
Robotics in the Construction Industry: A Bibliometric Review of Recent Trends and Technological Evolution

 , ,
, ,  and
and
Abstract
1. Introduction
2. Data and Methods
2.1. Methodological Rationale
2.2. Data Sources
2.3. Data Screening and Preprocessing
2.4. Analytical Tools and Techniques
3. Analysis and Results
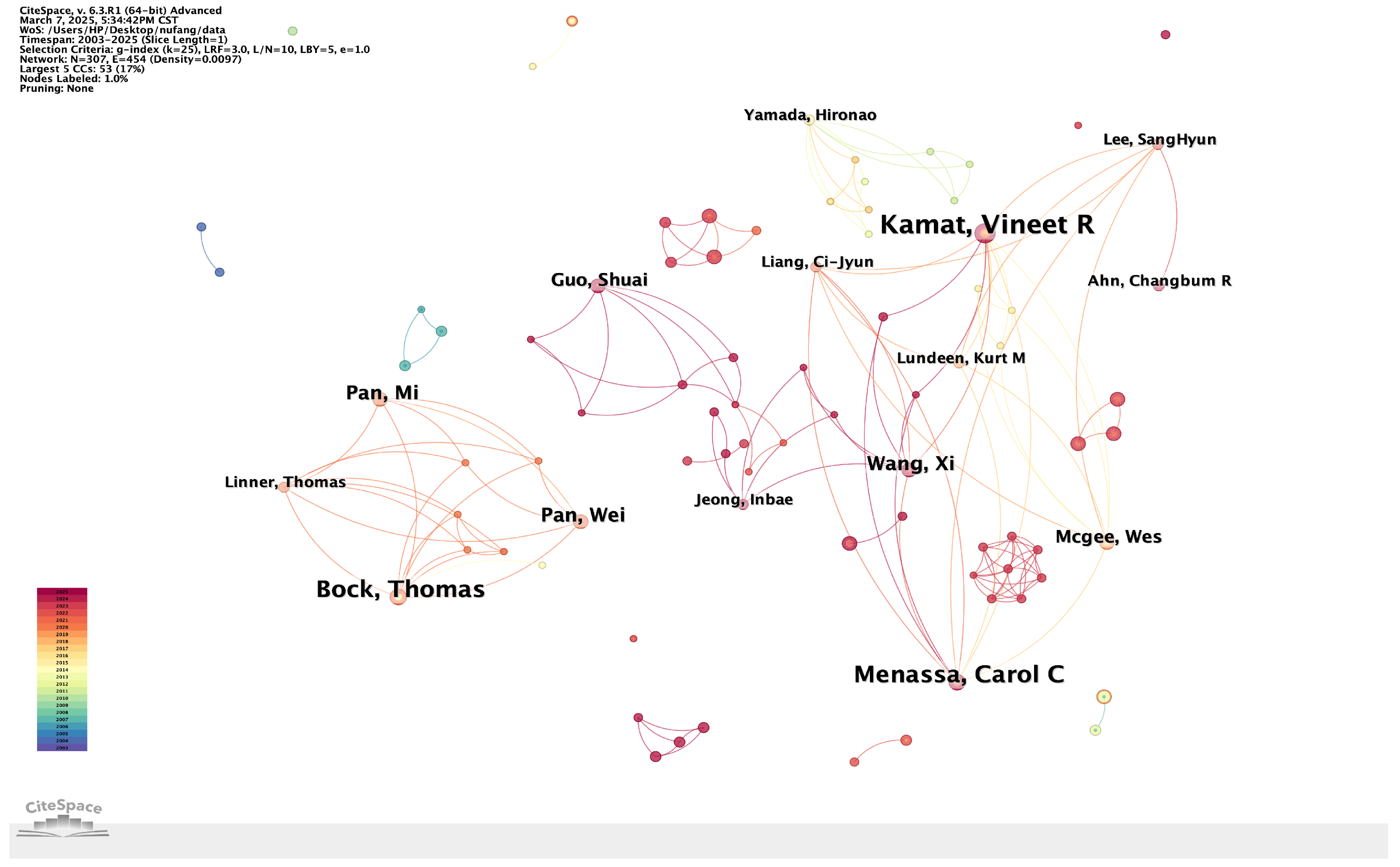
3.1. Visualization Analysis of Researchers
3.2. Visualization Analysis of Research Institutions
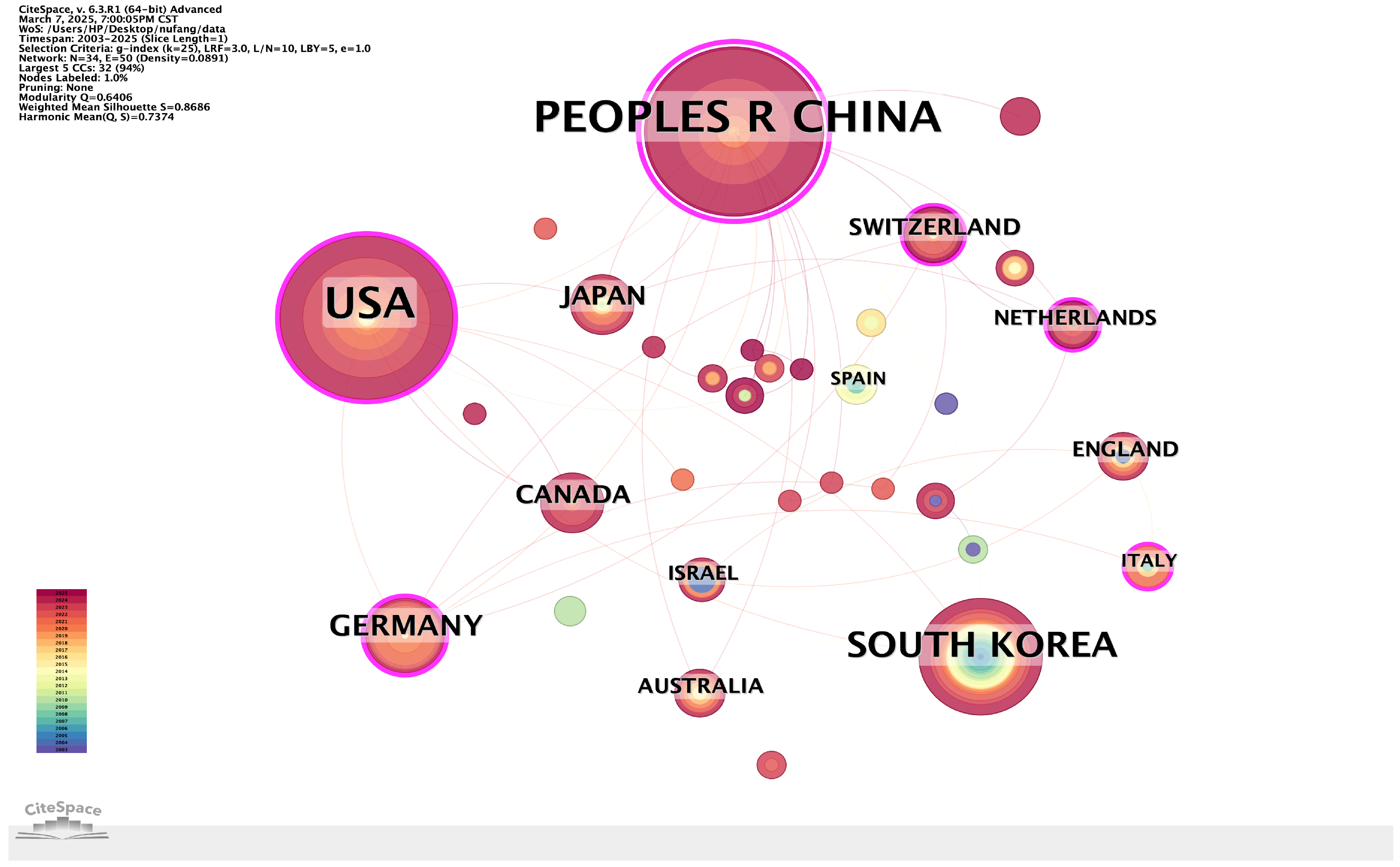
3.3. Visualization Analysis of Countries
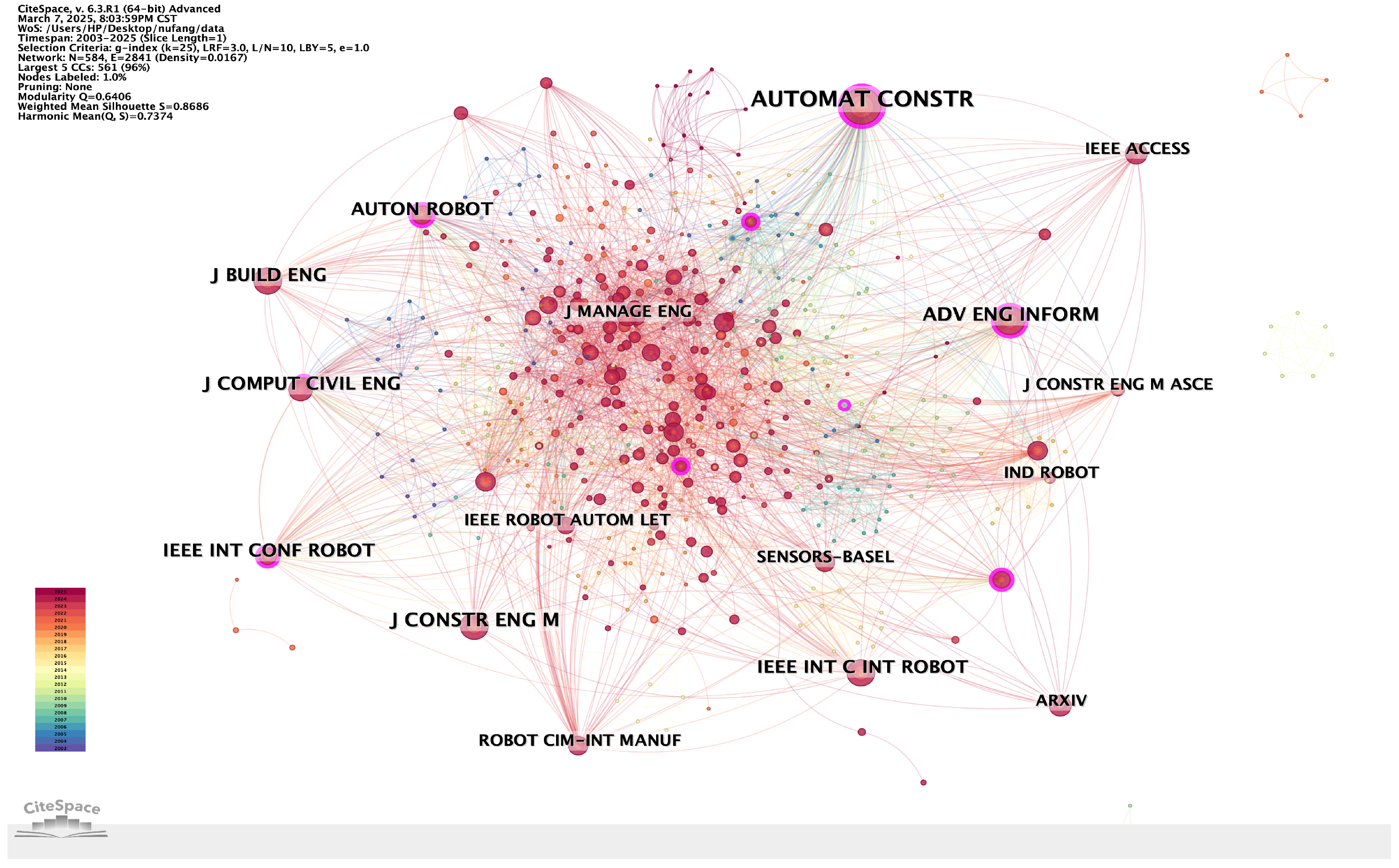
3.4. Visualization Analysis of Journal Distribution
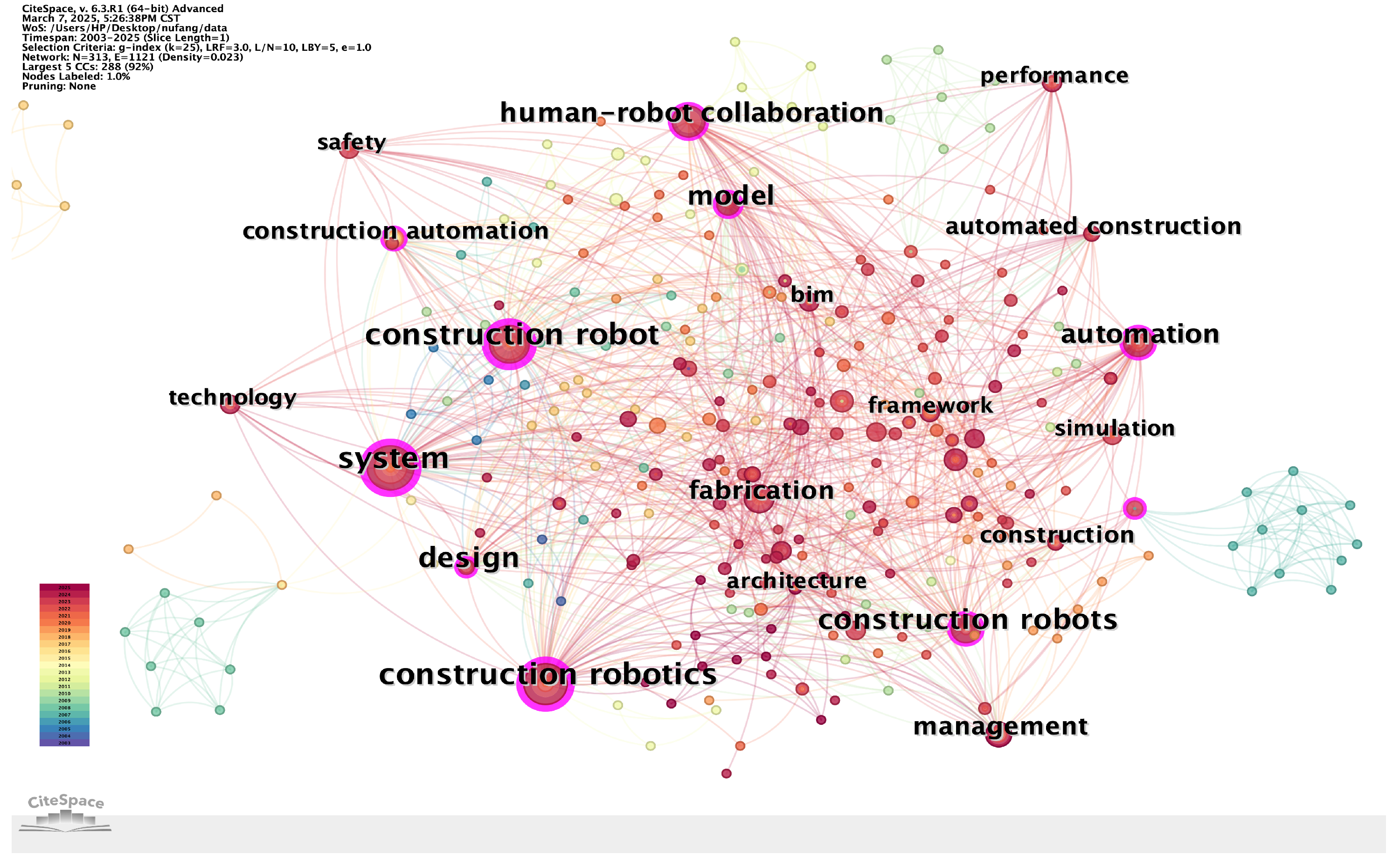
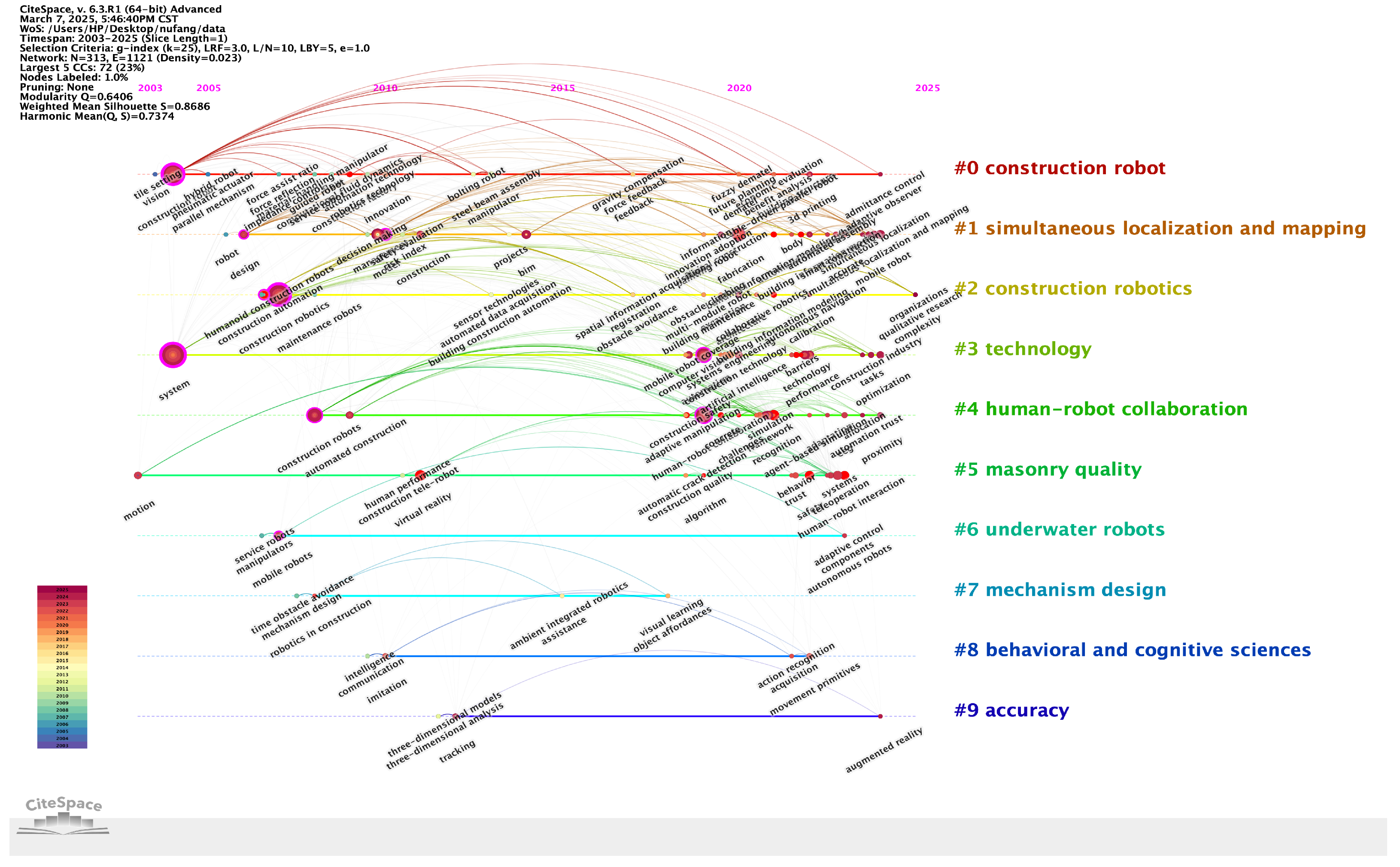
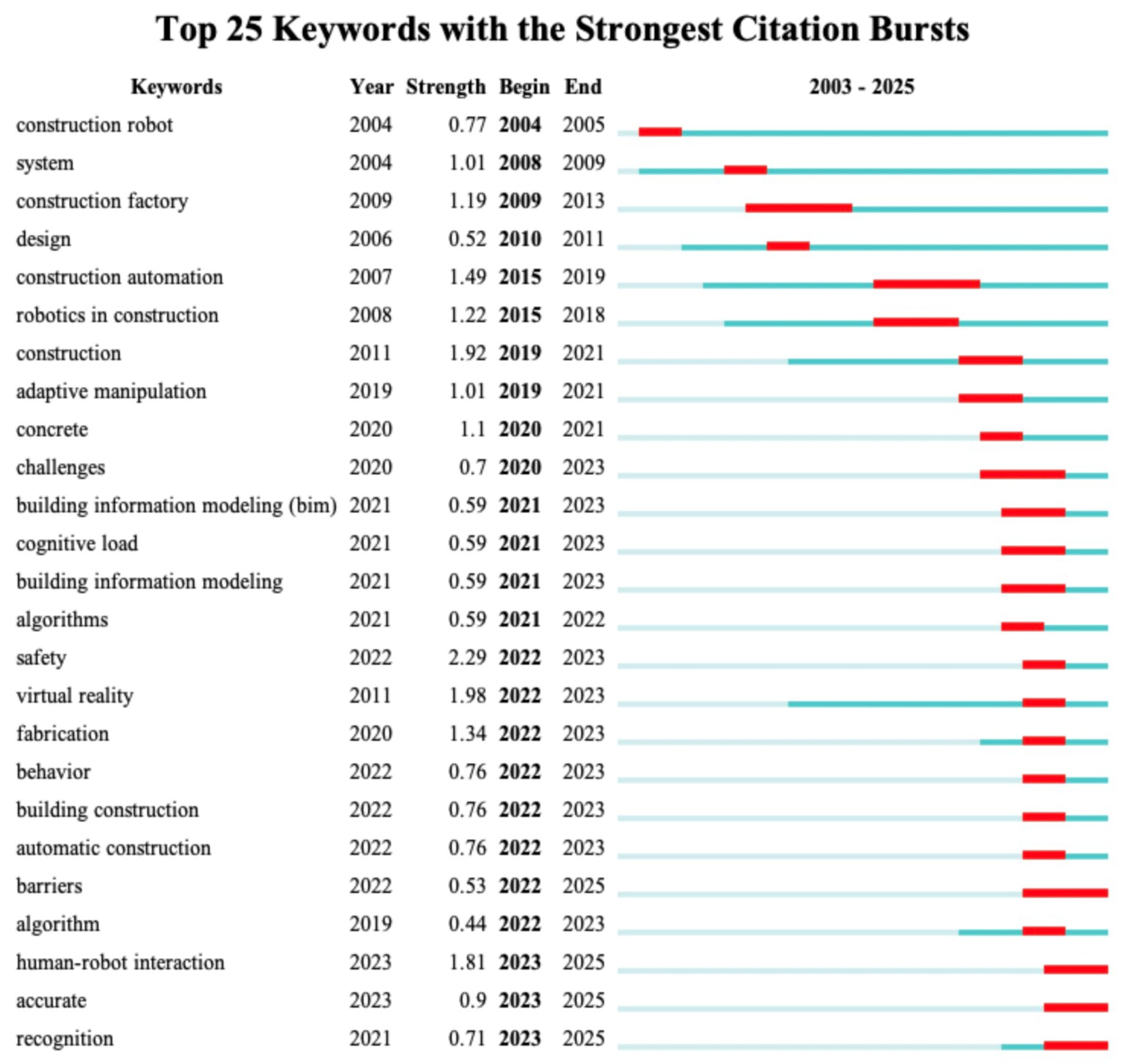
3.5. Visualization Analysis of Keywords
4. Discussion
4.1. History and Trends
- (1)
- Extreme environment applications: Deploying robots in underwater construction (e.g., building bridge foundations) or nuclear facility maintenance, leveraging advancements in sensor fusion and autonomous navigation.
- (2)
- Green construction integration: Aligning with sustainability goals, such as AI-guided material recycling robots for circular economy practices.
- (3)
- Global collaborative frameworks: Establishing cross-border consortia to standardize protocols (e.g., ISO certifications for swarm robotics) and sharing best practices.
- (4)
- Human-centric AI: Developing “cognitive load” mitigation systems to enhance human–robot collaboration in high-risk tasks like high-rise welding.
4.2. Beyond Bibliometrics: Translating Trends into Action
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Abioye, S.O.; Oyedele, L.O.; Akanbi, L.; Ajayi, A.; Delgado, J.M.D.; Bilal, M.; Akinade, O.O.; Ahmed, A. Artificial intelligence in the construction industry: A review of present status, opportunities and future challenges. J. Build. Eng. 2021, 44, 103299. [Google Scholar] [CrossRef]
- Sánchez-Garrido, A.J.; Navarro, I.J.; García, J.; Yepes, V. A systematic literature review on modern methods of construction in building: An integrated approach using machine learning. J. Build. Eng. 2023, 73, 106725. [Google Scholar] [CrossRef]
- Al Masri, A.; da Costa, B.B.F.; Vasco, D.; Boer, D.; Haddad, A.N.; Najjar, M.K. Roles of robotics in architectural and engineering construction industries: Review and future trends. J. Build. Des. Environ. 2024, 2, 28029. [Google Scholar]
- Chen, Y.; Huang, D.; Liu, Z.; Osmani, M.; Demian, P. Construction 4.0, Industry 4.0, and Building Information Modeling (BIM) for sustainable building development within the smart city. Sustainability 2022, 14, 10028. [Google Scholar] [CrossRef]
- Parascho, S. Construction robotics: From automation to collaboration. Annu. Rev. Control. Robot. Auton. Syst. 2023, 6, 183–204. [Google Scholar] [CrossRef]
- Chu, B.; Kim, D.; Hong, D. Robotic automation technologies in construction: A review. Int. J. Precis. Eng. Manuf. 2008, 9, 85–91. [Google Scholar]
- Ayoola, V.B.; Idoko, P.; Danquah, E.O.; Ukpoju, E.A.; Obasa, J.; Otakwu, A.; Enyejo, J.O. Optimizing Construction Management and Workflow Integration through Autonomous Robotics for Enhanced Productivity Safety and Precision on Modern Construction Sites. Int. J. Sci. Res. Mod. Technol. (IJSRMT) 2024, 3, 1–15. [Google Scholar] [CrossRef]
- Thaker, R.K. Robotics in Construction: A Critical Review of Reinforcement Learning, Imitation Learning, and Industry-Specific Challenges for Adoption. Int. J. Multidiscip. Res. 2024, 6, 1–7. [Google Scholar]
- Chea, C.P.; Bai, Y.; Pan, X.; Arashpour, M.; Xie, Y. An integrated review of automation and robotic technologies for structural prefabrication and construction. Transp. Saf. Environ. 2020, 2, 81–96. [Google Scholar] [CrossRef]
- Külz, J.; Terzer, M.; Magri, M.; Giusti, A.; Althoff, M. Holistic Construction Automation with Modular Robots: From High-Level Task Specification to Execution. arXiv 2024, arXiv:2412.20867. [Google Scholar]
- Zhu, A.; Dai, T.; Xu, G.; Pauwels, P.; De Vries, B.; Fang, M. Deep reinforcement learning for real-time assembly planning in robot-based prefabricated construction. IEEE Trans. Autom. Sci. Eng. 2023, 20, 1515–1526. [Google Scholar] [CrossRef]
- Gharbia, M.; Chang-Richards, A.; Zhong, R. Robotic technologies in concrete building construction: A systematic review. In Proceedings of the International Symposium on Automation and Robotics in Construction (ISARC), Banff, AB, Canada, 21–24 May 2019; Volume 36, pp. 10–19. [Google Scholar]
- Bogue, R. What are the prospects for robots in the construction industry? Ind. Robot. Int. J. 2018, 45, 1–6. [Google Scholar] [CrossRef]
- Leng, Y.; Shi, X.; Hiroatsu, F.; Kalachev, A.; Wan, D. Automated construction for human–robot interaction in wooden buildings: Integrated robotic construction and digital design of iSMART wooden arches. J. Field Robot. 2023, 40, 810–827. [Google Scholar] [CrossRef]
- Delgado, J.M.D.; Oyedele, L.; Ajayi, A.; Akanbi, L.; Akinade, O.; Bilal, M.; Owolabi, H. Robotics and automated systems in construction: Understanding industry-specific challenges for adoption. J. Build. Eng. 2019, 26, 100868. [Google Scholar] [CrossRef]
- Olofsson, T.; Emborg, M. Feasibility study of field force automation in the Swedish construction sector. Electron. J. Inf. Technol. Constr. 2004, 9, 297–311. [Google Scholar]
- Borrmann, A.; Bruckmann, T.; Dörfler, K.; Hartmann, T.; Smarsly, K. Towards realizing the information backbone of robotized construction–Computational methods and cyber-physical architectures for collaborative robotic fleets. In Proceedings of the CIB W78 Conference 2021, Luxembourg, 11–15 October 2021. [Google Scholar]
- Musarat, M.A.; Irfan, M.; Alaloul, W.S.; Maqsoom, A.; Ghufran, M. A review on the way forward in construction through industrial revolution 5.0. Sustainability 2023, 15, 13862. [Google Scholar] [CrossRef]
- Licardo, J.T.; Domjan, M.; Orehovački, T. Intelligent robotics—A systematic review of emerging technologies and trends. Electronics 2024, 13, 542. [Google Scholar] [CrossRef]
- Dhamak, P.; Aital, P.; Daftardar, A. A comprehensive overview of Construction 4.0 technologies and their implementation in the construction industry. J. Sci. Technol. Policy Manag. 2025. ahead-of-print. [Google Scholar]
- Liang, C.J.; Le, T.H.; Ham, Y.; Mantha, B.R.; Cheng, M.H.; Lin, J.J. Ethics of artificial intelligence and robotics in the architecture, engineering, and construction industry. Autom. Constr. 2024, 162, 105369. [Google Scholar] [CrossRef]
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. The PRISMA 2020 statement: An updated guideline for reporting systematic reviews. BMJ 2021, 372, n71. [Google Scholar] [CrossRef]
- Geng, Y.; Zhang, X.; Gao, J.; Yan, Y.; Chen, L. Bibliometric analysis of sustainable tourism using CiteSpace. Technol. Forecast. Soc. Change 2024, 202, 123310. [Google Scholar] [CrossRef]
- Dermeval, D.; Paiva, R.; Bittencourt, I.I.; Vassileva, J.; Borges, D. Authoring tools for designing intelligent tutoring systems: A systematic review of the literature. Int. J. Artif. Intell. Educ. 2018, 28, 336–384. [Google Scholar] [CrossRef]
- Costa, G.d.M.; Petry, M.R.; Moreira, A.P. Augmented reality for human–robot collaboration and cooperation in industrial applications: A systematic literature review. Sensors 2022, 22, 2725. [Google Scholar] [CrossRef] [PubMed]
- Markscheffel, B.; Schröter, F. Comparison of two science mapping tools based on software technical evaluation and bibliometric case studies. Collnet J. Sci. Inf. Manag. 2021, 15, 365–396. [Google Scholar] [CrossRef]
- Li, E.Y.; Liao, C.H.; Yen, H.R. Co-authorship networks and research impact: A social capital perspective. Res. Policy 2013, 42, 1515–1530. [Google Scholar] [CrossRef]
- Bock, T. The future of construction automation: Technological disruption and the upcoming ubiquity of robotics. Autom. Constr. 2015, 59, 113–121. [Google Scholar] [CrossRef]
- Scassellati, B. Theory of mind for a humanoid robot. Auton. Robot. 2002, 12, 13–24. [Google Scholar] [CrossRef]
- Pan, Y.; Zhang, L. Integrating BIM and AI for smart construction management: Current status and future directions. Arch. Comput. Methods Eng. 2023, 30, 1081–1110. [Google Scholar] [CrossRef]
- Skubis, I.; Wolniak, R.; Grebski, W.W. AI and Human-Centric Approach in Smart Cities Management: Case Studies from Silesian and Lesser Poland Voivodships. Sustainability 2024, 16, 8279. [Google Scholar] [CrossRef]
- Scherngell, T.; Schwegmann, K.; Zahradnik, G. The geographical dynamics of global R&D collaboration networks in robotics: Evidence from co-patenting activities across urban areas worldwide. PLoS ONE 2023, 18, e0281353. [Google Scholar]
- Regona, M.; Yigitcanlar, T.; Hon, C.; Teo, M. Artificial intelligence and sustainable development goals: Systematic literature review of the construction industry. Sustain. Cities Soc. 2024, 108, 105499. [Google Scholar] [CrossRef]
- Yan, J.K.; Zheng, Z.; Zhou, Y.C.; Lin, J.R.; Deng, Y.C.; Lu, X.Z. Recent research progress in intelligent construction: A comparison between china and developed countries. Buildings 2023, 13, 1329. [Google Scholar] [CrossRef]
- Zhao, S.; Wang, Q.; Fang, X.; Liang, W.; Cao, Y.; Zhao, C.; Li, L.; Liu, C.; Wang, K. Application and development of autonomous robots in concrete construction: Challenges and opportunities. Drones 2022, 6, 424. [Google Scholar] [CrossRef]
- Debrah, C.; Chan, A.P.; Darko, A. Artificial intelligence in green building. Autom. Constr. 2022, 137, 104192. [Google Scholar] [CrossRef]
- Fu, S.; Yang, D.; Mei, Z.; Zheng, W. Progress in Construction Robot Path-Planning Algorithms. Appl. Sci. 2025, 15, 1165. [Google Scholar] [CrossRef]
- Asif, M.; Naeem, G.; Khalid, M. Digitalization for sustainable buildings: Technologies, applications, potential, and challenges. J. Clean. Prod. 2024, 450, 141814. [Google Scholar] [CrossRef]
- Wei, Y.; Yuan, H.; Li, H. Exploring the Contribution of Advanced Systems in Smart City Development for the Regeneration of Urban Industrial Heritage. Buildings 2024, 14, 583. [Google Scholar] [CrossRef]
- Zhang, M.; Xu, R.; Wu, H.; Pan, J.; Luo, X. Human–robot collaboration for on-site construction. Autom. Constr. 2023, 150, 104812. [Google Scholar] [CrossRef]
- Xiao, B.; Chen, C.; Yin, X. Recent advancements of robotics in construction. Autom. Constr. 2022, 144, 104591. [Google Scholar] [CrossRef]
- Shao, Z.; Zhao, R.; Yuan, S.; Ding, M.; Wang, Y. Tracing the evolution of AI in the past decade and forecasting the emerging trends. Expert Syst. Appl. 2022, 209, 118221. [Google Scholar] [CrossRef]
- Hilmi, A.H.; Hamid, A.R.A.; Ibrahim, W.A.R.A.W. Advancements in Cognitive Ergonomics: Integration with Human-Robot Collaboration, Workload Management, and Industrial Applications. Malays. J. Ergon. (MJEr) 2024, 6, 39–51. [Google Scholar] [CrossRef]
- Kakolu, S.; Faheem, M.A. Autonomous Robotics in Field Operations: A Data-Driven Approach to Optimize Performance and Safety. Iconic Res. Eng. J. 2023, 7, 565–578. [Google Scholar]
- Marinelli, M. From industry 4.0 to construction 5.0: Exploring the path towards human–robot collaboration in construction. Systems 2023, 11, 152. [Google Scholar] [CrossRef]
- Mazzetto, S. Interdisciplinary perspectives on agent-based modeling in the architecture, engineering, and construction industry: A comprehensive review. Buildings 2024, 14, 3480. [Google Scholar] [CrossRef]
- Winkle, K.; Lagerstedt, E.; Torre, I.; Offenwanger, A. 15 years of (who) man robot interaction: Reviewing the h in human-robot interaction. ACM Trans.-Hum.-Robot. Interact. 2023, 12, 1–28. [Google Scholar] [CrossRef]
- El-Agamy, R.F.; Sayed, H.A.; AL Akhatatneh, A.M.; Aljohani, M.; Elhosseini, M. Comprehensive analysis of digital twins in smart cities: A 4200-paper bibliometric study. Artif. Intell. Rev. 2024, 57, 154. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Name | Institution | Publication Volume |
|---|---|---|---|
| 1 | Kamat, Vineet R. | University of Michigan | 18 |
| 2 | Bock, Thomas | Technical University of Munich | 8 |
| 3 | Menassa, Carol C. | University of Michigan | 8 |
| 4 | Wang, Xi | Texas A & M University System | 5 |
| 4 | Pan, Mi | University of Macau | 5 |
| 4 | Liu, Yizhi | Hunan University of Science & Technology | 5 |
| 4 | Pan, Wei | University of Hong Kong | 5 |
| 4 | Jebelli, Houtan | University of Illinois Urbana–Champaign | 5 |
| No. | Author | Year | Journal | Title | Citation |
|---|---|---|---|---|---|
| 1 | Bock, T. | 2015 | Automation in Construction | “The future of construction automation: Technological disruption and the upcoming ubiquity of robotics” | 265 |
| 2 | Scassellati, B. | 2022 | Autonomous Robots | “Theory of mind for a humanoid robot” | 200 |
| 3 | Goh, M. and Goh, Y.M. | 2019 | Automation in Construction | “Lean production theory-based simulation of modular construction processes” | 135 |
| 4 | Beane, M. | 2019 | Administrative Science Quarterly | “Shadow Learning: Building Robotic Surgical Skill When Approved Means Fail” | 134 |
| 5 | Wang, Z.L., Li, H., and Zhang, X.L. | 2019 | Automation in Construction | “Construction waste recycling robot for nails and screws: Computer vision technology and neural network approach” | 130 |
| 6 | Robertson, J. | 2010 | Body & Society | “Gendering Humanoid Robots: Robo-Sexism in Japan” | 122 |
| 7 | Sacks, R., Girolami, M., and Brilakis, I. | 2020 | Developments in the Built Environment | “Building Information Modelling, Artificial Intelligence and Construction Tech” | 118 |
| 8 | Billard, A., Robins, B., (…), Dautenhahn, K. | 2007 | Assistive Technology | “Building Robota, a mini-humanoid robot for the rehabilitation of children with autism” | 115 |
| 9 | Adami, P., Rodrigues, P.B., (…), Lucas, G. | 2021 | Advanced Engineering Informatics | “Effectiveness of VR-based training on improving construction workers’ knowledge, skills, and safety behavior in robotic teleoperation” | 105 |
| 10 | Liu, Y.Z., Habibnezhad, M., and Jebelli, H. | 2021 | Automation in Construction | “Brainwave-driven human–robot collaboration in construction” | 93 |
| No. | Institution | Publication Volume | No. | Institution | Publication Volume |
|---|---|---|---|---|---|
| 1 | University of Michigan | 15 | 6 | Swiss Federal Institutes of Technology Domain | 7 |
| 2 | University of Michigan System | 15 | 7 | Pennsylvania State University | 6 |
| 3 | University of Hong Kong | 10 | 7 | Hong Kong Polytechnic University | 6 |
| 4 | Hanyang University | 8 | 7 | ETH Zurich | 6 |
| 5 | Technical University of Munich | 7 | 7 | Pennsylvania Commonwealth System of Higher Education (PCSHE) | 6 |
| No. | Country | Publication Volume | No. | Country | Publication Volume |
|---|---|---|---|---|---|
| 1 | People’s Republic of China | 67 | 6 | Canada | 9 |
| 2 | USA | 65 | 7 | Switzerland | 7 |
| 3 | South Korea | 29 | 8 | England | 6 |
| 4 | Germany | 15 | 8 | Australia | 6 |
| 5 | Japan | 10 | 8 | The Netherlands | 6 |
| No. | Journal | Publication Volume | No. | Journal | Publication Volume |
|---|---|---|---|---|---|
| 1 | AUTOMAT CONSTR | 160 | 6 | J COMPUT CIVIL ENG | 62 |
| 2 | ADV ENG INFORM | 75 | 7 | J BUILD ENG | 61 |
| 3 | J CONSTR ENG M | 72 | 8 | AUTON ROBOT | 59 |
| 4 | IEEE INT CONF ROBOT | 65 | 9 | ROBOT CIM-INT MANUF | 42 |
| 5 | IEEE INT C INT ROBOT | 64 | 10 | J MANAGE ENG | 39 |
| No. | Keyword | Count | Centrality |
|---|---|---|---|
| 1 | construction robot | 34 | 0.38 |
| 2 | construction robotics | 33 | 0.27 |
| 3 | system | 31 | 0.27 |
| 4 | construction robots | 21 | 0.19 |
| 5 | poverty | 17 | 0.17 |
| 5 | design | 17 | 0.14 |
| 7 | automation | 16 | 0.12 |
| 8 | human–robot collaboration | 13 | 0.12 |
| 9 | model | 12 | 0.08 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, L.; Zhang, Y.; Liu, M.; Li, Y.; Li, Y.; Yu, Y.; Tang, Q.; Weng, S.; Sang, K.; Lin, G. Robotics in the Construction Industry: A Bibliometric Review of Recent Trends and Technological Evolution. Appl. Sci. 2025, 15, 6277. https://doi.org/10.3390/app15116277
Xu L, Zhang Y, Liu M, Li Y, Li Y, Yu Y, Tang Q, Weng S, Sang K, Lin G. Robotics in the Construction Industry: A Bibliometric Review of Recent Trends and Technological Evolution. Applied Sciences. 2025; 15(11):6277. https://doi.org/10.3390/app15116277
Chicago/Turabian StyleXu, Lu, Yulin Zhang, Mengjiao Liu, Yanhong Li, Yihang Li, Yaqing Yu, Qi Tang, Shaobin Weng, Kun Sang, and Guiye Lin. 2025. "Robotics in the Construction Industry: A Bibliometric Review of Recent Trends and Technological Evolution" Applied Sciences 15, no. 11: 6277. https://doi.org/10.3390/app15116277
APA StyleXu, L., Zhang, Y., Liu, M., Li, Y., Li, Y., Yu, Y., Tang, Q., Weng, S., Sang, K., & Lin, G. (2025). Robotics in the Construction Industry: A Bibliometric Review of Recent Trends and Technological Evolution. Applied Sciences, 15(11), 6277. https://doi.org/10.3390/app15116277