
A Magnetotelluric Signal Acquisition and Monitoring System Based on a Cloud Platform


Abstract
1. Introduction
2. Overall Design
2.1. Method
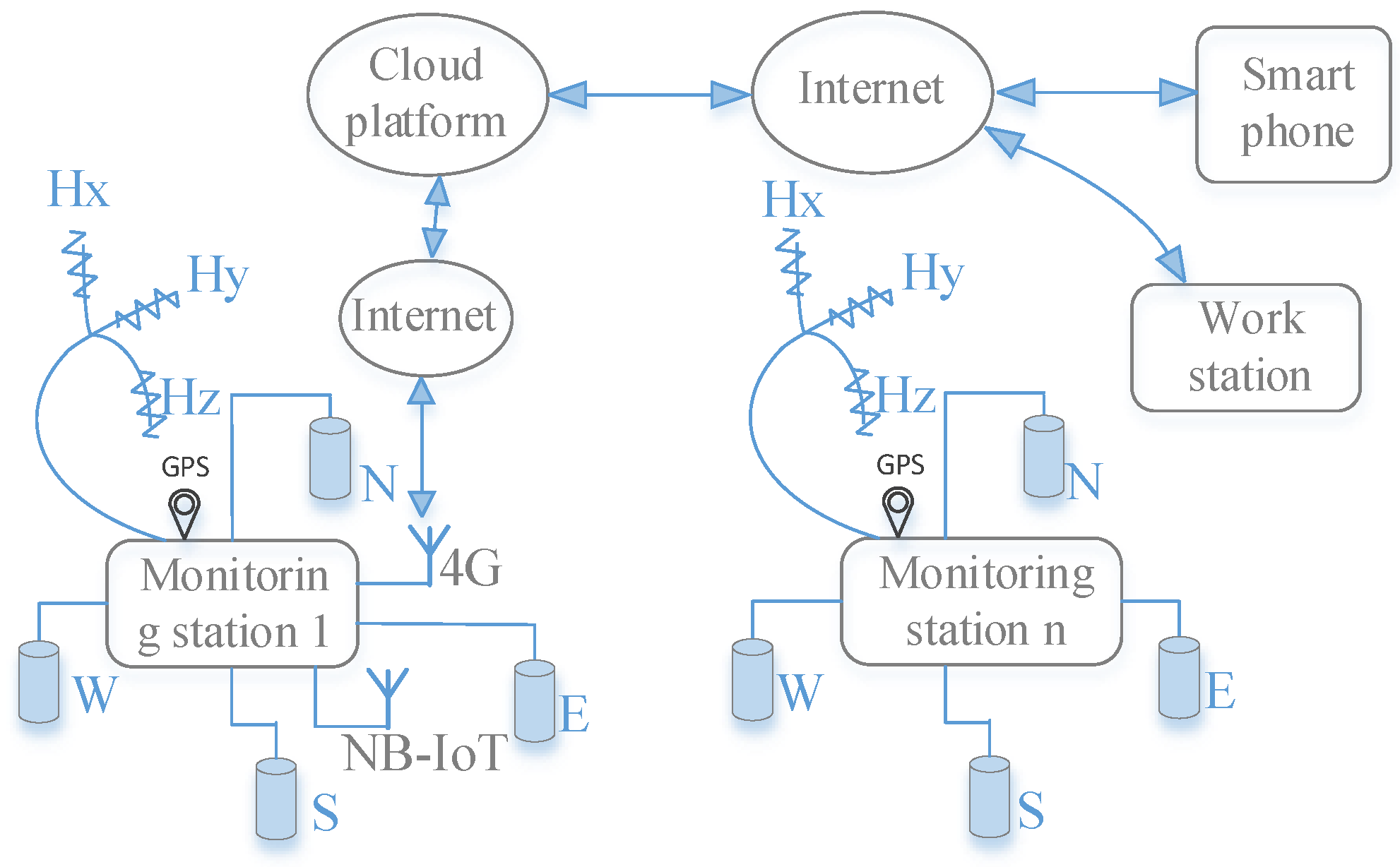
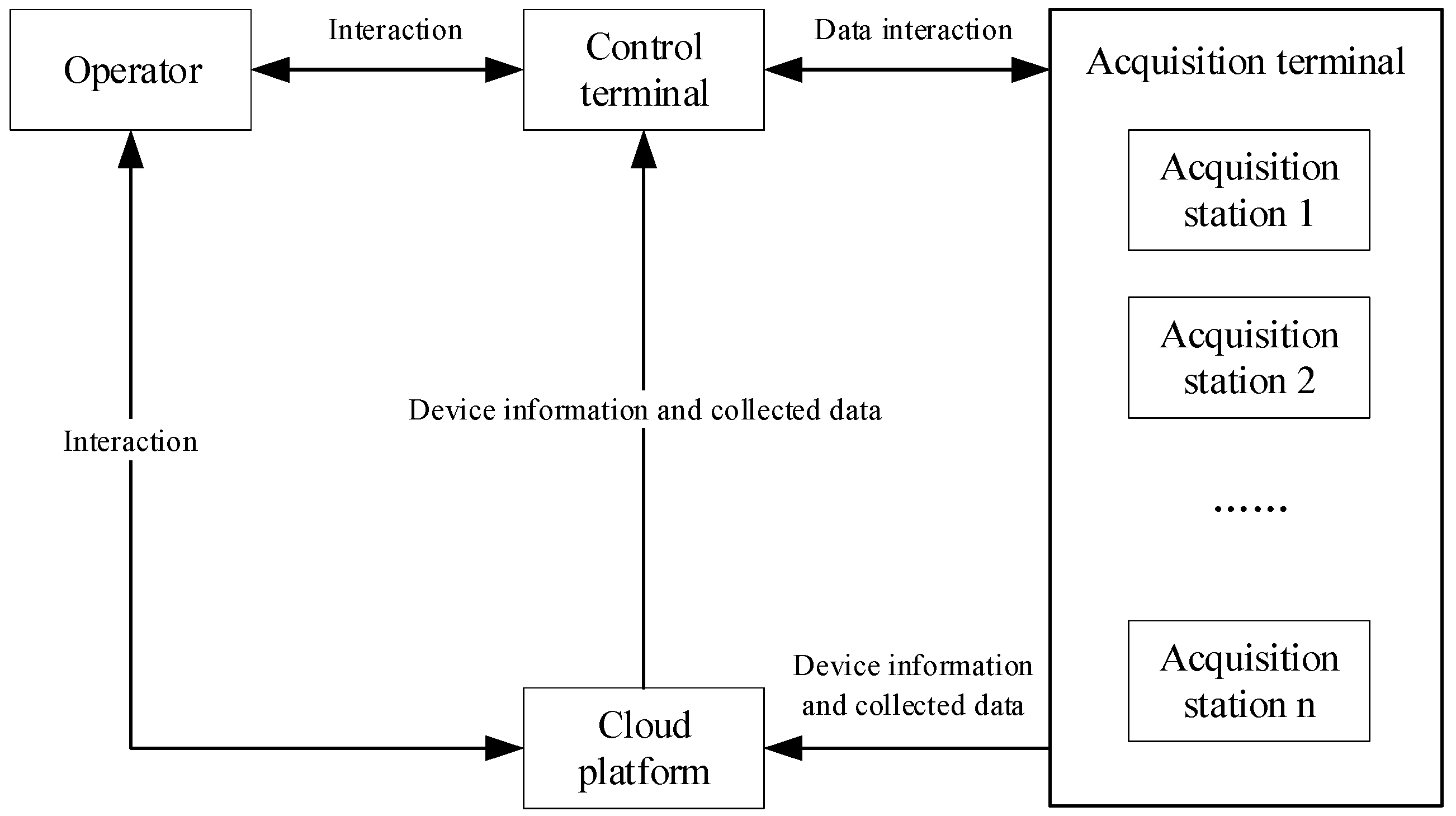
2.2. System Overview
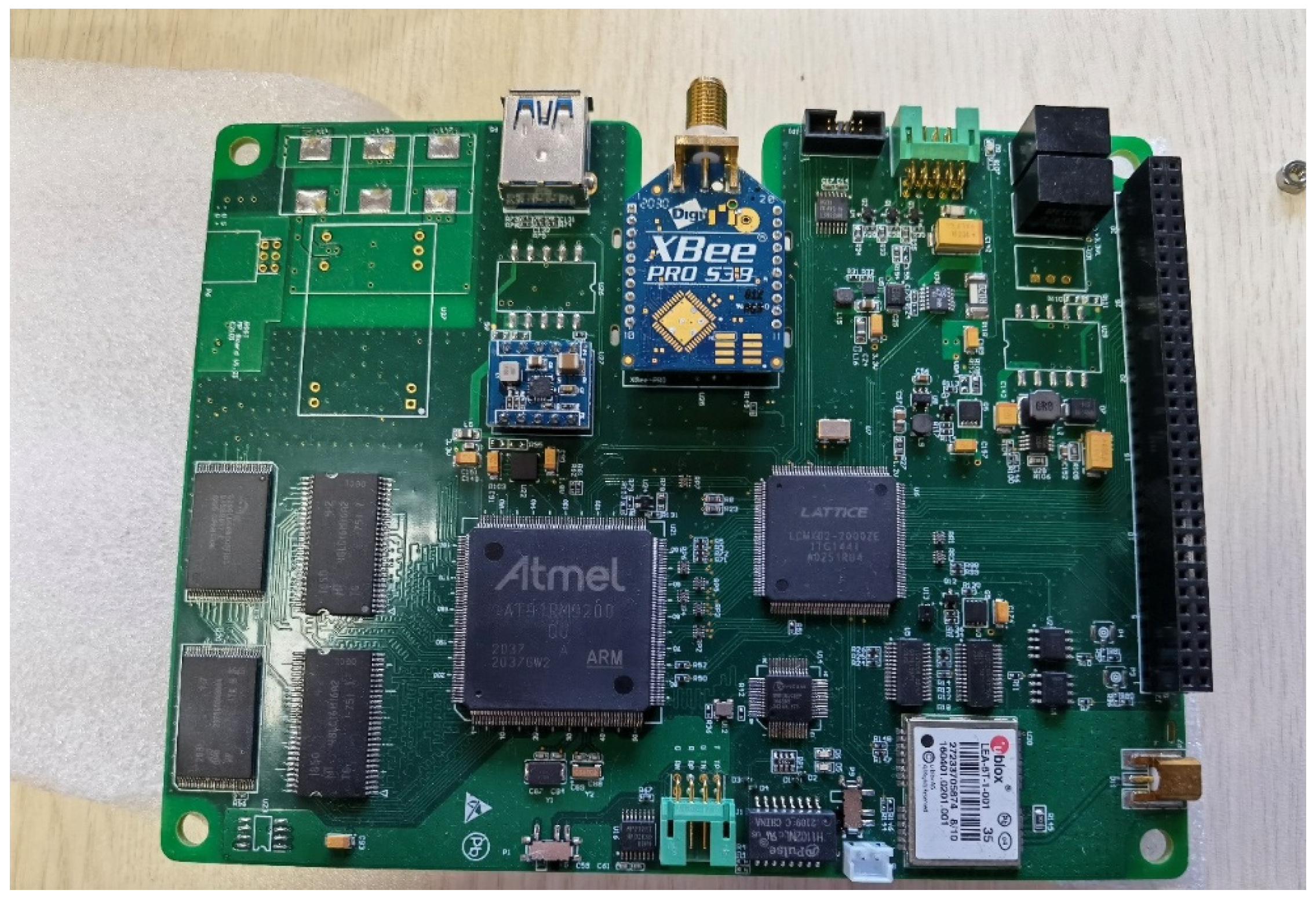
3. Development of the Magnetotelluric Monitoring Receiver
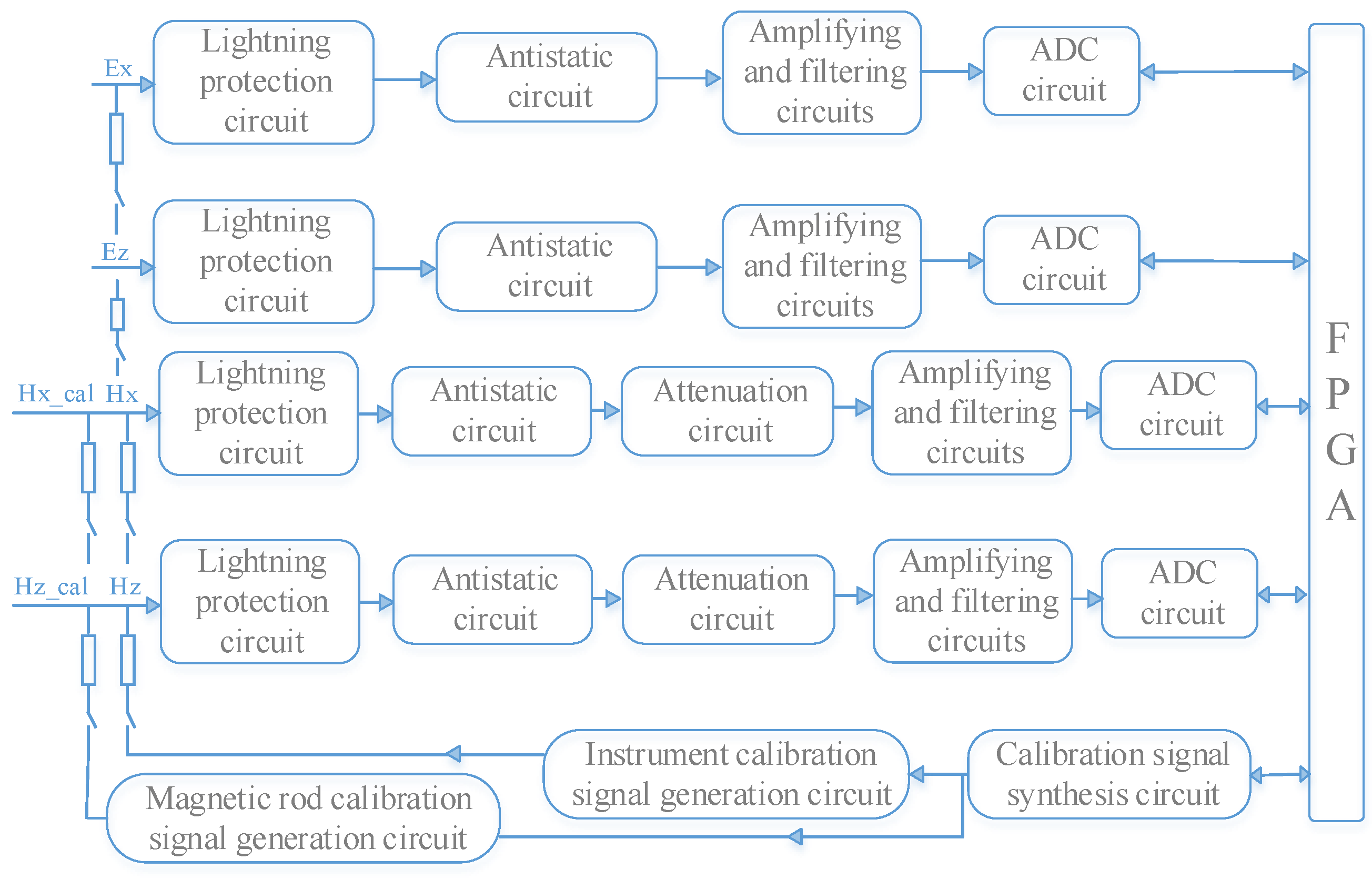
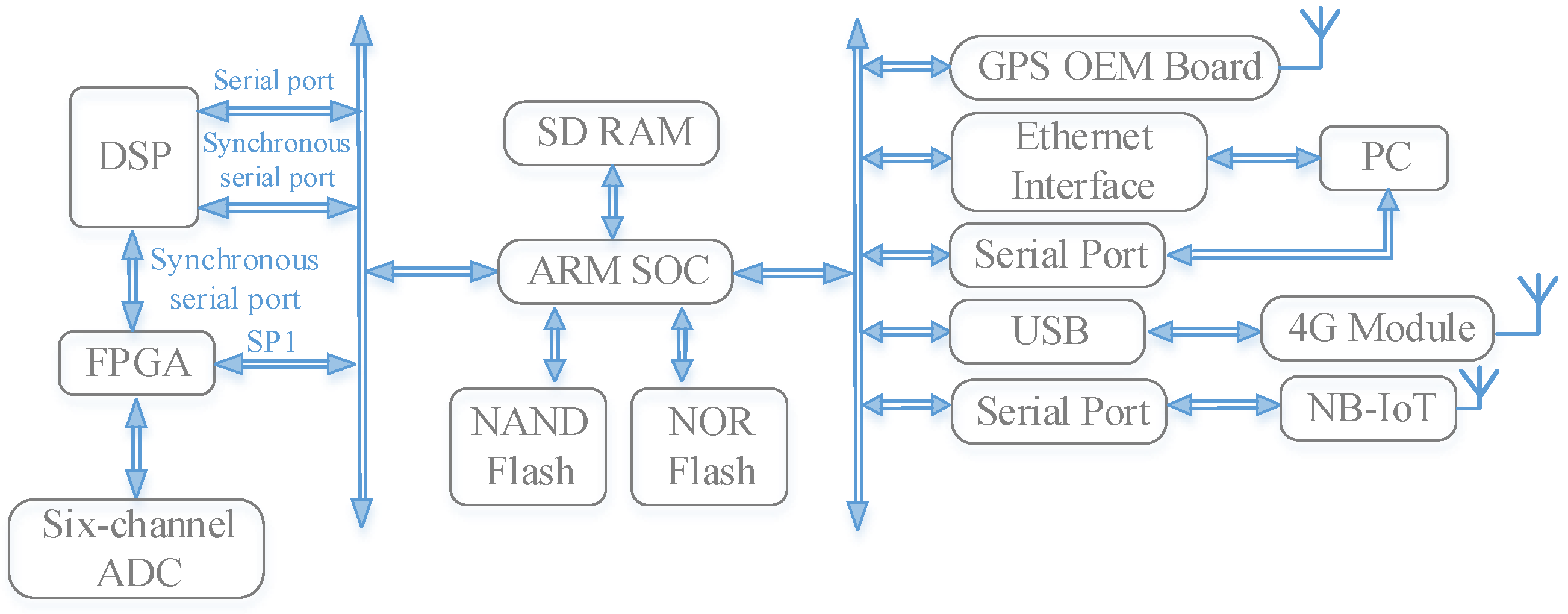
3.1. Hardware Circuit Design
3.2. Acquisition Software Development
4. Development of Terminal Control Software
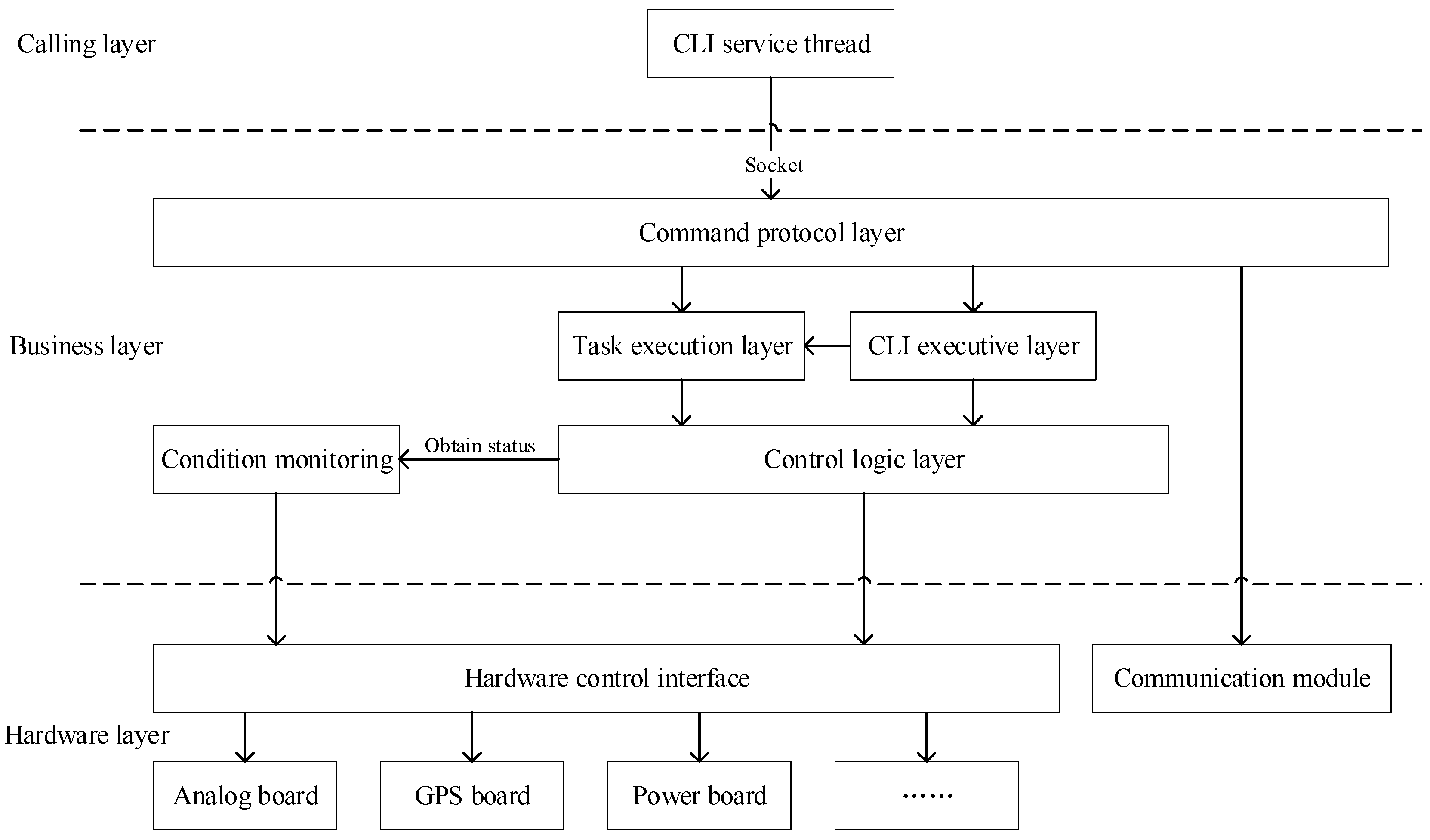
4.1. Functional Framework
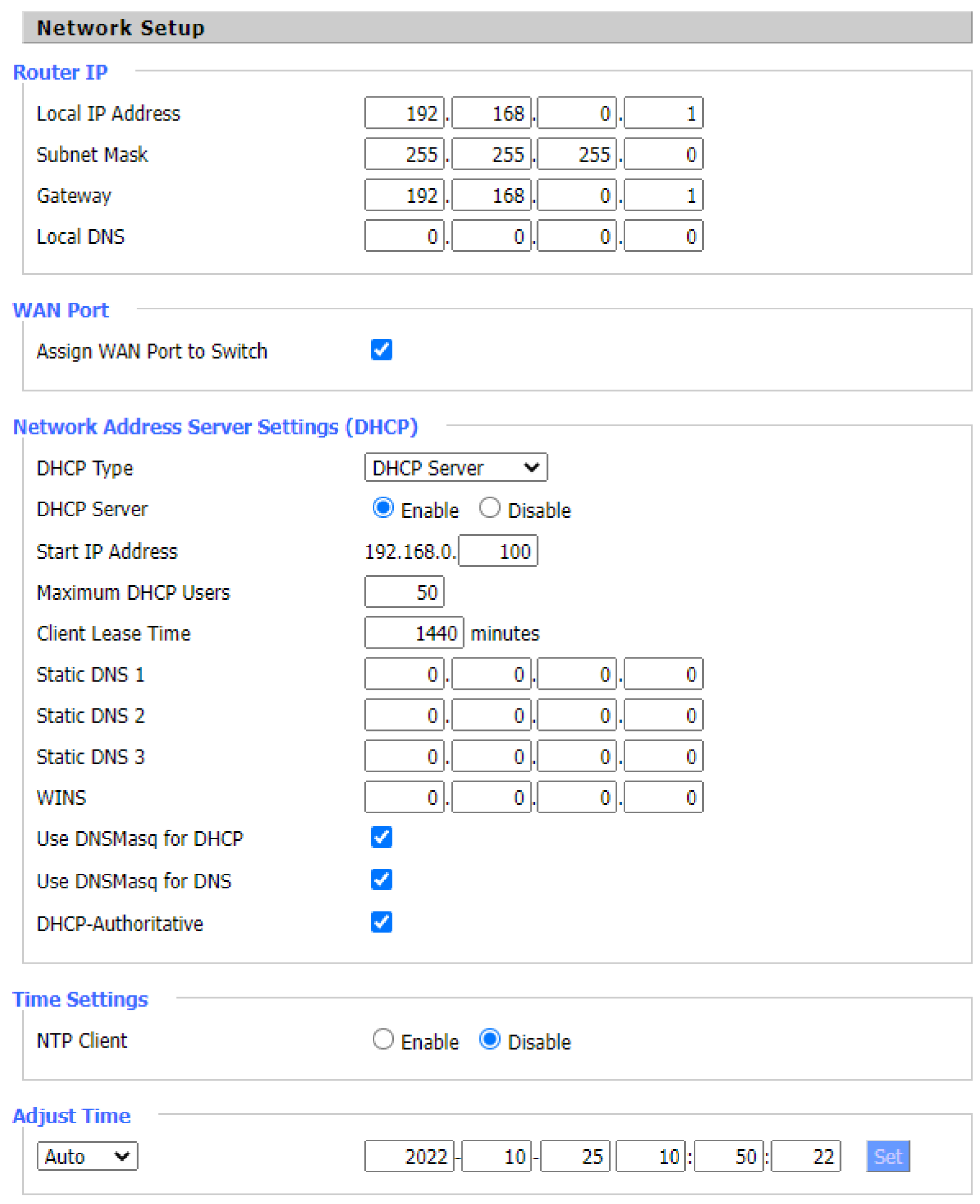
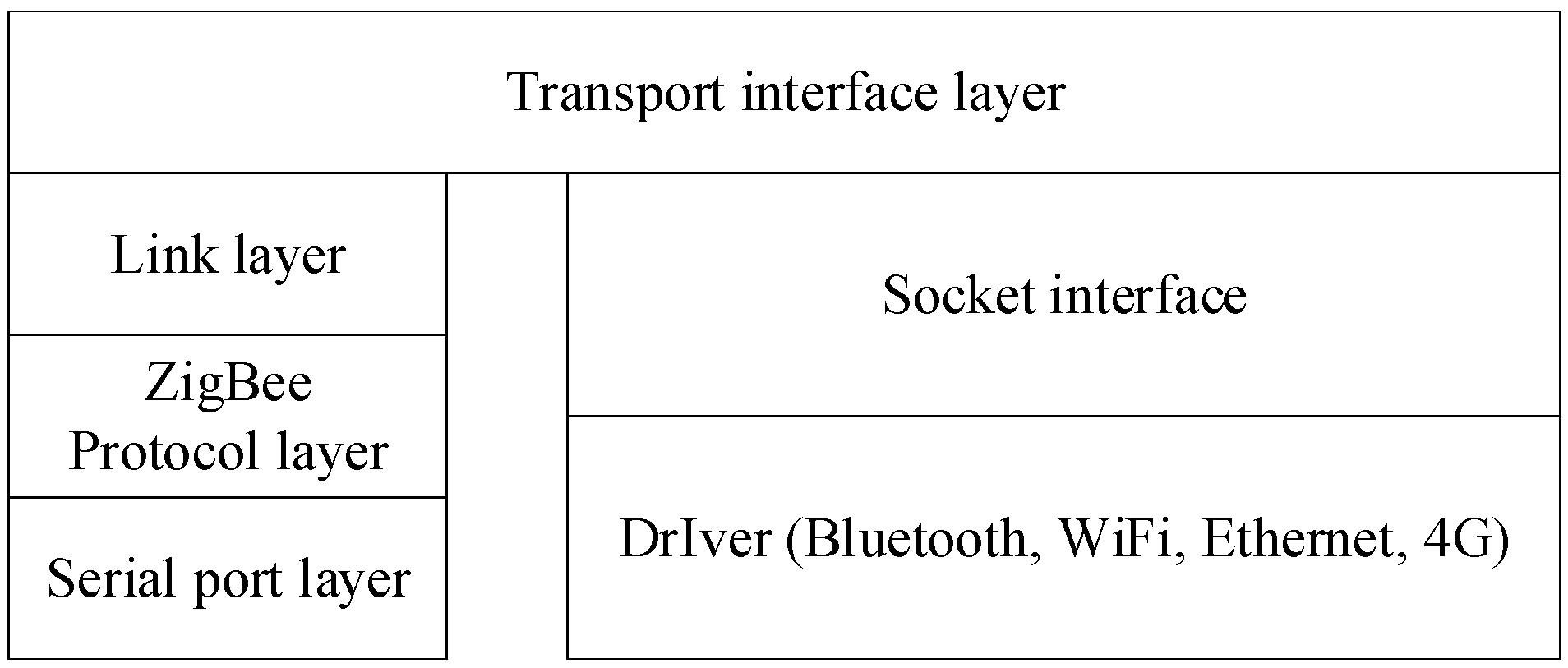
4.2. Communication Module
5. Development of Cloud Platform Monitoring Software
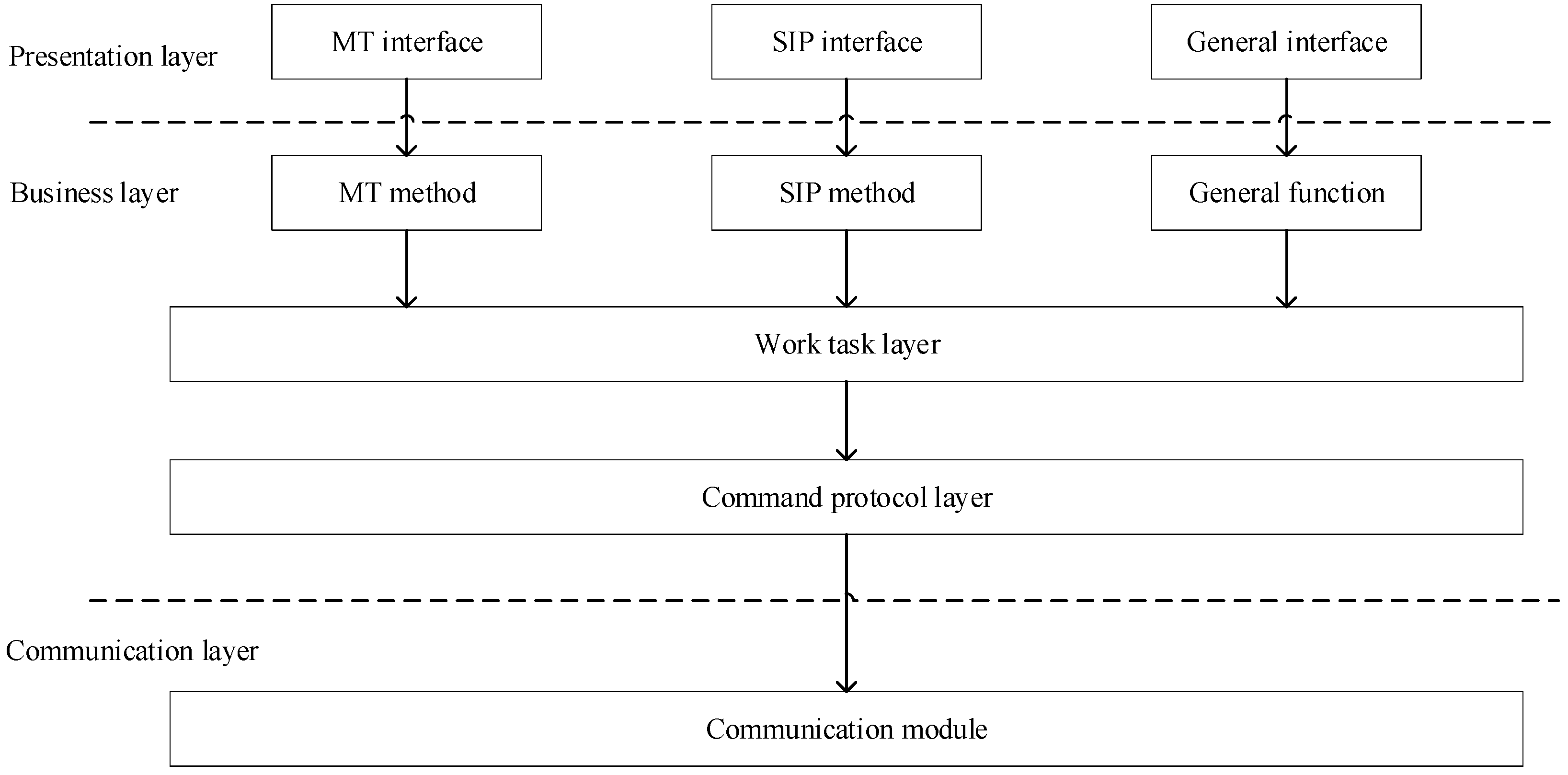
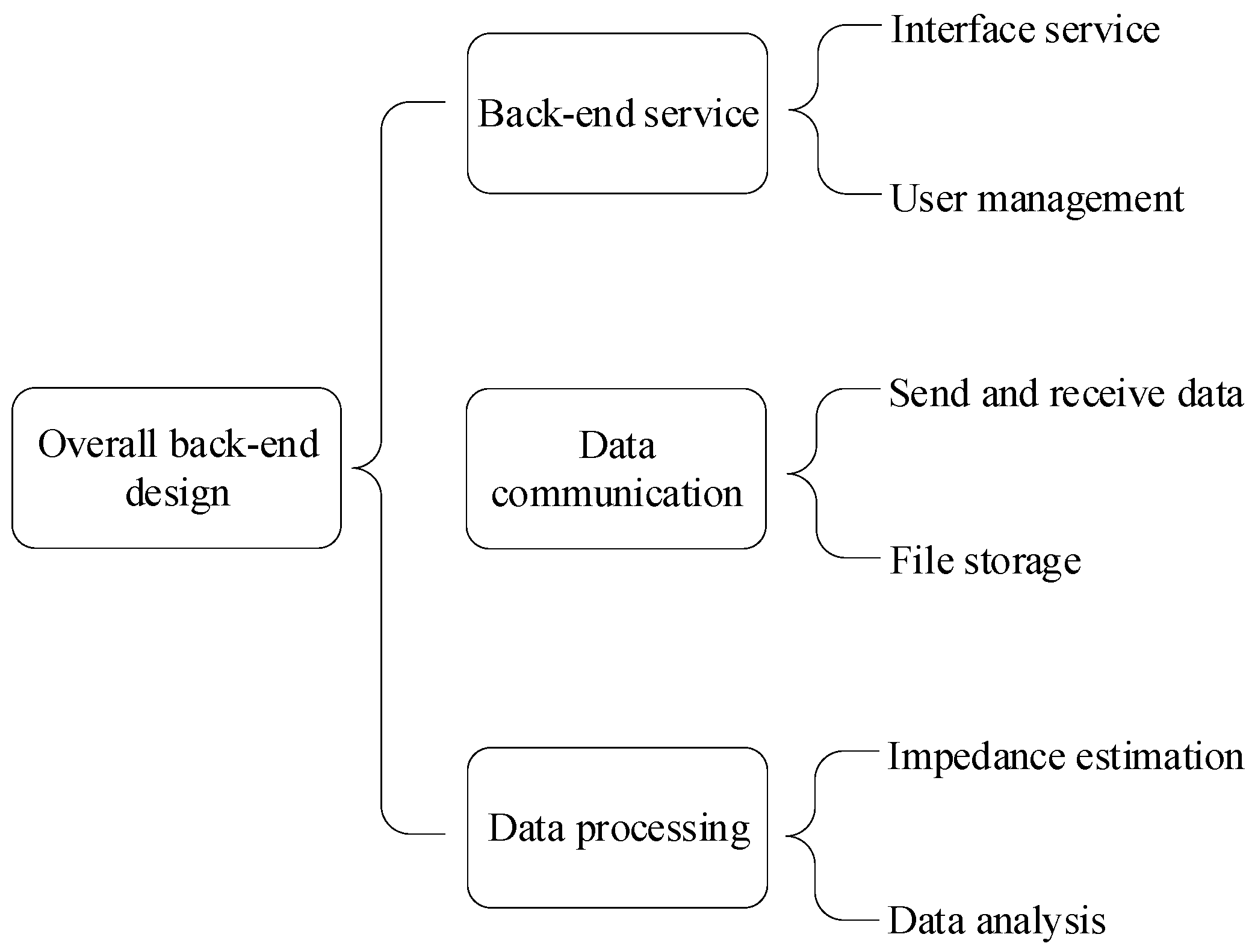
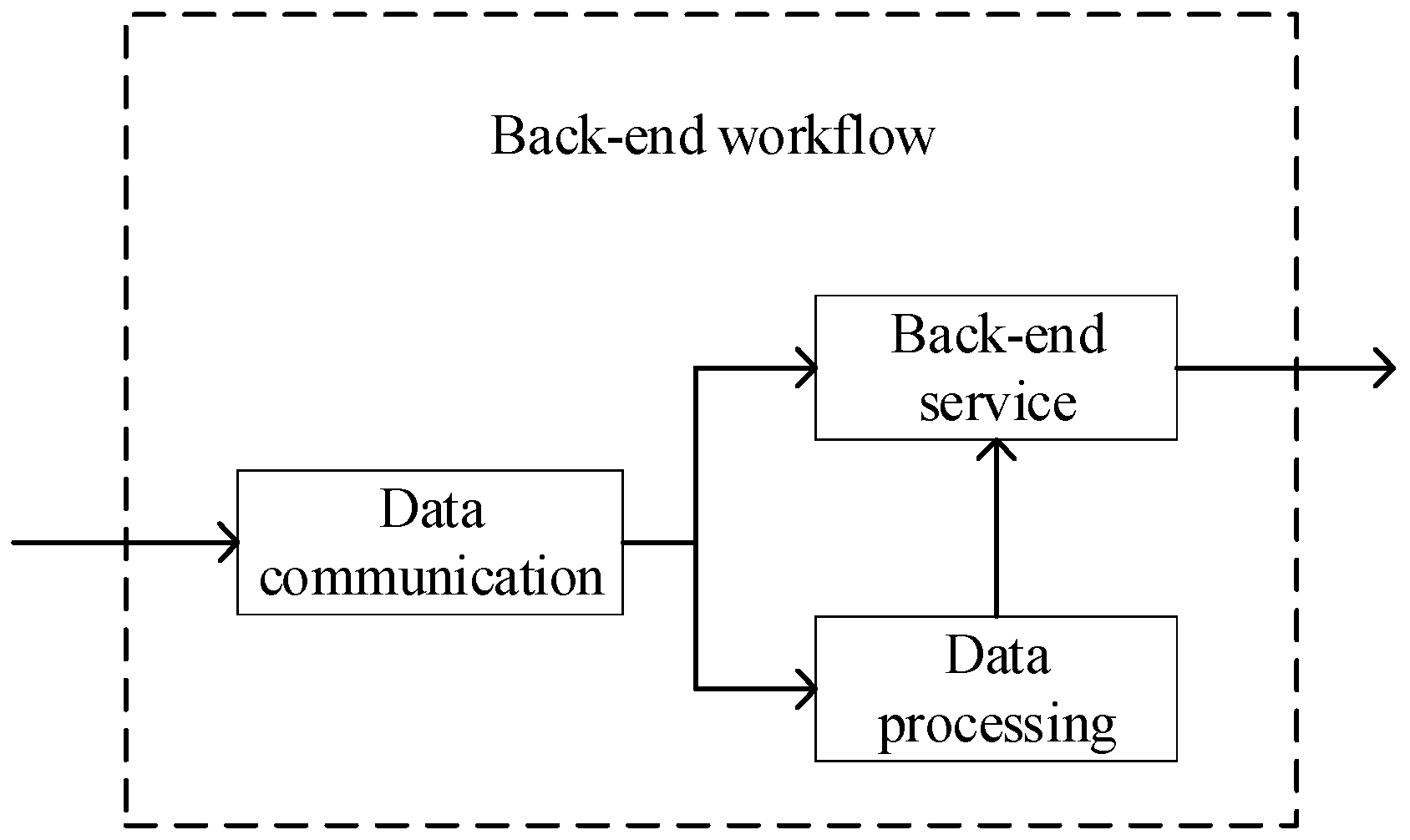
5.1. Functional Framework
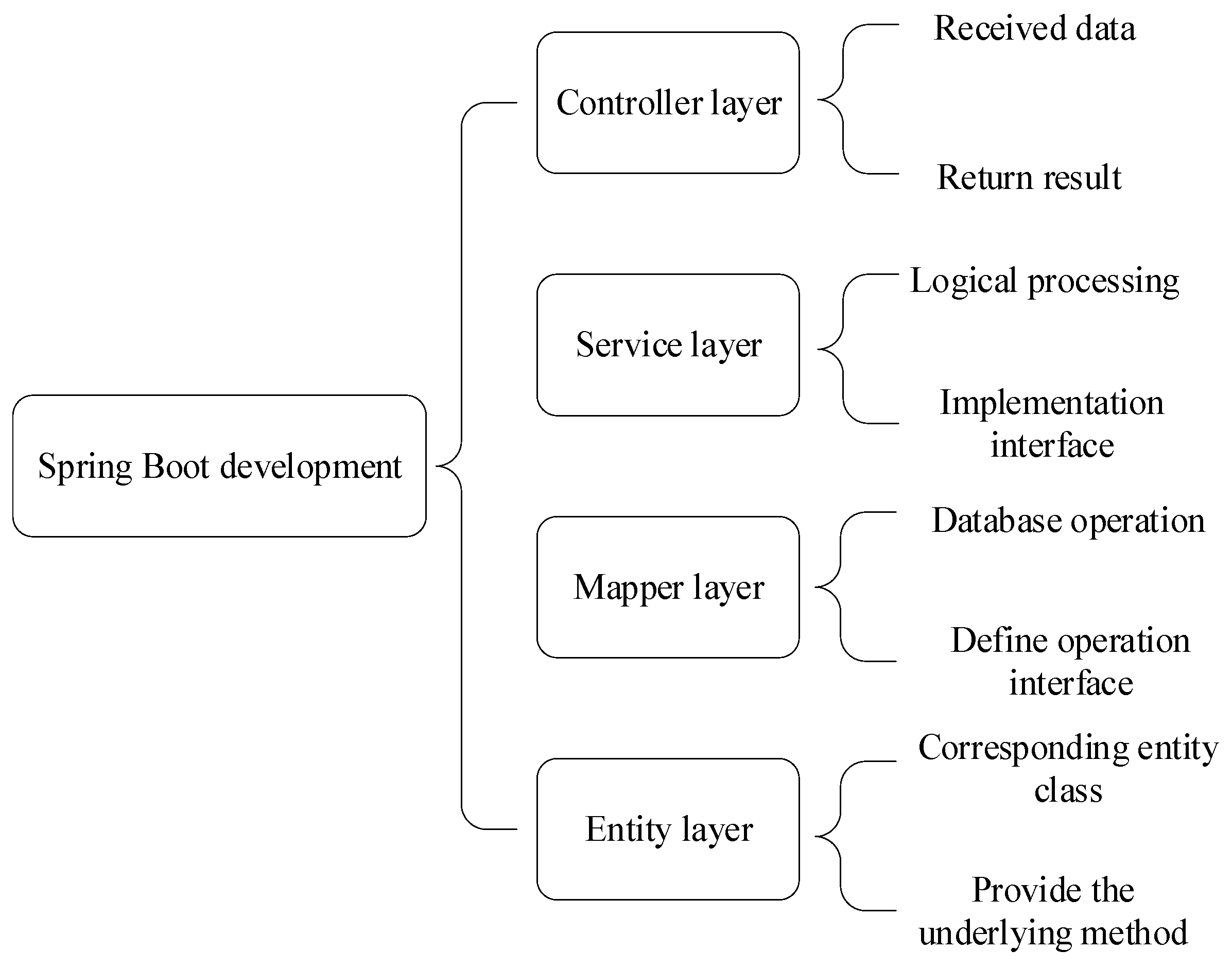
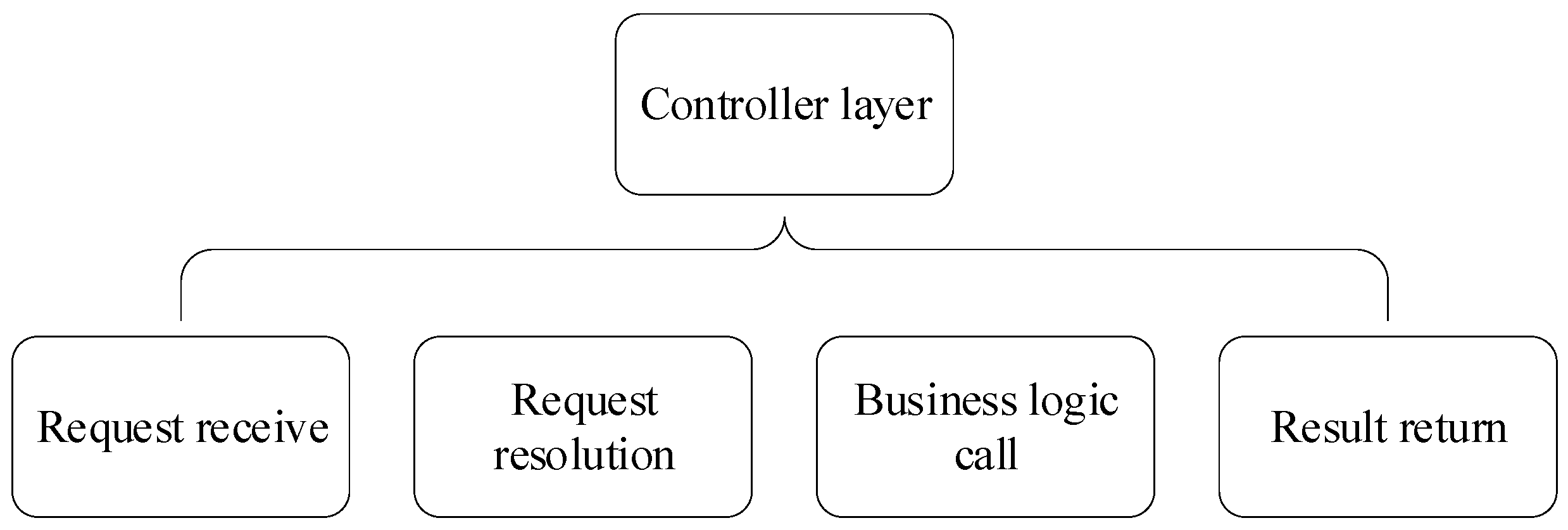
5.2. Backend Service Development
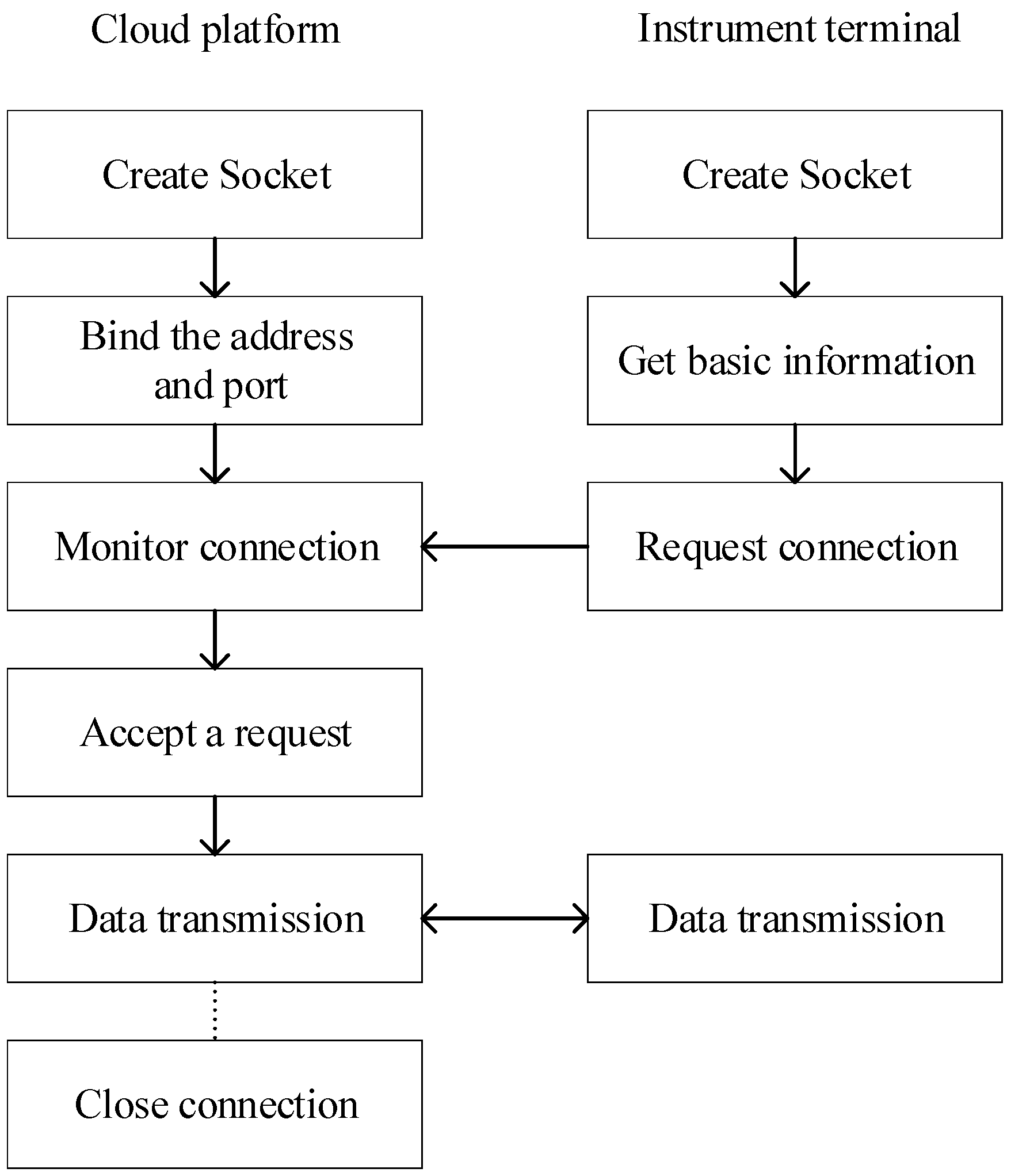
5.3. Data Communication Development
- (1)
- The instrument and cloud platform first create a Socket object by calling the socket function and specifying the Socket type.
- (2)
- The cloud platform server binds the Socket object to a specific IP address and port number by calling the bind function. This port is the server’s identifier for establishing a connection with the instrument.
- (3)
- The cloud platform server starts listening for connection requests from the instrument client by calling the listen function.
- (4)
- The instrument client sends a connection request to the server via Socket based on the server’s IP address and port number.
- (5)
- The cloud platform server listens for connection requests from the instrument client and accepts the connection request by calling the accept function, returning a new Socket object for communication with the instrument client.
- (6)
- After the connection is established, the server and client can transmit data through their respective Socket objects, sending and receiving data by reading and writing data streams on the Socket object.
- (7)
- When the communication is completed or an error occurs, the Socket object is closed, ending the connection and releasing resources.
6. Results
6.1. Server Stress Testing
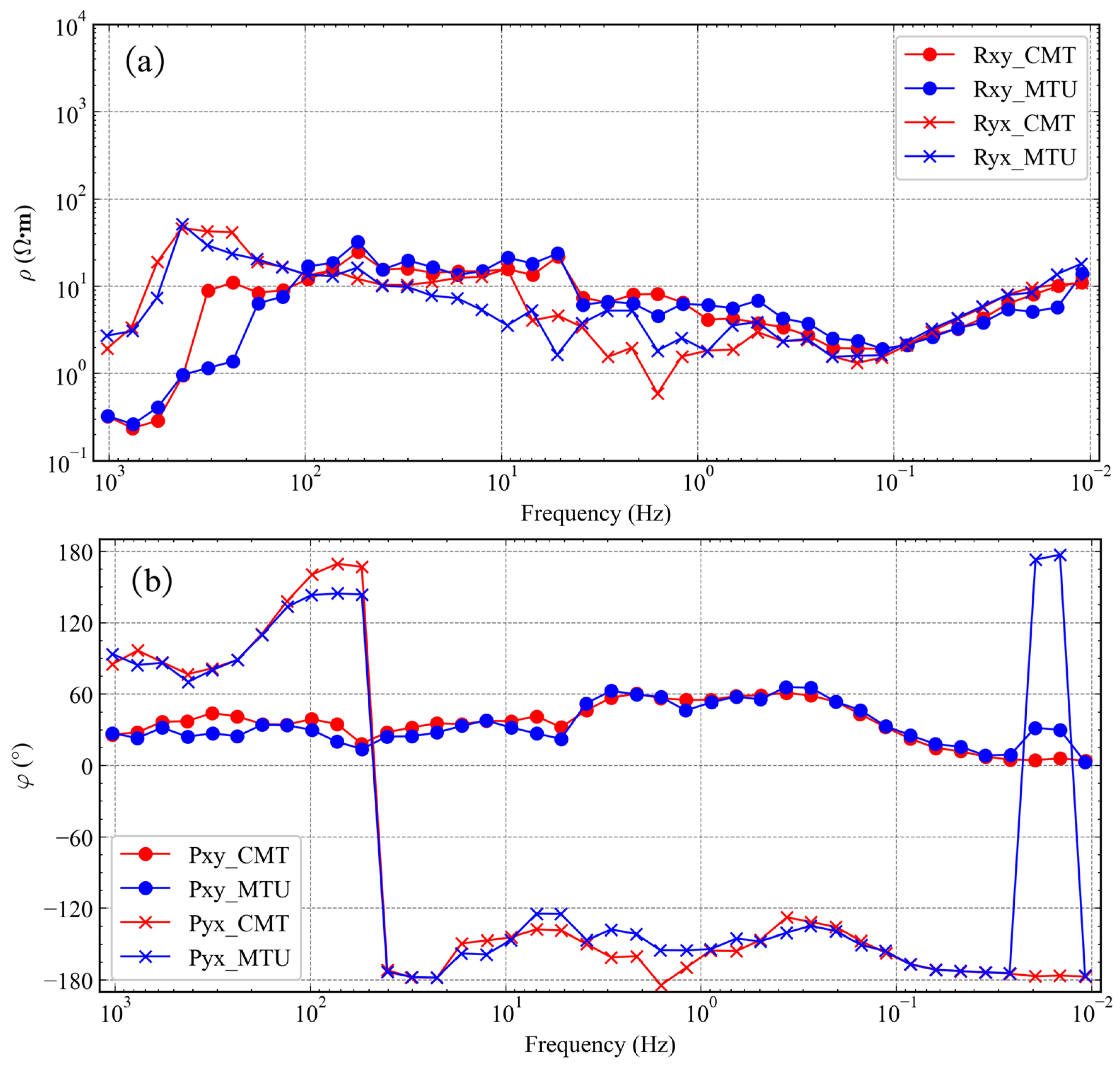
6.2. Consistency Testing
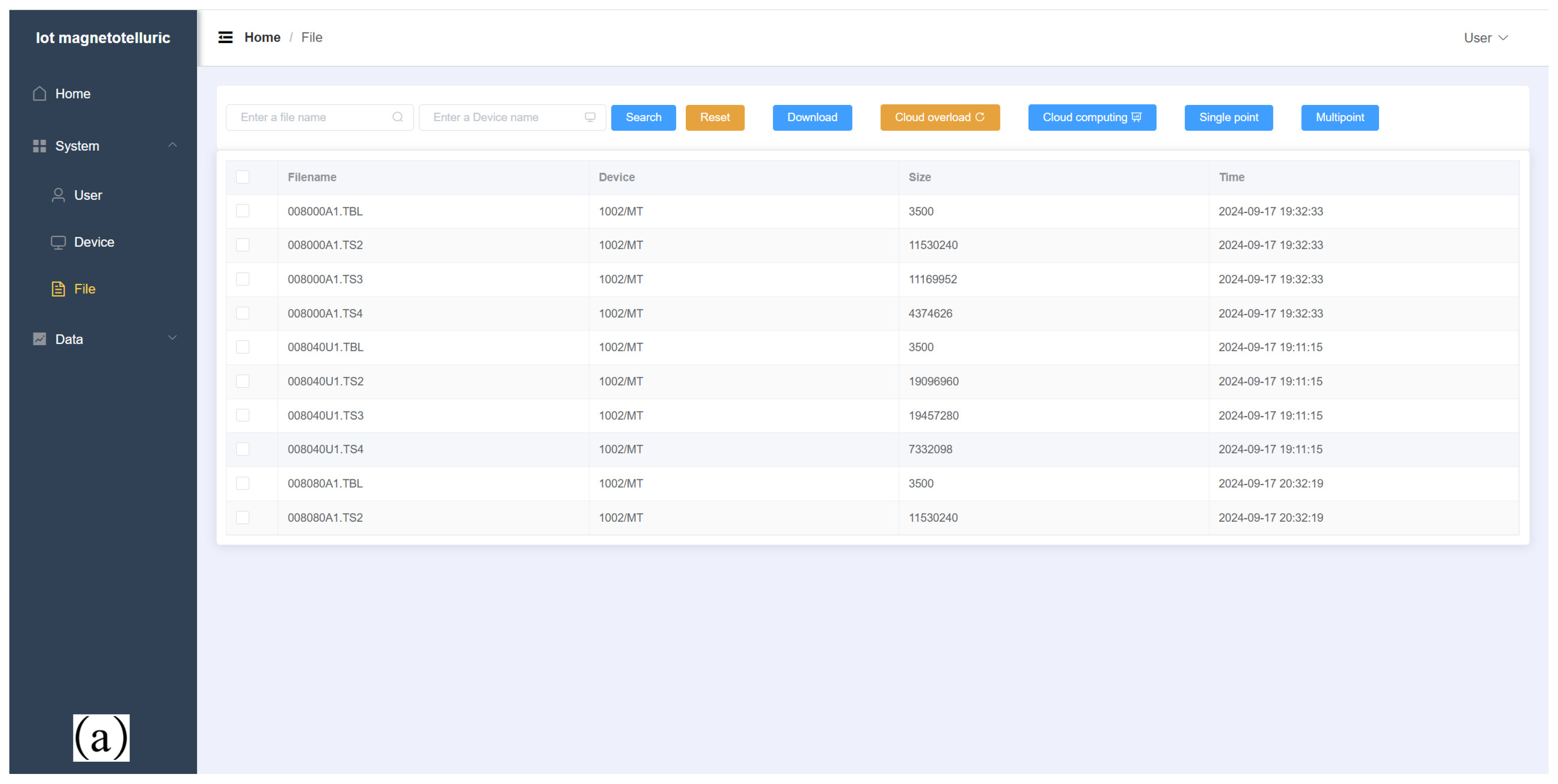
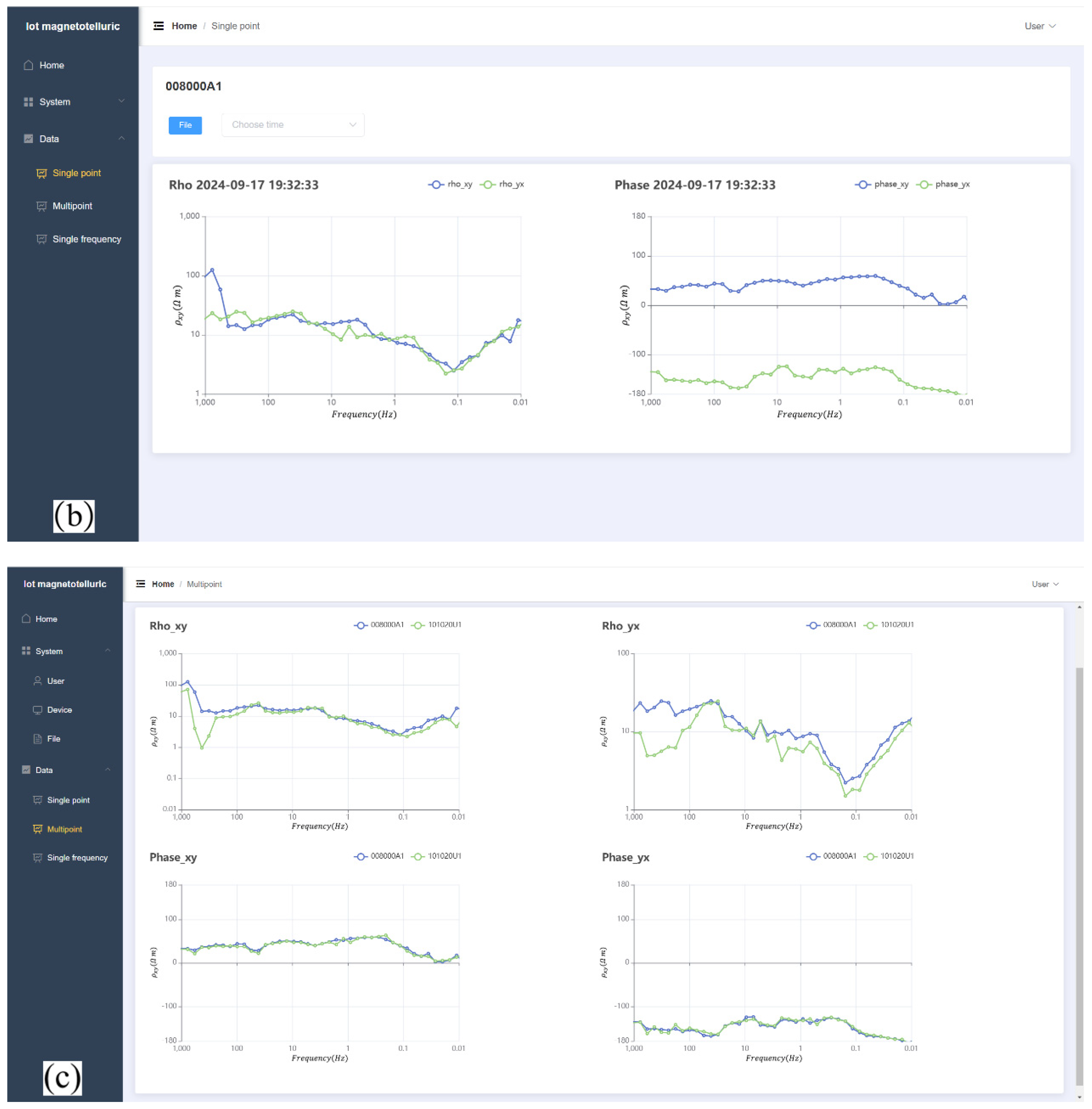
6.3. Cloud Platform Testing
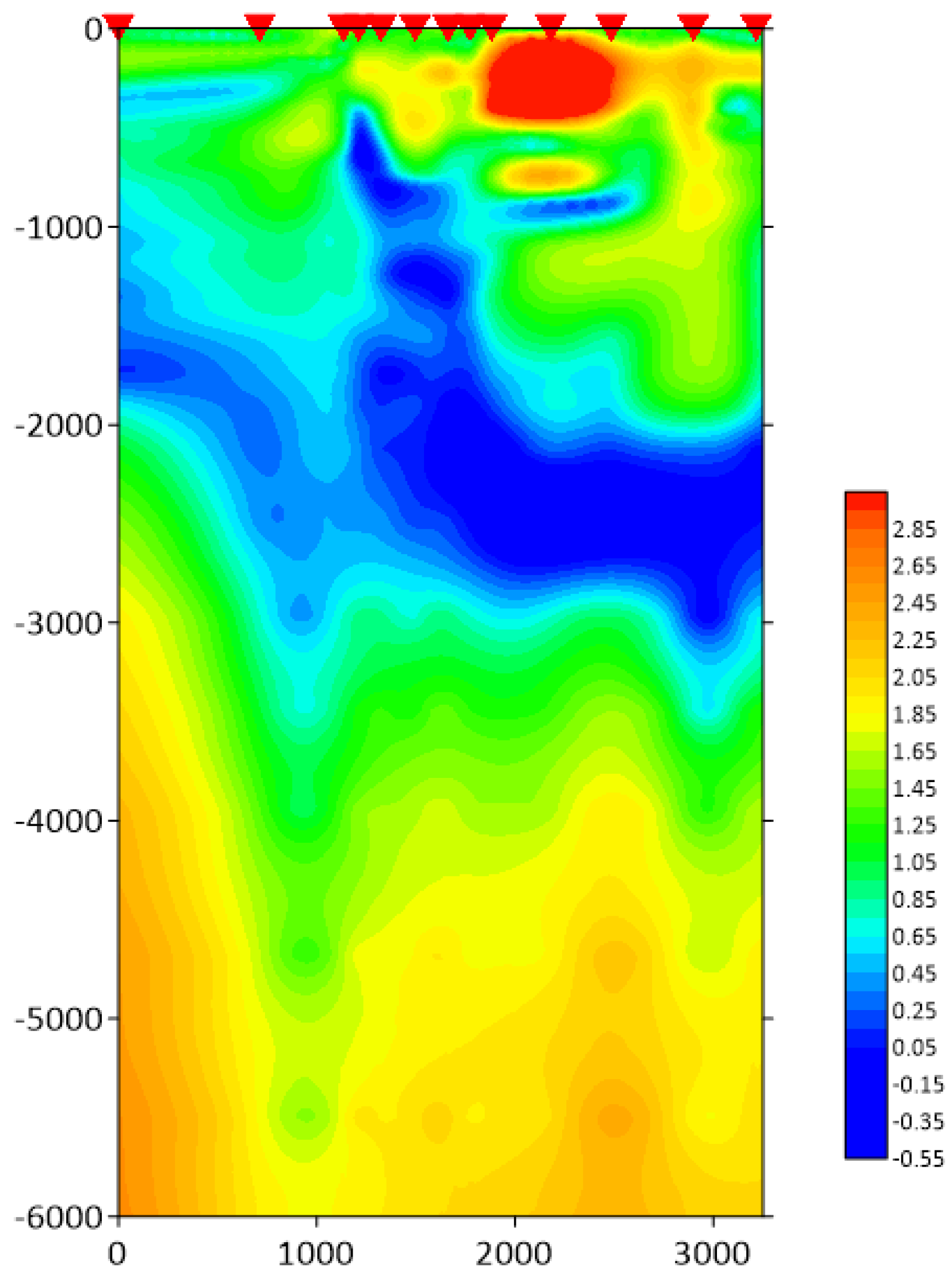
6.4. Inversion Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kearey, P.; Brooks, M.; Hill, I. An Introduction to Geophysical Exploration; John Wiley & Sons: Hoboken, NJ, USA, 2002; Volume 4. [Google Scholar]
- Kana, J.D.; Djongyang, N.; Raïdandi, D.; Nouck, P.N.; Dadjé, A. A review of geophysical methods for geothermal exploration. Renew. Sustain. Energy Rev. 2015, 44, 87–95. [Google Scholar] [CrossRef]
- Chalikakis, K.; Plagnes, V.; Guerin, R.; Valois, R.; Bosch, F.P. Contribution of geophysical methods to karst-system exploration: An overview. Hydrogeol. J. 2011, 19, 1169. [Google Scholar] [CrossRef]
- Bogoslovsky, V.A.; Ogilvy, A.A. Geophysical methods for the investigation of landslides. Geophysics 1977, 42, 562–571. [Google Scholar] [CrossRef]
- Zhdanov, M.S. Geophysical Electromagnetic Theory and Methods; Elsevier: Amsterdam, The Netherlands, 2009; Volume 43. [Google Scholar]
- Thiede, A.; Ramotoroko, C.D.; Junge, A. Combined multivariate MT Processing for MTU (Phoenix) and ADU (Metronix) Measurement Systems. In 28. Schmucker-Weidelt-Kolloquium für Elektromagnetische Tiefenforschung; Deutsche Geophysikalische Gesellschaft e. V.: Kiel, Germany, 2020; pp. 58–65. [Google Scholar]
- Rais, A.M.; Nur, A.P.; Tricahyaningati, D. Android Real Time Earthquake & Tsunami Warning Alert System Based on Open Data of Indonesia Government Agency of Geophysics. IOP Conf. Ser. Earth Environ. Sci. 2022, 1095, 012008. [Google Scholar]
- Salaree, A.; Stein, S.; Saloor, N.; Elling, R. Turn your smartphone into a geophysics lab. Astron. Geophys. 2017, 58, 6–35. [Google Scholar] [CrossRef]
- Fortunato, M.; Ravanelli, M.; Mazzoni, A. Real-time geophysical applications with Android GNSS raw measurements. Remote Sens. 2019, 11, 2113. [Google Scholar] [CrossRef]
- Muliyati, D.; Julianti, V.; Mihada, R.; Karentia, A. Augmented reality application design on geophysical encyclopedia for Android smartphones. AIP Conf. Proc. 2021, 2320, 020033. [Google Scholar]
- Wen, S.S.; Tang, J.T.; Pei, J.; Jiang, Q.Y.; Zhang, B.M.; Li, G. Research and implementation of wide field electromagnetic receiver acquisition monitoring software based on android platform. Prog. Geophys. 2018, 33, 866–873. [Google Scholar]
- Liu, S.Y.; Zhang, Q.S.; Zhang, Q.M.; Qiao, S.Q.; Yan, S.C.; Li, W.H.; Guo, F.; Wang, Y.Q.; Heng, X.; Ke, Z.; et al. Research and implementation of distributed wireless microseismic acquisition station placement and monitoring software based on Android platform. Prog. Geophys. 2020, 35, 331–338. [Google Scholar]
- Zhang, Q.; Qiao, S.; Zhang, Q.; Liu, S. Design and implementation of the detection software of a wireless microseismic acquisition station based on the Android platform. Geosci. Instrum. Methods Data Syst. 2021, 10, 91–100. [Google Scholar] [CrossRef]
- Li, B.; Xu, Q.; Liu, T.X.; Cheng, Q.; Tang, M.G.; Zheng, G.; Lei, H. Development of data acquisition software for electromagnetic instruments in landslide detection. Appl. Geophys. 2024, 21, 133–146. [Google Scholar] [CrossRef]
- Peng, X.; Chun, S.; Su, B.; Chen, R.; Hou, S.; Xu, C.; Zhang, H. Design of Three-Dimensional Electrical Impedance Tomography System for Rock Samples. Appl. Sci. 2024, 14, 1671. [Google Scholar] [CrossRef]
- Lü, Q.; Zhang, X.; Tang, J.; Jin, S.; Liang, L.; Niu, J.; Zhao, J. Review on advancement in technology and equipment of geophysical exploration for metallic deposits in China. Chin. J. Geophys. 2019, 62, 3629–3664. [Google Scholar]
- Liu, H.F.; Luo, Z.C.; Hu, Z.K.; Yang, S.Q.; Tu, L.C.; Zhou, Z.B.; Kraft, M. A review of high-performance MEMS sensors for resource exploration and geophysical applications. Pet. Sci. 2022, 19, 2631–2648. [Google Scholar] [CrossRef]
- Chun, S.; Wang, F.; Chen, R.; Shen, R.; Peng, X.; Xu, C.; Yin, H. Development of transient electromagnetic transmitter based on SiC MOSFET for high-resolution near-surface. Prog. Geophys. 2025, 40, 358–371. [Google Scholar]
- Dimililer, K.; Dindar, H.; Al-Turjman, F. Deep learning, machine learning and internet of things in geophysical engineering applications: An overview. Microprocess. Microsyst. 2021, 80, 103613. [Google Scholar] [CrossRef]
- Madakam, S.; Ramaswamy, R.; Tripathi, S. Internet of Things (IoT): A literature review. J. Comput. Commun. 2015, 3, 164–173. [Google Scholar] [CrossRef]
- Gokhale, P.; Bhat, O.; Bhat, S. Introduction to IOT. Int. Adv. Res. J. Sci. Eng. Technol. 2018, 5, 41–44. [Google Scholar]
- Aziz, T.; Koo, I. A Comprehensive Review of Indoor Localization Techniques and Applications in Various Sectors. Appl. Sci. 2025, 15, 1544. [Google Scholar] [CrossRef]
- Kim, G.; Shin, J.; Won, J.; Park, J. Cloud-Based Internet-of-Things System for Long-Term Bridge Bearing Monitoring Using Computer Vision. Appl. Sci. 2025, 15, 1622. [Google Scholar] [CrossRef]
- Zohourian, A.; Dadkhah, S.; Neto, E.C.P.; Mahdikhani, H.; Danso, P.K.; Molyneaux, H.; Ghorbani, A.A. IoT Zigbee device security: A comprehensive review. Internet Things 2023, 22, 100791. [Google Scholar] [CrossRef]
- Aldin, H.N.S.; Ghods, M.R.; Nayebipour, F.; Torshiz, M.N. A comprehensive review of energy harvesting and routing strategies for IoT sensors sustainability and communication technology. Sens. Int. 2024, 5, 100258. [Google Scholar] [CrossRef]
- Li, W.; Zhang, Q.; Zhang, Q.; Guo, F.; Qiao, S.; Liu, S.; Heng, X. Development of a distributed hybrid seismic–electrical data acquisition system based on the Narrowband Internet of Things (NB-IoT) technology. Geosci. Instrum. Methods Data Syst. 2019, 8, 177–186. [Google Scholar] [CrossRef]
- Zhou, K.; Zhang, Q.; Liu, Y.; Wu, Z.; Lin, Z.; Zhao, B.; Li, P. Internet-of-things-based four-dimensional high-density electrical instrument for geophysical prospecting. Geosci. Instrum. Methods Data Syst. 2021, 10, 141–151. [Google Scholar] [CrossRef]
- Unogwu, O.J.; Hiran, K.K.; Doshi, R.; Dadhich, M. Integrating InSAR, GNSS, IoT, 5G, and Cybersecurity for Earthquakes/Tremor Monitoring and Forecasting in Abuja, Nigeria. In 5G, Cybersecurity and Privacy in Developing Countries; River Publishers: Aalborg, Denmark, 2022; pp. 195–209. [Google Scholar]
- Indukala, P.K.; Gosh, U.G.; Ramesh, M.V. IoT-Driven Microseismic Sensing System and Monitoring Platform for Landslide Detection. IEEE Access 2024, 12, 97787–97805. [Google Scholar] [CrossRef]
- Aleem, A.; Ryan Sprott, C. Let me in the cloud: Analysis of the benefit and risk assessment of cloud platform. J. Financ. Crime 2012, 20, 6–24. [Google Scholar] [CrossRef]
- Ray, P.P. A survey of IoT cloud platforms. Future Comput. Inform. J. 2016, 1, 35–46. [Google Scholar] [CrossRef]
- Gvishiani, A.D.; Dobrovolsky, M.N.; Dzeranov, B.V.; Dzeboev, B.A. Big data in geophysics and other earth sciences. Izv. Phys. Solid. Earth 2022, 58, 1–29. [Google Scholar] [CrossRef]
- Serrano, N.; Gallardo, G.; Hernantes, J. Infrastructure as a service and cloud technologies. IEEE Softw. 2015, 32, 30–36. [Google Scholar] [CrossRef]
- Versteeg, R.; Johnson, D.; Henrie, A.; Johnson, T. Cloud based electrical geophysical monitoring. In Proceedings of the Symposium on the Application of Geophysics to Engineering and Environmental Problems 2014, Boston, MA, USA, 16–20 March 2014; Society of Exploration Geophysicists and Environment and Engineering Geophysical Society: Houston, TX, USA, 2014; pp. 149–154. [Google Scholar]
- Müller, R.D.; Qin, X.; Sandwell, D.T.; Dutkiewicz, A.; Williams, S.E.; Flament, N.; Seton, M. The GPlates portal: Cloud-based interactive 3D visualization of global geophysical and geological data in a web browser. PLoS ONE 2016, 11, e0150883. [Google Scholar] [CrossRef]
- Strack, K.M.; Martinez, Y.L.; Passalacqua, H.; Xu, X. Cloud-Based Array Electromagnetics Contributing to Zero Carbon Footprint. In Proceedings of the Offshore Technology Conference (OTC 2022), Houston, TX, USA, 2–5 May 2022. D021S028R004. [Google Scholar]
- Zhu, W.; Hou, A.B.; Yang, R.; Datta, A.; Mousavi, S.M.; Ellsworth, W.L.; Beroza, G.C. QuakeFlow: A scalable machine-learning-based earthquake monitoring workflow with cloud computing. Geophys. J. Int. 2023, 232, 684–693. [Google Scholar] [CrossRef]
- Huebert, J.; Eaton, E.; Beggan, C.D. Developing a New Ground Electric Field Model for the UK Based on Long-Period Magnetotelluric Data for the SWIMMR N4 (SAGE) Framework; British Geological Survey: Edinburgh, UK, 2024. [Google Scholar]
- Park, C.H.; Shim, B.O.; Park, J.W. Open-source IoT monitoring system of a shallow geothermal system for heating and cooling year-round in Korea. Energy 2022, 250, 123782. [Google Scholar] [CrossRef]
- Prauzek, M.; Kucova, T.; Konecny, J.; Adamikova, M.; Gaiova, K.; Mikus, M.; Koziorek, J. Iot sensor challenges for geothermal energy installations monitoring: A survey. Sensors 2023, 23, 5577. [Google Scholar] [CrossRef] [PubMed]
- Dasmen, R.N.; Saputra, M.A. The IOT-Based Hydrogen Sulfide Monitoring at PT. Pertamina Geothermal Energy on Lumut Balai Area. Tech-E 2023, 7, 32–42. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CPU | Internal Storage | Peak Bandwidth | Operating System |
|---|---|---|---|
| Two-core | 4 GiB | 5 Mbit/s | CentOS 8.2 64 bit |
| Concurrency | Average Delay (ms) | Average RPS | Success Rate |
|---|---|---|---|
| 20 | 7.1 | 2572.25 | 99.99% |
| 100 | 31.62 | 2813.21 | 99.64% |
| 200 | 65.89 | 2715.02 | 99.11% |
| 500 | 174.56 | 2614.70 | 97.97% |
| Device | Rxy | Ryx | Pxy | Pyx |
|---|---|---|---|---|
| MTU-5A | 13.46 | 16.72 | 1.75 | 2.18 |
| CMT | 13.46 | 16.72 | 1.75 | 2.18 |
| Number of Points | Minimum Time | Maximum Time | Error Rate |
|---|---|---|---|
| 20 | 6 h | 20 h | 0% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, Q.; Sun, W.; Chen, R.; Mi, X.; Yao, H. A Magnetotelluric Signal Acquisition and Monitoring System Based on a Cloud Platform. Appl. Sci. 2025, 15, 5598. https://doi.org/10.3390/app15105598
Luo Q, Sun W, Chen R, Mi X, Yao H. A Magnetotelluric Signal Acquisition and Monitoring System Based on a Cloud Platform. Applied Sciences. 2025; 15(10):5598. https://doi.org/10.3390/app15105598
Chicago/Turabian StyleLuo, Qi, Weibin Sun, Rujun Chen, Xiaoli Mi, and Hongchun Yao. 2025. "A Magnetotelluric Signal Acquisition and Monitoring System Based on a Cloud Platform" Applied Sciences 15, no. 10: 5598. https://doi.org/10.3390/app15105598
APA StyleLuo, Q., Sun, W., Chen, R., Mi, X., & Yao, H. (2025). A Magnetotelluric Signal Acquisition and Monitoring System Based on a Cloud Platform. Applied Sciences, 15(10), 5598. https://doi.org/10.3390/app15105598