
Reconstruction of a 3D Real-World Coordinate System and a Vascular Map from Two 2D X-Ray Pixel Images for Operation of Magnetic Medical Robots



Abstract
1. Introduction
2. Concepts and Applications of TMPR
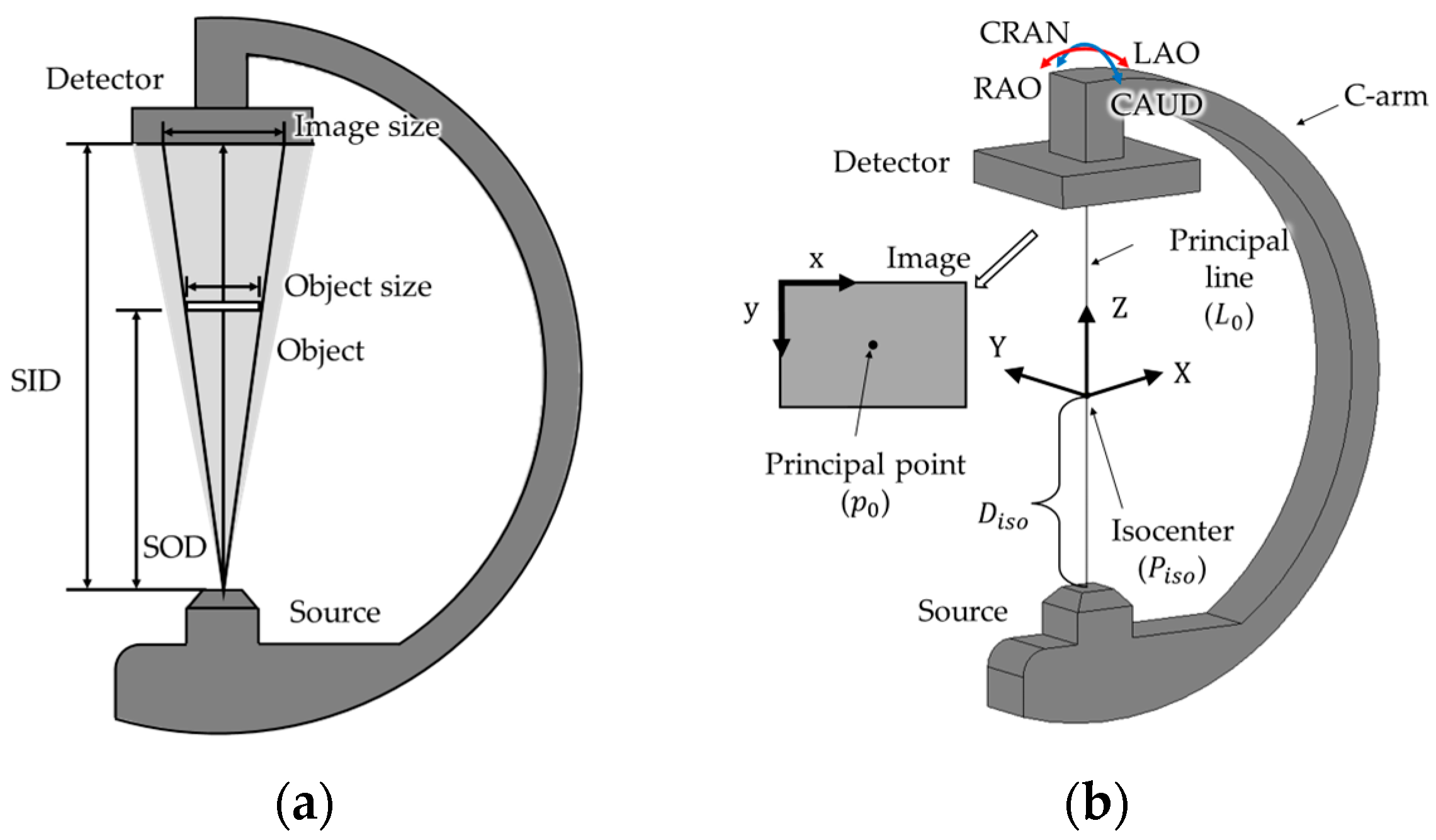
2.1. Magnification Characteristic of X-Ray Images
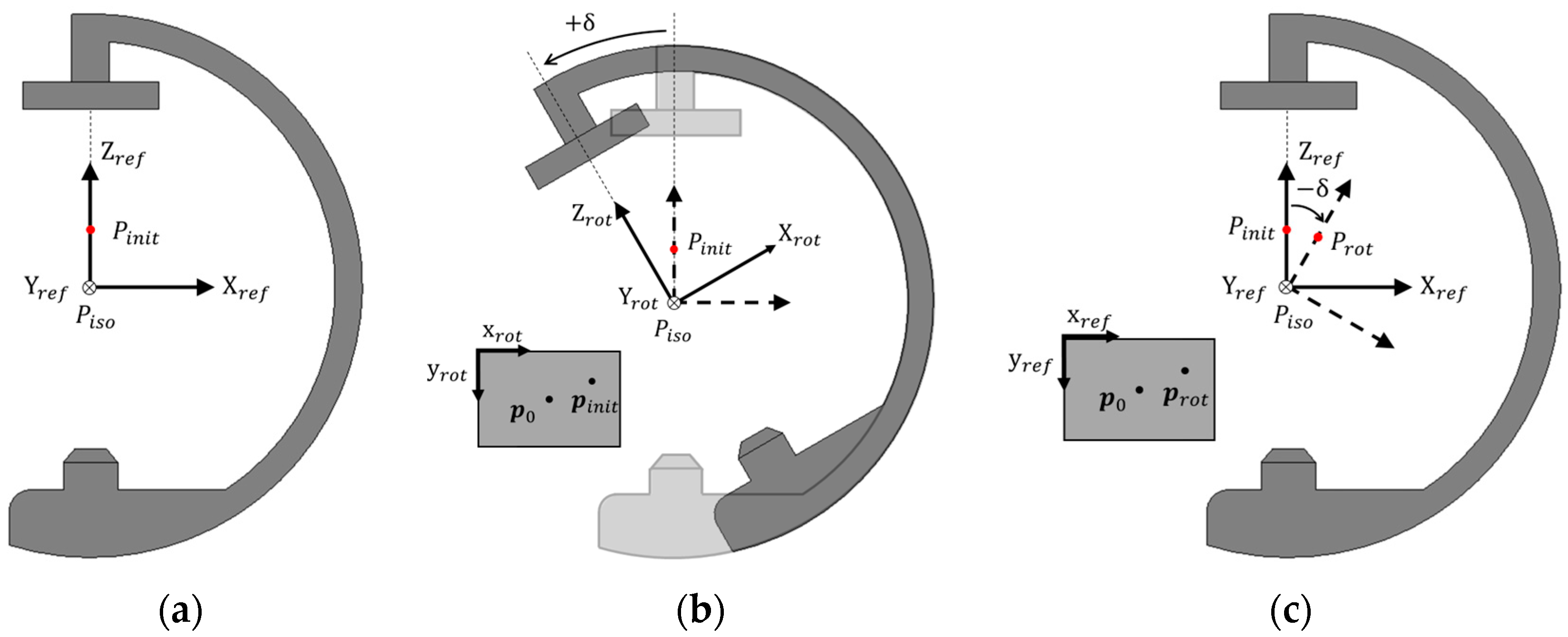
2.2. Motion Characteristic of the C-Arm
2.3. Transformation Method from Two 2D X-Ray Pixel Images to 3D Real-World Coordinates (TMPR)
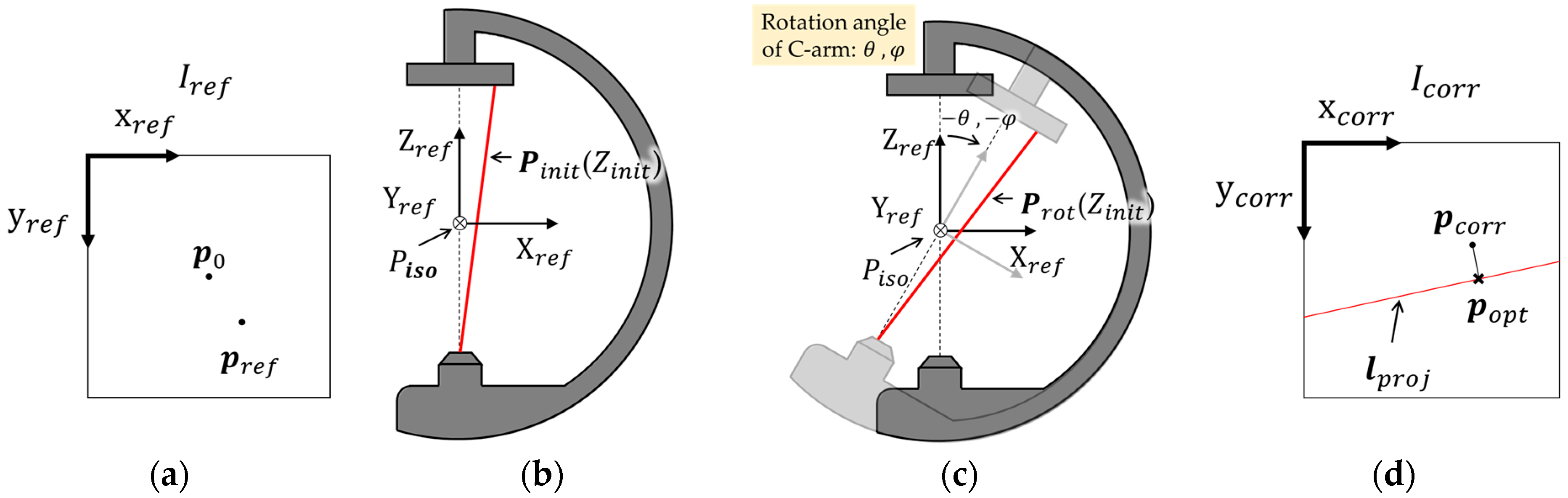
2.4. Calculation of a Relative Rotation Angle of the C-Arm Utilizing TMPR
2.5. Three-Dimensional Centerline Reconstruction of a Vascular Map Utilizing TMPR
3. Experimental Results
3.1. In Vitro Experiment
3.2. In Vivo Experiment
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shamsudhin, N.; Zverev, V.I.; Keller, H.; Pane, S.; Egolf, P.W.; Nelson, B.J.; Tishin, A.M. Magnetically guided capsule endoscopy. Med. Phys. 2017, 44, 91–111. [Google Scholar] [CrossRef] [PubMed]
- Lee, W.; Nam, J.; Kim, J.; Jung, E.; Kim, N.; Jang, G. Steering, tunneling, and stent delivery of a multifunctional magnetic catheter robot to treat occlusive vascular disease. IEEE Trans. Ind. Electron. 2020, 68, 391–400. [Google Scholar] [CrossRef]
- Jung, E.; Nam, J.; Lee, W.; Kim, J.; Jang, G. Crawling magnetic robot to perform a biopsy in tubular environments by controlling a magnetic field. Appl. Sci. 2021, 11, 5292. [Google Scholar] [CrossRef]
- Dodampegama, S.; Mudugamuwa, A.; Konara, M.; Perera, N.; De Silva, D.; Roshan, U.; Tamura, H. A review on the motion of magnetically actuated bio-inspired microrobots. Appl. Sci. 2022, 12, 11542. [Google Scholar] [CrossRef]
- Jeon, S.; Jang, G.; Choi, H.; Park, S. Magnetic navigation system with gradient and uniform saddle coils for the wireless manipulation of micro-robots in human blood vessels. IEEE Trans. Magn. 2010, 46, 1943–1946. [Google Scholar] [CrossRef]
- Kummer, M.P.; Abbott, J.J.; Kratochvil, B.E.; Borer, R.; Sengul, A.; Nelson, B.J. OctoMag: An electromagnetic system for 5-DOF wireless micromanipulation. IEEE Trans. Robot. 2010, 26, 1006–1017. [Google Scholar] [CrossRef]
- Lee, W.; Jung, E.; Kim, N.; Lee, D.; Kim, S.; Lee, Y.; Jang, G. Robotically adjustable magnetic navigation system for medical magnetic milli/microrobots. IEEE/ASME Trans. Mechatron. 2024, 29, 3949–3959. [Google Scholar] [CrossRef]
- Oulmas, A.; Andreff, N.; Régnier, S. Closed-loop 3d path following of scaled-up helical microswimmers. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation, Stockholm, Sweden, 16–21 May 2016. [Google Scholar]
- Wu, X.; Liu, J.; Huang, C.; Su, M.; Xu, T. 3-D path following of helical microswimmers with an adaptive orientation compensation model. IEEE Trans. Autom. Sci. Eng. 2019, 17, 823–832. [Google Scholar] [CrossRef]
- Zhao, H.; Leclerc, J.; Feucht, M.; Bailey, O.; Becker, A.T. 3d path-following using mrac on a millimeter-scale spiral-type magnetic robot. IEEE Robot. Autom. Lett. 2020, 5, 1564–1571. [Google Scholar] [CrossRef]
- Xu, T.; Guan, Y.; Liu, J.; Wu, X. Image-based visual servoing of helical microswimmers for planar path following. IEEE Trans. Autom. Sci. Eng. 2019, 17, 325–333. [Google Scholar] [CrossRef]
- Nguyen, P.B.; Park, J.O.; Park, S.; Ko, S.Y. Medical micro-robot navigation using image processing-blood vessel extraction and X-ray calibration. In Proceedings of the 2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, 26–29 June 2016; pp. 365–370. [Google Scholar]
- Movassaghi, B.; Rasche, V.; Grass, M.; Viergever, M.A.; Niessen, W.J. A quantitative analysis of 3-D coronary modeling from two or more projection images. IEEE Trans. Med. Imaging 2004, 23, 1517–1531. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Wang, Y.; Liu, Y.; Tang, S.; Chen, W. Novel approach for 3-D reconstruction of coronary arteries from two uncalibrated angiographic images. IEEE Trans. Image Process. 2009, 18, 1563–1572. [Google Scholar] [CrossRef] [PubMed]
- Fu, Z.; Fu, Z.; Gong, Z.; Feng, X.; Gu, H.; Xie, R.; Fei, J. Optimization for 3D reconstruction of coronary artery tree by two-stage Levenberg-Marquardt algorithm. In Proceedings of the 2021 27th International Conference on Mechatronics and Machine Vision in Practice, Shanghai, China, 26–28 November 2021. [Google Scholar]
- Chen, S.J.; Carroll, J.D. 3-D reconstruction of coronary arterial tree to optimize angiographic visualization. IEEE Trans. Med. Imaging 2000, 19, 318–336. [Google Scholar] [CrossRef]
- Banerjee, A.; Galassi, F.; Zacur, E.; De Maria, G.L.; Choudhury, R.P.; Grau, V. Point-cloud method for automated 3D coronary tree reconstruction from multiple non-simultaneous angiographic projections. IEEE Trans. Med. Imaging 2019, 39, 1278–1290. [Google Scholar] [CrossRef]
- Blondel, C.; Malandain, G.; Vaillant, R.; Ayache, N. Reconstruction of coronary arteries from a single rotational X-ray projection sequence. IEEE Trans. Med. Imaging 2006, 25, 653–663. [Google Scholar] [CrossRef] [PubMed]
- Liao, R.; Luc, D.; Sun, Y.; Kirchberg, K. 3-D reconstruction of the coronary artery tree from multiple views of a rotational X-ray angiography. Int. J. Cardiovasc. Imaging 2010, 26, 733–749. [Google Scholar] [CrossRef]
- Cesar, A.; Grkman, M.; Medic, M. Magnification error in radiographs of cervical spine in lateral projection. Med. Imaging Radiother. J. 2020, 37, 15–19. [Google Scholar] [CrossRef]
- Çimen, S.; Gooya, A.; Grass, M.; Frangi, A.F. Reconstruction of coronary arteries from X-ray angiography: A review. Med. Image Anal. 2016, 32, 46–68. [Google Scholar] [CrossRef]
- Boykov, Y.; Veksler, O.; Zabih, R. Fast approximate energy minimization via graph cuts. IEEE Trans. Pattern Anal. Mach. Intell. 2001, 23, 1222–1239. [Google Scholar] [CrossRef]
- Sandgren, T.; Sonesson, B.; Ahlgren, Å.R.; Länne, T. The diameter of the common femoral artery in healthy human: Influence of sex, age, and body size. J. Vasc. Surg. 1999, 29, 503–510. [Google Scholar] [CrossRef]
- Sa, J.; Park, J.; Jung, E.; Kim, N.; Lee, D.; Bae, S.; Jang, G. Separable and recombinable magnetic robot for robotic endovascular intervention. IEEE Robot. Autom. Lett. 2023, 8, 1881–1888. [Google Scholar] [CrossRef]
- Lee, S.; Kim, N.; Kwon, J.; Jang, G. Identification of the position of a tethered delivery catheter to retrieve an untethered magnetic robot in a vascular environment. Micromachines 2023, 14, 724. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| [°] | [°] | 2D Errors [mm] | 3D Errors | ||||
|---|---|---|---|---|---|---|---|
| Max. | Min. | Mean | Max. | Min. | Mean | ||
| −15 | −10 | 0.266 | 0.003 | 0.101 | 1.883 | 0.022 | 0.669 |
| −5 | 0.231 | 0.001 | 0.097 | 1.088 | 0.004 | 0.438 | |
| 0 | 0.197 | 0.001 | 0.073 | 0.881 | 0.000 | 0.357 | |
| 5 | 0.249 | 0.001 | 0.113 | 0.879 | 0.007 | 0.279 | |
| 10 | 0.312 | 0.003 | 0.119 | 1.189 | 0.010 | 0.336 | |
| −10 | −10 | 0.305 | 0.001 | 0.089 | 1.552 | 0.012 | 0.521 |
| −5 | 0.250 | 0.002 | 0.089 | 2.079 | 0.007 | 0.528 | |
| 0 | 0.181 | 0.006 | 0.125 | 2.479 | 0.048 | 0.943 | |
| 5 | 0.240 | 0.003 | 0.093 | 1.516 | 0.004 | 0.336 | |
| 10 | 0.308 | 0.001 | 0.103 | 1.162 | 0.004 | 0.368 | |
| 10 | −10 | 0.401 | 0.003 | 0.099 | 1.533 | 0.007 | 0.447 |
| −5 | 0.341 | 0.003 | 0.098 | 3.203 | 0.007 | 0.781 | |
| 0 | 0.190 | 0.001 | 0.103 | 2.442 | 0.038 | 0.946 | |
| 5 | 0.456 | 0.005 | 0.101 | 1.589 | 0.007 | 0.409 | |
| 10 | 0.782 | 0.003 | 0.105 | 2.617 | 0.036 | 1.168 | |
| 15 | −10 | 0.318 | 0.001 | 0.103 | 1.821 | 0.016 | 0.670 |
| −5 | 0.292 | 0.001 | 0.101 | 1.826 | 0.034 | 0.770 | |
| 0 | 0.193 | 0.003 | 0.089 | 1.642 | 0.217 | 0.911 | |
| 5 | 0.263 | 0.005 | 0.111 | 1.707 | 0.015 | 0.574 | |
| 10 | 0.311 | 0.002 | 0.118 | 2.133 | 0.016 | 0.870 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, N.; Lee, S.; Kwon, J.; Jang, G. Reconstruction of a 3D Real-World Coordinate System and a Vascular Map from Two 2D X-Ray Pixel Images for Operation of Magnetic Medical Robots. Appl. Sci. 2025, 15, 6089. https://doi.org/10.3390/app15116089
Kim N, Lee S, Kwon J, Jang G. Reconstruction of a 3D Real-World Coordinate System and a Vascular Map from Two 2D X-Ray Pixel Images for Operation of Magnetic Medical Robots. Applied Sciences. 2025; 15(11):6089. https://doi.org/10.3390/app15116089
Chicago/Turabian StyleKim, Nahyun, Serim Lee, Junhyoung Kwon, and Gunhee Jang. 2025. "Reconstruction of a 3D Real-World Coordinate System and a Vascular Map from Two 2D X-Ray Pixel Images for Operation of Magnetic Medical Robots" Applied Sciences 15, no. 11: 6089. https://doi.org/10.3390/app15116089
APA StyleKim, N., Lee, S., Kwon, J., & Jang, G. (2025). Reconstruction of a 3D Real-World Coordinate System and a Vascular Map from Two 2D X-Ray Pixel Images for Operation of Magnetic Medical Robots. Applied Sciences, 15(11), 6089. https://doi.org/10.3390/app15116089