
System-Level Optimization in Switched Reluctance Machine Design—Current Trends, Methodologies, and Future Directions



Abstract
1. Introduction
2. System-Level Design Optimization
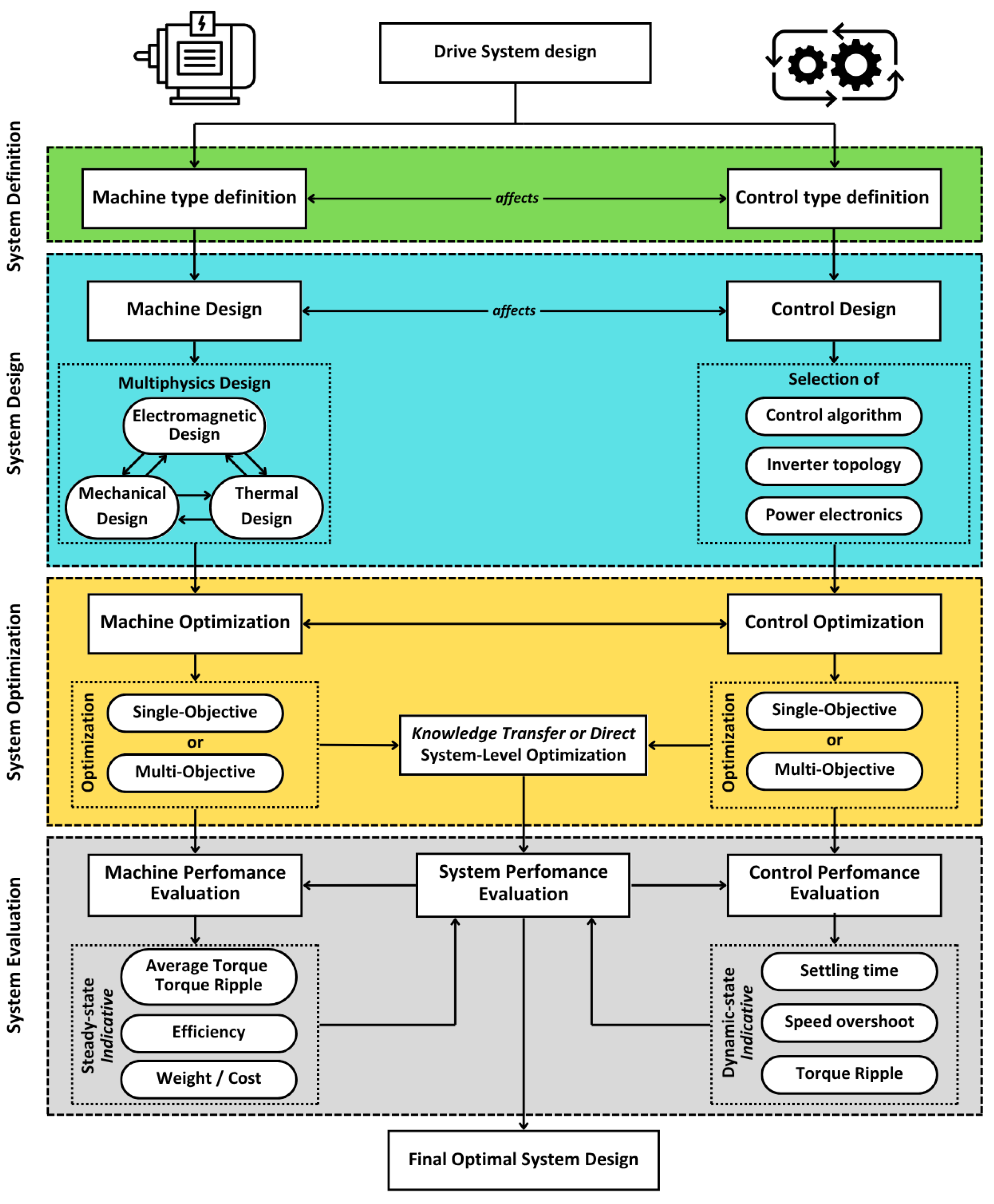
2.1. Methodology and Framework
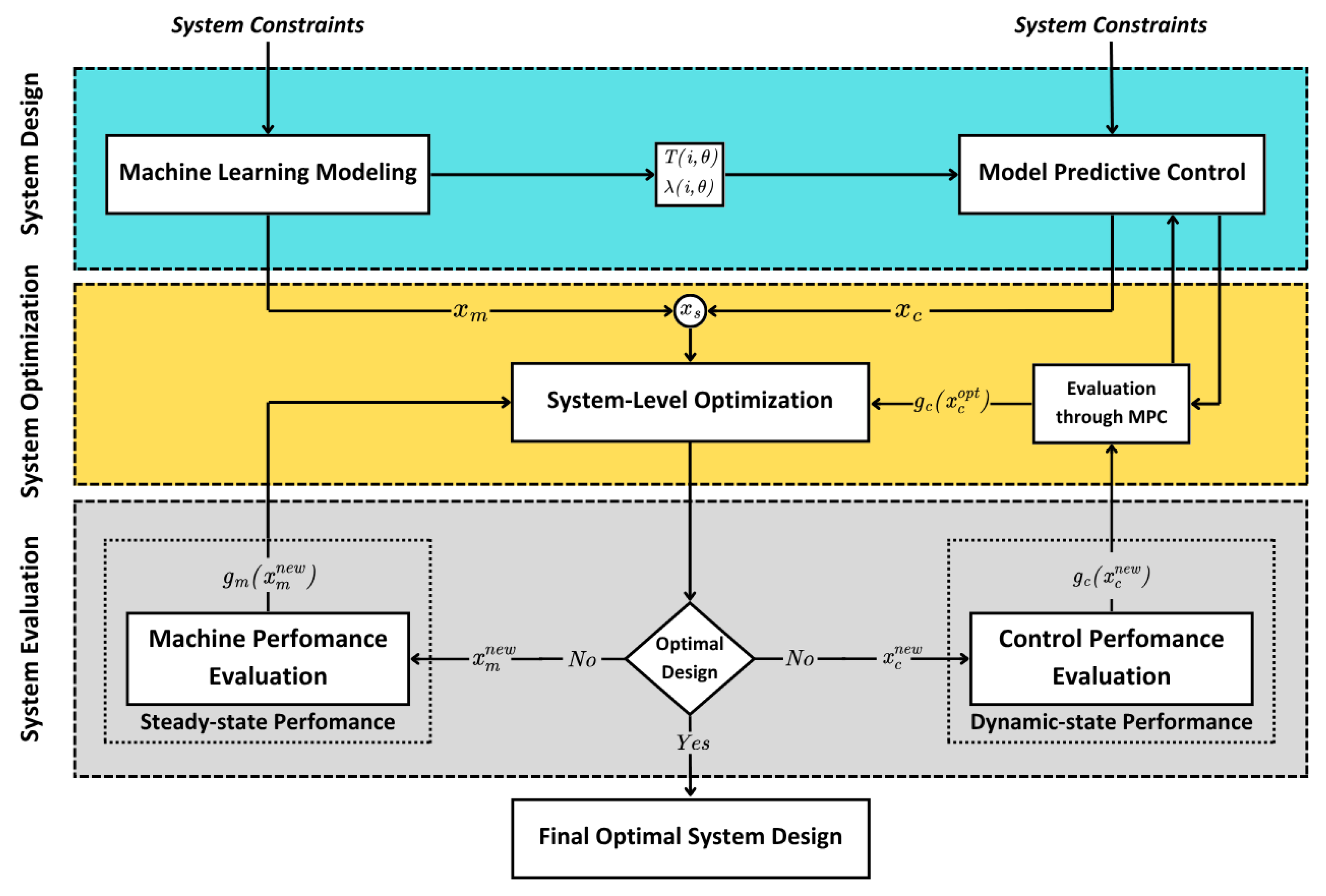
- In the steady state, the evaluation focuses on the machine’s performance, including the efficiency, weight, average torque, and cost.
- In the dynamic state, the evaluation examines the performance of the controller and the overall drive system, considering factors, such as speed overshoot, settling time, torque ripple, and system cost.
2.2. System-Level Optimization Methods
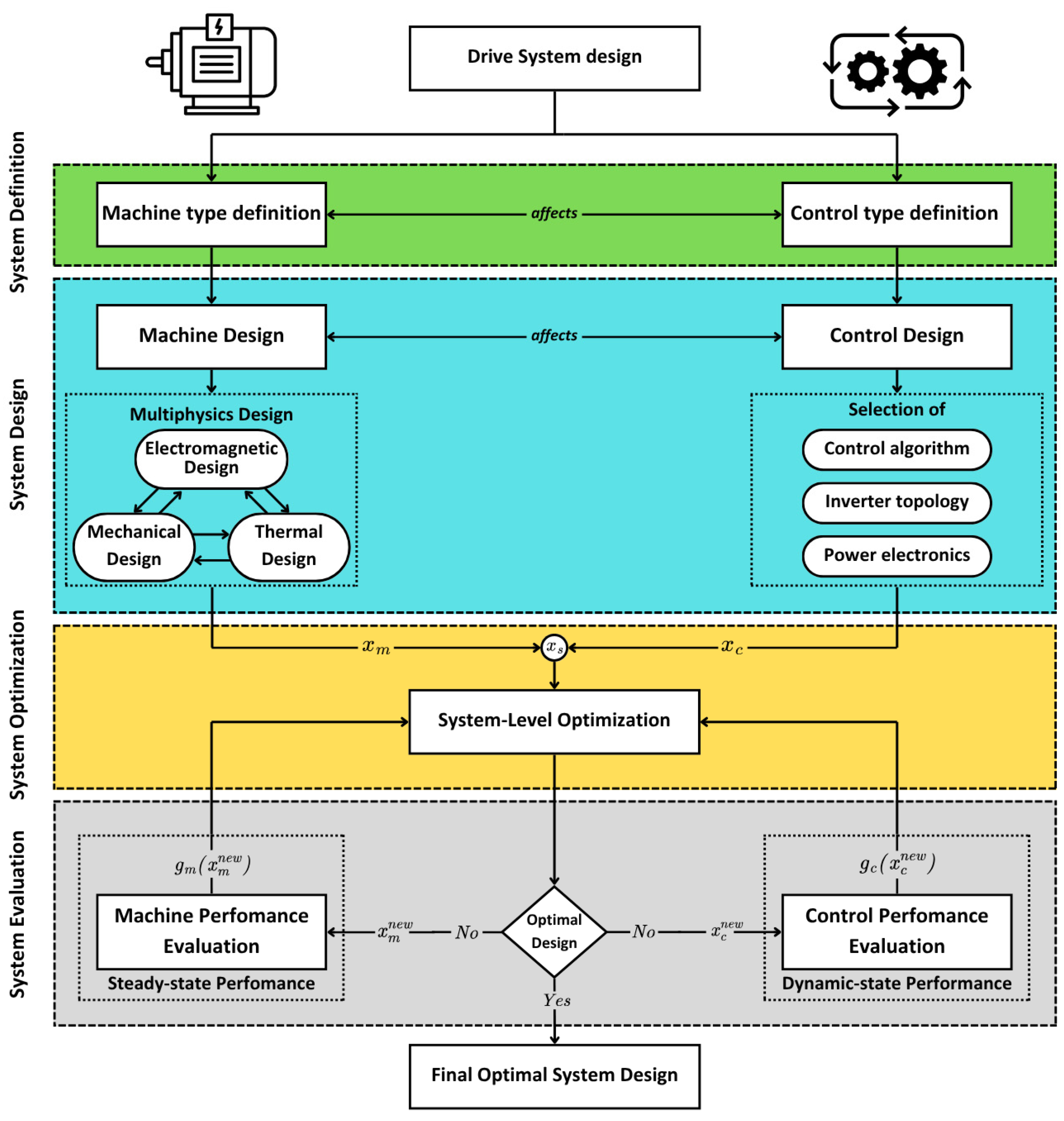
2.2.1. Single-Level Optimization Method
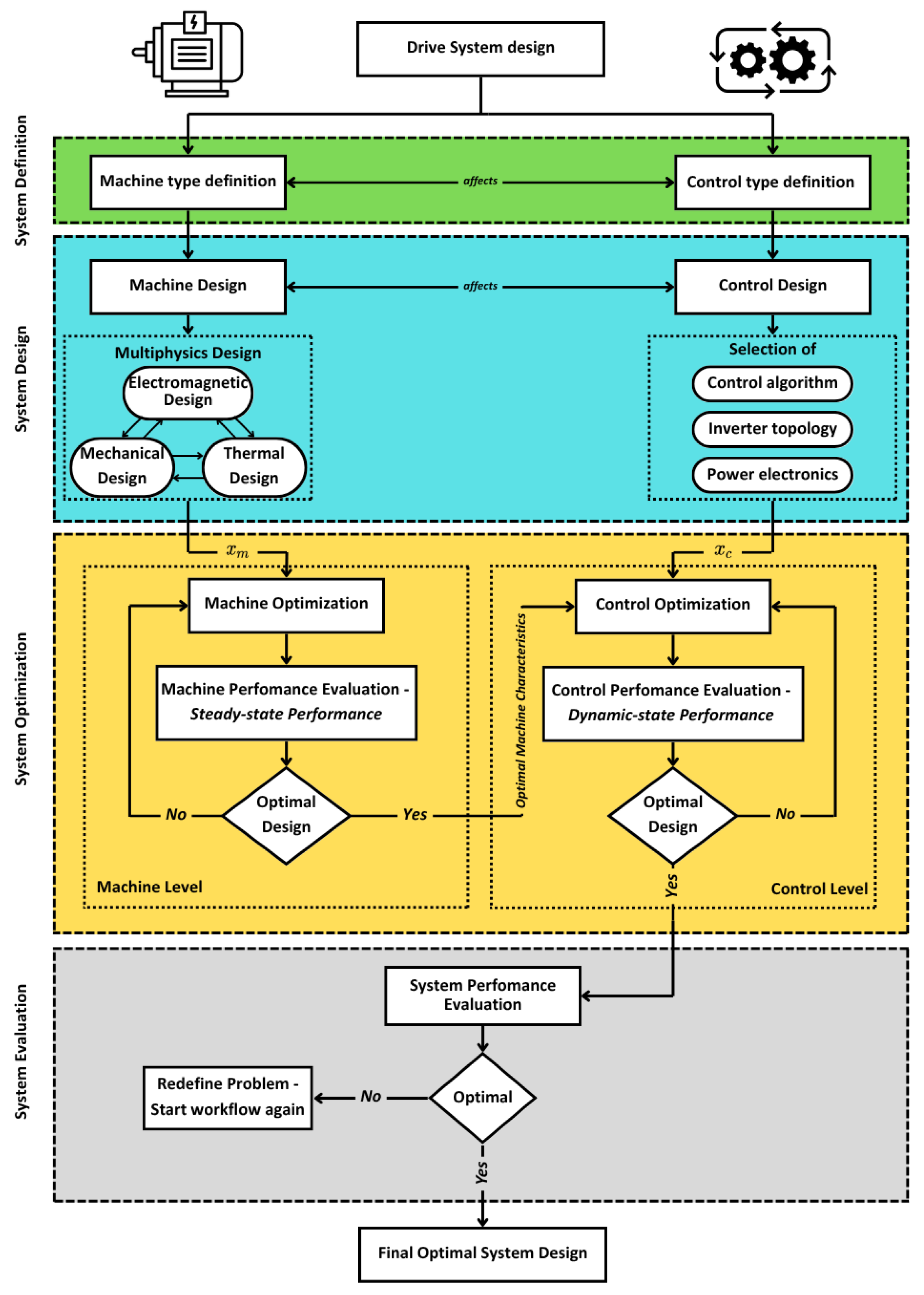
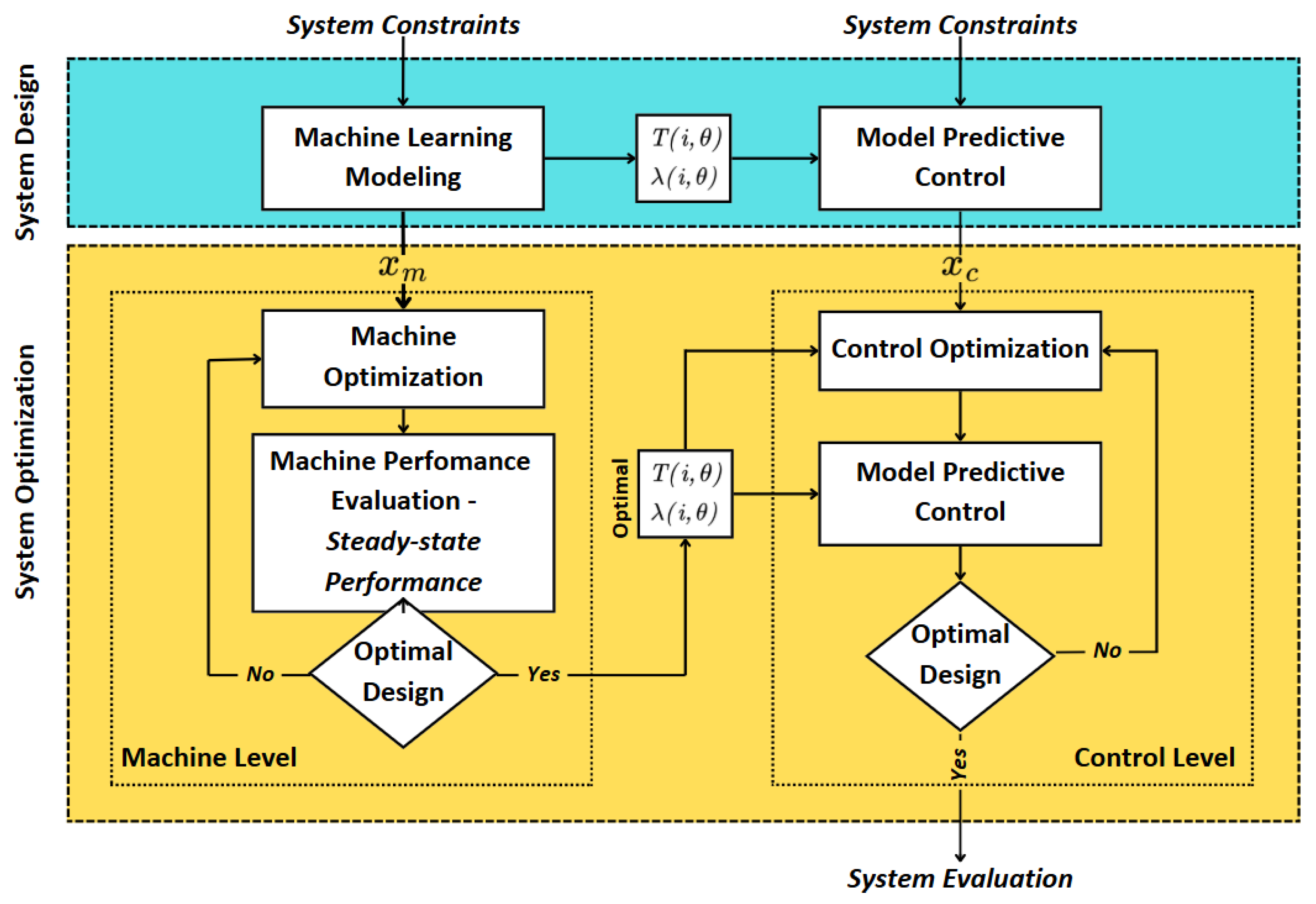
2.2.2. Multi-Level Optimization Method
- Machine Level: Design optimization is carried out for the machine, and the steady-state performance of the machine is evaluated, including efficiency, weight, average torque, and cost. Key machine parameters, such as resistance, flux linkage, and inductance, are then passed on to the next step to be used as inputs at the control level.
- Control Level: At this level, the optimization of the controller is performed based on the output parameters from the previous level. The dynamic performance of the drive system is then evaluated, focusing on speed overshoot, settling time, and torque ripple.
3. Model Complexity and Space Reduction Techniques for System-Level Optimization
3.1. Surrogate Modeling
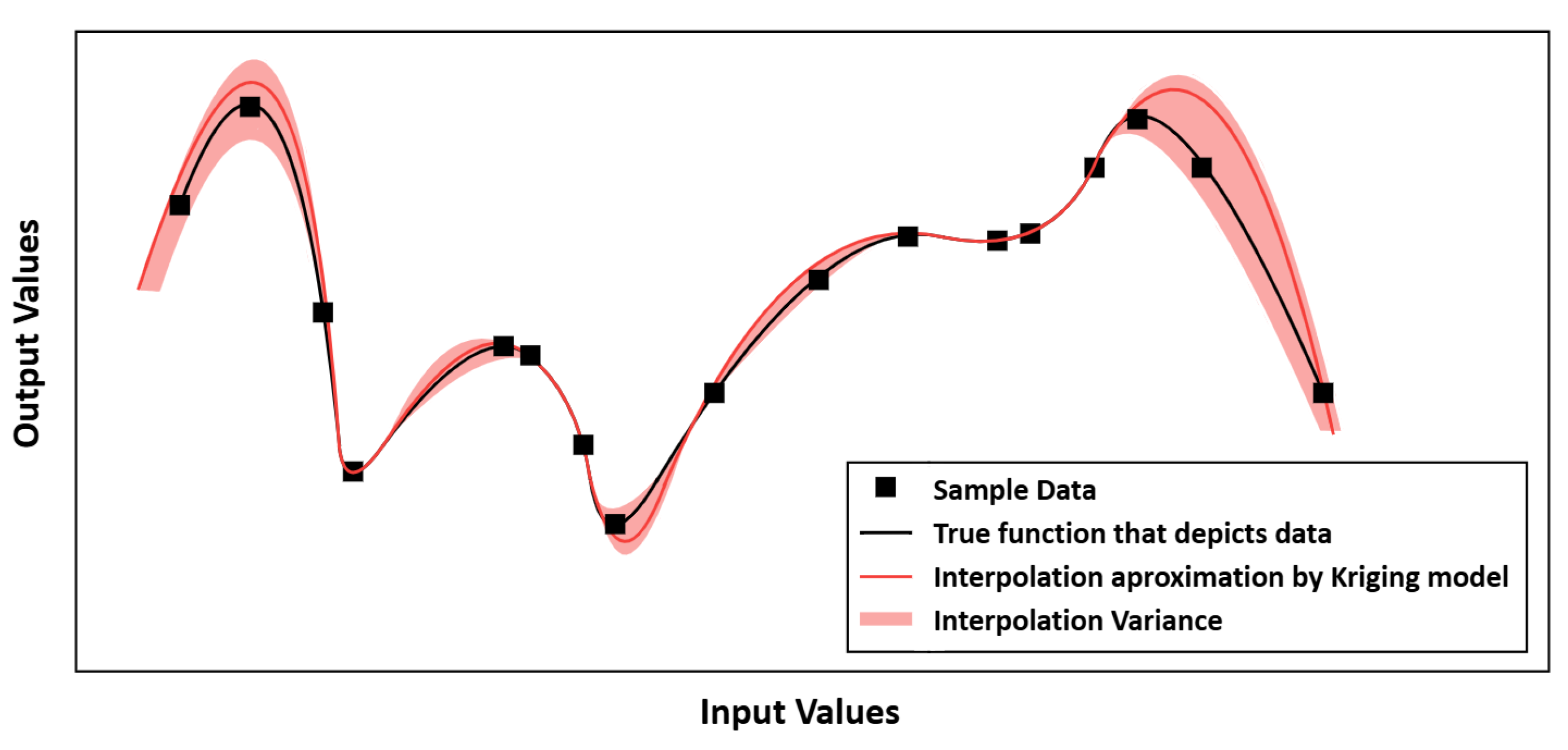
3.1.1. Kriging Model
3.1.2. Response Surface Method
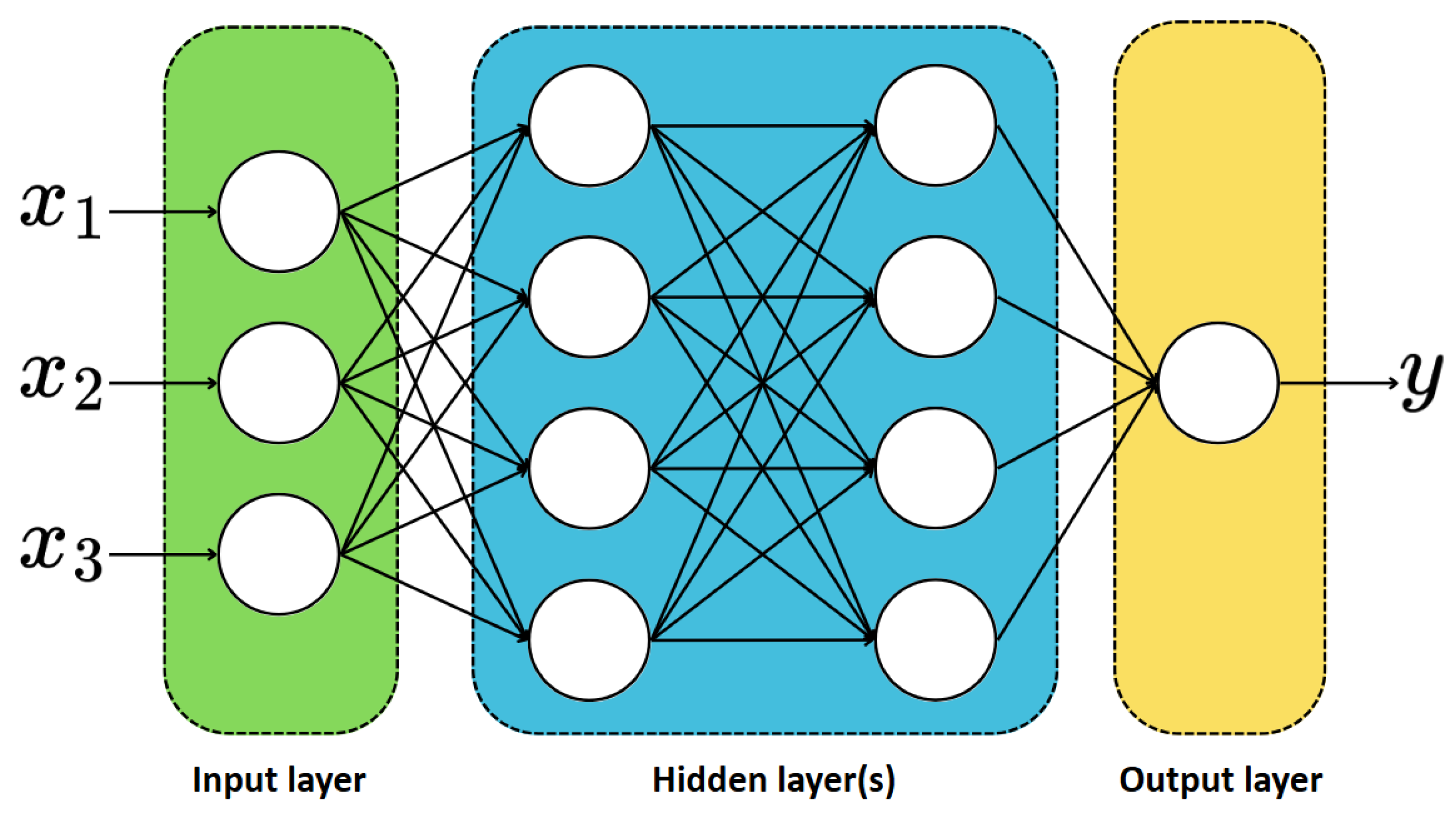
3.1.3. Artificial Neural Networks
3.2. Parameter Criticality Assessment
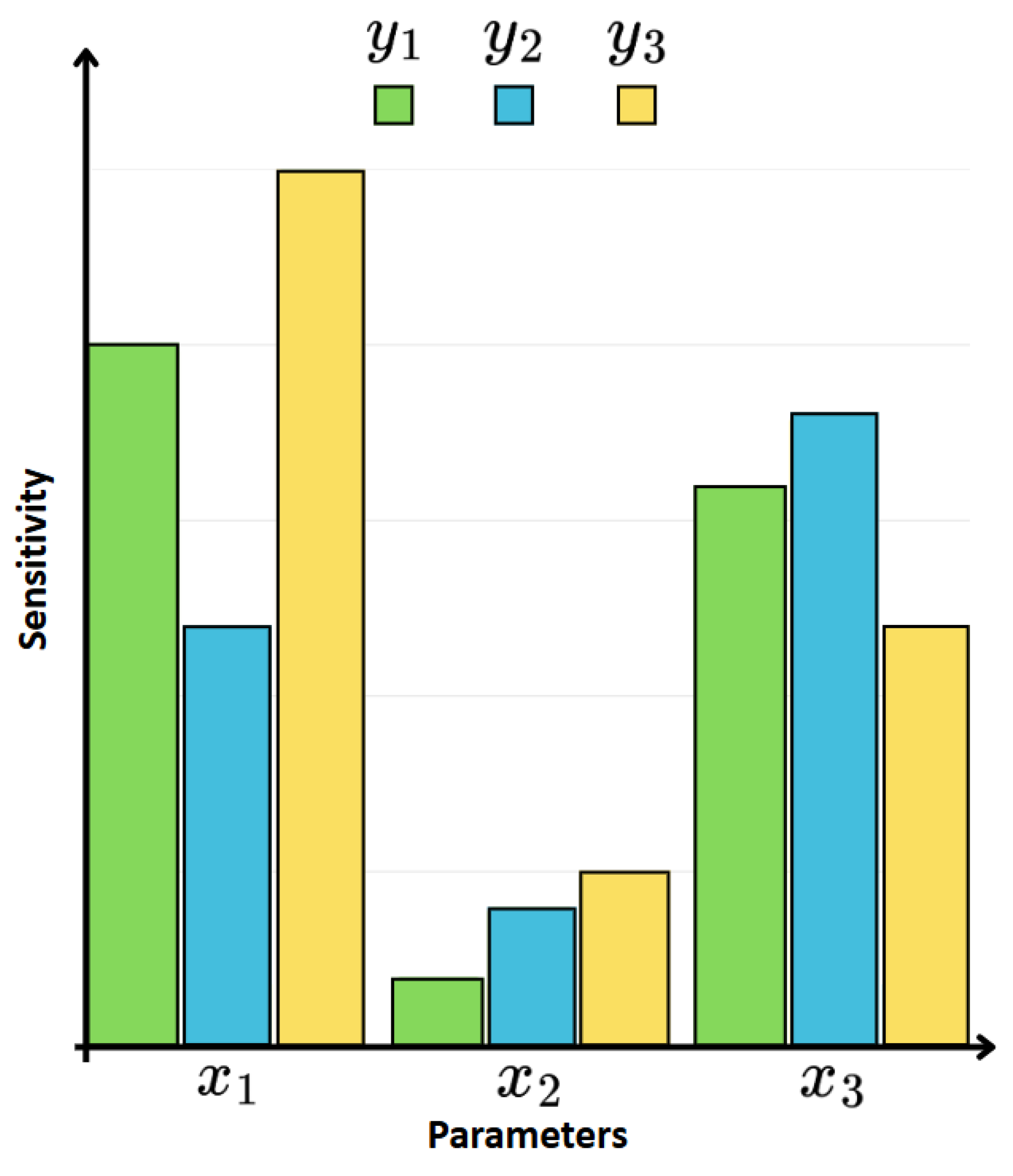
3.2.1. Sensitivity Analysis
3.2.2. Design of Experiments
3.3. Sequential Subspace Optimization Method
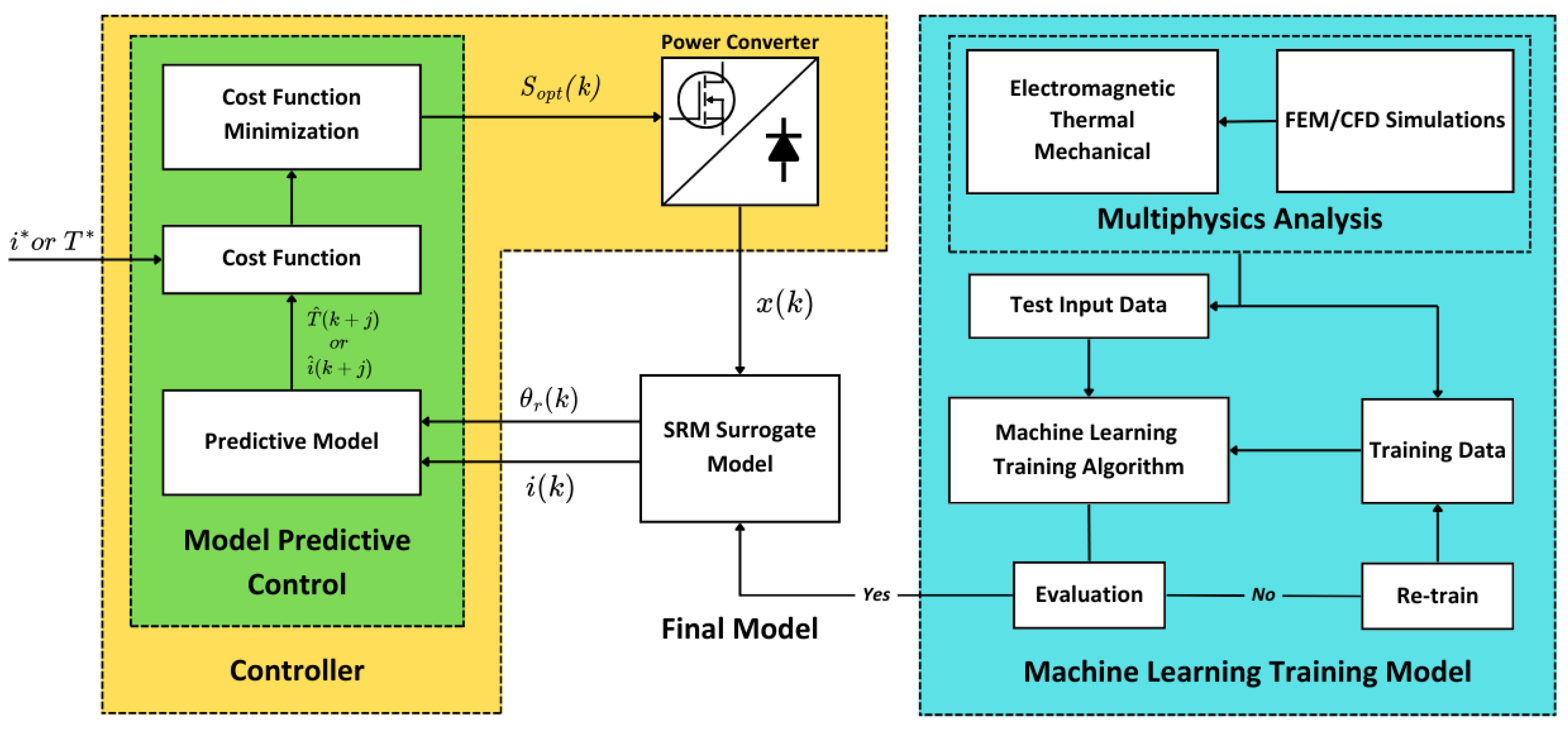
4. Proposed Solution–Machine Learning Modeling Coupled with Model Predictive Control
5. Future Directions in Research
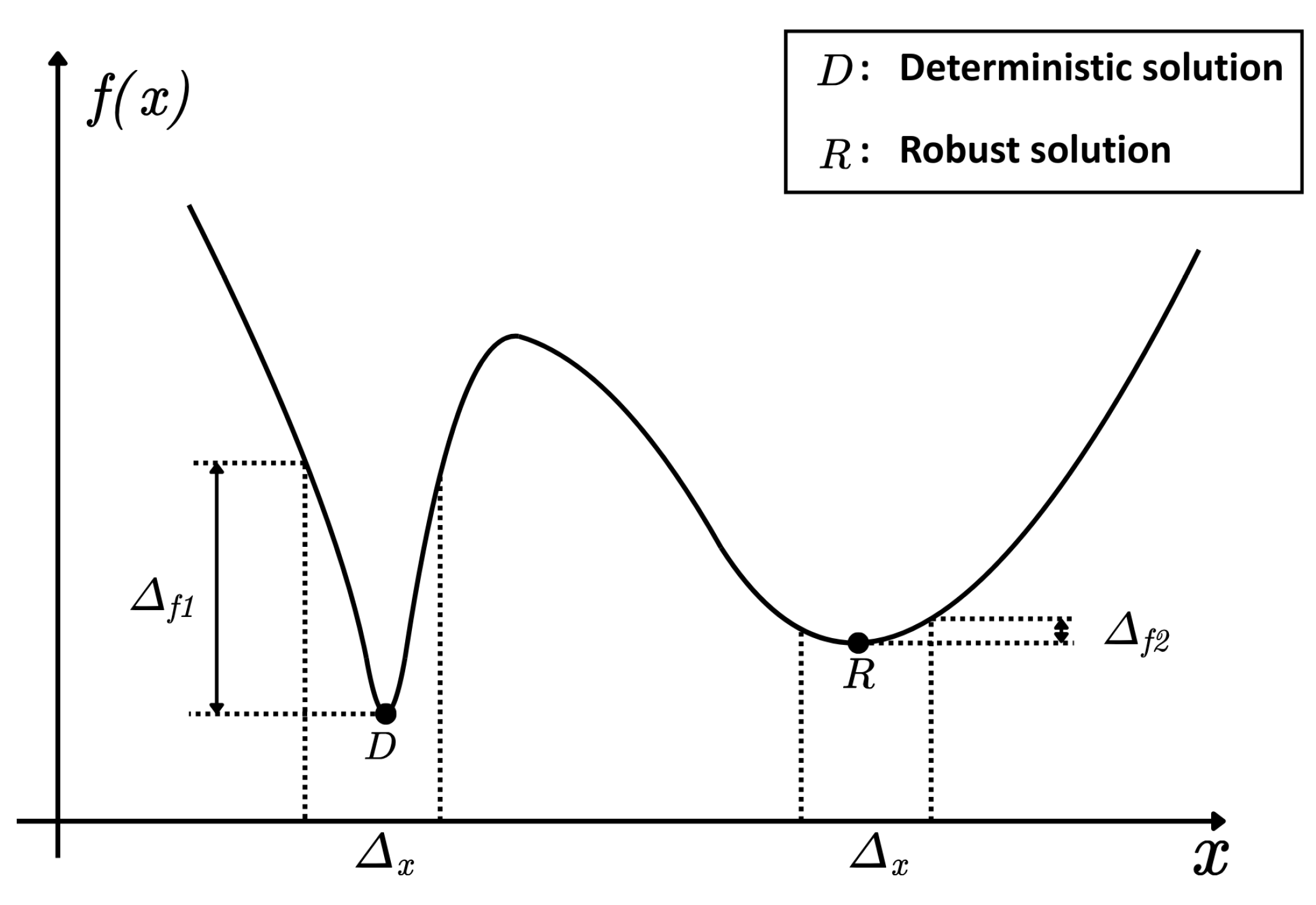
5.1. Integration of Robustness in System-Level Design Optimization
5.2. Noise and Vibration Improvement Through System-Level Design Optimization
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zabihi, N.; Gouws, R. A Review on Switched Reluctance Machines for Electric Vehicles. In Proceedings of the 2016 IEEE 25th International Symposium on Industrial Electronics (ISIE) 2016, Santa Clara, CA, USA, 8–10 June 2016. [Google Scholar] [CrossRef]
- Abdalmagid, M.; Sayed, E.; Bakr, M.H.; Emadi, A. Geometry and Topology Optimization of Switched Reluctance Machines: A Review. IEEE Access 2022, 10, 5141–5170. [Google Scholar] [CrossRef]
- Krishnan, R. Switched Reluctance Motor Drives: Modeling, Simulation, Analysis, Design, and Applications; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Vijay Babu, K.; Narasimharaju, B.L.; Vinod Kumar, D.M. Switched Reluctance Machine for Off-Grid Rural Applications: A Review. IETE Tech. Rev. 2016, 33, 428–440. [Google Scholar] [CrossRef]
- Bilgin, B.; Jiang, J.W.; Emadi, A. Switched Reluctance Motor Drives: Fundamentals to Applications; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Xu, Z.; Li, T.; Zhang, F.; Zhang, Y.; Lee, D.H.; Ahn, J.W. A Review on Segmented Switched Reluctance Motors. Energies 2022, 15, 9212. [Google Scholar] [CrossRef]
- Li, S.; Zhang, S.; Habetler, T.G.; Harley, R.G. Modeling, design optimization, and applications of switched reluctance machines—A review. IEEE Trans. Ind. Appl. 2019, 55, 2660–2681. [Google Scholar] [CrossRef]
- Mishra, A.K.; Singh, B. Solar-powered switched reluctance motor-driven water pumping system with battery support. IET Power Electron. 2021, 14, 1018–1031. [Google Scholar] [CrossRef]
- Lukman, G.F.; Myeong, W.H.; Ahn, J.-W. Design and Analysis of a Low-Cost High-Speed Switched Reluctance Motor for Supercharger. In Proceedings of the 2018 IEEE Student Conference on Electric Machines and Systems, Huzhou, China, 14–16 December 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Vijayakumar, K.; Karthikeyan, R.; Paramasivam, S.; Arumugam, R.; Srinivas, K.N. Switched reluctance motor modeling, design, simulation, and analysis: A comprehensive review. IEEE Trans. Magn. 2008, 44, 4605–4617. [Google Scholar] [CrossRef]
- Diao, K.; Sun, X.; Bramerdorfer, G.; Cai, Y.; Lei, G.; Chen, L. Design Optimization of Switched Reluctance Machines for Performance and Reliability Enhancements: A Review; Elsevier Ltd.: Amsterdam, The Netherlands, 2022. [Google Scholar] [CrossRef]
- Jiang, J.W.; Bilgin, B.; Howey, B.; Emadi, A. Design optimization of switched reluctance machine using genetic algorithm. In Proceedings of the 2015 IEEE International Electric Machines & Drives Conference (IEMDC), Coeur d’Alene, ID, USA, 10–13 May 2015; pp. 1671–1677. [Google Scholar] [CrossRef]
- Chen, M.; Du, W.; Song, W.; Liang, C.; Tang, Y. An improved weighted optimization approach for large-scale global optimization. Complex. Intell. Syst. 2022, 8, 1259–1280. [Google Scholar] [CrossRef]
- Tekgun, D.; Tekgun, B.; Alan, I. FEA based fast topology optimization method for switched reluctance machines. Electr. Eng. 2022, 104, 1985–1995. [Google Scholar] [CrossRef]
- Owatchaiphong, S.; Fuengwarodsakul, N.H. Multi-objective based optimization for switched reluctance machines using fuzzy and genetic algorithms. In Proceedings of the 2009 International Conference on Power Electronics and Drive Systems (PEDS), Taipei, Taiwan, 2–5 November 2009; pp. 1530–1533. [Google Scholar] [CrossRef]
- Gao, X.; Na, R.; Jia, C.; Wang, X.; Zhou, Y. Multi- objective optimization of switched reluctance motor drive in electric vehicles. Comput. Electr. Eng. 2018, 70, 914–930. [Google Scholar] [CrossRef]
- Gonzalez-Villagomez, J.; Rodriguez-Donate, C.; Lopez-Ramirez, M.; Mata-Chavez, R.I.; Palillero-Sandoval, O. Novel Iterative Feedback Tuning Method Based on Overshoot and Settling Time with Fuzzy Logic. Processes 2023, 11, 94. [Google Scholar] [CrossRef]
- Gaafar, M.A.; Abdelmaksoud, A.; Orabi, M.; Chen, H.; Dardeer, M. Switched Reluctance Motor Converters for Electric Vehicles Applications: Comparative Review. IEEE Trans. Transp. Electrif. 2023, 9, 3526–3544. [Google Scholar] [CrossRef]
- Lei, G.; Zhu, J.; Guo, Y. Multidisciplinary Design Optimization Methods for Electrical Machines and Drive Systems; Power Systems Series; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Lei, G.; Wang, T.; Guo, Y.; Zhu, J.; Wang, S. System-level design optimization methods for electrical drive systems: Deterministic approach. IEEE Trans. Ind. Electron. 2014, 61, 6591–6602. [Google Scholar] [CrossRef]
- Zhu, X.; Fan, D.; Xiang, Z.; Quan, L.; Hua, W.; Cheng, M. Systematic multi-level optimization design and dynamic control of less-rare-earth hybrid permanent magnet motor for all-climatic electric vehicles. Appl. Energy 2019, 253, 113549. [Google Scholar] [CrossRef]
- Lei, G.; Zhu, J.; Guo, Y.; Liu, C.; Ma, B. A review of design optimization methods for electrical machines. Energies 2017, 10, 1962. [Google Scholar] [CrossRef]
- Orosz, T.; Rassõlkin, A.; Kallaste, A.; Arsénio, P.; Pánek, D.; Kaska, J.; Karban, P. Robust design optimization and emerging technologies for electrical machines: Challenges and open problems. Appl. Sci. 2020, 10, 6653. [Google Scholar] [CrossRef]
- Li, J.; Li, Y.; Wang, Y. Fuzzy Inference NSGA-III Algorithm-Based Multi-Objective Optimization for Switched Reluctance Generator. IEEE Trans. Energy Convers. 2021, 36, 3578–3581. [Google Scholar] [CrossRef]
- Shah, S.B.; Khalid, M.; Bilgin, B. Design of a Switched Reluctance Motor for an Elevator Application. In Proceedings of the 2024 IEEE Transportation Electrification Conference and Expo, ITEC 2024, Chicago, IL, USA, 19–21 June 2024; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2024. [Google Scholar] [CrossRef]
- Burress, T.; Tolbert, L.M. A framework for multiple objective Co-optimization of switched reluctance machine design and control. In Proceedings of the 2021 IEEE Transportation Electrification Conference and Expo, ITEC 2021, Chicago, IL, USA, 21–25 June 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Ge, H.; Hua, H.; Duan, X.; Li, R. Design and Optimization of High-Speed Switched Reluctance Machines for Aerospace Applications. In Proceedings of the 2024 International Conference on Electrical Machines, ICEM 2024, Torino, Italy, 1–4 September 2024; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2024. [Google Scholar] [CrossRef]
- Anvari, B.; Toliyat, H.A.; Fahimi, B. Simultaneous Optimization of Geometry and Firing Angles for In-Wheel Switched Reluctance Motor Drive. IEEE Trans. Transp. Electrif. 2017, 4, 322–329. [Google Scholar] [CrossRef]
- Ma, B.; Zhu, J.; Lei, G. Advanced Design and Optimization Techniques for Electrical Machines. 2020. Available online: https://www.proquest.com/dissertations-theses/advanced-design-optimization-techniques/docview/2877959791/se-2?accountid=197513 (accessed on 26 February 2025).
- Bhaktha, B.S.; Jose, N.; Vamshik, M.; Pitchaimani, J.; Gangadharan, K.V. Driving Cycle-based Design Optimization and Experimental Verification of a Switched Reluctance Motor for an E-Rickshaw. IEEE Trans. Transp. Electrif. 2024, 10, 9959–9974. [Google Scholar] [CrossRef]
- Yu, Y.; Wang, S.; Qiu, H.; Song, Y. Design and System-Level Optimization of Switched Reluctance Motors for Electric Vehicles Oriented to Complex Scenarios. In Proceedings of the Lecture Notes in Electrical Engineering; Springer Science and Business Media Deutschland GmbH: Berlin/Heidelberg, Germany, 2021; pp. 841–858. [Google Scholar] [CrossRef]
- Cheng, M.; Zhao, X.; Dhimish, M.; Qiu, W.; Niu, S. A Review of Data-driven Surrogate Models for Design Optimization of Electric Motors. IEEE Trans. Transp. Electrif. 2024, 10, 8413–8431. [Google Scholar] [CrossRef]
- Gu, J.; Hua, W.; Yu, W.; Zhang, Z.; Zhang, H. Surrogate Model-Based Multiobjective Optimization of High-Speed PM Synchronous Machine: Construction and Comparison. IEEE Trans. Transp. Electrif. 2023, 9, 678–688. [Google Scholar] [CrossRef]
- Liu, X.; Wang, Z.; Huang, S.; Lou, H. Multi-objective Optimization of Topology and Control Parameters of the Switched Reluctance Motor with 12/8 Poles. In Proceedings of the 2021 IEEE 4th International Electrical and Energy Conference (CIEEC), Wuhan, China, 28–30 May 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Xu, Z.; Cheng, M.; Wen, H.; Jiang, Y. Design and Many-Objective Optimization of an In-Wheel Hybrid-Excitation Flux-Switching Machine Based on the Kriging Model. IEEE Trans. Transp. Electrif. 2024, 11, 2368–2379. [Google Scholar] [CrossRef]
- Qiao, W.; Han, S.; Diao, K.; Sun, X. Optimization Design and Control of Six-Phase Switched Reluctance Motor with Decoupling Winding Connections. Appl. Sci. 2022, 12, 8801. [Google Scholar] [CrossRef]
- Sun, X.; Xu, N.; Ge, S.; Guo, D.; Wan, B. Multilevel and Multiobjective Optimization of a Six-Phase SRM with Bezier Curve. J. Electr. Eng. Technol. 2024, 20, 281–292. [Google Scholar] [CrossRef]
- Diao, K.; Sun, X.; Lei, G.; Guo, Y.; Zhu, J. Application-Oriented System Level Optimization Method for Switched Reluctance Motor Drive Systems. In Proceedings of the 2020 IEEE 9th International Power Electronics and Motion Control Conference, IPEMC 2020 ECCE Asia, Nanjing, China, 29 November–2 December 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020; pp. 472–477. [Google Scholar] [CrossRef]
- Yang, Y.; Sun, X.; Xu, N.; Wan, B.; Yao, M. Design Optimization of a 12/10 Switched Reluctance Motor Considering Target Driving Cycle and Driving Condition. IEEE J. Emerg. Sel. Top Power Electron. 2025. [Google Scholar] [CrossRef]
- Sun, X.; Wan, B.; Lei, G.; Tian, X.; Guo, Y.; Zhu, J. Multiobjective and Multiphysics Design Optimization of a Switched Reluctance Motor for Electric Vehicle Applications. IEEE Trans. Energy Convers. 2021, 36, 3294–3304. [Google Scholar] [CrossRef]
- Mohamodhosen, B.; Riley, C.; Ilea, D. Reduced order modelling method for electromagnetic analysis of electrical machines. IET Sci. Meas. Technol. 2024, 19, e12194. [Google Scholar] [CrossRef]
- Lei, G.; Bramerdorfer, G.; Liu, C.; Guo, Y.; Zhu, J. Robust Design Optimization of Electrical Machines: A Comparative Study and Space Reduction Strategy. IEEE Trans. Energy Convers. 2021, 36, 300–313. [Google Scholar] [CrossRef]
- Moghaddam, H.A.; Vahedi, A.; Ebrahimi, S.H. Design Optimization of Transversely Laminated Synchronous Reluctance Machine for Flywheel Energy Storage System Using Response Surface Methodology. IEEE Trans. Ind. Electron. 2017, 64, 9748–9757. [Google Scholar] [CrossRef]
- Jian, L.; Shi, Y.; Wei, J.; Zheng, Y.; Deng, Z. Design optimization and analysis of a dual-permanent-magnet-excited machine using response surface methodology. Energies 2015, 8, 10127–10140. [Google Scholar] [CrossRef]
- Omar, M.; Sayed, E.; Abdalmagid, M.; Bilgin, B.; Bakr, M.H.; Emadi, A. Review of Machine Learning Applications to the Modeling and Design Optimization of Switched Reluctance Motors. IEEE Access 2022, 10, 130444–130468. [Google Scholar] [CrossRef]
- Tahkola, M.; Keranen, J.; Sedov, D.; Far, M.F.; Kortelainen, J. Surrogate Modeling of Electrical Machine Torque Using Artificial Neural Networks. IEEE Access 2020, 8, 220027–220045. [Google Scholar] [CrossRef]
- Omar, M.; Bakr, M.; Emadi, A. Switched Reluctance Motor Design Optimization: A Framework for Effective Machine Learning Algorithm Selection and Evaluation. In Proceedings of the 2024 IEEE Transportation Electrification Conference and Expo, ITEC 2024, Xi’an, China, 19–21 June 2024; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2024. [Google Scholar] [CrossRef]
- Hussan, U.; Waheed, A.; Bilal, H.; Wang, H.; Hassan, M.; Ullah, I.; Peng, J.; Hosseinzadeh, M. Robust Maximum Power Point Tracking in PV Generation System: A Hybrid ANN-Backstepping Approach With PSO-GA Optimization. IEEE Trans. Consum. Electron. 2025. [Google Scholar] [CrossRef]
- Demidova, G.; Bogdanov, A.; Iaremenko, A.; Xirong, Z.; Chen, H.; Anuchin, A. Neural Network Approaches for Magnetization Surface Prediction in Switched Reluctance Motors: Classical, Radial Basis Function, and Physics-Informed Models. In Proceedings of the IEEE 3rd International Conference on Problems of Informatics, Electronics and Radio Engineering, PIERE 2024, Novosibirsk, Russia, 15–17 November 2024; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2024; pp. 1270–1275. [Google Scholar] [CrossRef]
- Abdollahi, M.E.; Vaks, N.; Bilgin, B. A Multi-objective Optimization Framework for the Design of a High Power-Density Switched Reluctance Motor. In Proceedings of the 2022 IEEE Transportation Electrification Conference and Expo, ITEC 2022, Haining, China, 28–31 October 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022; pp. 67–73. [Google Scholar] [CrossRef]
- Li, S.; Zhang, S.; Jiang, C.; Mayor, J.R.; Habetler, T.G.; Harley, R.G. A fast control-integrated and multiphysics-based multi-objective design optimization of switched reluctance machines. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 730–737. [Google Scholar] [CrossRef]
- Zhang, Z.; Rao, S.; Zhang, X. Performance prediction of switched reluctance motor using improved generalized regression neural networks for design optimization. CES Trans. Electr. Mach. Syst. 2018, 2, 371–376. [Google Scholar] [CrossRef]
- Zhang, J.; Hua, W.; Gao, Y.; Wang, Y.; Zhang, H. An improved Kriging surrogate model method with high robustness for electrical machine optimization. In Proceedings of the 2022 IEEE Transportation Electrification Conference and Expo, Asia-Pacific, ITEC Asia-Pacific 2022, Haining, China, 28–31 October 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022. [Google Scholar] [CrossRef]
- Qiao, W.; Diao, K.; Han, S.; Sun, X. Design optimization of switched reluctance motors based on a novel magnetic parameter methodology. Electr. Eng. 2022, 104, 4125–4136. [Google Scholar] [CrossRef]
- Burress, T.; Tolbert, L.M. Multiple Objective Co-Optimization and Experimental Evaluation of Switched Reluctance Machine Design and Control. In Proceedings of the 2023 IEEE International Electric Machines and Drives Conference, IEMDC 2023, San Francisco, CA, USA, 15–18 May 2023; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2023. [Google Scholar] [CrossRef]
- Huang, C.; Yuan, H.; Wu, Y.; Geng, Y.; Cao, W. A Preference Multi-Objective Optimization Method for Asymmetric External Rotor Switched Reluctance Motor. Prog. Electromagn. Res. C 2022, 124, 179–196. [Google Scholar] [CrossRef]
- Huang, C.; Yuan, H.; Cao, W.; Wu, Y. Multi-Objective Optimization Design of ERSRM with Asymmetric Stator Poles. Prog. Electromagn. Res. C 2023, 129, 257–271. [Google Scholar] [CrossRef]
- Gong, Y.; Zhao, S.; Luo, S. Design and optimization of switched reluctance motor by Taguchi method. In Proceedings of the 2018 13th IEEE Conference on Industrial Electronics and Applications (ICIEA), Wuhan, China, 31 May–2 June 2018; pp. 1876–1880. [Google Scholar] [CrossRef]
- Sun, X.; Shi, Z.; Zhu, J. Multiobjective Design Optimization of an IPMSM for EVs Based on Fuzzy Method and Sequential Taguchi Method. IEEE Trans. Ind. Electron. 2021, 68, 10592–10600. [Google Scholar] [CrossRef]
- Gope, D.; Goel, S.K. Design optimization of permanent magnet synchronous motor using Taguchi method and experimental validation. Int. J. Emerg. Electr. Power Syst. 2021, 22, 9–20. [Google Scholar] [CrossRef]
- Yan, W.; Hu, J.; Chen, H.; Li, H.; Yu, F.; Wang, Q. Design of Novel Hybrid Excitation Segmented-Rotor Switched Reluctance Motor for Electric Vehicle. In Proceedings of the Proceedings of 22nd International Symposium on Power Electronics, Ee 2023, Novi Sad, Serbia, 25–28 October 2023; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2023. [Google Scholar] [CrossRef]
- Diao, K.; Sun, X.; Lei, G.; Bramerdorfer, G.; Guo, Y.; Zhu, J. System-Level Robust Design Optimization of a Switched Reluctance Motor Drive System Considering Multiple Driving Cycles. IEEE Trans. Energy Convers. 2021, 36, 348–357. [Google Scholar] [CrossRef]
- Abunike, C.E.; Okoro, O.I.; Far, A.J.; Aphale, S.S. Advancements in Flux Switching Machine Optimization: Applications and Future Prospects. IEEE Access 2023, 11, 110910–110942. [Google Scholar] [CrossRef]
- Sun, X.; Shi, Z.; Lei, G.; Guo, Y.; Zhu, J. Multi-Objective Design Optimization of an IPMSM Based on Multilevel Strategy. IEEE Trans. Ind. Electron. 2021, 68, 139–148. [Google Scholar] [CrossRef]
- Lei, G.; Wang, T.; Zhu, J.; Guo, Y.; Wang, S. System-Level Design Optimization Method for Electrical Drive Systems—Robust Approach. IEEE Trans. Ind. Electron. 2015, 62, 4702–4713. [Google Scholar] [CrossRef]
- Diao, K.; Sun, X.; Lei, G.; Guo, Y.; Zhu, J. Multiobjective system level optimization method for switched reluctance motor drive systems using finite-element model. IEEE Trans. Ind. Electron. 2020, 67, 10055–10064. [Google Scholar] [CrossRef]
- Hussan, U.; Wang, H.; Ayub, M.A.; Rasheed, H.; Majeed, M.A.; Peng, J.; Jiang, H. Decentralized Stochastic Recursive Gradient Method for Fully Decentralized OPF in Multi-Area Power Systems. Mathematics 2024, 12, 64. [Google Scholar] [CrossRef]
- Ayub, M.A.; Hussan, U.; Rasheed, H.; Liu, Y.; Peng, J.C. Optimal energy management of MG for cost-effective operations and battery scheduling using BWO. Energy Rep. 2024, 12, 294–304. [Google Scholar] [CrossRef]
- Omar, M.; Bakr, M.H.; Emadi, A. Advanced Design Optimization of Switched Reluctance Motors for Torque Improvement Using Supervised Learning Algorithm. IEEE Access 2023, 11, 122057–122068. [Google Scholar] [CrossRef]
- Kocan, S.; Rafajdus, P.; Bastovansky, R.; Lenhard, R.; Stano, M. Design and optimization of a high-speed switched reluctance motor. Energies 2021, 14, 6733. [Google Scholar] [CrossRef]
- Jiang, W.; Jahns, T.M. Coupled electromagnetic/thermal machine design optimization based on finite element analysis with application of artificial neural network. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 5160–5167. [Google Scholar] [CrossRef]
- Yu, Q.; Wang, X.; Cheng, Y. Multiphysics optimization design flow with improved submodels for salient switched reluctance machines. Int. J. Appl. Electromagn. Mech. 2017, 54, 501–514. [Google Scholar] [CrossRef]
- Li, Z.; Wang, J.; Sun, L.; Kang, H.; Liu, L.; Zhou, L. Multi-Objective Optimization of Electromagneticthermal Coupling Performance for High-torquedensity PMSM based on Multi-dimensional Correction Techniques. In Proceedings of the 2024 International Conference on Electrical Machines, ICEM 2024, Torino, Italy, 1–4 September 2024; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2024. [Google Scholar] [CrossRef]
- Li, S.; Zhang, S.; Habetler, T.G.; Harley, R.G. A survey of electromagnetic—Thermal modeling and design optimization of switched reluctance machines. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 21–24 May 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Feng, L.; Sun, X.; Bramerdorfer, G.; Zhu, Z.; Cai, Y.; Diao, K.; Chen, L. A review on control techniques of switched reluctance motors for performance improvement. Renew. Sustain. Energy Rev. 2024, 199, 114454. [Google Scholar] [CrossRef]
- Ma, M.; Ling, F.; Li, F.; Liu, F. Torque ripple suppression of switched reluctance motor by segmented harmonic currents injection based on adaptive fuzzy logic control. IET Electr. Power Appl. 2020, 14, 325–335. [Google Scholar] [CrossRef]
- Cai, J.; Dou, X.; Cheok, A.D.; Ding, W.; Yan, Y.; Zhang, X. Model Predictive Control Strategies in Switched Reluctance Motor Drives-An Overview. IEEE Trans. Power Electron. 2024. [Google Scholar] [CrossRef]
- Valencia, D.F.; Tarvirdilu-Asl, R.; Garcia, C.; Rodriguez, J.; Emadi, A. Vision, Challenges, and Future Trends of Model Predictive Control in Switched Reluctance Motor Drives. IEEE Access 2021, 9, 69926–69937. [Google Scholar] [CrossRef]
- Valencia, D.F.; Tarvirdilu-Asl, R.; Garcia, C.; Rodriguez, J.; Emadi, A. A Review of Predictive Control Techniques for Switched Reluctance Machine Drives. Part I: Fundamentals and Current Control. IEEE Trans. Energy Convers. 2021, 36, 1313. [Google Scholar] [CrossRef]
- Gmyrek, Z. The Impact of the Core Laminate Shaping Process on the Parameters and Characteristics of the Synchronous Reluctance Motor with Flux Barriers in the Rotor. Energies 2025, 18, 1222. [Google Scholar] [CrossRef]
- Falekas, G.; Kolidakis, Z.; Karlis, A. Investigation of Discrepancies Between Induction Motor Test Results and Design Simulation. In Proceedings of the 2024 International Conference on Electrical Machines (ICEM), Torino, Italy, 1–4 September 2024; pp. 1–7. [Google Scholar] [CrossRef]
- Diao, K.; Sun, X.; Lei, G.; Bramerdorfer, G.; Guo, Y.; Zhu, J. Robust Design Optimization of Switched Reluctance Motor Drive Systems Based on System-Level Sequential Taguchi Method. IEEE Trans. Energy Convers. 2021, 36, 3199–3207. [Google Scholar] [CrossRef]
- Diao, K.; Sun, X.; Yao, M. Robust-Oriented Optimization of Switched Reluctance Motors Considering Manufacturing Fluctuation. IEEE Trans. Transp. Electrif. 2022, 8, 2853–2861. [Google Scholar] [CrossRef]
- Sahu, A.K.; Emadi, A.; Bilgin, B. Noise and Vibration in Switched Reluctance Motors: A Review on Structural Materials, Vibration Dampers, Acoustic Impedance, and Noise Masking Methods. IEEE Access 2023, 11, 27702–27718. [Google Scholar] [CrossRef]
- Das, S.; Gundogmus, O.; Sozer, Y.; Kutz, J.; Tylenda, J.; Wright, R.L. Wide Speed Range Noise and Vibration Mitigation in Switched Reluctance Machines with Stator Pole Bridges. IEEE Trans. Power Electron. 2021, 36, 9300–9311. [Google Scholar] [CrossRef]
- Horváth, K.; Zelei, A. Simulating Noise, Vibration, and Harshness Advances in Electric Vehicle Powertrains: Strategies and Challenges. World Electr. Veh. J. 2024, 15, 367. [Google Scholar] [CrossRef]
- Zhang, Z.; Yaman, S.; Salameh, M.; Singh, S.; Chen, C.; Krishnamurthy, M. Effectiveness of power electronic controllers in mitigating acoustic noise and vibration in high-rotor pole srms. Energies 2021, 14, 702. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Kriging Model | RSM | ANN | Models Employing SA | Models Employing DoE | Models Employing SSOM | |
|---|---|---|---|---|---|---|
| Computational time/number of simulations compared to FEM | [30] from 30 min to a few seconds | [14] 559 simulations from 3000 ones (~80% reduction), from 33 h to roughly 6 (~5 times faster) | [50] from 900 candidate models to a fraction of them | [54] 33% fewer parameters in simulations | [61] from 15,625 to 25 simulations (~99.84% reduction) | [66] from 50,000 to 3993 simulations (92% reduction) |
| [36] from 100 thousand to 1125 simulations (~99% reduction) | [55] from 1–3 min to 0.5–3 s | |||||
| [37] from 1331 to 726 simulations (~45% reduction) | [62] from 81 to 18 simulations (78% reduction) | |||||
| [38] from 27 million to 1331 simulations (~99.995% reduction) | [56] 90% down in computation time | |||||
| [40] from a few million to a few thousands | ||||||
| Model accuracy compared to FEM | [30] 1–2% discrepancies | [14] almost 100% accuracy | [50] average error 1.5%, maximum error 3% | [54] max 23% overprediction | [61] maximum error 1% | [66] errors well within 1% in the convergence measure |
| [36] decent accuracy | [55] maximum error 2% | |||||
| [37] 1.79% maximum error | [56] maximum error 5% | [62] maximum error 5% | ||||
| [38] average error 1%, maximum error 3.1% |
| Ref. | Modeling | Optimization Algorithm | System-Level Algorithm | Optimization Parameters Machine/Control | Optimization Goals | Application |
|---|---|---|---|---|---|---|
| [14] | RSM with SA | DE | Single-Level | Geometrical Parameters/ | Torque Ripple, Mass, Copper Losses | In-Wheel application EV |
| [24] | RSM | FIS–NSGA-III | Geometrical | Efficiency, Torque Ripple, Power Density | SRG Drives | |
| [25] | FEM | GA | Average Torque, Torque Ripple | Vertical Transportation | ||
| [26] | FEM | PSO | Geometrical Parameters/ | Efficiency, Torque Ripple, Power Density | SRM Drives | |
| [27] | Field-Circuit-coupled FEM | GA | Efficiency, Mass | Aerospace Applications | ||
| [28,31] | [28] FEM, [31] FEM with SA | [28] NSGA-II, [31] GA | [28] Single-Level, [31] Multi-Level | Average Torque, Torque Ripple, Efficiency | [28] In-Wheel application EV, [31] EV | |
| [30] | Kriging | NSGA-II | Multi-Level | Average Torque, Torque Density, Losses | EV | |
| [34] | PR Model | MOGA | Rotor pole shape/ | Average Torque, Torque Ripple | SRM Drives | |
| [36] | Kriging | NSGA-II | Single-Level | Yoke width ratio/ | Average Torque, Torque Ripple, RMS Current | |
| [37,38,66] | Kriging with SA | [37,38] NSGA-II, [66] SSOM–NSGA-II | [37] Rotor pole shape, [38,66] Geometrical Parameters/ | Average Torque, Torque Ripple, Losses | ||
| [39] | Kriging with SA | GRA with TOPSIS | Multi-Level | Geometrical Parameters/ | Average Torque, Torque Ripple, Losses | EV |
| [40] | FEM with TLPTM–Kriging with SA | NSGA-II | Single-Level | Average Torque, Torque Ripple, Losses, Temperature Rise | ||
| [50] | RBFNN with SA | GA, PSO, GRSM | Multi-Level | Candidate Models/ | Radial Force Harmonics, Torque Ripple, Average Torque | SRM Drives |
| [54] | Analytical Equations with SA | DE | Single-Level | Geometrical Parameters/ | Average Torque, Current Density, Torque Ripple | |
| [55] | Voltage-fed Analytical Equations and FEM | PSO | Single-Level | Geometrical Parameters/ | Average Torque, Torque Ripple, Efficiency | SRM Drives |
| [56,57] | FEM with SA | [56] CD-NSGA-II [57] NSGA-II | [56] Efficiency, Average Torque, [56,57] Torque Ripple | E-Bikes | ||
| [61,62] | Taguchi with SA | Taguchi | Average Torque, Torque Ripple, Torque Density |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tzouvaras, A.; Falekas, G.; Karlis, A. System-Level Optimization in Switched Reluctance Machine Design—Current Trends, Methodologies, and Future Directions. Appl. Sci. 2025, 15, 6275. https://doi.org/10.3390/app15116275
Tzouvaras A, Falekas G, Karlis A. System-Level Optimization in Switched Reluctance Machine Design—Current Trends, Methodologies, and Future Directions. Applied Sciences. 2025; 15(11):6275. https://doi.org/10.3390/app15116275
Chicago/Turabian StyleTzouvaras, Aristotelis, Georgios Falekas, and Athanasios Karlis. 2025. "System-Level Optimization in Switched Reluctance Machine Design—Current Trends, Methodologies, and Future Directions" Applied Sciences 15, no. 11: 6275. https://doi.org/10.3390/app15116275
APA StyleTzouvaras, A., Falekas, G., & Karlis, A. (2025). System-Level Optimization in Switched Reluctance Machine Design—Current Trends, Methodologies, and Future Directions. Applied Sciences, 15(11), 6275. https://doi.org/10.3390/app15116275