1. Introduction
An increasing number of renewable energy sources (RESs) represented by wind and photovoltaic power are connected to the power grid. They are gradually replacing synchronous generators (SGs) and emerging as the predominant power sources in the renewable energy power system [
1,
2]. RESs are connected to the power system through power electronic devices and are unable to provide inherent inertia [
3,
4]. Moreover, the power output of RESs can be influenced by various factors, such as weather conditions, geographical locations, and control strategies [
5]. Consequently, in the context of power disturbance events, the issues of fluctuations and uncertainties within the power system become more conspicuous, thereby affecting the frequency regulation capabilities of RESs, which are characterized by variations over time and across different locations [
6]. Due to the low inertia and uncertainties of the power system, the frequency response of the power system deteriorates, the frequency regulation ability of RES exhibits distribution characteristics [
7], and the increased rate of change of frequency (RoCoF) at some nodes poses a challenge to the secure operation of the grid.
Compared with SGs, power electronic devices can achieve power control within a smaller time scale [
8]. They have broad application prospects in RESs. At the same time, with the features of bidirectional transmission and rapid response [
9], an energy storage system (ESS) is likely to exert a significant influence in the renewable energy power system. Therefore, ESSs can serve as an effective means to improve the stable operation of the power grid. The control methods used in ESSs can be categorized into grid-following (GFL) control and grid-forming (GFM) control [
10,
11,
12]. Regarding the improvement of the secure operation capacity of the power system, techniques of applying GFM technology within low-inertia power systems have garnered substantial research attention.
Many efforts have already been made by scholars in researching the evaluation methods of the inertia distribution characteristics of power systems. The authors of [
13] propose a method to quantify estimation frequency characteristics to reflect the differences in the inertia support capability of various nodes. The frequency responses of each node in the power system under various inertia distribution characteristics were analyzed via simulation in [
14]. In large-scale power systems, a variety of inertia distribution indexes are proposed to describe the impact of inertia on the frequency stability of the power systems [
15,
16]. Quantitative assessment of power system inertia allocation can be made through trajectory analysis of electromechanical disturbance propagation [
17].
In recent years, with the continuous development of GFM control strategies, extensive research has been conducted on the application of grid-forming control energy storage systems (GFM-ESSs) to enhance the secure and stable operation of renewable energy power systems. GFM control can effectively enhance the stability of the power system and is expected to solve the problem that the replacement of SGs by RESs leads to a significant decline in the inertia of the power system [
18,
19]. An RES production forecasting method using artificial neural networks was proposed in [
20]. This method exhibits a lower mean average prediction error and provides more accurate evaluation results. Regarding the configuration method of GFM-ESSs, the authors in [
21] establish a frequency response model of the wind-energy storage system and achieve the allocation of virtual inertia between wind power and ESSs according to the inertia requirements of the system. A site selection and capacity optimization method was designed from the perspective of reactive-voltage sensitivity calculation in [
22]. Based on multiple time scales, a plant siting and capacity optimization method for GFM-ESSs that can enhance the inertia of the power system and the cycle life of ESSs was proposed in [
23]. Considering various scenarios of major power outages, a parallel restoration strategy utilizing the A* algorithm was proposed in [
24], which can provide reliable power supply to consumers.
While GFM-ESSs have the ability to provide inertia to a power system, the configuration cost of GFM-ESSs is notably higher compared with grid-following energy storage systems (GFL-ESSs). Furthermore, GFM-ESSs share similar functions with GFL-ESSs in terms of power balancing and peak load regulation. Most of the existing studies focus on the capacity planning or the optimization of control strategies for a single type of ESS, making it a critical issue to study the capacity ratio between GFM-ESSs and GFL-ESSs.
Inspired by the above-mentioned research, a hybrid optimization method is proposed for the coupled placement and capacity allocation of GFM-ESS and GFL-ESS construction. This method, which is applicable to the field of power system planning, addresses the problem of utilizing the minimum amount of GFM-ESSs to solve the issue of insufficient inertia support capability in power systems, thereby enabling the stable operation of a renewable energy power system. The main advancements are delineated as follows:
Based on the network equations of a power system, this study presents a method for evaluating the inertia support capability of generators in the power system. A virtual inertia emulation framework is subsequently formulated for GFM-ESSs, explicitly integrating frequency dynamics characteristics. Taking the integration of RESs into account, the frequency relationship between the generators and the network nodes is deduced, and according to the frequency relationship, the inertia distribution characteristics of the power system are characterized by using the node frequency regulation coefficient. Furthermore, a method for the optimization configuration of ESSs considering the inertia distribution characteristics of the power system is proposed. This method, which can quantify the configuration requirements of GFM-ESSs, aims to enhance the inertia support capacity of generator nodes and reduce the operation cost of the power system. In summary, the major contributions of this study are mainly reflected in two aspects: (1) the method for evaluating the inertia distribution characteristics considering the grid structure of a power system and (2) an optimization configuration method for site selection and capacity determination of GFL-ESSs and GFM-ESSs considering inertia distribution characteristics.
The remainder of this study is structured as follows:
Section 2 assesses the inertia support capability of different generator nodes in the power system using network equations and introduces a method to characterize the distribution of inertia resources in the system.
Section 3 evaluates the demand for GFM-ESSs in the power system and designs an optimization configuration method for ESSs based on multiple operation scenarios.
Section 4 verifies the effectiveness of the evaluation method and the proposed configuration method on the IEEE 9-bus system and IEEE 39-bus system, respectively.
Section 5 provides a summary of this study.
4. Case Study
In this study, the proposed optimization configuration method for ESSs mainly consists of two parts. Firstly, a method is presented for deriving frequency stability based on the NFDC, which clearly indicates the distribution of inertia resources in the power system such as SGs and GFM-ESSs. Secondly, an optimization configuration method for ESSs considering the distribution of inertia resources is proposed. The focus of this study lies in identifying the weak links in the inertia level of the power system based on the NFDC and quantifying the inertia resource requirements of different nodes in the power system. This study verifies the effectiveness of the proposed stability index and analyzes the changes in the inertia distribution characteristics of the nodes in the power system under different operating scenarios. Aiming to minimize both the operation cost of generators in the power system and the construction cost of ESSs, an optimization configuration method for GFL-ESSs and GFM-ESSs has been devised.
The NFDC evaluation method and the optimization configuration model utilize the CPLEX solver to conduct effective solution analysis. The configuration model is formulated as a linear programming model, and both the power flow constraints and inertia constraints of the power system have been linearized to ensure the accuracy and efficiency of the model solution.
4.1. Analysis of Inertia Distribution Characteristics
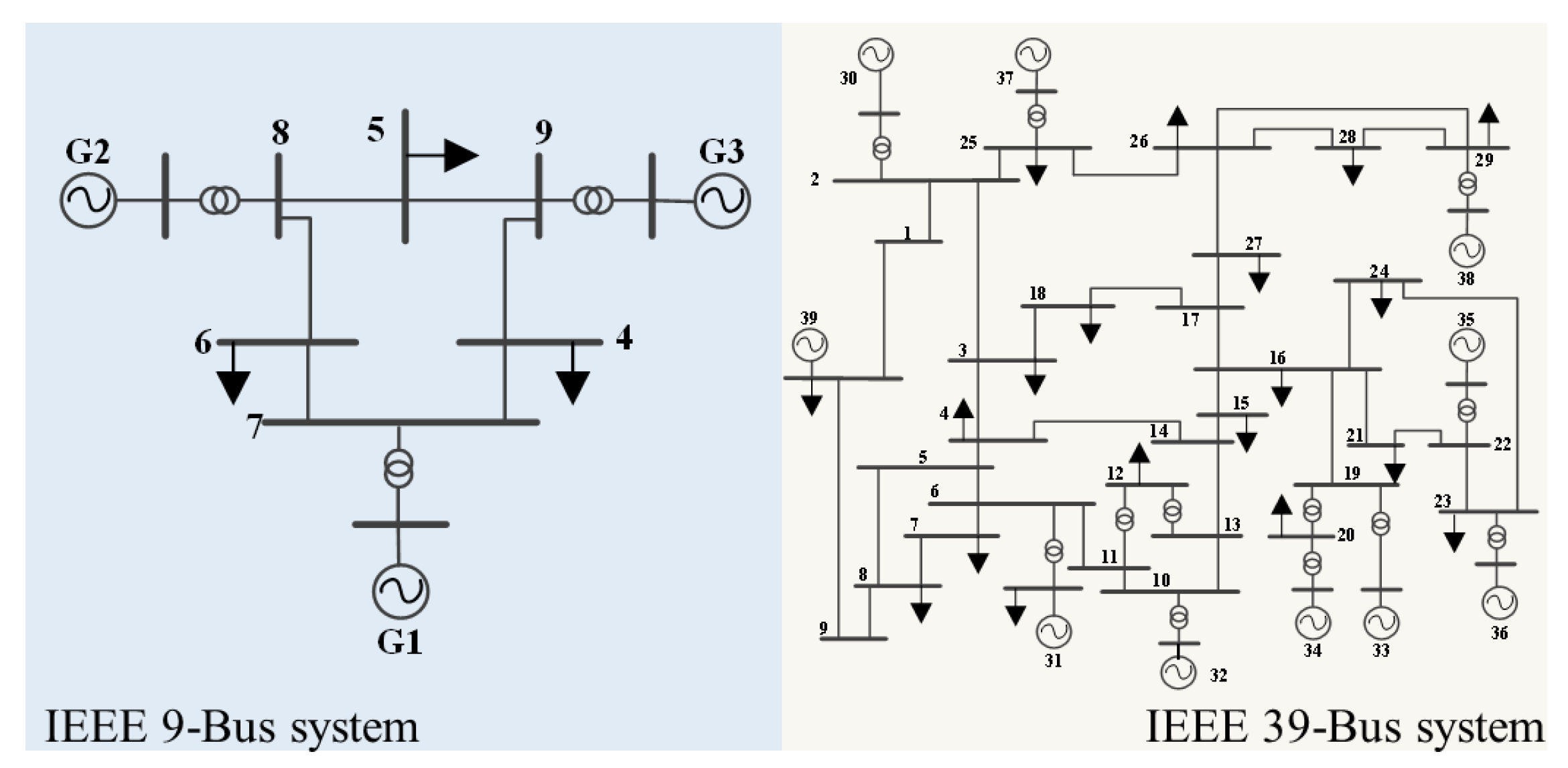
Based on the structural configurations of the IEEE 9-bus and 39-bus systems, the inertia levels of each node in the systems are evaluated by using the NFDC. The simulation model of the systems is shown in
Figure 3. The IEEE 9-bus system contains 3 generators, 3 loads, and 9 branches, while the IEEE 39-bus system contains 10 generators, 21 loads, and 46 branches.
Based on the simulation models of the IEEE 9-bus system and 39-bus system, the inertia level of each node in the systems can be evaluated by the value of the NFDC. The parameters of the generators in the system, including the inertia coefficient, are shown in
Table 1. WF indicates that the generator type of the unit is a wind farm.
Based on the NFDC, the inertia support capability of various nodes and the distribution of inertia resources in the power system can be effectively represented.
Table 2 shows the values of the NFDC at each node in the IEEE 9-bus system.
G represents the generation nodes in the system and R refers to the network or load nodes. According to the evaluation results, the NFDC is a complex number, with the real part being much larger than the imaginary part. This is because the active power loss in the power system is primarily reflected in the branch impedance, which manifests as a larger real part in the NFDC. Therefore, when conducting index evaluations subsequently, the real part of the NFDC will be used as the basis for evaluating the inertia levels of the nodes.
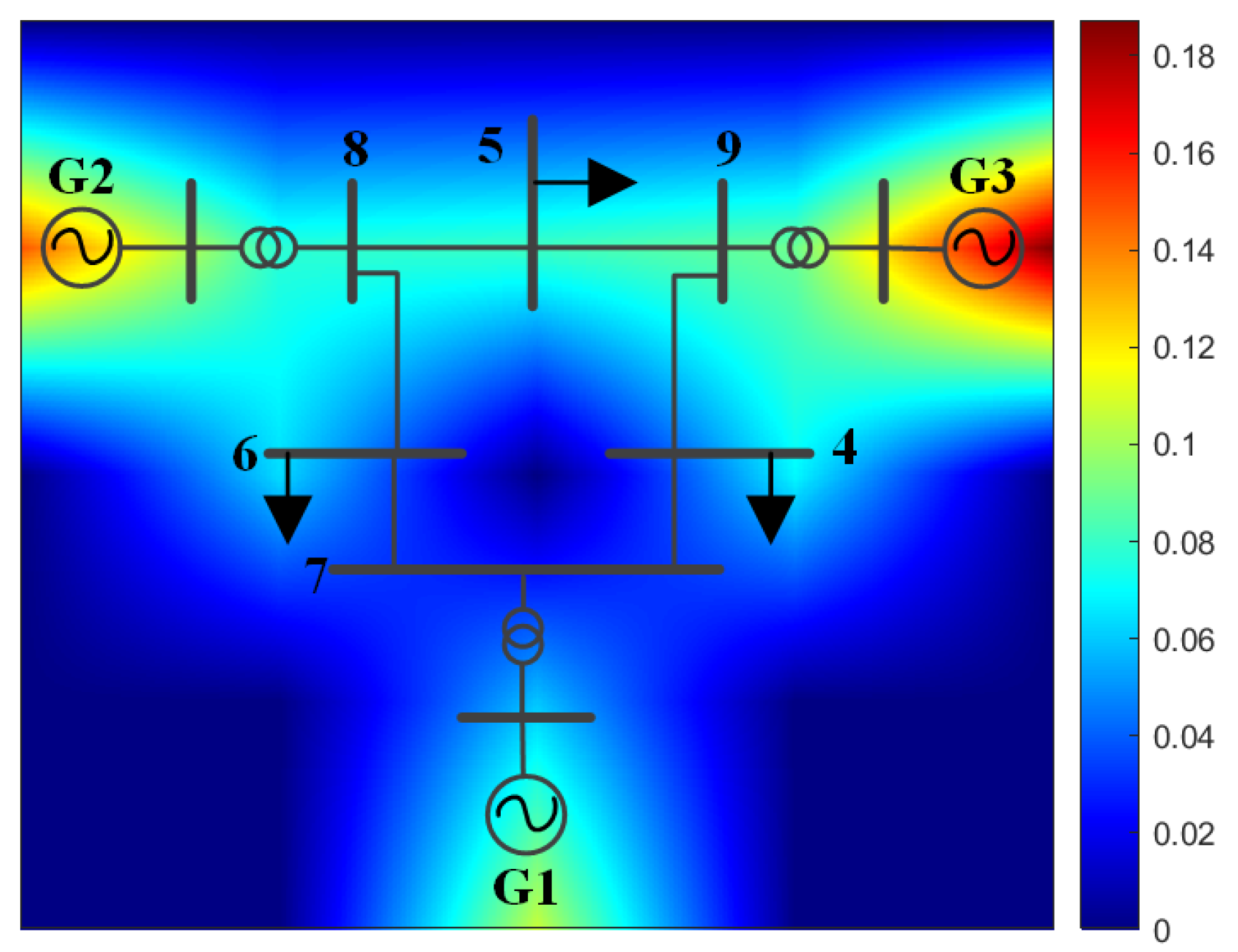
As shown in
Figure 4, the inertia levels of each node in IEEE 9-bus system are presented in the form of a heat map. This approach allows for a more intuitive understanding of the inertia distribution characteristics of the system.
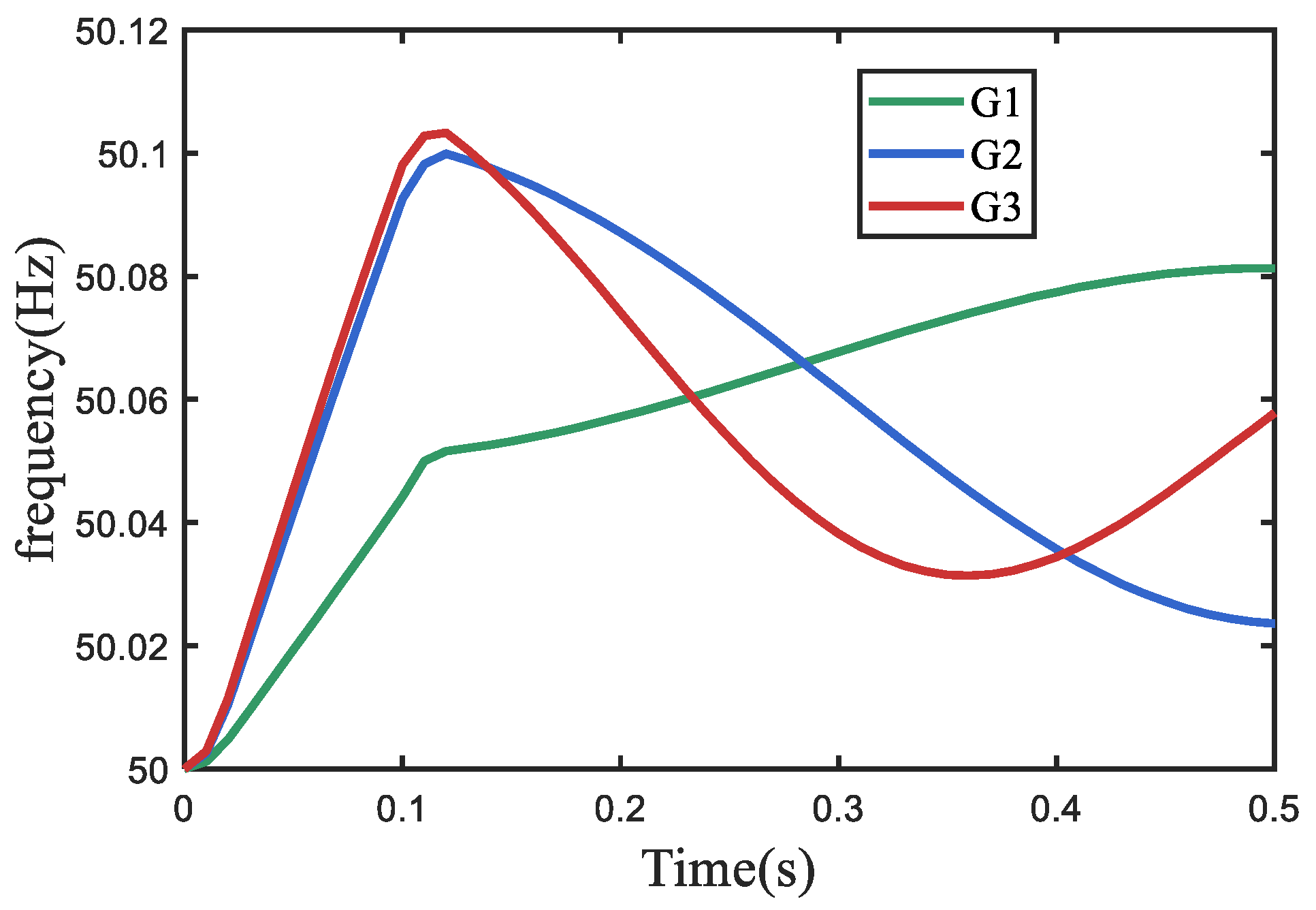
The power disturbance in the system is simulated by setting a single-phase short-circuit fault at bus R6 in IEEE 9-bus system. The frequency dynamic characteristics of three generators in IEEE 9-bus system can be observed through time-domain simulation. The simulation results are shown in
Figure 5. It can be observed that during the occurrence of a power disturbance event, the frequency variation of G3 is the most pronounced, whereas that of G1 is the least significant. This is consistent with the situation represented by the NFDC, indicating that the NFDC can accurately reflect the inertia level of the nodes in the power system.
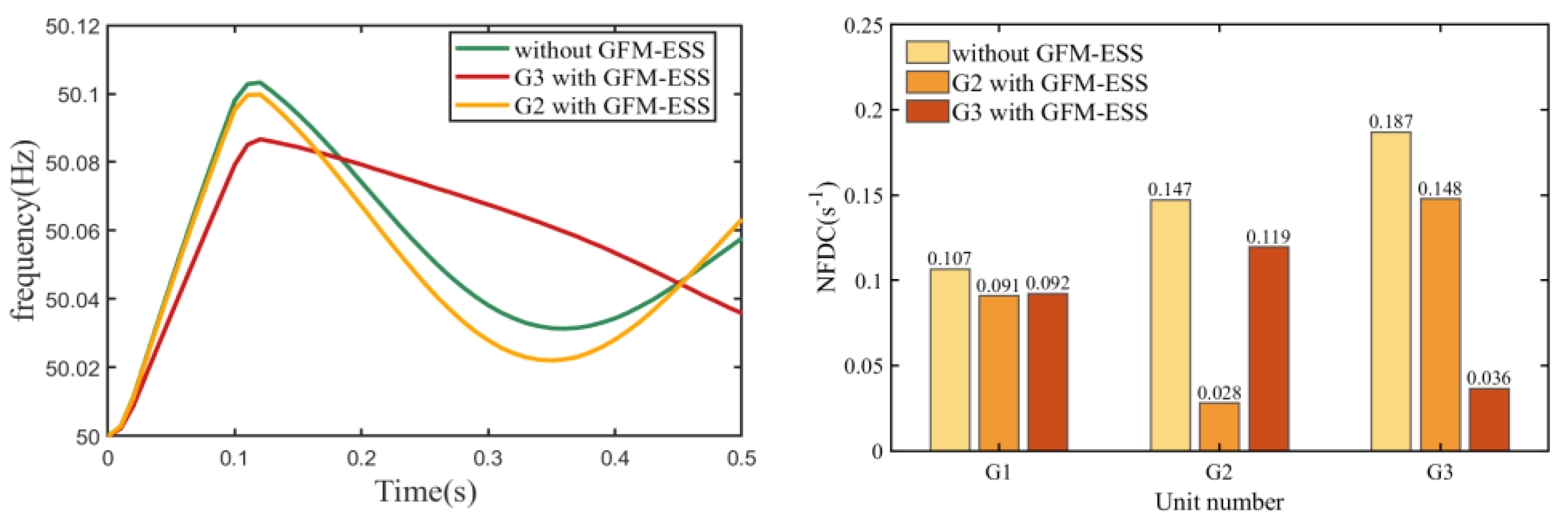
To observe the frequency characteristics of the three generators and the value of the NFDC, the GFM-ESS which has a nominal capacity of 30MW is implemented in the IEEE 9-bus system. The comparative results are shown in
Figure 6.
According to the simulation results, after configuring the GFM-ESS, the RoCoF of each generator decreases, with the most significant decrease observed at the unit where the GFM-ESS is installed. The decrease in RoCoF is also reflected in the change in the NFDC value, indicating a positive correlation between the NFDC and RoCoF.
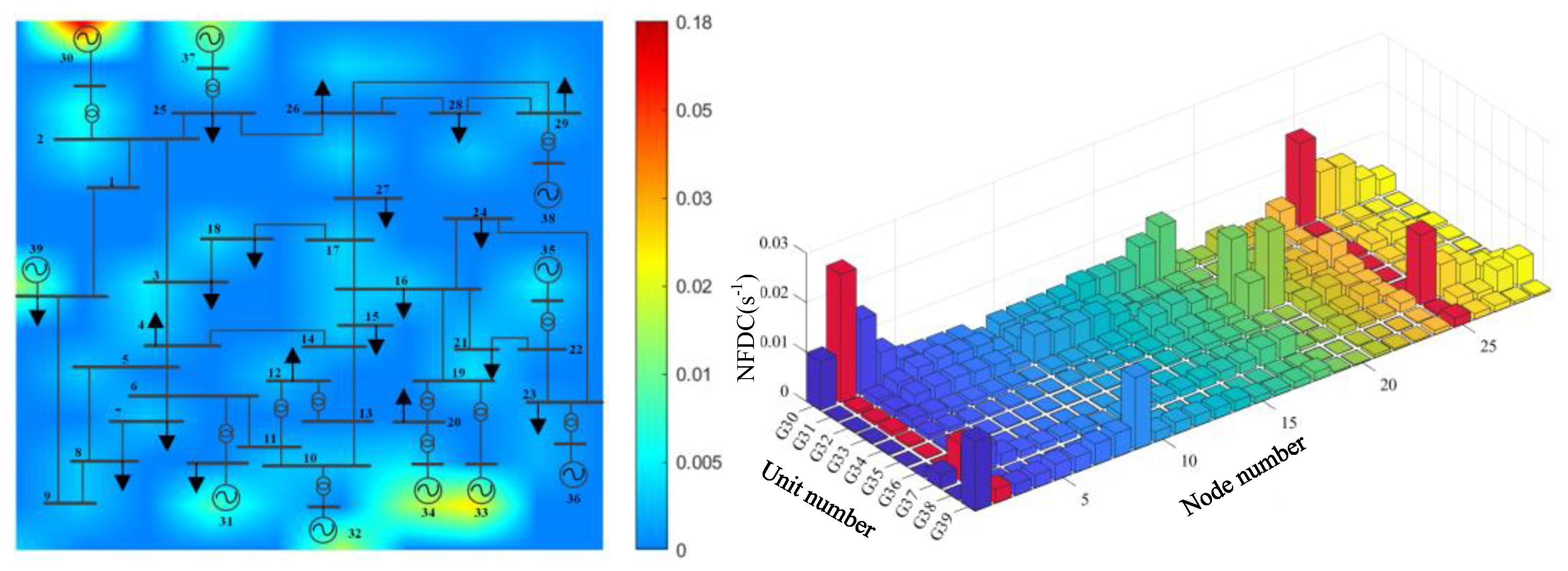
Based on the same method, the inertia distribution characteristics of the IEEE 39-bus system were evaluated. The NFDC evaluation results are shown in
Figure 7.
According to the evaluation results, G30 belongs to the weak link in terms of the system inertia level, and G33 and G34 also have the risk of losing stability. When configuring the ESS, these locations can be given priority consideration.
4.2. Optimization Results Analysis
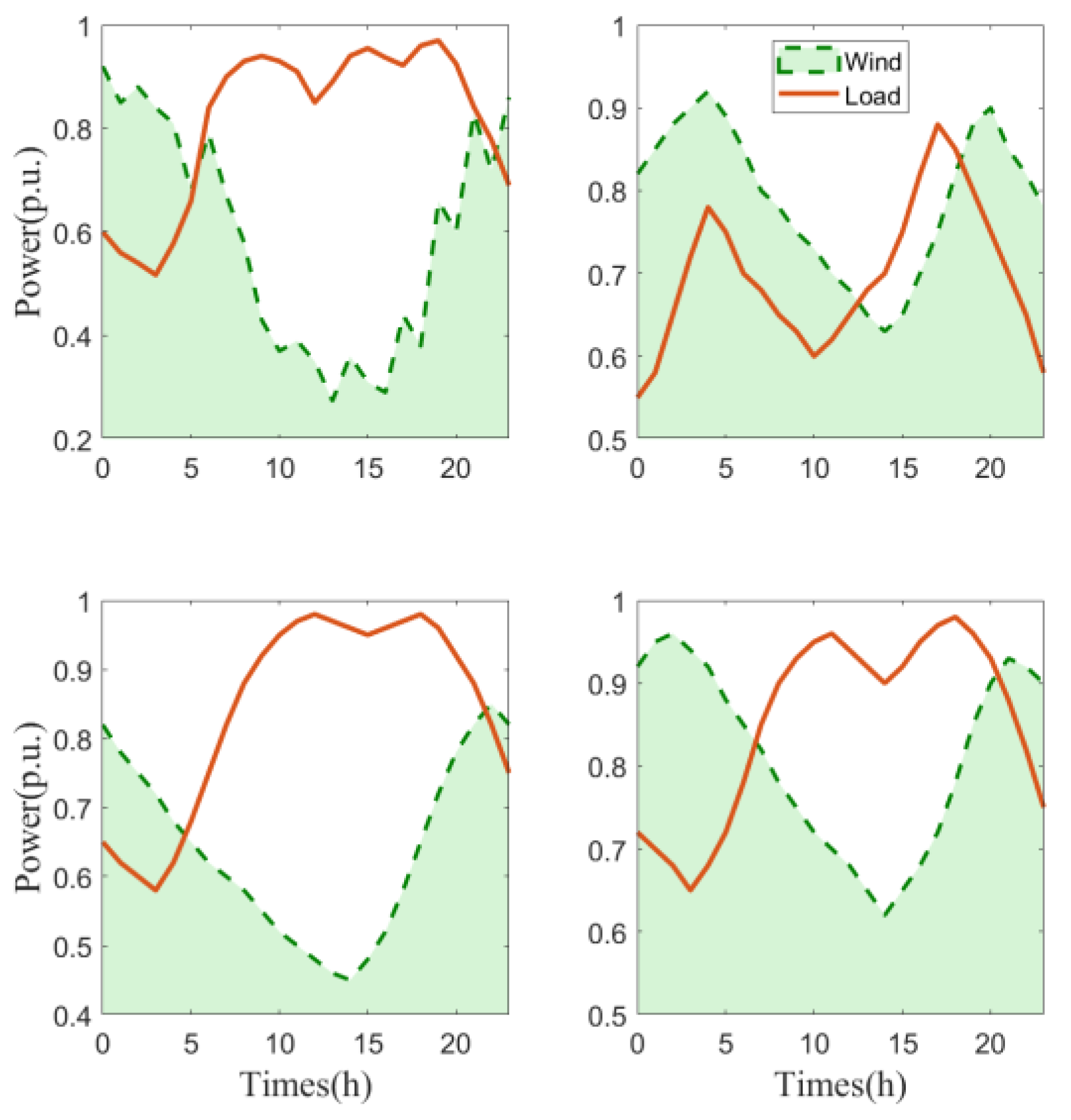
RESs and loads have different power curves in different seasons. In order to explore the inertia distribution characteristics of a power system during different time periods, this study considers four normalized power scenarios of wind and load, as shown in
Figure 8, aiming to configure the GFM-ESS and GFL-ESS in the most economical way. This will help improve the utilization efficiency of RESs in the power system and enhance the inertia distribution characteristics of the power system.
G32 to G34 in the 39-bus system are designated as wind power. The predicted power output of the wind power and the power consumption of the load nodes are constrained in accordance with the power curves depicted in
Figure 8.
The four typical power scenarios in
Figure 8 include the power characteristics of summer, winter, and transitional seasons. In winter, the wind power output is generally higher throughout the day, while in summer, it is relatively lower. In transitional seasons, wind power exhibits higher levels in the early morning and evening, with lower output during midday. Regarding load characteristics, winter shows higher power consumption in the early morning and evening, while the peak load consumption in summer occurs around midday.
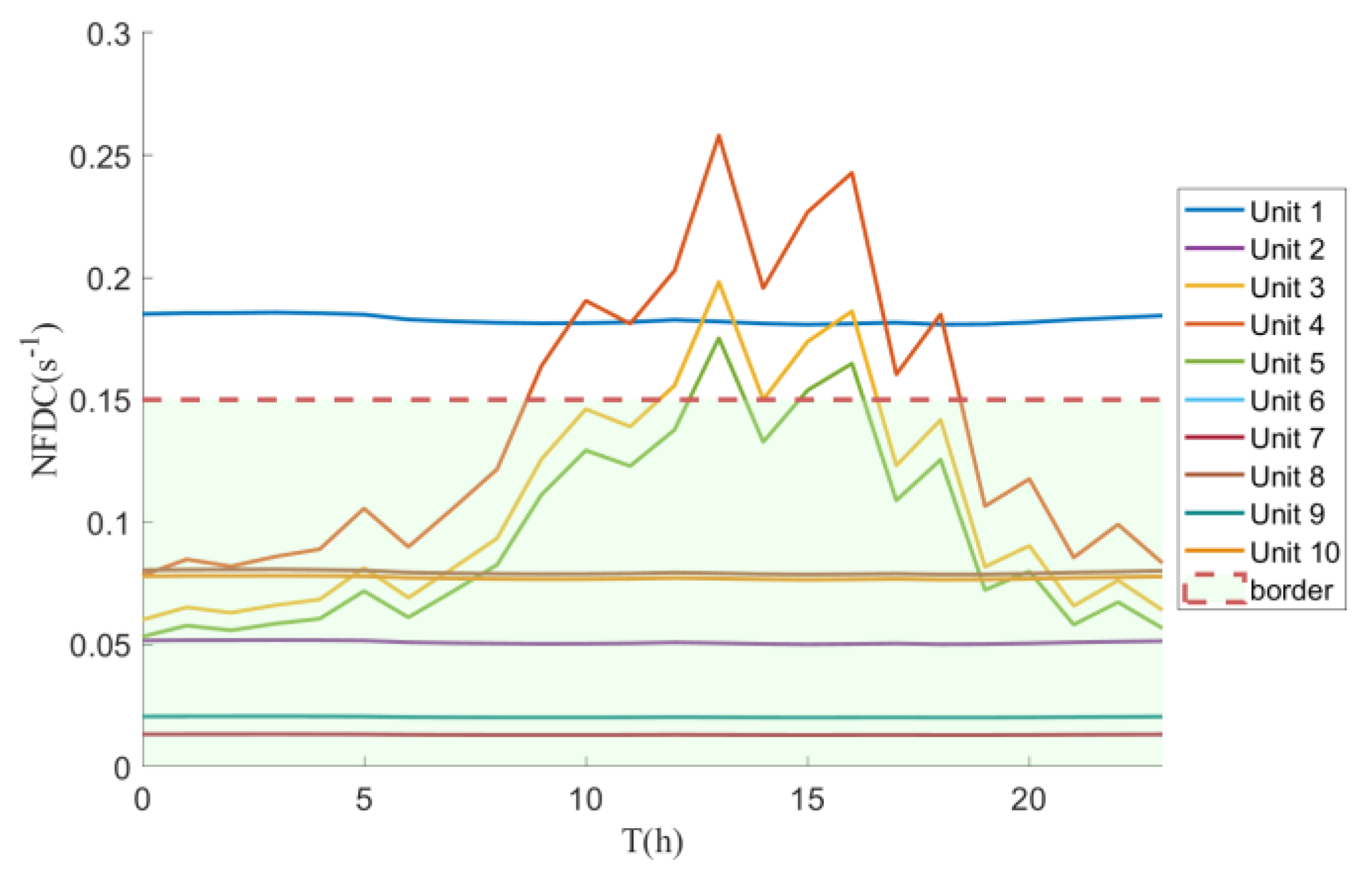
The value of the NFDC can represent the strength of the inertia support capability of each node in the power system. The variation in the NFDC of each generator in scenario 1 is shown in
Figure 9.
Based on the simulation results, it can be observed that as the active power output changes, the inertia level of wind power will change significantly. At the same time, the inertia support capability of SGs is hardly affected by their active power output. This is because the inertia response characteristics of SGs primarily rely on their rotational inertia. In contrast, wind power is limited by its control strategy and the characteristics of power electronic devices, which makes it difficult for its active power to be fully released.
The relevant parameters of the generator and ESS are presented in
Table 3 and
Table 4, including the power generation cost coefficient, RES penalty coefficient, and cost coefficient of the ESS. By outputting active power, the GFM-ESS can provide inertia support capability, which is represented by the equivalent inertia constant (EIC).
The optimization configuration results of ESS, calculated under various scenarios, are presented in
Table 5. The system inertia demand, the installation locations of the ESSs, and the operating costs of the generators are solved based on the CPLEX solver (version 12.10.0.0). The optimization model aims to minimize the total system operating cost while ensuring that the inertia levels at each node meet the standards, and solves for the configuration, location, capacity, and type of ESS.
The capacity demand of the GFM-ESS is quantified according to the value of the NFDC, and the total configured capacity of ESSs can be calculated based on the optimization configuration method. When the total configuration capacity of ESSs is less than the required capacity of the GFM-ESS, all available resources of the ESSs will be prioritized for the construction of the GFM-ESS. Since the configuration cost of the GFM-ESS is relatively high, the GFL-ESS will be additionally configured when the total configured capacity of the ESSs is larger than the capacity requirement of the GFM-ESS. As a result, the power system can not only ensure its own stable operation but can also save the configuration cost of the ESS.
Based on the NFDC, it is known that the inertia level of G30 is relatively low, for which the GFM-ESS should be configured. G32 and G33 belong to wind power, and the configuration of the GFM-ESS is influenced by the power output of the wind power.
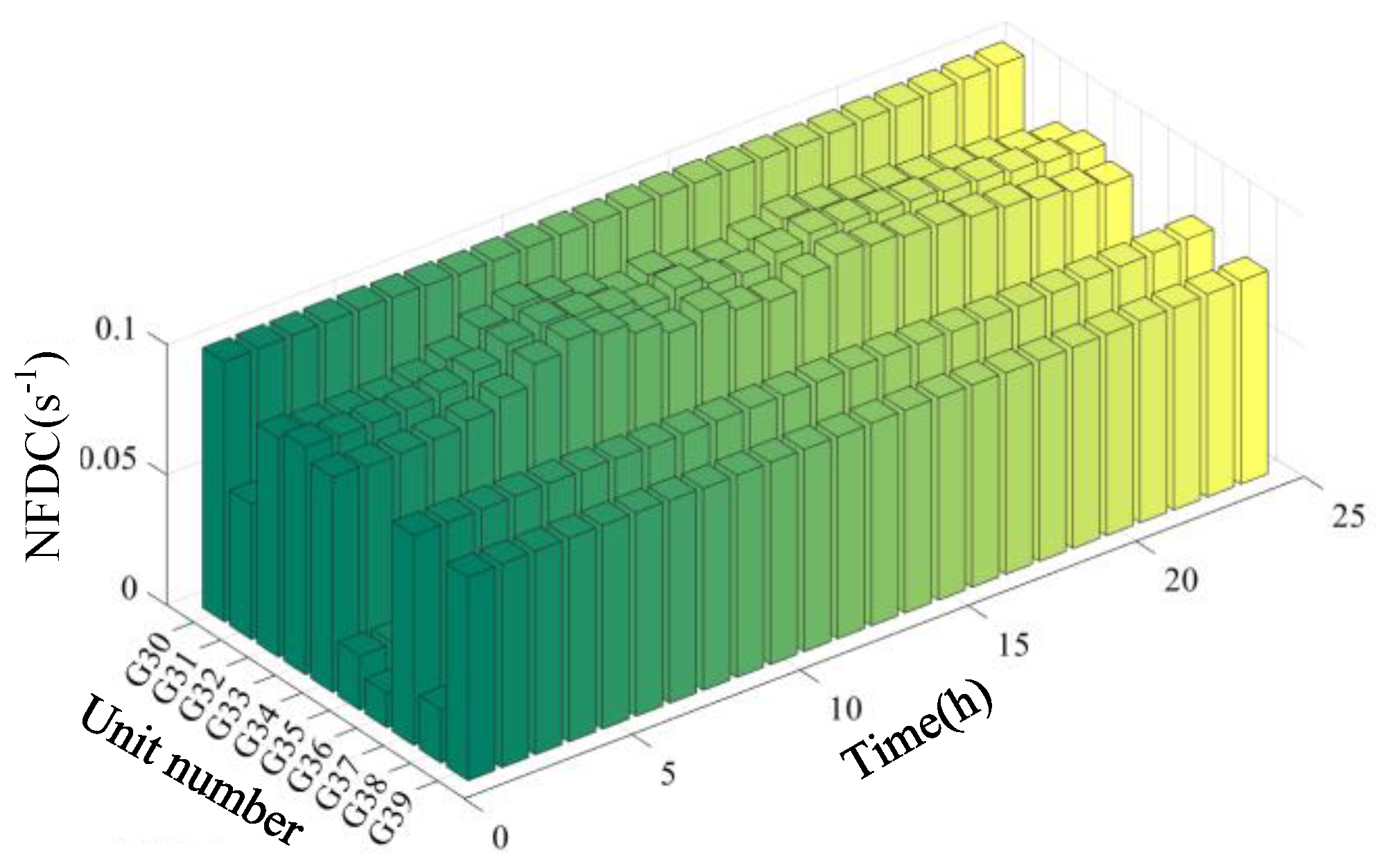
Before configuring the ESS, the inertia levels of various nodes in the system are relatively low. As shown in the system inertia distribution in
Figure 8, the G30 node exhibits the weakest inertia support capability, where its value of NFDC is 0.18. As shown in
Figure 9, with changes in the active power output of RESs, the value of the NFDC at certain generators may increase to around 0.25. This will weaken the inertia support capability of RESs, making the power system more prone to instability risks. Based on the energy storage allocation scheme of Scenario 1, a GFM-ESS can be constructed, and the variation in the NFDC as shown in
Figure 10 can be described.
After the ESS is configured, the NFDC of all generators in 39-bus system is less than 0.1. At the same time, the inertia distribution characteristics of the power system have also been enhanced. Moreover, the distribution of the inertia resources of the power system has become more balanced.
In summary, this section first validates the feasibility of the value of the NFDC in assessing the inertia distribution of the power system. Subsequently, an optimization configuration method for the GFL-ESS and GFM-ESS is devised by integrating typical wind-load operation scenarios. Finally, the effectiveness of the proposed configuration method is verified through the improved IEEE 39-bus system. These findings can be used by stakeholders and policy makers to promote the full exploitation of the GFM-ESS in renewable energy power systems.
5. Discussions
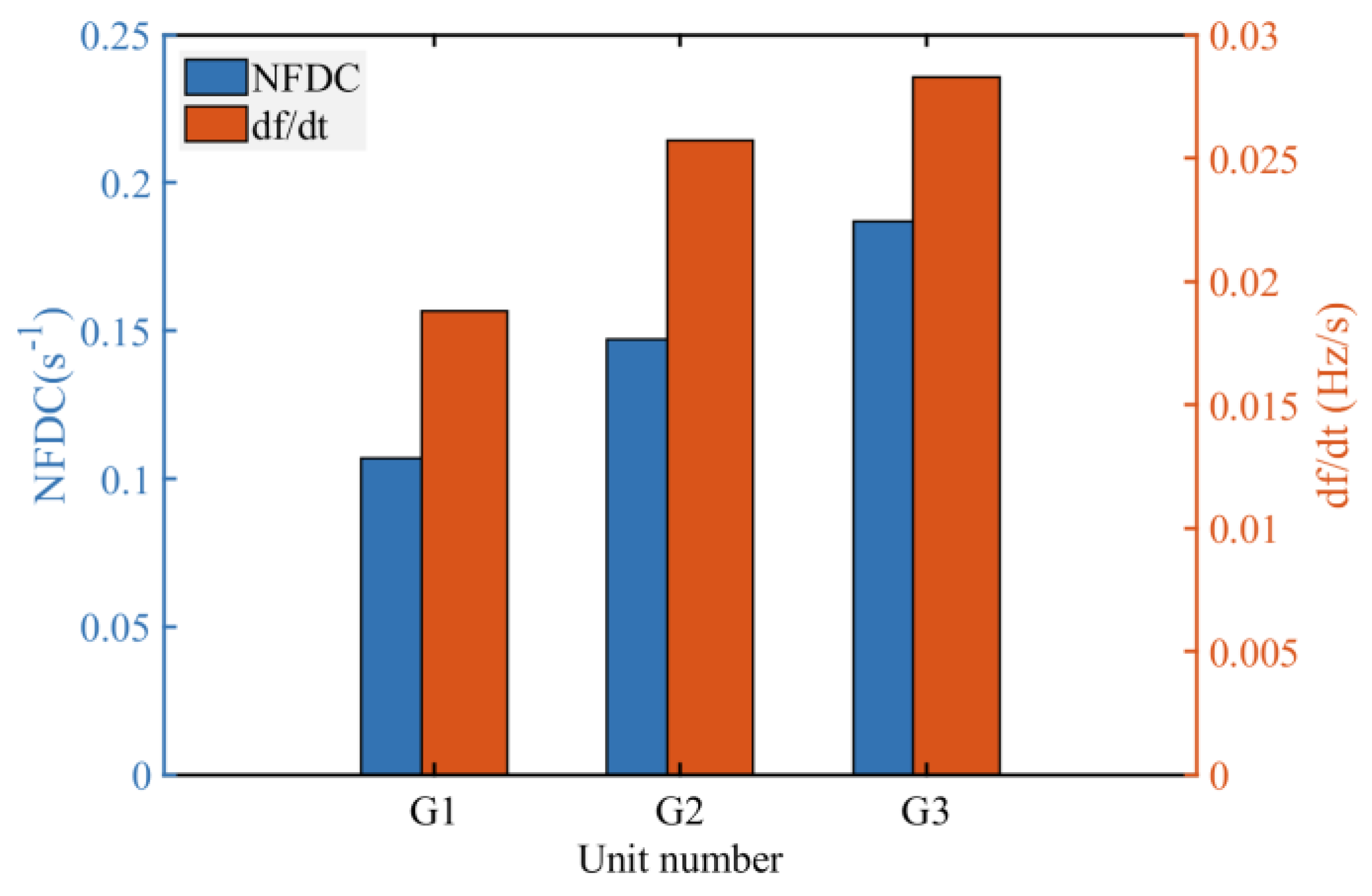
The RoCoF of three generators in the IEEE 9-bus system was detected using the NFDC evaluation method and the power system inertia estimation method proposed in [
26], respectively. A single-phase short-circuit fault was simulated at bus R6 as the power disturbance event. The RoCoF of the generator in [
28] was expressed by Equation (28). The comparative evaluation results of the two methods are presented in
Figure 11.
The simulation results indicate that the inertia estimation method proposed in [
26] and the method presented in this paper yield consistent results. In the IEEE 9-bus system, the inertia support capacity of G3 is relatively weak.
Compared to the traditional estimation method, the method proposed in this paper does not require the active power variation at each node to assess the inertia levels of weak nodes, making it highly valuable for power system planning. However, for extreme fault scenarios, such as when a particular node in the system faces a high risk of failure, it is more appropriate to evaluate the most severe fault scenario at that node using the method in [
26]. The inertia distribution characteristics can be more accurately determined by calculating the time-domain results. Moreover, the derivation of the NFDC is primarily based on the power system network equations and the inertia coefficients of generators. Compared to the method in [
26], its physical meaning is less clear, and the value of the NFDC can only be applied in the fields of power system planning and stability assessment.
6. Conclusions
With the continuous integration of RESs, critical challenges like varying inertia distribution characteristics and the decline of the inertia support capability of power systems have become increasingly prominent. This study focuses on analyzing the impact of generator sets on the inertia distribution characteristics in a power system. Moreover, based on the grid structure of the power system, the NFDC is proposed to evaluate the frequency dynamic characteristics of each node. This proposed evaluation method can quantify the configuration requirements of a GFM-ESS. Aiming at the inertia distribution characteristics of power system, an optimization configuration method for both a GFL-ESS and GFM-ESS is proposed. The conclusions drawn in this study are as follows:
The evaluation method based on the NFDC can describe the inertia distribution characteristics of a power system, which are determined by the distribution of generators and ESSs. The value of the NFDC is subject to the influence of multiple factors, including the inertia time constant of generators, the power output of RESs, and the grid structure of the power system. The elevated value of the NFDC at a certain bus signifies the degraded inertia response in the power system.
The NFDC can be utilized to formulate the operational boundaries of the power system and clarify the requirement of inertia resources in the power system. By means of rational configuration of GFM-ESSs and GFL-ESSs, the inertia resource in a GFM-ESS can be fully harnessed, thereby enabling the ESS to exert its regulatory ability in stabilizing power fluctuations. However, compared to traditional methods, the physical meaning of the NFDC is less clear, and its applicability in extreme scenarios is relatively weaker.
A GFM-ESS can effectively enhance the accommodation level of RESs and provide inertia support capability. The operational cost of the system and the configuration cost of ESSs can be reduced by employing the optimization configuration method proposed in this study. This method can also clarify the configuration requirements for both GFL-ESSs and GFM-ESSs. Furthermore, the upper and lower limits of the NFDC can be more clearly defined based on the operational standards of renewable energy power systems. Additionally, by incorporating certain extreme operating scenarios and using time-domain analysis methods, the weak nodes of the power system can be fully identified, enabling more reliable planning and configuration of ESSs.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}