
Windowed Hamming Distance-Based Intrusion Detection for the CAN Bus

Abstract
1. Introduction
- We design a method based on windowed Hamming distance, which is lightweight and effective. The data transmitted over the CAN bus exhibit periodicity and a consistent time interval. To establish a baseline, we create benchmark windows that encompass at least one cycle of data. We then compare each newly generated window to all the recorded benchmark windows using the Hamming distance. By comparing the calculated distances with a predefined threshold, we can determine whether the vehicle is in a potentially dangerous state. Due to the design of the sliding windows, our method exhibits enhanced robustness. Moreover, our approach has the capability to identify the detected attack types to a certain extent.
- We test our method on two datasets, one is a public dataset from car-hacking [14] and the other is our own dataset collected by CAN bus tool USB CAN-2E-U in an autonomous Xiaoyu 2.0 bus produced by Yutong company. We conduct extensive tests on these two datasets, demonstrating the applicability and effectiveness of our IDS. During the experimental phase, we identify the optimal combination of hyperparameters that yields favorable detection performance. Experimental results affirm that our method has strong detection capabilities for DoS attacks, fuzzy attacks, and two types of spoofing attacks, reaching an average accuracy of 99.36% and FS of 99.1%, respectively. We measure the detection time for only 0.37 ms.
Organization
2. Related Work
3. Background and Attack Model
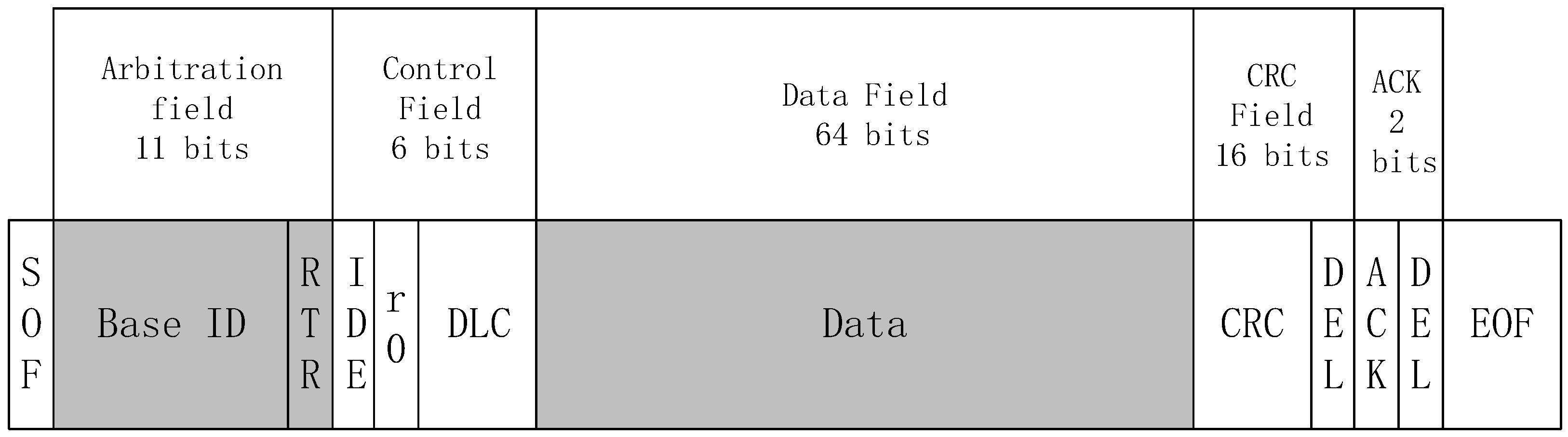
3.1. Background of the CAN Bus
- Start of Frame (SOF): 1 bit, indicating the start of a new data transmission.
- Arbitration field (ARBITRATION FIELD): 11 or 29 bits, in the CAN 2.0A standard [48]; this field is composed of 11 bits and serves to indicate the purpose of the data frame while also facilitating the CAN network’s arbitration mechanism.
- Control segment (CONTROL FIELD): 6 bits, including remote transmission request (RTR), extended format flag (IDE), reserved bit (r0), data length code (DLC), and other information.
- Data field (DATA FIELD): 64 bits, containing the actual data to be transmitted.
- CRC segment (CRC FIELD): 16 bits, including cyclic redundancy check code and CRC delimiter.
- Acknowledgment segment (ACKNOWLEDGEMENT FIELD): 2 bits, including the acknowledgment slot and the acknowledgment delimiter.
- End of frame (EOF): 7 bits, indicating the end of a data transmission.
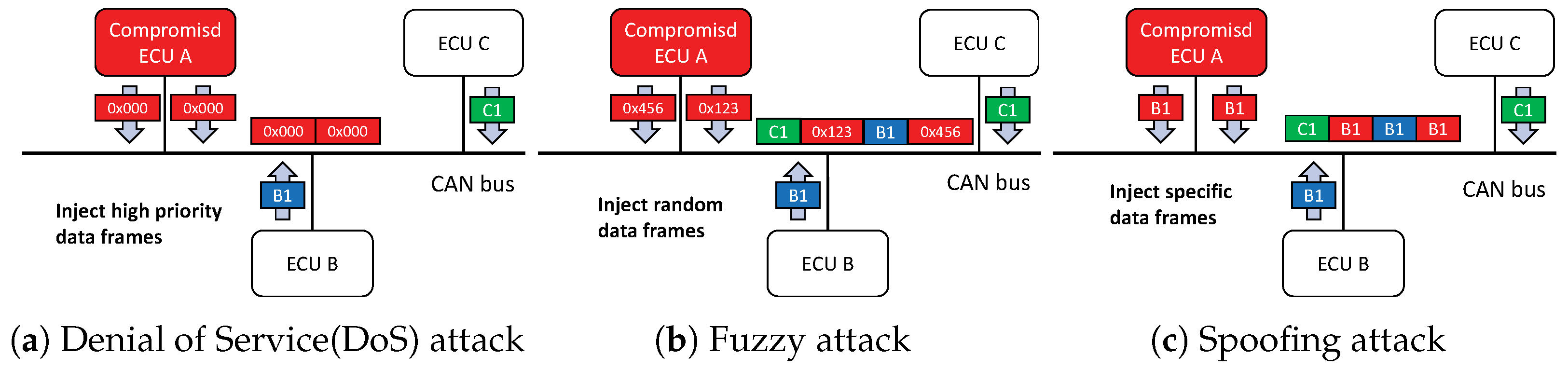
3.2. Threat Model
3.2.1. DoS Attack
3.2.2. Fuzzy Attack
3.2.3. Spoofing Attack
4. Proposed Methods
4.1. Work Objectives and Hypothesis
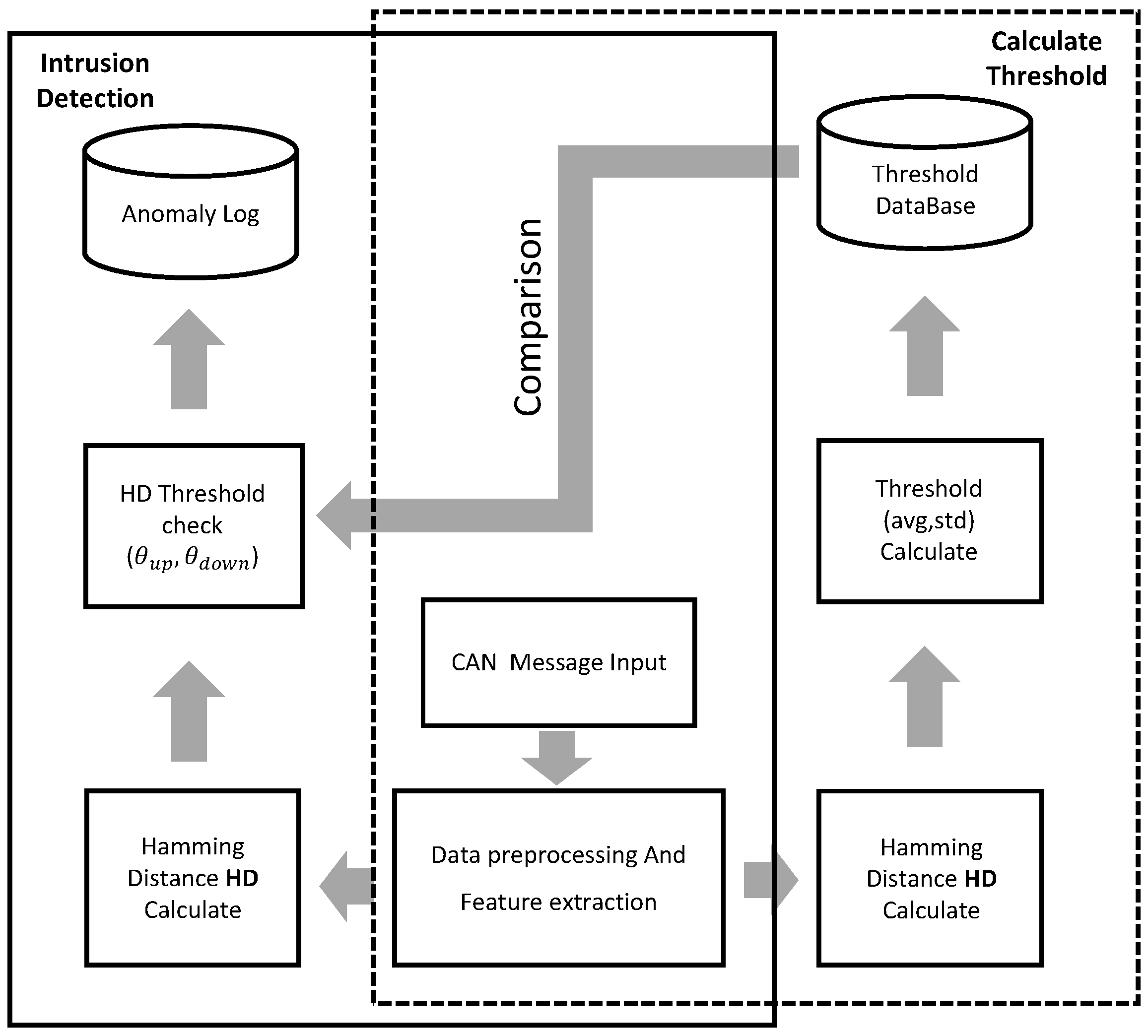
4.2. Overview of Our Proposed Methods
4.3. Calculation of Threshold
4.3.1. Hamming Distance
4.3.2. Preprocessing of Data
4.3.3. Calculation of Threshold
| Algorithm 1 Calculate Threshold |
|
4.4. Intrusion Detection System
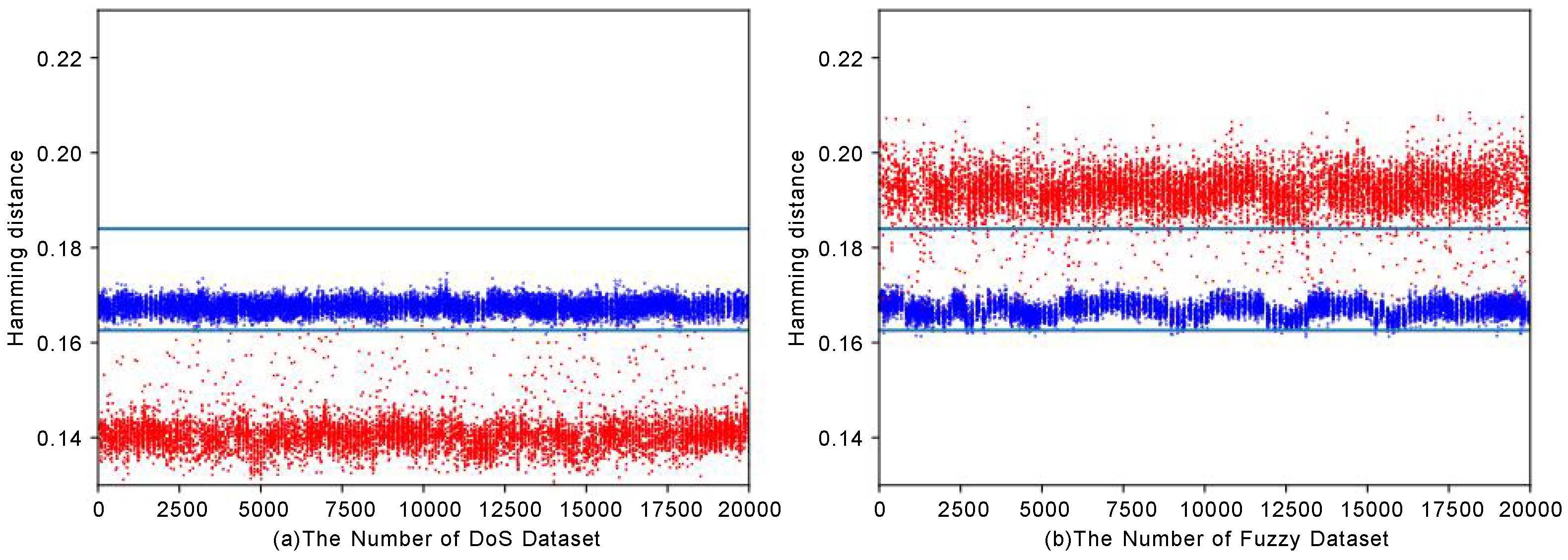
4.4.1. Detect of DoS and Fuzzy Attack
4.4.2. Detection of Spoofing Attack
4.4.3. Detection Process
| Algorithm 2 Intrusion Detection System |
|
5. Performance Evaluation
5.1. Experimental Environment and Dataset
5.2. Evaluation Criteria
5.3. Experimental Results
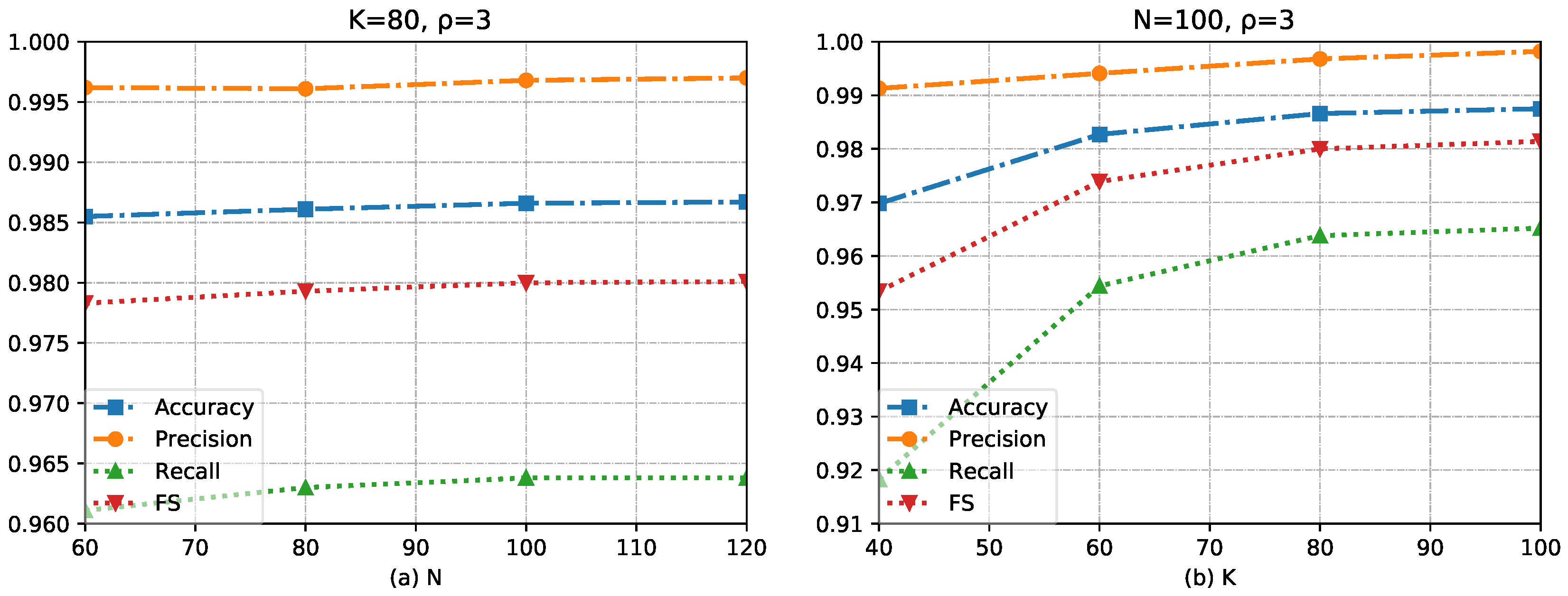
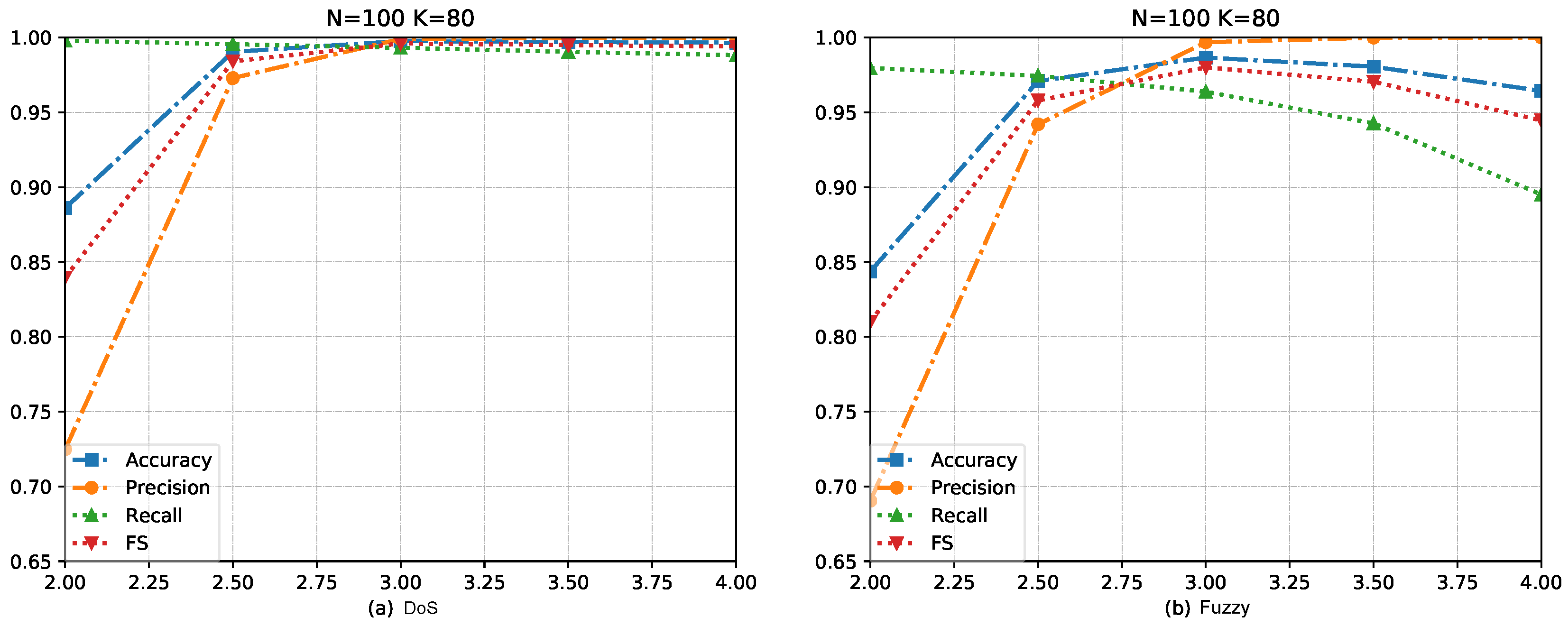
5.3.1. Effect of Hyperparameters
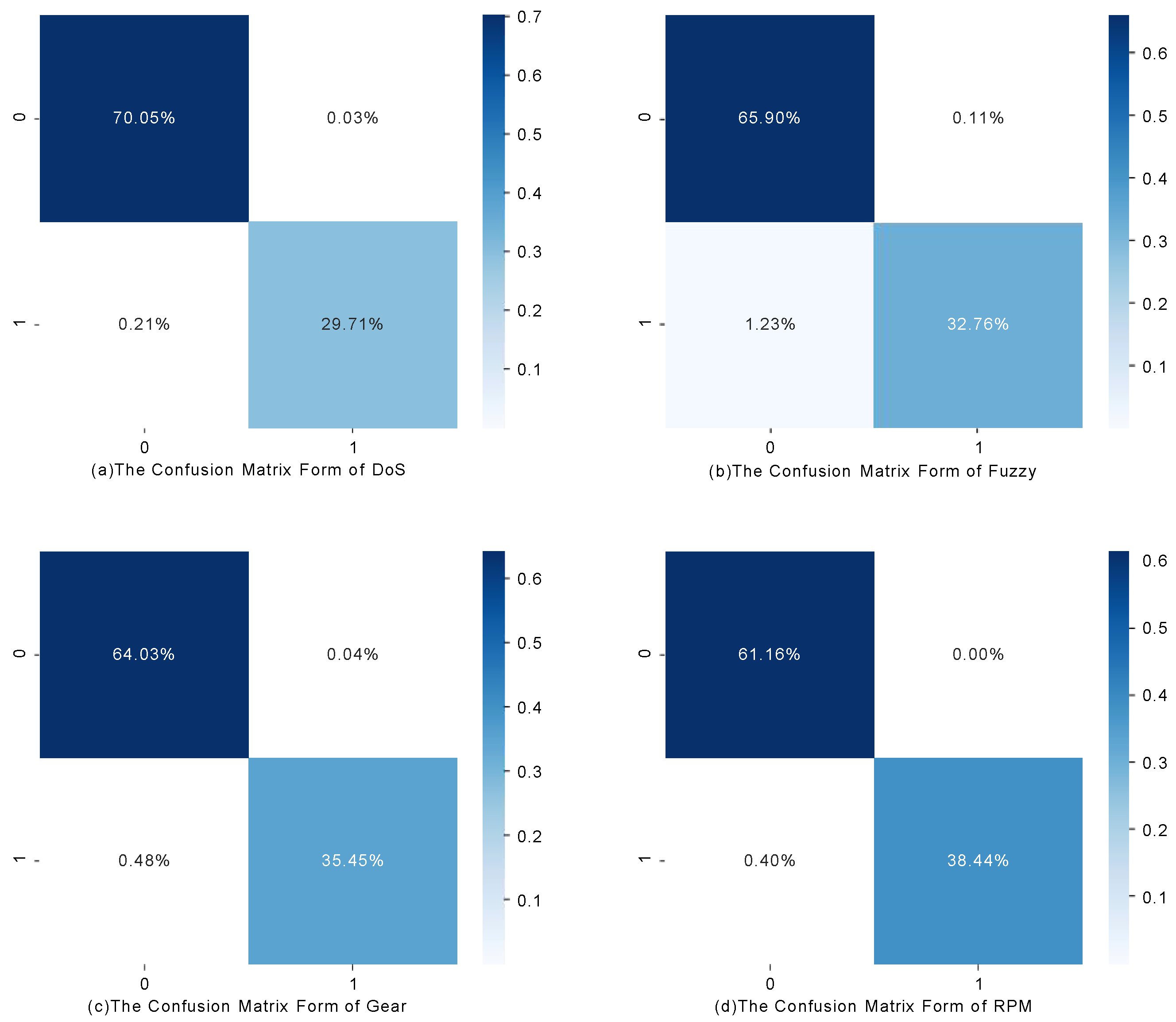
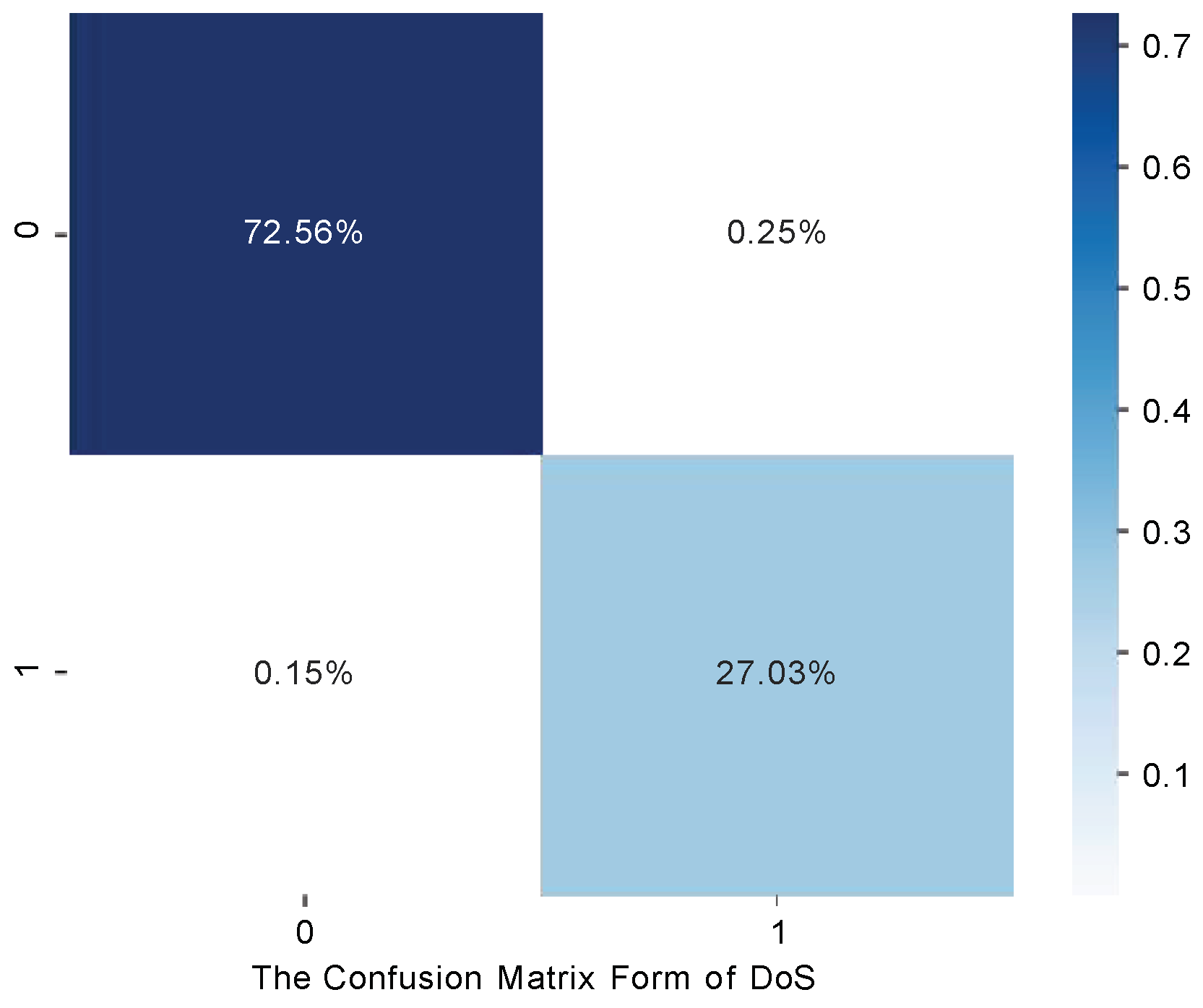
5.3.2. Result in Two Datasets
5.4. Comparison with Other Work
5.5. Time for the Detection System
6. Discussion
6.1. Identify Attack Types
6.2. Other Attacks
6.3. Limitations and Future Work
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Santhi, M.; Deepthi, K.; NVL, C.S.K.; Prasanna, P.L. Security Issues on Inter-Vehicle Communications. Int. J. Comput. Sci. Inf. Technol. 2011, 2, 2579–2583. [Google Scholar]
- Contreras-Castillo, J.; Zeadally, S.; Guerrero-Ibañez, J.A. Internet of vehicles: Architecture, protocols, and security. IEEE Internet Things J. 2017, 5, 3701–3709. [Google Scholar] [CrossRef]
- Zeng, W.; Khalid, M.A.; Chowdhury, S. In-vehicle networks outlook: Achievements and challenges. IEEE Commun. Surv. Tutor. 2016, 18, 1552–1571. [Google Scholar] [CrossRef]
- Checkoway, S.; McCoy, D.; Kantor, B.; Anderson, D.; Shacham, H.; Savage, S.; Koscher, K.; Czeskis, A.; Roesner, F.; Kohno, T. Comprehensive experimental analyses of automotive attack surfaces. In Proceedings of the 20th USENIX Conference on Security, SEC’11, San Francisco, CA, USA, 8–12 August 2011; p. 6. [Google Scholar]
- Foster, I.; Prudhomme, A.; Koscher, K.; Savage, S. Fast and vulnerable: A story of telematic failures. In Proceedings of the 9th USENIX Workshop on Offensive Technologies (WOOT 15), Washington, DC, USA, 10–11 August 2015. [Google Scholar]
- Miller, C.; Valasek, C. Remote exploitation of an unaltered passenger vehicle. Black Hat USA 2015, 2015, 1–91. [Google Scholar]
- Lokman, S.F.; Othman, A.T.; Abu-Bakar, M.H. Intrusion detection system for automotive Controller Area Network (CAN) bus system: A review. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 184. [Google Scholar] [CrossRef]
- Aliwa, E.; Rana, O.; Perera, C.; Burnap, P. Cyberattacks and countermeasures for in-vehicle networks. Acm Comput. Surv. (CSUR) 2021, 54, 1–37. [Google Scholar] [CrossRef]
- Song, H.M.; Woo, J.; Kim, H.K. In-vehicle network intrusion detection using deep convolutional neural network. Veh. Commun. 2020, 21, 100198. [Google Scholar] [CrossRef]
- Cho, K.T.; Shin, K.G. Fingerprinting electronic control units for vehicle intrusion detection. In Proceedings of the USENIX Security Symposium, Austin, TX, USA, 10–12 August 2016; Volume 40, pp. 911–927. [Google Scholar]
- Serag, K.; Bhatia, R.; Faqih, A.; Ozmen, M.O.; Kumar, V.; Celik, Z.B.; Xu, D. ZBCAN: A zero-byte CAN defense system. In Proceedings of the 32nd USENIX Conference on Security Symposium, SEC’23, Anaheim, CA, USA, 9–11 August 2023. [Google Scholar]
- Stabili, D.; Marchetti, M.; Colajanni, M. Detecting attacks to internal vehicle networks through Hamming distance. In Proceedings of the 2017 AEIT International Annual Conference, IEEE, Cagliari, Italy, 20–22 September 2017; pp. 1–6. [Google Scholar]
- Derhab, A.; Belaoued, M.; Mohiuddin, I.; Kurniawan, F.; Khan, M.K. Histogram-based intrusion detection and filtering framework for secure and safe in-vehicle networks. IEEE Trans. Intell. Transp. Syst. 2021, 23, 2366–2379. [Google Scholar] [CrossRef]
- Seo, E.; Song, H.M.; Kim, H.K. GIDS: GAN based intrusion detection system for in-vehicle network. In Proceedings of the 2018 16th Annual Conference on Privacy, Security and Trust (PST), IEEE, Belfast, Ireland, 28–30 August 2018; pp. 1–6. [Google Scholar]
- Koscher, K.; Czeskis, A.; Roesner, F.; Patel, S.; Kohno, T.; Checkoway, S.; McCoy, D.; Kantor, B.; Anderson, D.; Shacham, H.; et al. Experimental security analysis of a modern automobile. In Proceedings of the 2010 IEEE symposium on security and privacy, IEEE, Oakland, CA, USA, 16–19 May 2010; pp. 447–462. [Google Scholar]
- Hoppe, T.; Kiltz, S.; Dittmann, J. Security threats to automotive CAN networks—Practical examples and selected short-term countermeasures. Reliab. Eng. Syst. Saf. 2011, 96, 11–25. [Google Scholar] [CrossRef]
- Lin, C.W.; Sangiovanni-Vincentelli, A. Cyber-security for the controller area network (CAN) communication protocol. In Proceedings of the 2012 International Conference on Cyber Security, IEEE, Alexandria, VA, USA, 14–16 December 2012; pp. 1–7. [Google Scholar]
- Nilsson, D.K.; Larson, U.E.; Jonsson, E. Efficient in-vehicle delayed data authentication based on compound message authentication codes. In Proceedings of the 2008 IEEE 68th Vehicular Technology Conference, IEEE, Calgary, AB, Canada, 21–24 September 2008; pp. 1–5. [Google Scholar]
- Van Herrewege, A.; Singelee, D.; Verbauwhede, I. CANAuth-a simple, backward compatible broadcast authentication protocol for CAN bus. In Proceedings of the ECRYPT Workshop on Lightweight Cryptography, ECRYPT, Louvain-la-Neuve, Belgium, 28 November 2011; Volume 2011, p. 20. [Google Scholar]
- Jo, H.J.; Kim, J.H.; Choi, H.Y.; Choi, W.; Lee, D.H.; Lee, I. Mauth-can: Masquerade-attack-proof authentication for in-vehicle networks. IEEE Trans. Veh. Technol. 2019, 69, 2204–2218. [Google Scholar] [CrossRef]
- Longari, S.; Valcarcel, D.H.N.; Zago, M.; Carminati, M.; Zanero, S. CANnolo: An anomaly detection system based on LSTM autoencoders for controller area network. IEEE Trans. Netw. Serv. Manag. 2020, 18, 1913–1924. [Google Scholar] [CrossRef]
- Taylor, A. Anomaly-Based Detection of Malicious Activity in in-Vehicle Networks. Ph.D. Thesis, Université d’Ottawa/University of Ottawa, Ottawa, ON, Canada, 2017. [Google Scholar]
- Xiao, L.; Lu, X.; Xu, T.; Zhuang, W.; Dai, H. Reinforcement learning-based physical-layer authentication for controller area networks. IEEE Trans. Inf. Forensics Secur. 2021, 16, 2535–2547. [Google Scholar] [CrossRef]
- Zhou, A.; Li, Z.; Shen, Y. Anomaly detection of CAN bus messages using a deep neural network for autonomous vehicles. Appl. Sci. 2019, 9, 3174. [Google Scholar] [CrossRef]
- Kang, M.J.; Kang, J.W. Intrusion detection system using deep neural network for in-vehicle network security. PLoS ONE 2016, 11, e0155781. [Google Scholar] [CrossRef] [PubMed]
- Song, H.M.; Kim, H.R.; Kim, H.K. Intrusion detection system based on the analysis of time intervals of CAN messages for in-vehicle network. In Proceedings of the 2016 International Conference on Information Networking (ICOIN), IEEE, Kota Kinabalu, Malaysia, 13–15 January 2016; pp. 63–68. [Google Scholar]
- Hoang, T.N.; Kim, D. Supervised contrastive ResNet and transfer learning for the in-vehicle intrusion detection system. Expert Syst. Appl. 2024, 238, 122181. [Google Scholar] [CrossRef]
- Nguyen, T.P.; Nam, H.; Kim, D. Transformer-based attention network for in-vehicle intrusion detection. IEEE Access 2023, 11, 55389–55403. [Google Scholar] [CrossRef]
- Zhang, H.; Zeng, K.; Lin, S. Federated graph neural network for fast anomaly detection in controller area networks. IEEE Trans. Inf. Forensics Secur. 2023, 18, 1566–1579. [Google Scholar] [CrossRef]
- Hamming, R.W. Error detecting and error correcting codes. Bell Syst. Tech. J. 1950, 29, 147–160. [Google Scholar] [CrossRef]
- Tian, D.; Li, Y.; Wang, Y.; Duan, X.; Wang, C.; Wang, W.; Hui, R.; Guo, P. An intrusion detection system based on machine learning for CAN-bus. In Proceedings of the Industrial Networks and Intelligent Systems: 3rd International Conference, INISCOM 2017, Ho Chi Minh City, Vietnam, 4 September 2017; Proceedings 3. Springer: Cham, Switzerland, 2018; pp. 285–294. [Google Scholar]
- Li, X.; Zhang, H.; Miao, Y.; Ma, S.; Ma, J.; Liu, X.; Choo, K.K.R. Can bus messages abnormal detection using improved svdd in internet of vehicles. IEEE Internet Things J. 2021, 9, 3359–3371. [Google Scholar] [CrossRef]
- Yang, L.; Moubayed, A.; Shami, A. MTH-IDS: A multitiered hybrid intrusion detection system for internet of vehicles. IEEE Internet Things J. 2021, 9, 616–632. [Google Scholar] [CrossRef]
- Alalwany, E.; Mahgoub, I. An Effective Ensemble Learning-Based Real-Time Intrusion Detection Scheme for an In-Vehicle Network. Electronics 2024, 13, 919. [Google Scholar] [CrossRef]
- Avatefipour, O.; Al-Sumaiti, A.S.; El-Sherbeeny, A.M.; Awwad, E.M.; Elmeligy, M.A.; Mohamed, M.A.; Malik, H. An intelligent secured framework for cyberattack detection in electric vehicles’ CAN bus using machine learning. IEEE Access 2019, 7, 127580–127592. [Google Scholar] [CrossRef]
- Islam, R.; Refat, R.U.D.; Yerram, S.M.; Malik, H. Graph-based intrusion detection system for controller area networks. IEEE Trans. Intell. Transp. Syst. 2020, 23, 1727–1736. [Google Scholar] [CrossRef]
- Kang, L.; Shen, H. Abnormal message detection for CAN bus based on message transmission behaviors. In Proceedings of the 2020 IEEE 40th International Conference on Distributed Computing Systems (ICDCS), IEEE, Singapore, 29 November–1 December 2020; pp. 432–441. [Google Scholar]
- Lee, H.; Jeong, S.H.; Kim, H.K. OTIDS: A novel intrusion detection system for in-vehicle network by using remote frame. In Proceedings of the 2017 15th Annual Conference on Privacy, Security and Trust (PST), IEEE, Calgary, AB, Canada, 28–30 August 2017; pp. 57–5709. [Google Scholar]
- Taylor, A.; Japkowicz, N.; Leblanc, S. Frequency-based anomaly detection for the automotive CAN bus. In Proceedings of the 2015 World Congress on Industrial Control Systems Security (WCICSS), IEEE, London, UK, 14–16 December 2015; pp. 45–49. [Google Scholar]
- Moore, M.R.; Bridges, R.A.; Combs, F.L.; Starr, M.S.; Prowell, S.J. Modeling inter-signal arrival times for accurate detection of can bus signal injection attacks: A data-driven approach to in-vehicle intrusion detection. In Proceedings of the 12th Annual Conference on Cyber and Information Security Research, Oak Ridge, TN, USA, 4–6 April 2017; pp. 1–4. [Google Scholar]
- Marchetti, M.; Stabili, D.; Guido, A.; Colajanni, M. Evaluation of anomaly detection for in-vehicle networks through information-theoretic algorithms. In Proceedings of the 2016 IEEE 2nd International Forum on Research and Technologies for Society and Industry Leveraging a Better Tomorrow (RTSI), IEEE, Bologna, Italy, 7–9 September 2016; pp. 1–6. [Google Scholar]
- Müter, M.; Asaj, N. Entropy-based anomaly detection for in-vehicle networks. In Proceedings of the 2011 IEEE Intelligent Vehicles Symposium (IV), IEEE, Baden-Baden, Germany, 5–9 June 2011; pp. 1110–1115. [Google Scholar]
- Groza, B.; Murvay, P.S. Efficient intrusion detection with bloom filtering in controller area networks. IEEE Trans. Inf. Forensics Secur. 2018, 14, 1037–1051. [Google Scholar] [CrossRef]
- Kneib, M.; Huth, C. Scission: Signal characteristic-based sender identification and intrusion detection in automotive networks. In Proceedings of the 2018 ACM SIGSAC Conference on Computer and Communications Security, Toronto, ON, Canada, 15–19 October 2018; pp. 787–800. [Google Scholar]
- Choi, W.; Joo, K.; Jo, H.J.; Park, M.C.; Lee, D.H. Voltageids: Low-level communication characteristics for automotive intrusion detection system. IEEE Trans. Inf. Forensics Secur. 2018, 13, 2114–2129. [Google Scholar] [CrossRef]
- Han, M.L.; Kwak, B.I.; Kim, H.K. Anomaly intrusion detection method for vehicular networks based on survival analysis. Veh. Commun. 2018, 14, 52–63. [Google Scholar] [CrossRef]
- Cho, K.T.; Shin, K.G. Error handling of in-vehicle networks makes them vulnerable. In Proceedings of the 2016 ACM SIGSAC Conference on Computer and Communications Security, Vienna, Austria, 24–28 October 2016; pp. 1044–1055. [Google Scholar]
- Specification CAN 2.0; Bosch. Robert Bosch GmbH: Gerlingen, Germany, 1991.
- Norouzi, M.; Fleet, D.J.; Salakhutdinov, R.R. Hamming distance metric learning. Adv. Neural Inf. Process. Syst. 2012, 2, 1061–1069. [Google Scholar]
- Park, J.W.; Tumanov, A.; Jiang, A.; Kozuch, M.A.; Ganger, G.R. 3sigma: Distribution-based cluster scheduling for runtime uncertainty. In Proceedings of the Thirteenth EuroSys Conference, Porto, Portugal, 23–26 April 2018; pp. 1–17. [Google Scholar]
- Ding, W.; Alrashdi, I.; Hawash, H.; Abdel-Basset, M. DeepSecDrive: An explainable deep learning framework for real-time detection of cyberattack in in-vehicle networks. Inf. Sci. 2024, 658, 120057. [Google Scholar] [CrossRef]
- Fürnkranz, J.; Flach, P.A. An analysis of rule evaluation metrics. In Proceedings of the 20th International Conference on Machine Learning (ICML-03), Washington, DC, USA, 21–24 August 2003; pp. 202–209. [Google Scholar]
- Aksu, D.; Aydin, M.A. MGA-IDS: Optimal feature subset selection for anomaly detection framework on in-vehicle networks-CAN bus based on genetic algorithm and intrusion detection approach. Comput. Secur. 2022, 118, 102717. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Attack Type | Total Messages | Normal Messages | Injected Messages |
|---|---|---|---|---|
| Car-Hacking | DoS Attack | 3,665,771 | 3,078,250 | 587,521 |
| Fuzzy Attack | 3,838,860 | 3,347,013 | 491,847 | |
| Spoofing Attack(Gear) | 4,443,142 | 3,845,890 | 597,252 | |
| Spoofing Attack(Rpm) | 4,621,702 | 3,966,805 | 654,897 | |
| Normal | 988,987 | 988,987 | – | |
| Xiaoyu | DoS Attack | 699,055 | 582,546 | 116,509 |
| Normal | 1,359,274 | 13,592,74 | – |
| Predicted | Normal | Attack | |
|---|---|---|---|
| Actual | |||
| Normal | TN | FP | |
| Attack | FN | TP | |
| ID Type | Interval | Number |
|---|---|---|
| A | 20 | 17 |
| B | 40 | 4 |
| C | 100 | 1 |
| D | 200 | 2 |
| E | 2000 | 2 |
| Dataset | Attack Types | Accuracy | Precision | Recall | F-score |
|---|---|---|---|---|---|
| Car Hacking | DoS | 99.76% | 99.91% | 99.31% | 99.61% |
| Fuzzy | 98.66% | 99.68% | 96.38% | 98.02% | |
| Spoofing Gear | 99.48% | 99.89% | 98.66% | 99.27% | |
| Spoofing Rpm | 99.61% | 99.99% | 98.98% | 99.48% | |
| Xiaoyu | DoS | 99.60% | 99.65% | 99.45% | 99.55% |
| Model | Type | Accuracy | Precision | Recall | FS |
|---|---|---|---|---|---|
| DCNN [9] | DoS | 99.97% | 100% | 99.89% | 99.95% |
| Fuzzy | 99.82% | 99.95% | 99.65% | 99.80% | |
| Spoofing Gear | 99.95% | 99.99% | 99.89% | 99.94% | |
| Spoofing Rpm | 99.97% | 99.99% | 99.94% | 99.96% | |
| SVC(MGA) [53] | Multicalss | 98.7% | 98.7% | 98.7% | 98.7% |
| Stacking [34] | Multicalss | 98.5% | 98.7% | 98.5% | 98.5% |
| H-IDFS [13] | OCSVM-DoS | 97.28% | 100% | 96.20% | 98.06% |
| OCSVM-Fuzzy | 95.17% | 99.55% | 94.93% | 97.18% | |
| OCSVM-Gear | 100% | 100% | 100% | 100% | |
| OCSVM-RPM | 100% | 100% | 100% | 100% | |
| Hamming distance [12] | Fuzzy-NoRange | 98% | - | - | - |
| Fuzzy-SmallRange | 96% | - | - | - | |
| Fuzzy-MidRange | 20–30% | - | - | - | |
| Ours | DoS | 99.76% | 99.91% | 99.31% | 99.61% |
| Fuzzy | 98.66% | 99.68% | 96.38% | 98.02% | |
| Spoofing Gear | 99.48% | 99.89% | 98.66% | 99.27% | |
| Spoofing Rpm | 99.61% | 99.99% | 98.98% | 99.48% |
| Model | Parameters (million) | Time (ms) |
|---|---|---|
| DCNN [9] | 9.8 | 6.70 |
| Ours | 0.008 | 0.32 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, S.; Zhang, G.; Li, Y.; Li, J. Windowed Hamming Distance-Based Intrusion Detection for the CAN Bus. Appl. Sci. 2024, 14, 2805. https://doi.org/10.3390/app14072805
Fang S, Zhang G, Li Y, Li J. Windowed Hamming Distance-Based Intrusion Detection for the CAN Bus. Applied Sciences. 2024; 14(7):2805. https://doi.org/10.3390/app14072805
Chicago/Turabian StyleFang, Siwei, Guiqi Zhang, Yufeng Li, and Jiangtao Li. 2024. "Windowed Hamming Distance-Based Intrusion Detection for the CAN Bus" Applied Sciences 14, no. 7: 2805. https://doi.org/10.3390/app14072805
APA StyleFang, S., Zhang, G., Li, Y., & Li, J. (2024). Windowed Hamming Distance-Based Intrusion Detection for the CAN Bus. Applied Sciences, 14(7), 2805. https://doi.org/10.3390/app14072805