
Research on the Processing of Image and Spectral Information in an Infrared Polarization Snapshot Spectral Imaging System


 ,
,
Abstract
1. Introduction
2. Principle of PSIFTIS and the Information Reconstruction Method
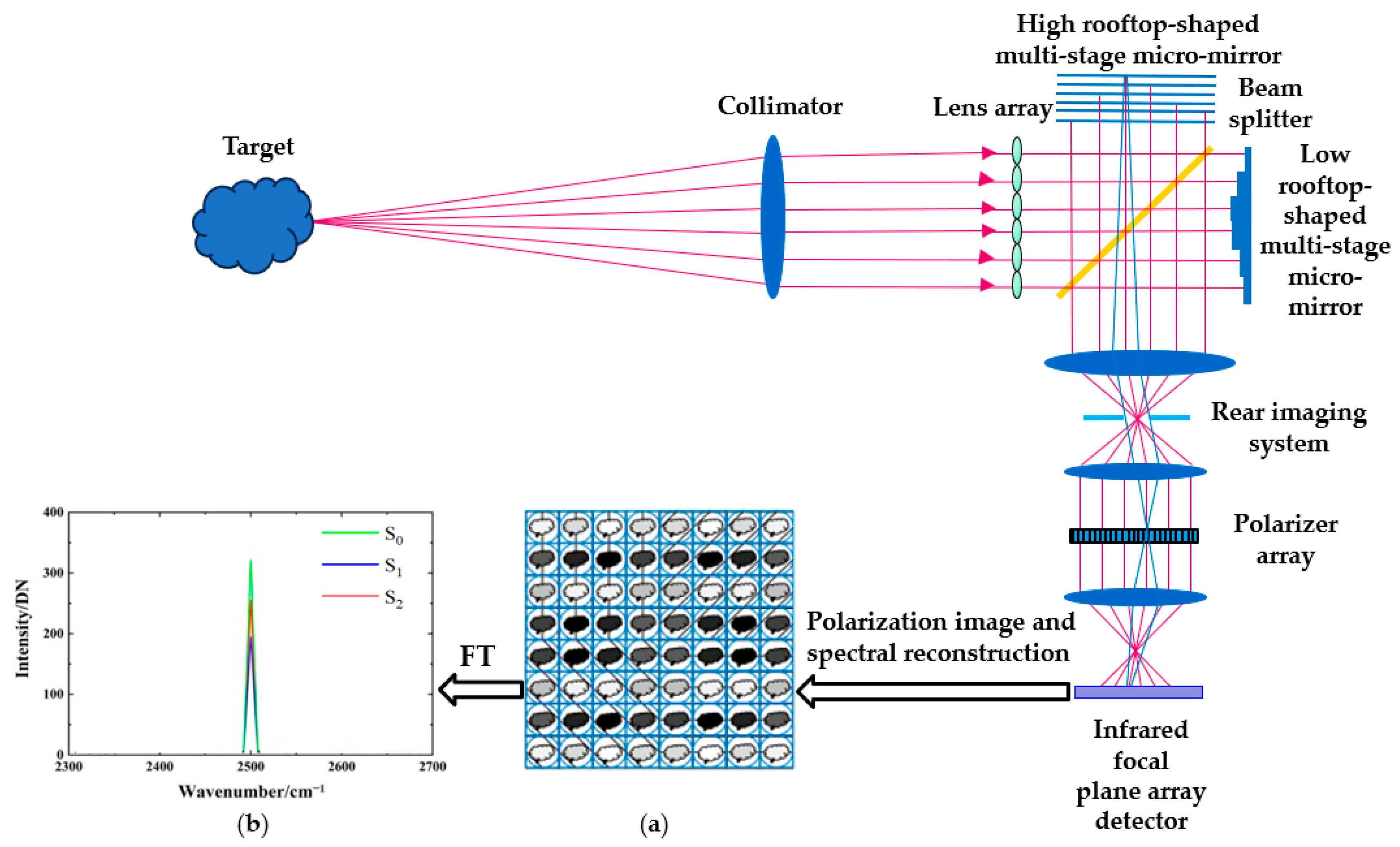
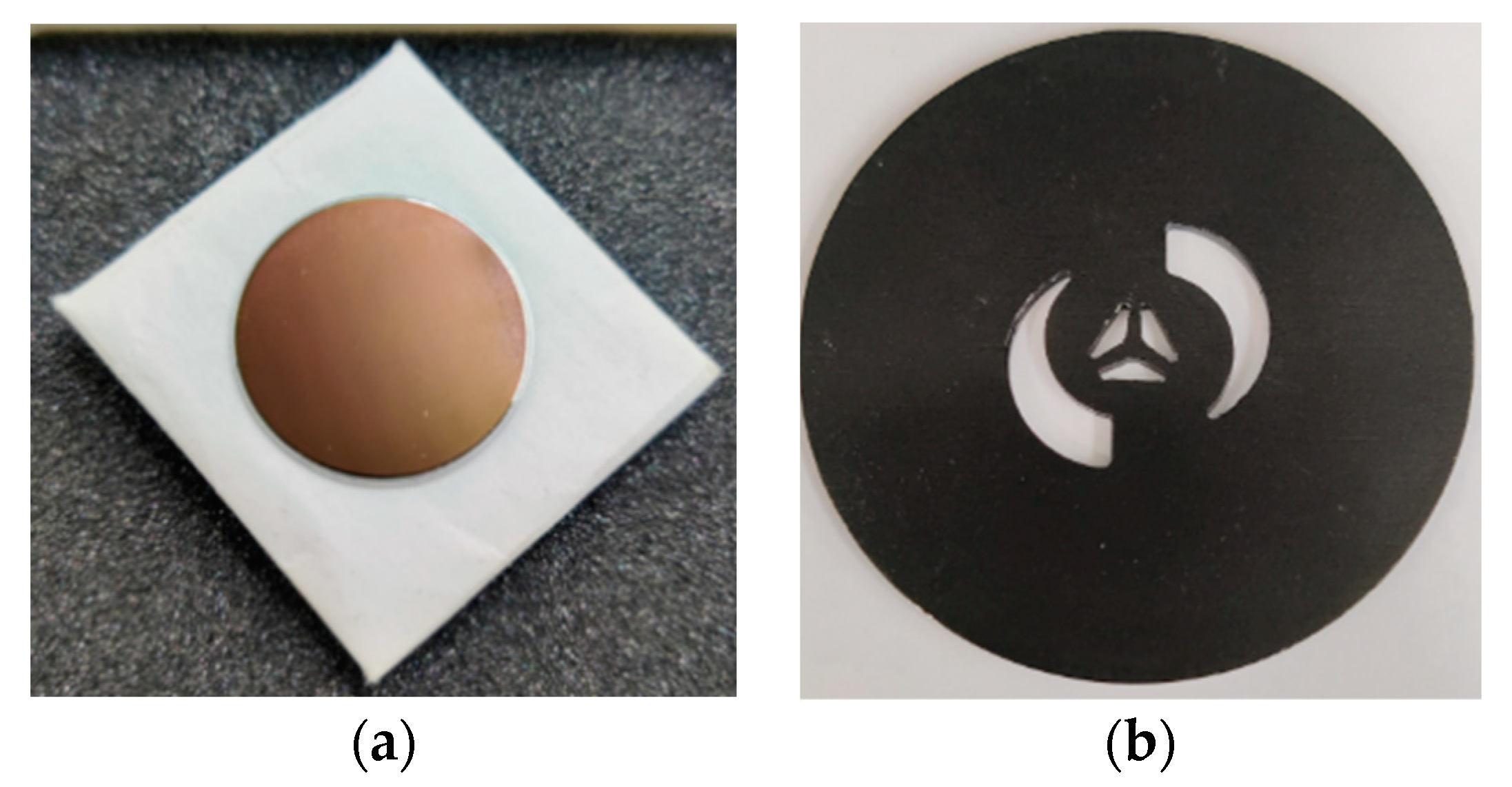
2.1. Principles of System Operation and Structural Parameters
2.2. Principle of Polarization Pattern Decoupling and Information Reconstruction in PSIFTIS
3. Algorithm Flow
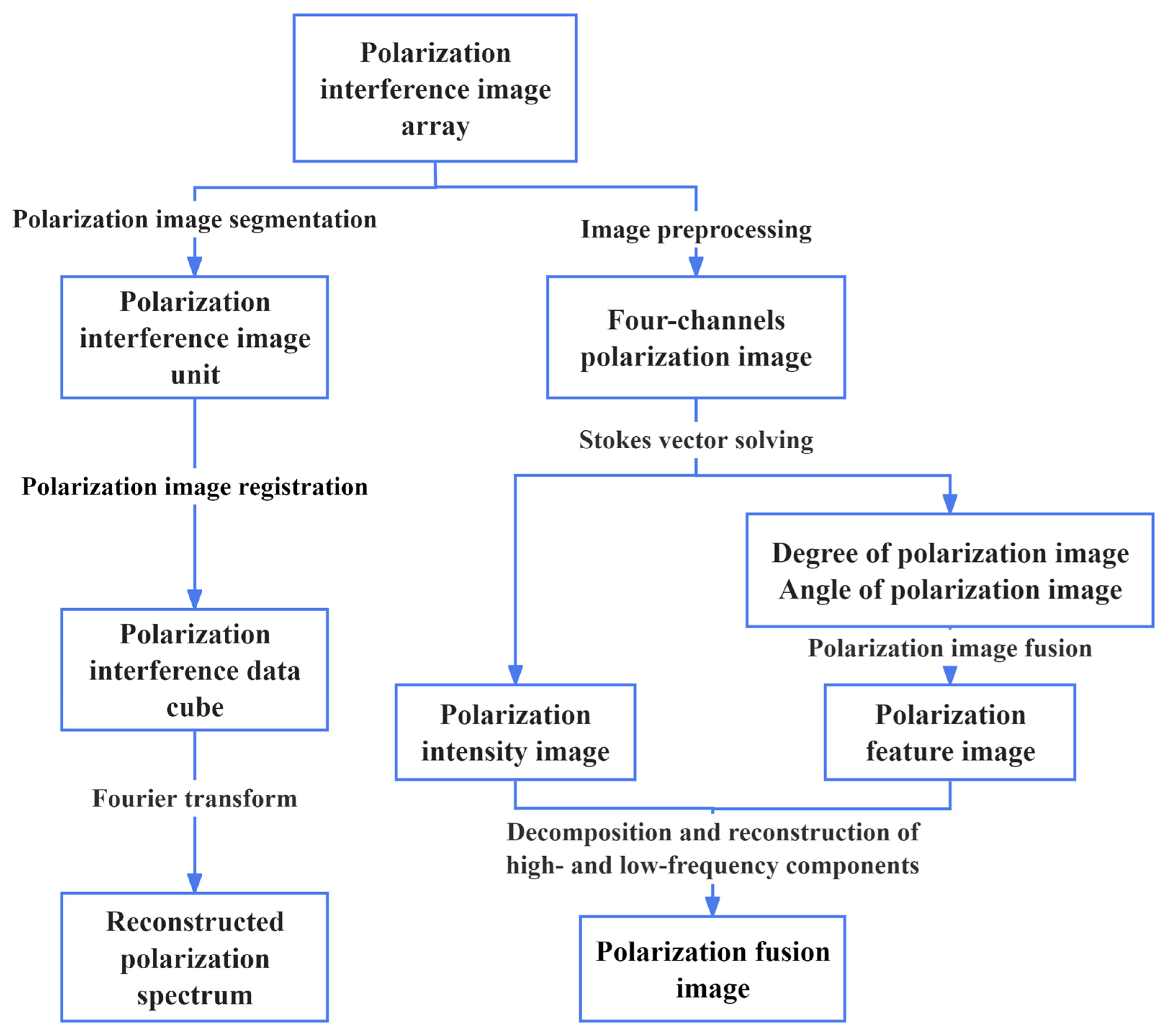
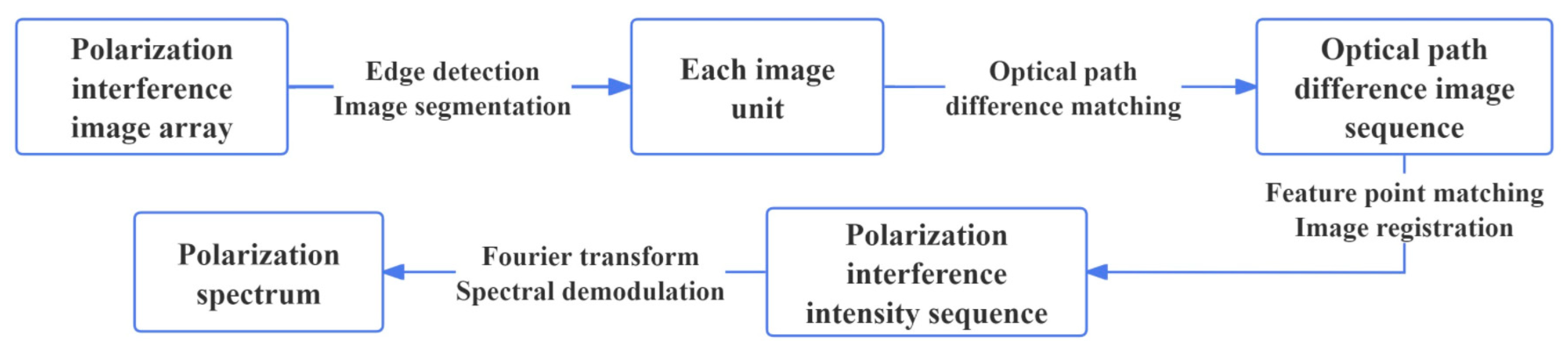
3.1. Polarization Image and Spectral Decoupling and Spectral Reconstruction
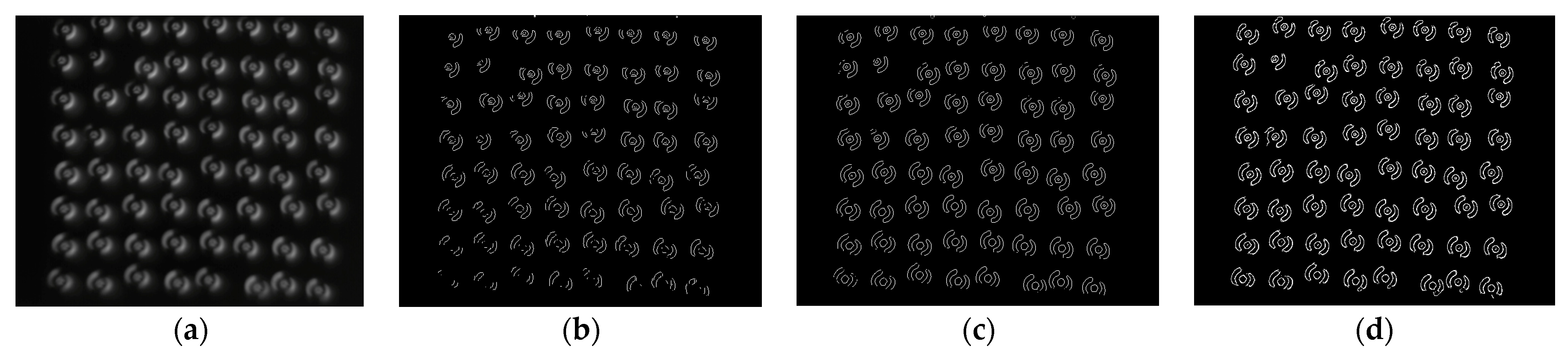
3.1.1. Polarization Interference Image Segmentation
- (1)
- Adopt the convolution kernel with the size of the enclosing circle of a single image unit, and set a threshold to traverse the image to obtain the coarse positioning set of the image unit;
- (2)
- Carry out Canny edge detection on the image to obtain the image edge information positioning set;
- (3)
- Merge the ergodic coarse positioning set through the convolution kernel and the positioning set through Canny edge detection to obtain the accurate edge information set.
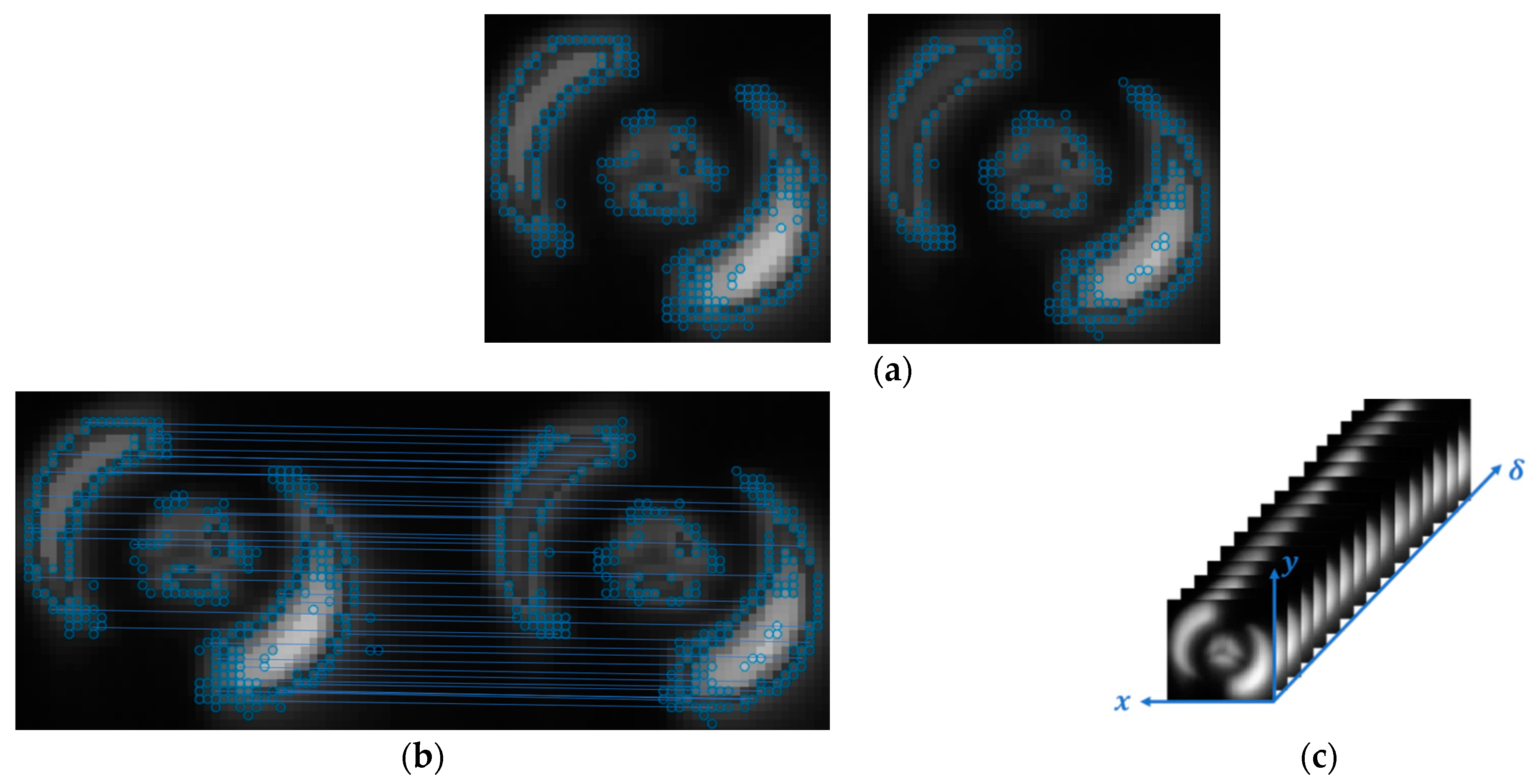
3.1.2. Polarization Interference Image Registration and Polarization Spectral Reconstruction
- (1)
- Perform SUSAN corner detection for each image unit to obtain its corner information set
- (2)
- Generate SIFT feature descriptors according to the corner information set obtained in step (1);
- (3)
- Perform SIFT feature coarse matching and RANSAC feature fine matching for each image unit to obtain the feature point information set;
- (4)
- Take the intersection of the feature points obtained in step (1) and step (3) to obtain the final feature point set and complete image registration.
3.2. Infrared Polarization Image Fusion
3.2.1. DoP and AoP Image Solution and Polarization Feature Image Fusion
3.2.2. High- and Low-Frequency Components’ Decomposition of PI and PF Images
3.2.3. High- and Low-Frequency Components’ Fusion of the Polarization Image
- (1)
- Low-Frequency Fusion of a Polarized Image
- (2)
- High-Frequency Fusion of a Polarized Image
3.2.4. Image Reconstruction Using Inverse Haar Wavelet Transform
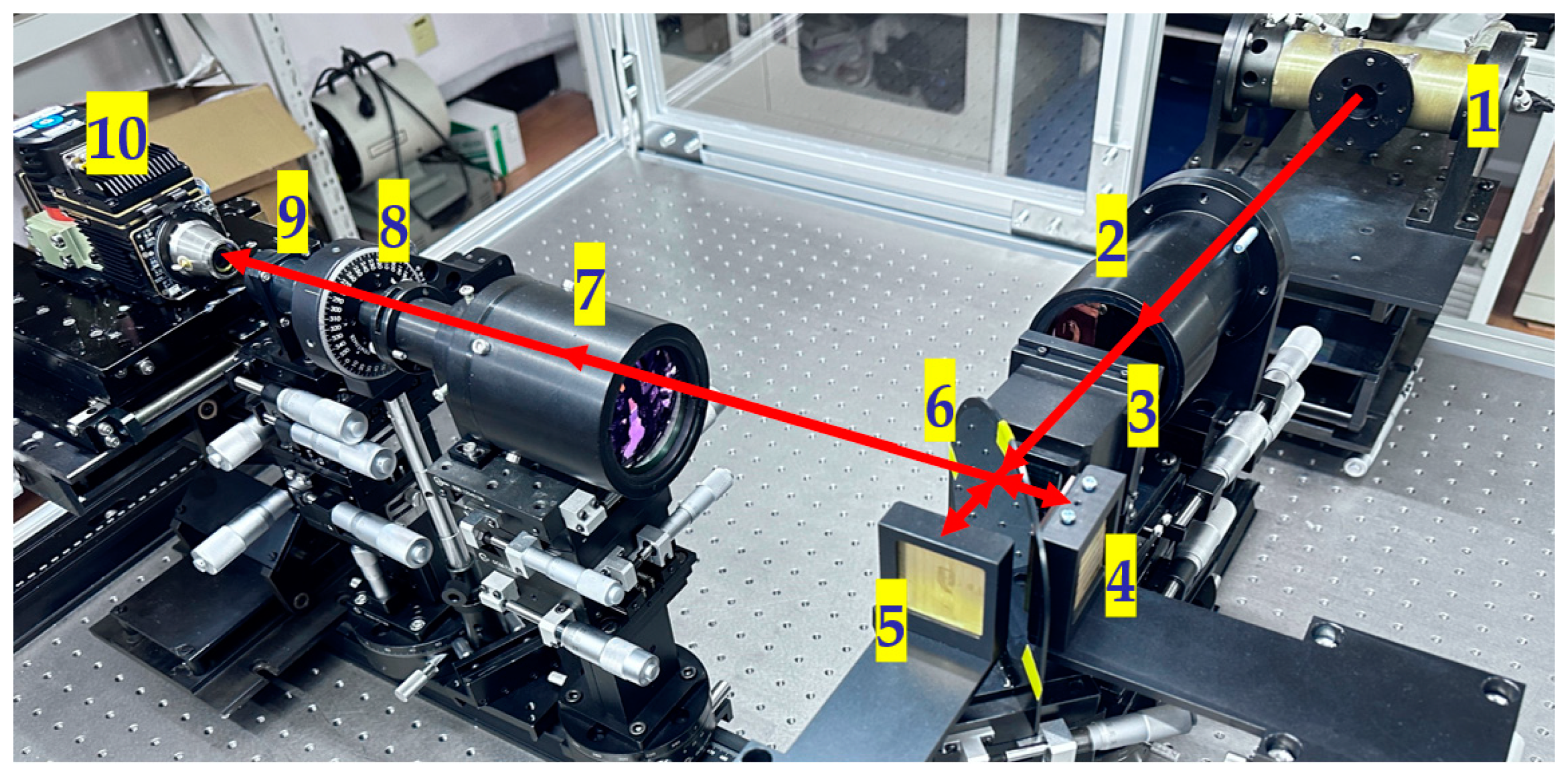
4. PSIFTIS Imaging Experiment Results and Data Processing
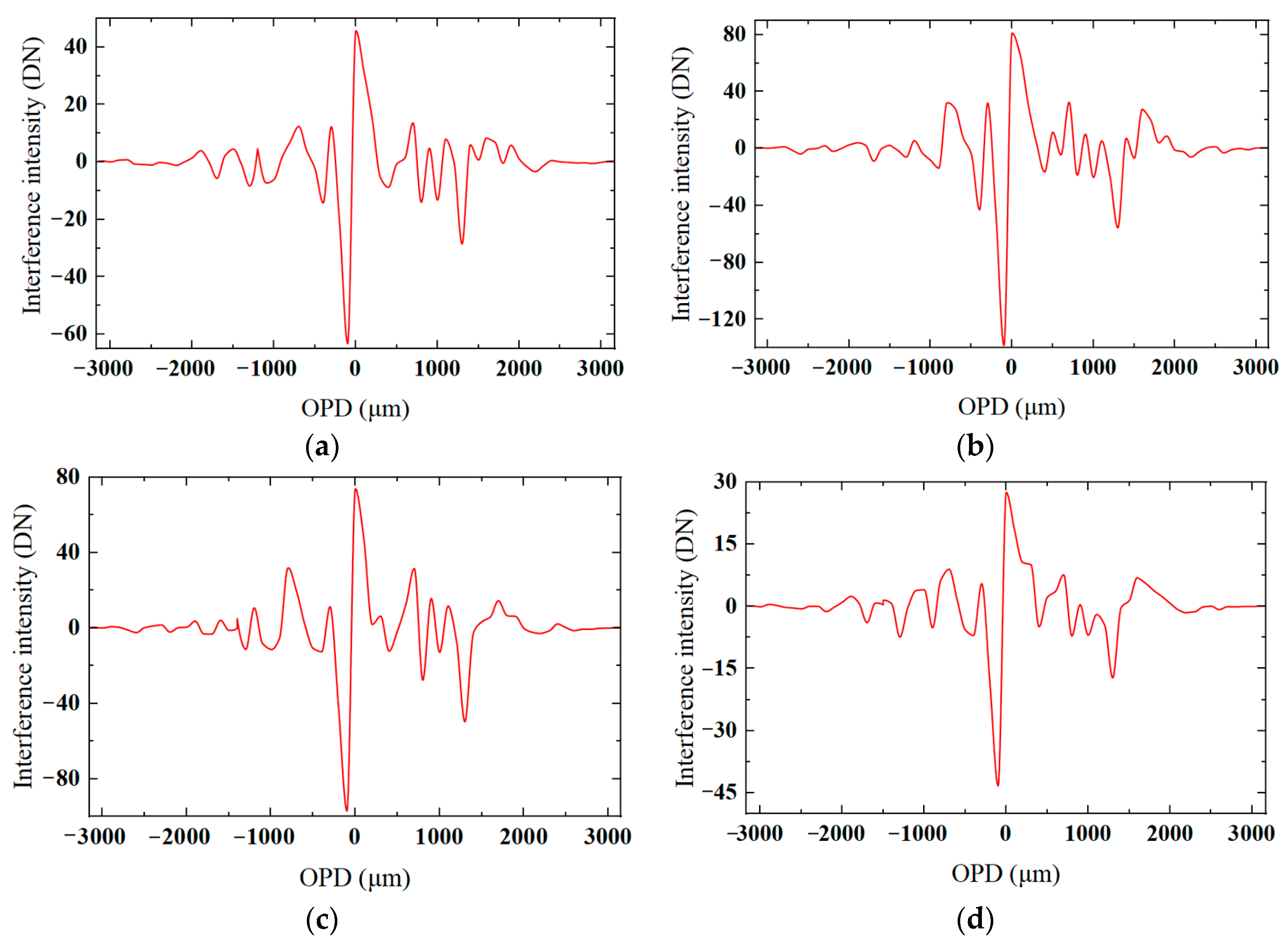
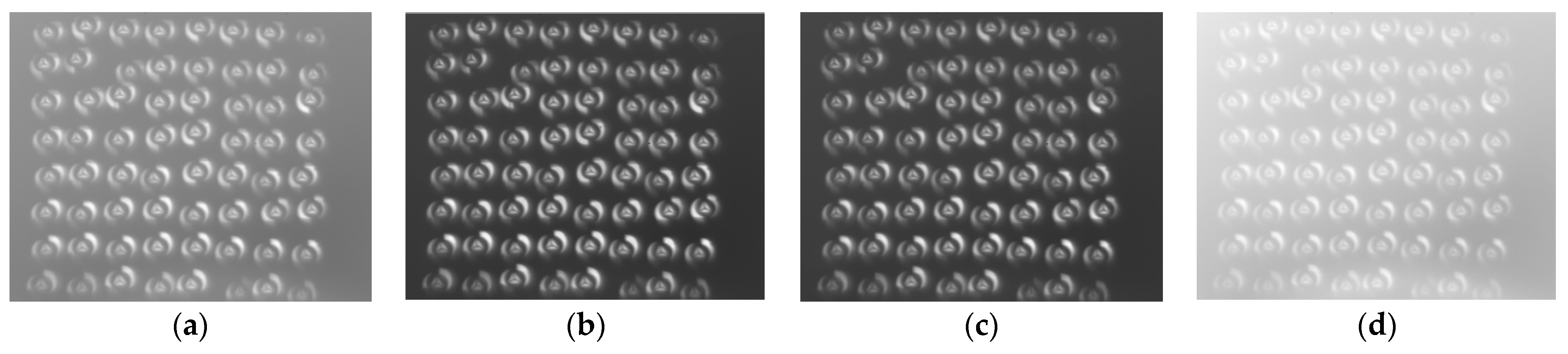
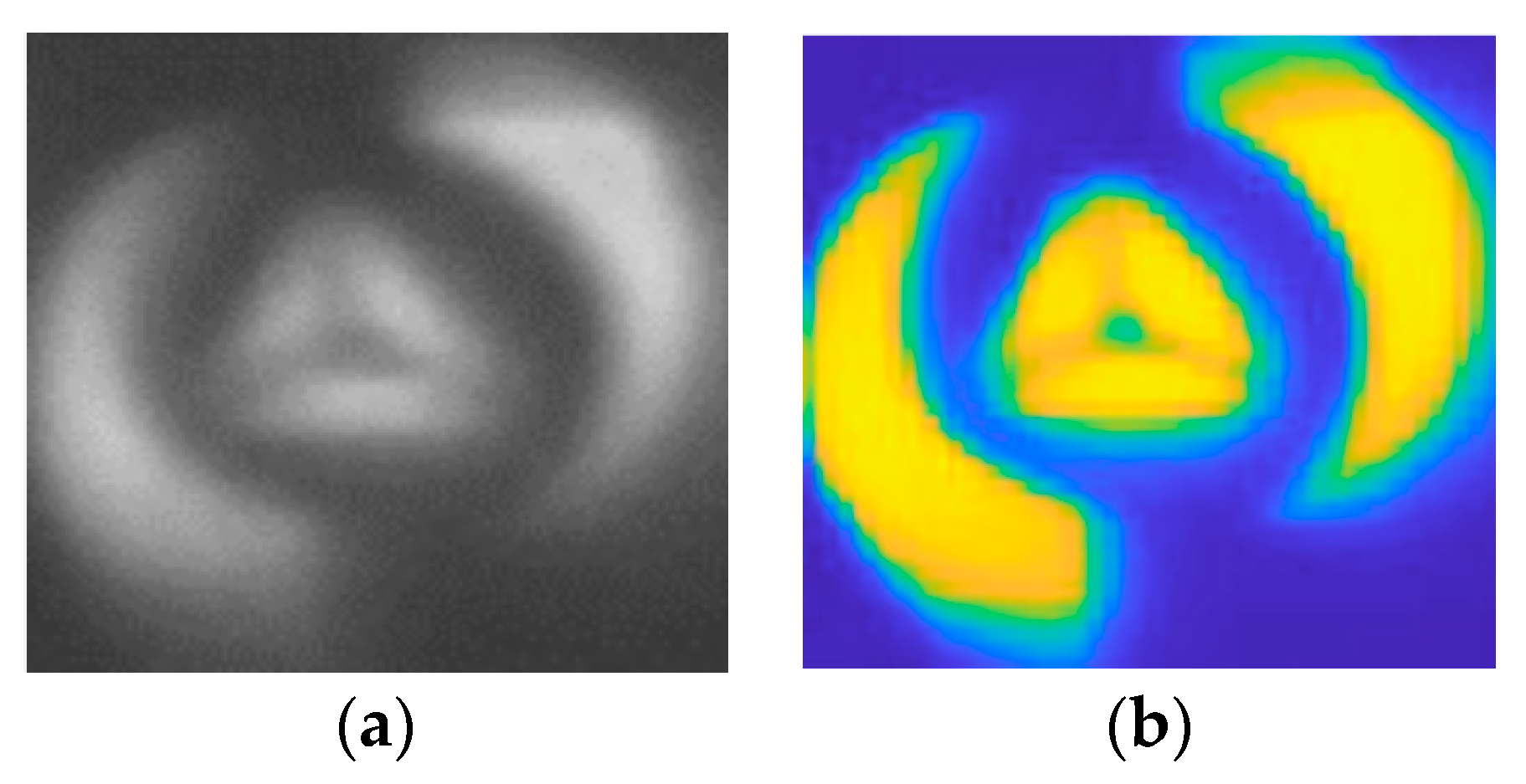
4.1. Polarization Interferometric Image Acquisition and Decoupling
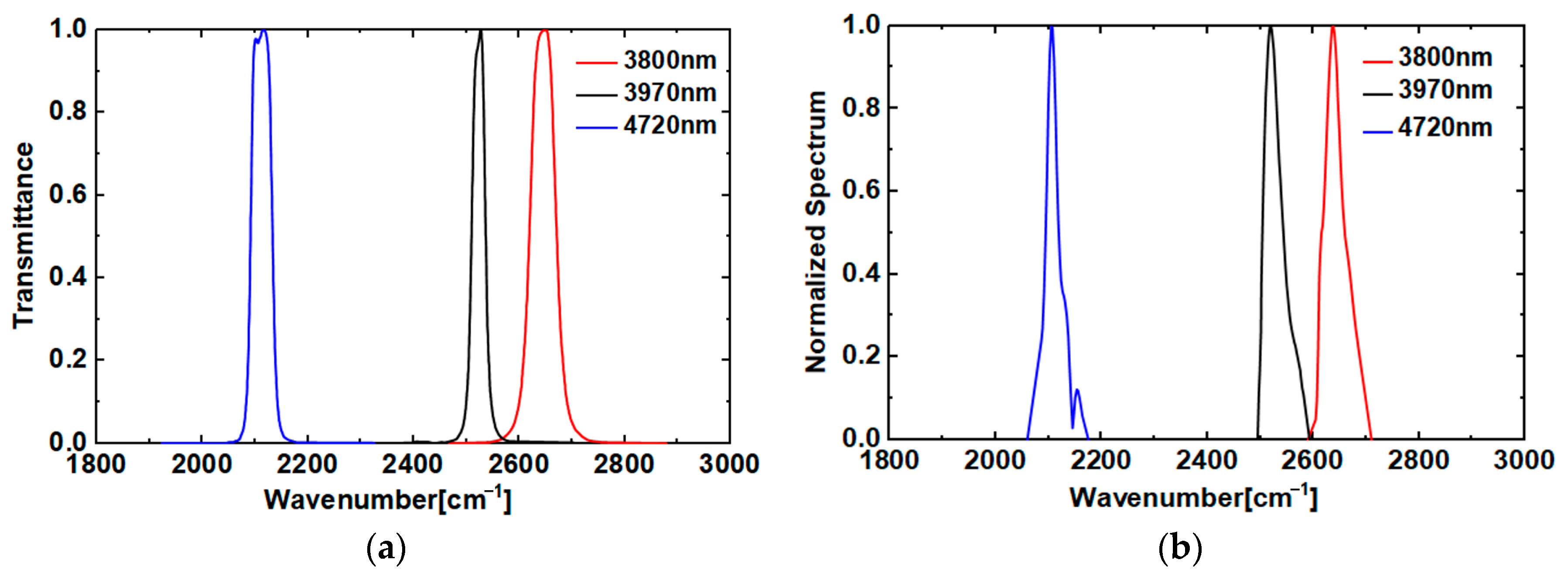
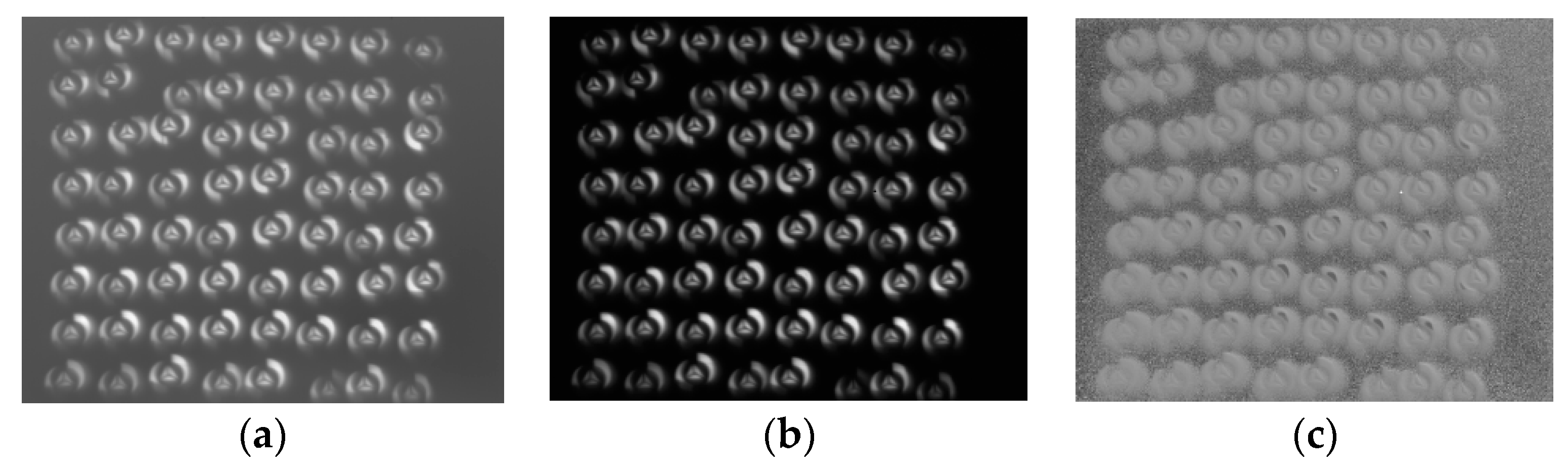
4.2. Polarization Spectral Reconstruction
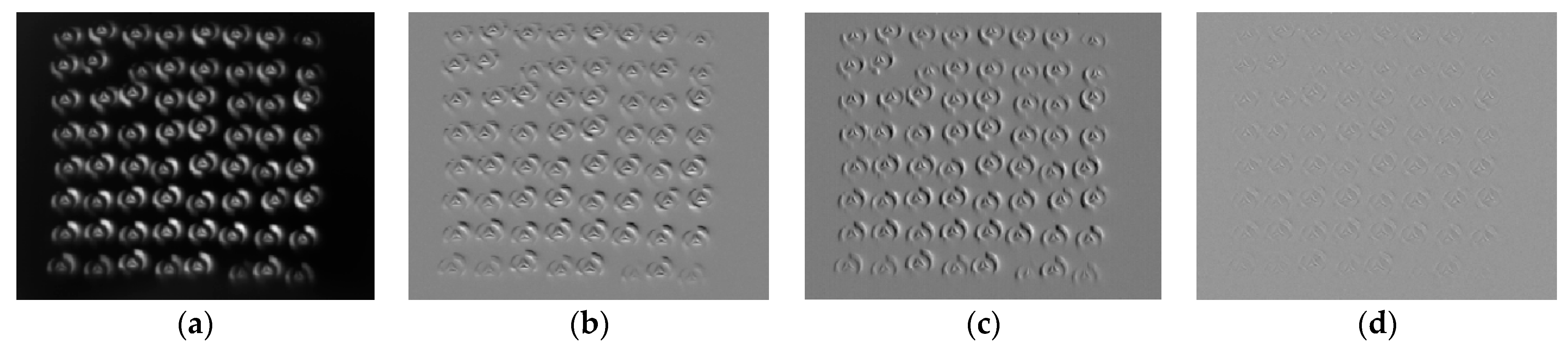
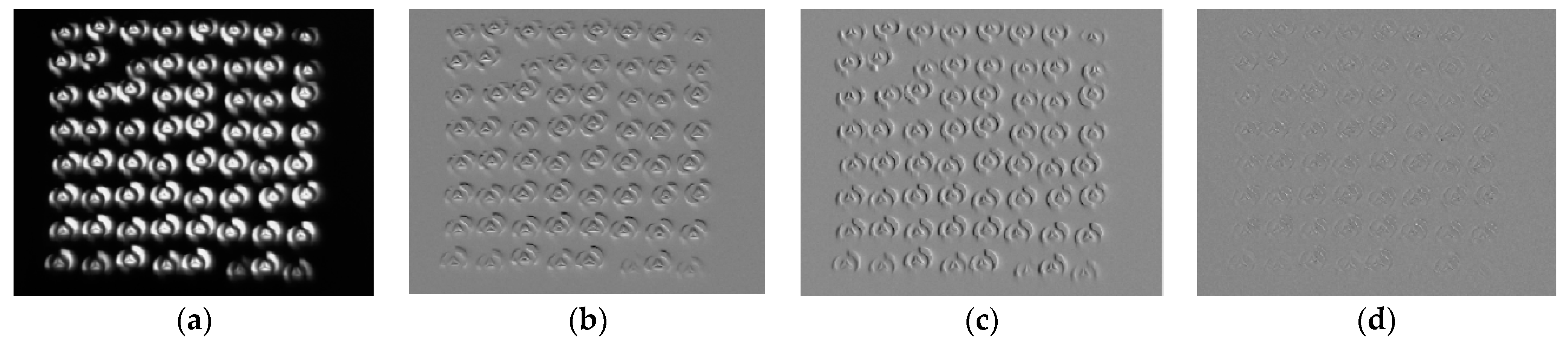
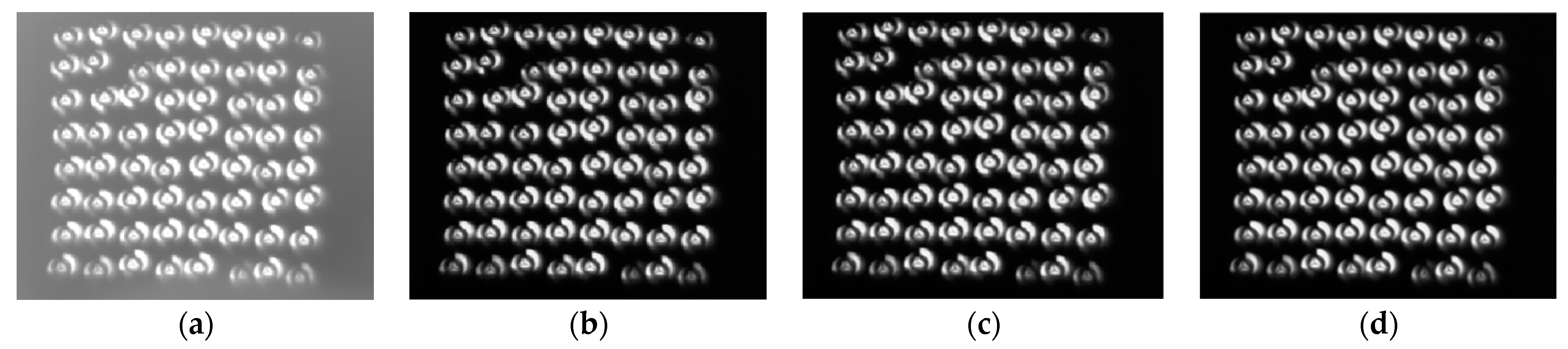
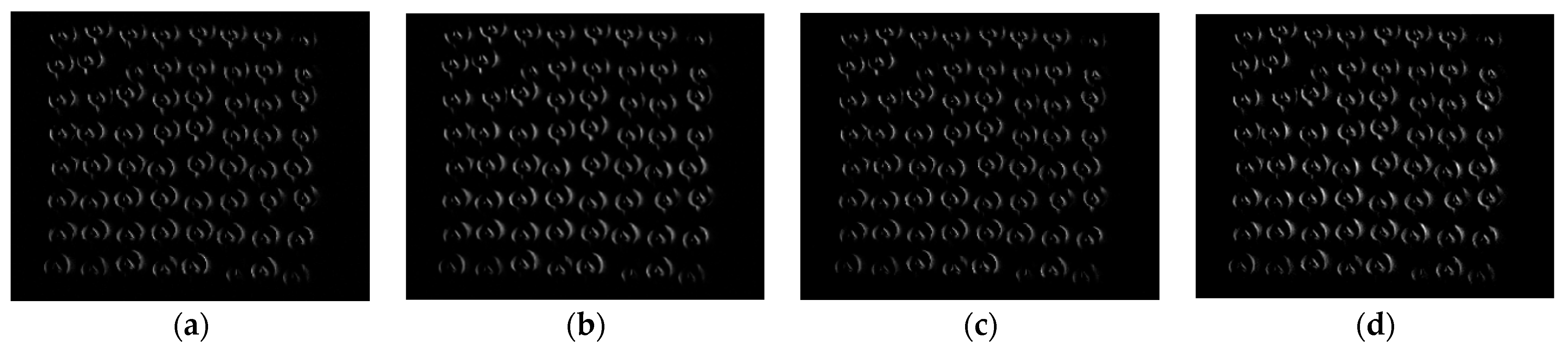
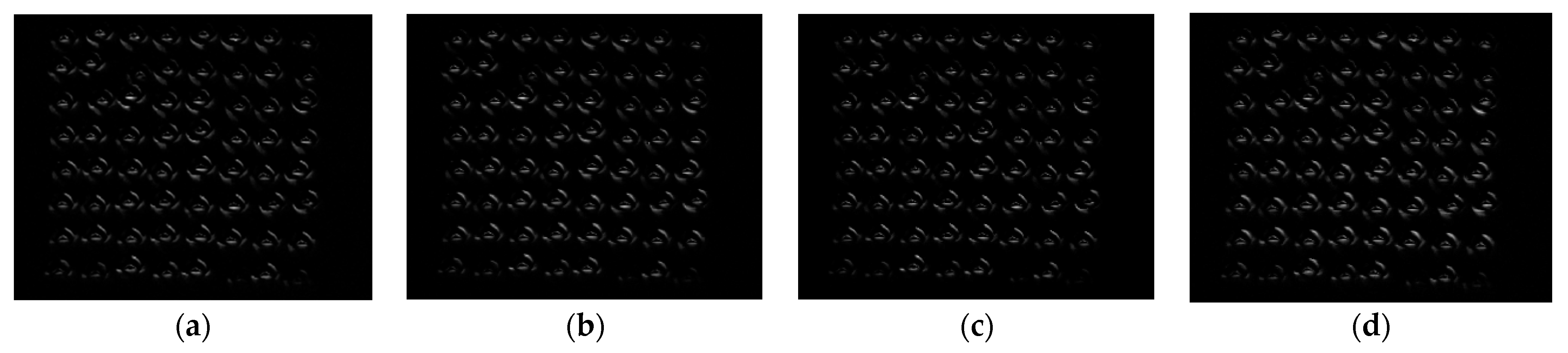
4.3. Infrared Polarization Image Fusion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cooper, A.W.; Lentz, W.J.; Walker, P.L.; Chan, P.M. Infrared polarization measurements of ship signatures and background contrast. In Proceedings of the SPIE—The International Society for Optical Engineering, Orlando, FL, USA, 3 June 1994; Volume 2223, pp. 300–309. [Google Scholar]
- Cremer, F.; De Jong, W.; Schutte, K. Infrared polarization measurements and modelling applied to surface laid anti-personnel landmines. Opt. Eng. 2001, 41, 1021. [Google Scholar]
- Jorgensen, K.; Africano, J.L.; Stansbery, E.G.; Kervin, P.W.; Hamada, K.M.; Sydney, P.F.; Pirich, A.R.; Repak, P.L.; Idell, P.S.; Czyzak, S.R. Determining the material type of man-made orbiting objects using low-resolution reflectance spectroscopy. Int. Soc. Opt. Photonics 2001, 4490, 237–244. [Google Scholar]
- Zhao, Y.; Zhang, L.; Pan, Q. Spectropolarimetric imaging for pathological analysis of skin. Appl. Opt. 2009, 48, D236–D246. [Google Scholar] [CrossRef] [PubMed]
- Frost, J.W.; Nasraddine, F.; Rodriguez, J.; Andino, I.; Cairns, B. A handheld polarimeter for aerosol remote sensing. In Proceedings of the SPIE—The International Society for Optical Engineering, San Diego, CA, USA, 2 September 2005; Volume 5888, pp. 269–276. [Google Scholar]
- Harten, G.V.; Boer, J.D.; Rietjens, J.H.H.; Noia, A.D.; Snik, F.; Volten, H.; Smit, J.M.; Hasekamp, O.P.; Henzing, J.S.; Keller, C.U. Atmospheric Aerosol Characterization with a Ground-Based SPEX Spectropolarimetric Instrument; Copernicus GmbH: Göttingen, Germany, 2014. [Google Scholar]
- Qiu, T.; Zhang, Y.; Yang, W.; Li, J. Method for feature extraction and small target detection based on infrared polarization. Laser & Infrared 2014, 44, 1154–1158. [Google Scholar]
- Yan, T.; Zhang, C.; Zhang, J.; Quan, N.; Tong, C. High resolution channeled imaging spectropolarimetry based on liquid crystal variable retarder. Opt. Express 2018, 26, 10382–10391. [Google Scholar] [CrossRef] [PubMed]
- Kozun, M.N.; Bourassa, A.E.; Degenstein, D.A.; Haley, C.S.; Zheng, S.H. Adaptation of the polarimetric multi-spectral Aerosol Limb Imager for high altitude aircraft and satellite observations. Appl. Opt. 2021, 60, 4325–4334. [Google Scholar] [CrossRef] [PubMed]
- Bai, C.; Li, J.; Zhang, W.; Xu, Y.; Feng, Y. Static full-Stokes Fourier transform imaging spectropolarimeter capturing spectral, polarization, and spatial characteristics. Opt. Express 2021, 29, 38623–38645. [Google Scholar] [CrossRef] [PubMed]
- Wang, M.; Salut, R.; Lu, H.; Suarez, M.-A.; Martin, N.; Grosjean, T. Subwavelength polarization optics via individual and coupled helical traveling-wave nanoantennas. Light Sci. Appl. 2019, 8, 76. [Google Scholar] [CrossRef] [PubMed]
- Jian, X.-H.; Zhang, C.-M.; Zhu, B.-H.; Ren, W.-Y. The data processing method of the temporarily and spatially mixed modulated polarization interference imaging spectrometer. Acta Phys. Sin. 2010, 59, 6131–6137. [Google Scholar] [CrossRef]
- Zhang, C.; Jian, X. Wide-spectrum reconstruction method for a birefringence interference imaging spectrometer. Opt. Lett. 2010, 35, 366–368. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Meng, J.; Zhou, Y.; Hu, Q.; Wang, Z.; Lyu, J. Polarization Image Fusion Algorithm Using NSCT and CNN. J. Russ. Laser Res. 2021, 42, 443–452. [Google Scholar] [CrossRef]
- Shinoda, K.; Ohtera, Y.; Hasegawa, M. Snapshot multispectral polarization imaging using a photonic crystal filter array. Opt. Express 2018, 26, 15948–15961. [Google Scholar] [CrossRef] [PubMed]
- Zhang, R.; Wang, Z.; Li, K.; Chen, Y.; Jing, N.; Qiao, Y.; Xie, K. Spectropolarimetric measurement based on a fast-axis-adjustable photoelastic modulator. Appl. Opt. 2019, 58, 325–332. [Google Scholar] [CrossRef] [PubMed]
- Chan, V.C.; Kudenov, M.; Liang, C.; Zhou, P.; Dereniak, E. Design and Application of the Snapshot Hyperspectral Imaging Fourier Transform (SHIFT) Spectropolarimeter for Fluorescence Imaging; International Society for Optics and Photonics: Bellingham, WA, USA, 2014. [Google Scholar]
- Zhao, B.; Lv, J.; Ren, J.; Qin, Y.; Tao, J.; Liang, J.; Wang, W. Data processing and performance evaluation of a tempo-spatially mixed modulation imaging Fourier transform spectrometer based on stepped micro-mirror. Opt. Express 2020, 28, 6320–6335. [Google Scholar] [CrossRef] [PubMed]
- Tao, H.; Lv, J.; Liang, J.; Zhao, B.; Chen, Y.; Zheng, K.; Zhao, Y.; Wang, W.; Qin, Y.; Liu, G.; et al. Polarization Snapshot Imaging Spectrometer for Infrared Range. Photonics 2023, 10, 566. [Google Scholar] [CrossRef]
- Owada, M.; Tajima, M.; Nagashima, Y. Polarized Light. U.S. Patent 4989076 A, 1991. [Google Scholar]
- Smith, S.M.; Brady, J.M. SUSAN—A New Approach to Low Level Image Processing. Int. J. Comput. Vis. 1997, 23, 45–78. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Shen, X.; Liu, J.; Gao, M. Polarizing Image Fusion Algorithm Based on Wavelet-cotourlet Transform. Infrared Technol. 2020, 42, 182–189. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Parameters | Value |
|---|---|
| Wavelength | 3.7–4.8 μm |
| Left/right steps | 8 |
| Low-step height | 10 μm |
| High-step height | 80 μm |
| Width of steps | 4 mm |
| Total length of reflector | 64 mm |
| AG | PSNR | EN | MI | |
|---|---|---|---|---|
| PI | 7.2223 | 4.5937 | 6.4100 | / |
| PF | 10.0424 | 10.5546 | 6.4107 | / |
| Maximum Value of Regional Energy | 8.2208 | 4.6046 | 6.4335 | 8.3545 |
| Maximum Value of Regional Contrast | 11.7738 | 10.5546 | 6.4766 | 8.3139 |
| Minimum Value of Regional Energy | 11.7746 | 10.3954 | 6.4806 | 8.3181 |
| RCD-AG-GS | 13.1196 | 57.5921 | 6.4772 | 12.9612 |
| MSE | PSNR | EN | MI | |
|---|---|---|---|---|
| PI | 10.7134 | 37.8315 | 1.0850 | / |
| PF | 10.0424 | 37.8934 | 1.1052 | / |
| Maximum Value of Regional Contrast | 10.5619 | 37.8934 | 1.1422 | 1.7644 |
| Average Value of Corresponding Pixels | 9.5830 | 37.8552 | 1.2031 | 1.6510 |
| Minimum Value of Regional Energy | 13.8219 | 36.7251 | 1.0569 | 1.7961 |
| Maximum Value of Weighted Regional Energy | 7.5514 | 39.3505 | 1.2660 | 2.0668 |
| MSE | PSNR | EN | MI | |
|---|---|---|---|---|
| PI | 9.2040 | 38.4910 | 1.0768 | / |
| PF | 10.4426 | 37.9427 | 1.0896 | / |
| Maximum Value of Regional Contrast | 10.4424 | 37.9428 | 1.1076 | 1.6908 |
| Average Value of Corresponding Pixels | 9.1250 | 38.5285 | 1.1094 | 1.5396 |
| Minimum Value of Regional Energy | 12.4729 | 37.1711 | 1.0720 | 1.6575 |
| Maximum Value of Weighted Regional Energy | 7.2628 | 39.5198 | 1.1336 | 2.0651 |
| MSE | PSNR | EN | MI | |
|---|---|---|---|---|
| PI | 0.1326 | 56.9048 | 0.2772 | / |
| PF | 0.5865 | 50.4480 | 0.7176 | / |
| Maximum Value of Regional Contrast | 0.5864 | 50.4480 | 0.2704 | 0.3121 |
| Average Value of Corresponding Pixels | 0.2245 | 54.6178 | 0.2075 | 0.2150 |
| Minimum Value of Regional Energy | 0.6054 | 50.3105 | 0.2561 | 0.2570 |
| Maximum Value of Weighted Regional Energy | 0.1171 | 57.4456 | 0.7341 | 0.7277 |
| 0° Polarization | 45° Polarization | 90° Polarization | 135° Polarization | Means of Different Polarization Images | Fusion Polarization Image Array | |
|---|---|---|---|---|---|---|
| PSNR | 34.7211 | 34.8012 | 34.7931 | 34.7033 | 34.7547 | 56.0787 |
| AG | 7.5988 | 8.9013 | 8.4875 | 6.0465 | 7.7585 | 11.4275 |
| EN | 6.6616 | 6.7024 | 6.7536 | 6.5899 | 6.6769 | 7.2470 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, B.; Lv, J.; Liang, J.; Zhao, B.; Chen, Y.; Zheng, K.; Zhao, Y.; Qin, Y.; Wang, W.; Liu, G. Research on the Processing of Image and Spectral Information in an Infrared Polarization Snapshot Spectral Imaging System. Appl. Sci. 2024, 14, 2714. https://doi.org/10.3390/app14072714
Shen B, Lv J, Liang J, Zhao B, Chen Y, Zheng K, Zhao Y, Qin Y, Wang W, Liu G. Research on the Processing of Image and Spectral Information in an Infrared Polarization Snapshot Spectral Imaging System. Applied Sciences. 2024; 14(7):2714. https://doi.org/10.3390/app14072714
Chicago/Turabian StyleShen, Bo, Jinguang Lv, Jingqiu Liang, Baixuan Zhao, Yupeng Chen, Kaifeng Zheng, Yingze Zhao, Yuxin Qin, Weibiao Wang, and Guohao Liu. 2024. "Research on the Processing of Image and Spectral Information in an Infrared Polarization Snapshot Spectral Imaging System" Applied Sciences 14, no. 7: 2714. https://doi.org/10.3390/app14072714
APA StyleShen, B., Lv, J., Liang, J., Zhao, B., Chen, Y., Zheng, K., Zhao, Y., Qin, Y., Wang, W., & Liu, G. (2024). Research on the Processing of Image and Spectral Information in an Infrared Polarization Snapshot Spectral Imaging System. Applied Sciences, 14(7), 2714. https://doi.org/10.3390/app14072714