetic dipole parameter estimation methods based on other MAD methods in the future.
4. Field Data Test
The experiment was conducted at a site in Changchun City, Jilin Province, China, with the test area covering 12 × 11 m. This experiment simulated a realistic measurement scenario of unexploded ordnance (UXO) targets using an unmanned aerial vehicle (UAV) magnetic survey system. The magnetic measurement platform utilized was a multi-rotor airborne magnetic survey system, and the flight platform was a DJI M300 RTK multi-rotor UAV designed for autonomous flight along a pre-planned flight path with enhanced flight stability. The measurement instrument was a compact, high-precision rubidium optically pumped scalar magnetometer with a maximum sampling rate of 10 Hz. The UXO target consisted of a safely deactivated 122 mm caliber artillery shell casing buried at a depth of approximately 0.7 m to simulate an actual measurement site. The UAV magnetic survey system maintained a flight height of 1 m, a flight speed of 1 m/s, and a line spacing of 1 m, and the sampling rate of the magnetometer was set at 10 Hz to ensure high data quality.
Figure 11 illustrates a schematic of the UXO target and the raw magnetic anomalies measured without processing (the actual coordinates have been replaced by distances).
Figure 12 depicts the schematic diagram of the UAV aerial magnetic system and the simulated UXO target. The measured magnetic anomalies were processed to isolate the magnetic anomalies attributable only to the target. Utilizing the International Geomagnetic Reference Field (IGRF), the local normal geomagnetic field was calculated at 55,148 nT. The team subtracted this normal field value from the measurement data to eliminate the geomagnetic background field. In addition, they subtracted the mean value of the data to ensure that the average baseline of the anomaly data was zero. The processed data are displayed in
Figure 13.
Table 7 provides the known parameter information of the artillery shell target, while
Table 8 compares the parameter estimation results of the LM-OBF method to two other ones. The parameter estimation results demonstrate that the LM-OBF algorithm showed superior performance in the presence of specific noise levels and aligns well with the known information.
Figure 14 further validates the parameter estimation effectiveness of the LM-OBF method on actual measured data.
Figure 14a displays the processed raw anomalies,
Figure 14b shows the original anomaly energy
E after two-dimensional OBF processing,
Figure 14c presents the restored energy
E from the parameter estimation results, and
Figure 14d illustrates the residuals of the parameter estimation. The application of field data underscores that the LM-OBF method exhibits robust adaptability to actual noisy data and provides superior parameter estimation results compared to traditional methods.
It is worth noting that to accurately compare the precision of different methods, a more appropriate target would be a small point-like magnetic dipole. We are planning to perform an appropriate field test later on.
5. Discussion
Magnetic dipole source parameter estimation is critical in magnetic anomaly detection and identification. However, traditional methods for estimating magnetic source parameters do not achieve stable and accurate estimations under low SNR conditions, which significantly hampers the practical application of these methods. This study introduces a novel method for magnetic source parameter estimation based on the LM-OBF algorithm, which can accurately estimate the parameters of magnetic dipole sources under low SNR conditions (down to −10 dB), providing an innovative strategy for magnetic source parameter estimation in such scenarios.
Although the LM-OBF algorithm enhances the accuracy and stability of traditional methods in the presence of strong noise interference, it has certain limitations. First, the LM-OBF algorithm depends on the results of two-dimensional OBF decomposition. The OBF method exhibits weaker noise suppression capability for mixed noise of granular and Gaussian noise and for colored noise, which are almost inevitable in complex real-world measurement environments. This reduction undoubtedly decreases the parameter estimation accuracy of the LM-OBF algorithm. Therefore, in practical measurement environments, it is essential to avoid such noise sources as much as possible. Simultaneously, future research should focus on noise reduction techniques such as autoregressive techniques and Kalman filtering to further filter out or whiten the noise, enhancing the practical performance of the LM-OBF algorithm. The tests were conducted on a computer equipped with an Intel Xeon Bronze 3204 CPU @ 1.90 GHz and 128 GB RAM. For a 50 × 50 grid (2500 data points), the parameter inversion process required approximately 5.5 min to complete. The computation time increases significantly with larger datasets, and under high-noise conditions, the inversion algorithm may require extended iterations to adequately fit the observed data. To enhance computational efficiency, future work could explore GPU parallelization strategies or distributed computing frameworks to expand the applicability of the LM-OBF method in large-scale detection tasks.
The practical deployment of UAV-based magnetic inversion inherently involves trade-offs between theoretical precision and real-world operational constraints. A critical factor is the positioning accuracy of the Real-Time Kinematic (RTK) system, which provides centimeter-level horizontal precision (±1 cm + 1 ppm) and sub-decimeter vertical accuracy (±0.1 m under stable conditions). While this meets the requirements for most near-surface magnetic surveys, residual errors arising from UAV attitude fluctuations or transient signal loss can introduce minor but non-negligible offsets in sensor positioning. These deviations were mitigated through post-processing gridding.
Height-dependent anomalies further complicate inversion accuracy. Variations in UAV altitude—even within the RTK’s specified tolerance—alter the magnitude and spatial distribution of the target’s magnetic signature. For instance, a vertical drift of 10 cm at a flight height of 1 m can induce a ~5–10% change in anomaly amplitude for a shallow dipole source. To address this, our workflow assumes a constant elevation plane during gridding, effectively averaging altitude-related variations. However, this approximation becomes less reliable in highly undulating terrains or for deeply buried targets, where altitude errors disproportionately amplify depth estimation uncertainties.
In addition, the LM-OBF algorithm utilizes the traditional LM method, which encounters specific issues concerning iteration speed and global convergence properties. When processing small datasets, the LM-OBF algorithm can reach the optimal solution within a relatively short number of iterations and time. However, with the increase in data volume, such as in the case of large-area data or under dense sampling conditions, the LM-OBF algorithm faces prolonged iteration times. This limitation constrains the application of the LM-OBF algorithm to the post-processing and identification stages of data, making it unsuitable for real-time parameter estimation scenarios involving magnetic dipole sources.
In addition, the accuracy of magnetic anomaly data itself significantly influences the LM-OBF algorithm’s accuracy in estimating the parameters of magnetic dipole sources. For example, the data obtained during total field scalar measurements includes the superimposed anomalies of the geomagnetic background field and the target magnetic source. Accurately separating the target magnetic anomaly from the geomagnetic background anomaly, ensuring that the data contains only the magnetic anomalies generated by the target magnetic source, will profoundly affect parameter estimation accuracy under actual measurement conditions. This separation can lead to significant deviations between the actual and estimated values. Therefore, developing more accurate field separation strategies or investigating parameter estimation methods based on gradient and tensor data will hold greater practical significance in the future.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}