


A New Slice Template Matching Method for Full-Field Temporal–Spatial Deflection Measurement of Slender Structures

Abstract
1. Introduction
2. Vision-Based Structural Displacement Measurement Methods
2.1. Digital Image Correlation Theory
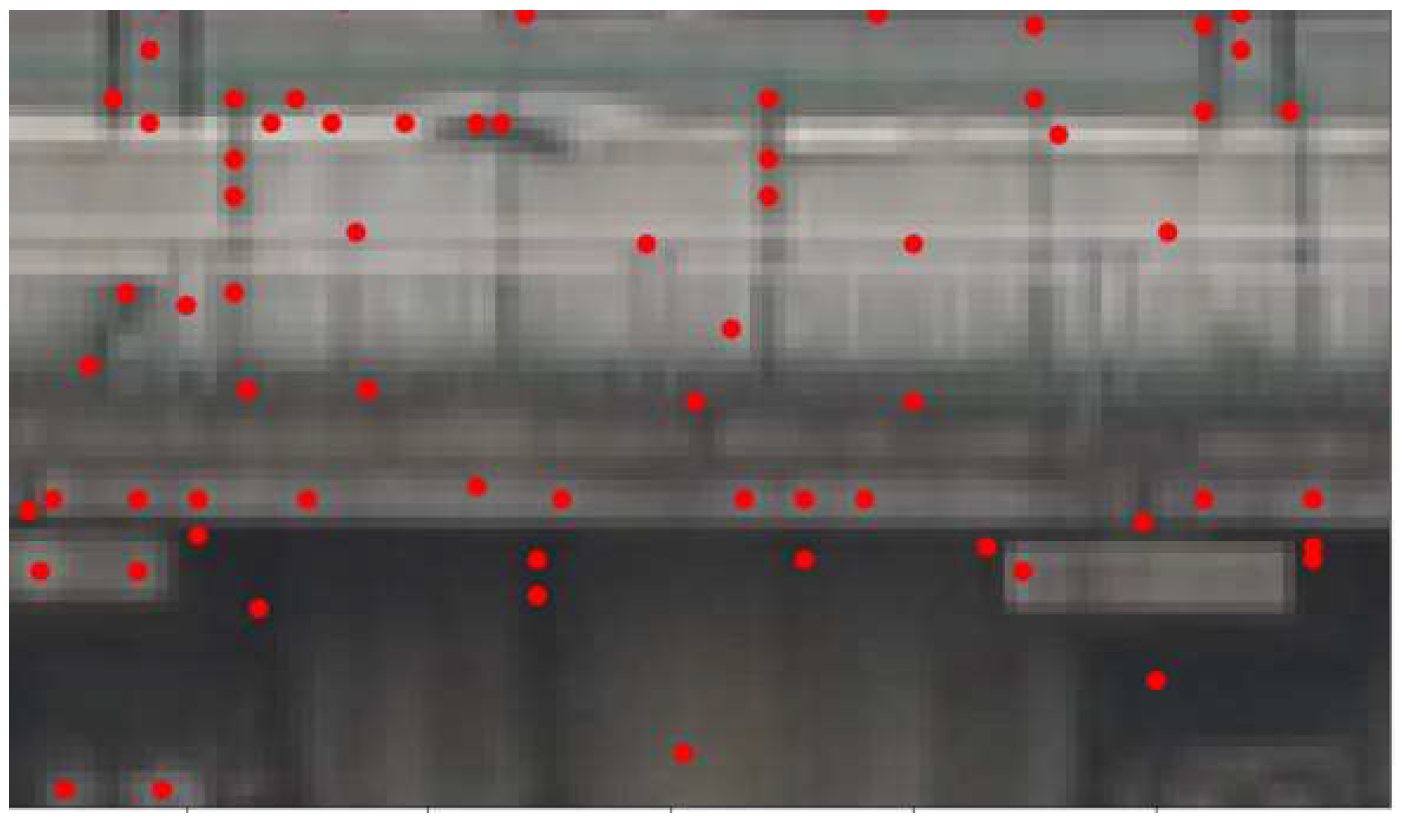
2.2. Feature-Based Motion Tracking
3. Full-Field Temporal–Spatial Displacement Measurement of Large Slender Ratio Structure
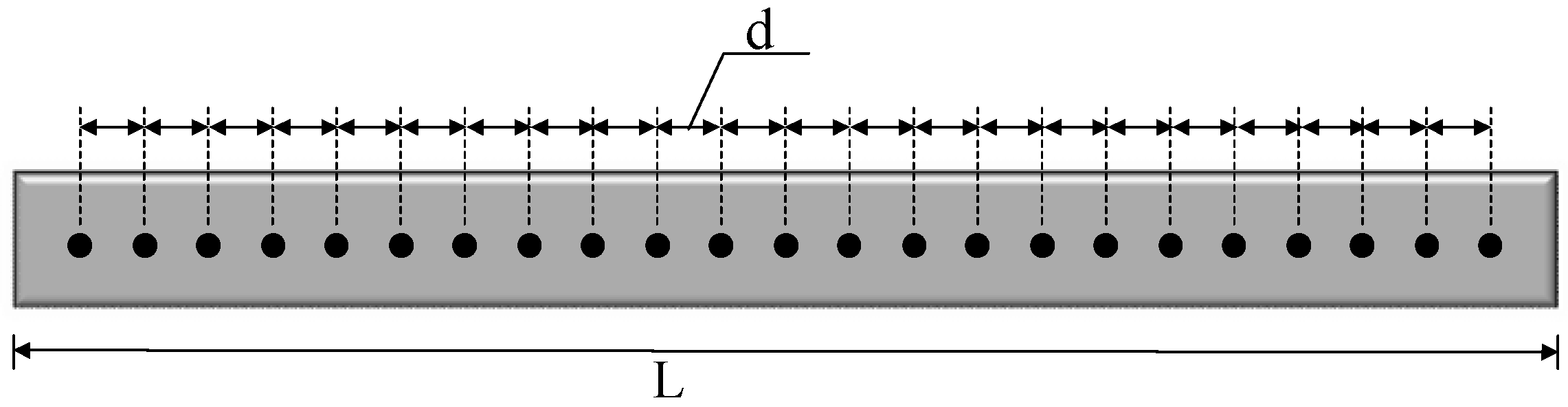
3.1. Priori Knowledge of Slender Structure Geometry and Deformation
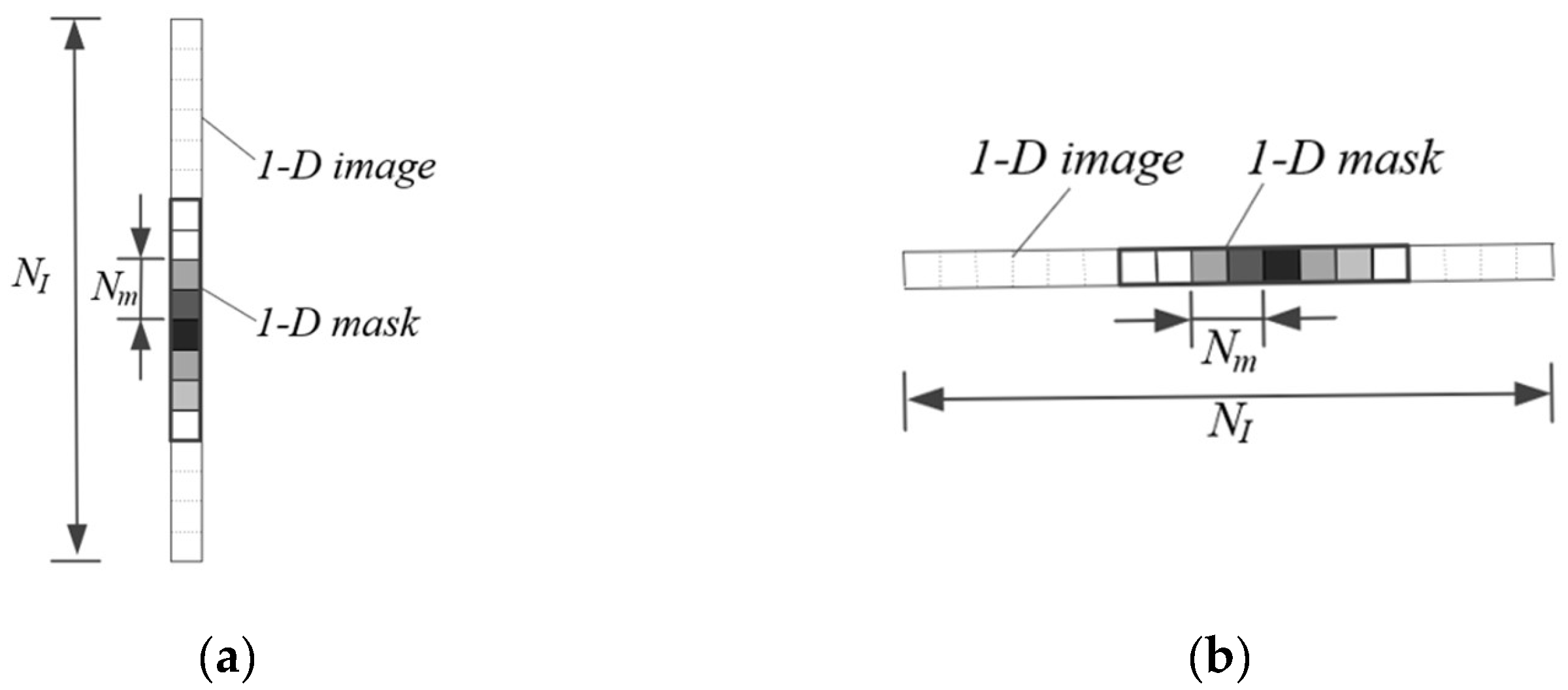
3.2. One-Dimension DIC Model
3.3. Slice Template Matching Model
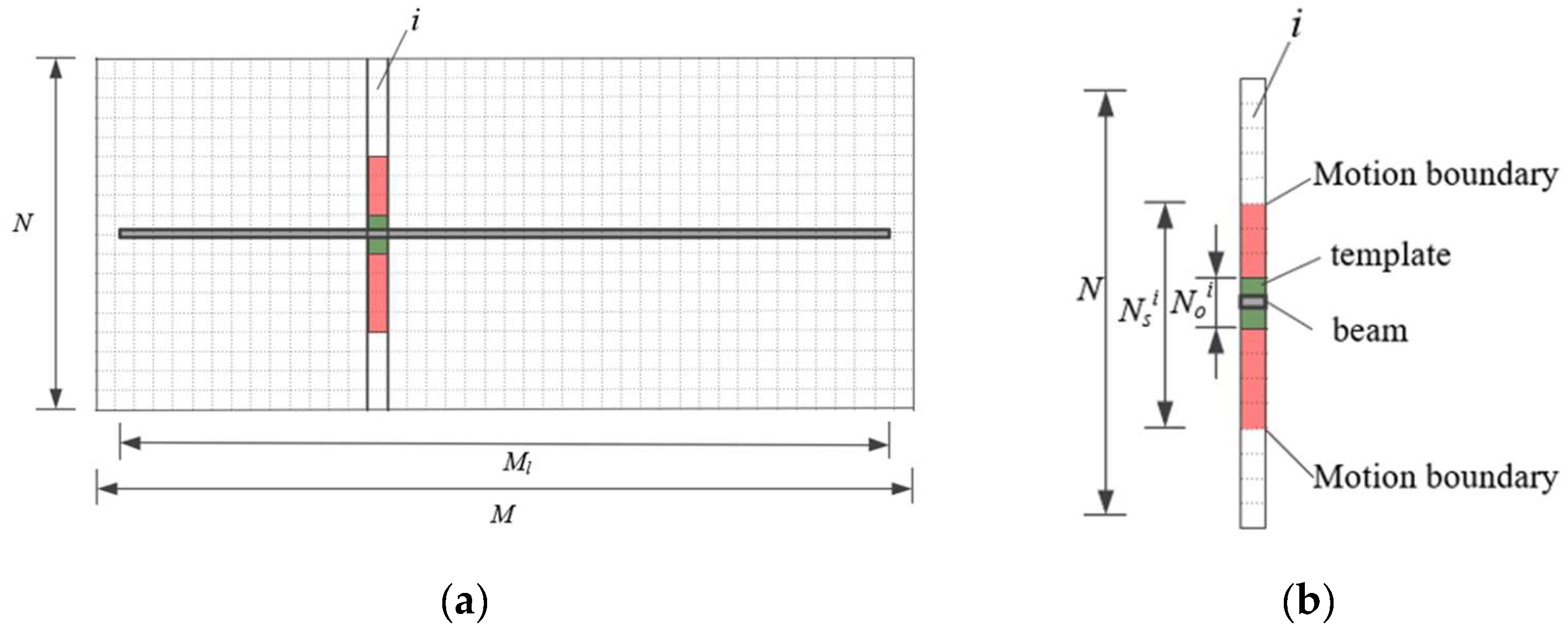
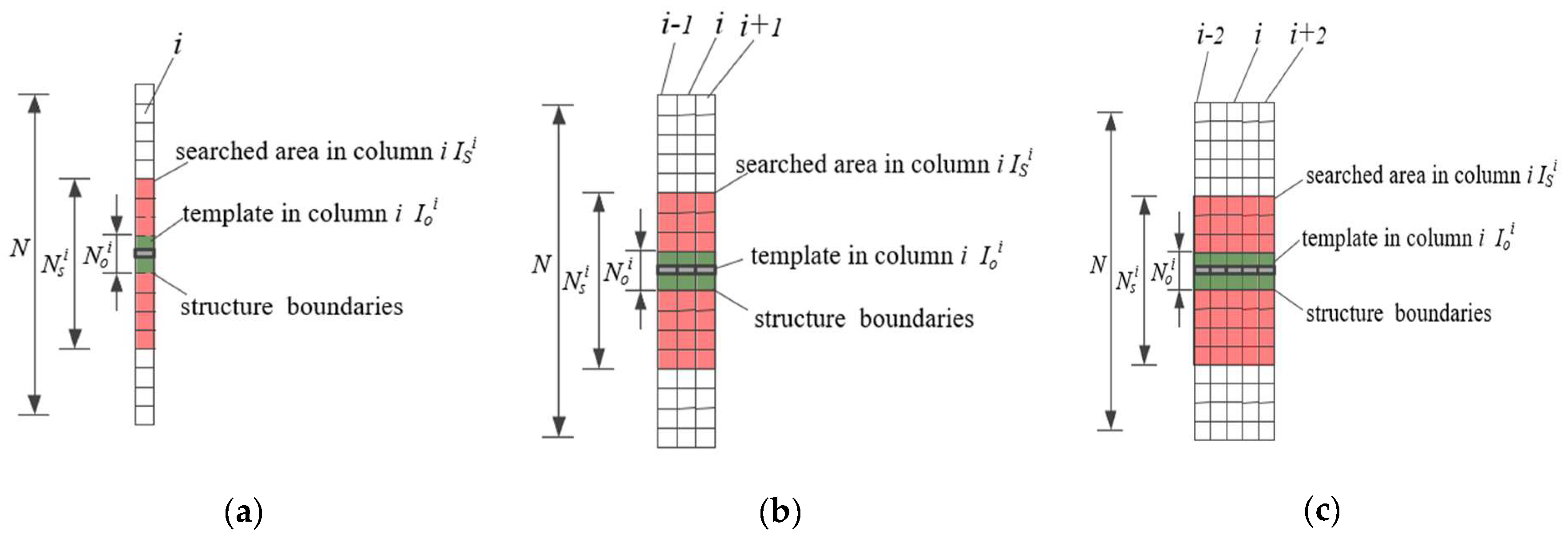
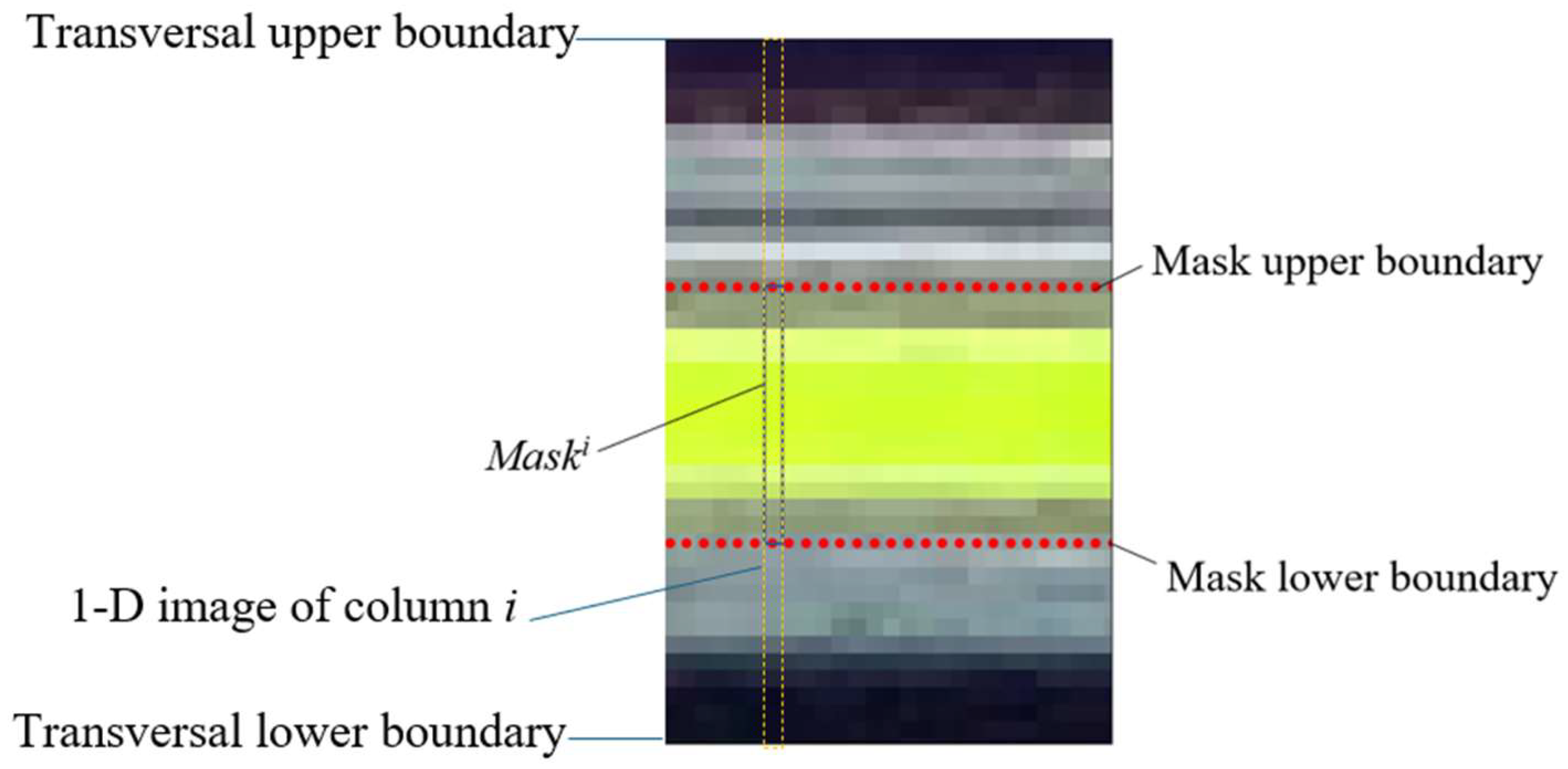
3.3.1. Concept of Single Slice Template Matching Model (STMM)
3.3.2. Multiple Slice Template Matching Model and Implementation Process
4. Experiment Verification
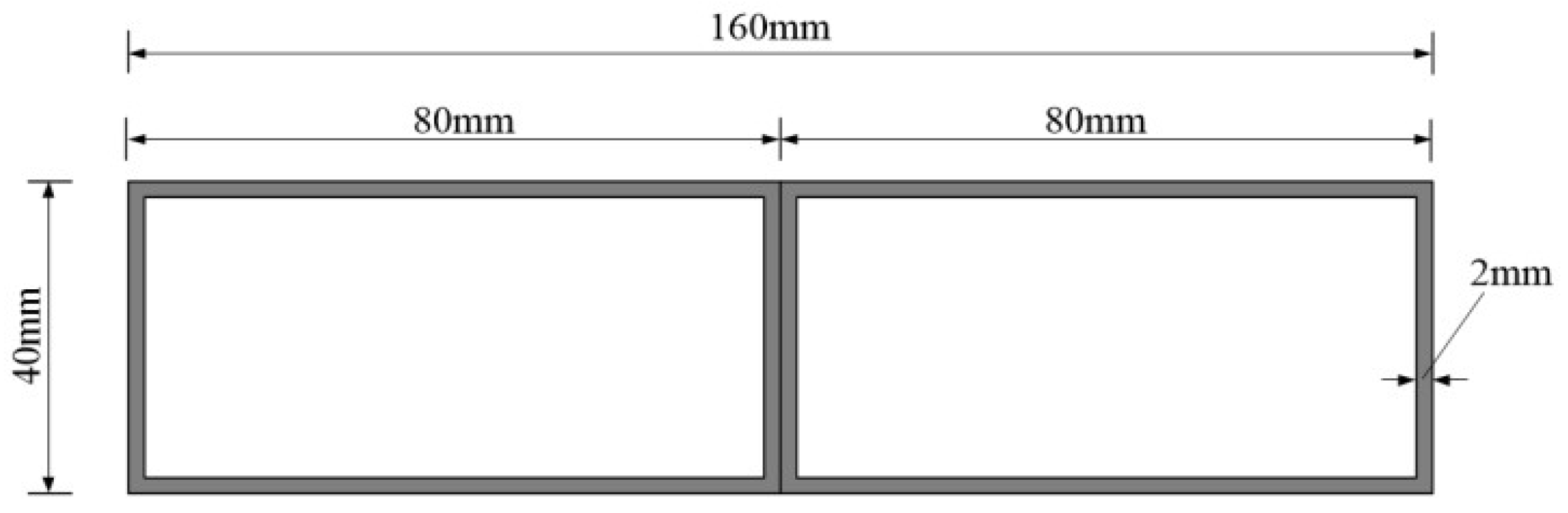
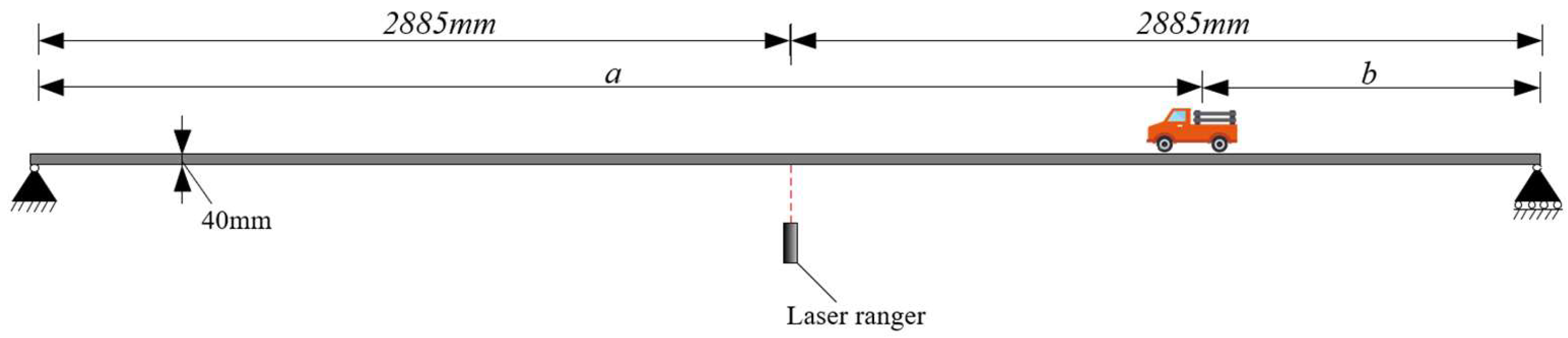
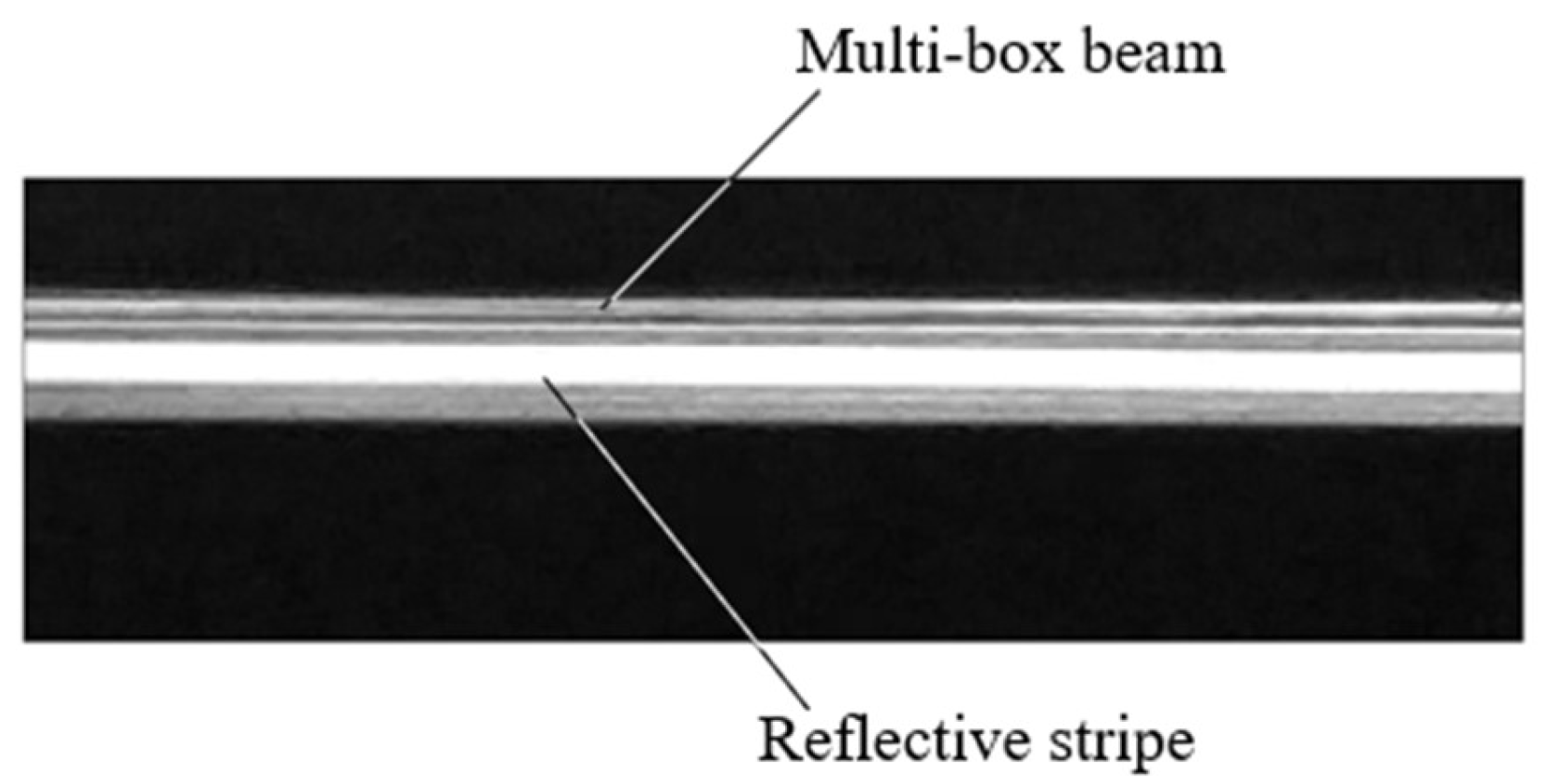
4.1. Experiment Design and Arrangement
4.2. Measurement Error Analysis
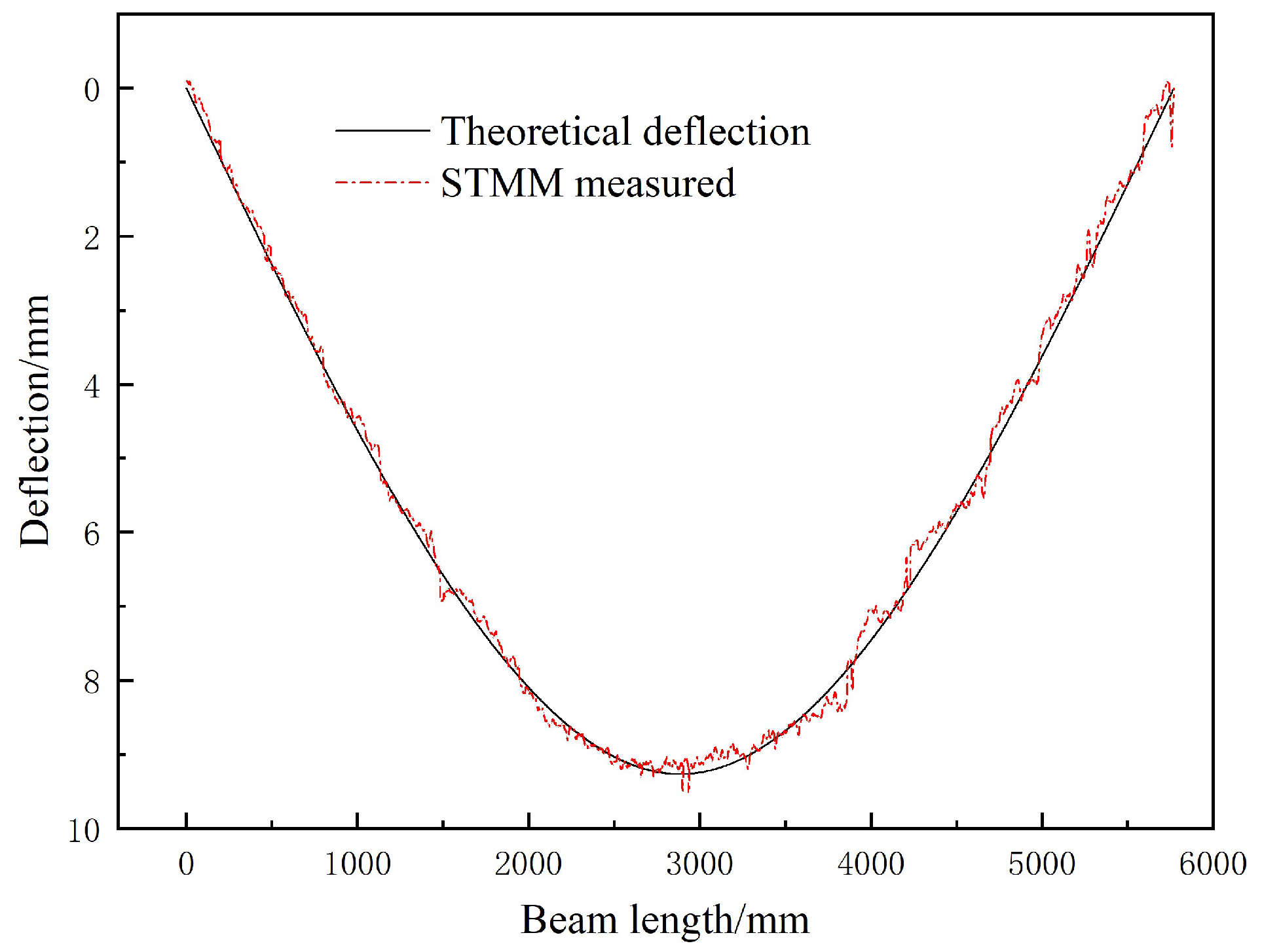
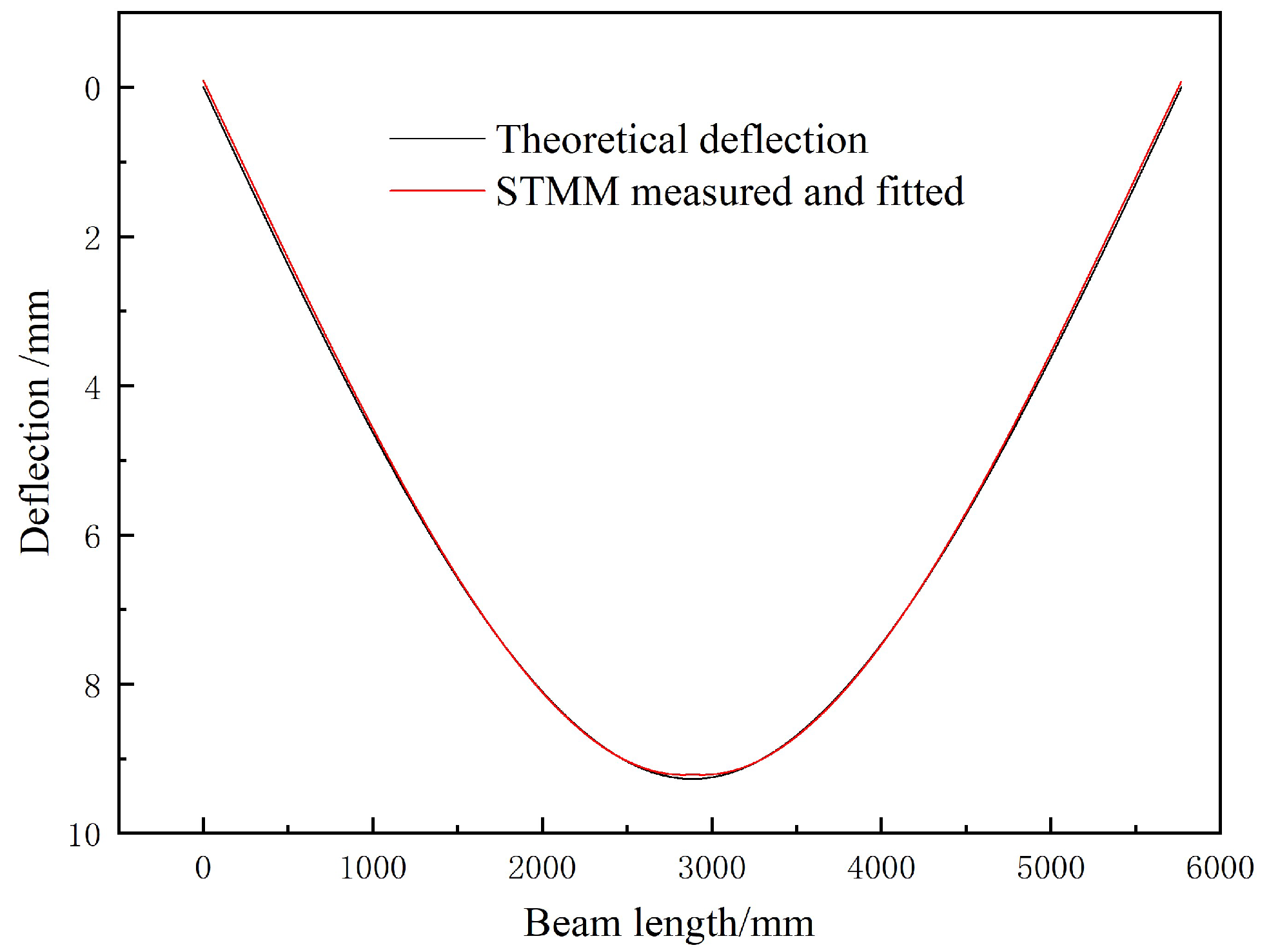
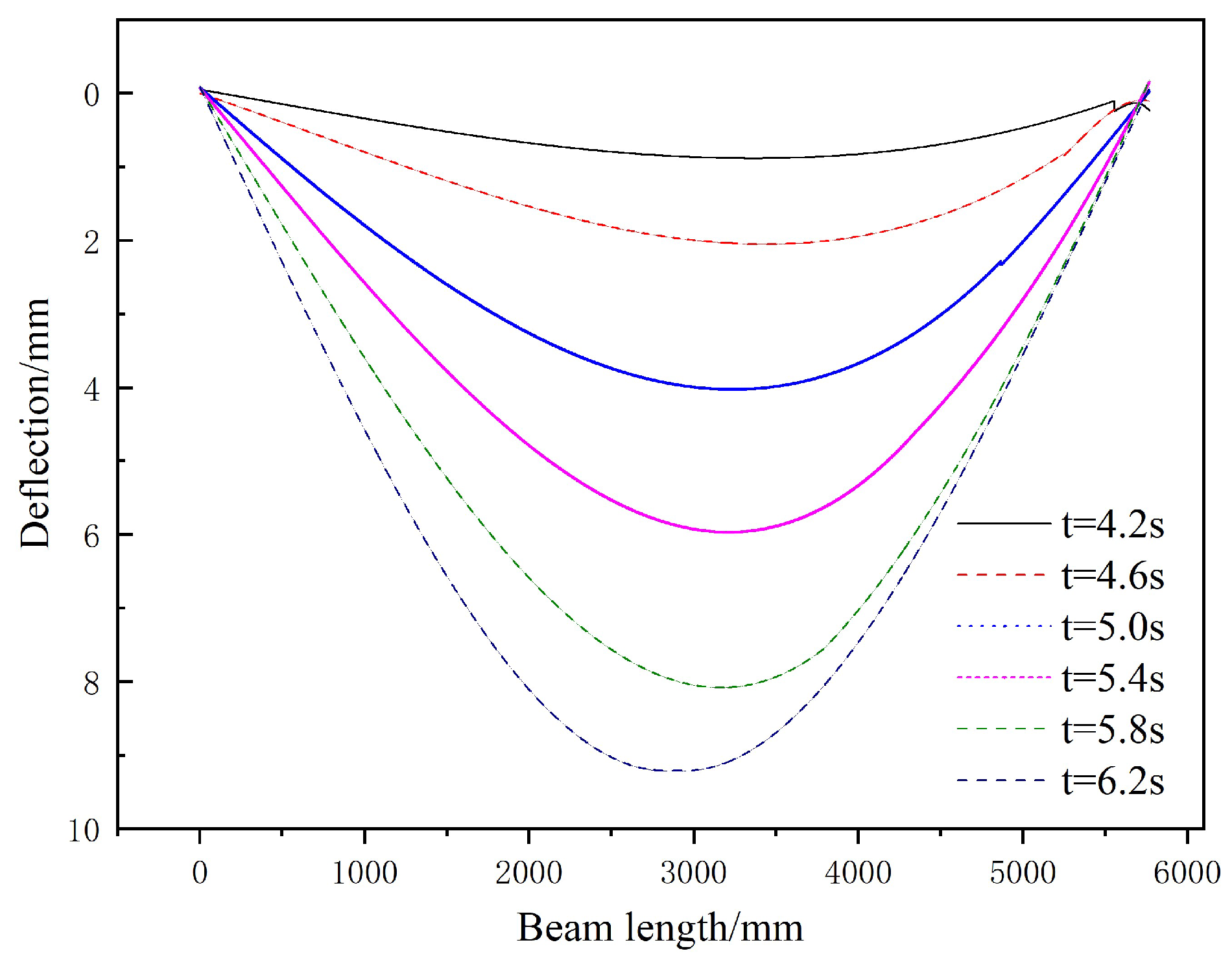
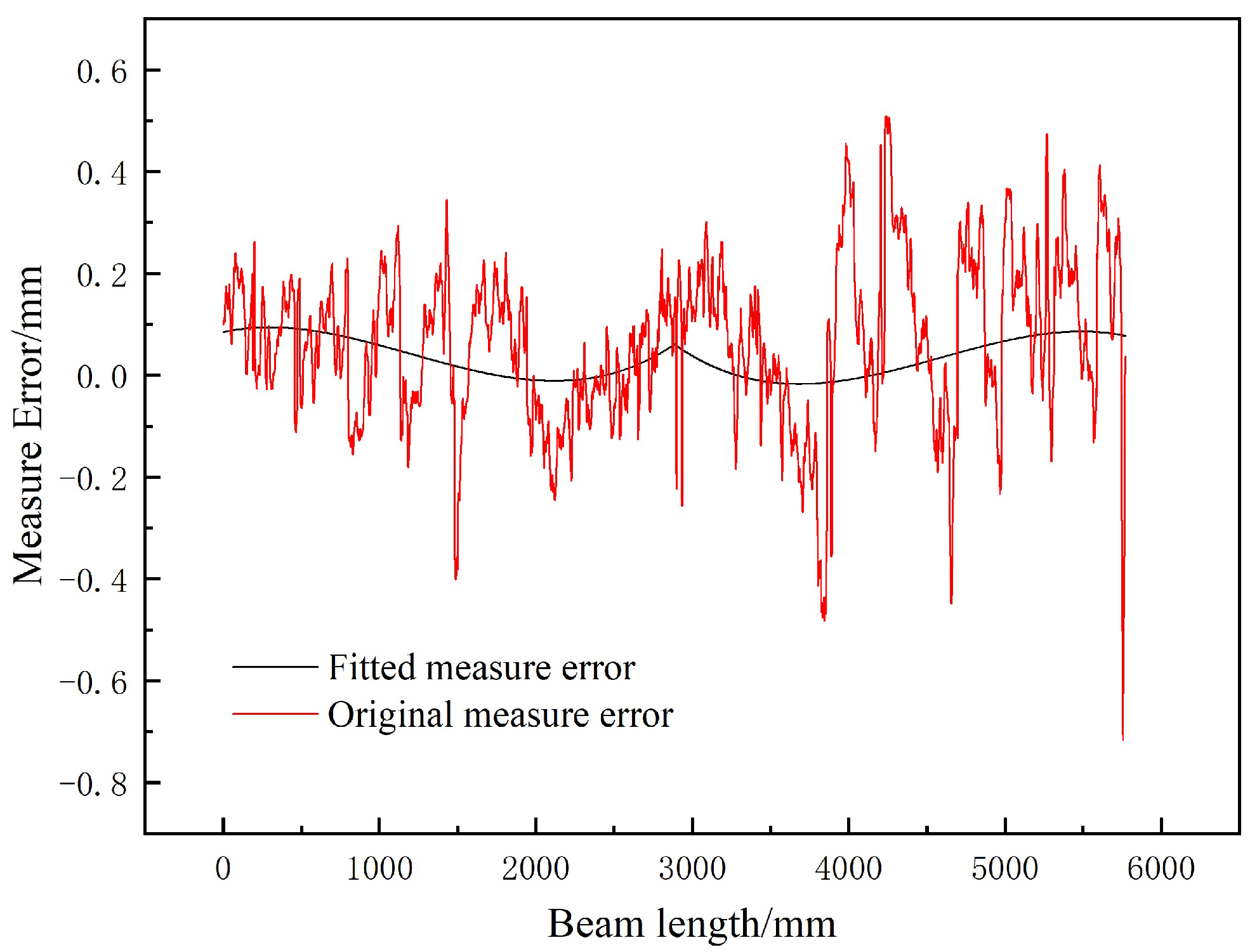
4.2.1. Transient Full-Field Displacement Error Analysis
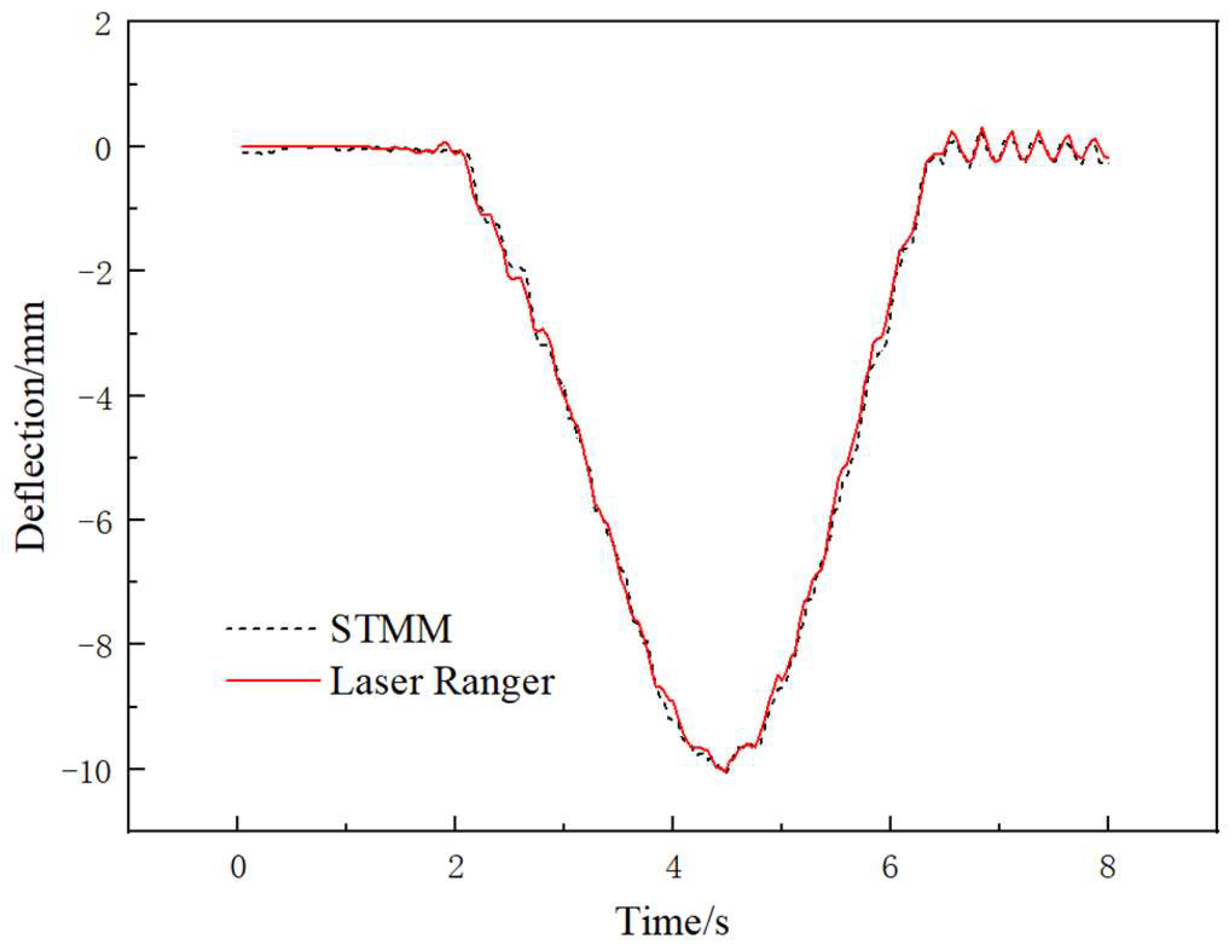
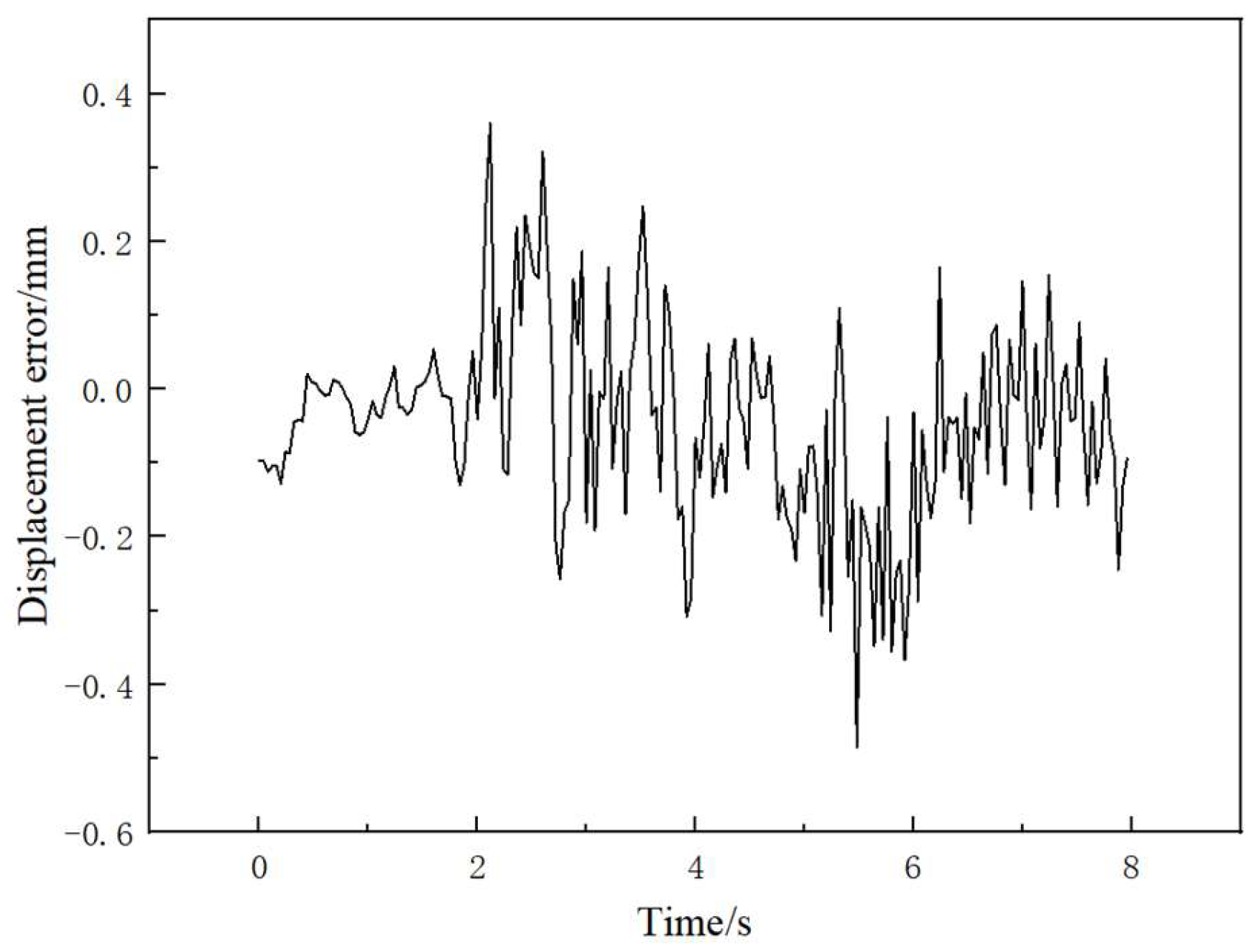
4.2.2. Single Point Dynamic Displacement Measurement Error Analysis
4.3. Measurement Error Source Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ministry of Transport of the People’s Republic of China. Statistical Bulletin on Development of Transport Industry of Year 2023; Ministry of Transport of the People’s Republic of China: Beijing, China, 2024. [Google Scholar]
- Ministry of Transport of the People’s Republic of China. Recommendations of Ministry of Transport on Further Improving the Safety and Durability Level of Highway Bridges; Ministry of Transport of the People’s Republic of China: Beijing, China, 2020. [Google Scholar]
- Tang, Z. Data Anomaly Diagnosis and Reconstruction Based on Deep Learning for Structural Health Monitoring. Ph.D. Thesis, Harbin Institute of Technology, Harbin, China, 2021. [Google Scholar]
- Wang, L.; Wang, Q.; Zhu, Z.; Zhao, Y. Current Status and Prospects of Research on Bridge Health Monitoring Technology. China J. Highw. Transp. 2021, 34, 25–45. [Google Scholar]
- Liu, G.; Gu, J.; Li, M.; He, C. Damage identification method of painted beams based on digital image correlation. J. Civ. Environ. Eng. 2022, 44, 148–157. [Google Scholar]
- Ge, J.; Li, H. Study on bridge damage inspection and identification experiments with mean curvature mode method. J. China Foreign Highw. 2010, 30, 147–150. [Google Scholar]
- Dong, C.; Celik, O.; Catbas, F.N. Marker-free monitoring of the grandstand structures and modal identification using computer vision methods. Struct. Health Monit. 2019, 18, 1491–1509. [Google Scholar] [CrossRef]
- Dong, C.; Catbas, F.N. A review of computer vision-based structural health monitoring at local and global level, Struct. Health Monit. 2020, 20, 692–743. [Google Scholar] [CrossRef]
- Ye, X.; Dong, C. Review of computer vision-based structural displacement monitoring. China J. Highw. Transp. 2019, 32, 20–39. [Google Scholar]
- Feng, D.; Feng, M.Q. Computer Vision for Structural Dynamics and Health Monitoring; John Wiley & Sons: Hoboken, NJ, USA, 2021; pp. 31–57. [Google Scholar]
- Feng, D.; Feng, M.Q. Computer vision for SHM of civil infrastructure: From dynamic response measurement to damage detection-A review. Eng. Struct. 2018, 156, 105–117. [Google Scholar] [CrossRef]
- Zhu, Q.; Chen, J.; Zhang, Q.; Du, Y. A non-contact recognition for deflection influence line of footbridge based on computer vision. Eng. Mech. 2021, 38, 145–153. [Google Scholar] [CrossRef]
- Chu, X. Holographic Shape Monitoring and Damage Identification of Bridge Structure Based on Fixed Axis Rotation Photography. Ph.D. Thesis, Chongqing Jiaotong University, Chongqing, China, 2020. [Google Scholar]
- Zheng, J.; Tang, Y.; Liu, H.; Zhou, Z.; He, J. Research on Full-Field Dynamic Deflection Measurement of Beams Based on Dense Feature Matching and Mismatch Removal Method. Appl. Sci. 2024, 14, 3347. [Google Scholar] [CrossRef]
- Jin, G. Computer Aided Optical Measurement; Qinghua University Press: Beijing, China, 2007; pp. 141–181. [Google Scholar]
- Khuc, T.; Catbas, F.N. Completely contactless structural health monitoring of real-life structures using cameras and computer vision. Struct. Control Health Monit. 2016, 24, 1852. [Google Scholar] [CrossRef]
- Martini, A.; Eleonora, M.T.; Feng, M.Q.; Leung, R.Y. A computer vision-based method for bridge model updating using displacement influence lines. Eng. Struct. 2022, 259, 114129. [Google Scholar] [CrossRef]
- Corbally, R.; Malekjafarian, A. Bridge damage detection using operating deflection shape ratios obtained from a passing vehicle. J. Sound Vib. 2022, 537, 117225. [Google Scholar] [CrossRef]
- He, B.; Cui, J.; Xiao, B.; Wang, X. Image Analysis by Two Types of Franklin-Fourier Moments. IEEE/CAA J. Autom. Sin. 2019, 6, 1036–1051. [Google Scholar] [CrossRef]
- Huang, G. Digital Close Range Photometry Theory, Method and Application; Science Press: Beijing, China, 2019; pp. 97–133. [Google Scholar]
- Detchev, I.; Habib, A.; El-Badry, M. Case study of beam deformation monitoring using conventional close-range photogrammetry. In ASPRS 2011 Annual Conference; ASPRS: Milwaukee, WI, USA, 2011. [Google Scholar]
- Sun, P.; Lu, N.; Dong, M. Simultaneous all-parameters calibration and assessment of a stereo camera pair using a scale bar. Sensors 2018, 18, 3964. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment Device | Model | Technical Parameters |
|---|---|---|
| Video Camera | SONY/FDR-AX40 | Resolution 3840px × 2160px /Frame Rate 25fps |
| Laser Ranger | RIFTEK/R603 | 9600Baud |
| Template Width | Data Types | RMSE/mm | |
|---|---|---|---|
| STMM | Studies | ||
| 1 | Original data | 0.204 | |
| 3 | 0.191 | 0.1~0.2 [15] | |
| 5 | 0.182 | 0.7~2.6 [21] | |
| 11 | 0.169 | 0.1~0.3 [22] | |
| 11 | Fitted data | 0.052 | |
| Source of Data | Correlation Coefficient | Coefficient of Determination |
|---|---|---|
| Reference [17] | 0.9689~0.9887 | 0.9368~0.9775 |
| This Paper | 0.9994 | 0.9986 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, J.; Sang, Y.; Liu, H.; He, J.; Zhou, Z. A New Slice Template Matching Method for Full-Field Temporal–Spatial Deflection Measurement of Slender Structures. Appl. Sci. 2025, 15, 6188. https://doi.org/10.3390/app15116188
Zheng J, Sang Y, Liu H, He J, Zhou Z. A New Slice Template Matching Method for Full-Field Temporal–Spatial Deflection Measurement of Slender Structures. Applied Sciences. 2025; 15(11):6188. https://doi.org/10.3390/app15116188
Chicago/Turabian StyleZheng, Jiayan, Yongzhi Sang, Haijing Liu, Ji He, and Zhixiang Zhou. 2025. "A New Slice Template Matching Method for Full-Field Temporal–Spatial Deflection Measurement of Slender Structures" Applied Sciences 15, no. 11: 6188. https://doi.org/10.3390/app15116188
APA StyleZheng, J., Sang, Y., Liu, H., He, J., & Zhou, Z. (2025). A New Slice Template Matching Method for Full-Field Temporal–Spatial Deflection Measurement of Slender Structures. Applied Sciences, 15(11), 6188. https://doi.org/10.3390/app15116188