
Evaluation of Correlation-Based Methods for Time Period Estimation in Vehicle Speed Measurement Using Pyroelectric Infrared Sensors



Abstract
1. Introduction
1.1. Background
1.2. Related Work
1.3. Contributions
- -
- A detailed mathematical evaluation of conventional and enhanced cross-correlation methods for TPE.
- -
- An investigation into sensor response divergence and its effects on estimation accuracy.
- -
- A numerical analysis of system parameters—including bandwidth, signal-to-noise ratio (SNR), and sensor time constants—to assess their influence on time period estimation performance, complemented by limited experimental validation to compare the overall performance of CCF and CCFHT.
2. Materials and Methods
- -
- Section 2.1 introduces the general bias and variance analysis framework for zero-point estimators, derived mean value theorem, or Taylor expansion.
- -
- Section 2.2 describes the signal modeling of PIR sensors in the context of vehicle speed measurement, highlighting waveform characteristics and inter-sensor mismatches.
- -
- Section 2.3 and Section 2.4 apply the general framework to two specific correlation-based estimators—conventional cross-correlation function (CCF) and Hilbert-enhanced CCF (CCFHT)—to derive analytical expressions for their expected bias and variance under various conditions.
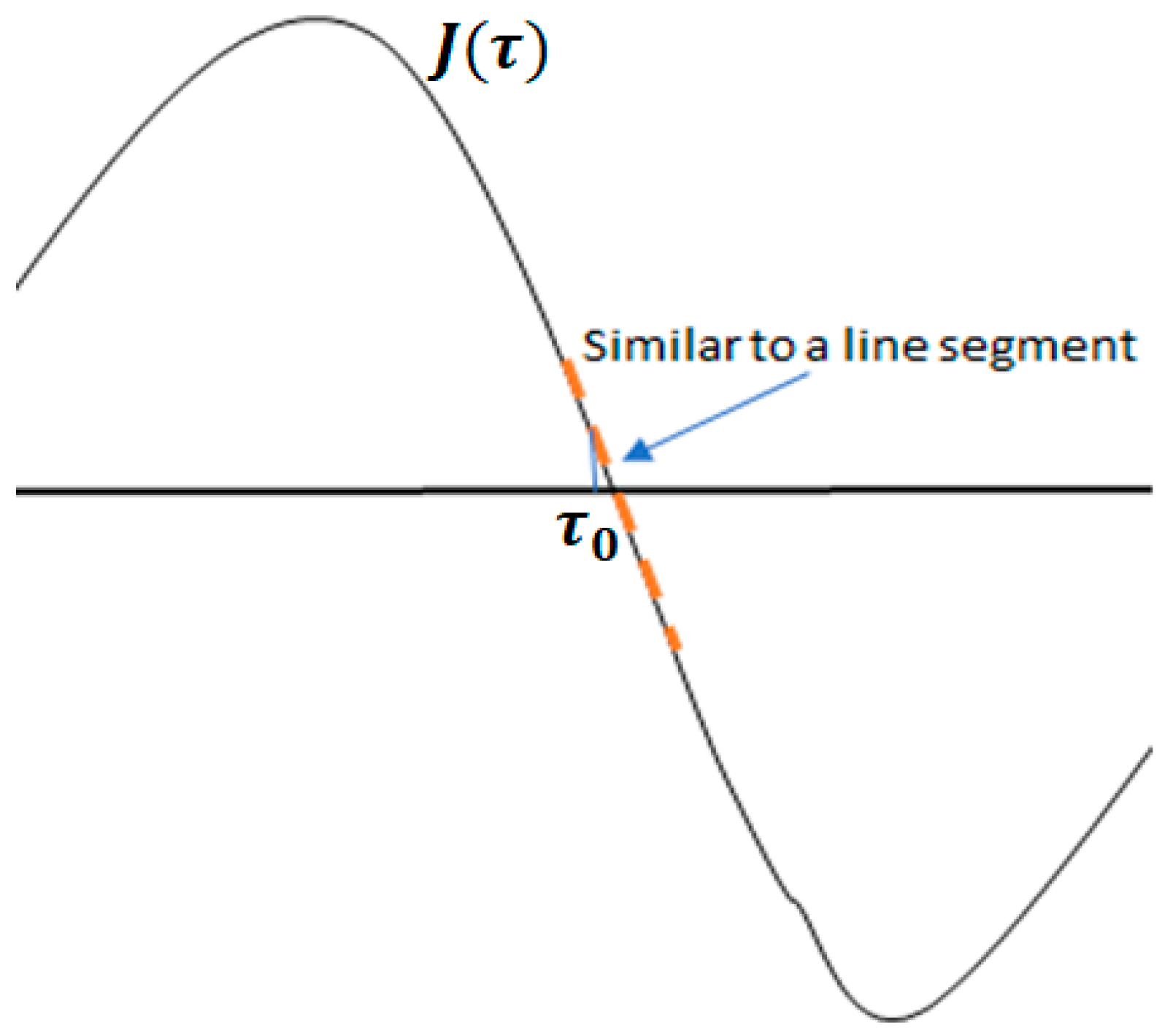
2.1. Analytical Framework for Bias and Variance Analysis of Estimators
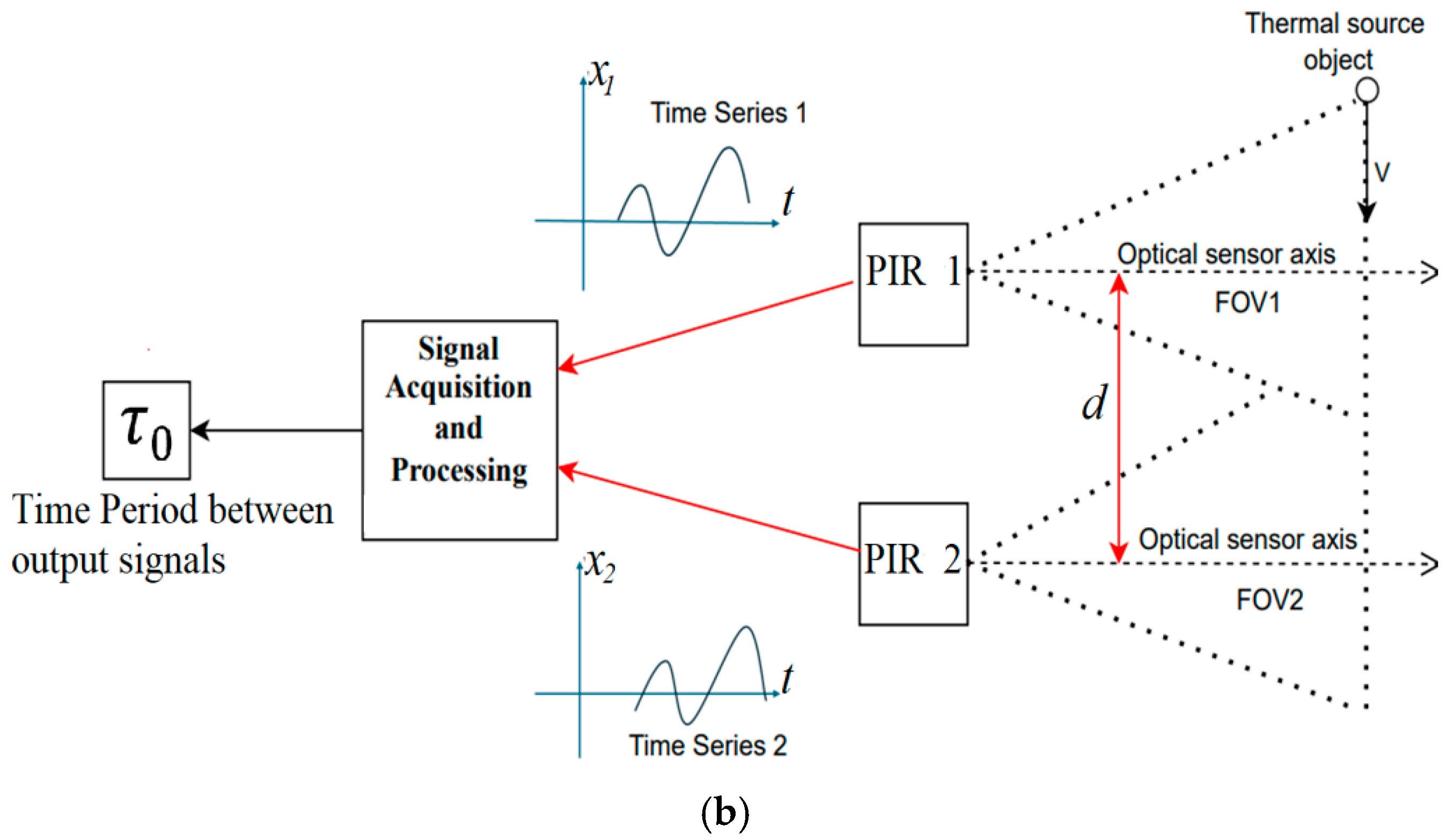
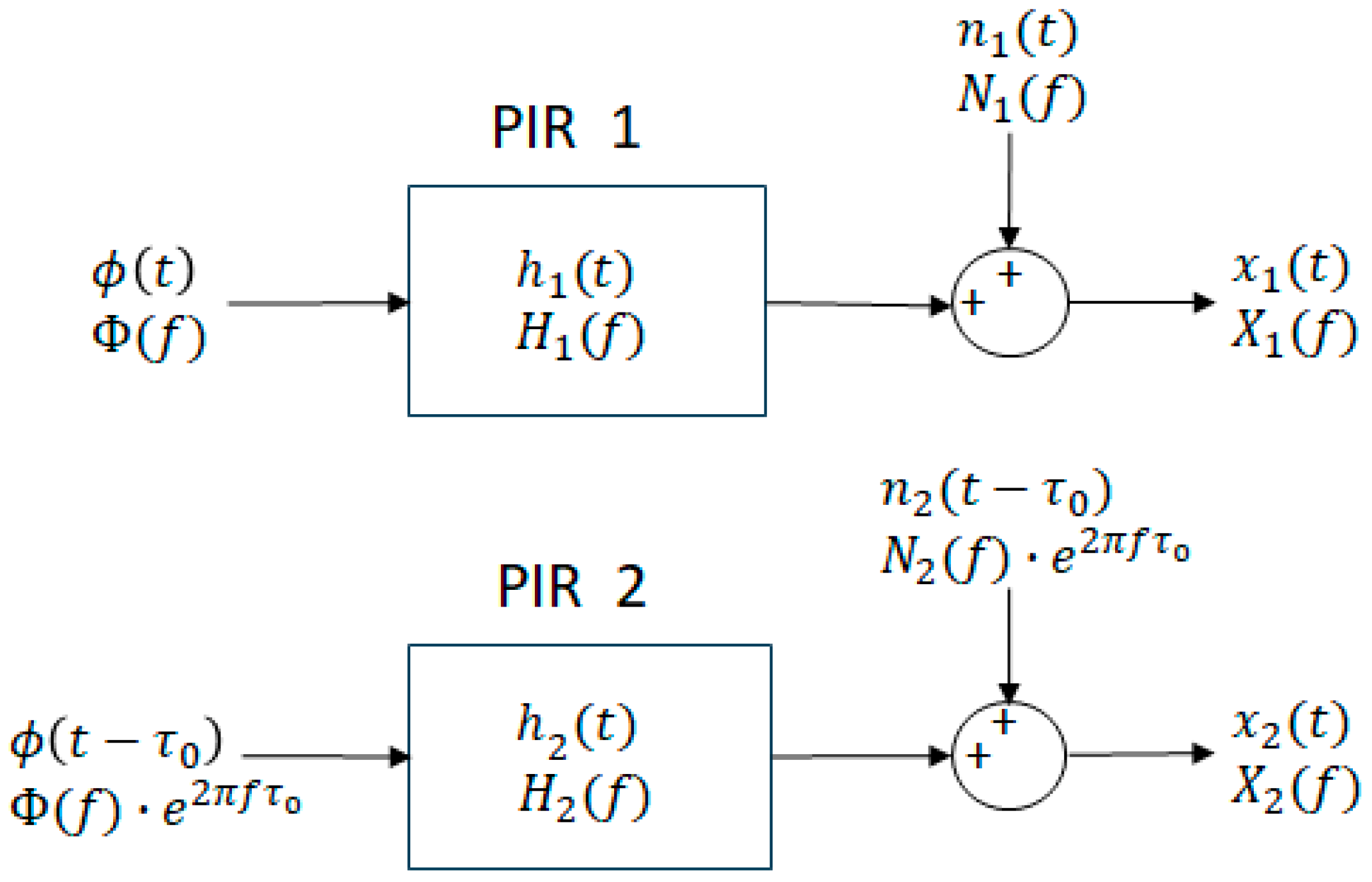
2.2. PIR Signal Modeling for Time Period Estimation
2.3. Bias and Variance Analysis with Conventional Cross-Correlation for TPE
2.4. Bias and Variance Analysis with Cross-Correlation Function Combined with Hilbert Transform for TPE
3. Numerical Results and Experimental Validation
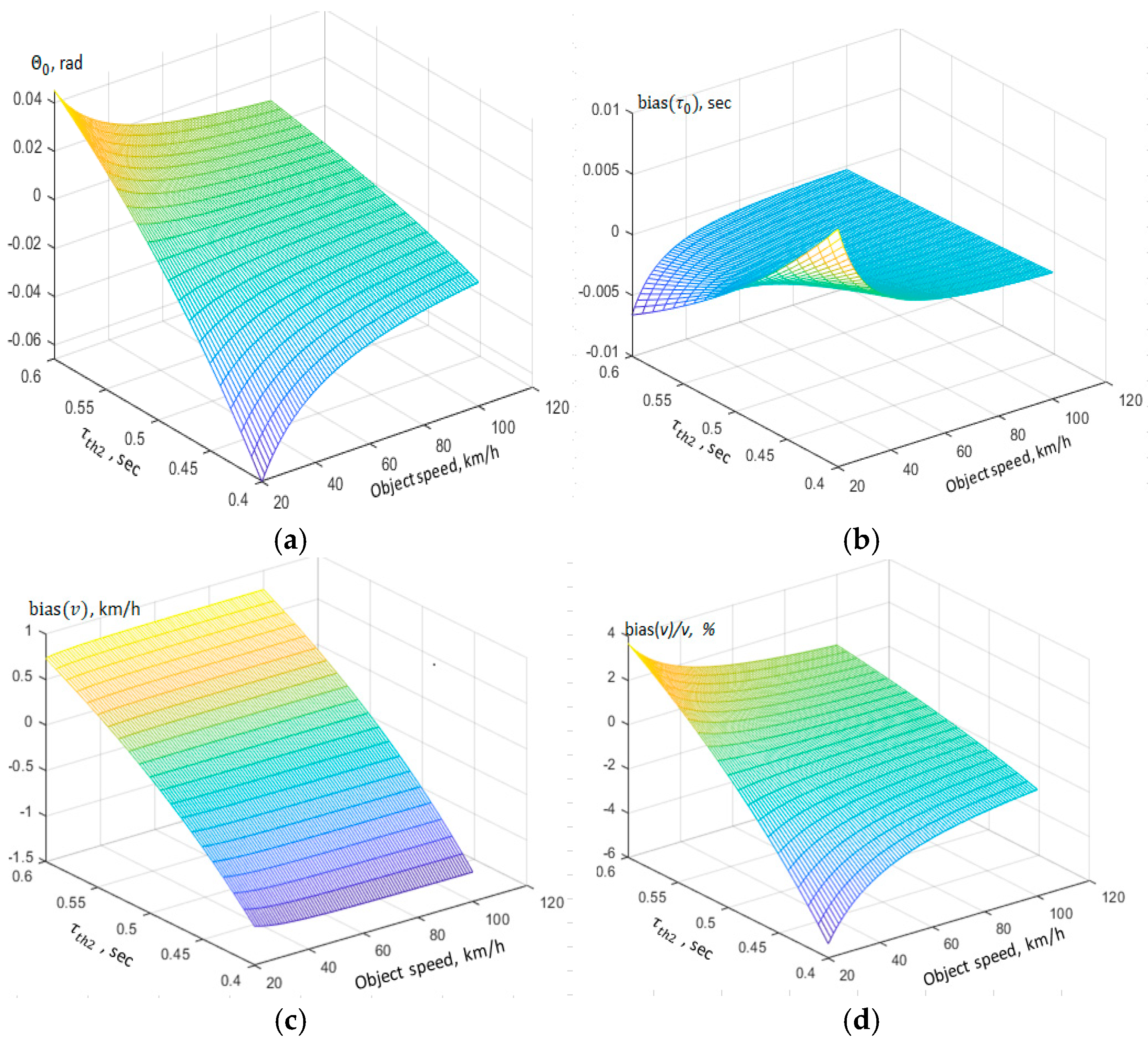
3.1. Numerical Results
3.2. Experimental Validation
4. Discussion
4.1. Effect of Sensor Mismatch on Bias and Variance of Time Period Estimation
4.2. Impact of Bandwidth and Noise on Estimation Variance
4.3. Implications for Practical Deployment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| TPE | Time Period Estimation |
| PIR | Pyroelectric InfraRed |
| ITS | Intelligent Transport System |
| CCF | Cross-Correlation Function |
| CCFHT | Cross-Correlation Function with Hilbert Transform |
References
- Papageorgiou, M.; Diakaki, C.; Dinopoulou, V.; Kotsialos, A.; Wang, Y. Review of road traffic control strategies. Proc. IEEE 2003, 91, 2043–2067. [Google Scholar] [CrossRef]
- Zhang, C.; Shen, S.; Huang, H.; Wang, L. Estimation of the Vehicle Speed Using Cross-Correlation Algorithms and MEMS Wireless Sensors. Sensors 2021, 21, 1721. [Google Scholar] [CrossRef] [PubMed]
- Duda, K.; Marszalek, Z. Vehicle speed determination with inductive-loop technology and fast and accurate fractional time delay estimation by DFT. Metrol. Meas. Syst. 2024, 31, 781–796. [Google Scholar] [CrossRef]
- Kaskonas, P.; Meskuotiene, A. Vehicle Speed Meters Validation and Verification System. Elektron. Elektrotech. 2012, 3, 95–98. [Google Scholar] [CrossRef]
- O’Dwyer, A. Time Delay Estimation in Signal Processing Applications: An Overview. In Proceedings of IT&T Conference; Waterford Institute of Technology: Waterford, Ireland, 2002. [Google Scholar]
- Hing, C.S. Time Delay Estimation: Applications and Algorithms. 2015. Available online: https://sigport.org/sites/default/files/Time_Delay_Estimation.pdf (accessed on 25 April 2025).
- Luz, E.Y.; Mimbela, A. Summary of Vehicle Detection and Surveillance Technologies Used in Intelligent Transportation Systems; Technical Report; The Vehicle Detector Clearinghouse, Southwest Technology Development Institute (SWTDI) at New Mexico State University: Las Cruces, NM, USA, 2007. [Google Scholar]
- Arora, A.; Dutta, P.; Bapat, S.; Kulathumani, V.; Zhang, H.; Naik, V.; Mittal, V.; Cao, H.; Demirbas, M.; Gouda, M.; et al. A line in the sand: A wireless sensor network for target detection, classification, and tracking. Comput. Networks 2004, 46, 605–634. [Google Scholar] [CrossRef]
- Garcia, F.; Cerri, P.; Broggi, A.; Armingol, J.M.; de la Escalera, A. Vehicle detection based on laser radar. In Computer Aided Systems Theory—EUROCAST 2009; Springer: Berlin/Heidelberg, Germany, 2009; pp. 391–397. [Google Scholar]
- Michalopoulos, P.G. Vehicle detection video through image processing: The Autoscope system. IEEE Trans. Veh. Technol. 1991, 40, 21–29. [Google Scholar] [CrossRef]
- Tarik, M.H.; Ahsen, M.B.; Tarek, N.S.; Samir, A.A. Infrared Pyroelectric Sensor for Detection of Vehicular Traffic Using Digital Signal Processing Techniques. IEEE Trans. Veh. Technol. 1995, 44, 683–689. [Google Scholar]
- Odat, E.; Shamma, J.S.; Claudel, C. Vehicle Classification and Speed Estimation Using Combined Passive Infrared/Ultrasonic Sensors. IEEE Trans. Intel. Transp. Syst. 2018, 19, 1593–1606. [Google Scholar] [CrossRef]
- Knapp, C.; Carter, G. The generalized correlation method for estimation of time delay. IEEE Trans. Acoust. Speech Signal Process. 1976, 24, 320–327. [Google Scholar] [CrossRef]
- Carter, G.C. Coherence and time delay estimation. Proc. IEEE 1987, 75, 236–255. [Google Scholar] [CrossRef]
- Brandstein, M.; Ward, D. Microphone Arrays: Signal Processing Techniques and Applications; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Blok, E. Classification and evaluation of discrete subsample time delay estimation algorithms. In Proceedings of the 14th International Conference on Microwaves, Radar and Wireless Communications MIKON-2002, Gdansk, Poland, 20–22 May 2002. [Google Scholar]
- Bendat, J.S.; Piersol, A.G. Random Data—Analysis and Measurement Procedures, 4th ed.; Wiley: New York, NY, USA, 2010. [Google Scholar]
- Costa-Júnior, J.F.; Cortela, G.A.; Maggi, L.E.; Rocha, T.F.; Pereira, W.C.; Costa-Felix, R.P.; Alvarenga, A.V. Measuring uncertainty of ultrasonic longitudinal phase velocity estimation using different time-delay estimation methods based on cross-correlation: Computational simulation and experiments. Measurement 2018, 122, 45–56. [Google Scholar] [CrossRef]
- Lampropoulos, G.; Chan, Y. Time delay estimation with nonstationary signals. In Proceedings of the ICASSP ’86. IEEE International Conference on Acoustics, Speech, and Signal Processing, Tokyo, Japan, 7–11 April 1986. [Google Scholar]
- Pang, Z.; Wang, G.; Wang, B.; Wang, L. Comparison between Time Shifting Deviation and Cross-correlation Methods. J. Light. Technol. 2022, 40, 3003–3009. [Google Scholar] [CrossRef]
- Tamim, S.M.; Ghani, F. Hilbert transform of FFT pruned cross correlation function for optimization in time delay estimation. In Proceedings of the IEEE 9th Malaysia International Conference on Communications (MICC), Kuala Lumpur, Malaysia, 15–17 December 2009. [Google Scholar]
- Osman, A.B.; Ovinis, M.; Hashim, F.M.; Mohammed, K.; Osei, H. Time Delay Estimation Using Continuous Wavelet Transform Coefficients. Adv. Sci. Lett. 2017, 23, 1299–1303. [Google Scholar] [CrossRef]
- Hanus, R. Time delay estimation of random signals using cross-correlation with Hilbert Transform. Measurement 2019, 146, 792–799. [Google Scholar] [CrossRef]
- Donovan, B.; Li, Y.; Stern, R.; Jiang, J.; Claudel, C.; Work, D. Vehicle detection and speed estimation with PIR sensors. In Proceedings of the 14th International Conference on Information Processing in Sensor Networks, Seattle, WT, USA, 13–16 April 2015; pp. 370–371. [Google Scholar]
- Van Quang, V.; Thang, V.T. A novel system for measuring vehicle speed via analog signals of pyroelectric infrared sensors. Int. J. Mod. Phys. B 2021, 35, 2140028. [Google Scholar] [CrossRef]
- So, H.C.; Chan, Y.T.; Ho, K.C.; Chen, Y. Simple Formulas for Bias and Mean Square Error Computation. IEEE Signal Process. Mag. 2013, 30, 162–165. [Google Scholar] [CrossRef]
- Thang, V.T.; Van Quang, V.; Bui, N.T. A Setup for Measuring the Centering Error of a Dual-Element Pyroelectric Infrared Sensor Module. Sensors 2021, 21, 6684. [Google Scholar] [CrossRef]
- Van Quang, V.; Thang, V.T. Measurement uncertainty analysis of centering error of pyroelectric infrared sensor module. Infrared Phys. Technol. 2024, 137, 105124. [Google Scholar] [CrossRef]
- Yun, J.; Song, M.-H. Detecting Direction of Movement Using Pyroelectric Infrared Sensors. IEEE Sens. J. 2014, 14, 1482–1489. [Google Scholar] [CrossRef]
- Bodhibrata, M.; Seshan, S.; Subrat, K. Modeling the Analog Response of Passive Infrared Sensor. Sensors Sens. Actuators A Phys. 2018, 279, 65–74. [Google Scholar]
- Whatmore, R.W. Pyroelectric Devices and Materials. Rep. Prog. Phys. 1999, 49, 1335. [Google Scholar] [CrossRef]
- Pillai, S. Unnikrishna. In Probability, Random Variables, and Stochastic Processes; McGraw-Hill: New York, NY, USA, 2002. [Google Scholar]
- Kay Steven, M. Fundamentals of Statistical Signal Processing: Estimation Theory; Prentice-Hall, Inc.: Hoboken, NJ, USA, 1993. [Google Scholar]
- Faerman, V.; Avramchuk, V.; Voevodin, K.; Sidorov, I.; Kostyuchenko, E. Study of Generalized Phase Spectrum Time Delay Estimation Method for Source Positioning in Small Room Acoustic Environment. Sensors 2022, 22, 965. [Google Scholar] [CrossRef] [PubMed]
- Datasheet of Microcontrollers STM32L476xx. STMicroelectronics. Available online: https://www.st.com/resource/en/datasheet/stm32l476je.pdf (accessed on 25 April 2025).
- Sharkova, S.B.; Faerman, V.A. Wavelet transform-based cross-correlation in the time-delay estimation applications. J. Phys. Conf. Ser. 2021, 2142. [Google Scholar] [CrossRef]
- Shaltaf, S. Neural-Network-Based Time-Delay Estimation. EURASIP J. Adv. Signal Process. 2004, 3, 378–385. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity | Notation in Time Domain | Notation in Frequency Domain |
|---|---|---|
| Difference between infrared fluxes from the interested object incoming on 2 elements of PIR sensor | ||
| Impulse response of PIR 1 | ||
| Impulse response of PIR 2 | ||
| Output signal of PIR 1 | ||
| Output signal of PIR 2 | ||
| Noise signal at PIR 1 | ||
| Noise signal at PIR 2 |
| Quantity, [Unit] | Value |
|---|---|
| , [mm] | 50.9 |
| Sensing element width w, [mm] | 3 |
| Distance between two sensors’ axes d, [m] | 1 |
| Distance to object’s (vehicle’s) movement D, [m] | 10 |
| Length of the object L, [m] | 4.5 |
| (first sensor), [s] | 0.08 |
| (first sensor), [s] | 0.5 |
| (second sensor), [s] | 0.08 |
| (second sensor), [s] | 0.4 ÷ 0.6 |
| Number of discrete frequency bins Nd | 1024 |
| Noise bandwidth B, [Hz] | 10 ÷ 100 |
| Signal-to-noise ratios SNR1 = SNR2 | 10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dang, B.H.; Thang, V.T.; Quang, V.V. Evaluation of Correlation-Based Methods for Time Period Estimation in Vehicle Speed Measurement Using Pyroelectric Infrared Sensors. Appl. Sci. 2025, 15, 6255. https://doi.org/10.3390/app15116255
Dang BH, Thang VT, Quang VV. Evaluation of Correlation-Based Methods for Time Period Estimation in Vehicle Speed Measurement Using Pyroelectric Infrared Sensors. Applied Sciences. 2025; 15(11):6255. https://doi.org/10.3390/app15116255
Chicago/Turabian StyleDang, Bui Hai, Vu Toan Thang, and Vu Van Quang. 2025. "Evaluation of Correlation-Based Methods for Time Period Estimation in Vehicle Speed Measurement Using Pyroelectric Infrared Sensors" Applied Sciences 15, no. 11: 6255. https://doi.org/10.3390/app15116255
APA StyleDang, B. H., Thang, V. T., & Quang, V. V. (2025). Evaluation of Correlation-Based Methods for Time Period Estimation in Vehicle Speed Measurement Using Pyroelectric Infrared Sensors. Applied Sciences, 15(11), 6255. https://doi.org/10.3390/app15116255