1. Introduction
The reliability of mechanical structures is of great significance in enhancing the stability of products. Based on traditional time-invariant reliability models, the degradation phenomena of internal materials are usually not considered, and the calculated structural reliability is a constant value. The complexity and intelligence of the mechanical system give the system performance obvious time-variant dynamic characteristics. Complex engineering requirements cannot be met through traditional static reliability analysis methods. However, temporal variables, spatial variables, and the correlation of structural performance between time points are considered in time-variant reliability (TVR) analysis methods. Trends in the reliability of the system over the life cycle can be reflected to some extent [
1,
2].
The main approaches to solving TVR structural problems are the approximate analytical method [
3,
4], the numerical simulation method [
5,
6], and the surrogate model method [
7,
8]. Jiang et al. [
9,
10] discretized stochastic processes, and the TVR problem was transformed into a traditional time-invariant reliability problem. However, the accuracy and efficiency are seriously affected by the size of discrete time intervals. To address this limitation, Zhang et al. [
11] applied the Kriging surrogate model to approximate the trajectory of the maximum possible point (MPP), referred to as AMPPT. Zhang et al. [
12] improved training efficiency by applying the active Kriging surrogate model to the traditional stochastic process discretization method. Meng et al. [
4] proposed a semi-analytic extreme value method to approximate the limit state function (LSF) at the MPP. However, searching for the MPP requires calling a large number of time-variant LSF, which is less efficient.
Meanwhile, the method cannot address multiple MPPs or highly nonlinear and complex LSFs. Wu et al. [
13] proposed a system reliability method by combining the envelope method and the second-order reliability method (SORM). Gong and Frangopol [
14] proposed a new method for analyzing TVR based on the first-order reliability method (FORM). In addition, Wang and Chen [
15] proposed a stochastic process transformation method considering both random variables and stochastic process parameters for solving whole life cycle reliability variation.
The main numerical simulation methods are Monte Carlo Simulation (MCS) [
16], Subset Simulation (SS) [
17], and Importance Sampling (IS) [
6], etc. The advantages of the numerical simulation method are high accuracy and simple operation. Moreover, the dimensionality problem and complexity of LSF need not be taken into account. However, the guarantee of computational accuracy requires a large number of samples, which leads to inefficient computation [
18].
The surrogate model method approximates the actual model by constructing a function and applies the constructed function to solve TVR, which greatly improves computational efficiency. Hu et al. [
19] proposed an effective TVR analysis method based on a fast integration approach and surrogate model method. Classical approaches include the double-loop approach [
20,
21] and the single-loop approach. Wang et al. [
22] proposed a coupled extreme value response surface method based on double-loop substitution. Hu and Du [
21] improved the coupled extreme value response surface method to construct a more efficient adaptive Kriging–MCS hybrid model. The method based on a double-loop surrogate model needs to find extreme value in the inner loop and use the result to perform reliability analyses in the outer loop, which is inefficient. In order to improve efficiency, the single-loop method is proposed to transform the TVR problem into a classification problem through the adaptive surrogate model, e.g., single-loop Kriging (SILK) [
23,
24]. With the surrogate model method, high nonlinearities, high dimensionality, and implicit performance functions can be handled well. However, only reliability over a particular time interval can be obtained. Solving the trend of reliability over the whole life cycle of a product requires discretizing the life cycle and calculating the reliability in different time intervals, which is inefficient [
18].
Among the TVR methods based on the crossing rate, Rice [
25] pioneered the first crossing rate theory to study the problem of dynamic response exceeding a certain fixed threshold at a given time, laying the foundation for the development of the first crossing rate method. Andrieu-Renaud et al. [
3] proposed the PHI2 method to convert the time-variant problem into a static parallel system reliability problem, improving the efficiency greatly. To address the lack of stability of the PHI2 method, Sudret et al. [
26] proposed the PHI2+ method with a more concise process for the calculation of the crossing rate. Hu et al. [
27] proposed the Rice/FORM to solve the TVR of the structure by converting the time-variant performance function to the Gaussian process to calculate the crossing rate. Jiang et al. [
28] converted the calculation of the crossing rate in the time-variant system into a solution of reliability in the time-invariant system, improving the efficiency of the solution. Although the crossing rate approach is effective in solving TVR problems, there are some inherent drawbacks, such as the assumption of Poisson distribution of crossing events and the limitations imposed by the application of FORM.
In this paper, a first crossing approach for analyzing TVR based on the error distance function (EDF) and Kriging surrogate model is presented, referred to as EDFK-FCTP. The EDFK-FCTP method establishes the functional relationship between the first crossing time point (FCTP) and input random variables by constructing the adaptive Kriging model. Moreover, kernel density estimation (KDE) is used to estimate the probability density function (PDF) of the FCTP, eliminating the probabilistic assumptions of traditional crossing rate methods. Hence, in this paper, (1) a Kriging-based adaptive surrogate model of FCTP is developed; (2) the EDF is constructed by combining model error and sample distance; (3) the geometric mean of probability density of training samples and the maximum error of the first four order origin moments of two adjacent iterations are used as the convergence condition to establish the optimal surrogate model for FCTP; (4) on the basis of the optimal surrogate model, KDE is used to solve PDF of the FCTP to obtain trend of failure probability during the product life cycle.
3. Kriging-Based Probability Density Estimation for FCTP
For LSF with high dimensionality and high nonlinearity, MCS-based methods for solving FCTP using
is inefficient. In this paper, the FCTP surrogate model based on the origin moment estimation method combining Latinized partially stratified sampling (LPSS) [
31] and the adaptive Kriging model [
32] is constructed. KDE solves the PDF of FCTP.
3.1. Kriging Model
The Kriging surrogate model is an unbiased estimation model [
33] that combines global approximation with local random errors to fit highly nonlinear models well. The Kriging surrogate model represents the response value as a combination of a parameterized polynomial model and a non-parameterized stochastic process [
32], which is generally expressed as follows:
where
is true model,
is the pending Kriging model,
is the matrix of basis functions,
is the number of basis functions,
is matrix of unknown weight coefficients, which can be estimated from the training samples,
denotes parameterized polynomial model, which gives trend of the model, and
denotes a non-parametrizable stochastic process, which provides information about deviation of the model, the probabilistic properties are as follows:
where
is the random process variance, and
is the correlation parameter to be sought.
Assuming that there are
training samples
, the correlation matrix between the samples is denoted as follows:
For prediction point
, the correlation vector is
After selecting the correlation function, according to the Kriging theory [
34], the optimal unbiased prediction response of model can be expressed as follows:
where
is estimate of
,
is output value of the training samples, and
is a matrix consisting of the values of
basis functions at
training samples. The variance estimate is expressed as follows:
If Gaussian function is chosen as the correlation function, the parameter vector
can be solved by great likelihood estimation:
If any unknown random input variable and output response both obey Gaussian distribution, the mean
and variance
are given by
The values of
and
were solved by the MATLAB (R2023a) toolbox UQLab [
35]. At the training samples
, there are
and
. Generally,
at other samples. The degree of deviation of predicted value from actual value at
can be reflected through
. Thus,
is able to reflect the predictive accuracy of the surrogate model at
.
3.2. Initial Surrogate Model of FCTP
For initial training samples, various sampling methods are available, such as random sampling (RS), Latin hypercube sampling (LHS), and uniform sampling (US). At high dimensions, sample collection in significant space cannot be guaranteed using RS. LHS and US ensure that sampling points are as dispersed as possible. However, the stochastic properties of LHS method may lead to the instability of the surrogate model when the training samples are few. Therefore, in this paper, the US method is used to generate initial training samples. In addition, the transformation of all random variables involved in the reliability problem from the space to which they belong to standard normal space through Nataf transform [
36] facilitates the computation. A larger sampling range is not only slow to converge, but fitting accuracy is also reduced, especially for nonlinear problems. Based on the
principle, the initial sample range in standard normal space is determined as
, and the range is continuously reduced during the iteration process. According to Shi [
37], the number of initial sampling points is generally 10~15 to ensure the accuracy of the model and the efficiency of active learning. Also, considering the effect of dimensionality determines the number of initial samples to be
where
is the number of dimensions. The initial samples can be represented as follows:
It can also be expressed as:
where
,
.
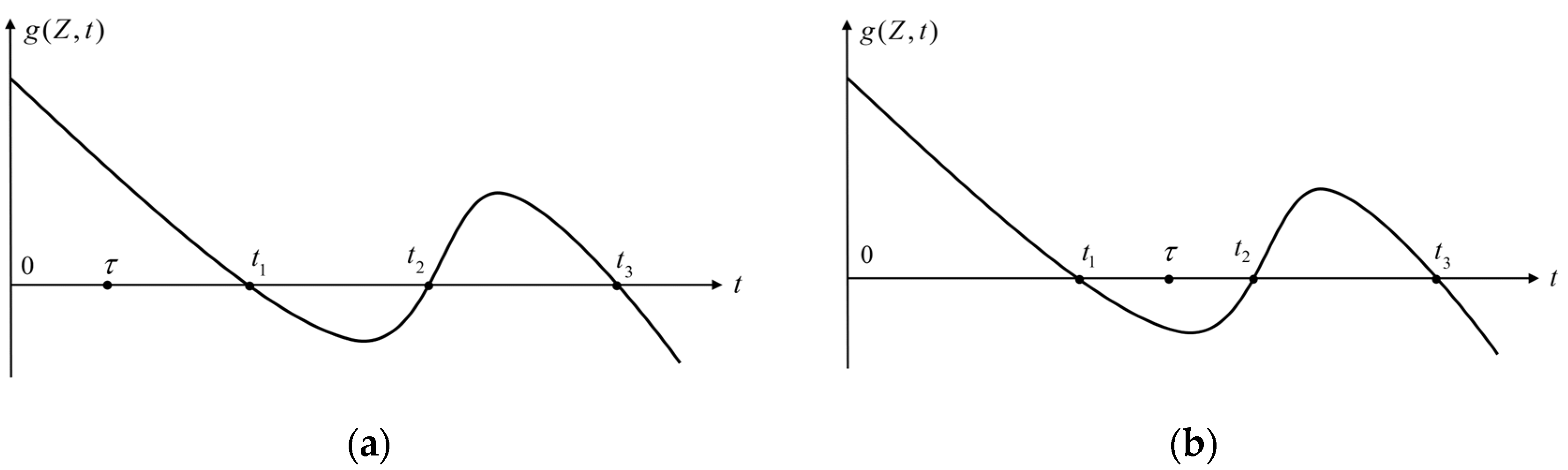
After generating the initial training sample
, the performance function
can be viewed as univariate function
of time. Thus, the FCTP
of initial training sample can be solved by the following equation:
The initial set of training samples , is obtained. Further, the initial Kriging surrogate model of FCTP is constructed using Equation (8). The subsequent jth iteration is denoted .
3.3. Active Learning Function EDF
After transforming input random variables into mutually independent standard normal variables [
38], the first-order origin moments of the
jth FCTP surrogate model can be expressed as follows:
where
is the joint probability density function of mutually independent standard normal distributions. Since most of the integrated functions composed of LSF and PDF are not integrable [
39], numerical methods can be used to approximate the integration process of Equation (22):
where
is the integration point of numerical integration,
is the weight coefficient corresponding to the integration point, and
is the number of integration points. In this paper, the LPSS method is used to generate the integration points and weight coefficients.
The key to efficient surrogate modeling lies in the sample selection strategy [
40]. This paper summarizes two main factors influencing sample selection:
(1) Model Error. The mean can measure the model error, variance, and joint PDF [
41]. Since the first-order origin moments characterize the mean value, the samples selected should be generated as close as possible to the mean of FCTP. The approximate first-order origin moments of the
jth FCTP surrogate model
can be obtained using Equation (23). Variance measures the degree of dispersion of the data and is an important basis for constructing active learning methods. The variance estimate of the Kriging surrogate model can be obtained by Equation (17), characterizing the prediction error of the model at the prediction point. The joint PDF
of random variables can ensure that the selected points fall in a large probability region, effectively improving the estimation accuracy of the model.
(2) Sample Distance. The distance between samples is an important principle in sample selection. On the one hand, the selected samples should be as sparse as possible to ensure global accuracy of the model; on the other hand, the selected samples should be prevented from bunching to avoid reducing the utilization rate of samples. In the
dimensional space
, the Euclidean distance
from any point
to point
is
It is assumed that current surrogate model training set
has
sample points
,
, The distance from any point
to each point in set
is
The average value
of distances from point
to each point in set
can be used as a measure of the sparsity of the samples:
Using the minimum distance
from any point
to each point in set
can avoid bunching as follows:
It is essential to choose a suitable active learning function for building highly accurate and efficient surrogate models. Too many adaptive selected samples can consume a lot of computational resources and reduce the benefits of the surrogate model method. Model accuracy cannot be guaranteed with too few samples. Based on the above two major factors, the active learning function EDF is proposed with the following expression:
where
is the weight coefficient,
in this paper. The difference
characterizes the importance of model error with sample distance and contribution to the learning function. On the composition of the EDF, the relationship between
and
is very important. The ratio of
and
is a dimensionless number, which reflects the degree of approximation of the selected point to the ideal model. The EDF involves
with
,
,
and
, where
means that the selected sample points should be generated as close as possible to the mean value of the FCTP. At the same time, the influence of probability density function and variance is considered.
Further, in the pool of possible samples
, the point that minimizes the learning function
will be selected as the new central sample as follows:
Based on the
principle,
initial training samples are generated in the range
to improve the convergence rate of the model.
samples are added uniformly to the training sample set on the hypersphere centered at
with radius
in subsequent iterations. Moreover, the sample interval
decreases gradually:
Convergence conditions need to be set to ensure model accuracy. The geometric mean of the probability density of training samples and the maximum error of the first four order origin moments of two adjacent iterations are taken as the convergence conditions. The specific mathematical expression is
where
,
,
is convergence accuracy, usually taken as 0.001. In the convergence condition, the former indicates that if the training model infinitely approaches the actual model, the geometric mean of the probability density function of the last two adjacent iterative training models infinitely approaches 1. The latter shows that if the training model is infinitely close to the actual model, the maximum change rate of the first four order origin moment in the last two adjacent iterations will infinitely approach 0.
3.4. KDE-Based Life Cycle TVR Analysis
Commonly used nonparametric estimation methods include kernel density estimation (KDE), K-nearest neighbor (KNN), kernel least squares estimation (KLS), etc. KDE is a method of estimating random variable PDF by smoothing data in data space using the kernel function. KDE is only based on data samples for inference, and the actual situation of the data can be reflected well with fewer overall distributional assumptions. Therefore, in this paper, the KDE method is adopted to estimate the PDF of FCTP.
Let
be samples from one dimensional continuous sample population
. The kernel density of PDF
at any point
is defined as follows:
where
is the kernel function; the Gaussian kernel function is used, i.e.,
; and
is bandwidth. The bandwidth parameter can have a big impact on the estimation results, but there is no universal way to choose the right bandwidth parameter. In this paper, the optimal bandwidth is determined by mean integrated squared error (MISE). Combined with the Gaussian kernel function, the optimal bandwidth can be determined as follows:
where
is standard deviation of sample population
.
Based on probabilistic properties
of the input random variable
,
samples are generated by simulation. The FCTP surrogate model
is built using Kriging models and EDF learning function. The FCTPs
are computed for all samples. The PDF of FCTP is obtained by combining the KDE method as follows:
where
. Therefore, the failure probability of product over its life cycle is expressed as follows:
where
is the cumulative distribution function of standard normal distribution.
4. Algorithm Flow
The flowchart of TVR analysis method based on EDF-FCTP-Kriging is shown in
Figure 3. Detailed steps are as follows:
Step 1: All the random variables involved in the problem are transformed from space to standard normal space.
Step 2: Initialize the number of iterations and define the convergence accuracies .
Step 3: For , generate initial training samples on the interval based on US, and the corresponding FCTP is calculated by the LSF equal to zero.
Step 4: Build initial surrogate model using Kriging model based on initial training sample set .
Step 5: Obtain integration points and the corresponding weight coefficients by LPSS method and calculate the first four order origin moments of initial surrogate model. Estimate the probability distribution of the FCTP using KDE based on the following.
Step 6: Calculate the average and minimum distance from training samples to all candidate samples.
Step 7: , search for the best sample center among candidate samples using the EDF learning function.
Step 8: Add training samples on hypersphere centered at with radius and calculate corresponding FCTP .
Step 9: Update training samples, , , and build surrogate model through Kriging.
Step 10: Judge according to the convergence condition; if or , then return Step 7, otherwise output the optimal surrogate model and the PDF of FCTP.
Step 11: Calculate cumulative failure probability over the life cycle by the optimal surrogate model and the probability density function of the FCTP.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}