
Development of Automatic Berthing Support Program for Autonomous Ships

 ,
,
Abstract
1. Introduction
2. Methods
2.1. Forces Acting on the Hull During Berthing
2.1.1. Wind Pressure and Wind Moment
2.1.2. Current Pressure and Current Moment
2.1.3. Frictional Force
2.2. Thruster Output Calculation
2.2.1. Theoretical Calculation
2.2.2. Thruster Output Calculation
3. Results
3.1. Automatic Berthing Support Program
3.1.1. Thruster Output and Output Angle Calculation Procedure
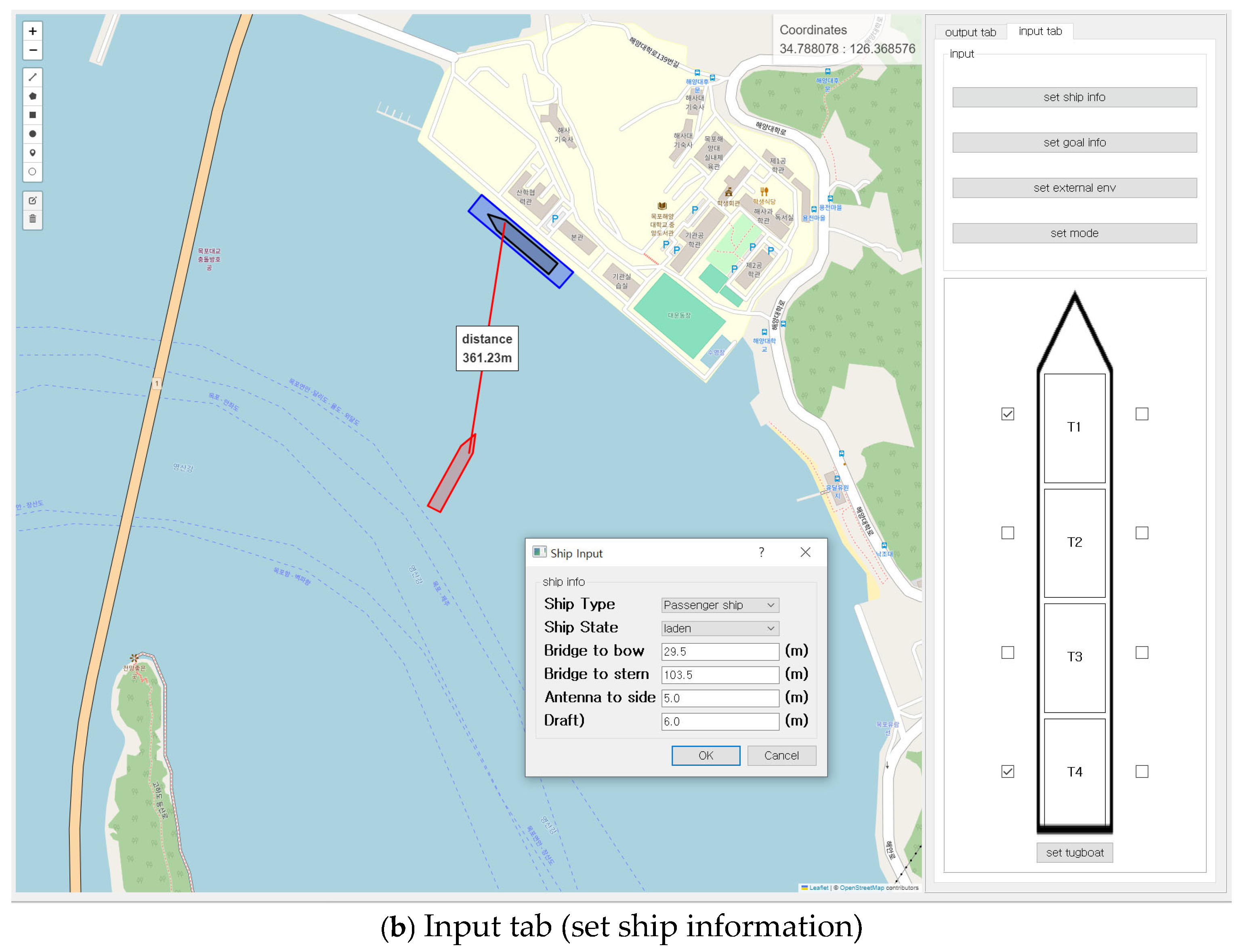
3.1.2. Determining Input Elements
3.1.3. Development of the Automatic Berthing Support Program
3.2. Verification of the Automatic Berthing Support Program
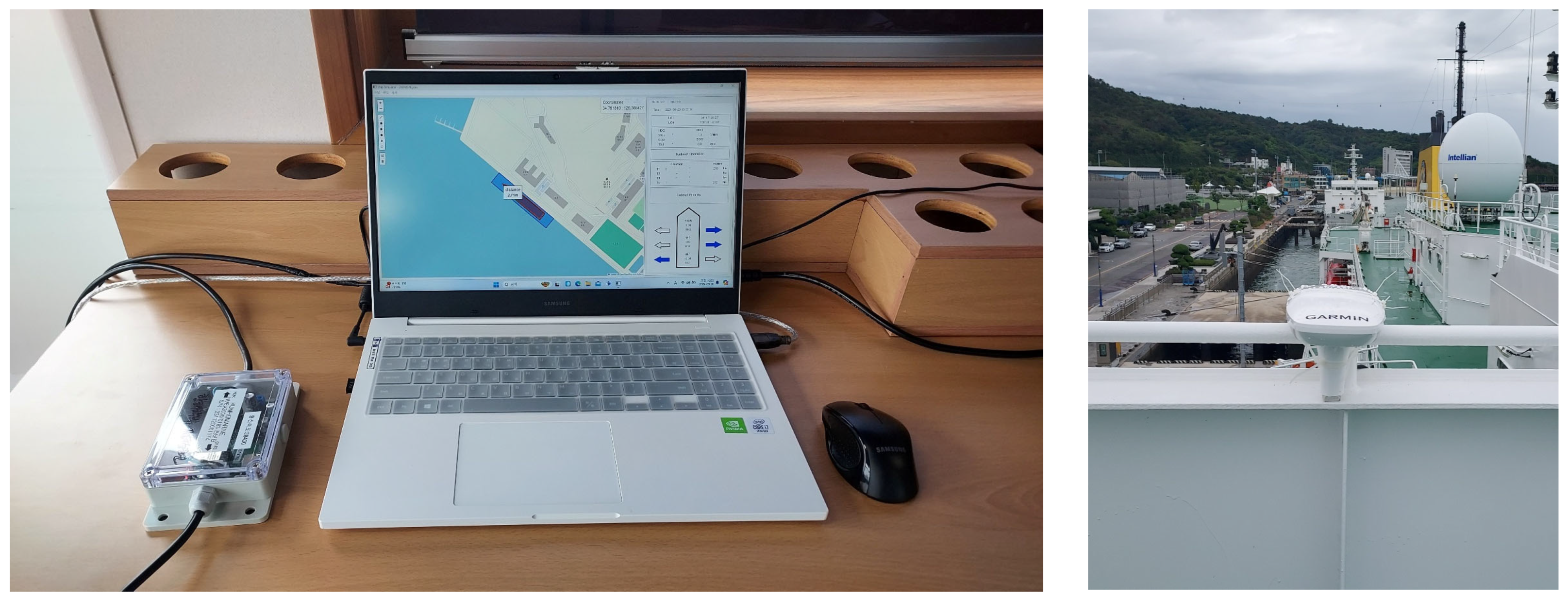
3.2.1. Experimental Condition
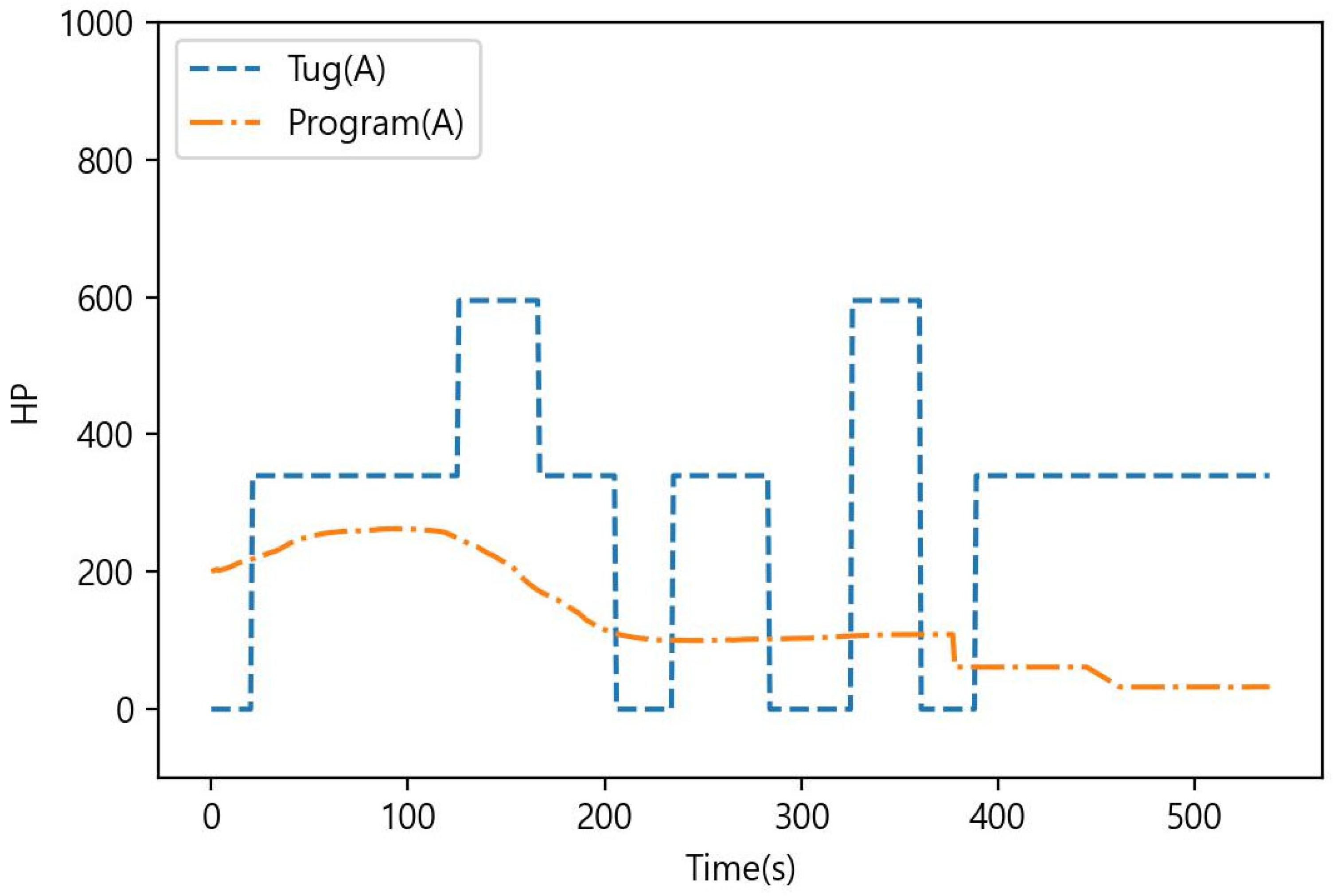
3.2.2. Experimental Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, S.; Wu, Q.; Liu, J.; He, Y.; Li, S. State-of-the-art review and future perspectives on maneuvering modeling for automatic ship berthing. J. Mar. Sci. Eng. 2023, 11, 1824. [Google Scholar] [CrossRef]
- Du, Y.Z.; Zhu, Z.J.; Xie, H.W.; Meng, F.B.; Liu, J. Nonlinear Model predictive control for automatic berthing of the underactuated twin-propeller twin-rudder ship. In Proceedings of the 2021 China Automation Congress (CAC), Beijing, China, 22–24 October 2021; pp. 3543–3548. [Google Scholar]
- Kim, K.; Kim, B.; Kim, Y. A study on the optimal tracking control system design for automatic ship berthing. J. Korean Soc. Power Syst. Eng. 2018, 22, 72–80. [Google Scholar] [CrossRef]
- Kamil, A.; Allal, A.A.; Melhaoui, Y.; Mansouri, K.; Rachik, M. A comparative analysis of methods related to automatic ship berthing. In Proceedings of the 2019 5th International Conference on Optimization and Applications (ICOA), Kenitra, Morocco, 25–26 April 2019; pp. 1–4. [Google Scholar]
- Bui, V.P.; Kawai, H.; Kim, Y.B.; Lee, K.S. A ship berthing system design with four tug boats. J. Mech. Sci. Technol. 2011, 25, 1257–1264. [Google Scholar] [CrossRef]
- Lee, D.H.; Huynh, T.; Kim, Y.B.; Park, J.S. Motion control system design for barge-type surface ships using tugboats. J. Mar. Sci. Eng. 2022, 10, 1413. [Google Scholar] [CrossRef]
- Xue, Y.Z.; Clelland, D.; Lee, B.S.; Han, D.F. Automatic simulation of ship navigation. Ocean Eng. 2011, 38, 2290–2305. [Google Scholar] [CrossRef]
- Higo, Y.; Sakano, M.; Nobe, H.; Hashimoto, H. Development of trajectory-tracking maneuvering system for automatic berthing/unberthing based on double deep Q-network and experimental validation with an actual large ferry. Ocean Eng. 2023, 287, 115750. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhang, X.K. A review of research on automatic berthing control for ships. J. Dalian Marit. Univ. 2015, 3, 1–9. [Google Scholar]
- KISTEP. Technology Trend Brief; Korea Institute of S&T Evaluation and Planning: Eumseong-gun, Republic of Korea, 2020; pp. 3–11. [Google Scholar]
- Hasegawa, K.; Kitera, K. Mathematical model of maneuverability at low advance speed and its application to berthing control. In Proceedings of the 2nd Japan-Korea Joint Workshop of Ship and Marine Hydrodynamics, Osaka, Japan, 28–30 June 1993; pp. 144–153. [Google Scholar]
- Tran, V.L.; Im, N. A study on ship automatic berthing with assistance of auxiliary devices. Int. J. Nav. Archit. Ocean. Eng. 2012, 4, 199–210. [Google Scholar] [CrossRef]
- Bae, C.H.; Lee, S.K.; Lee, S.E.; Kim, J.H. A study of the automatic berthing system of a ship using artificial neural network. J. Navi. Port Res. 2008, 32, 589–596. [Google Scholar] [CrossRef]
- Lee, D. Reinforcement learning-based automatic berthing system. arXiv 2021, arXiv:2112.01879. [Google Scholar]
- Vo, A.K.; Mai, T.L.; Yoon, H.K. Path planning for automatic berthing using ship-maneuvering simulation-based deep reinforcement learning. Appl. Sci. 2023, 13, 12731. [Google Scholar] [CrossRef]
- Shimizu, S.; Nishihara, K.; Miyauchi, Y.; Wakita, K.; Suyama, R.; Maki, A.; Shirakawa, S. Automatic berthing using supervised learning and reinforcement learning. Ocean Eng. 2022, 265, 112553. [Google Scholar] [CrossRef]
- Executive, T.M. Video: Japanese Demonstration of Autonomous Docking System. Available online: https://maritime-executive.com/article/video-japanese-demonstration-of-autonomous-docking-system (accessed on 29 November 2024).
- SAFETY4SEA. Watch: World’s First Successful Trail of Auto Berthing and Un-Berthing System. Available online: https://www.marineinsight.com/shipping-news/watch-world-first-successful-demonstration-test-of-auto-berthing-and-un-berthing-system/ (accessed on 29 November 2024).
- Executive, T.M. First Autonomous Navigation and Berthing Test on a Containership. Available online: https://maritime-executive.com/article/first-autonomous-navigation-and-berthing-test-on-a-containership (accessed on 29 November 2024).
- Rolls-Royce. Rolls-Royce and Finferries Demonstrate World’s First Fully Autonomous Ferry. Available online: https://www.rolls-royce.com/media/press-releases/2018/03-12-2018-rr-and-finferries-demonstrate-worlds-first-fully-autonomous-ferry.aspx (accessed on 29 November 2024).
- Corporation, W. World’s First Autodocking Installation Successfully Tested by Wärtsilä. Available online: https://www.wartsila.com/media/news/26-04-2018-world-s-first-autodocking-installation-successfully-tested-by-wartsila-2169290 (accessed on 29 November 2024).
- Riviera, Yara Birkeland: Automated Mooring System Selected. Available online: https://www.rivieramm.com/news-content-hub/news-content-hub/yara-birkeland-automated-mooring-system-selected-55176 (accessed on 29 November 2024).
- Penta, V. Launching the First Fully Integrated Assisted Docking System. Available online: https://www.volvopenta.com/about-us/news-page/2021/jan/launching-the-first-fully-integrated-assisted-docking-system/ (accessed on 29 November 2024).
- Inoue, K. Theory and Practice of Ship Handling; Sanghakdang: Seoul, Republic of Korea, 2013; pp. 149–197. [Google Scholar]
- OCIMF (Oil Companies International Marine Forum). Mooring Equipment Guidelines, 3rd ed.; Witherby Seamanship International: Baltimore, MD, USA, 2008; pp. 179–196. [Google Scholar]
- SNAK (The Society of Naval Architects of Korea). Ship Resistance and Propulsion; Jisungsa: Seoul, Republic of Korea, 2012; p. 72. [Google Scholar]
- OpenStreetMap. Available online: https://www.openstreetmap.org (accessed on 28 November 2024).
- Ministry of Oceans and Fisheries. Harbor and Fishery Design Criteria; Ministry of Oceans and Fisheries: Sejong-si, Republic of Korea, 2020; pp. 17–20.
- Chen, C.; Li, Y.; Wang, T. Real-time tracking and berthing aid system with occlusion handling based on LiDAR. Ocean Eng. 2023, 288, 115929. [Google Scholar] [CrossRef]
- Qi, W.T.; Ying, L.; Chen, C. Spatial state analysis of ship during berthing and unberthing process based on 3D LiDAR. Ocean Eng. 2023, 288, 116067. [Google Scholar]
- Lu, X.D.; Li, Y.; Xie, M. Preliminary study for motion pose of inshore ships based on point cloud: Estimation of ship berthing angle. Measurement 2023, 214, 112836. [Google Scholar] [CrossRef]
- Kim, H.; Kim, D.; Park, B.; Lee, S. Artificial intelligence vision-based monitoring system for ship berthing. IEEE Access 2020, 8, 227014–227023. [Google Scholar] [CrossRef]
- Fu, H.; Huang, Y.; Li, W. Ship berthing motion control based on improved Simulation Localization and Mapping algorithm. In Proceedings of the 2021 4th International Symposium on Traffic Transportation and Civil Architecture (ISTTCA), Suzhou, China, 12–14 November 2021; pp. 233–236. [Google Scholar]
- Kim, S.; Jo, H.; Kim, J.; Park, J. Development of an autonomous docking system for autonomous surface vehicles based on symbol recognition. Ocean Eng. 2023, 283, 114753. [Google Scholar] [CrossRef]
- Hu, B. LIDAR-Based Unmanned Vessel Berthing and Unberthing Information Sensing Research. Master’s Thesis, Dalian Maritime University, Dalian, China, 2022. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Data | Unit |
|---|---|
| LOA | m |
| LBP | m |
| Breadth (B) | m |
| Draft | m |
| Block coefficient (Cb) | - |
| Transverse projected area (AT) | m2 |
| Lateral projected area (AL) | m2 |
| Water depth | m |
| Wind speed | Knot |
| Relative wind angle | Degree |
| Current speed | Knot |
| Relative current angle | Degree |
| Berthing speed | Knot |
| Input Data | Unit |
|---|---|
| Resultant wind pressure coefficient | - |
| Lateral current force coefficient | - |
| Hydraulic moment coefficient | - |
| Wetted surface area | m2 |
| Input Data | Value | Unit |
|---|---|---|
| Air density | 0.125 | kg·s2/m4 |
| Water density | 104.6 | kg·s2/m4 |
| Frictional resistance coefficient | 0.002 | - |
| Ship’s Type | Laden | Ballast | ||||||
|---|---|---|---|---|---|---|---|---|
| B | Cb | AT | AL | B | Cb | AT | AL | |
| Container | LBP/7.22 | 0.68 | B*38.0 | LBP × 40.0 | LBP/7.22 | 0.63 | B*38.0 | LBP × 20.0 |
| Bulk | LBP/6.01 | 0.85 | B*16.1 | LBP × 15.0 | LBP/6.01 | 0.80 | B*29.1 | LBP × 15.7 |
| Tanker | LBP/5.41 | 0.80 | B*17.7 | LBP × 10.0 | LBP/5.41 | 0.75 | B*30.0 | LBP × 20.0 |
| PCC | LBP/5.88 | 0.60 | B*29.2 | LBP × 29.9 | LBP/5.88 | 0.52 | B*34.9 | LBP × 31.9 |
| LNG | LBP/6.12 | 0.75 | B*36.0 | LBP × 30.0 | LBP/6.12 | 0.70 | B*36.9 | LBP × 31.7 |
| Passenger | LBP/5.93 | 0.55 | B*13.8 | LBP × 12.7 | LBP/5.93 | 0.52 | B*15.0 | LBP × 15.0 |
| Others | LBP/6.00 | 0.70 | B*20.0 | LBP × 20.0 | LBP/6.00 | 0.70 | B*20.0 | LBP × 20.0 |
| Parameter | Information |
|---|---|
| Dimensions (length × width × height) | 334 × 156 × 66 mm3 |
| Weight | 810 g |
| Operation temperature range | −15° to 70° |
| Compass safe distance | 0 mm |
| Position accuracy | <3 m (CEP95) |
| Heading accuracy | 2° RMS |
| Category | Information |
|---|---|
| Gross tonnage (t) | 9196 |
| Length × breadth × depth (m) | 133 × 19.4 × 11.05 |
| Transverse projected area (m2) | 300 |
| Lateral projected area (m2) | 1430 |
| Category | Information |
|---|---|
| Gross tonnage (t) | 145 |
| Length × breadth × depth (m) | 27.17 × 8.6 × 3.8 |
| Main engine | 2 sets × Caterpillar (1700 hp) |
| Propeller type | Aquamaster propeller |
| Time | Order |
|---|---|
| 12 September 13:11:23 | Dead slow/perpendicular push |
| 13:11:44 | Stop engine |
| 13:12:20 | Dead slow/perpendicular push |
| 13:14:05 | Slow/perpendicular push |
| 13:14:46 | Dead slow/perpendicular push |
| 13:15:25 | Stop engine |
| 13:15:54 | Dead slow/perpendicular push |
| 13:16:43 | Stop engine |
| 13:17:25 | Slow/perpendicular push |
| 13:18:00 | Stop engine |
| 13:21:00 | Dead slow/perpendicular push |
| 13:22:20 | Stop engine |
| 13:26:00 | Tug line let go |
| Category | Information |
|---|---|
| Model | 3-phase induction motor |
| Output | 1000 kW |
| Propeller diameter | 1850 mm (4 blades) |
| Type of propeller | Forward skewed type |
| Time (h/min) | Distance from Pier (m) | Difference (m) | Actual Berthing Speed (m/s) | Standard Berthing Speed (m/s) |
|---|---|---|---|---|
| 13:13 | 285 | |||
| 13:14 | 224 | 61 | 1.02 | 0.15 |
| 13:15 | 156 | 68 | 1.13 | |
| 13:16 | 113 | 43 | 0.72 | |
| 13:17 | 78 | 35 | 0.58 | |
| 13:18 | 50 | 28 | 0.47 | |
| 13:19 | 30 | 20 | 0.30 | 0.10 |
| 13:20 | 15 | 15 | 0.25 | 0.05 |
| Sensing Technology | Advantages | Disadvantages |
|---|---|---|
| LiDAR |
|
|
| Camera |
|
|
| Inertial Measurement Unit (IMU) |
|
|
| Automatic Berthing Support Program |
|
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, B.-S.; Jung, C.-H.; Kim, K.; Kim, H.; Kim, J.-S.; Kim, D.-H. Development of Automatic Berthing Support Program for Autonomous Ships. Appl. Sci. 2025, 15, 228. https://doi.org/10.3390/app15010228
Kang B-S, Jung C-H, Kim K, Kim H, Kim J-S, Kim D-H. Development of Automatic Berthing Support Program for Autonomous Ships. Applied Sciences. 2025; 15(1):228. https://doi.org/10.3390/app15010228
Chicago/Turabian StyleKang, Byung-Sun, Chang-Hyun Jung, Keewon Kim, Hyunwoo Kim, Jin-Soo Kim, and Dae-Hae Kim. 2025. "Development of Automatic Berthing Support Program for Autonomous Ships" Applied Sciences 15, no. 1: 228. https://doi.org/10.3390/app15010228
APA StyleKang, B.-S., Jung, C.-H., Kim, K., Kim, H., Kim, J.-S., & Kim, D.-H. (2025). Development of Automatic Berthing Support Program for Autonomous Ships. Applied Sciences, 15(1), 228. https://doi.org/10.3390/app15010228