
Kolmogorov–Arnold Networks for Reduced-Order Modeling in Unsteady Aerodynamics and Aeroelasticity

Abstract
1. Introduction
2. Reduced-Order Modeling
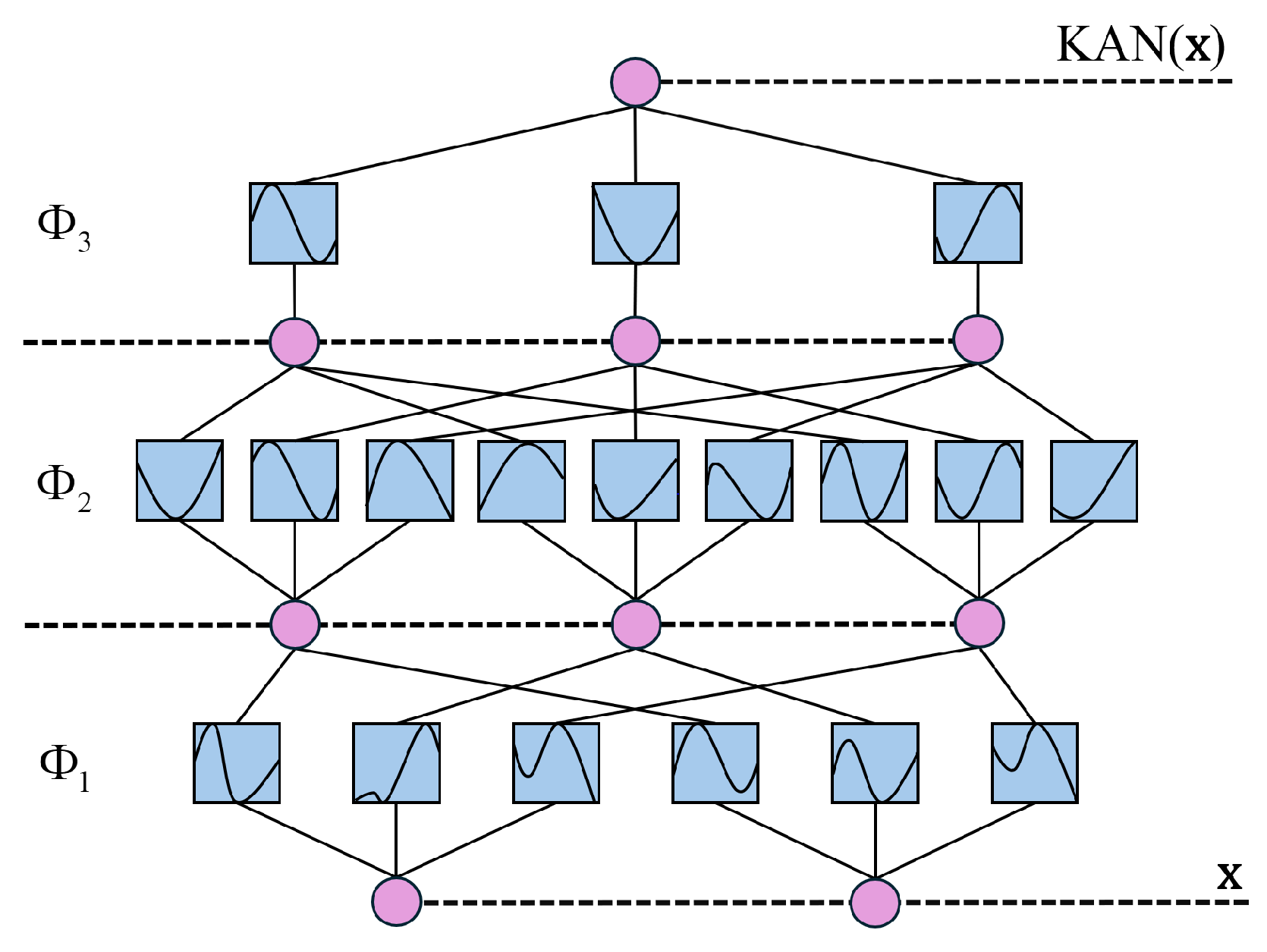
2.1. Kolmogorov–Arnold Networks
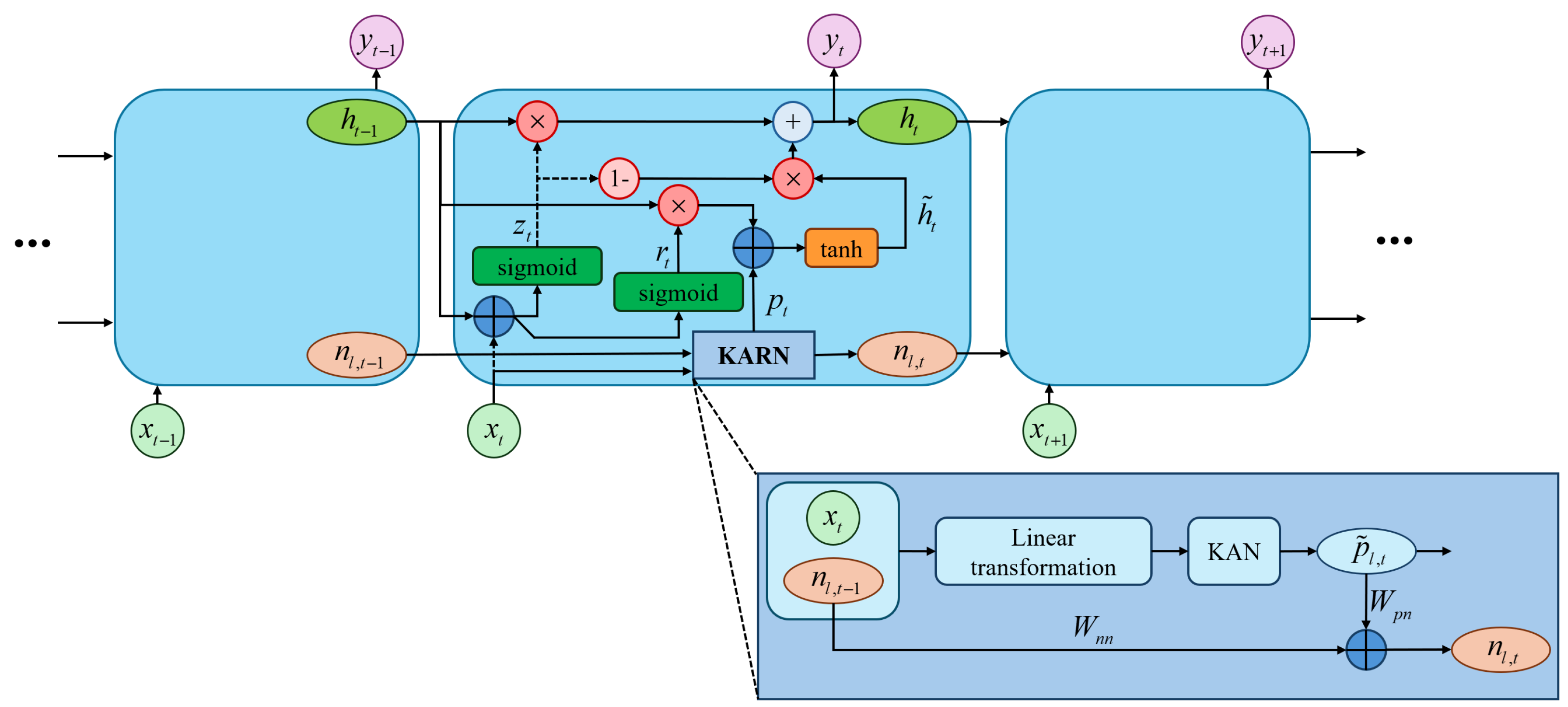
2.2. Kolmogorov–Arnold Gated Recurrent Networks
2.3. Unsteady Aerodynamic and Aeroelasticity Modeling
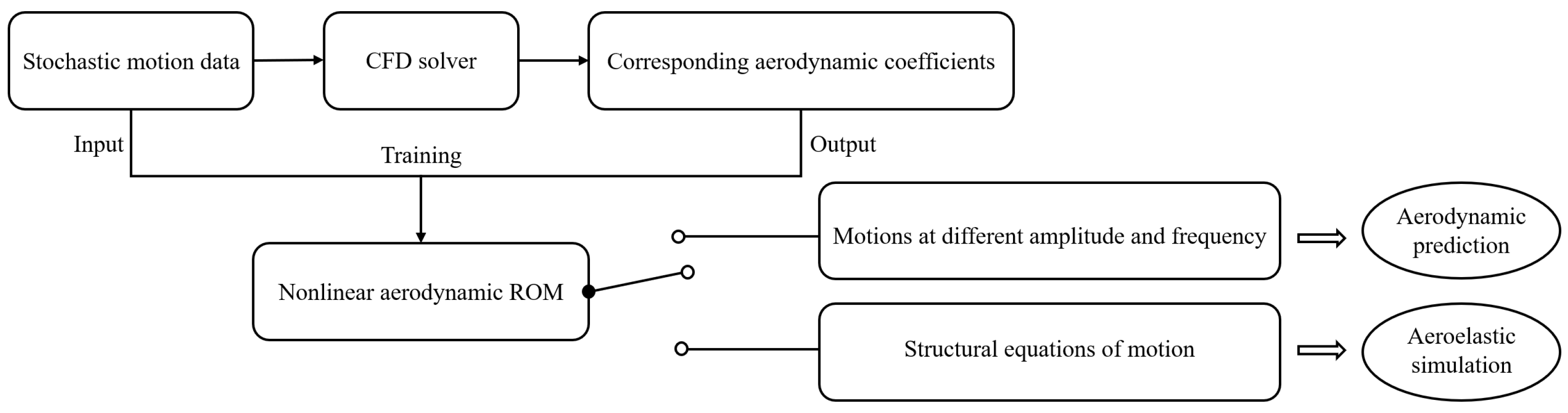
- Aerodynamic prediction: Given the prescribed structural motions as input, the trained ROM predicts the corresponding nonlinear and unsteady aerodynamic coefficients.
- Aeroelastic simulation: Given the nonlinear aerodynamic ROM and the structural equations of motion, a loosely coupled aeroelastic simulation strategy is employed. Specifically, at each time step, the trained ROM predicts the aerodynamic coefficients, which are then used to update the structural response through the structural equations of motion before advancing to the next time step.
3. Numerical Method
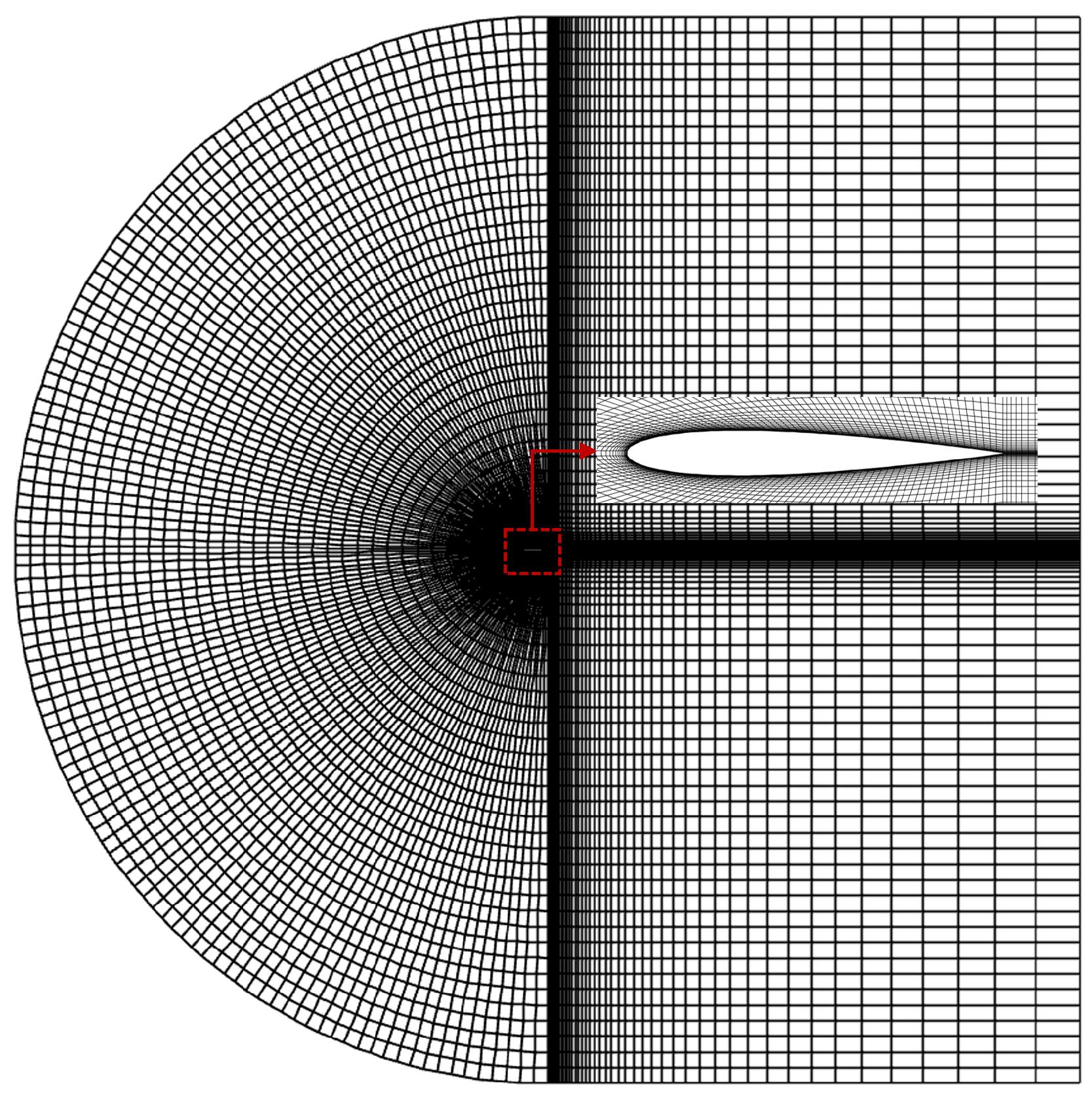
3.1. CFD Solver
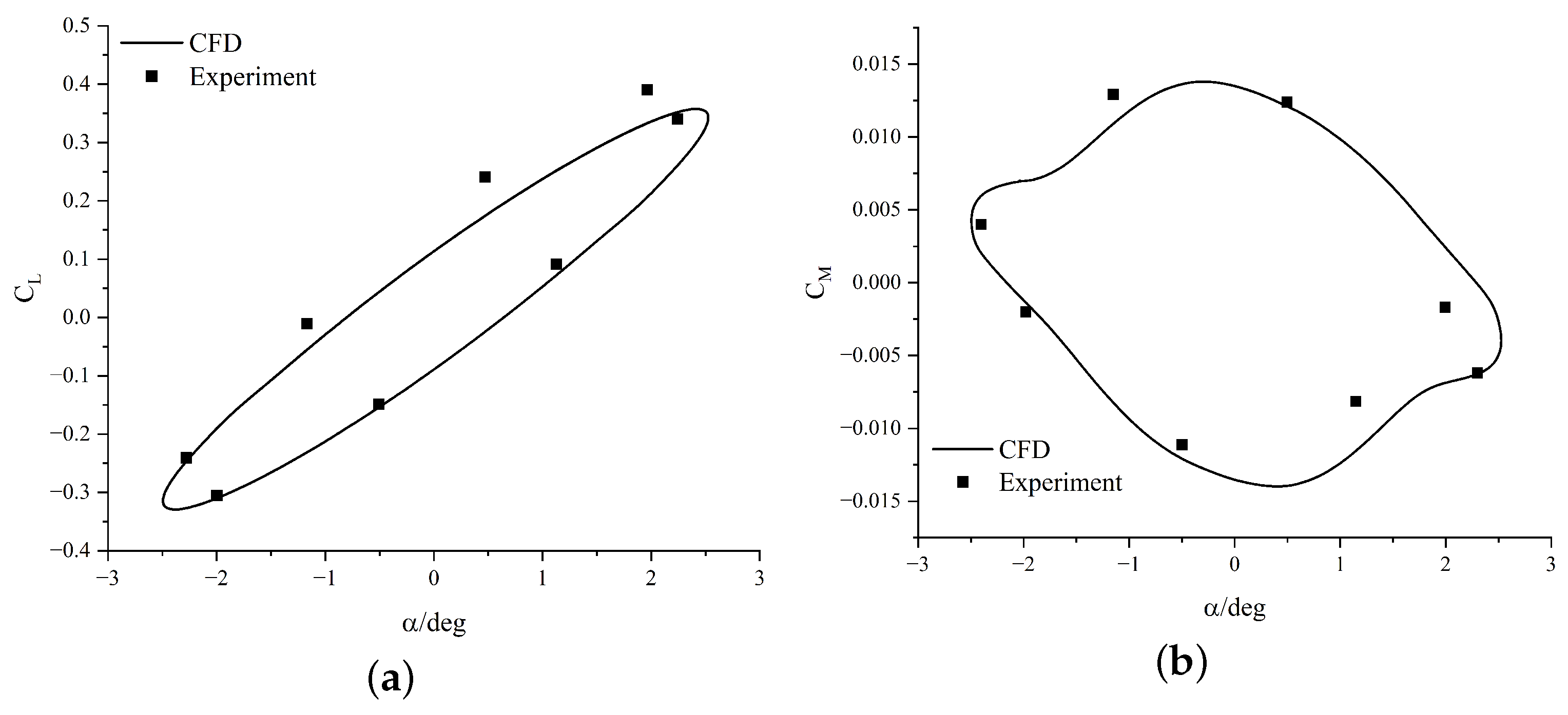
3.2. Method Validation
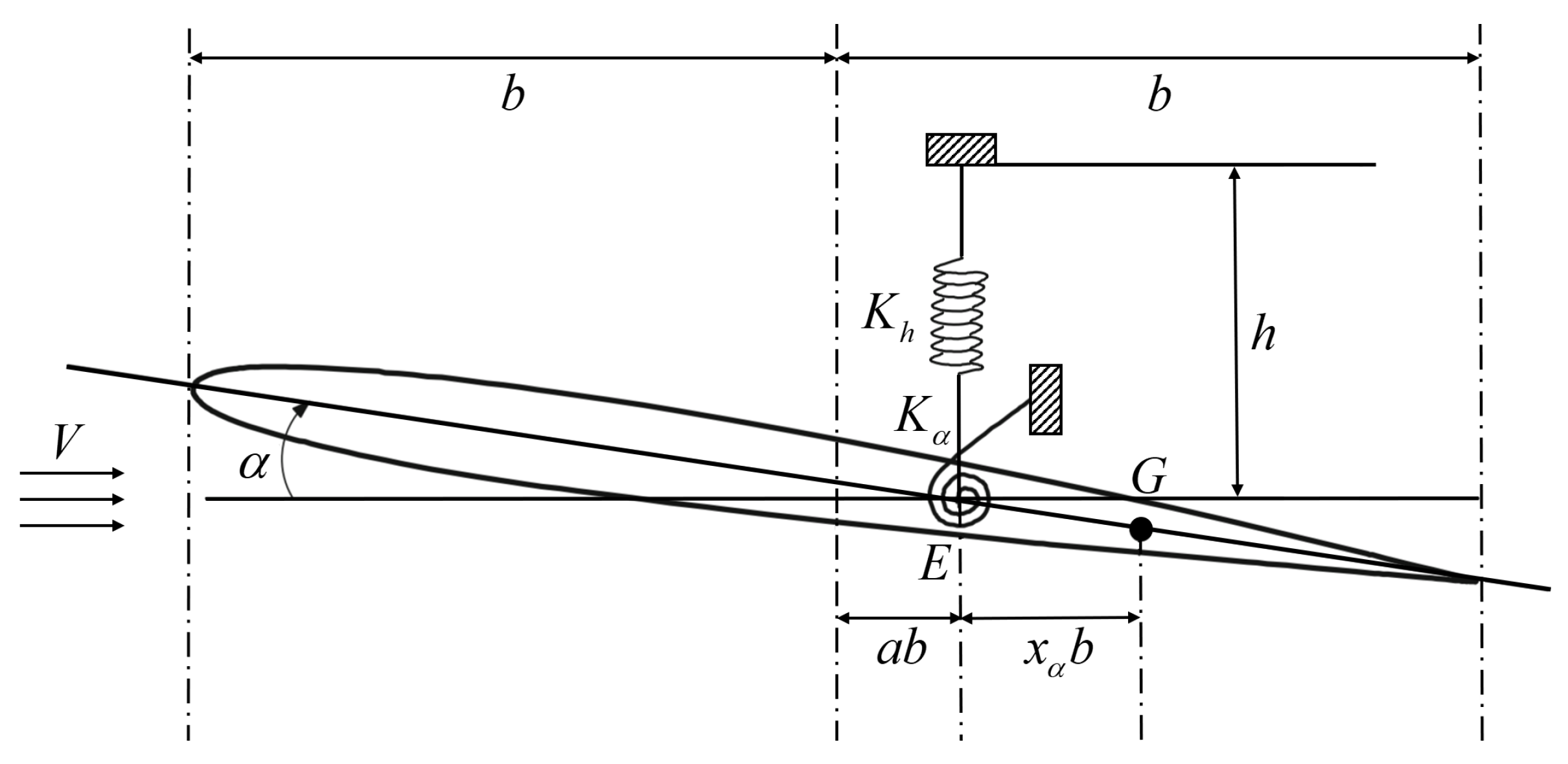
3.3. Structural Equations of Motion
4. Results and Discussion
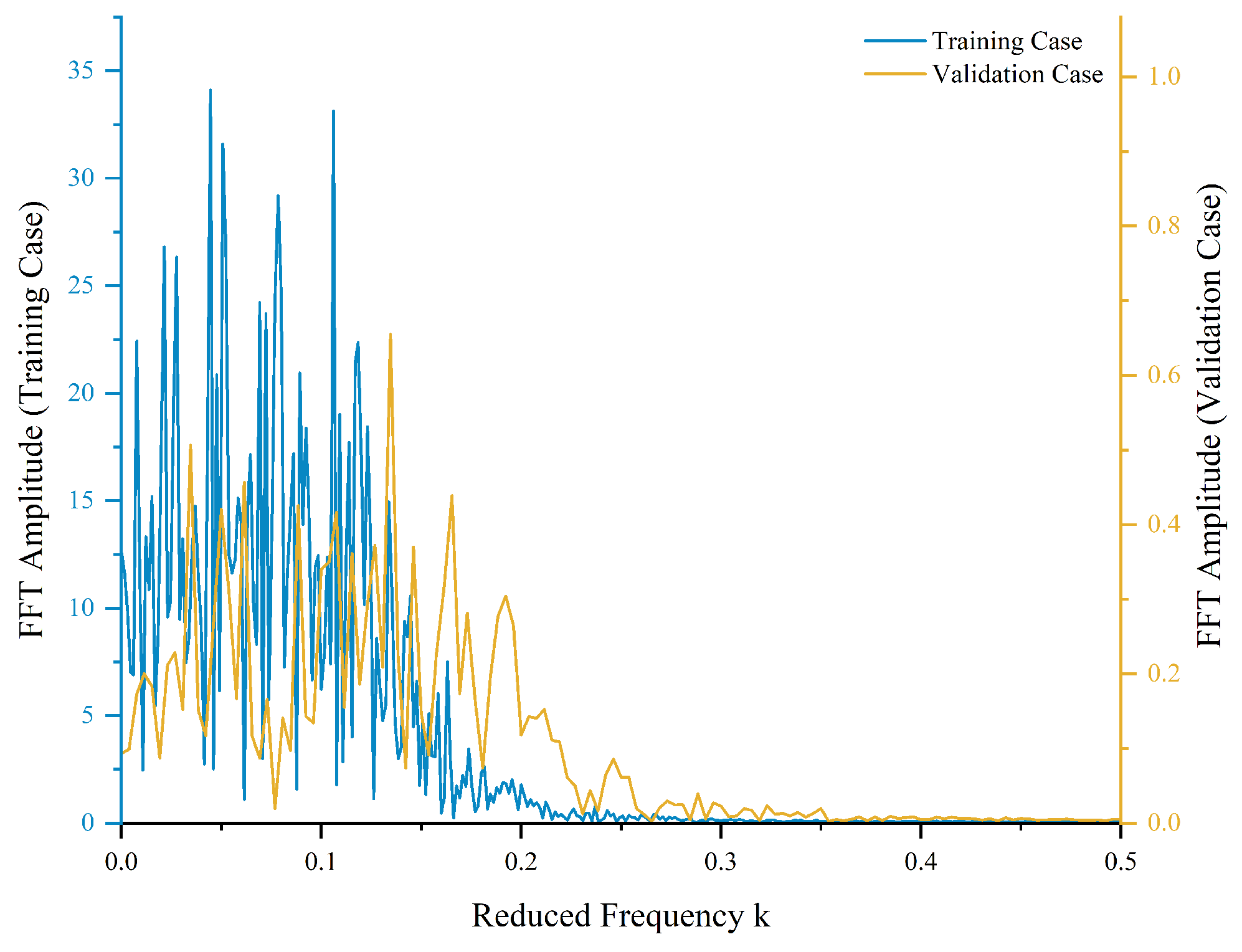
4.1. Training of Reduced-Order Model
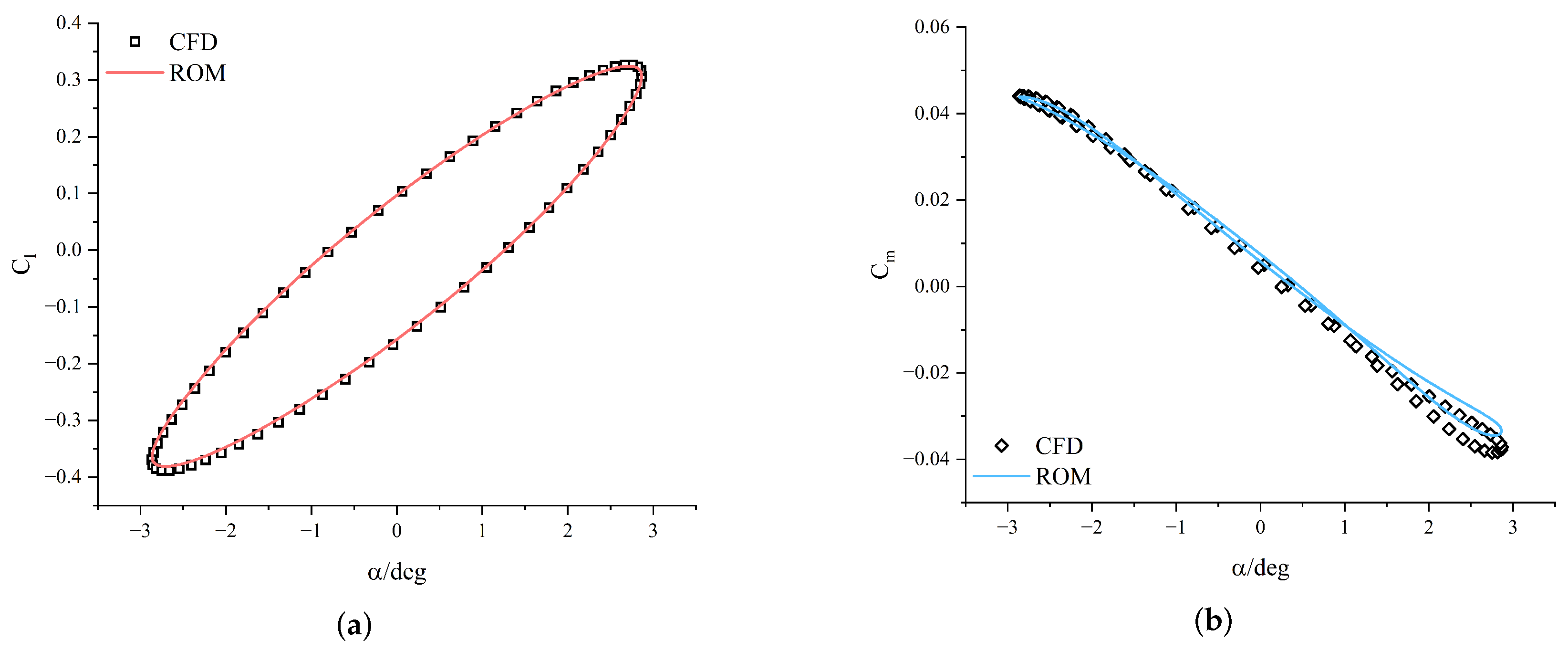
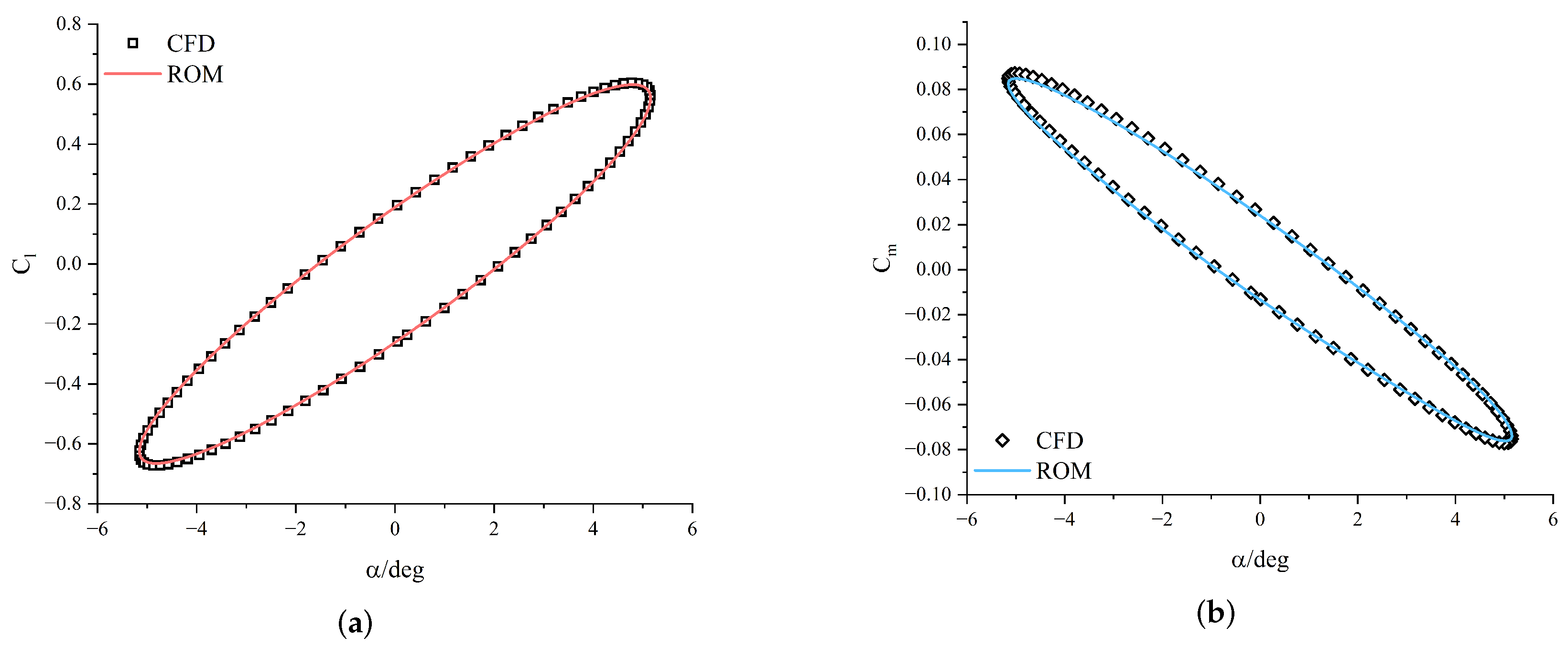
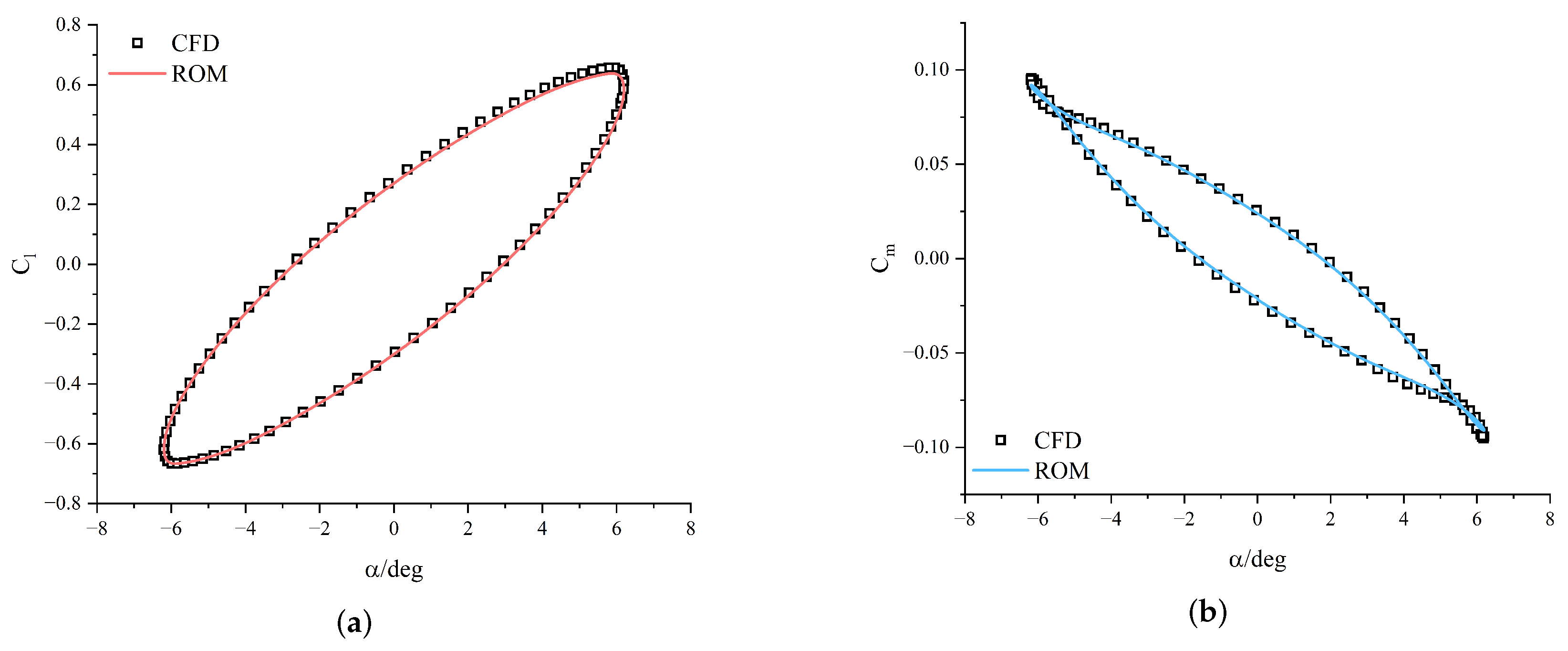
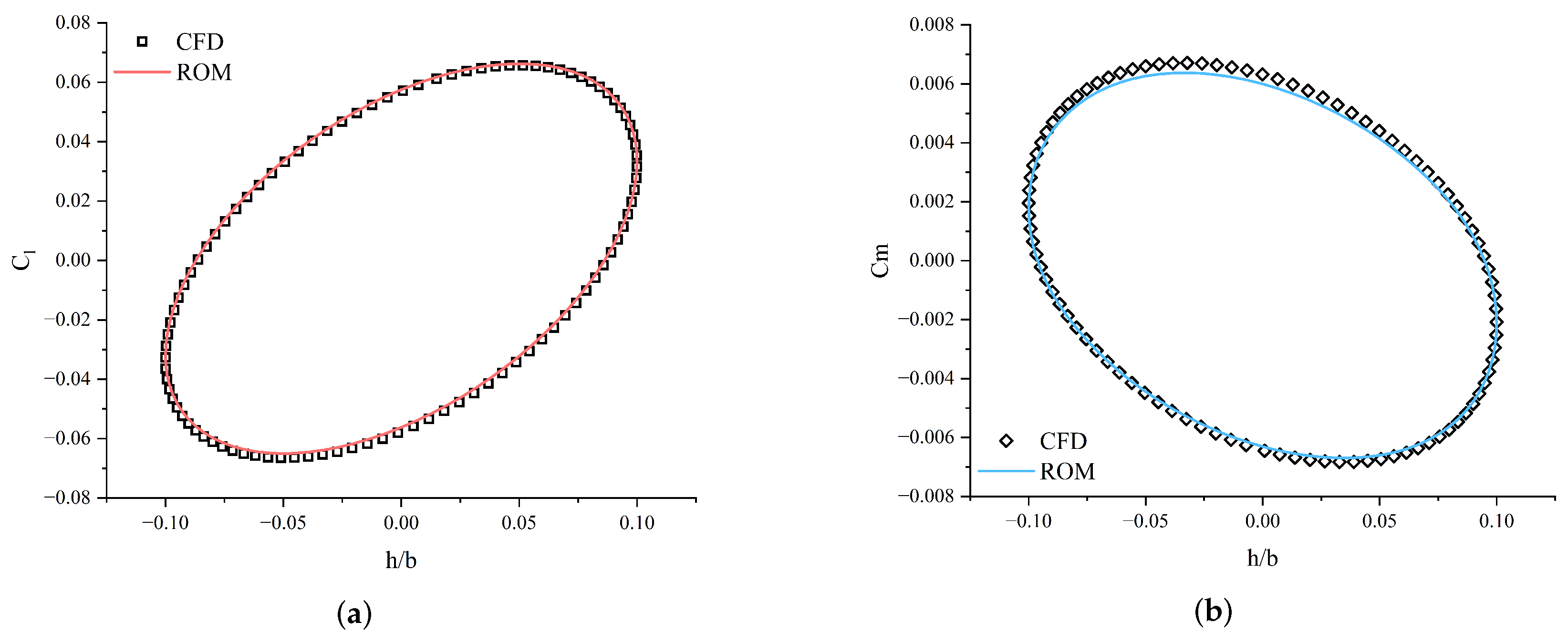
4.2. Prediction of Unsteady Aerodynamics
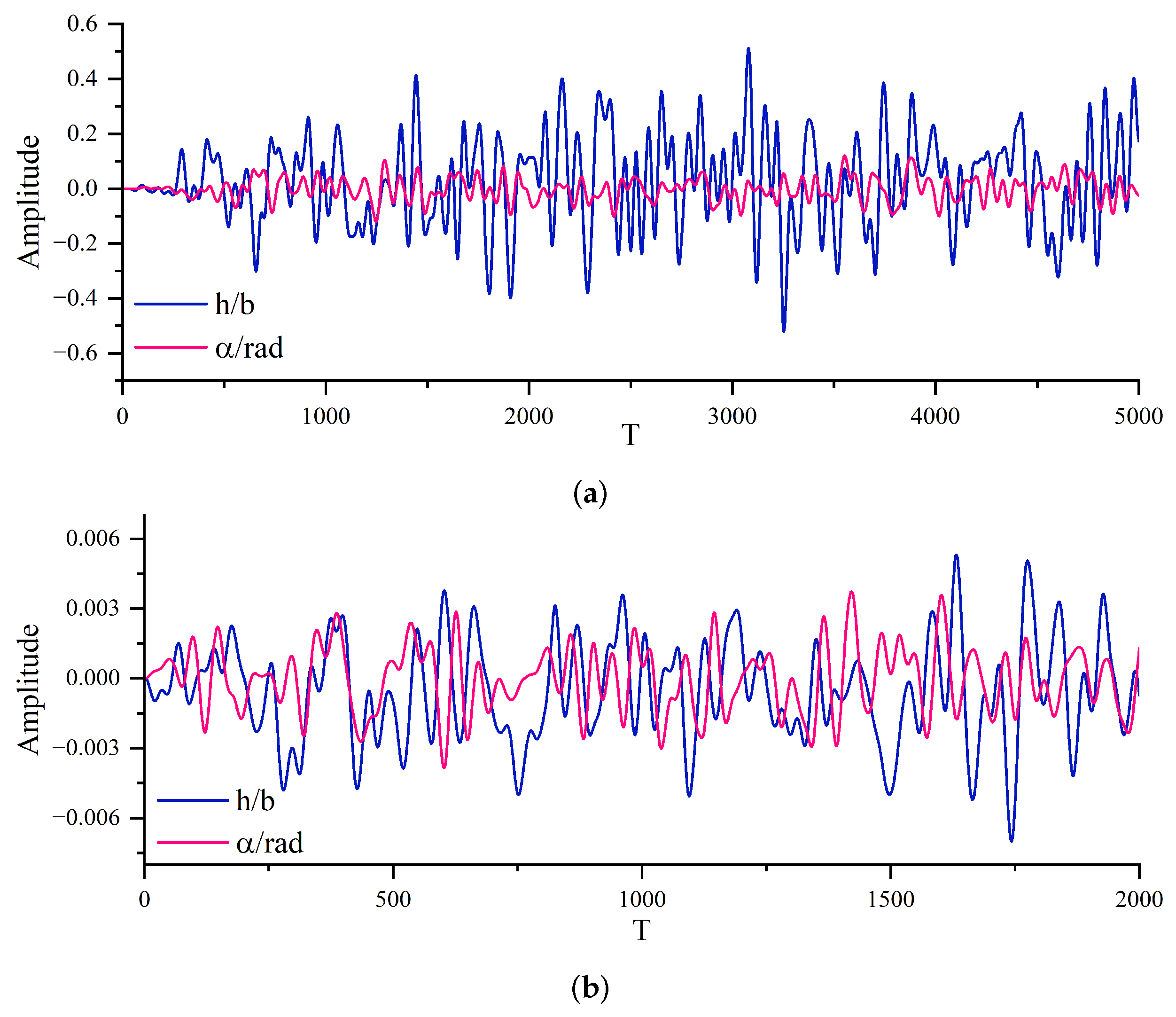
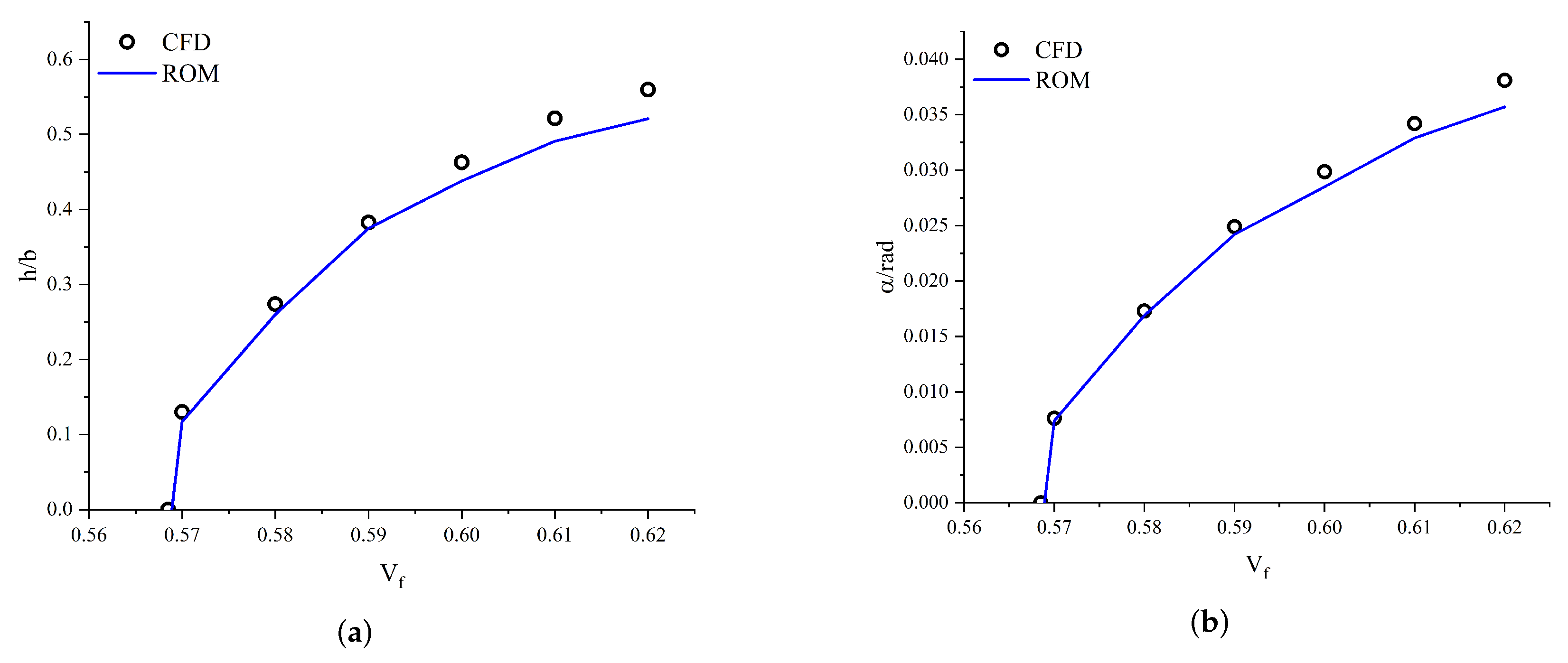
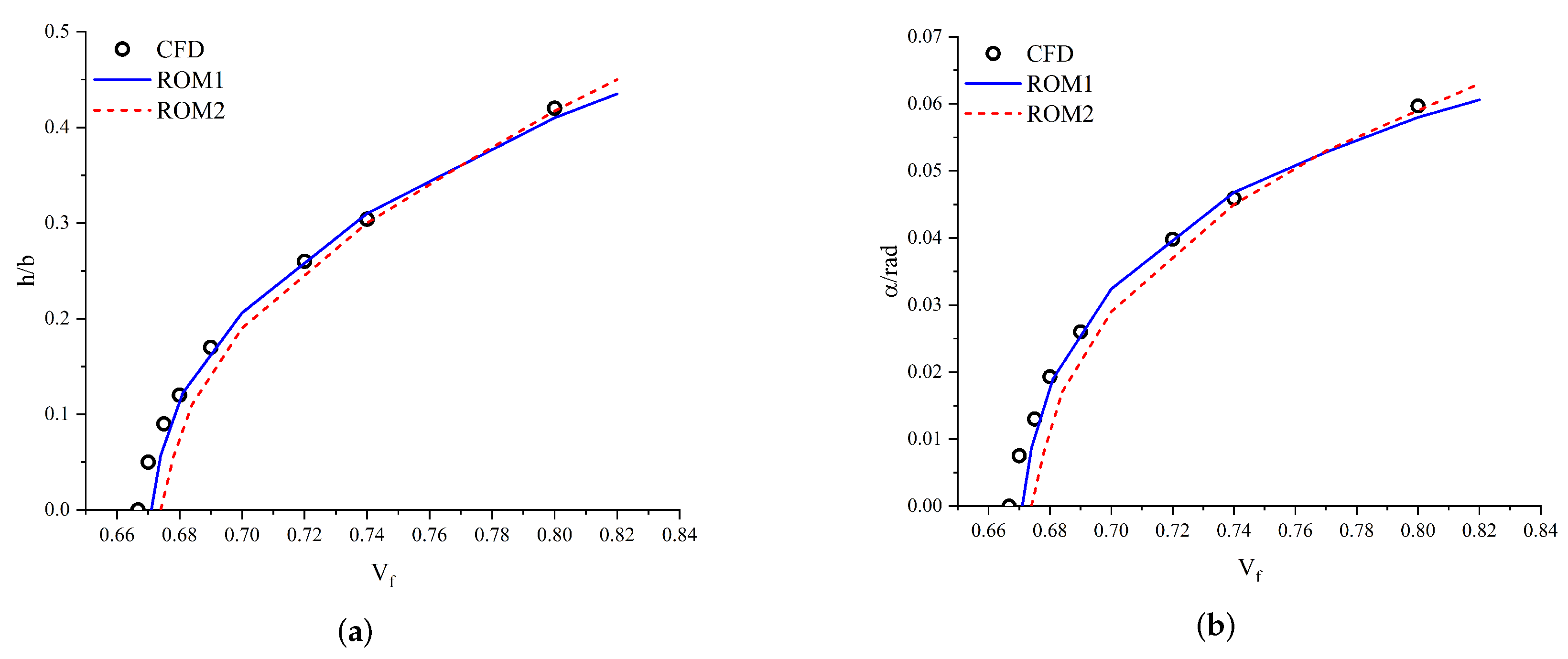
4.3. Prediction of Limit Cycle Oscillations
4.4. Comparison of Time Cost and Model Performance
5. Conclusions
- (1)
- The ROM can accurately predict nonlinear unsteady aerodynamic coefficients under different amplitudes and reduced frequencies.
- (2)
- The ROM can accurately predict the limit cycle oscillation responses and trends under different flutter speeds.
- (3)
- The computational efficiency significantly improved compared to direct CFD computations, and the ROM exhibited better generalization than the previous model. These advantages underscore its potential to reduce computational costs while maintaining high fidelity, making it a promising approach for aerodynamic and aeroelastic analysis.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhou, Q.; Li, D.F.; Da Ronch, A.; Chen, G.; Li, Y.M. Computational fluid dynamics-based transonic flutter suppression with control delay. J. Fluids Struct. 2016, 66, 183–206. [Google Scholar] [CrossRef]
- Chen, P.C.; Zhang, Z.; Livne, E. Design-oriented computational fluid dynamics-based unsteady aerodynamics for flight-vehicle aeroelastic shape optimization. AIAA J. 2015, 53, 3603–3619. [Google Scholar] [CrossRef]
- Farhat, C.; Lesoinne, M. Two efficient staggered algorithms for the serial and parallel solution of three-dimensional nonlinear transient aeroelastic problems. Comput. Methods Appl. Mech. Eng. 2000, 182, 499–515. [Google Scholar] [CrossRef]
- Bendiksen, O.O. Transonic limit cycle flutter of high-aspect-ratio swept wings. J. Aircr. 2008, 45, 1522–1533. [Google Scholar] [CrossRef]
- Wei, L.; Zheng, G.; Nie, X.; Lv, J.; Huang, C.; Lu, W.; Zhang, Y.; Yang, G. Robustness and Efficiency of Encapsulated Selective Frequency Damping Using Different Operator-Splitting Schemes: Application to Laminar Cylinder Flow and Transonic Buffet. J. Comput. Phys. 2025, 532, 113968. [Google Scholar] [CrossRef]
- Dean, J.; Morton, S.; McDaniel, D.; Clifton, J.; Bodkin, D. Aircraft stability and control characteristics determined by system identification of CFD simulations. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008; p. 6378. [Google Scholar]
- Ghoreyshi, M.; Jirásek, A.; Cummings, R.M. Reduced order unsteady aerodynamic modeling for stability and control analysis using computational fluid dynamics. Prog. Aerosp. Sci. 2014, 71, 167–217. [Google Scholar] [CrossRef]
- Zhang, W.; Ye, Z. Reduced-order-model-based flutter analysis at high angle of attack. J. Aircr. 2007, 44, 2086–2089. [Google Scholar] [CrossRef]
- Cowan, T.J.; Arena, A.S., Jr.; Gupta, K.K. Accelerating computational fluid dynamics based aeroelastic predictions using system identification. J. Aircr. 2001, 38, 81–87. [Google Scholar] [CrossRef]
- Roy, A.; Mukherjee, R. Time Series Behaviour of Laminar Separation Bubbles at Low Reynolds Number. In Proceedings of the AIAA Scitech 2021 Forum, Virtual, 11–15, 19–21 January 2021; p. 1197. [Google Scholar]
- Huang, R.; Hu, H.; Zhao, Y. Nonlinear reduced-order modeling for multiple-input/multiple-output aerodynamic systems. AIAA J. 2014, 52, 1219–1231. [Google Scholar] [CrossRef]
- Cheng, C.M.; Peng, Z.K.; Zhang, W.M.; Meng, G. Volterra-series-based nonlinear system modeling and its engineering applications: A state-of-the-art review. Mech. Syst. Signal Process. 2017, 87, 340–364. [Google Scholar] [CrossRef]
- Lee, B.H.K. Oscillatory shock motion caused by transonic shock boundary-layer interaction. AIAA J. 1990, 28, 942–944. [Google Scholar] [CrossRef]
- Lee, B.H.K. Self-sustained shock oscillations on airfoils at transonic speeds. Prog. Aerosp. Sci. 2001, 37, 147–196. [Google Scholar] [CrossRef]
- Hermes, V.; Klioutchnikov, I.; Olivier, H. Numerical investigation of unsteady wave phenomena for transonic airfoil flow. Aerosp. Sci. Technol. 2013, 25, 224–233. [Google Scholar] [CrossRef]
- Brunton, S.L.; Noack, B.R.; Koumoutsakos, P. Machine learning for fluid mechanics. Annu. Rev. Fluid Mech. 2020, 52, 477–508. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, F.; Zhao, S.; Tang, Y. A novel framework for predicting active flow control by combining deep reinforcement learning and masked deep neural network. Phys. Fluids 2024, 36, 037112. [Google Scholar] [CrossRef]
- Kou, J.; Zhang, W. Data-driven modeling for unsteady aerodynamics and aeroelasticity. Prog. Aerosp. Sci. 2021, 125, 100725. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, B.; Ye, Z.; Quan, J. Efficient method for limit cycle flutter analysis based on nonlinear aerodynamic reduced-order models. AIAA J. 2012, 50, 1019–1028. [Google Scholar] [CrossRef]
- Zhang, W.; Kou, J.; Wang, Z. Nonlinear aerodynamic reduced-order model for limit-cycle oscillation and flutter. AIAA J. 2016, 54, 3304–3311. [Google Scholar] [CrossRef]
- Winter, M.; Breitsamter, C. Neurofuzzy-model-based unsteady aerodynamic computations across varying freestream conditions. AIAA J. 2016, 54, 2705–2720. [Google Scholar] [CrossRef]
- Winter, M.; Breitsamter, C. Nonlinear identification via connected neural networks for unsteady aerodynamic analysis. Aerosp. Sci. Technol. 2018, 77, 802–818. [Google Scholar] [CrossRef]
- Qi, H.; Yu, J.; Jiang, J.; Guo, J. Linear and nonlinear combined aerodynamic reduced order model based on residual network framework. Europhys. Lett. 2022, 138, 63002. [Google Scholar] [CrossRef]
- Li, K.; Kou, J.; Zhang, W. Deep neural network for unsteady aerodynamic and aeroelastic modeling across multiple Mach numbers. Nonlinear Dyn. 2019, 96, 2157–2177. [Google Scholar] [CrossRef]
- Dai, Y.; Rong, H.; Wu, Y.; Yang, C.; Xu, Y. Stall flutter prediction based on multi-layer GRU neural network. Chin. J. Aeronaut. 2023, 36, 75–90. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, Y.; Vaidya, S.; Ruehle, F.; Halverson, J.; Soljačić, M.; Hou, T.; Tegmark, M. Kan: Kolmogorov-arnold networks. arXiv 2024, arXiv:2404.19756. [Google Scholar]
- Liu, Z.; Ma, P.; Wang, Y.; Matusik, W.; Tegmark, M. Kan 2.0: Kolmogorov-arnold networks meet science. arXiv 2024, arXiv:2408.10205. [Google Scholar]
- Ji, T.; Hou, Y.; Zhang, D. A comprehensive survey on Kolmogorov Arnold networks (KAN). arXiv 2024, arXiv:2407.11075. [Google Scholar]
- Polo-Molina, A.; Alfaya, D.; Portela, J. MonoKAN: Certified Monotonic Kolmogorov-Arnold Network. arXiv 2024, arXiv:2409.11078. [Google Scholar]
- Koenig, B.C.; Kim, S.; Deng, S. KAN-ODEs: Kolmogorov–Arnold network ordinary differential equations for learning dynamical systems and hidden physics. Comput. Methods Appl. Mech. Eng. 2024, 432, 117397. [Google Scholar] [CrossRef]
- Aghaei, A.A. KANtrol: A Physics-Informed Kolmogorov-Arnold Network Framework for Solving Multi-Dimensional and Fractional Optimal Control Problems. arXiv 2024, arXiv:2409.06649. [Google Scholar]
- Genet, R.; Inzirillo, H. Tkan: Temporal kolmogorov-arnold networks. arXiv 2024, arXiv:2405.07344. [Google Scholar] [CrossRef]
- Xu, K.; Chen, L.; Wang, S. Kolmogorov-arnold networks for time series: Bridging predictive power and interpretability. arXiv 2024, arXiv:2406.02496. [Google Scholar]
- Zhou, Q.; Pei, C.; Sun, F.; Han, J.; Gao, Z.; Pei, D.; Zhang, H.; Xie, G.; Li, J. KAN-AD: Time series anomaly detection with Kolmogorov-Arnold networks. arXiv 2024, arXiv:2411.00278. [Google Scholar]
- Tan, Y. Numerical Analysis and Suppression of Transonic Airfoil Flutter. Master’s Thesis, University of Chinese Academy of Sciences, Beijing, China, 2023. [Google Scholar]
- Landon, R.H. NACA 0012 oscillatory and transient pitching. AGARD Rep. 1982, 702, 45–59. [Google Scholar]
- Isogai, K. On the transonic-dip mechanism of flutter of a sweptback wing. AIAA J. 1979, 17, 793–795. [Google Scholar] [CrossRef]
- Hota, H.S.; Handa, R.; Shrivas, A.K. Time series data prediction using sliding window based RBF neural network. Int. J. Comput. Intell. Res. 2017, 13, 1145–1156. [Google Scholar]
- Halder, R.; Damodaran, M.; Khoo, B.C. Deep learning based reduced order model for airfoil-gust and aeroelastic interaction. AIAA J. 2020, 58, 4304–4321. [Google Scholar] [CrossRef]
- Brewick, P.T.; Masri, S.F. An evaluation of data-driven identification strategies for complex nonlinear dynamic systems. Nonlinear Dyn. 2016, 85, 1297–1318. [Google Scholar] [CrossRef]
- Thomas, J.P.; Dowell, E.H.; Hall, K.C. Nonlinear inviscid aerodynamic effects on transonic divergence, flutter, and limit-cycle oscillations. AIAA J. 2002, 40, 638–646. [Google Scholar] [CrossRef]
- Rivera, J., Jr.; Dansberry, B.; Bennett, R.; Durham, M.; Silva, A.W. NACA 0012 benchmark model experimental flutter results with unsteady pressure distributions. In Proceedings of the 33rd Structures, Structural Dynamics and Materials Conference, Dallas, TX, USA, 13–15 April 1992; p. 2396. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | k | ||||
|---|---|---|---|---|---|
| Pitching motion | |||||
| 1 | 2.865° | 0 | 0.124 | 1.59% | 6.13% |
| 2 | 5.517° | 0 | 0.089 | 0.94% | 2.25% |
| 3 | 6.198° | 0 | 0.161 | 2.60% | 4.64% |
| Plunging motion | |||||
| 4 | 0° | 0.1 | 0.081 | 2.26% | 4.02% |
| 5 | 0° | 0.34 | 0.182 | 1.98% | 8.15% |
| 6 | 0° | 0.42 | 0.154 | 1.54% | 5.62% |
| k | Relative Error (ROM1/ROM2) | |||
|---|---|---|---|---|
| Pitching motion | ||||
| 4.021° | 0 | 0.058 | 1.89%/1.94% | 3.96%/4.88% |
| 5.157° | 0 | 0.119 | 1.31%/2.21% | 4.02%/5.15% |
| 5.749° | 0 | 0.091 | 1.64%/2.55% | 7.15%/6.17% |
| Plunging motion | ||||
| 0° | 0.09 | 0.166 | 1.75%/1.60% | 4.24%/5.75% |
| 0° | 0.15 | 0.063 | 0.92%/2.79% | 3.96%/6.82% |
| 0° | 0.21 | 0.107 | 2.01%/1.77% | 6.51%/4.64% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Tang, H.; Wei, L.; Zheng, G.; Yang, G. Kolmogorov–Arnold Networks for Reduced-Order Modeling in Unsteady Aerodynamics and Aeroelasticity. Appl. Sci. 2025, 15, 5820. https://doi.org/10.3390/app15115820
Zhang Y, Tang H, Wei L, Zheng G, Yang G. Kolmogorov–Arnold Networks for Reduced-Order Modeling in Unsteady Aerodynamics and Aeroelasticity. Applied Sciences. 2025; 15(11):5820. https://doi.org/10.3390/app15115820
Chicago/Turabian StyleZhang, Yuchen, Han Tang, Lianyi Wei, Guannan Zheng, and Guowei Yang. 2025. "Kolmogorov–Arnold Networks for Reduced-Order Modeling in Unsteady Aerodynamics and Aeroelasticity" Applied Sciences 15, no. 11: 5820. https://doi.org/10.3390/app15115820
APA StyleZhang, Y., Tang, H., Wei, L., Zheng, G., & Yang, G. (2025). Kolmogorov–Arnold Networks for Reduced-Order Modeling in Unsteady Aerodynamics and Aeroelasticity. Applied Sciences, 15(11), 5820. https://doi.org/10.3390/app15115820