
A New Surrogate Safety Measure Considering Temporal–Spatial Proximity and Severity of Potential Collisions


Abstract
1. Introduction
1.1. Surrogate Safety Measures
1.2. Conflict Analysis in Freeway Merging Areas
2. Methodology
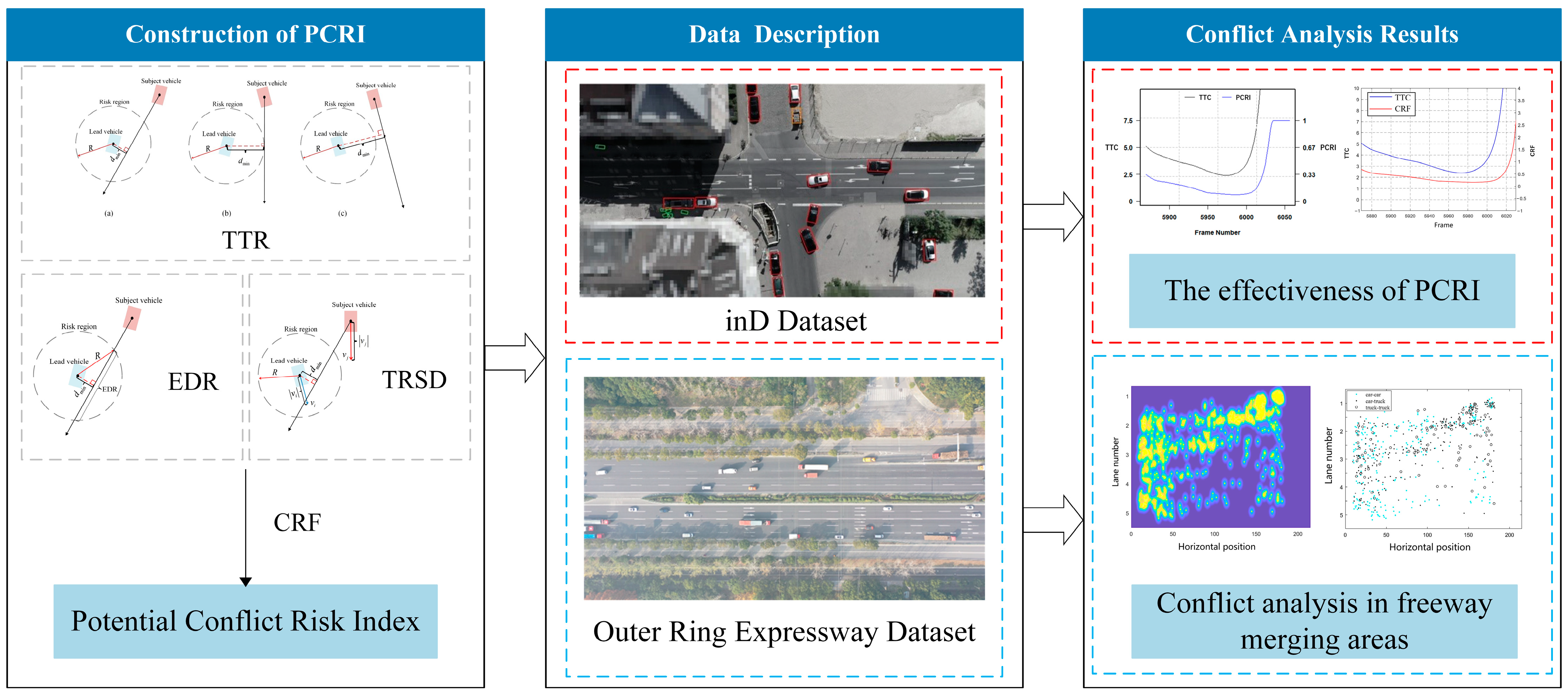
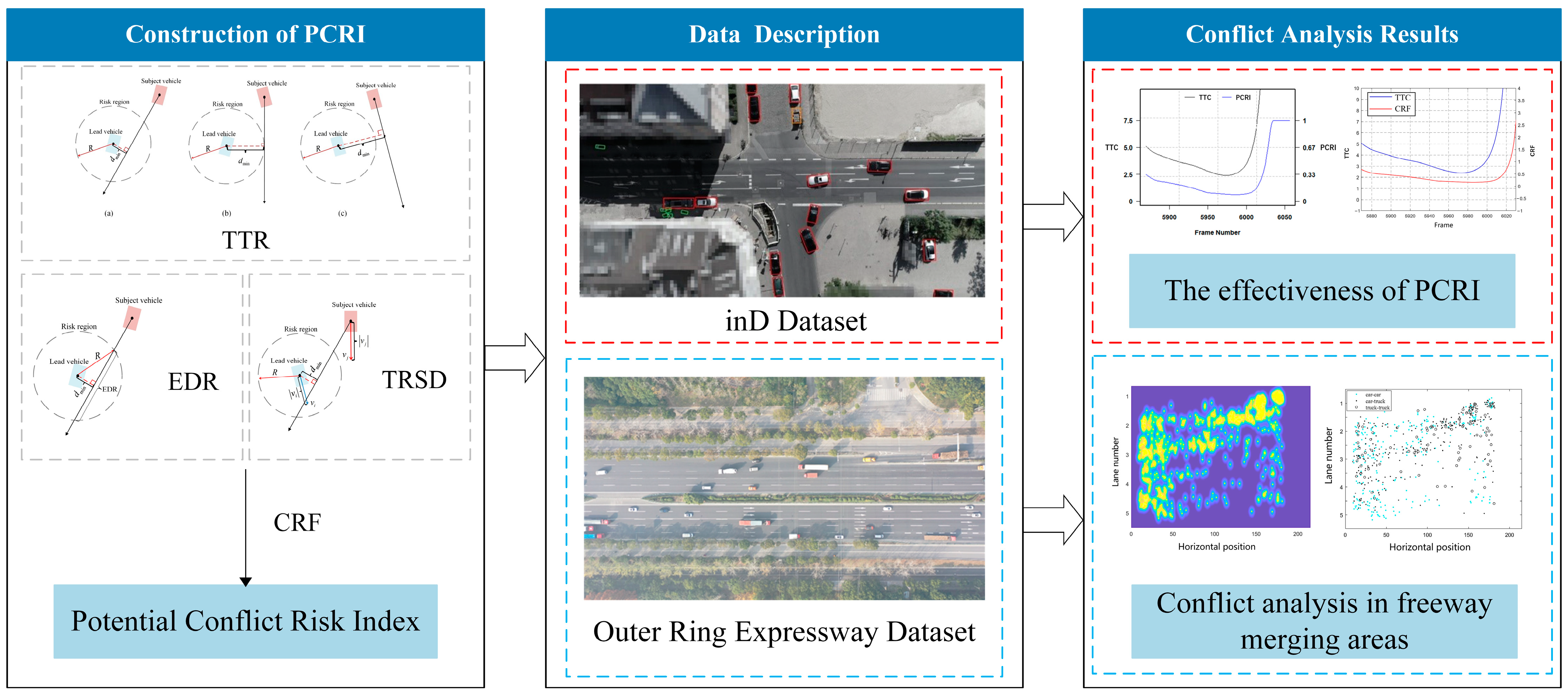
2.1. Whole Framework
2.2. Time-to-Collison
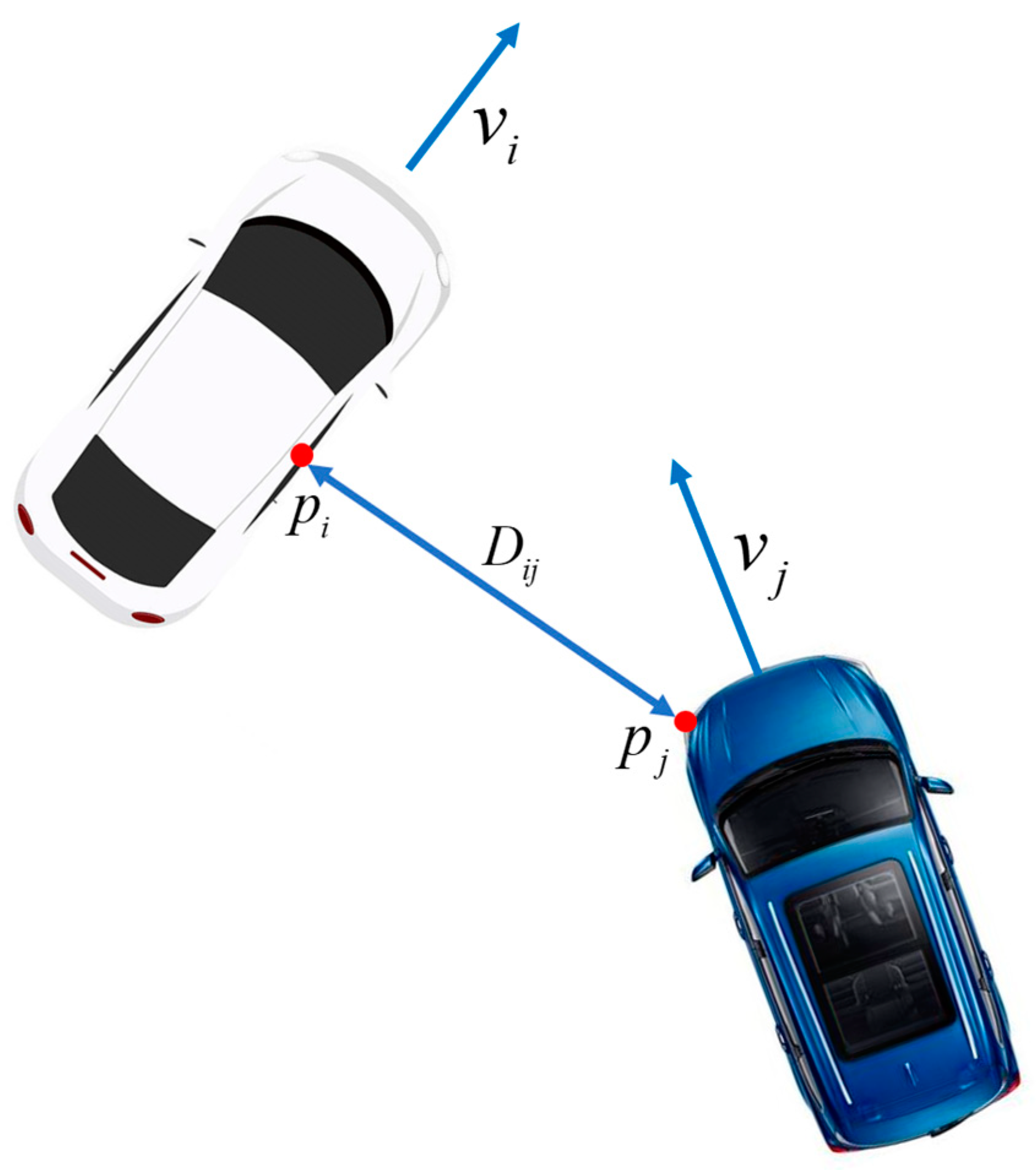
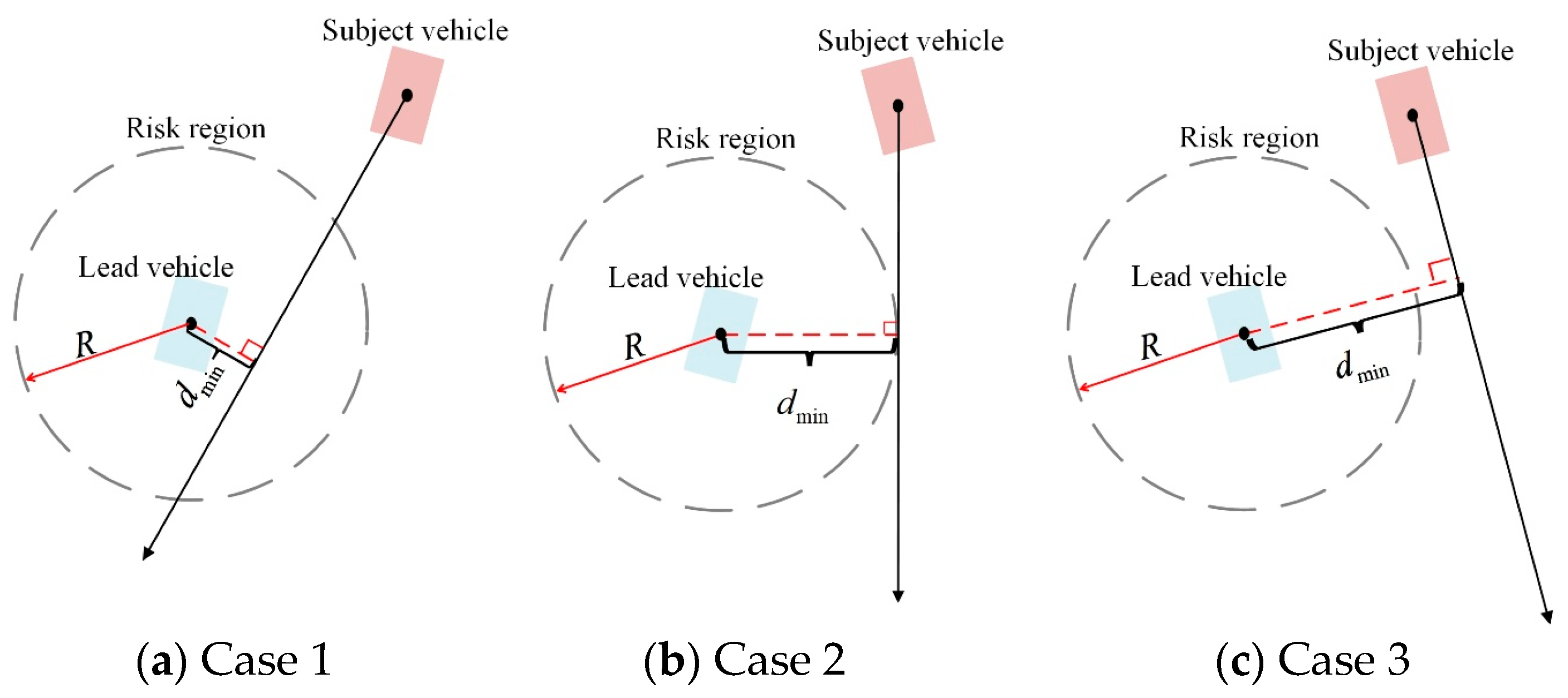
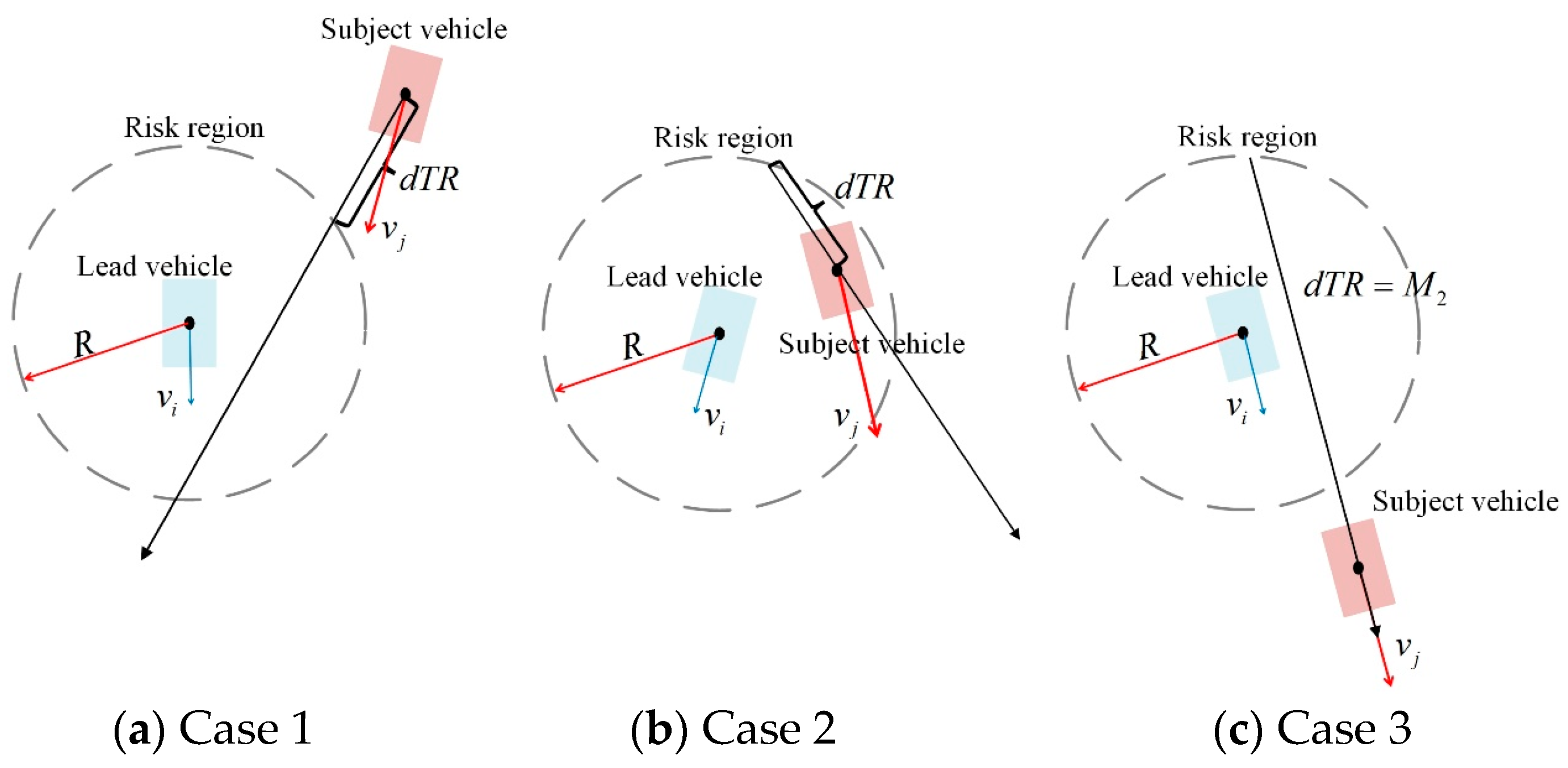
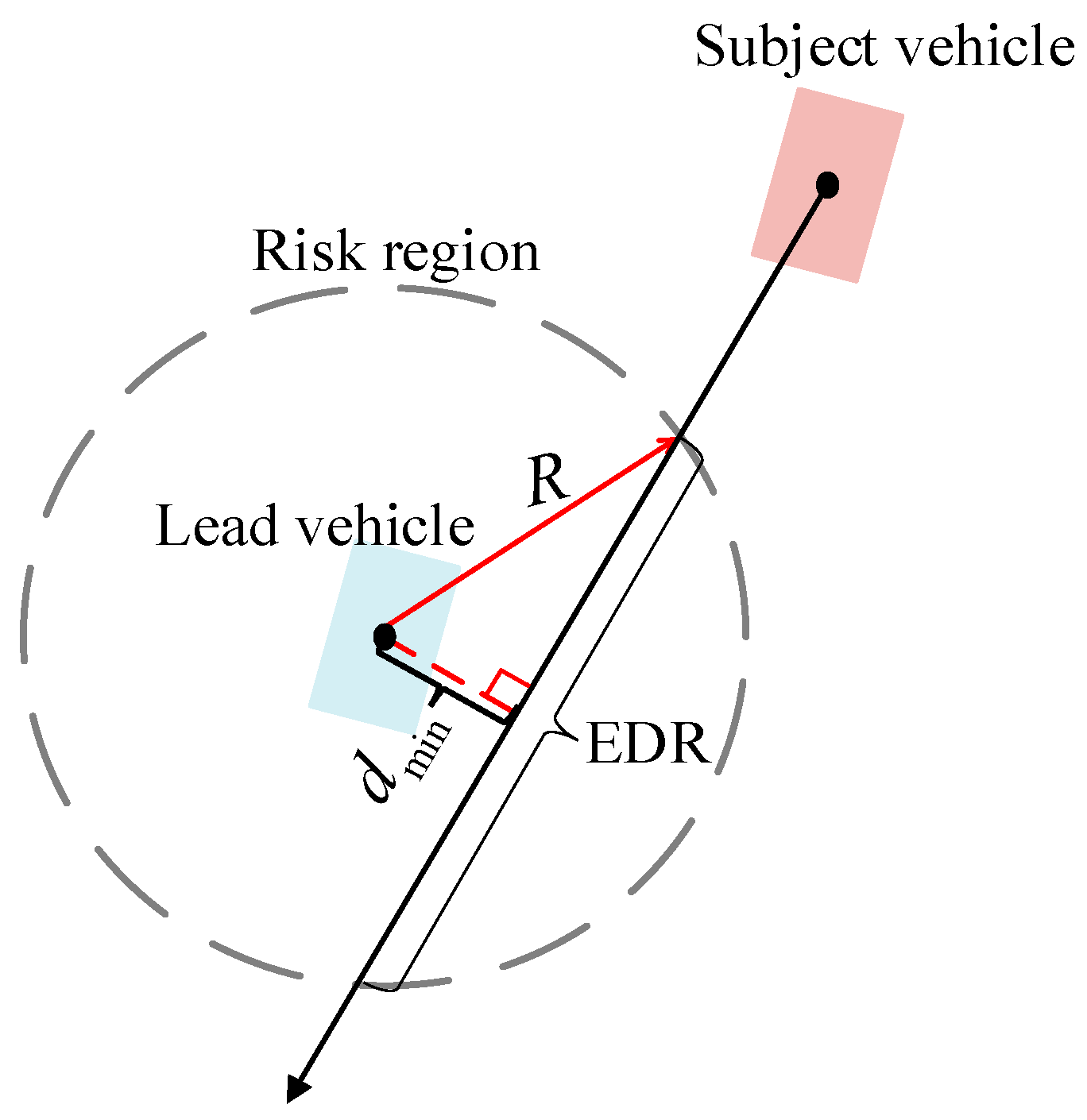
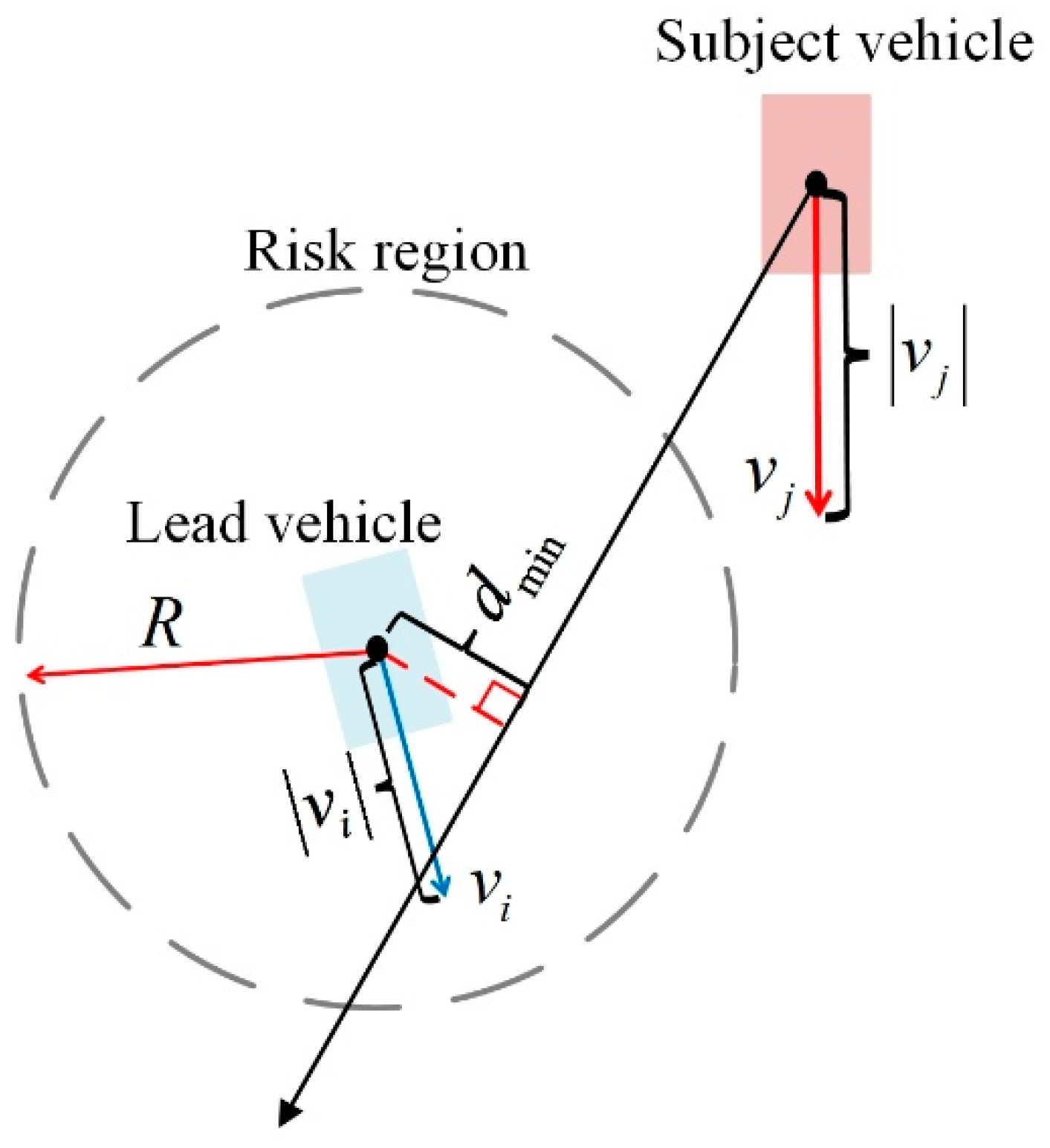
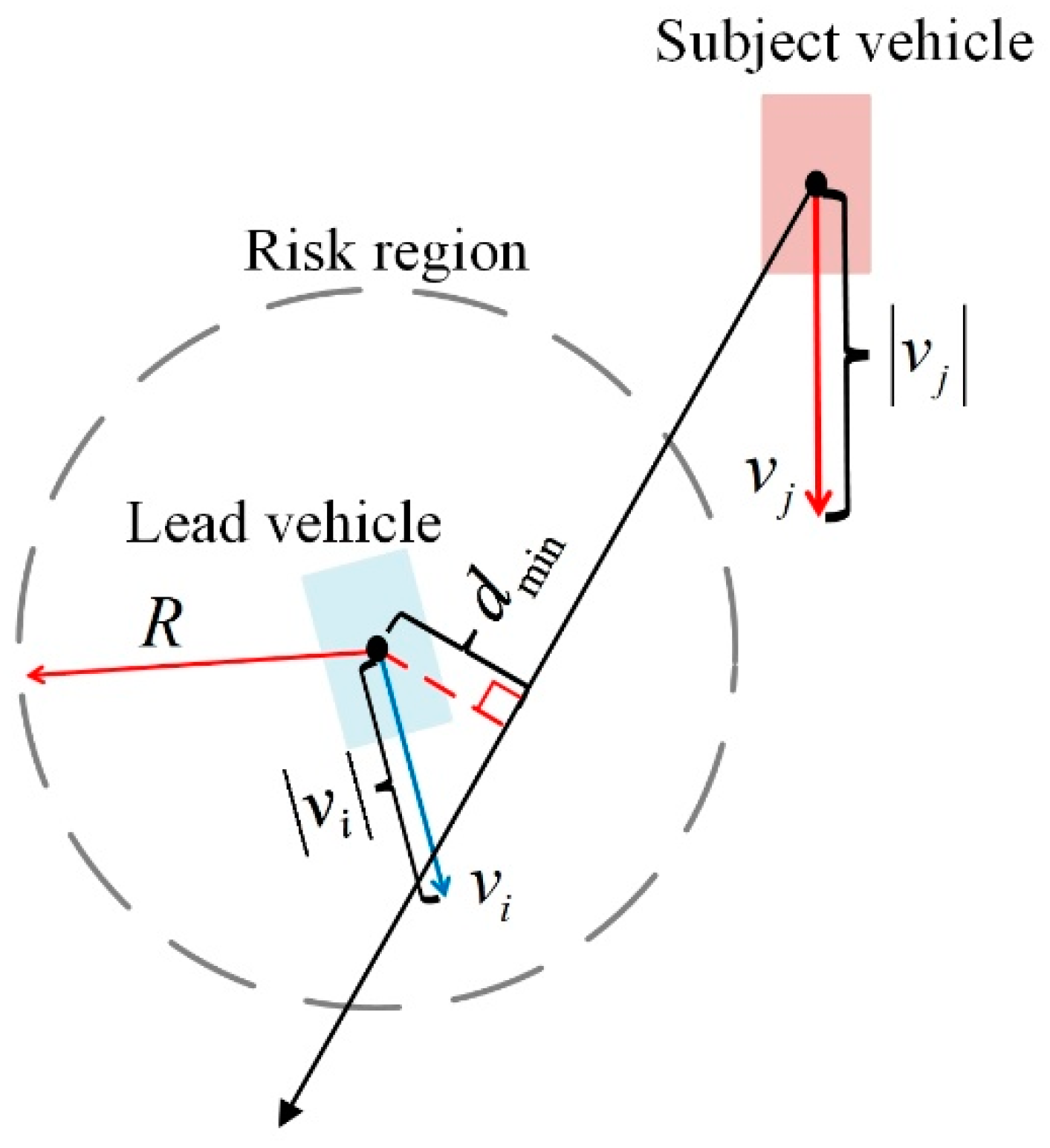
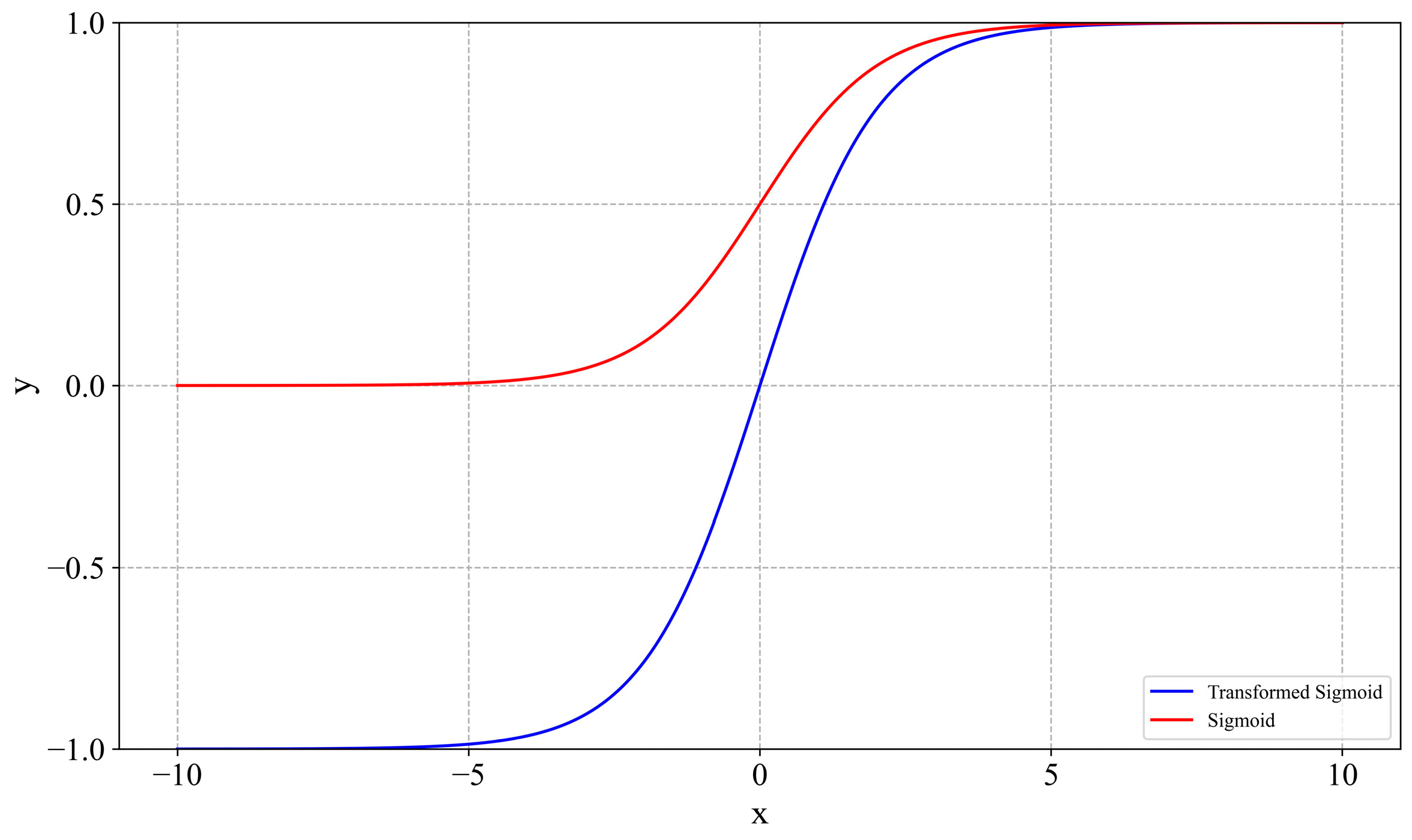
2.3. Potential Conflict Risk Index
3. Data Description
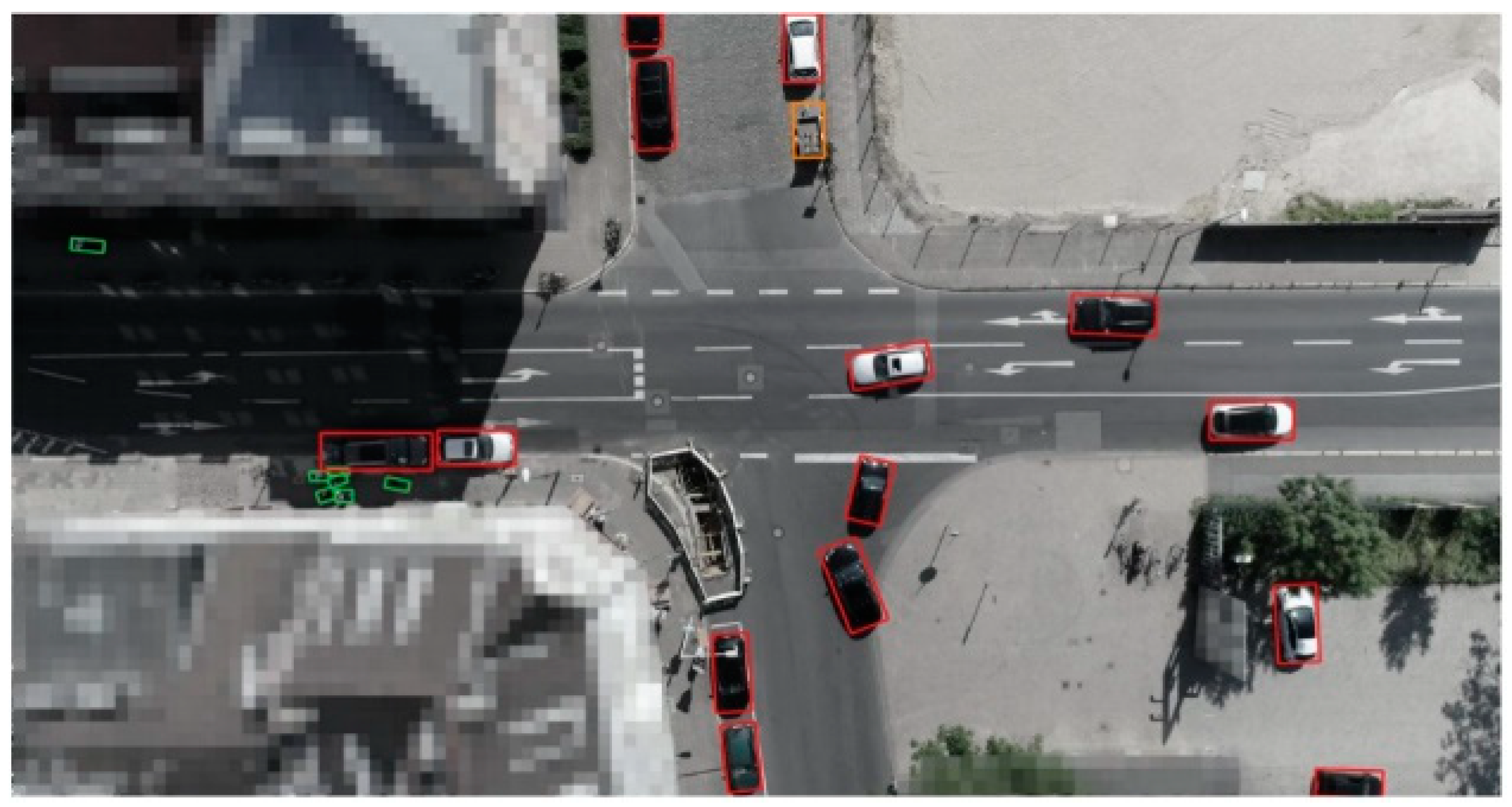
3.1. The inD Dataset
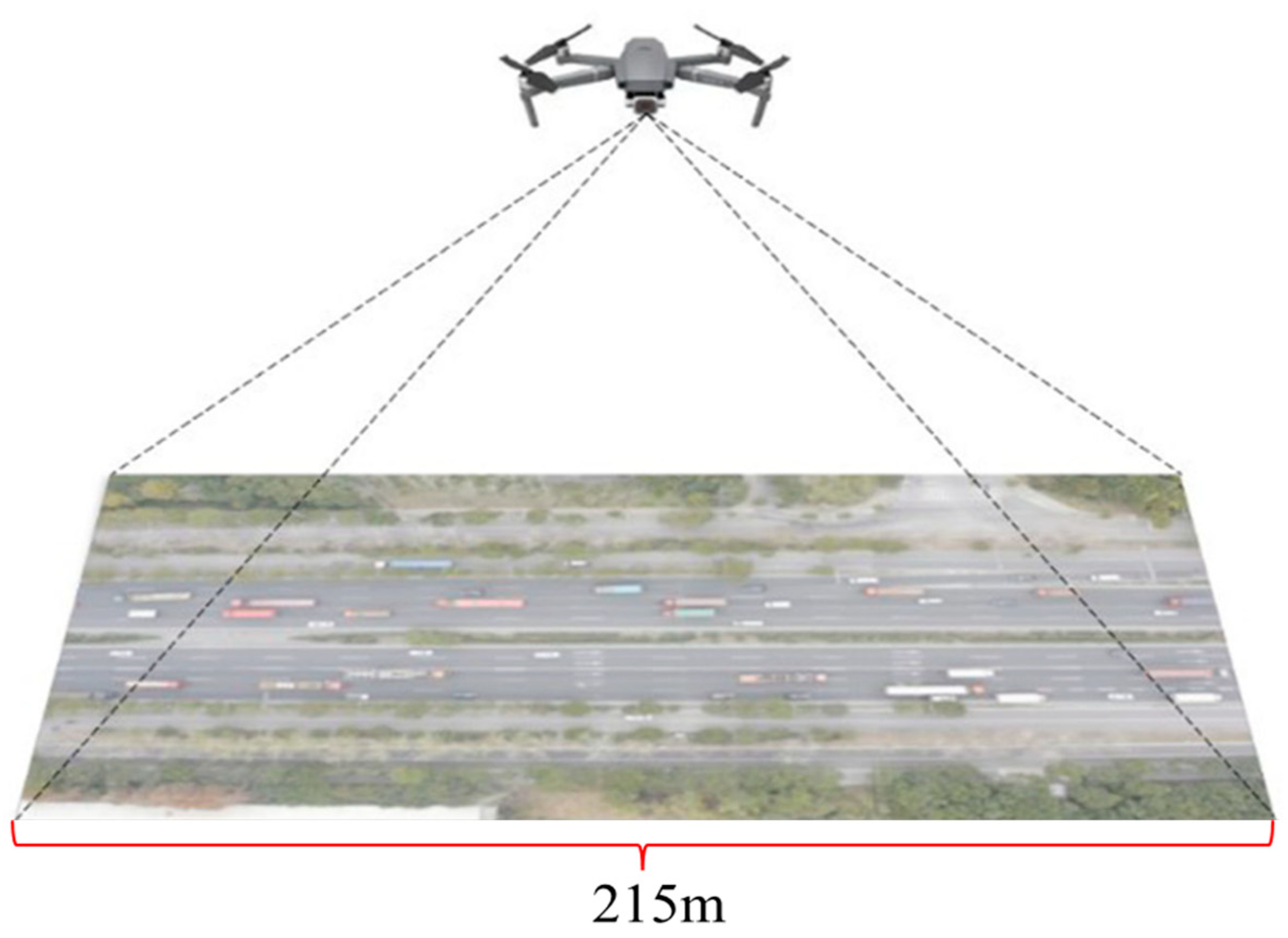
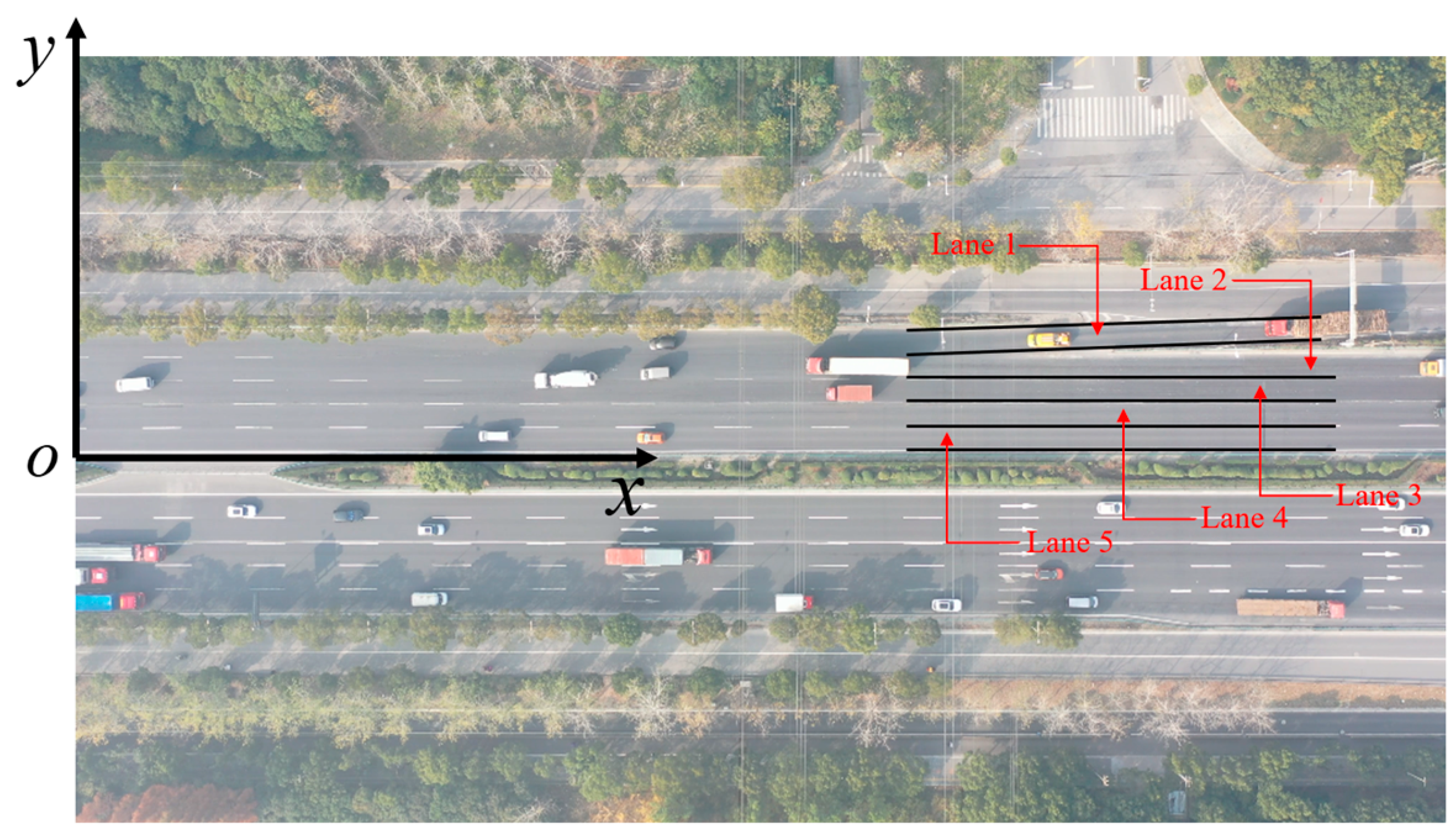
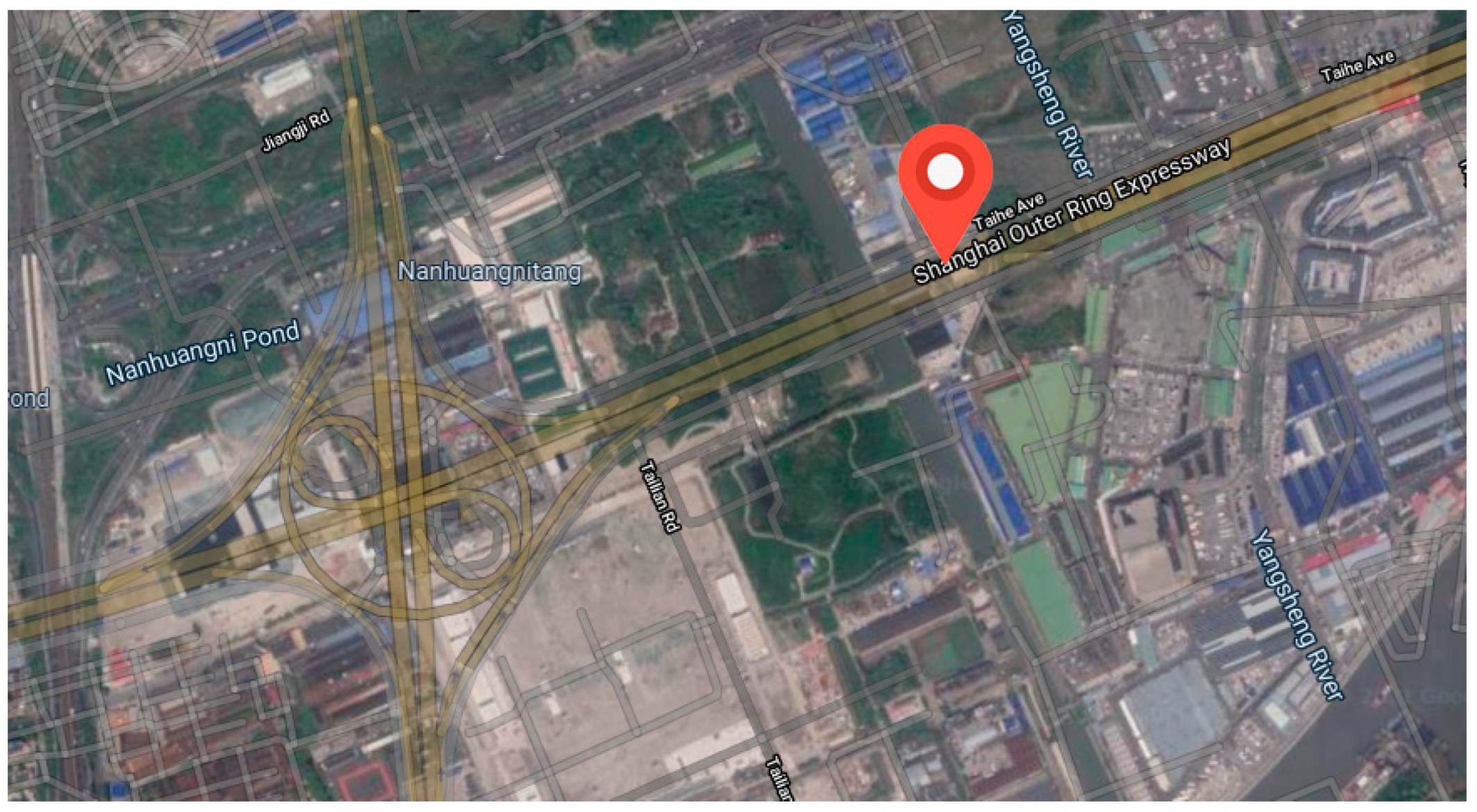
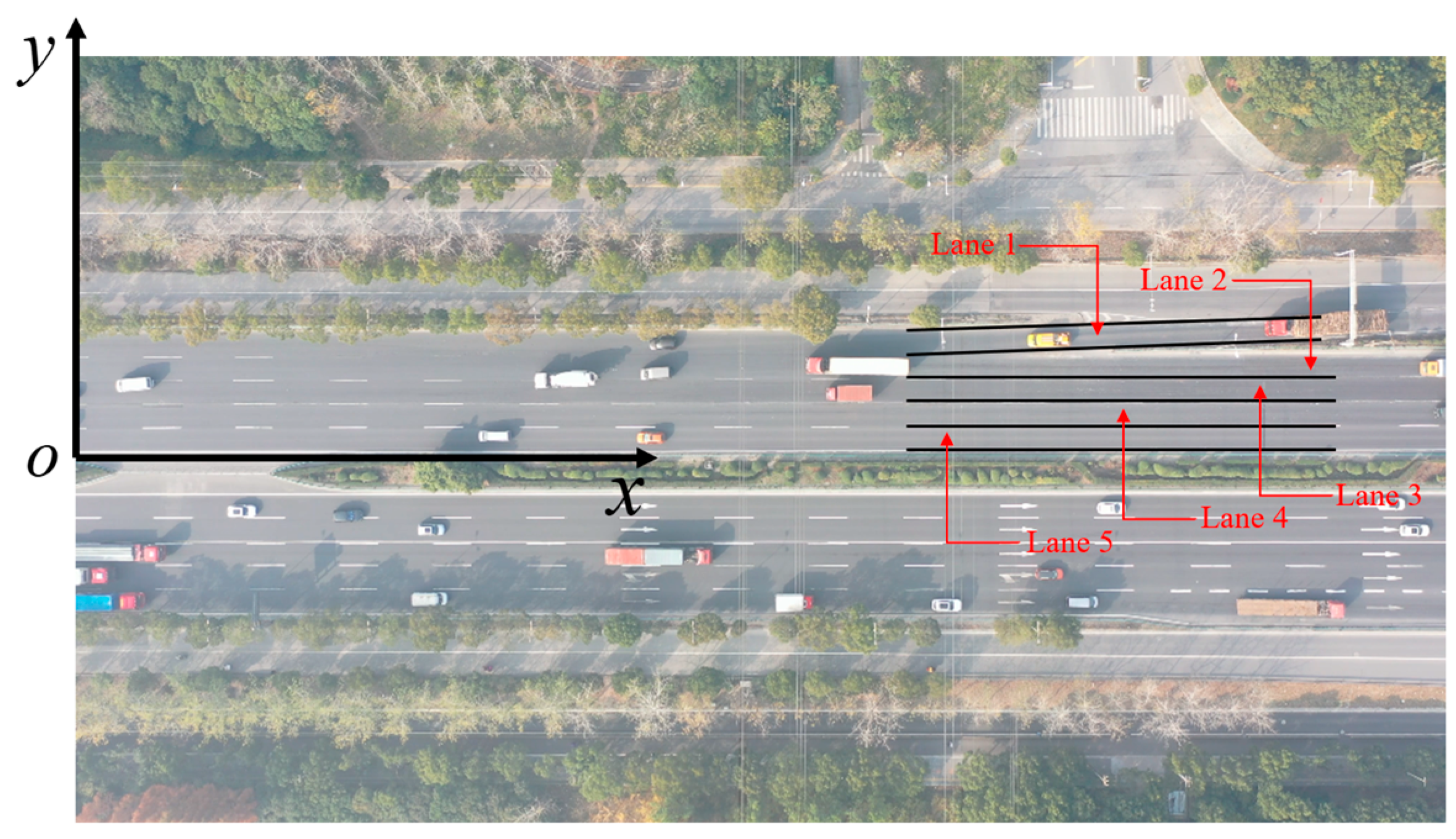
3.2. The Outer Ring Expressway Dataset
4. Results
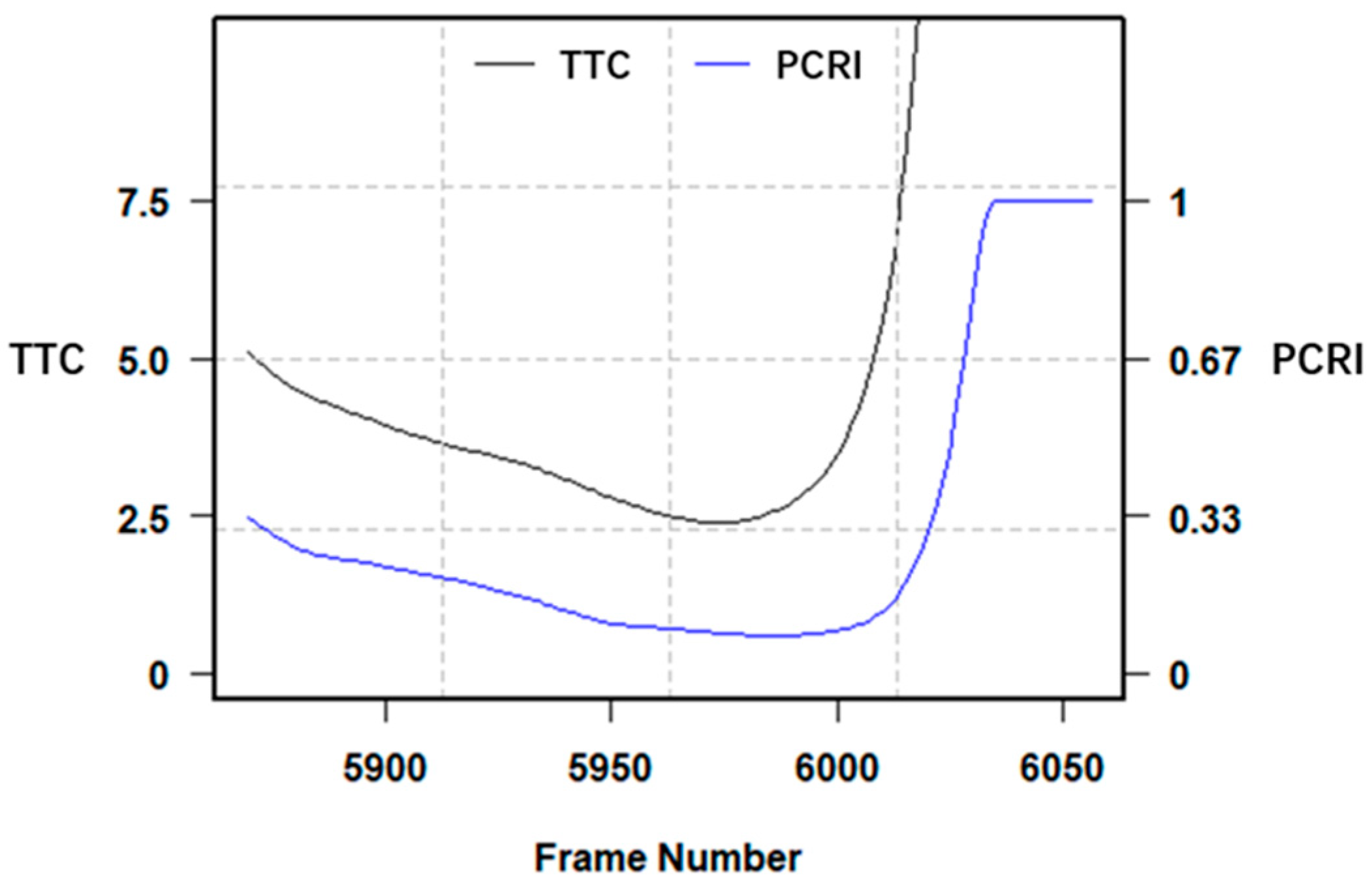
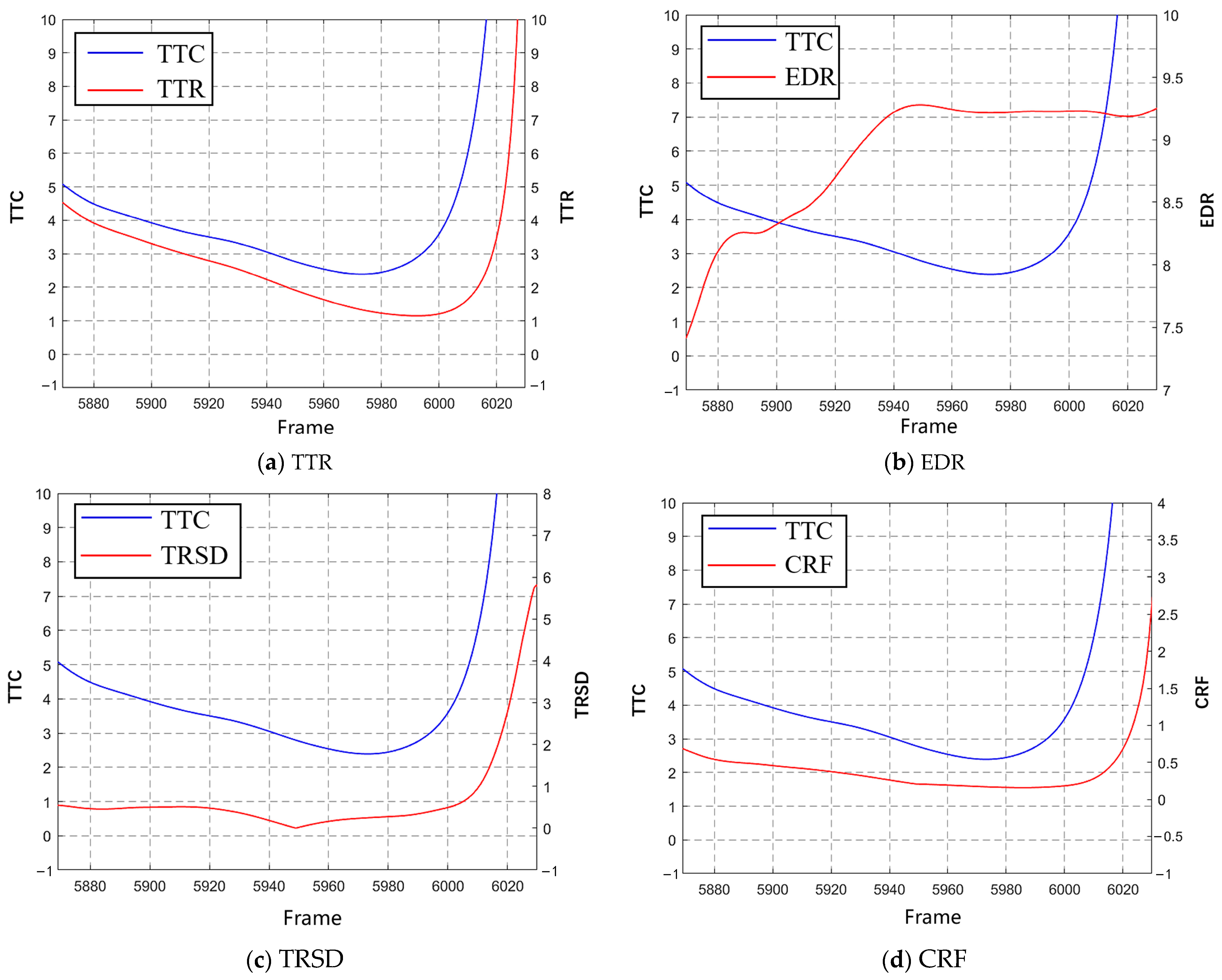
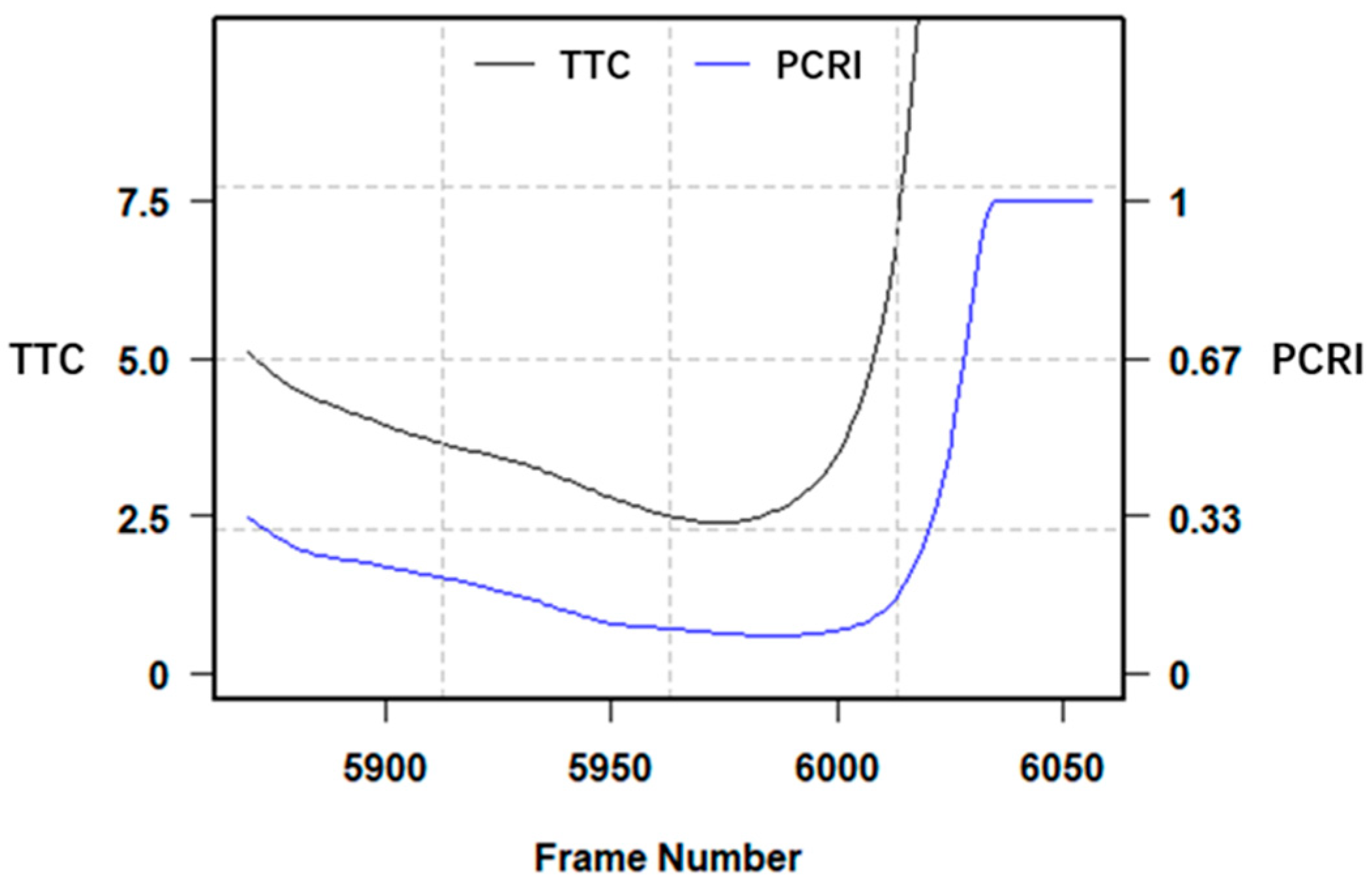
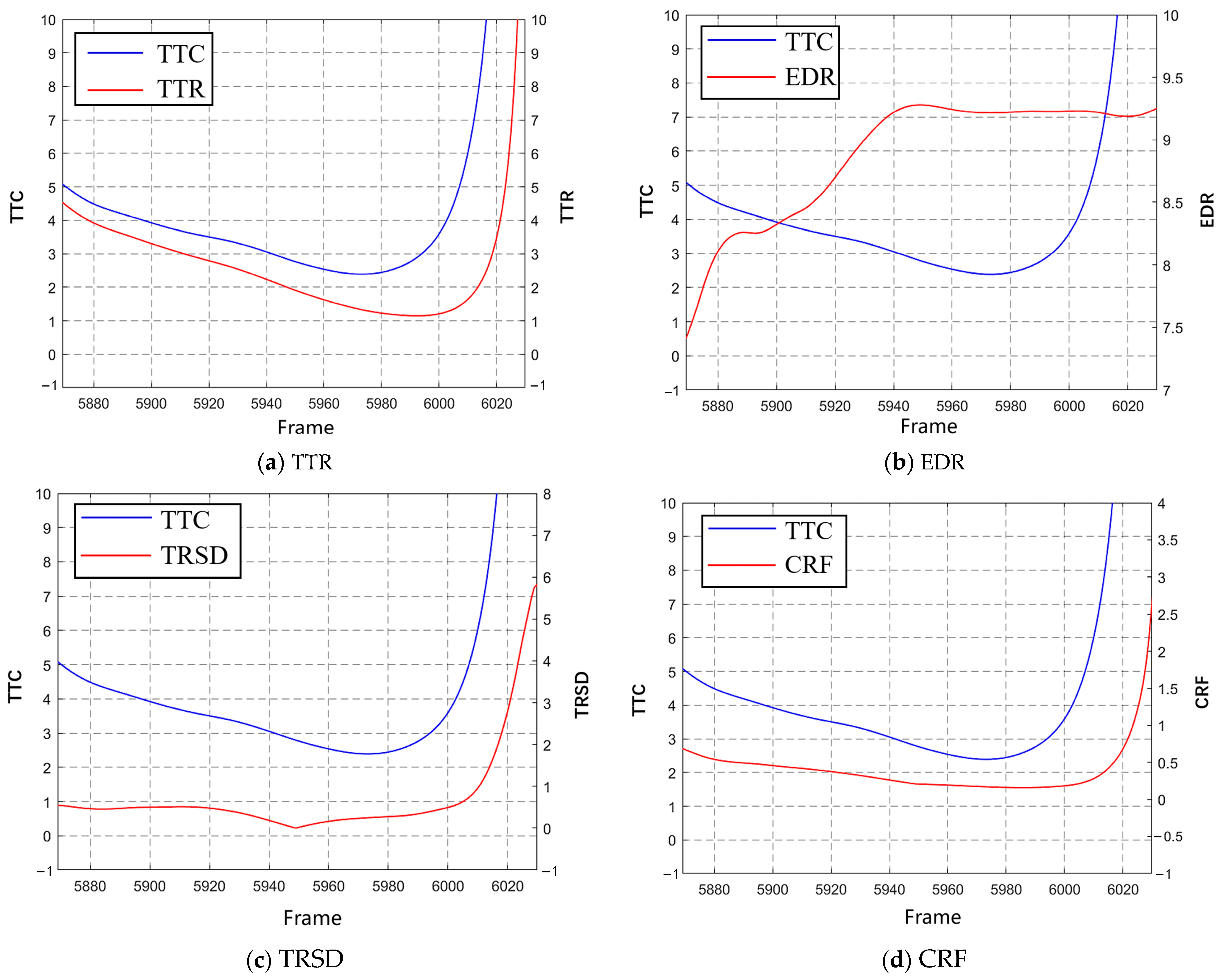
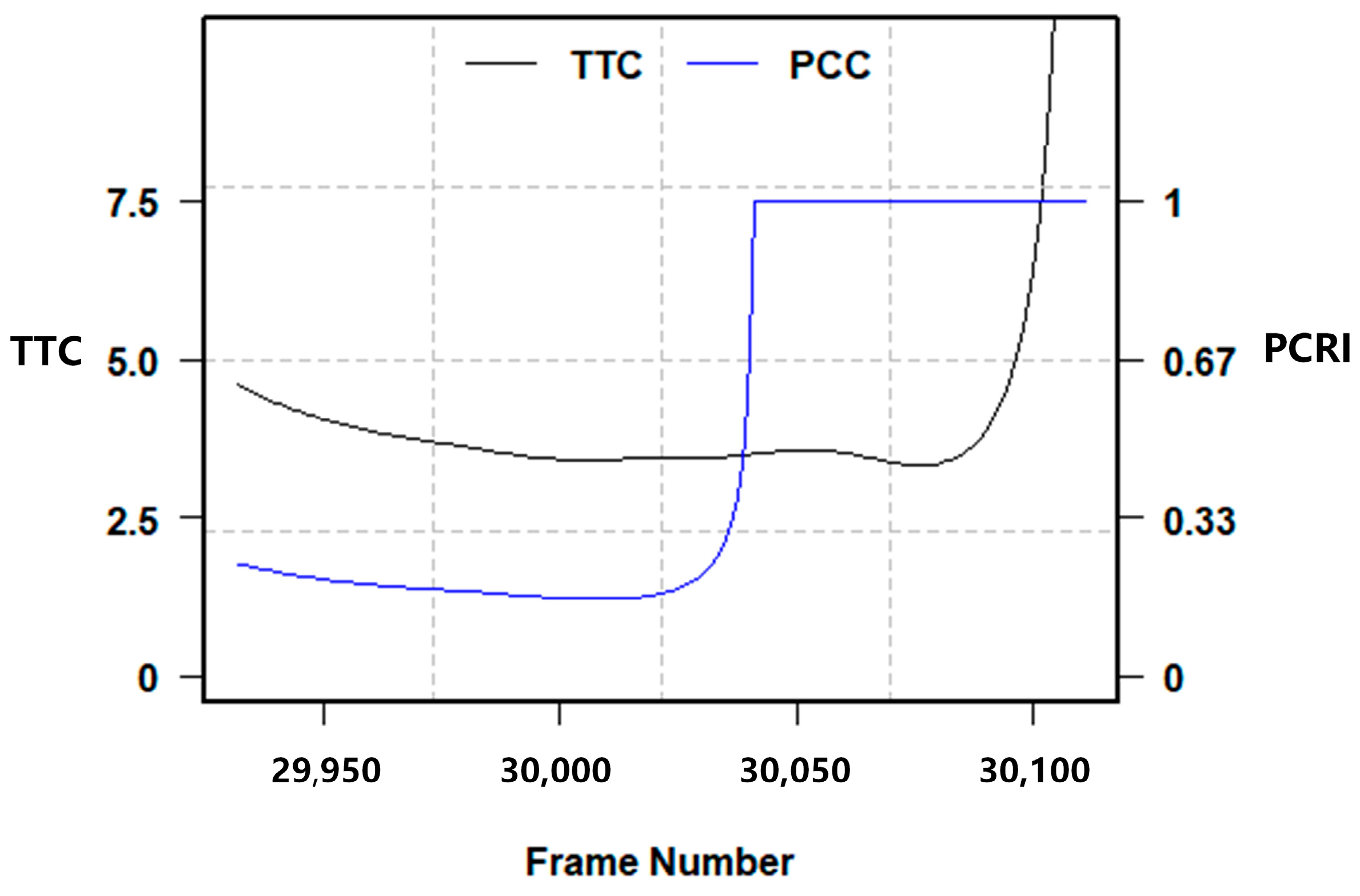
4.1. The Validation of PCRI’s Effectiveness Using the inD Dataset
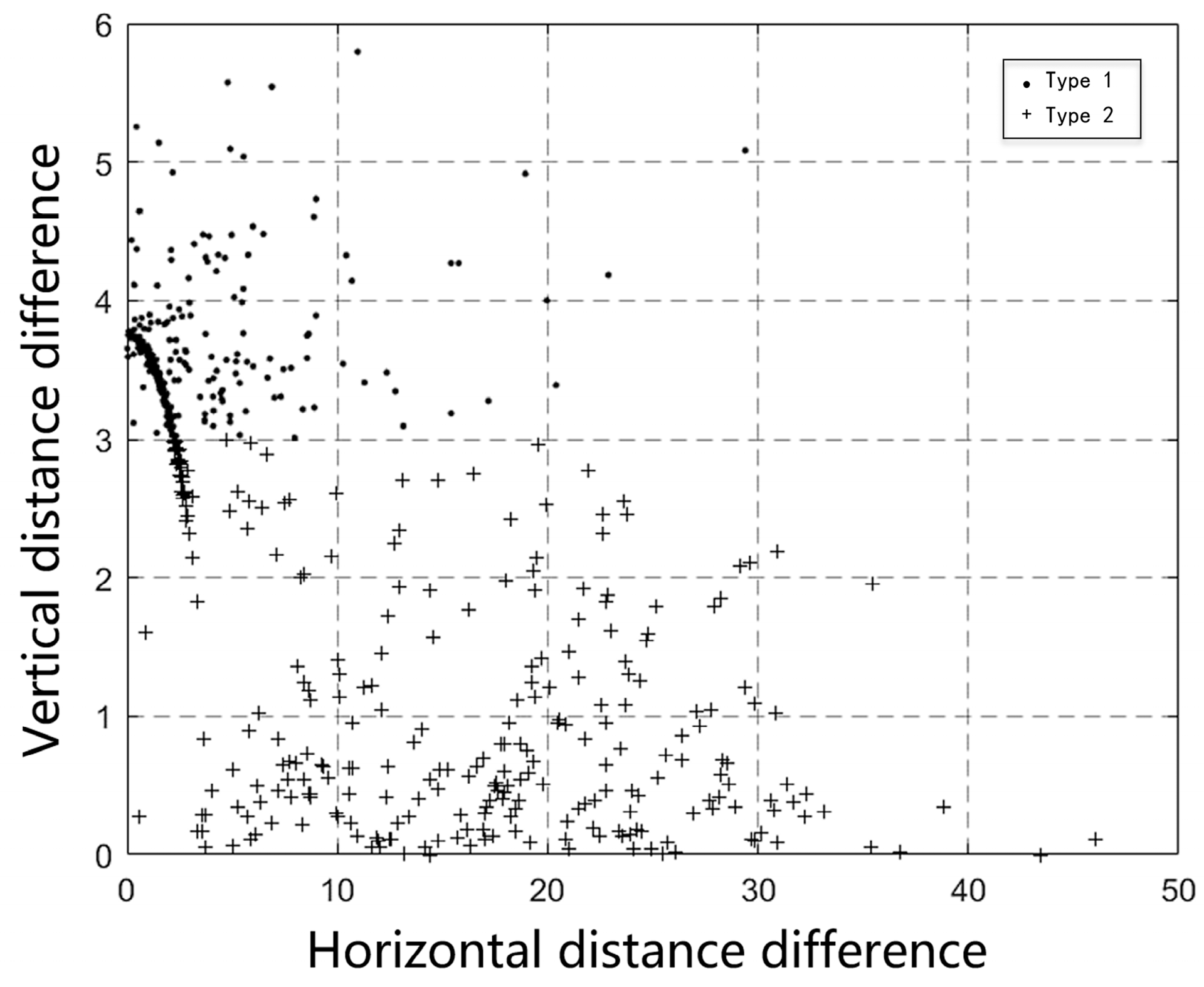
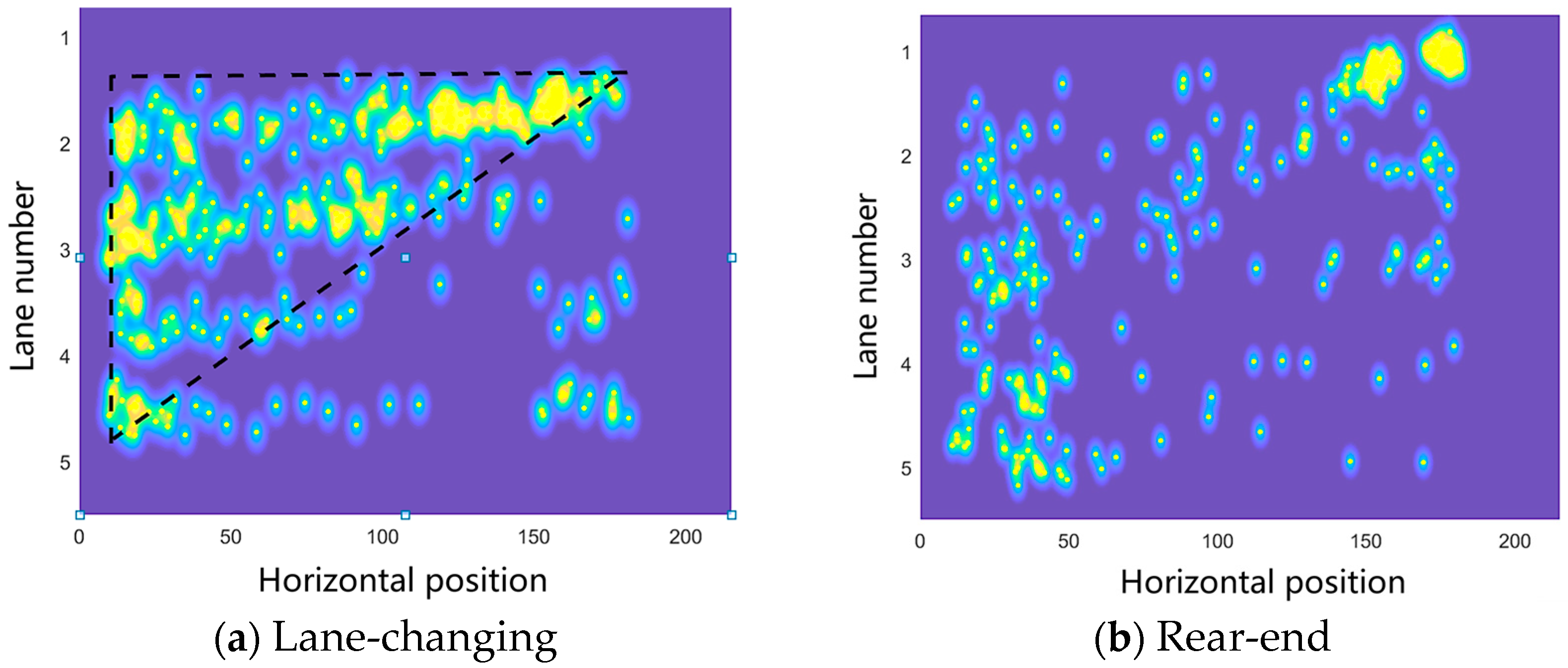
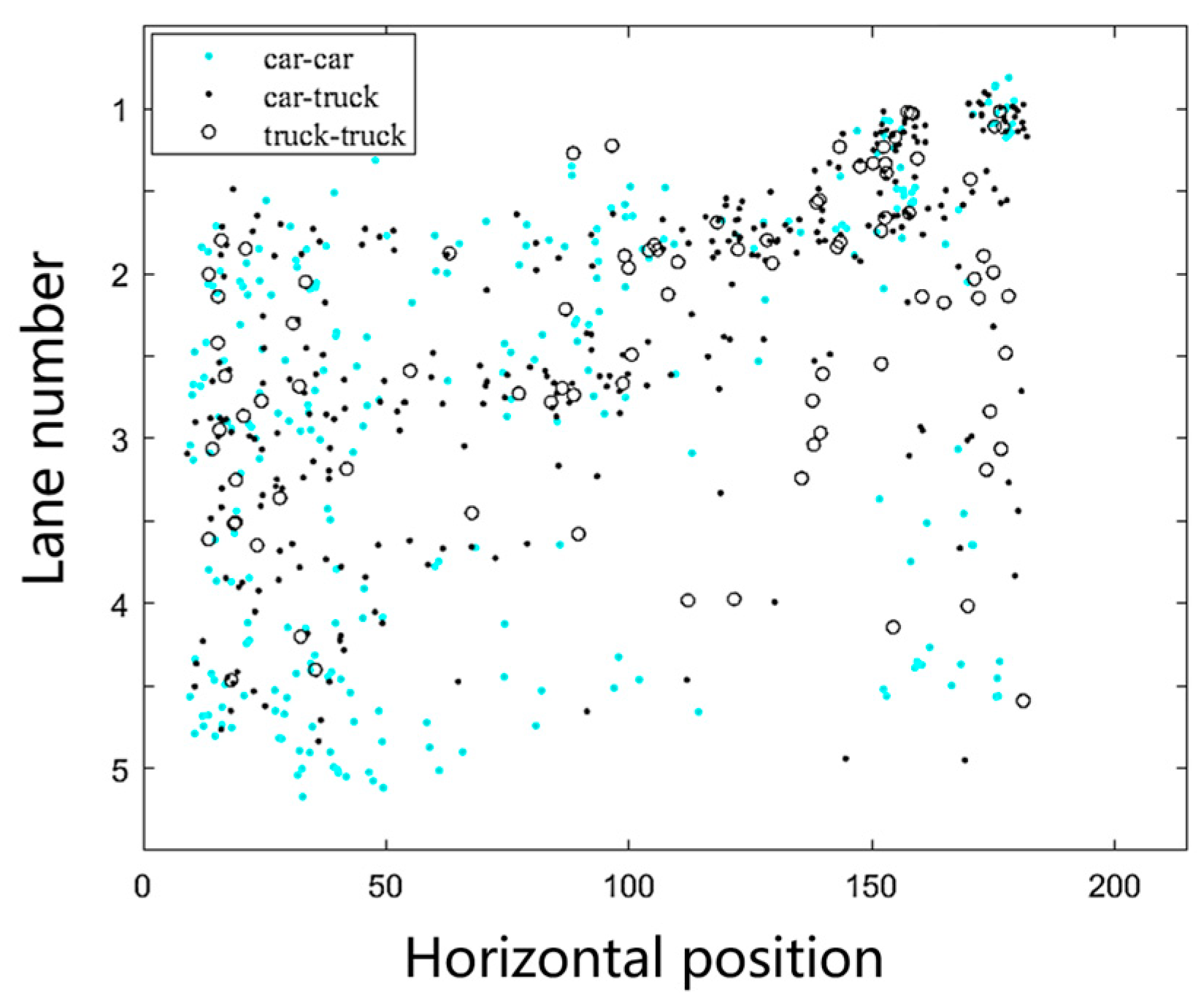
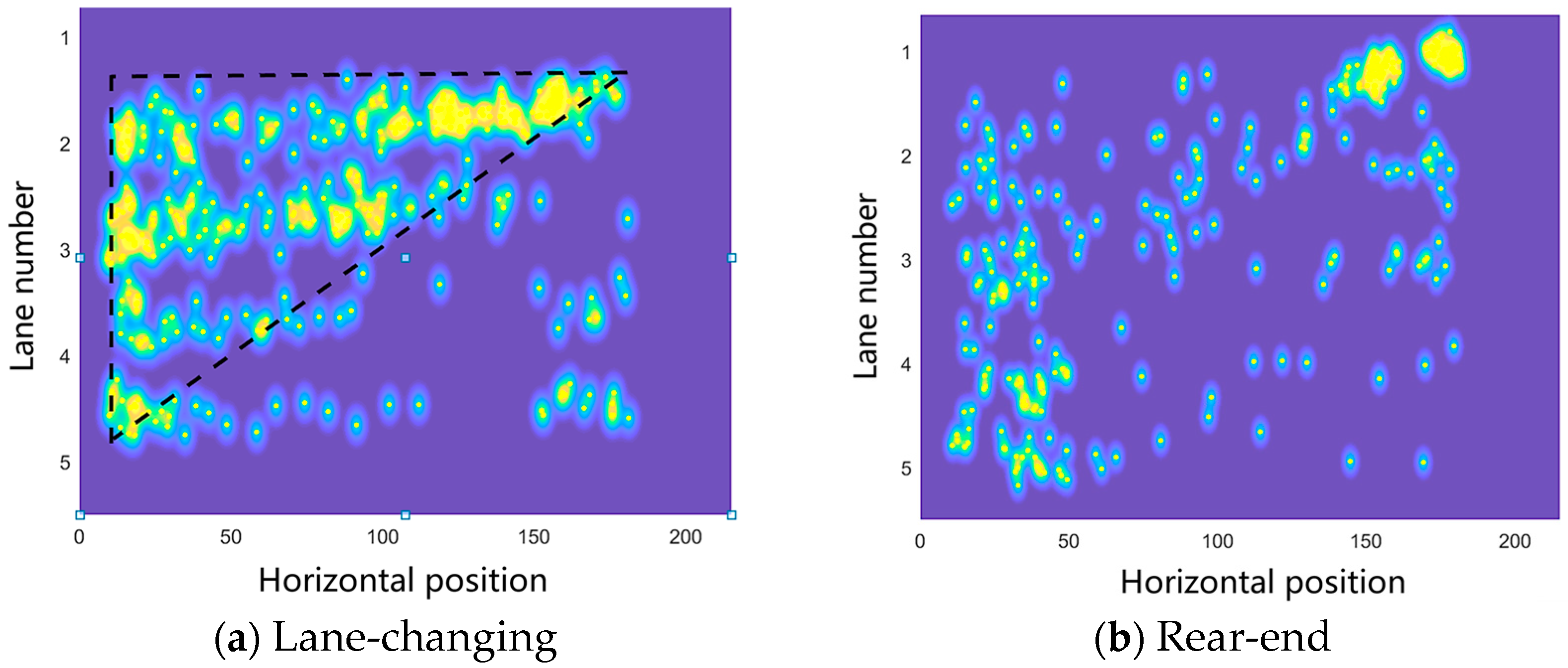
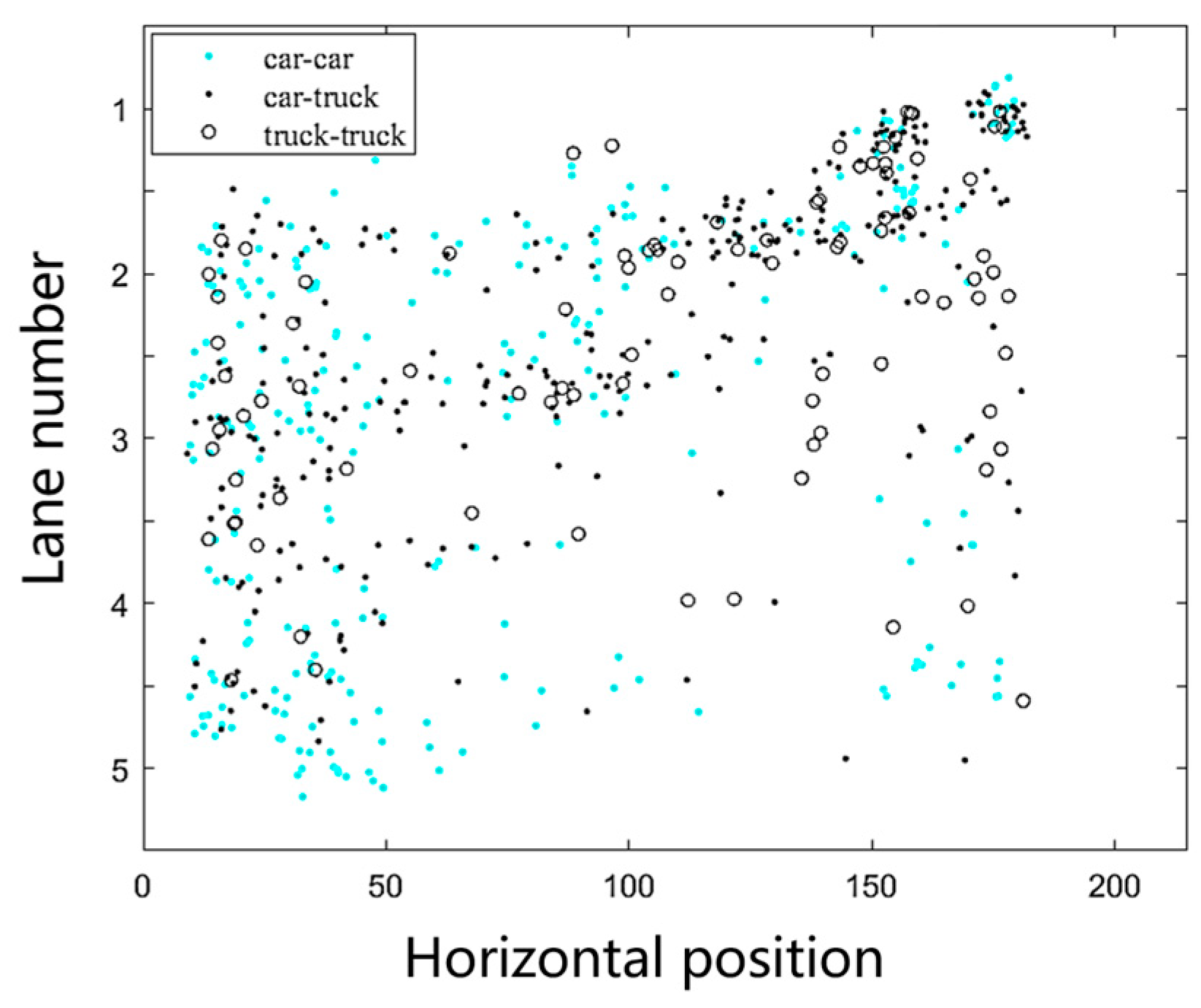
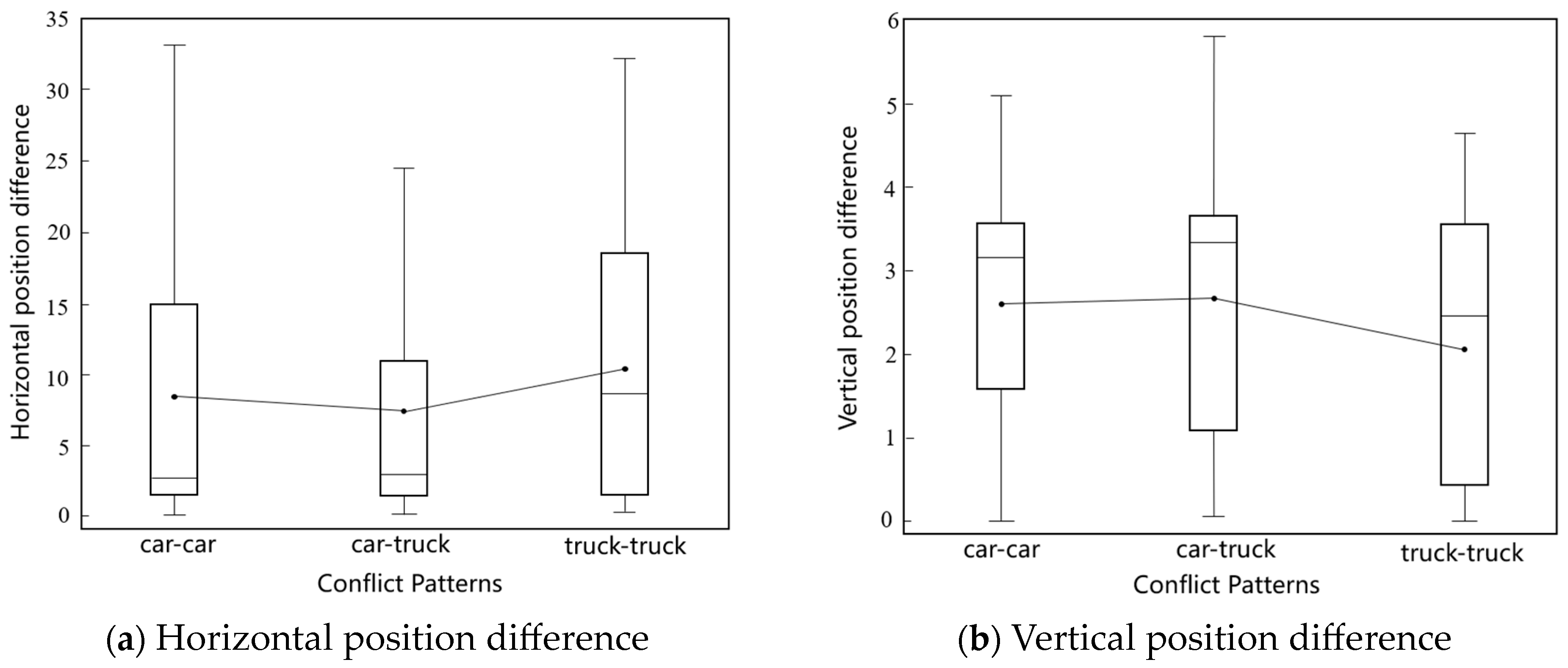
4.2. Conflict Analysis through PCRI Using the ORED
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zou, Y.; Han, W.; Zhang, Y.; Tang, J.; Zhong, X. Analyzing Freeway Traffic Incident Clearance Time Using a Deep Survival Model. J. Transp. Eng. Part A Syst. 2023, 149, 04023101. [Google Scholar] [CrossRef]
- Zheng, L.; Sayed, T.; Mannering, F. Modeling Traffic Conflicts for Use in Road Safety Analysis: A Review of Analytic Methods and Future Directions. Anal. Methods Accid. Res. 2021, 29, 100142. [Google Scholar] [CrossRef]
- Tselentis, D.I.; Papadimitriou, E. Driver Profile and Driving Pattern Recognition for Road Safety Assessment: Main Challenges and Future Directions. IEEE Open J. Intell. Transp. Syst. 2023, 4, 83–100. [Google Scholar] [CrossRef]
- Uchiyama, A.; Hiromori, A.; Akikawa, R.; Yamaguchi, H.; Higashino, T.; Suzuki, M.; Hiehata, Y.; Kitahara, T. Risky Traffic Situation Detection and Classification Using Smartphones. IEEE Open J. Intell. Transp. Syst. 2023, 4, 846–857. [Google Scholar] [CrossRef]
- Du, Z.; Deng, M.; Lyu, N.; Wang, Y. A Review of Road Safety Evaluation Methods Based on Driving Behavior. J. Traffic Transp. Eng. (Engl. Ed.) 2023, 10, 743–761. [Google Scholar] [CrossRef]
- Shen, X.; Zhang, Y.; Zhang, X.; Raksincharoensak, P.; Hashimoto, K. Robust Optimal Braking Policy for Avoiding Collision With Front Bicycle. IEEE Open J. Intell. Transp. Syst. 2023, 4, 943–954. [Google Scholar] [CrossRef]
- Mohammadian, S.; Haque, M.M.; Zheng, Z.; Bhaskar, A. Integrating Safety into the Fundamental Relations of Freeway Traffic Flows: A Conflict-Based Safety Assessment Framework. Anal. Methods Accid. Res. 2021, 32, 100187. [Google Scholar] [CrossRef]
- Lord, D.; Mannering, F. The Statistical Analysis of Crash-Frequency Data: A Review and Assessment of Methodological Alternatives. Transp. Res. Part A Policy Pract. 2010, 44, 291–305. [Google Scholar] [CrossRef]
- Ash, J.E.; Zou, Y.; Lord, D.; Wang, Y. Comparison of Confidence and Prediction Intervals for Different Mixed-Poisson Regression Models. J. Transp. Saf. Secur. 2021, 13, 357–379. [Google Scholar] [CrossRef]
- Svensson, Å.; Hydén, C. Estimating the Severity of Safety Related Behaviour. Accid. Anal. Prev. 2006, 38, 379–385. [Google Scholar] [CrossRef]
- Arun, A.; Haque, M.M.; Washington, S.; Sayed, T.; Mannering, F. A Systematic Review of Traffic Conflict-Based Safety Measures with a Focus on Application Context. Anal. Methods Accid. Res. 2021, 32, 100185. [Google Scholar] [CrossRef]
- Mahmud, S.M.S.; Ferreira, L.; Hoque, S.; Tavassoli, A. Reviewing Traffic Conflict Techniques for Potential Application to Developing Countries. J. Eng. Sci. Technol. 2018, 13, 1869–1890. [Google Scholar]
- Chin, H.-C.; Quek, S.-T. Measurement of Traffic Conflicts. Saf. Sci. 1997, 26, 169–185. [Google Scholar] [CrossRef]
- Tageldin, A.; Sayed, T. Developing Evasive Action-based Indicators for Identifying Pedestrian Conflicts in Less Organized Traffic Environments. J. Adv. Transp. 2016, 50, 1193–1208. [Google Scholar] [CrossRef]
- Wang, C.; Xu, C.; Dai, Y. A Crash Prediction Method Based on Bivariate Extreme Value Theory and Video-Based Vehicle Trajectory Data. Accid. Anal. Prev. 2019, 123, 365–373. [Google Scholar] [CrossRef] [PubMed]
- Laureshyn, A.; Svensson, Å.; Hydén, C. Evaluation of Traffic Safety, Based on Micro-Level Behavioural Data: Theoretical Framework and First Implementation. Accid. Anal. Prev. 2010, 42, 1637–1646. [Google Scholar] [CrossRef] [PubMed]
- Hayward, J.C. Near Miss Determination through Use of a Scale of Danger. Highway Res. Rec. 1972, 384, 24. [Google Scholar]
- Li, S.; Xiang, Q.; Ma, Y.; Gu, X.; Li, H. Crash Risk Prediction Modeling Based on the Traffic Conflict Technique and a Microscopic Simulation for Freeway Interchange Merging Areas. Int. J. Environ. Res. Public Health 2016, 13, 1157. [Google Scholar] [CrossRef]
- Zhang, S.; Abdel-Aty, M. Real-Time Pedestrian Conflict Prediction Model at the Signal Cycle Level Using Machine Learning Models. IEEE Open J. Intell. Transp. Syst. 2022, 3, 176–186. [Google Scholar] [CrossRef]
- Gu, X.; Cai, Q.; Lee, J.; Xiang, Q.; Ma, Y.; Xu, X. Proactive Crash Risk Prediction Modeling for Merging Assistance System at Interchange Merging Areas. Traffic Inj. Prev. 2020, 21, 234–240. [Google Scholar] [CrossRef]
- Ozbay, K.; Yang, H.; Bartin, B.; Mudigonda, S. Derivation and Validation of New Simulation-Based Surrogate Safety Measure. Transp. Res. Rec. 2008, 2083, 105–113. [Google Scholar] [CrossRef]
- Ge, H.; Xia, R.; Sun, H.; Yang, Y.; Huang, M. Construction and Simulation of Rear-End Conflicts Recognition Model Based on Improved TTC Algorithm. IEEE Access 2019, 7, 134763–134771. [Google Scholar] [CrossRef]
- Minderhoud, M.M.; Bovy, P.H.L. Extended Time-to-Collision Measures for Road Traffic Safety Assessment. Accid. Anal. Prev. 2001, 33, 89–97. [Google Scholar] [CrossRef]
- Van Winsum, W.; Brookhuis, K.A.; De Waard, D. A Comparison of Different Ways to Approximate Time-to-Line Crossing (TLC) during Car Driving. Accid. Anal. Prev. 2000, 32, 47–56. [Google Scholar] [CrossRef]
- Hydén, C. Traffic conflict techniques: Some data to supplement accident analysis. In Transport Planning & Traffic Safety: Making Cities, Roads & Vehicles Safer; CRC Press: Boca Raton, FL, USA, 2016; pp. 89–108. [Google Scholar]
- Dijkstra, A.; Drolenga, H. Safety effects of route choice in a road network: Simulation of changing route choice. Research in the Framework of the European Research Programme in-Safety, R-2008-10, Institute for Road Safety Research (SWOV): Leidschendam, Netherlands, 2008.
- Park, H.; Oh, C.; Moon, J.; Kim, S. Development of a Lane Change Risk Index Using Vehicle Trajectory Data. Accid. Anal. Prev. 2018, 110, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Tageldin, A.; Sayed, T.; Shaaban, K. Comparison of time-proximity and evasive action conflict measures: Case studies from five cities. Transp. Res. Rec. 2017, 2661, 19–29. [Google Scholar] [CrossRef]
- Yang, H.; Zou, Y.; Wang, Z.; Wu, B. A Hybrid Method for Short-Term Freeway Travel Time Prediction Based on Wavelet Neural Network and Markov Chain. Can. J. Civ. Eng. 2018, 45, 77–86. [Google Scholar] [CrossRef]
- Yang, X.; Zou, Y.; Chen, L. Operation Analysis of Freeway Mixed Traffic Flow Based on Catch-up Coordination Platoon. Accid. Anal. Prev. 2022, 175, 106780. [Google Scholar] [CrossRef] [PubMed]
- Wu, S.; Zou, Y.; Wu, L.; Zhang, Y. Application of Bayesian Model Averaging for Modeling Time Headway Distribution. Phys. A: Stat. Mech. Its Appl. 2023, 620, 128747. [Google Scholar] [CrossRef]
- Weng, J.; Xue, S.; Yang, Y.; Yan, X.; Qu, X. In-Depth Analysis of Drivers’ Merging Behavior and Rear-End Crash Risks in Work Zone Merging Areas. Accid. Anal. Prev. 2015, 77, 51–61. [Google Scholar] [CrossRef] [PubMed]
- An, G.; Bae, J.H.; Talebpour, A. An Optimized Car-Following Behavior in Response to a Lane-Changing Vehicle: A Bézier Curve-Based Approach. IEEE Open J. Intell. Transp. Syst. 2023, 4, 682–689. [Google Scholar] [CrossRef]
- Wang, W.; Yao, X.; Yan, Y.; Wu, B.; Wang, Z.; Zhang, H. Development and Performance of a Connected Car-Following Model. J. Transp. Eng. Part A Syst. 2023, 149, 04023079. [Google Scholar] [CrossRef]
- Zheng, L.; Huang, Y.; Sayed, T.; Wen, C. Validating the Bayesian Hierarchical Extreme Value Model for Traffic Conflict-Based Crash Estimation on Freeway Segments with Site-Level Factors. Accid. Anal. Prev. 2021, 159, 106269. [Google Scholar] [CrossRef]
- Xu, Z.; Zou, X.; Oh, T.; Vu, H.L. Studying Freeway Merging Conflicts Using Virtual Reality Technology. J. Saf. Res. 2021, 76, 16–29. [Google Scholar] [CrossRef]
- Wu, B.; Zou, C.; Li, Y.; Fan, D.; Zhu, S. Impact of Road Environment on Drivers’ Preference to Merging Location Selection in Freeway Work Zone Merging Areas. J. Adv. Transp. 2022, 2022, 2996081. [Google Scholar] [CrossRef]
- Zhu, J.; Tasic, I. Safety Analysis of Freeway On-Ramp Merging with the Presence of Autonomous Vehicles. Accid. Anal. Prev. 2021, 152, 105966. [Google Scholar] [CrossRef]
- Wang, P.; Zhu, S.; Zhao, X. Identification and Factor Analysis of Traffic Conflicts in the Merge Area of Freeway Work Zone. Sustainability 2023, 15, 11314. [Google Scholar] [CrossRef]
- Meng, Q.; Weng, J. Evaluation of Rear-End Crash Risk at Work Zone Using Work Zone Traffic Data. Accid. Anal. Prev. 2011, 43, 1291–1300. [Google Scholar] [CrossRef]
- Chen, Y.; Zou, Y.; Kong, X.; Wu, L. Investigating the Impact of Influential Factors on Crash Types for Autonomous Vehicles at Intersections. J. Transp. Saf. Secur. 2023, 1–28. [Google Scholar] [CrossRef]
- Ward, J.R.; Agamennoni, G.; Worrall, S.; Bender, A.; Nebot, E. Extending Time to Collision for Probabilistic Reasoning in General Traffic Scenarios. Transp. Res. Part C Emerg. Technol. 2015, 51, 66–82. [Google Scholar] [CrossRef]
- Venthuruthiyil, S.P. Anticipated Collision Time (ACT): A Two-Dimensional Surrogate Safety Indicator for Trajectory-Based Proactive Safety Assessment. Transp. Res. Part C Emerg. Technol. 2022, 139, 103655. [Google Scholar] [CrossRef]
- Mahajan, V.; Katrakazas, C.; Antoniou, C. Crash Risk Estimation Due to Lane Changing: A Data-Driven Approach Using Naturalistic Data. IEEE Trans. Intell. Transport. Syst. 2022, 23, 3756–3765. [Google Scholar] [CrossRef]
- Bock, J.; Krajewski, R.; Moers, T.; Runde, S.; Vater, L.; Eckstein, L. The inD Dataset: A Drone Dataset of Naturalistic Road User Trajectories at German Intersections. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 19 October 2020; pp. 1929–1934. [Google Scholar]
- Lu, Y.; Cheng, K.; Zhang, Y.; Chen, X.; Zou, Y. Analysis of Lane-Changing Conflict between Cars and Trucks at Freeway Merging Sections Using UAV Video Data. J. Transp. Saf. Secur. 2023, 15, 943–961. [Google Scholar] [CrossRef]
- Chen, X.; Li, Z.; Yang, Y.; Qi, L.; Ke, R. High-Resolution Vehicle Trajectory Extraction and Denoising from Aerial Videos. IEEE Trans. Intell. Transport. Syst. 2021, 22, 3190–3202. [Google Scholar] [CrossRef]
- Bagdadi, O.; Várhelyi, A. Development of a Method for Detecting Jerks in Safety Critical Events. Accid. Anal. Prev. 2013, 50, 83–91. [Google Scholar] [CrossRef] [PubMed]
- Zheng, L.; Sayed, T. Comparison of Traffic Conflict Indicators for Crash Estimation Using Peak over Threshold Approach. Transp. Res. Rec. 2019, 2673, 493–502. [Google Scholar] [CrossRef]
- El-Shawarby, I.; Amer, A.; Rakha, H. Driver Stopping Behavior on High-Speed Signalized Intersection Approaches. Transp. Res. Rec. 2008, 2056, 60–69. [Google Scholar] [CrossRef]
- Gettman, D.; Pu, L.; Sayed, T.; Shelby, S.G.; Energy, S. Surrogate Safety Assessment Model and Validation (No. FHWA-HRT-08-051); Turner-Fairbank Highway Research Center: McLean, VA, USA, 2008. [Google Scholar]
- Zhang, Y.; Zou, Y.; Xie, Y.; Chen, L. Identifying Dynamic Interaction Patterns in Mandatory and Discretionary Lane Changes Using Graph Structure. Comput. Aided Civ. Eng. 2023, 39, 638–655. [Google Scholar] [CrossRef]
- Zhang, Y.; Zou, Y.; Selpi; Zhang, Y.; Wu, L. Spatiotemporal Interaction Pattern Recognition and Risk Evolution Analysis During Lane Changes. IEEE Trans. Intell. Transp. Syst. 2023, 24, 6663–6673. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rear-End | Lane-Changing | Crossing | All | |
|---|---|---|---|---|
| TTC | 2.7 | 0.3 | 1.6 | 4.6 |
| PCRI | 0 | 0.4 | 1.2 | 1.6 |
| Frame | Deceleration (m/s2) | Frame | Deceleration (m/s2) | Frame | Deceleration (m/s2) | Frame | Deceleration (m/s2) |
|---|---|---|---|---|---|---|---|
| 5931 | 0.86662 | 5951 | 0.74541 | 5971 | 1.68923 | 5991 | 2.25693 |
| 5932 | 0.83401 | 5952 | 0.77169 | 5972 | 1.74172 | 5992 | 2.25815 |
| 5933 | 0.80279 | 5953 | 0.80031 | 5973 | 1.79232 | 5993 | 2.25719 |
| 5934 | 0.77334 | 5954 | 0.83142 | 5974 | 1.84092 | 5994 | 2.25401 |
| 5935 | 0.74593 | 5955 | 0.86511 | 5975 | 1.88741 | 5995 | 2.24854 |
| 5936 | 0.72082 | 5956 | 0.90151 | 5976 | 1.93171 | 5996 | 2.24070 |
| 5937 | 0.69833 | 5957 | 0.94069 | 5977 | 1.97360 | 5997 | 2.23040 |
| 5938 | 0.67865 | 5958 | 0.98265 | 5978 | 2.01285 | 5998 | 2.21751 |
| 5939 | 0.66194 | 5959 | 1.02751 | 5979 | 2.04918 | 5999 | 2.20188 |
| 5940 | 0.64836 | 5960 | 1.07532 | 5980 | 2.08243 | 6000 | 2.18351 |
| 5941 | 0.63827 | 5961 | 1.12590 | 5981 | 2.11258 | 6001 | 2.16228 |
| 5942 | 0.63213 | 5962 | 1.17891 | 5982 | 2.13964 | 6002 | 2.13801 |
| 5943 | 0.63034 | 5963 | 1.23393 | 5983 | 2.16362 | 6003 | 2.11057 |
| 5944 | 0.63285 | 5964 | 1.29045 | 5984 | 2.18452 | 6004 | 2.07990 |
| 5945 | 0.63939 | 5965 | 1.34780 | 5985 | 2.20237 | 6005 | 2.04589 |
| 5946 | 0.64974 | 5966 | 1.40552 | 5986 | 2.21735 | 6006 | 2.00838 |
| 5947 | 0.66367 | 5967 | 1.46341 | 5987 | 2.22981 | 6007 | 1.96731 |
| 5948 | 0.68055 | 5968 | 1.52124 | 5988 | 2.24001 | 6008 | 1.92275 |
| 5949 | 0.69983 | 5969 | 1.57862 | 5989 | 2.24793 | 6009 | 1.87484 |
| 5950 | 0.72144 | 5970 | 1.63482 | 5990 | 2.25355 | 6010 | 1.82390 |
| Frame | Deceleration (m/s2) | Frame | Deceleration (m/s2) |
|---|---|---|---|
| 29996 | 1.4200 | 30066 | −0.3856 |
| 29997 | 1.4204 | 30067 | −0.4021 |
| 29998 | 1.4193 | 30068 | −0.4159 |
| 29999 | 1.4164 | 30069 | −0.4271 |
| 30000 | 1.4113 | 30070 | −0.4357 |
| 30001 | 1.4039 | 30071 | −0.4421 |
| 30002 | 1.3943 | 30072 | −0.4462 |
| 30003 | 1.3828 | 30073 | −0.4485 |
| 30004 | 1.3696 | 30074 | −0.4495 |
| 30005 | 1.3548 | 30075 | −0.4494 |
| 30006 | 1.3386 | 30076 | −0.4484 |
| 30007 | 1.3214 | 30077 | −0.4464 |
| 30008 | 1.3034 | 30078 | −0.4432 |
| 30009 | 1.2853 | 30079 | −0.4386 |
| 30010 | 1.2676 | 30080 | −0.4326 |
| 30011 | 1.2516 | 30081 | −0.4253 |
| 30012 | 1.2383 | 30082 | −0.4168 |
| 30013 | 1.2284 | 30083 | −0.4073 |
| 30014 | 1.2213 | 30084 | −0.3970 |
| 30015 | 1.2160 | 30085 | −0.3859 |
| Lane 1 | Lane 2 | Lane 3 | Lane 4 | Lane 5 | All | |
|---|---|---|---|---|---|---|
| Average | 29% | 68% | 69% | 35% | 2.0% | 34% |
| Min | 18% | 38% | 46% | 11% | 0.0% | 26% |
| Max | 58% | 86% | 95% | 72% | 10% | 47% |
| Conflict Patterns | Quantity | Average PCRI | Horizontal Position (m) | Vertical Position (m) | Horizontal Distance (m) | Vertical Distance (m) | Lane-Changing Conflict Ratio |
|---|---|---|---|---|---|---|---|
| Car–car | 265 | 0.08 | 77.47 | 72.41 | 8.47 | 2.59 | 55.8% |
| Car–truck | 290 | 0.08 | 97.16 | 74.48 | 7.24 | 2.66 | 61.7% |
| Truck–truck | 91 | 0.09 | 106.84 | 74.53 | 10.41 | 2.06 | 45.0% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, S.; Lu, Y.; Liao, Y.; Cheng, K.; Zou, Y. A New Surrogate Safety Measure Considering Temporal–Spatial Proximity and Severity of Potential Collisions. Appl. Sci. 2024, 14, 2711. https://doi.org/10.3390/app14072711
Tang S, Lu Y, Liao Y, Cheng K, Zou Y. A New Surrogate Safety Measure Considering Temporal–Spatial Proximity and Severity of Potential Collisions. Applied Sciences. 2024; 14(7):2711. https://doi.org/10.3390/app14072711
Chicago/Turabian StyleTang, Shuning, Yichen Lu, Yankun Liao, Kai Cheng, and Yajie Zou. 2024. "A New Surrogate Safety Measure Considering Temporal–Spatial Proximity and Severity of Potential Collisions" Applied Sciences 14, no. 7: 2711. https://doi.org/10.3390/app14072711
APA StyleTang, S., Lu, Y., Liao, Y., Cheng, K., & Zou, Y. (2024). A New Surrogate Safety Measure Considering Temporal–Spatial Proximity and Severity of Potential Collisions. Applied Sciences, 14(7), 2711. https://doi.org/10.3390/app14072711