

Fault-Coping Algorithm for Improving Leader–Follower Swarm-Control Algorithm of Unmanned Surface Vehicles

Abstract
1. Introduction
2. Mathematical Modeling of Unmanned Surface Vehicle (USV)
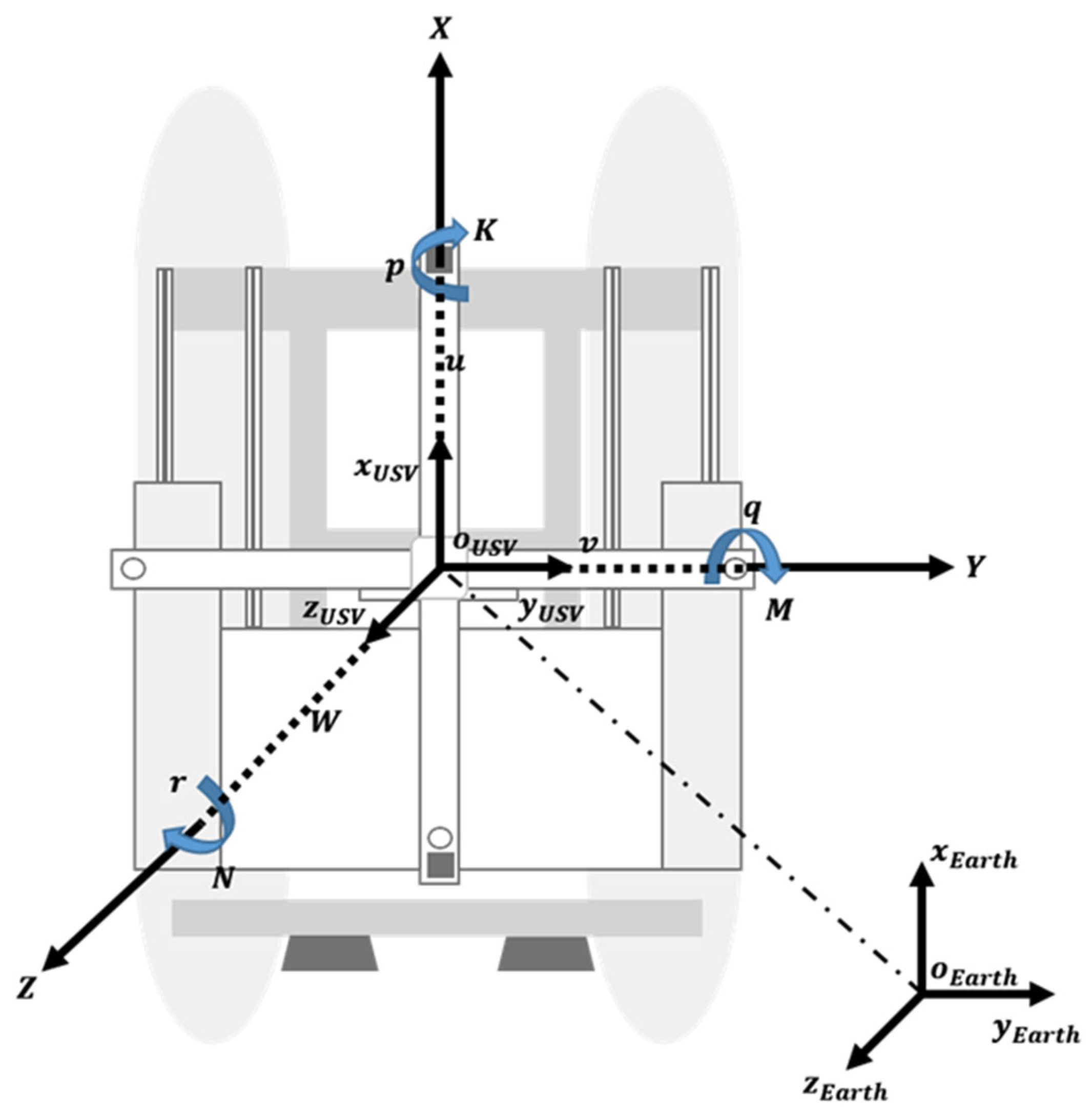
2.1. Kinematics of USV
2.2. Modeling of USV Dynamics
3. System Structure of USV
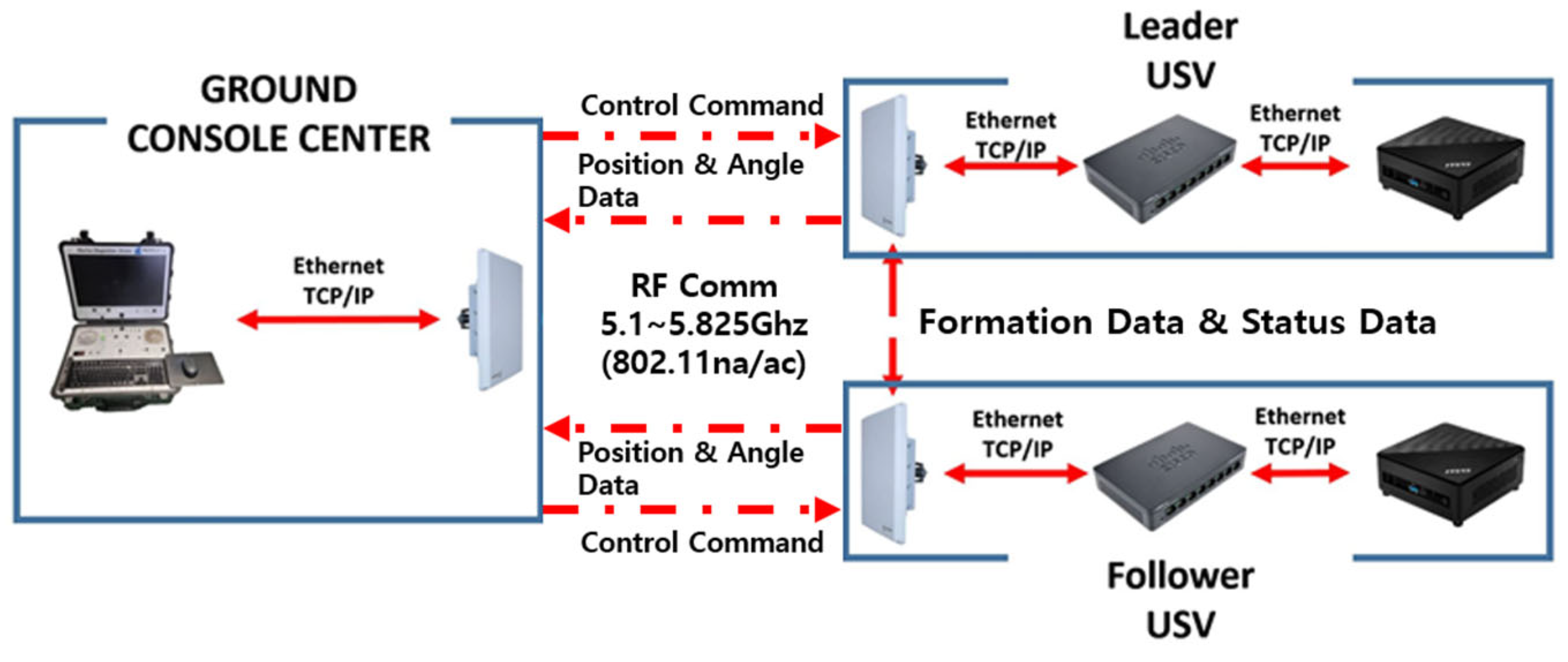
3.1. Communication System of USV
3.2. Sensor System of the USV
4. Control Algorithm
4.1. Leader–Follower Swarm-Control Algorithm
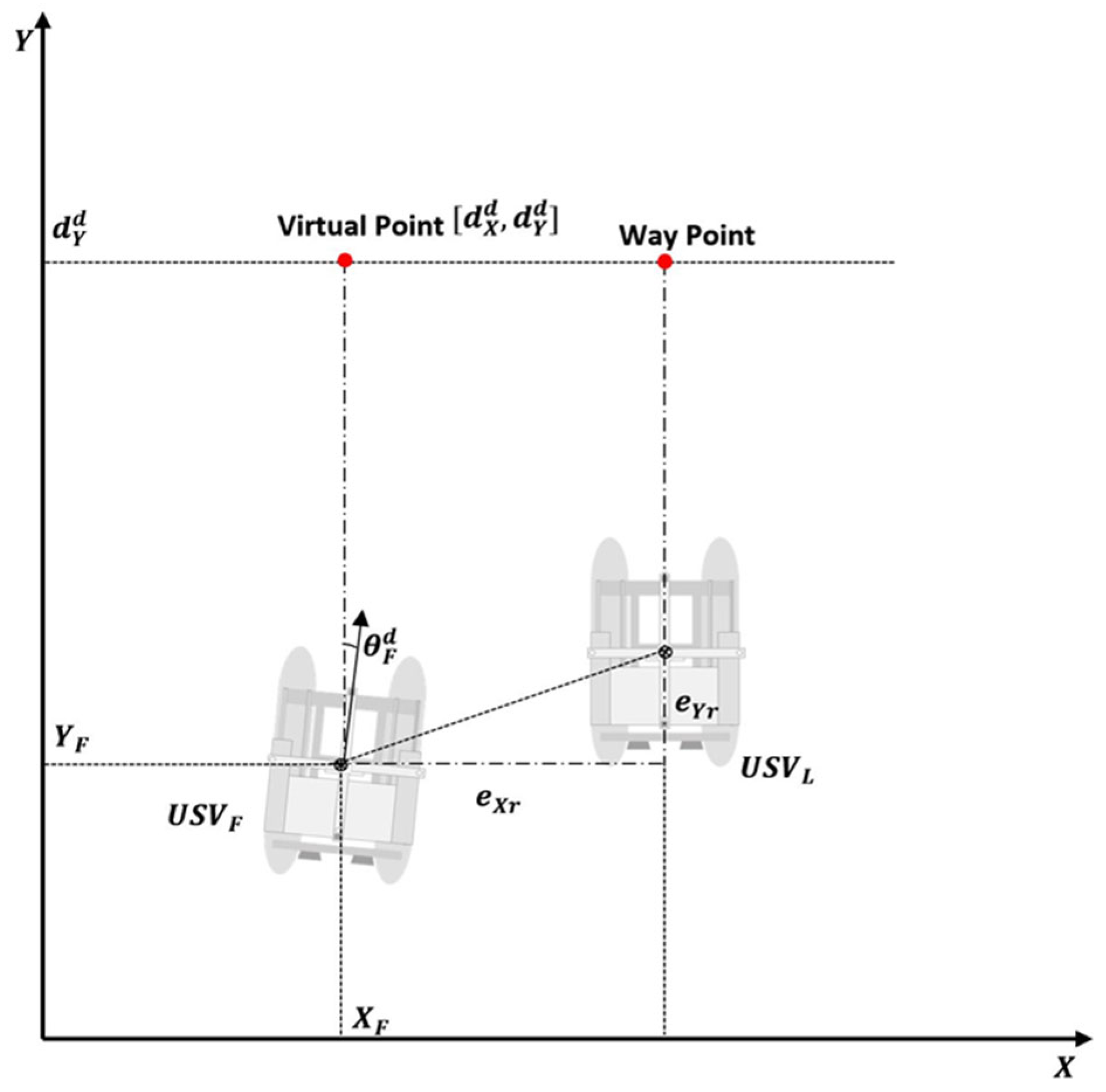
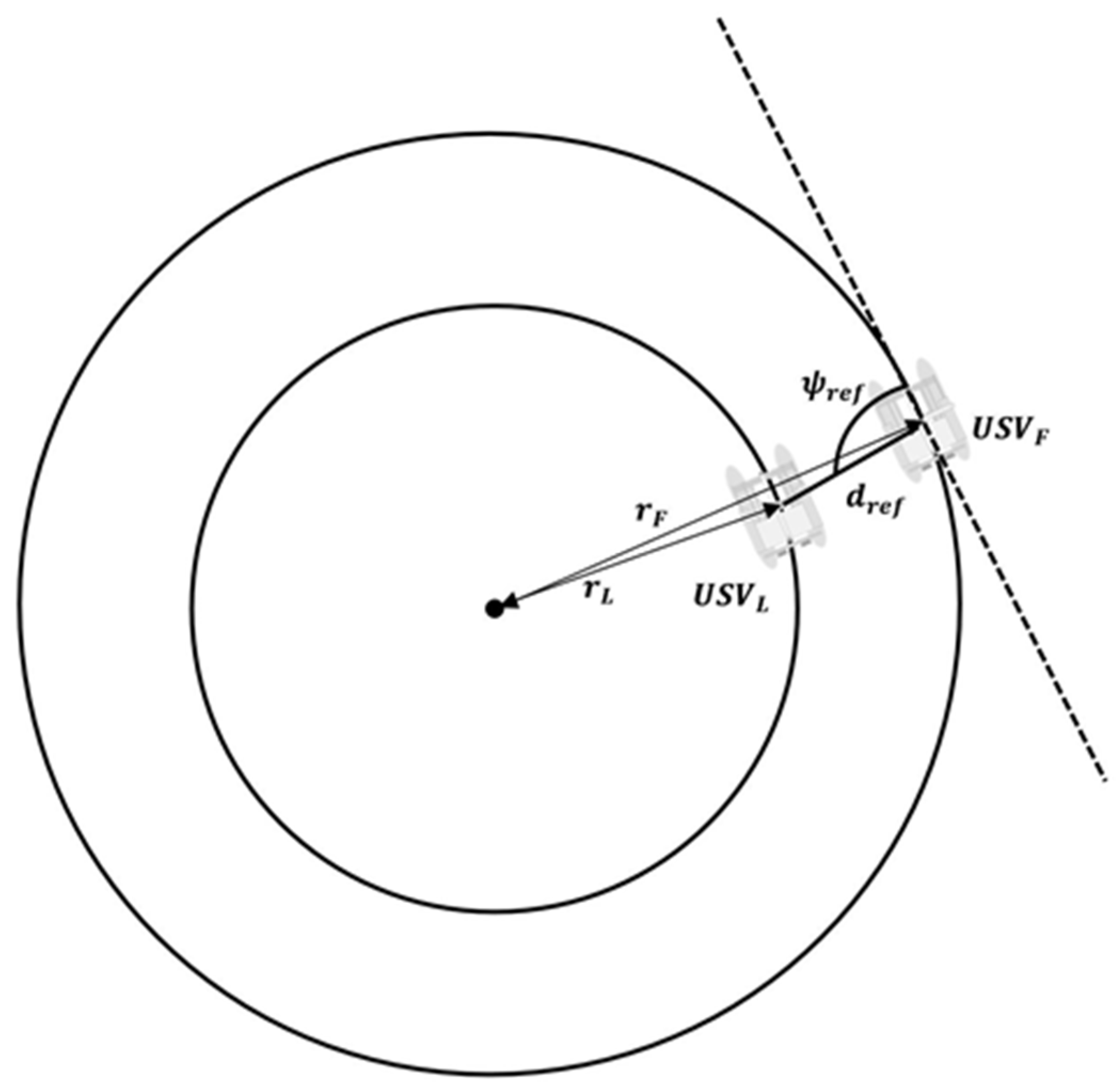
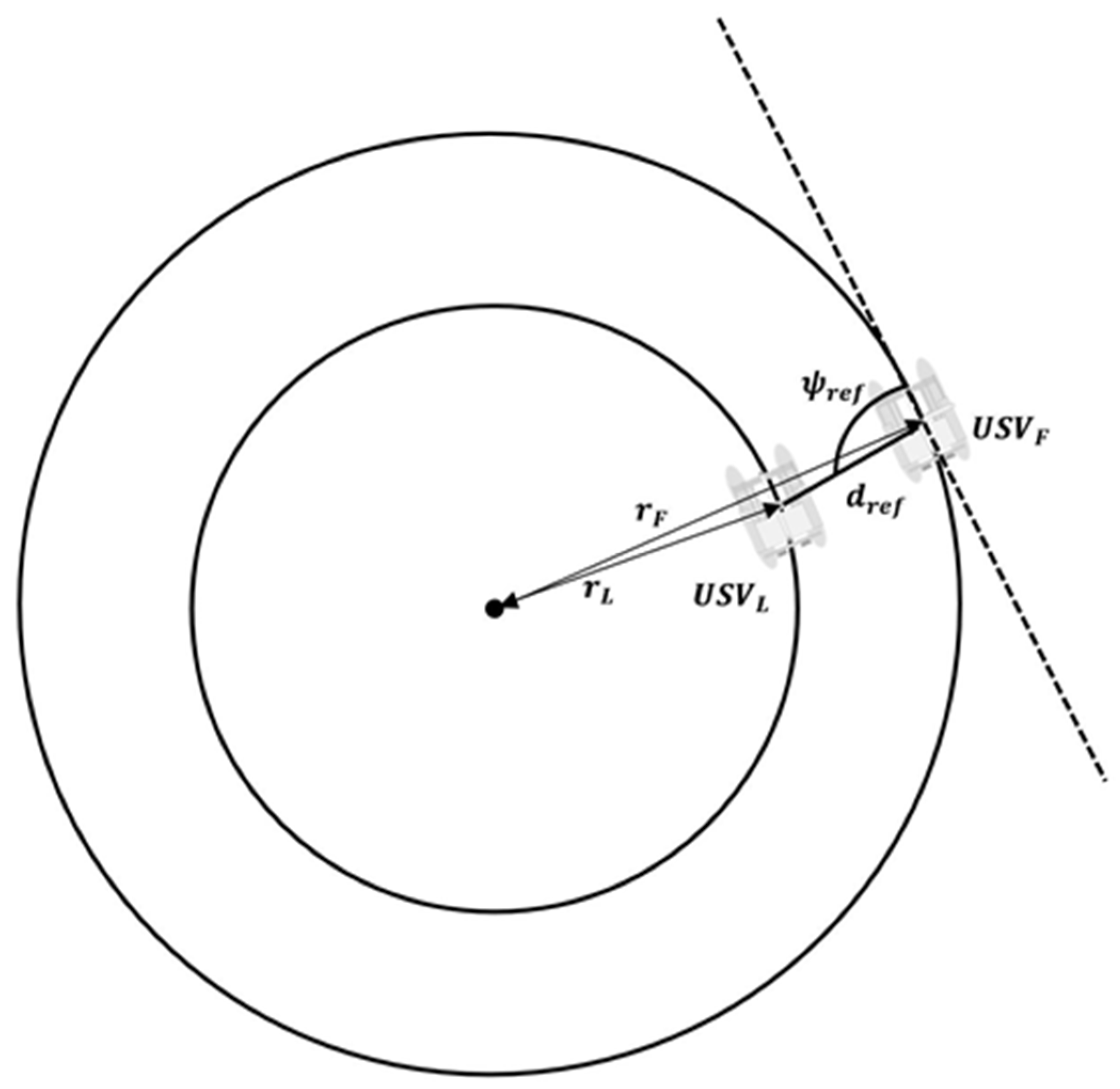
4.1.1. Virtual Point Based on Leader USV
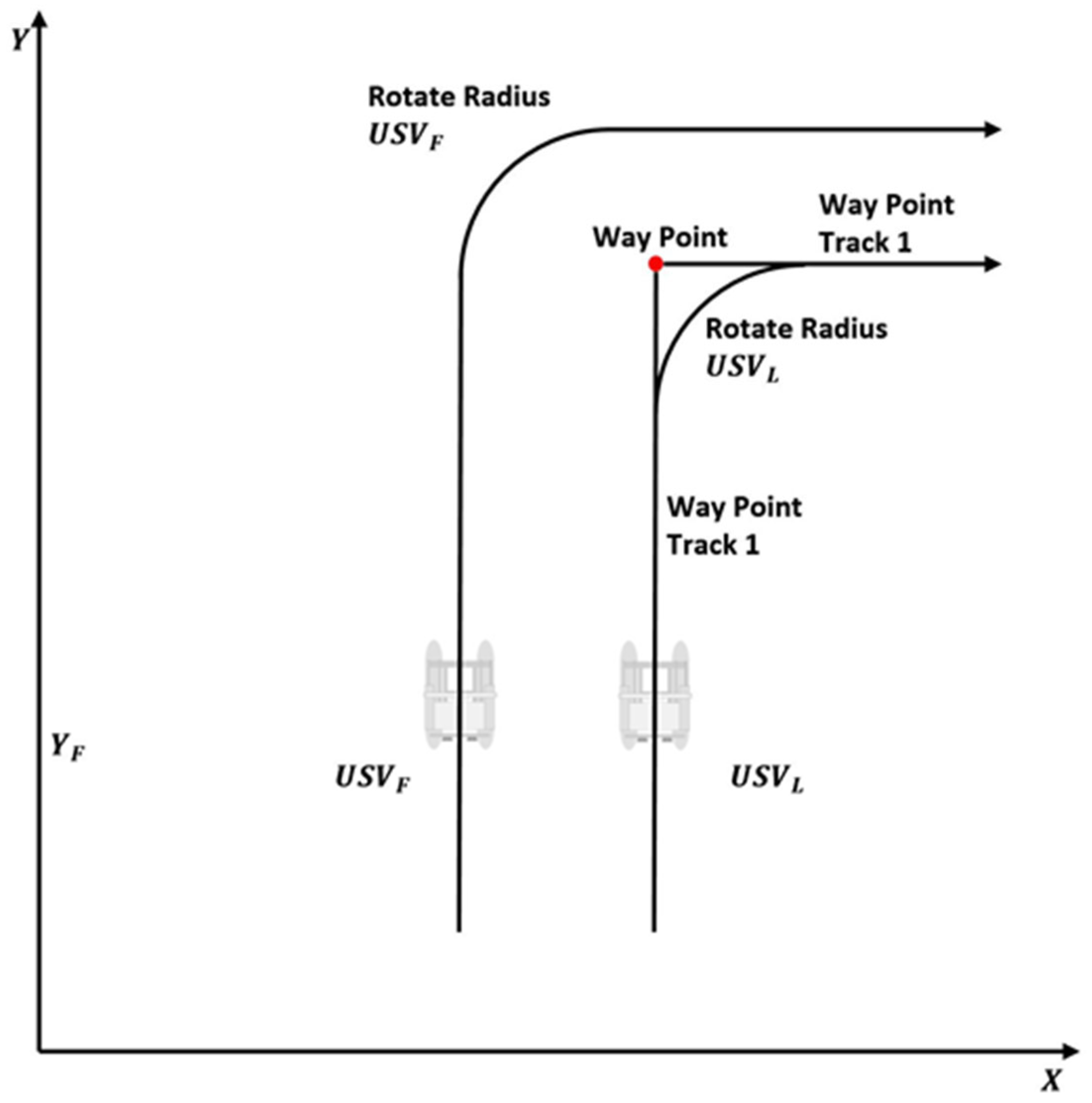
4.1.2. Virtual Point Based on Waypoint
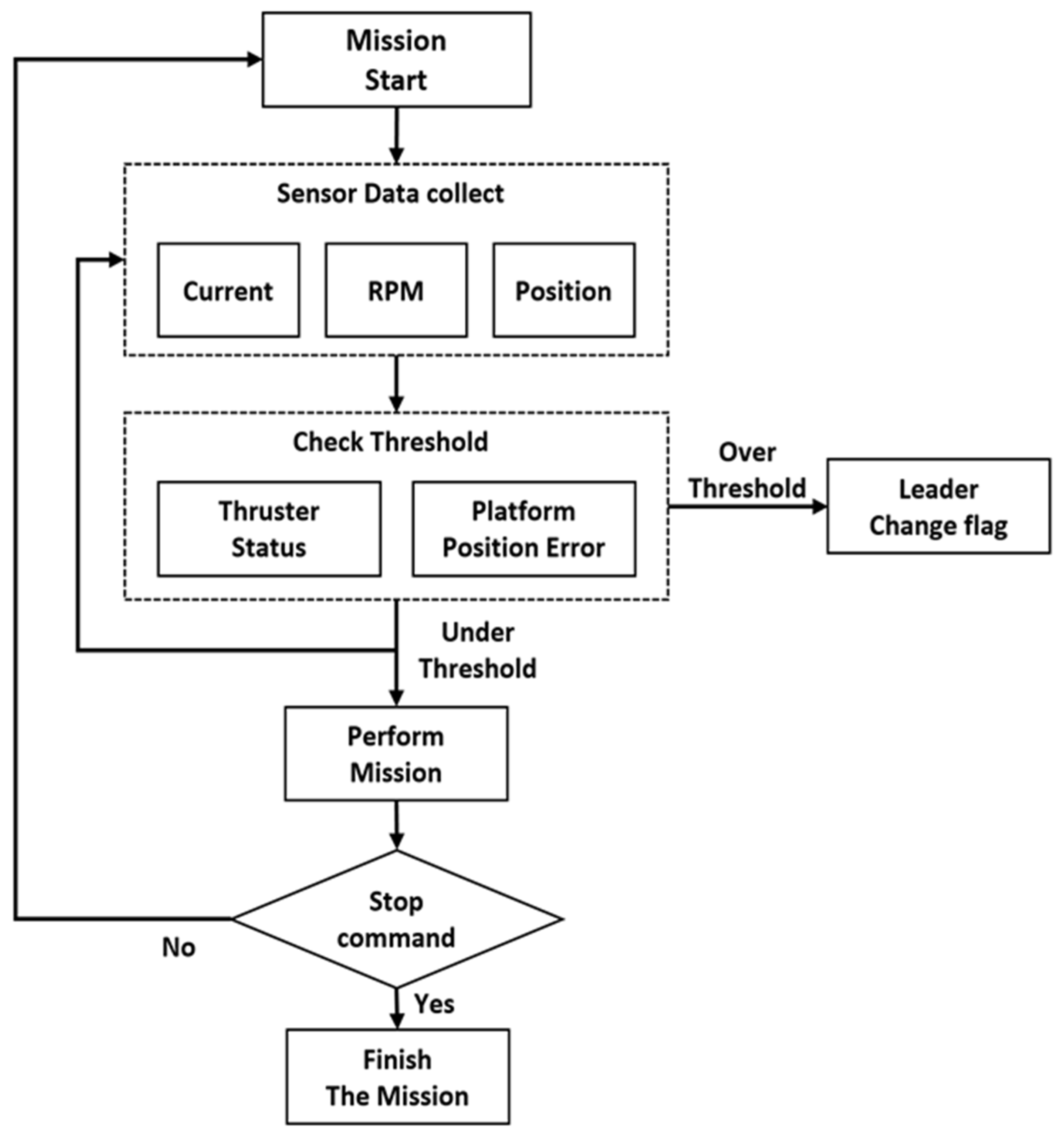
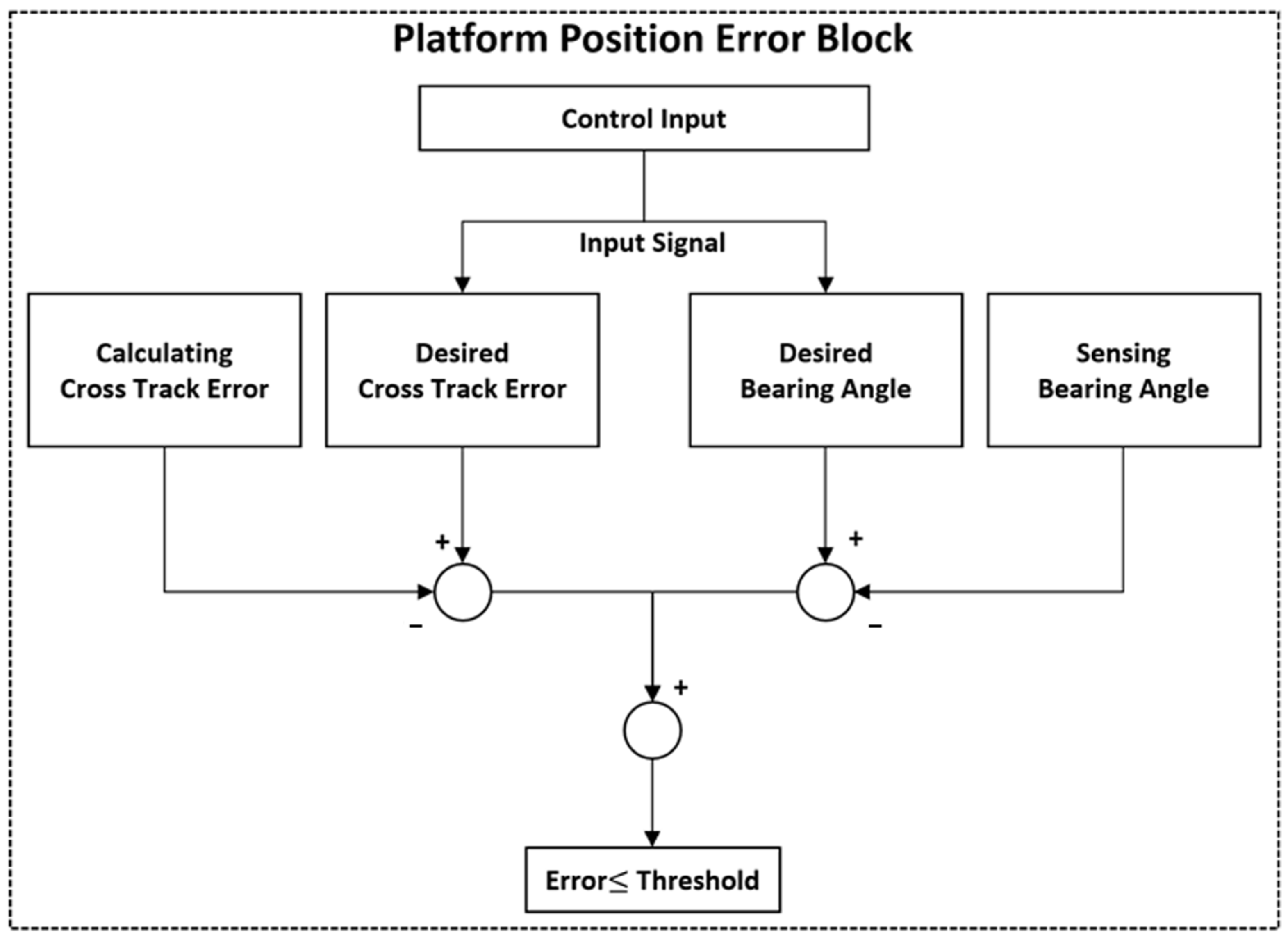
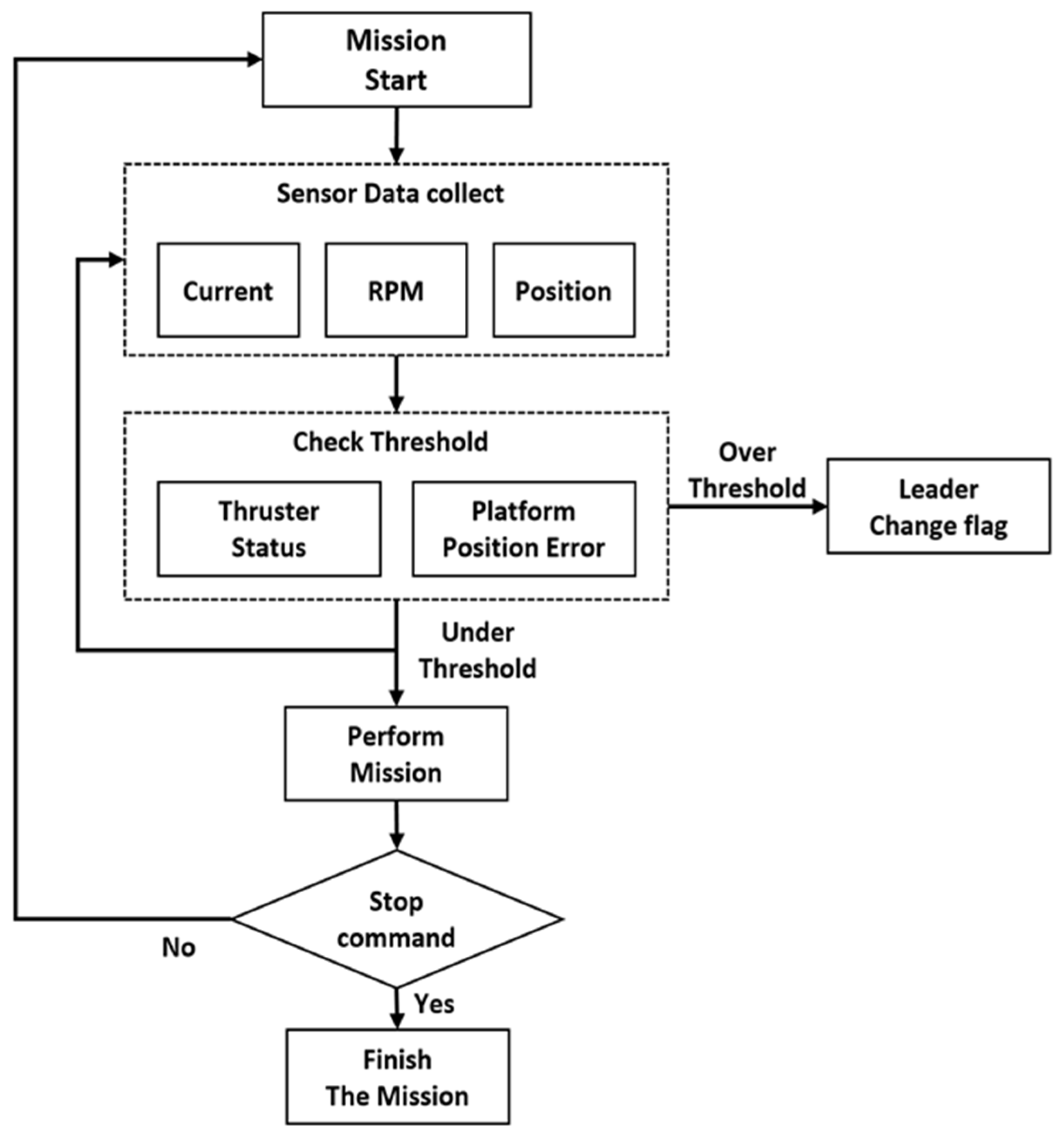
4.2. Fault-Coping Algorithm
5. Experiments in Actual Maritime Area
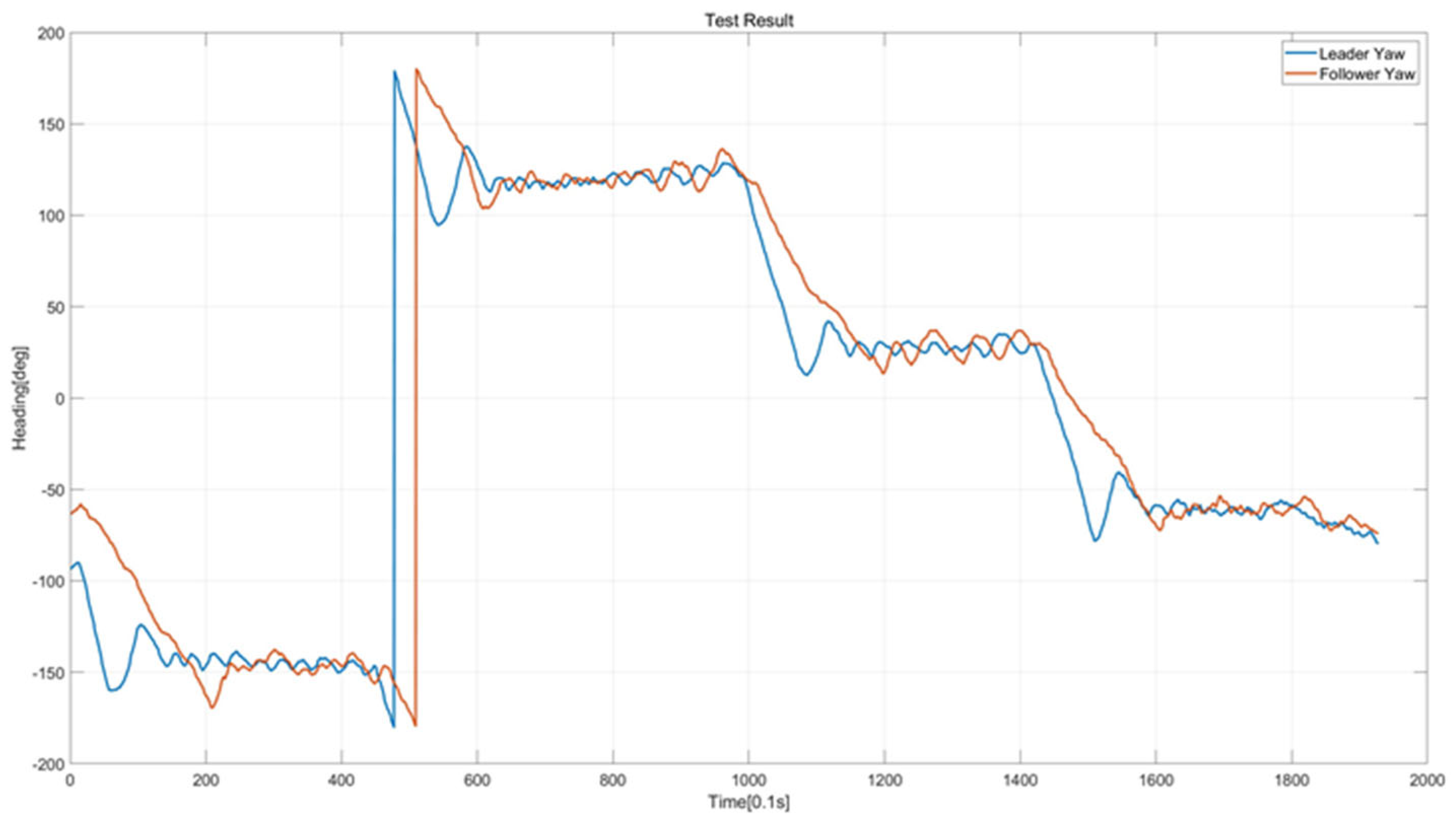
5.1. Leader–Follower Swarm-Control Algorithm Performance Test
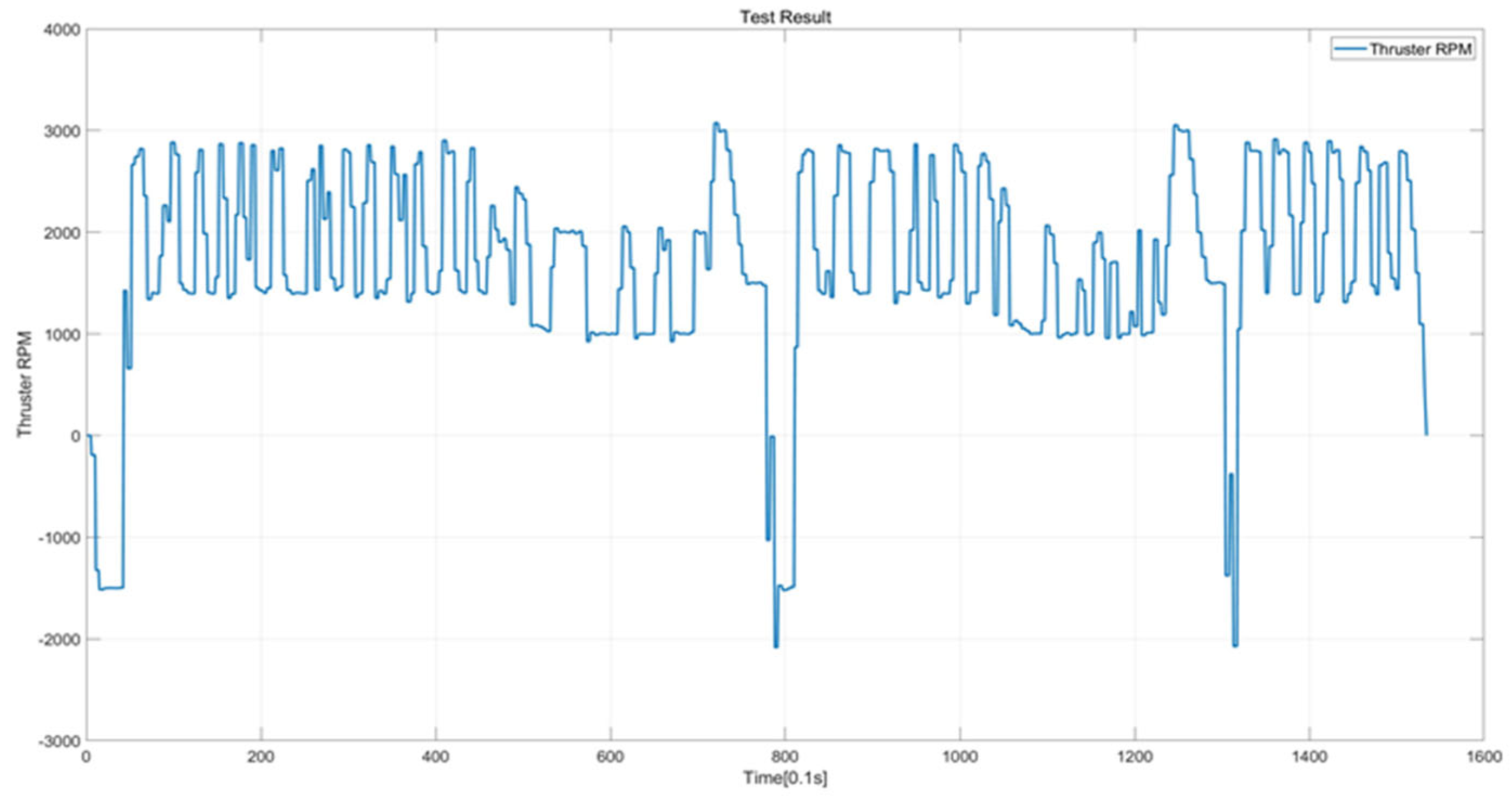
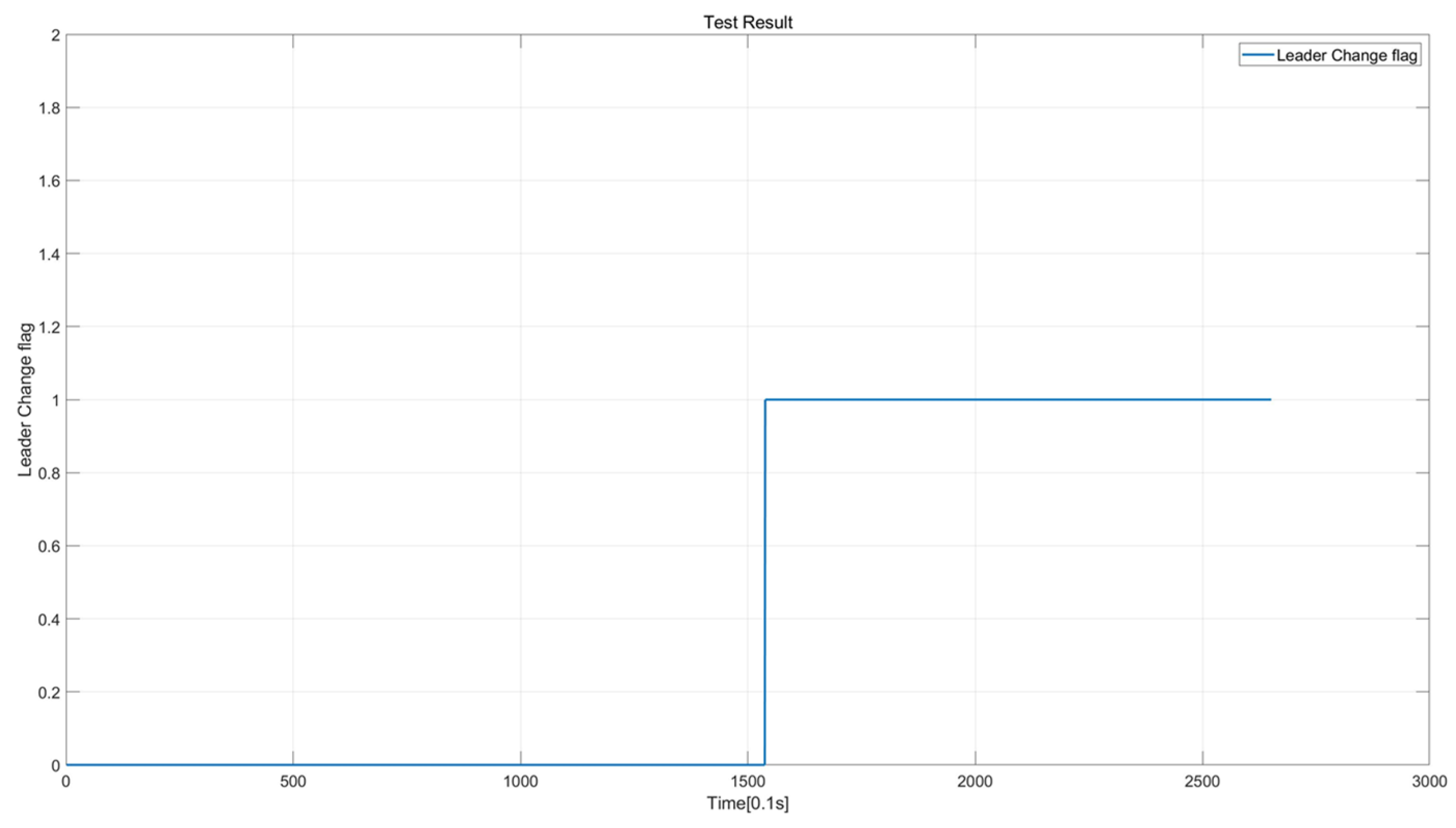
5.2. Fault-Coping Algorithm Performance Test
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cruz, D.; Mcclintock, J.; Perteet, B.; Orqueda, A.A.O.; Cao, Y.; Fierro, R. Decentralized cooperative control—A multivehicle platform for research in networked embedded systems. IEEE Control Syst. 2007, 27, 58–78. [Google Scholar] [CrossRef]
- Feddema, J.T.; Lewis, C.; Schoenwald, D.A. Decentralized control of cooperative robotic vehicles: Theory and application. IEEE Trans. Robot. Autom. 2002, 18, 852–864. [Google Scholar] [CrossRef]
- Gu, Y.; Seanor, B.; Campa, G.; Napolitano, M.R.; Rowe, L.; Gururajan, S.; Wan, S. Design and flight testing evaluation of formation control laws. IEEE Trans. Control Syst. Technol. 2006, 14, 1105–1112. [Google Scholar] [CrossRef]
- Sallama, A.; Abbod, M.; Khan, S.M. Applying sequential particle swarm optimization algorithm to improve power generation quality. Int. J. Eng. Technol. Innov. 2014, 4, 223. [Google Scholar]
- Lee, K.R. Design of Decentralized Behavior-Based Network for the Formation Control and the Obstacle Avoidance of Multiple Robots. Ph.D. Thesis, Ajou University, Suwon-si, Republic of Korea, 2018. [Google Scholar]
- Park, S.B.; Park, J.H. A Study on Formation Control Algorithms of Multi-obstacles Collision Avoidance for Autonomous Navigation of Swarm Marine Unmanned Moving Vehicles. J. KNST 2020, 3, 56–61. [Google Scholar] [CrossRef]
- Lee, S.J.; Hong, S.K. Leader robot controller considering follower with input constraint. Trans. Korean Inst. Electr. Eng. 2012, 61, 1032–1040. [Google Scholar] [CrossRef]
- Tak, M.H.; Kim, J.S.; Joo, Y.H.; Ji, S.H. Formation Control for the Obstacle Avoidance of Swarm Robots Based Leader-Follower Robots; The Korean Institute of Electrical Engineers: Seoul, Republic of Korea, 2013; Volume 10, pp. 171–172. [Google Scholar]
- Wu, C.-J. 6-DoF Modelling and Control of a Remotely Operated Vehicle. Master’s Thesis, Flinders University, Adelaide, SA, Australia, 2018. [Google Scholar]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; John Wiley & Sons: Hoboken, NJ, USA, 1994. [Google Scholar]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Moon, S.T.; Lee, H.B.; Kim, P.J. Convergence research review. Converg. Res. Policy Cent. 2020, 6. [Google Scholar]
- Lawton, J.R.T.; Beard, R.W.; Young, B.J. A decentralized approach to formation maneuvers. IEEE Trans. Robot Auton. Syst. 2003, 55, 191–204. [Google Scholar] [CrossRef]
- Iwasaki, M.; Matusi, N. Robust speed control of IM with torque feed forward control. IEEE Trans. Ind. Electron. 1993, 40, 553–560. [Google Scholar] [CrossRef]
- Chen, Y.; Liu, Y.; Meng, S.Y.; Zhuang, Y. System modeling and simulation of an unmanned aerial underwater vehicle. J. Mar. Sci. Eng. 2019, 7, 444. [Google Scholar] [CrossRef]
- Rodriguez, J.; Castaneda, H.; Gordilo, J.L. Design of an adaptive sliding mode control for a micro-AUV subject to water currents and parametric uncertainties. J. Mar. Sci. Eng. 2019, 7, 445. [Google Scholar] [CrossRef]
- Dierks, T.; Jagannathan, S. Control of nonholonomic mobile robot formation: Back stepping kinematics into dynamics. In Proceedings of the IEEE Multi-Conference System Control, Suntec City, Singapore, 1–3 October 2007. [Google Scholar]
- Kanayama, Y.; Kimura, Y.; Miyazaki, F.; Noguchi, T. A stable tracking control method for an autonomous mobile robot. In Proceedings of the IEEE International Conference Robotics and Automation, Cincinnati, OH, USA, 13–18 May 1990. [Google Scholar] [CrossRef]
- Lee, S.J. Leader Robot Controller Considering Follower with Input Constraint. Master’s Thesis, Ajou University, Suwon-si, Republic of Korea, 2012. [Google Scholar]
- Consolini, L.; Morbidi, F.; Prattichizzo, D.; Tosques, M. Leader-follower formation control of nonholonomic mobile robots with input constraints. Automatica 2008, 44, 1343–1349. [Google Scholar] [CrossRef]
- Lee, J.H.; Jeong, S.K.; Ji, D.H.; Park, H.Y.; Kim, D.Y.; Choo, K.B.; Jung, D.W.; Kim, M.J.; Oh, M.H.; Choi, H.S. Unmanned surface vehicle using a leader-follower swarm control algorithm. Appl. Sci. 2023, 13, 3120. [Google Scholar] [CrossRef]
- Choi, I.S. Range Finder Based Leader-Follower Formation Control of Multiple Mobile Robot in Outdoor Environments. Master’s Thesis, Korea University, Seoul, Republic of Korea, 2013. [Google Scholar]
- Zanoli, S.M.; Astolfi, G.; Bruzzone, G.; Bibuli, M.; Caccia, M. Application of Fault Detection and Isolation Techniques on an Unmanned Surface Vehicle(USV). In Proceedings of the IFAC Conference on Maneuvering and Control of Marine Craft, Arenzano, Italy, 19–21 September 2012. [Google Scholar] [CrossRef]
- Cho, H.J.; Choi, H.S.; Kim, H.J.; Nam, K.S.; Ryu, J.D.; Ha, K.N. Feature selection for unmanned surface vehicle fault diagnosis research and experimental verification. J. Inst. Control. Robot. Syst. 2022, 28, 542–550. [Google Scholar] [CrossRef]
- Choo, K.B.; Cho, H.J.; Park, J.H.; Huang, J.; Jung, D.W.; Lee, J.H.; Jeong, S.K.; Yoon, J.S.; Choo, J.H.; Choi, H.S. A research on fault diagnosis of a USV thruster based on PCA and entropy. Appl. Sci. 2023, 13, 3344. [Google Scholar] [CrossRef]
- Kim, M.J.; Cho, H.J.; Choo, K.B.; Huang, J.; Jung, K.W.; Park, J.H.; Lee, J.H.; Jeong, S.K.; Ji, D.H.; Choi, H.S. Design of Underwater Thruster Fault Detection Model Based on Vibration Sensor Data: Generative Adversarial Network-Based Fault Data Expansion Approach for Data Imbalance. Sens. Mater. 2022, 34, 3213–3227. [Google Scholar] [CrossRef]
- Korea Real Time Database for NEAR-GOOS. Available online: http://www.khoa.go.kr/oceangrid/koofs/eng/observation/obs_real.do (accessed on 20 July 2021).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Force and Moments | Linear and Angular Velocities | Position and Euler Angle | |
|---|---|---|---|
| Motion in the X direction (surge) | X | u | x |
| Motion in the Y direction (sway) | Y | v | y |
| Motion in the Z direction (heave) | Z | w | z |
| Rotation about the X axis (roll) | K | p | |
| Rotation about the Y axis (pitch) | M | q | |
| Rotation about the Z axis (yaw) | N | r |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.; Ji, D.; Cho, H.; Baeg, S.; Jeong, S. Fault-Coping Algorithm for Improving Leader–Follower Swarm-Control Algorithm of Unmanned Surface Vehicles. Appl. Sci. 2024, 14, 3444. https://doi.org/10.3390/app14083444
Lee J, Ji D, Cho H, Baeg S, Jeong S. Fault-Coping Algorithm for Improving Leader–Follower Swarm-Control Algorithm of Unmanned Surface Vehicles. Applied Sciences. 2024; 14(8):3444. https://doi.org/10.3390/app14083444
Chicago/Turabian StyleLee, Jihyeong, Daehyeong Ji, Hyunjoon Cho, Saehun Baeg, and Sangki Jeong. 2024. "Fault-Coping Algorithm for Improving Leader–Follower Swarm-Control Algorithm of Unmanned Surface Vehicles" Applied Sciences 14, no. 8: 3444. https://doi.org/10.3390/app14083444
APA StyleLee, J., Ji, D., Cho, H., Baeg, S., & Jeong, S. (2024). Fault-Coping Algorithm for Improving Leader–Follower Swarm-Control Algorithm of Unmanned Surface Vehicles. Applied Sciences, 14(8), 3444. https://doi.org/10.3390/app14083444