Abstract
The introduction of a dynamic model in robot trajectory tracking control design can significantly improve its trajectory tracking accuracy, but there are many uncertainties in the robot dynamic model which can be dealt with through robust control and adaptive control. The prevailing robust control as well as adaptive control methods require real-time computation of robot dynamics, but the extreme complexity of the robot dynamics equations makes it difficult to apply these methods in real industrial systems. To this end, this article proposes a robust adaptive control method based on the desired trajectory, which uses the desired trajectory to compute most of the control terms offline, including the robot’s nominal dynamics and regression matrices, and substantially reduces the need for real-time computation of the feedback signals. The robust term modifies the perturbation of the inertial parameters of the links, the adaptive term learns the friction coefficients of the joints online, and an additional compensation term is designed to satisfy the Lyapunov stability condition of the system. Finally, taking a universal manipulator as the experimental platform, the control performances of different control methods are compared to show the feasibility of the controller and the effective reduction in real-time computational complexity.
1. Introduction
In recent years, robots have been widely used in industrial automation [1,2], the service industry [3,4], and the medical field [5,6]. In many applications, trajectory tracking control of robots is key to ensuring their accurate execution of tasks. In the early days, the PID control method, which is widely used in linear time-invariant systems, was also used in robot control [7]. However, due to the strong nonlinearity and strong coupling of the robot dynamics, the PID method has great limitations and disadvantages in the high-precision tracking of the desired trajectory. In later studies, nonlinear control was shown to be effective by introducing a dynamic model into the robot control design [8,9,10]. The realization of this method depends on the accurate robot dynamic model. However, the robot system is very complex with many uncertainties, including the error of dynamic parameters of links, unmodeled dynamics, joint friction errors, and other uncertainties in the system itself [11,12,13], as well as being affected by external uncertainties such as environmental disturbances [14] and variable loads on the end-effector [15]. Therefore, it is difficult to obtain a complete and accurate dynamic model of the robot, which restricts this model-based control method.
Typical control methods used to address robot uncertainties in existing research are robust control and adaptive control. Robust control is a deterministic control strategy, i.e., its control parameters are not adjusted online during the control process. The main principle is to assume that the system has a priori known boundaries and use the feedback signal to compensate for the uncertainties, which has the advantages of disturbance rejection and compensation for unmodeled dynamics and non-structural uncertainties [16,17]. Sliding mode control, which introduces the concept of sliding surfaces, is widely used in robot control as a typical robust control method [18,19,20]. However, in the actual control, it is inevitable that the chattering of the control signal will exist, which will damage the actuator and reduce the performance of the system [21]. Using the boundary layer design to replace the switching function with a continuous interpolation function can balance the range of uncertainties and the control effect to a certain extent [22]. Yi-Liang Yeh [23] proposed an alternative simple linear feedback control which can also avoid the control chattering. Adaptive control is based on the parameterization of the structural uncertainties in the robot. The unknown parameters are estimated online by the adaptive law, and the control strategy is modified at any time by using the estimated values of the parameters to eliminate the parametric uncertainties of the system [24]. On this basis, the introduction of neural networks and fuzzy logic can better estimate and compensate for uncertainties [25]. Nevertheless, the combined algorithm also involves complex high-order calculations, which increase the convergence time and reduce the response speed [26]. Marco A. Arteaga-Pérez et al. presented the incorporation of an adaptive term into robust control to improve the control performance, where the adaptive term is considered as a bounded disturbance and does not affect the stability of the system [27]. This work inspired subsequent researchers to combine robust control and adaptive control. In addition, a control method called model reference adaptive control [28,29] achieves tracking by introducing a reference model, giving inputs to both the real system and the reference model, recording the output errors of the two systems, and utilizing the errors for adaptive adjustment of the controller’s parameters so as to make the errors converge to zero [30,31,32]. Many of the methods proposed above ultimately use model-based control [33], i.e., there exists a nominal robot dynamic model, and the uncertainties in the remaining part are compensated for using robust or adaptive control. Therefore, they are very dependent on the real-time calculation of the robot dynamics, i.e., the position and velocity signals collected in real time are substituted into the dynamic terms for calculation. Yet, the extraordinary complexity of the robot dynamics equations makes it difficult to apply these methods in real industrial systems.
In this article, a robust adaptive control method based on the desired trajectory is designed, considering the real-time computational complexity of the control process and the objective uncertainties of universal manipulator. Specifically, a parameter identification of the robot body is carried out prior to the actual control design to obtain the inertia parameters of the links and the friction coefficients of the joints to obtain a nominal dynamic model of the robot. Then, this article classifies the objective uncertainties of universal robot into two categories according to the time span: one is long-term uncertainty, i.e., the inertia parameters of links will be slightly changed after long-term operation, deviating from the inertia parameter during identification; and the other is short-term uncertainty, i.e., the joint friction coefficients, which vary with different working conditions, environments, and even different trajectories. According to the above two types of uncertainties, a robust control term is designed to compensate for the inertia parameters’ perturbation of the links, and an adaptive control term is designed to learn the change of the friction coefficients of the joints online during the control process in order to correct them. On this basis, the proposed method innovatively employs the desired trajectory instead of the real-time feedback signal in the traditional method for the computation of the nominal dynamic term and the regression matrix (the core part of the robust adaptive control term), and additionally designs the compensation term in order to mathematically satisfy the Lyapunov stability condition of the system in a rigorous manner. The contributions of this article are summarized as follows.
- Compared with the traditional robust adaptive control method, which requires real-time computation of the robot’s complex dynamic model and regression matrix during the control process, the proposed method computes most of the complex control terms using the a priori known desired trajectory, so that the computation results can be stored before the start of the control and only the stored results need to be queried during the real-time control, thus greatly reducing the need for real-time computation of the feedback signals. Therefore, it is guaranteed that the controller can be realized even on universal manipulators with poor computational power.
- The objective uncertainties of the universal robot are classified according to the time span, and robust adaptive control is used to compensate the error caused by the uncertainties. Combined with the above use of the desired trajectory to calculate most of the control items, an additional feedback control item is designed to strictly prove the Lyapunov stability of the proposed method.
- Instead of a simulation, experiments are carried out on a real universal manipulator to compare the results with traditional PID, dynamics feedforward control, real-time robust adaptive control, and one state-of-the-art control method. The feasibility and rationality of the control method proposed in this article are analyzed in terms of control performance and real-time computational efficiency.
The remainder of the article is structured as follows: Section 2 describes the preliminaries needed for modeling robot dynamics and controller design. In Section 3, the structure of the robust adaptive controller based on desired trajectory is presented and the Lyapunov stability of the control system is proved theoretically. Comparative experiments on an universal manipulator are conducted in Section 4, and the effects are analyzed and discussed as an illustration of the feasibility and superiority of the proposed control method. Finally, the conclusion is presented in Section 5.
2. Dynamic Model and Preliminary
This section firstly models the dynamics of the universal manipulator. Secondly, the properties of the model are presented and reasonable assumptions for uncertainties are included to prepare for the subsequent controller design.
2.1. Dynamic Model
For a universal six-axis manipulator, the dynamic model can be expressed as:
where , , , and , respectively, are the inertia matrix, the Coriolis and centrifugal matrix, the gravity vector, and joint friction vector; represent the joint positions, velocities, and accelerations; and is the control output in the form of torque. The joint friction term is taken by the most widely used Coulomb-viscous friction model:
where , , and the diagonal elements are constants.
2.2. Properties and Assumptions
The dynamics are first reconstructed into a linear form with respect to the dynamic parameters.
Theorem 1.
(Parameter linearization) The dynamic model in (1) can be linearized by parameters as follows:
where are arbitrary reference vectors, which will be defined as model reference state variables in the controller design; and is the regression matrix of the dynamic term of the links with respect to the inertial parameters . Specifically:
where represents the regression matrix of link with respect to the inertial parameters of link , which can be shown as follows:
Respectively, there are six independent parameters in the inertia matrix , the mass moment in three directions, and the mass of the link. Therefore, , .
Correspondingly, is the regression matrix of the joint friction term with respect to the Coulomb friction coefficients and viscous friction coefficients. Specifically:
where the diagonal elements are the regression terms of the friction moment of joint with respect to the Coulombic friction coefficient and the viscous friction coefficient . Therefore, , .
Theorem 2.
(skew-symmetry) When the Coriolis and centrifugal matrix
follow the definition of Christoffel symbols (of the first kind), the matrix obtained by the following expression is a skew-symmetric matrix:
where the element of satisfies .
Theorem 3.
(Boundedness of inertial matrix) The inertia matrix is symmetric positive definite. For a robot containing only rotational joints, the elements of the contain only terms involving the sine and cosine functions, so that the constants and can be found, providing consistent bounds in the inertia matrix, i.e.,
The above inequality is interpreted in the sense of the matrix inequality, i.e., if , it means that the matrix is positive semidefinite.
Next, the uncertainties are analyzed.
In view of the linearization of the robot dynamic model with respect to the link inertia parameters and the joint friction coefficients in Equation (3), the following reasonable assumptions are made:
Assumption 1.
After long-term operation of the robot, the inertial parameters of the links will be perturbed within a certain range, and the boundary can be estimated in advance as follows:
where and are both known constant vectors, which are the lower and upper bounds of , respectively. Furthermore, it is considered that is constant during the control process.
Assumption 2.
In the actual working process, the joint friction coefficients will change with different working conditions, environments, and even different trajectories, which need to be dealt with adaptively during the control process.
3. Controller Design
In this section, a robust adaptive controller based on the desired trajectory is designed to meet the control tasks of the universal six-axis manipulator. In summary, the controller consists of four parts. The first is the nominal dynamics feedforward term calculated by the desired trajectory. The second is the robust term to correct the perturbation of the inertial parameters of the links. Then, the adaptive term is used to learn the friction coefficients of the joints online. Lastly, a compensation term is designed to satisfy the Lyapunov stability of the system. The control scheme is shown in Figure 1.
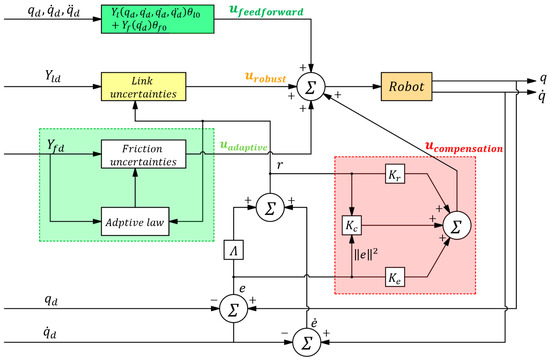
Figure 1.
Block structure of nonlinear robust adaptive control based on desired trajectory.
3.1. Nominal Dynamics Feedforward
Firstly, based on the results of parameters identification, combined with the properties of parameter linearization in Equation (3), the nominal dynamic model of the robot can be obtained:
where and are the inertia parameters of the links and joint friction coefficients obtained via the identification, respectively. From Assumptions 1 and 2, it can be seen that the above coefficients are uncertain, so the dynamic model obtained by the original identification of the parameters is called the nominal dynamic model.
According to the Equation (10), the variables are all real-time signals measured by the sensors in the control process. and the following calculations are carried out using the desired trajectory to obtain the first term in the controller, i.e., the nominal dynamics feedforward term:
where represent the desired joint positions, velocities, and accelerations, respectively. In the following derivation, is denoted by , and is denoted by ; similarly, is denoted by , and is denoted by .
3.2. Lyapunov Feedback Compensation Design
Since the desired trajectory is used to compensate the dynamic model of the robot, it will inevitably affect the control. In the following, the compensation control term is designed based on the Lyapunov stability theory.
The position error during trajectory tracking is denoted as . Based on the theory of sliding mode control, the model reference velocity is denoted as , and the model’s reference acceleration is denoted as , which introduces the reference velocity error:
where and are mentioned in Equation (3), and is a symmetric positive-definite matrix. The reference velocity error will be shown as a state variable of the control system in the subsequent proof.
Next, a lemma is given in advance for use in the subsequent proof.
Lemma 1.
For robotic systems, the error due to the use of desired trajectory computation to compensate for the dynamics can be bounded by a priori known non-negative constants [34]:
where is the Euclidean norm of .
Now, the design of each control term is given below:
where is the nominal dynamics feedforward term from Equation (11), and and are the robust and adaptive terms, whose implementation will be developed in detail in the next two subsections. denotes the error between the online estimated friction coefficients and the initial friction coefficients. The update law of is given in the design of . , , and are symmetric positive definite matrices. In this subsection, the design of the feedback compensation control term is mainly considered.
The following design is based on Lyapunov stability theory.
For the control system, the position error and the reference velocity error are selected as the state variables. Based on the Lyapunov stability theory, the positive definite function is selected as the Lyapunov function:
Taking the derivative of in Equation (15) with respect to time, we have:
Substituting the total output of the control system in Equation (14) into the robot dynamics in Equation (1) gives:
Both sides of Equation (17) are simultaneously subtracted from both sides of Equation (3), and we obtain:
Note that . Equation (18) can be organized as:
This is the closed-loop dynamics equation with respect to the state variable of the control system. Substituting it into Equation (16), we have:
According to Theorem 2, . is denoted as the perturbation value of inertia parameters of links, and is denoted as the error between the online estimated friction coefficients and the initial friction coefficients. Then, we have:
Substituting the error in Equation (13) into the above equation and noting that gives:
Here, we break it down into three parts:
where is the derivative term corresponding to the feedback compensation control term, is the derivative term corresponding to the robust control term, and is the derivative term corresponding to the adaptive control term. The following analyzes the conditions under which is a negative definite function.
where is the smallest eigenvalue of the matrix . Note that are nonnegative. is chosen to satisfy
Equation (24) can be further written as:
Note that
Then, the appropriate , , and are selected to satisfy that the matrix is a positive definite matrix, which can ensure that .
At this point, the design of the compensation control term can be completed by satisfying Equation (25) and also satisfying that is a positive definite matrix.
3.3. Robust and Adaptive Control Terms Design
This subsection focuses on the robust control term, which deals with the perturbation of the inertial parameters of links, and the adaptive control term, which provides online estimation of the variation of the joint friction coefficients. The specific design is given below, and the proof of the corresponding derivative terms (, ) is given in the next subsection.
3.3.1. Robust Control Term
The perturbation of the inertial parameters of the links is . According to Assumption 2, there is a non-negative constant , which satisfies:
Therefore, the robust control term can be designed as follows:
where is an optional positive constant, which will be analyzed in the subsequent subsection.
3.3.2. Adaptive Control Term
Up to now, only in in Equation (14) remains to be given its expression. Since , the adaptive term can be determined only by giving the update law of the joint friction coefficients .
The update law is given as follows:
where is a symmetric positive definite matrix which will be analyzed in the subsequent subsection.
3.4. Stability Analysis
Based on the design given above for each control item of the control system, the stability of the control system is analyzed below.
Theorem 4.
(Asymptotic Tracking) When the robust adaptive control law in Equation (14) based on the desired trajectory is applied to the trajectory tracking control of the robot, the asymptotic tracking stability of the system can be guaranteed.
Proof of Theorem 4.
Firstly, according to Equation (26), we agree that ; then:
The and in Equation (23) are the derivative terms of the Lyapunov function corresponding to the robust and adaptive control terms, respectively. In addition, due to the introduction of the online estimated joint friction coefficients , it is necessary to add a state variable to the Lyapunov function:
Finally, the derivative of the final Lyapunov function of the control system is written as:
Combining Equations (23), (31) and (32), Equation (33) is further written:
Notice that the joint friction coefficients can be regarded as constant during a control process, so . The parameter update law in Equation (30) is substituted into Equation (33) to obtain:
According to the Equation (29) for the robust term , it is illustrated in two cases.
- Case 1: When , substitute it into Equation (35), and let , then:According to Equation (28), it can be seen that , so the above equation can be written as:At this time, according to Lyapunov stability theory and the Barbalat lemma, the system is stable, that is, and globally converge to 0.
- Case 2: When , substitute Equation (2) into Equation (35); then:In order to make the above equation less than 0, it is necessary to satisfy:And ; therefore:Equivalently,Since , is constantly negative when the above equation is satisfied. Eventually, the state variable of the system will be retained in the final bounded set, i.e., the bounded set surrounded by the right side of the above equation, and thus, the uniform ultimate boundedness of the system is proven. □
3.5. Comparative Study
At the end of this section, a comparative study is carried out to illustrate the advantages of the proposed method.
The core comparison of the proposed control method is the real-time robust adaptive control method, whose control law is given by:
Each of these items corresponds to the control method of Equation (14). It is worth noting that, compared with the proposed control method, the regression matrix here is calculated by the state variables measured by the sensors in real time. Due to its use of real-time compensation, the additional feedback control term is no longer required. In addition, the robust control term and the adaptive law both correspond to the above Equations (29) and (30), except that the independent variables of the regression matrices are replaced with real-time state variables.
Next, we consider the real-time computation process of the controller at each moment in the actual control process. It is not difficult to find that, for any control term that utilizes real-time state variables for the regression matrix calculation, due to the high coupling characteristics of robot dynamics equations, its calculation time will be greatly slower than other control terms that only require simple matrix multiplication. Therefore, if the controller’s real-time computing power is weak, the obtained control output will be seriously delayed, thus affecting the control effect.
The control method based on the desired trajectory proposed in this article, on the other hand, completely omits the need for real-time calculation of the regression matrix, and the regression matrix at each moment can be calculated offline. Therefore, in the actual control process, the control terms can be calculated directly using the offline computed regression matrices.
4. Experiment and Discussion
In this section, the trajectory tracking task will be performed on an actual universal manipulator. The control method designed in this article, traditional PID, dynamics feedforward control, real-time robust adaptive control, and a state-of-the-art method are taken to accomplish the control task. The control effects and real-time computational complexity of each control method are compared and analyzed, so as to illustrate the rationality and superiority of the control method proposed in this article.
4.1. Experimental Setup
The universal robot equipment used in the experiment was a universal six-degree-of-freedom manipulator developed by a Chinese company, Si Valley (Hefei, China) [35]. As shown in Figure 2, the manipulator had a load of 3 kg and a compact structure. The controller adopted its self-developed cSPACE rapid control prototype development system [36]. The software was developed based on ARM Cortex-A and Matlab/Simulink R2023a. Combined with computer simulation and embedded real-time control calculation, it can realize the function of a hardware circuit and rapid control prototype design.
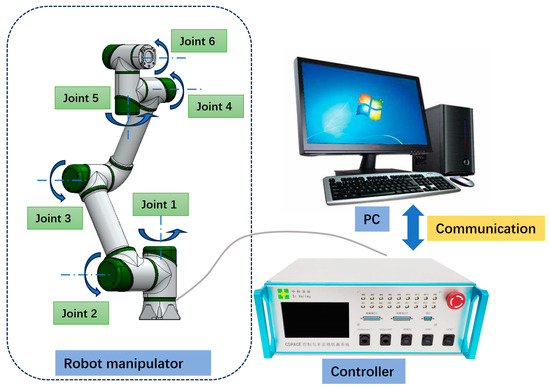
Figure 2.
The experimental setup.
The control algorithm was developed in the Simulink environment. Then, the program in PC was transferred to the controller through the network, at which point the controller automatically ran the user’s program and established communication with the host computer.
The tracking error of each joint was calculated by the joint position and velocity signals measured by the sensors in order to compare the control effects of different control methods.
The flowchart of the proposed controller design is given in Figure 3 for reference.
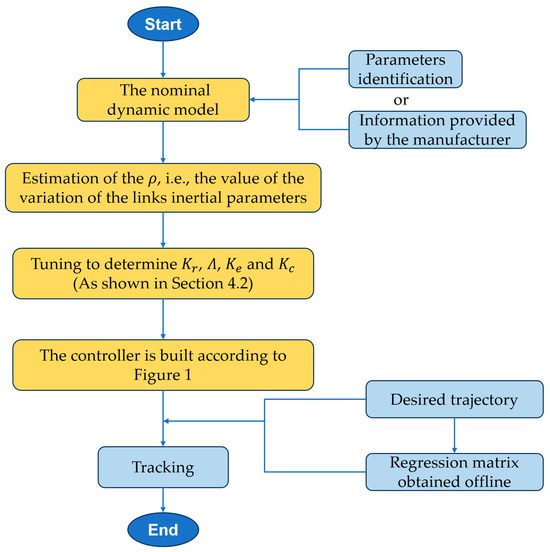
Figure 3.
The flowchart of the controller design.
4.2. Single Joint Tuning Using Sine Trajectory
Firstly, the proposed robust adaptive control method was tuned by applying a sine trajectory with an amplitude of 30° to each joint to adjust control parameters , , , and .
According to Equation (12), is the main state variable in control system, so determines the speed at which converges to the sliding mode surface and has the most important influence on the control performance. It can be adjusted to as large as possible without causing oscillations. determines the speed at which the system position error e converges to 0 along the sliding mode surface after reaching the sliding mode surface, which can be determined based on the actual achievable closed-loop bandwidth. Secondly, is adjusted to further determine the speed at which the position error converges horizontally to 0. The specific effect is shown in Figure 4, which represents a two-phase diagram of the and . is chosen simply by satisfying Equation (25).
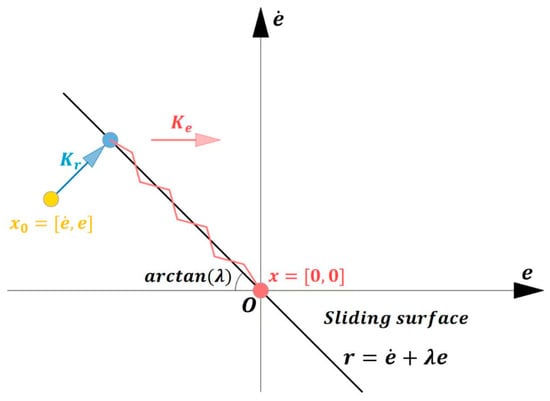
Figure 4.
Two-phase diagram of single joint parameter tuning.
The following takes the second joint with the most complex dynamic characteristics as an example for parameters tuning. According to the closed-loop bandwidth, is selected. Figure 5 shows the results of the angular position of the second joint when a different was selected. Figure 6 shows the results of the corresponding angular position errors.
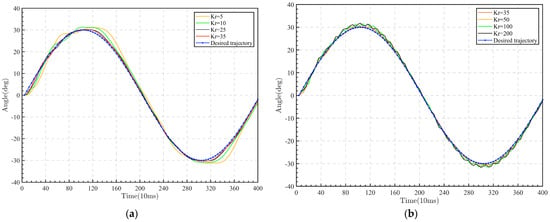
Figure 5.
(a) Joint angular position when = 5, 10, 25, and 35; (b) joint angular position when = 35, 50, 100, and 200.
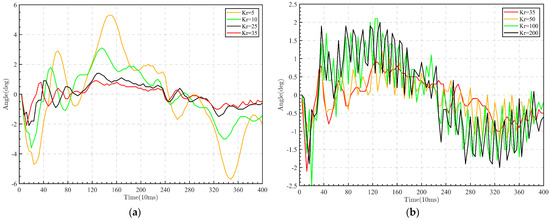
Figure 6.
(a) Joint angular position errors when = 5, 10, 25, and 35; (b) joint angular position errors when = 35, 50, 100, and 200.
The following Table 1 records the control indices using different values of .

Table 1.
The arithmetic mean of , , and using different values of .
It can be seen from Table 1 that with the increase in , the relevant error indices demonstrated a trend from large to small and then to larger. The speed error reflects the shaking in the motion. Therefore, after weighing the two items of and , was selected as the final control parameter, and was selected accordingly. In Figure 5 and Figure 6, it can be found that the tracking performance of the red curve corresponding to had a significant advantage over other curves.
The selection of parameters in the experiment is given in Table 2.
Table 2.
Parameters used in the experiment.
4.3. Multiple Joints Tracking Using Circular Trajectory
After tuning the control parameters for each joint, the desired trajectory of a circle drawn in the vertical plane was designed and utilized to conduct trajectory tracking experiments. The proposed robust adaptive control method based on the desired trajectory was also compared with some algorithms in the literature, including traditional PID control, dynamics feedforward control, and the real-time robust adaptive control method illustrated in Section 3.5. Moreover, in order to objectively illustrate the control effect of the proposed method, we reproduced a novel, robust adaptive control method mentioned in the literature [27] for comparison. For the sake of fairness, all methods used equivalent control gains in the experiment, as shown in Table 2.
A diagram of the desired trajectory for robot tracking is shown in Figure 7. The end-effector moved along the circular trajectory in the YZ plane. It can be seen that the fifth and sixth joints remained locked, and the control effect of the first four joints is shown below.
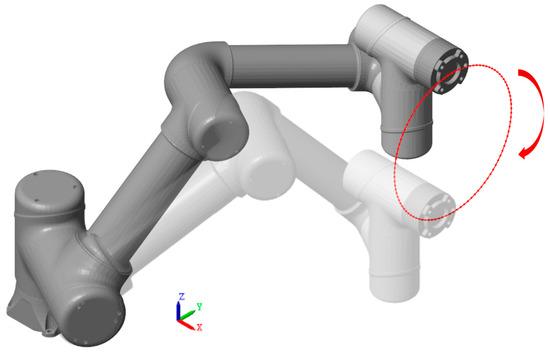
Figure 7.
Diagram of the desired trajectory.
Figure 8 shows the trajectory tracking performance of the above five control methods in Cartesian space; Figure 9 shows the error between the actual trajectory contour and the desired trajectory contour of the five control methods; and Figure 10 shows the joint position error of the 1–4 joints under the five control methods.
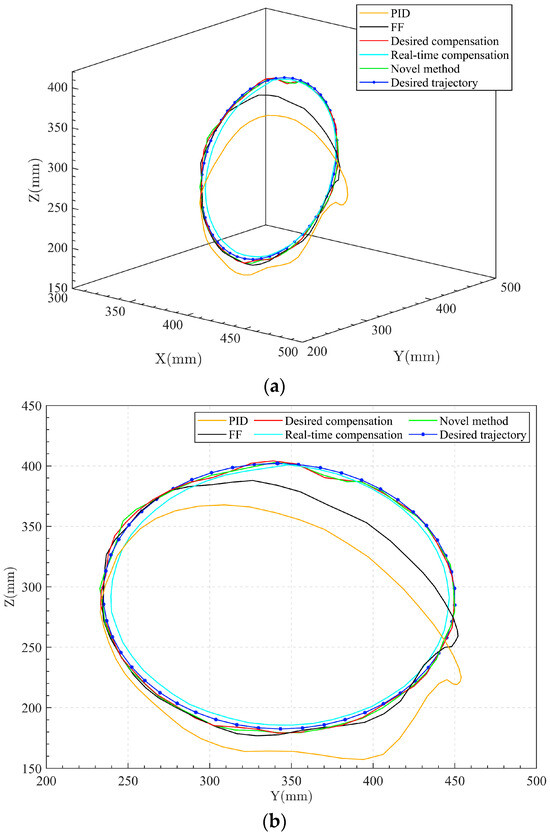
Figure 8.
Motion trajectories of end-effector under different control methods: (a) in 3D space; (b) in YZ plane.
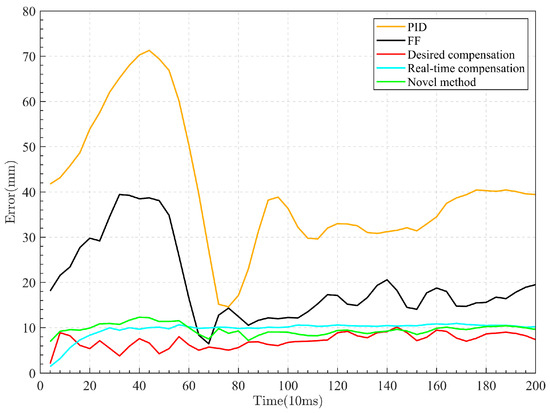
Figure 9.
Trajectory contour error of end-effector under different control methods.
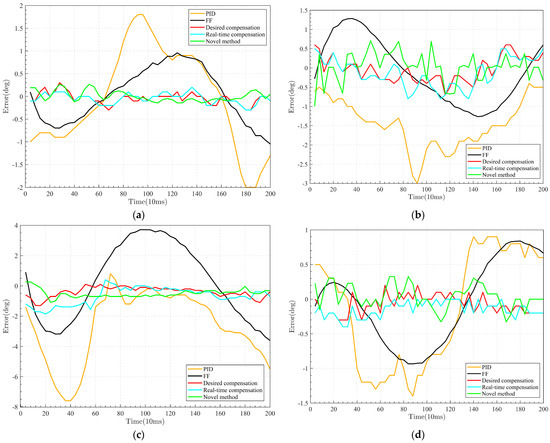
Figure 10.
Joint position error under different control methods: (a) joint 1; (b) joint 2; (c) joint 3; (d) joint 4.
The legend of each control method is illustrated as follows: PID—traditional PID control; FF—dynamics feedforward control; desired compensation—the method proposed in this article; real-time compensation—real-time robust adaptive control; and novel method—novel robust adaptive control method proposed in the literature [27].
As for the control inputs and the adaptation results of the friction coefficients, only the experimental results of the proposed method are shown in Figure 11 and Figure 12 for simplicity.
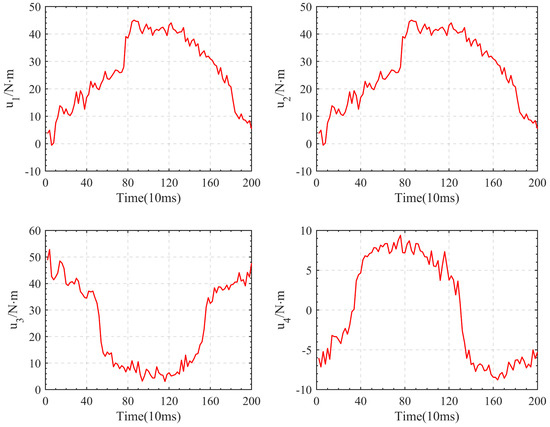
Figure 11.
Control inputs of the proposed method (joint 1~joint 4).
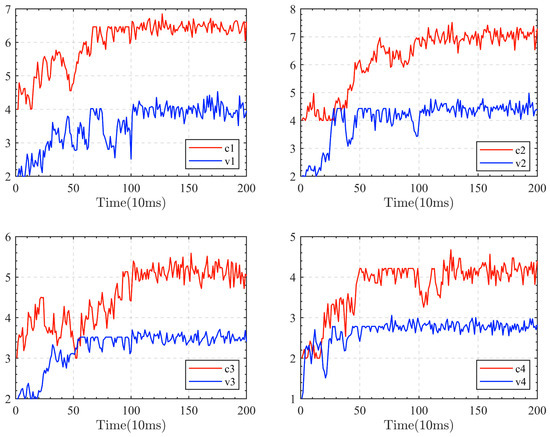
Figure 12.
The adaptation results of the friction coefficients.
4.4. Analysis and Discussion
The results of the above experiment are analyzed and discussed below. Table 3 gives the performance indices when selecting different control strategies for the trajectory tracking tasks.
Table 3.
Trajectory tracking performance.
Based on the above results, the analysis and discussion are as follows:
- The traditional PID control method does not take into consideration the dynamics of the manipulator; all the performance indices are significantly behind other control methods which consider the dynamics of the robot.
- Dynamic feedforward control directly compensates the nominal dynamic model as a feedforward quantity. Due to the uncertainties of the real dynamic model compared to our given nominal dynamic model, the performance indices under this control strategy are higher than that of PID, but there is still much room for improvement.
- The robust adaptive control method based on the desired trajectory proposed in this article considers the uncertainties in the real dynamic model, uses the corresponding control term to compensate the perturbation of the inertial parameters of the links, and corrects the friction coefficients of the joints online. Compared with the dynamic feedforward control method, all the performance indices have significant advantages.
- Compared to the real-time robust adaptive control method, which compensates for uncertainties in real time, the control method proposed in this article uses the desired trajectory to compute most of the control terms offline. In terms of the regression matrix, its dimensions are 6 × 60 for a six-degree-of-freedom manipulator with respect to its link inertial parameters, where each element is a complex nonlinear function containing the six joint state variables of the manipulator. The real-time robust adaptive control method substitutes the real-time signals measured by the sensors into the calculation to obtain the regression matrix, which is computationally intensive and requires a significant amount of processing time. Similarly, the novel robust adaptive method relies on real-time measured state variables to compute the regression matrix. On the contrast, the control method proposed in this article calculates the regression matrix offline from the a priori known desired trajectory. During the actual control process, the regression matrix at each moment is directly output by looking up the table, and then the subsequent calculation is carried out, thus eliminating the need for real-time calculation of complex regression matrix. Therefore, the control method proposed in this paper exhibits significantly lower real-time computational complexity compared to the real-time robust adaptive control and the novel robust adaptive control.
- Observing the performance indices in Table 3, under the condition that the universal manipulator used in the experiment has poor computing performance, the control strategy with desired trajectory compensation slightly outperforms the control strategy with real-time computation in terms of several performance indices. Furthermore, the method proposed in this paper still exhibits better performance when compared with the novel robust adaptive method.
5. Conclusions
Considering the requirement of real-time computation of robot dynamics and regression matrices for compensation for uncertainties in the real-time robust adaptive control method, a robust adaptive control method based on the desired trajectory is designed to compensate for uncertainties offline and reduce the real-time computation requirement. The proposed control method uses the desired trajectory to perform nominal dynamics feedforward calculation; the robust term corrects the perturbation of the inertial parameters of links; the adaptive term learns the joint friction coefficients online; and an additional compensation term is designed to meet the Lyapunov stability condition. Finally, a trajectory tracking comparison experiment is carried out on a universal manipulator, and the results show that the proposed controller has significant advantages in both control performance and real-time computational complexity.
Author Contributions
Conceptualization, Y.C. (Yu Chen 1) and Y.C. (Yu Chen 2); methodology, Y.C. (Yu Chen 1) and Y.C. (Yu Chen 2); software, Y.C. (Yu Chen 1), Y.C. (Yu Chen 2) and D.Y.; validation, Y.C. (Yu Chen 1), Y.C. (Yu Chen 2) and D.Y.; formal analysis, Y.C. (Yu Chen 1); investigation, Y.C. (Yu Chen 1); resources, Y.C. (Yu Chen 1) and J.D.; data curation, Y.C. (Yu Chen 1); writing—original draft preparation, Y.C. (Yu Chen 1); writing—review and editing, Y.C. (Yu Chen 1) and J.D.; supervision, Y.C. (Yu Chen 1), D.Y. and J.D.; project administration, Y.C. (Yu Chen 1); funding acquisition, J.D. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Key R&D Program of Hubei Province, grant number 2021AAB001.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data that support the study are available from the corresponding author, Y.C., upon reasonable request. The data are not publicly available due to privacy.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Asadi, E.; Li, B.; Chen, I.-M. Pictobot: A Cooperative Painting Robot for Interior Finishing of Industrial Developments. IEEE Robot. Autom. Mag. 2018, 25, 82–94. [Google Scholar] [CrossRef]
- Li, G.; Huang, H.; Guo, H.; Li, B. Dynamic Modeling and Control for a Deployable Grasping Manipulator. IEEE Access 2019, 7, 23000–23011. [Google Scholar] [CrossRef]
- Kachouie, R.; Sedighadeli, S.; Khosla, R.; Chu, M.-T. Socially Assistive Robots in Elderly Care: A Mixed-Method Systematic Literature Review. Int. J. Hum.–Comput. Interact. 2014, 30, 369–393. [Google Scholar] [CrossRef]
- Karnan, H.; Nair, A.; Xiao, X.; Warnell, G.; Pirk, S.; Toshev, A.; Hart, J.; Biswas, J.; Stone, P. Socially CompliAnt Navigation Dataset (SCAND): A Large-Scale Dataset of Demonstrations for Social Navigation. IEEE Robot. Autom. Lett. 2022, 7, 11807–11814. [Google Scholar] [CrossRef]
- Bettini, A.; Marayong, P.; Lang, S.; Okamura, A.M.; Hager, G.D. Vision-Assisted Control for Manipulation Using Virtual Fixtures. IEEE Trans. Robot. 2004, 20, 953–966. [Google Scholar] [CrossRef]
- Dupont, P.E.; Nelson, B.J.; Goldfarb, M.; Hannaford, B.; Menciassi, A.; O’Malley, M.K.; Simaan, N.; Valdastri, P.; Yang, G.-Z. A Decade Retrospective of Medical Robotics Research from 2010 to 2020. Sci. Robot. 2021, 6, eabi8017. [Google Scholar] [CrossRef]
- Arimoto, S. Stability and Robustness of PID Feedback Control for Robot Manipulators of Sensory Capability. In Robotics Research: First International Symposium; MIT Press: Cambridge, MA, USA, 1984. [Google Scholar]
- Kelly, R.; Santibáñez, V.; Loría, A. Control of Robot Manipulators in Joint Space; Advanced Textbooks in Control and Signal Processing; Springer: London, UK, 2005; ISBN 978-1-85233-994-4. [Google Scholar]
- Zhang, B.; Wu, J.; Wang, L.; Yu, Z.; Fu, P. A Method to Realize Accurate Dynamic Feedforward Control of a Spray-Painting Robot for Airplane Wings. IEEE ASME Trans. Mechatron. 2018, 23, 1182–1192. [Google Scholar] [CrossRef]
- Zhang, B.; Wu, J.; Wang, L.; Yu, Z. Accurate Dynamic Modeling and Control Parameters Design of an Industrial Hybrid Spray-Painting Robot. Robot. Comput.-Integr. Manuf. 2020, 63, 101923. [Google Scholar] [CrossRef]
- Rahimi, H.N.; Howard, I.; Cui, L. Neural Adaptive Tracking Control for an Uncertain Robot Manipulator with Time-Varying Joint Space Constraints. Mech. Syst. Signal Process. 2018, 112, 44–60. [Google Scholar] [CrossRef]
- Zhao, H.; Liu, W.; Chen, X.; Sun, H. Adaptive Robust Constraint-Following Control for Underactuated Unmanned Bicycle Robot with Uncertainties. ISA Trans. 2023, 143, 144–155. [Google Scholar] [CrossRef]
- Zhang, L.; Ren, X.; Zheng, D. Adaptive Uncertainty Estimator-Based Sliding Mode Control for a Spherical Robot: Methodology and Verification. J. Comput. Nonlinear Dyn. 2022, 17, 101002. [Google Scholar] [CrossRef]
- Son, J.; Kang, H.; Kang, S.H. A Review on Robust Control of Robot Manipulators for Future Manufacturing. Int. J. Precis. Eng. Manuf. 2023, 24, 1083–1102. [Google Scholar] [CrossRef]
- Kawai, Y.; Yokokura, Y.; Ohishi, K.; Shinozaki, T. Load-Side Acceleration Control Based on Load-Side Velocity Disturbance Observer for Geared Actuator. Adv. Robot. 2023, 37, 634–648. [Google Scholar] [CrossRef]
- Sage, H.G.; De Mathelin, M.F.; Ostertag, E. Robust Control of Robot Manipulators: A Survey. Int. J. Control 1999, 72, 1498–1522. [Google Scholar] [CrossRef]
- Zhen, S.; Ma, M.; Liu, X.; Chen, F.; Zhao, H.; Chen, Y.-H. Model-Based Robust Control Design and Experimental Validation of SCARA Robot System with Uncertainty. J. Vib. Control 2023, 29, 91–104. [Google Scholar] [CrossRef]
- Hu, J.; Zhang, H.; Liu, H.; Yu, X. A Survey on Sliding Mode Control for Networked Control Systems. Int. J. Syst. Sci. 2021, 52, 1129–1147. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, C.; Jia, Q.; Liu, X.; Yang, G. Robust Continuous Sliding Mode Control for Manipulator PMSM Trajectory Tracking System Under Time-Varying Uncertain Disturbances. IEEE Access 2020, 8, 196618–196632. [Google Scholar] [CrossRef]
- Muñoz-Vázquez, A.J.; Sánchez-Torres, J.D.; Jiménez-Rodríguez, E.; Loukianov, A.G. Predefined-Time Robust Stabilization of Robotic Manipulators. IEEE ASME Trans. Mechatron. 2019, 24, 1033–1040. [Google Scholar] [CrossRef]
- Fridman, L.M. An Averaging Approach to Chattering. IEEE Trans. Autom. Control 2001, 46, 1260–1265. [Google Scholar] [CrossRef]
- Burton, J.A.; Zinober, A.S.I. Continuous Approximation of Variable Structure Control. Int. J. Syst. Sci. 1986, 17, 875–885. [Google Scholar] [CrossRef]
- Yeh, Y.-L. A Robust Noise-Free Linear Control Design for Robot Manipulator with Uncertain System Parameters. Actuators 2021, 10, 121. [Google Scholar] [CrossRef]
- Wang, H. Adaptive Control of Robot Manipulators With Uncertain Kinematics and Dynamics. IEEE Trans. Autom. Control 2017, 62, 948–954. [Google Scholar] [CrossRef]
- Liu, Y.-J.; Lu, S.; Tong, S.; Chen, X.; Chen, C.L.P.; Li, D.-J. Adaptive Control-Based Barrier Lyapunov Functions for a Class of Stochastic Nonlinear Systems with Full State Constraints. Automatica 2018, 87, 83–93. [Google Scholar] [CrossRef]
- Zhen, S.; Zhang, M.; Liu, X.; Chen, Y.-H. Model-Based Robust Control Design and Experimental Validation of Collaborative Industrial Robot System with Uncertainty. Asian J. Control 2023, 25, 1663–1674. [Google Scholar] [CrossRef]
- Arteaga-Perez, M.A.; Pliego-Jimenez, J.; Romero, J.G. Experimental Results on the Robust and Adaptive Control of Robot Manipulators without Velocity Measurements. IEEE Trans. Contr. Syst. Technol. 2020, 28, 2770–2773. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Yazdanpanah, M.J. Performance Enhanced Model Reference Adaptive Control through Switching Non-Quadratic Lyapunov Functions. Syst. Control Lett. 2015, 76, 47–55. [Google Scholar] [CrossRef]
- Tao, G. Model Reference Adaptive Control with L1+α Tracking. Int. J. Control 1996, 64, 859–870. [Google Scholar] [CrossRef]
- Zhang, D.; Wei, B. A Review on Model Reference Adaptive Control of Robotic Manipulators. Annu. Rev. Control 2017, 43, 188–198. [Google Scholar] [CrossRef]
- Tian, G.; Duan, G. Robust Model Reference Tracking for Uncertain Second-Order Nonlinear Systems with Application to Robot Manipulator. Int. J. Robust Nonlinear Control 2023, 33, 1750–1771. [Google Scholar] [CrossRef]
- Peláez, G.; Alonso, C.; Rubio, H.; García-Prada, J.C. Performance Analysis of Input Shaped Model Reference Adaptive Control for a Single-Link Flexible Manipulator. J. Vib. Control 2023, 1–13. [Google Scholar] [CrossRef]
- Chopra, N.; Fujita, M.; Ortega, R.; Spong, M.W. Passivity-Based Control of Robots: Theory and Examples from the Literature. IEEE Control Syst. 2022, 42, 63–73. [Google Scholar] [CrossRef]
- Sadegh, N.; Horowitz, R. Stability and Robustness Analysis of a Class of Adaptive Controllers for Robotic Manipulators. Int. J. Robot. Res. 1990, 9, 74–92. [Google Scholar] [CrossRef]
- Open Source 6-Axis Collaborative Robot—Hefei Zhongke Shengu Science & Technology Development Co. Available online: https://www.vstc.cc/display.php?id=650 (accessed on 25 February 2024).
- Semi-Physical Simulation and Control Technology—Common Technology R&D Center. Available online: https://www.vstc.cc/list.php?class_id=103105101 (accessed on 25 February 2024).
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).