1. Introduction
The human brain, complex as it is as a result of unplanned evolution, stores memories in a rather disorganized way compared to the precise addressing system of computers [
1,
2]. It is organized according to context, and topics are interwoven in complex associative networks and are retrieved by clues and associations, not by pure addressing in a memory as with a computer. Human memory is superior to that of computers in certain respects, for example, through automatic prioritization with regard to rewards and frequently used elements [
3,
4]. However, memories that are unused soon decay into oblivion. Furthermore, unlike the addressing system of a computer, which is the result of planned engineering following the von Neumann architecture, the human way of thinking is susceptible to the formation of false recollections through incorrect associations.
However, perhaps the Cartesian mind–body dualism, which ignores the importance of brain-inspired embodiment for the development of human-like Artificial Cognition (ACo), leads to a dead end [
5]. Personal experiences, partly mediated by social interaction and accessible to recollection, are essential for an Artificial Intelligence (AI) agent to develop cognitive abilities and learn about its environment. Such an agent should be able to imagine actions using mental representations before executing them and justify them using the cognitive ability of prospection, including planning, predicting, imagining scenarios, and possible future events. A cognitive architecture seems to be crucial in equipping the agent with such capabilities. In this work, we ask the question whether a social robot can be endowed with human-like memory capabilities by using a cognitive architecture for information retrieval and processing and a Large Language Model (LLM) that is also capable of vision. A key criterion here is the ability to retrieve recollections from memory using associated expressions and to prepare the ground for further human-like cognitive abilities. We show a technical method for implementation.
LLMs like ChatGPT amaze the world with their seemingly human-like abilities in some respects. They provide advanced reasoning capabilities, blending intuitive and deliberate cognitive processes [
6]. With their sophisticated probabilistic model of language use to generate a semantically consistent text, they require a form of effective memory that has surprising similarities with central features of human memory [
7]. LLMs also help robotic systems improve their generalization capabilities in dynamic and complex real-world environments and can significantly increase their behavior planning and execution capabilities, enabling robots to engage with their environment in a human-like manner [
8].
Vision-Language Models (VLMs) are multimodal AI systems created by combining an LLM with a vision encoder that gives the LLM the ability to “see”. They provide assistance with complex tasks such as creating captions and answering visual questions [
9]. VLMs are capable of performing a variety of tasks after learning relationships between images and language from large data sets, such as answering questions about images, finding sentences that correspond well with images, and finding image regions that correspond to texts. These skills can be used in many ways for robotics, for example, for robot movements, state recognition, object recognition, affordance recognition, relation recognition, and anomaly detection [
10,
11].
Cognitive architectures, on the other hand, refer both to a theory about the structure of the human mind and to a computer-based implementation of such a theory. They are particularly suitable for general problem solving in areas that are not clearly defined and for human cognitive modeling [
12]. Cognitive architectures attempt to describe and integrate the basic mechanisms of human cognition. In doing so, they rely on empirically supported assumptions from cognitive psychology. Their formalized models can be used to react flexibly to actions in a human-like manner and—when used in a robot—to develop a situational understanding regarding human behavior for adequate reactions. We apply the well-known and successfully implemented cognitive architecture Adaptive Control of Thought-Rational (ACT-R) for our test scenarios [
13]. ACT-R is a hybrid cognitive architecture with a symbolic and sub-symbolic structure. It is based on psychological principles and offers a comprehensive model of cognitive processing. ACT-R models run in real time and are robust to errors or unexpected events.
Intuitive decision making as a subjective, particularly a human type of decision making, is based on implicit knowledge that is transmitted to the conscious mind at the time of the decision through affect or unconscious cognition. Computational models of intuitive decision making can be expressed as instance-based learning using the ACT-R cognitive architecture [
14]. In Instance-Based Learning Theory (IBLT), past experiences (i.e., instances) are retrieved using cognitive mechanisms of a cognitive architecture. IBLT proposes learning mechanisms related to a decision-making process, such as instance-based knowledge and recognition-based retrieval. These learning mechanisms can be implemented in an ACT-R model [
15,
16]. A social robot would benefit from such abilities, for example, to solve problems or develop a kind of intuition for the situation. With regard to Human–Robot Interaction (HRI), a combination of robot sensor technology and data processing with such an architecture offers the possibility of dealing with information from the robot’s real world in cognitive models. A cognitive architecture may also be used to add a “human component” to robotic applications, as the procedural processes of a mental model behave differently—more human-like—than conventional algorithms [
17].
In HRI applications that use an LLM for speech generation and/or a VLM for image content recognition, a cognitive model can use its memory to provide facts and the context of a particular scenario to the language model, bringing in personalized experiences by recalling unique memories collected by the robot. With the help of prompt augmentation, conclusions of a mental model can be taken into account in instruction generation via prompts for the LLM and thus reduce the weaknesses of the language model, such as ignorance of the current individual facts, and thus, hallucination when relevant facts are unclear. Furthermore, language models are good at fast automatic reasoning, but less capable of high-level cognition to enable complex mental operations and “slow thinking” following the dual process theory of human cognition [
18]. A combination of the advantages of both approaches would result in a system that performs involuntary reactions as automatic tasks (e.g., formulating a sentence) and also incorporates and takes into account more complex human-like cognitive abilities such as memory. This would open up the possibility of significantly increasing the capabilities of a social robot in terms of incorporating and assessing human actions and intentions.
The cognitive architecture of ACT-R comprises a declarative and a procedural memory, whereby the declarative memory supports lexical knowledge by encoding, storing, and retrieving semantic knowledge, as in humans, while the procedural memory enables the learning of habits and skills [
19,
20,
21,
22]. Using the ACT-R chunk and memory system to store, retrieve, and process facts and impressions of a real-world scenario and utilizing knowledge from the procedural memory of the cognitive model allows an LLM to incorporate these facts into utterances, paving the way for a more reliable, evidence-based, and human-like application of LLMs.
For testing our approach, we applied OpenAI’s Generative Pretrained Transformer (GPT) language model in a setting with a social robot in dialog with a human, where the robot used the GPT model to generate speech, processed the content of the dialog, and recognized image content from its front camera [
23]. However, the proposed methods can also be used beyond a HRI context. As a cognitive architecture, we used the standalone application of ACT-R 7, for which we created a cognitive model in LISP [
24]. The connection between the cognitive model and our robot application, which also contained the Application Programming Interface (API) to the LLM, was realized via a TCP/IP connection of the dispatcher, which acts as a server for client applications to ACT-R [
25].
To incorporate different sensory abilities from the robot, we used the visual capabilities of the GPT model in one test method and text generation in another. In principle, the procedure remained the same with regard to the use of the cognitive model and its memory function, except that the LLM was used once to describe image content and once to describe textual content. In the vision method, the language model was instructed to analyze the content of images from the front camera on the robot’s head and describe the main content of each image in three keywords or key phrases. In the other case, the utterances of a person in dialog with the robot were processed by an LLM so that the core content of the human question or problem was also expressed in three keywords. The number of keywords used for our experiments was arbitrarily set to three in order to ensure a certain variability for the association possibilities via the keywords, and at the same time, to keep the number of required productions of the cognitive model manageable. The principle outlined here is not dependent on the number of keywords.
These keywords or phrases were passed as chunks to an ACT-R cognitive model, where they were processed with productions from procedural memory to search the declarative memory for existing memory content indexed by chunks in the same or similar form. The memory content contained an additional chunk that represented the actual recollection and could, for example, represent a fact worth remembering in the form of a short sentence. If there was a positive correlation between keyword chunks from the LLM and memory chunks, this recollection was passed to the robot application and thus to the LLM for prompt augmentation, which generated a response based on this knowledge. In principle, it is possible to accumulate factual knowledge a priori by creating corresponding chunks in declarative memory. In the following, we show a technical implementation of such an architecture as a combination of LLM/VLM integration, a humanoid social robot, and cognitive architecture and give examples of applications.
2. Related Work
Robots are able to use Large Multimodal Models (LMMs) to comprehend and execute tasks based on natural language input and environmental cues [
26]. The integration of foundation models such as LLMs and VLMs can effectively improve robot intelligence [
8,
27]. VLMs help, for example, equip robots with the ability for physically based task planning [
28]. The use of GPT-4V for analyzing videos of humans performing tasks to obtain textual explanations of environmental and action details, combined with a GPT-4-based task planner that encodes these details into a symbolic task plan for a robot, was presented by Wake et al. [
29].
Yoshida et al. investigated possibilities for the development of a “minimal self” with a sense of agency and ownership in a robot that was able to mimic human movements and emotions by using human knowledge from language models [
30]. They did not implement a model of a cognitive architecture but used GPT-4’s motion generation and image recognition capabilities. VLMs as a basis for metacognitive thinking can enable robots to understand and improve their own processes, avoid hardware failures, and thus increase their resilience [
31].
Given the recent successes of language models, there has been an increased interest in the interplay between LLMs and cognitive architectures. Ideas for a combination of both are emerging, or the creation of a cognitive architecture based on an LLM is being considered. Niu et al. provided an overview of the similarities, differences, and challenges between LLMs and cognitive science by analyzing methods for assessing the potential cognitive capabilities of LLMs, discussing biases and limitations, and an integration of LLM with cognitive architectures [
32]. In the novel neuro-symbolic architecture presented by Wu et al., human-centered decision making was enabled through the integration of ACT-R with LLMs by using knowledge from the decision process of the cognitive model as neural representations in trainable layers of the LLM [
33]. This improved the ability for grounded decision making. Gonzáles-Santamarta et al. provided an example of integrating an LLM with a cognitive architecture to enable planning and reasoning in autonomous robots [
34]. They showed how to use the reasoning capabilities of LLMs in the MERLIN2 cognitive architecture integrated in ROS 2.
Berto et al. investigated how humans and cognitive robots with different value systems and motivations understand each other’s needs in free interactions [
35]. For this purpose, a cognitive architecture was developed that combines perception with internal motivation and an intrinsic value system for determining actions. They defined an autonomous cognitive agent as an agent that is able to autonomously predict the outcome of its actions by drawing on past memories, current perceptions of the environment and other agents, and anticipation of the behavior of both the environment and its own actions.
The development of robots that can help people with their everyday tasks is inspired by many fields, with a particular focus on psychological studies such as Theory of Mind (ToM), a cognitive ability that humans develop in childhood to infer their own mental states and the mental states of other people such as beliefs, desires, knowledge, feelings, and intentions. In their review of ToM for autonomous systems such as robots, Hellou et al. explored the use of probabilistic models using Bayesian inference, mentioning the need to combine such models with data-driven models including Deep Learning (DL) and Reinforcement Learning (RL) due to limitations in Bayesian Network (BN) generalization [
36]. However, they also mentioned a lack of data regarding DL for ToM scenarios and data limitations in RL models, the latter of which could be overcome by simulations. Finally, they emphasized the need for further studies on the integration of such cognitive capabilities with machines in real-world scenarios.
In order to relate to people’s mental states, robots must be able to not only recognize them but also remember them in the context of the interactions. The use of a cognitive architecture connected to a social robot to store and process memory chunks from a language game between the robot and a human was demonstrated by Sievers et al. [
37]. An ACT-R model received words from the robot, searched for matching associations already present in memory, and provided feedback to an LLM on these associations when appropriate. This way of grounding abstract words and ideas should help constrain possible meanings.
Knowles et al. proposed a system architecture that combined LLMs and cognitive architectures with an analogy to “fast” and “slow” thinking in human cognition [
18,
38]. Leivada et al. explored whether the current generation of LLMs is able to develop grounded cognition that incorporates prior expectations and prior world experiences to perceive the big picture [
39]. Insights from human cognition and psychology anchored in cognitive architectures could contribute to the development of systems that are more powerful, reliable, and human-like [
40]. This dual-process architecture and the hybrid neuro-symbolic approach to overcoming the limitations of current LLMs is seen as particularly important.
He et al. investigated the Long-Term Memory (LTM) capabilities of AI systems such as LLM-based agents by creating a mapping system between human LTM and AI LTM mechanisms and proposing an extension of current cognitive architectures for the creation of next-generation AI systems with LTM [
41]. The significance of LTM for the foundation of AI self-evolution—allowing LLMs to evolve during inference—based on limited data or interactions versus large-scale training on increasingly large datasets was emphasized by Jiang et al. [
42].
A human-like memory architecture to improve the cognitive abilities of LLM-based dialog agents was proposed by Hou et al. [
43]. The proposed architecture enabled agents to autonomously retrieve recollections required to generate responses, thereby addressing limitations of the temporal awareness of LLMs. Memories from the interaction history with the user were stored in a database containing the content and temporal context of each reminder. This allowed the agent to understand and utilize specific memory content relevant to the user in a temporal context.
In their Cognitive Architectures for Language Agents (CoALA), Sumers et al. proposed a language agent with modular memory components, a structured action space for interacting with internal memory and external environments, and a generalized decision-making process for selecting actions [
44]. Their framework draws from the rich history of symbolic artificial intelligence and cognitive science and combines some longstanding findings with current research on LLMs for tasks that require basic knowledge or reasoning. Furthermore, Retrieval-Augmented Generation (RAG) can offer a different approach to challenges such as hallucinations, outdated knowledge, and untraceable reasoning processes in LLMs [
45,
46]. RAG does not retrieve knowledge from unknown scenarios, but provides an approach to combine external sources in LLMs with many optimizations to incorporate the appropriate knowledge. The use of a cognitive architecture memory capable of associations with recollections of similar situations experienced should be able to react more accurately to comparable new scenarios and control the LLM in a more targeted manner. However, testing this is beyond the scope of this paper.
The production of semantically consistent text requires a form of effective memory, especially in individual scenarios. An examination of the memory properties of LLMs revealed similarities with important features of human memory, but in the case of an LLM, these are learned from the statistics of the training text data and not from the architecture of the LLM [
7]. ACT-R/E was developed for building embodied models of people with robots [
47]. However, apart from that, the use of architectures that are modeled on human cognitive behavior, which like ACT-R are based on cognitive psychological findings and have been tried and tested in the psychological field for many years, is to our knowledge largely unexplored for use in social robots. For a more general, meaningful approach and a more human-like way of retrieving memories from a recollection—which, is also explainable in terms of the accessible memory contents and thus poses no explanatory problems—we propose using the declarative memory of a cognitive architecture in conjunction with the procedural abilities of a cognitive model, as described below.
4. Content Retrieval from the Declarative Memory of ACT-R
We demonstrated the use of the GPT-4o model to retrieve specific recollections from the declarative memory of an ACT-R model using two examples. In the first example, we assumed an utterance of a human in a dialog with a social robot, where eventually the robot is supposed to search ‘its’ (ACT-R) memory for matching recollections based on this utterance. In the second example, the goal was to assign the visual impression of the robot to existing recollections. In both cases, we wanted to retrieve a suitable recollection—if available—and have the LLM use its content through prompt augmentation.
4.1. Example Application 1: Recollection Based on Text
The assumed scenario for this example application was as follows: a humanoid social robot is standing at a train station on one of the tracks and offers its services to travelers looking for information. Understanding the content of human questions—especially in relation to certain scenarios defined via the system prompt—and answering them with the help of an LLM generally works well. However, the LLM probably does not know all the details of the current scenario and has no individual recollection of recent encounters between humans and the robot and therefore has no experience of the particular situation. It is therefore advantageous if such factual knowledge can be provided to the LLM for questions about specific local conditions, for example, so that it can be incorporated into an answer that is otherwise perhaps freely formulated by the language model.
The LLM was instructed via system prompts to understand the basic setting and everything we needed it to output. A special feature of this application was the instruction to first create a summary of the question in the form of three keywords or phrases consisting of a few words, instead of a complete answer, and put them in square brackets for better programmatic handling. These keywords or phrases were passed as chunks to the cognitive model to search for a matching recollection. We stored memory chunks, including the suitable fact phrases for this test application, as a priori knowledge in the declarative memory. For each API call that was used to generate a response to the human and not keywords or phrases, the entire dialog part was transferred to the GPT model without the previously generated keywords or phrases so that the model could ‘remember’ what was previously said in the dialog and refer to it as it progressed. The dialog text returned by the API was forwarded to the robot’s voice and tablet output.
4.1.1. Prompting the LLM
The system prompt for the LLM consisted of explanations of the scenario at hand, in general, and the instruction to output three keywords or short phrases as chunks that adequately represent the essential content of the human’s question, separated by commas in square brackets; for example, for the question ‘Where can I find platform 1?’, corresponding keywords could be [Platform 1, Location, Direction Assistance].
For the scenario, we used a system prompt like ‘You are a robot, your name is Pepper. You offer help and information to travelers in a train station by asking them where they want to go and how you can help’.
In the case that a chunk generation was required, we augmented this system prompt with ‘You do not answer the question, but always create three keywords in square brackets that describe the traveler’s problem’.
Furthermore, in the situation where the ACT-R model could not find any suitable recollection in the declarative memory, the system prompt was augmented with ‘You tell the traveler that you do not know the answer to the current question and do not make up an answer under any circumstances’. This should prevent the language model from inventing a seemingly suitable answer without a factual basis.
4.1.2. Results
If a matching chunk was found in the declarative memory, the fact phrase contained in this chunk was transferred back to the robot application and used to augment the LLM’s system prompt, e.g., with
‘Platform 1 is the neighboring platform right here’, as shown in
Figure 3. This fact phrase was used by GPT-4o to respond with, for example,
‘Platform 1 is right here, neighboring this information desk. You can easily access it by walking straight ahead’.
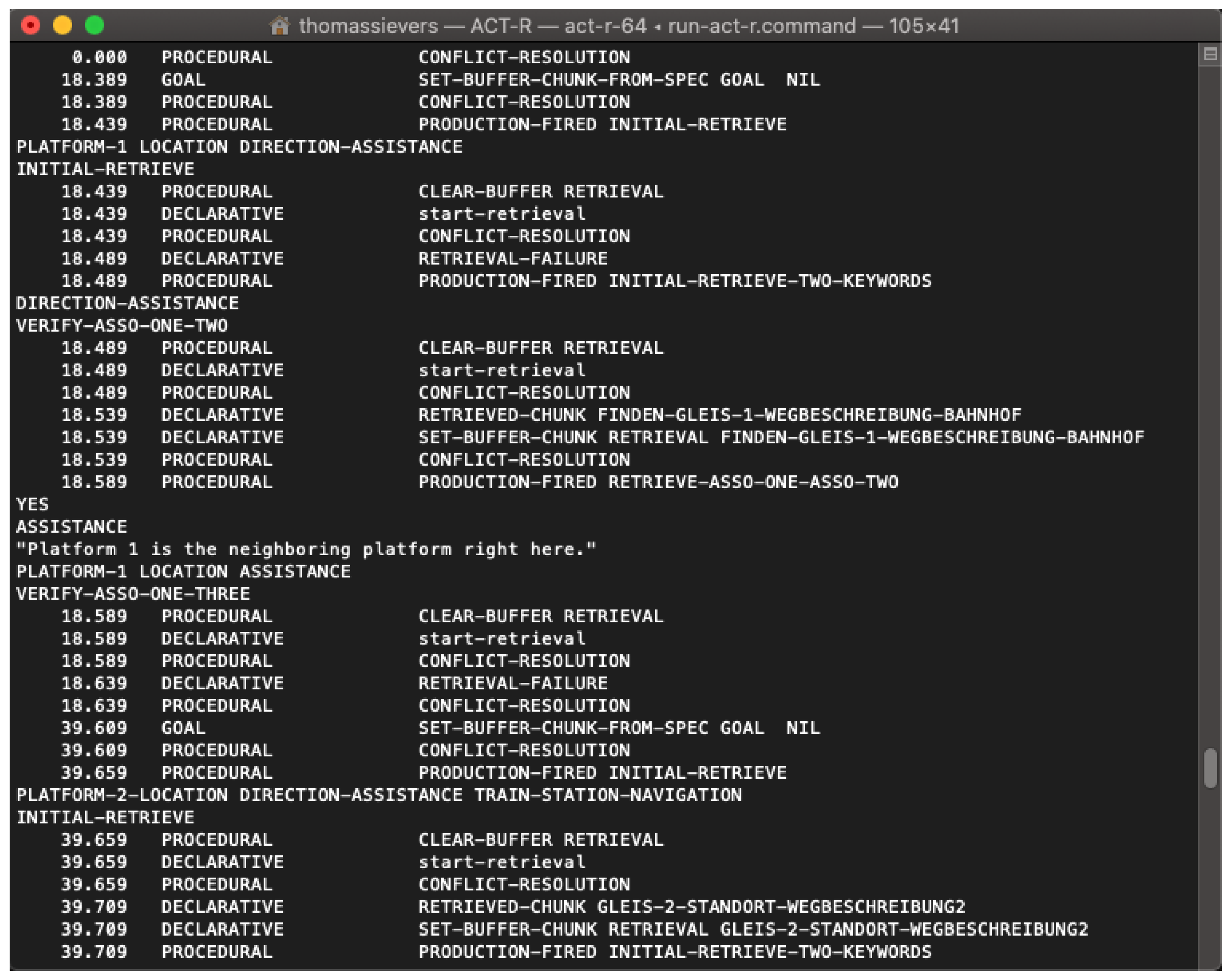
The LLM therefore used the fact correctly, albeit in its own wording and with some embellishment from the scenario conditions. Details of a dialog run can be seen in
Figure 4, showing an output in the graphical tool of the QiSDK robot emulator [
50]. The output of the keywords in square brackets was only for testing purposes and would not be spoken by the robot in a production application. Part of a corresponding trace output of the running ACT-R model is shown in
Figure 5.
4.2. Example Application 2: Recollection Based on Vision
No specific scenario was assumed for this example. The system’s ability to retrieve recollections from declarative memory by recognizing visual impressions from the robot’s perspective should be demonstrated. The procedure was basically similar to that in example 1. Again, the LLM was instructed to create a description of the content in the form of three keywords, but this time it was about the content of an image taken with the robot’s camera equipment. The robot’s front camera took a picture every few seconds to get an actual impression of what the robot was seeing. To prepare a response to a human utterance based on visual impressions, the robot application sent the currently captured image to the GPT-4o model as a completion task, using the type ‘image_url’ instead of ‘text’.
The three image-related keywords from the model’s response were transmitted as chunks to the cognitive model to search for comparable chunks in declarative memory. Here, too, we have previously stored suitable memory chunks for our test scenario in the declarative memory. In the event of a match, the content of the ‘phrase’ chunk slot was transferred to the robot application for use in prompt augmentation.
In our test applications, we focused on the usage of recollections for the prompt augmentation of a GPT model. However, the reverse was also possible, using this system to write memory chunks and thus visual impressions, which are provided with keywords, into the declarative memory in order to retrieve them later in the outlined manner. Below we give an example of a system prompt that not only generates the three keywords, but also provides a ‘phrase’ to describe the image content.
4.2.1. Prompting the LLM
For chunk generation, including a phrase that describes what is contained in this image and is to be stored in the ‘phrase’ slot, we provided a system prompt like the following ‘I am robot, my name is Pepper. I do not answer but create three keywords followed by a sentence with a short description describing what is in this image. The three keywords are enclosed by square brackets. The short sentence is enclosed by round brackets, for example [person, indoor, computer] (A sentence with a short description describing what is in this image)’.
For augmenting the prompt with a recollection, we used, for example, ‘I am robot, my name is Pepper. I can see what is described in the following:’ followed by the phrase recalled from declarative memory. In this way, the LLM could receive and process information about visual recollections stored in the past if similar sensory impressions, and thus, similar keywords are currently present.
4.2.2. Results
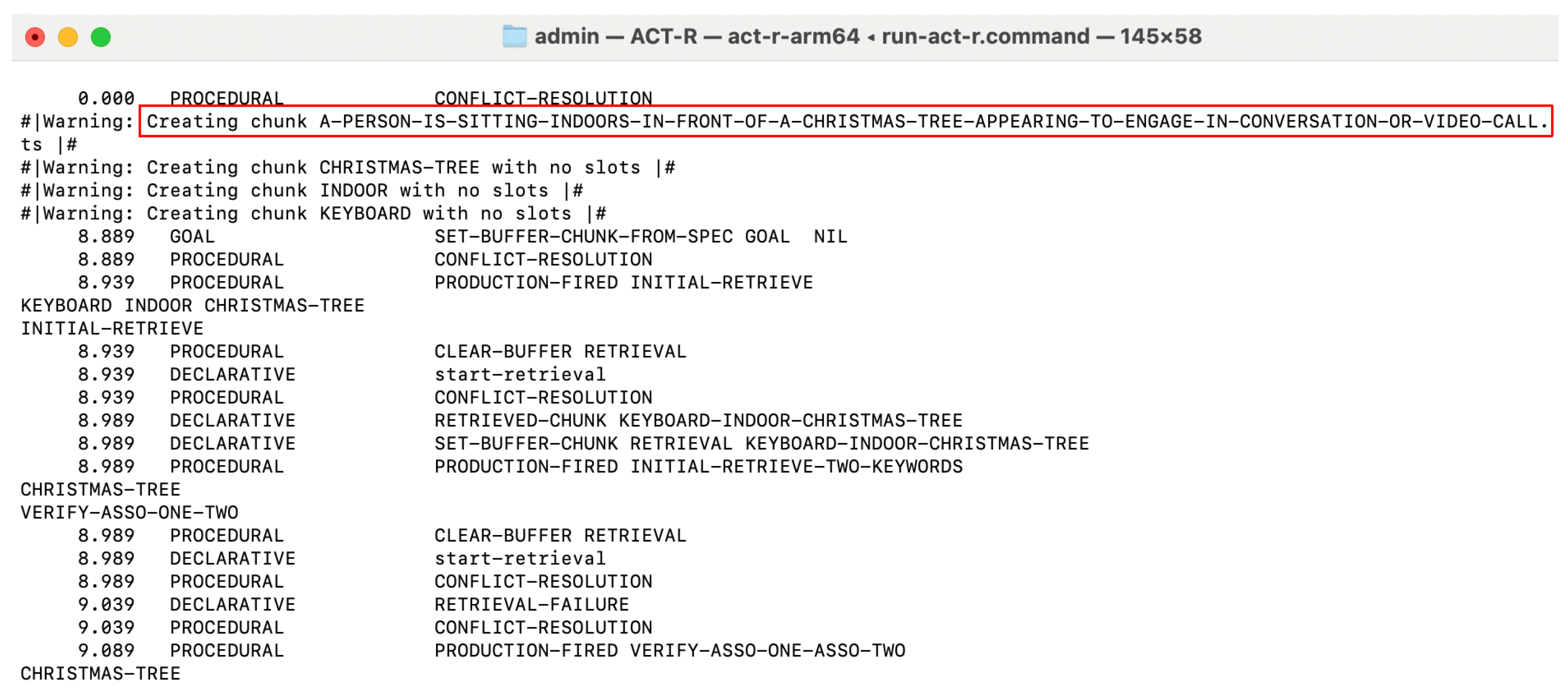
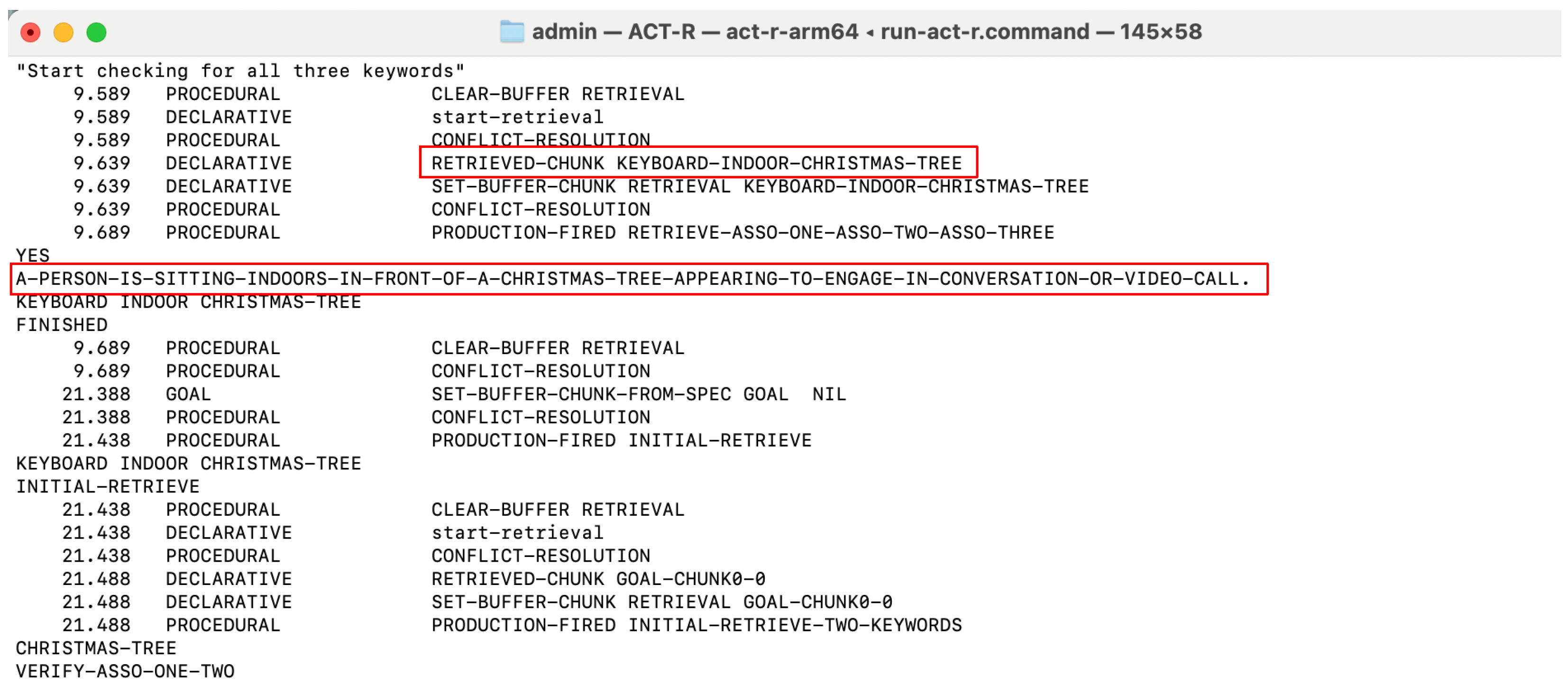
Figure 6 shows the generation of individual chunks from the keywords ‘keyboard’, ‘indoor’, and ‘christmas tree’, and it presents in a frame the phrase ‘A person is sitting indoors in front of a christmas tree appearing to engage in conversation or video call’, supplied by the LLM in the running ACT-R model. These chunks were transferred to the declarative memory of the cognitive model, not only separately, but also as a composite chunk consisting of keywords and phrase. To be able to save keywords and phrases as chunks, spaces had to be replaced by a ‘-’. The procedure was reversed when the phrase was used for prompt augmentation. A retrieval of a recollection by the ACT-R model is shown in
Figure 7 in framed areas. The model searches the stored memory chunks using the supplied keywords to find a matching recollection, the content of which is passed from the ‘phrase’ slot to the robot application for use in prompt augmentation.
5. Discussion
On the one hand, cognitive models can be used within the framework of their cognitive architectures to anticipate human behavior and thus make human cognitive processes more understandable—even for a robot. On the other hand, cognitive processes can use declarative and procedural memory to produce decisions which, when used to control the actions of a robot, allow the robot to act in a more humane way. Such processes can therefore be used to make human actions understandable for the machine, but also to make the robot’s actions more comprehensible for the human in HRI. Kambhampati introduced the term human-aware AI to refer to AI systems that are explainable to humans in the loop and capable of working synergistically with humans [
51].
The possibility of using cognitive architectures to unlock human-like judgment and decision-making capabilities such as instance-based learning and intuitive decision making for social robots can be an opportunity for greater acceptance and trust through more common ground and similarities in the way we—humans and robots—think. With the help of LLMs and VLMs and the corresponding sensors, robots can access and interpret the same information that is available to humans. The use of declarative and procedural memory in cognitive models makes it possible to process the data provided by robot sensors and language models in a human-centered way. We only outline the possibilities here with our example applications for storing visual impressions or facts together with keywords and using them for the prompt augmentation of an LLM. In general, there are far more options available for a programmatic implementation of cognitive models with ACT-R or similar frameworks in combination with social robots. For example, one could consider using descriptions generated by a VLM of what the robot is currently seeing to match visual perceptions between humans and robots via memory functions of a cognitive model. Other examples include situation awareness systems and cognitive digital twins [
52,
53]. Harnessing the memory and decision-making capabilities of cognitive models can even be a step towards Continual Learning (CL) that can adapt to the ever-changing needs, preferences, and environments of users [
54].
The proposed system and procedure is not without shortcomings and open problems. It is well known that LLMs and VLMs are sometimes prone to hallucinations. One possible way to reduce the risk of such hallucinations and the reproduction of made-up statements by an LLM, such as OpenAI’s GPT, would be to provide the language model with additional information tailored to individual scenarios via the system prompt, as we suggest in our application example based on remembered facts. However, even such a method of constraining the LLM does not offer absolute certainty for the exclusion of hallucinations.
To date, we have only tested the method with a few, mostly predefined memory contents, but we consider it scalable with regard to more complex cognitive models and the use of concepts such as forgetting, learning new facts, and reinforcement of recollections, or further possibilities made possible by the cognitive architecture of ACT-R.
The system works in real time and can be used for fluent dialogs between humans and robots. However, the time required to retrieve relevant recollections could play a limiting role, depending on the amount of memory chunks available. In addition, for each interaction with the human user, our system requires two consecutive API calls to the GPT model, both of which have a certain latency. Together, these time aspects may cause a noticeable and unnatural delay in interaction, even if there was no significant difference to conventional use with just one call to the GPT API in our tests.
Furthermore, it also seems to be a disadvantage and increases the complexity that the implementation of the cognitive architecture in our test applications runs as a standalone version on an extra computer and not on the robot itself. However, this problem could be solved by using other robot models and thus other ways of implementing the cognitive architecture, such as pyactr, as an ACT-R implementation for the Python-based robot Navel [
55,
56].
6. Conclusions
We propose a design and development approach for a combined system consisting of an ACT-R cognitive model and a humanoid social robot to endow the robot with human-like memory capabilities. Recollections from the declarative memory of the ACT-R model could be retrieved using real-world data obtained by the robot via an LLM or VLM. The procedural memory, which consists of the productions of the cognitive model, was used to retrieve these recollections and return them to the robot as instructions for action. In addition, real-world data captured by the robot could be stored as memory chunks in the cognitive model’s declarative memory.
In an example application, such a system was used to improve the correctness and accuracy of GPT-4o’s reasoning capabilities by using recollections for prompt augmentation. Another example application delivered keyword labeled visual impressions of the robot to the declarative memory or retrieved recollections based on these impressions. We tested this system with the social robot Pepper. In principle, however, this method can also be used independently of HRI scenarios.
Regarding the explainability aspects, our system provides approaches for a possible constraint of LLMs to generate robot utterances in HRI by comprehensible memory contents. The type of possible connection or integration of the cognitive model depends on the robot’s operating system and on whether or which ACT-R implementations or implementations of a comparable cognitive architecture are available for it. For example, there are direct implementations for Python, which means that the standalone version of ACT-R on an external computer and thus also the TCP/IP connection between the cognitive model and the robot application could be avoided.
The use of a cognitive architecture such as ACT-R enables the inclusion and investigation of further cognitive principles and processes in interaction with a social robot and LLMs independent of memory skills and declarative memory retrieval. Future work should consider these aspects in more detail. For the future, we are also planning studies to investigate metrics such as latencies in the use of the LLM and the cognitive model, as well as the precision of the associated memories and their use for prompt augmentation in more detail. An ablation study would also be helpful to investigate the added value and effectiveness of our approach more closely. Further experiments are needed to optimize the ACT-R models and system prompts for the LLM, as well as ongoing evaluation in studies with different people and different robot systems for various tasks. We are confident that this will open up a wide range of possibilities for future research into how cognitive architectures and their models can add a human touch to a social robot in HRI.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}