
Digital-Twin-Based System for Foam Cleaning Robots in Spent Fuel Pools

Abstract
1. Introduction
2. Digital Twin Technology Architecture for Surface Robots
2.1. Physical Entity Layer (PEL)
2.2. Twin Data Layer (TWL)
2.3. Twin Model Layer (TML)
2.4. Application Service Layer (ASL)
3. Implementation of the Digital Twin System for the Foam Cleaning Robot in Spent Fuel Pools
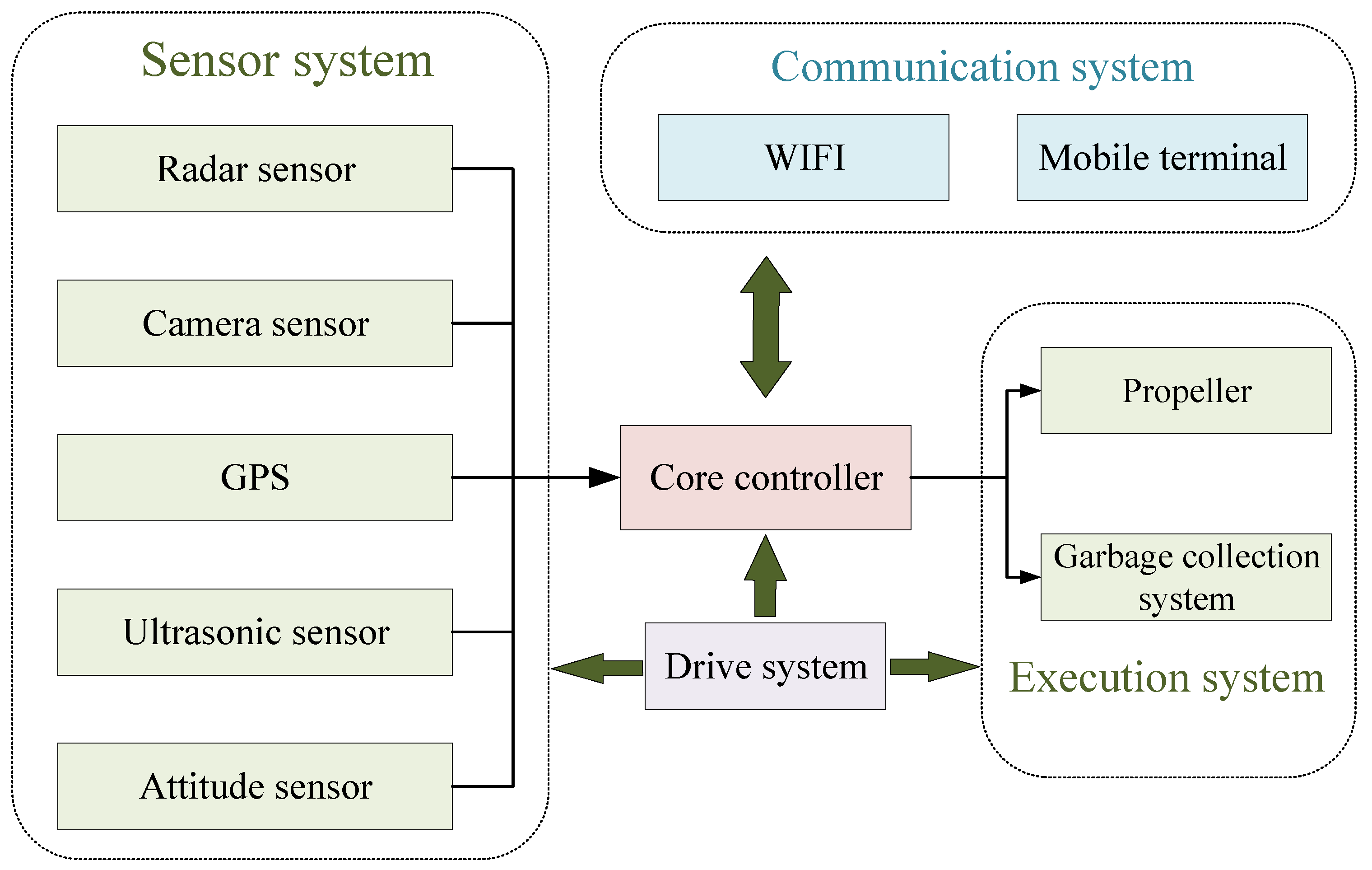
3.1. Establishment of the Physical Model for Robots
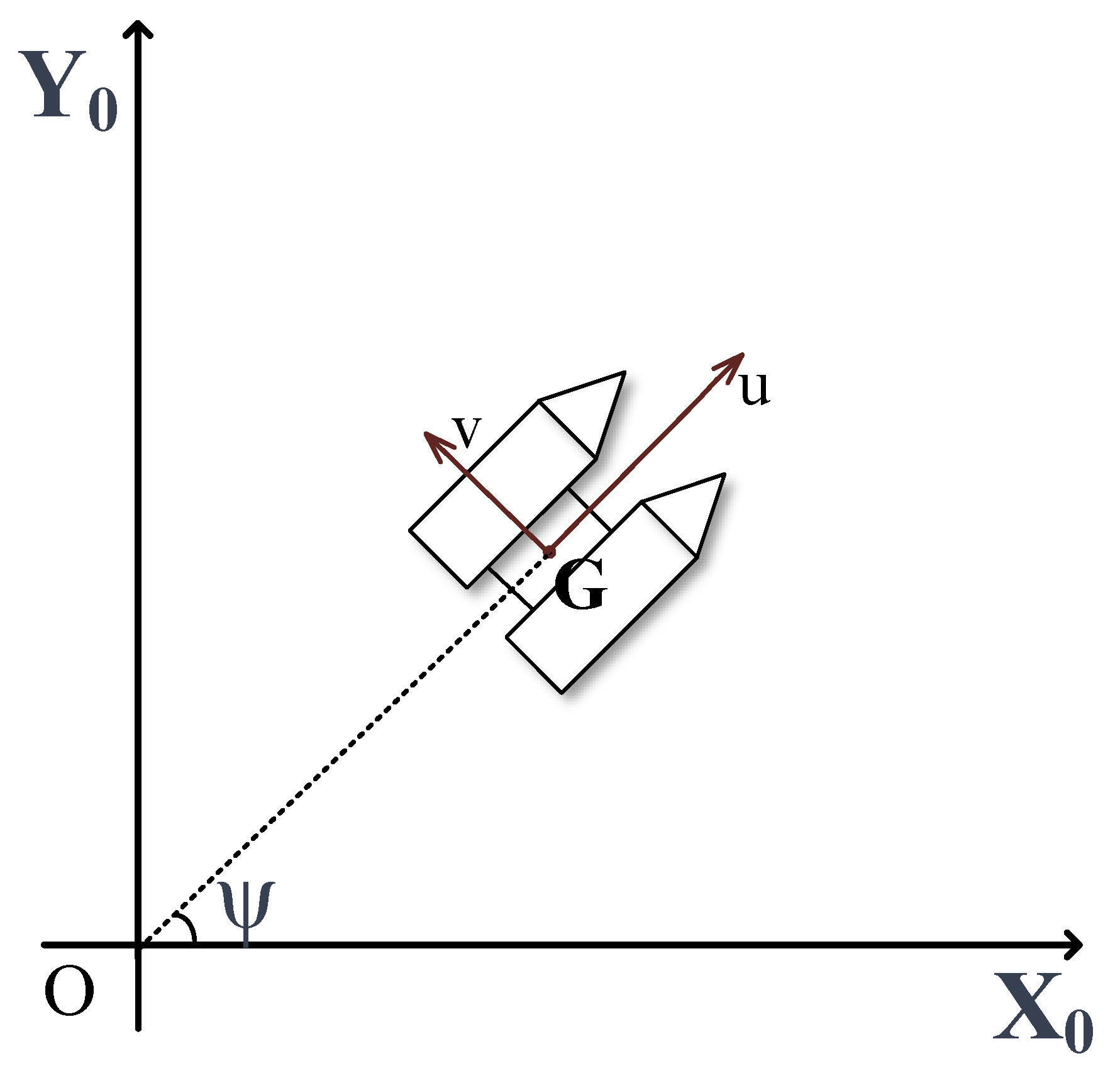
3.2. Establishment of the Robot Motion Model
3.3. Construction of the Working Scenario for the Cleaning Robot
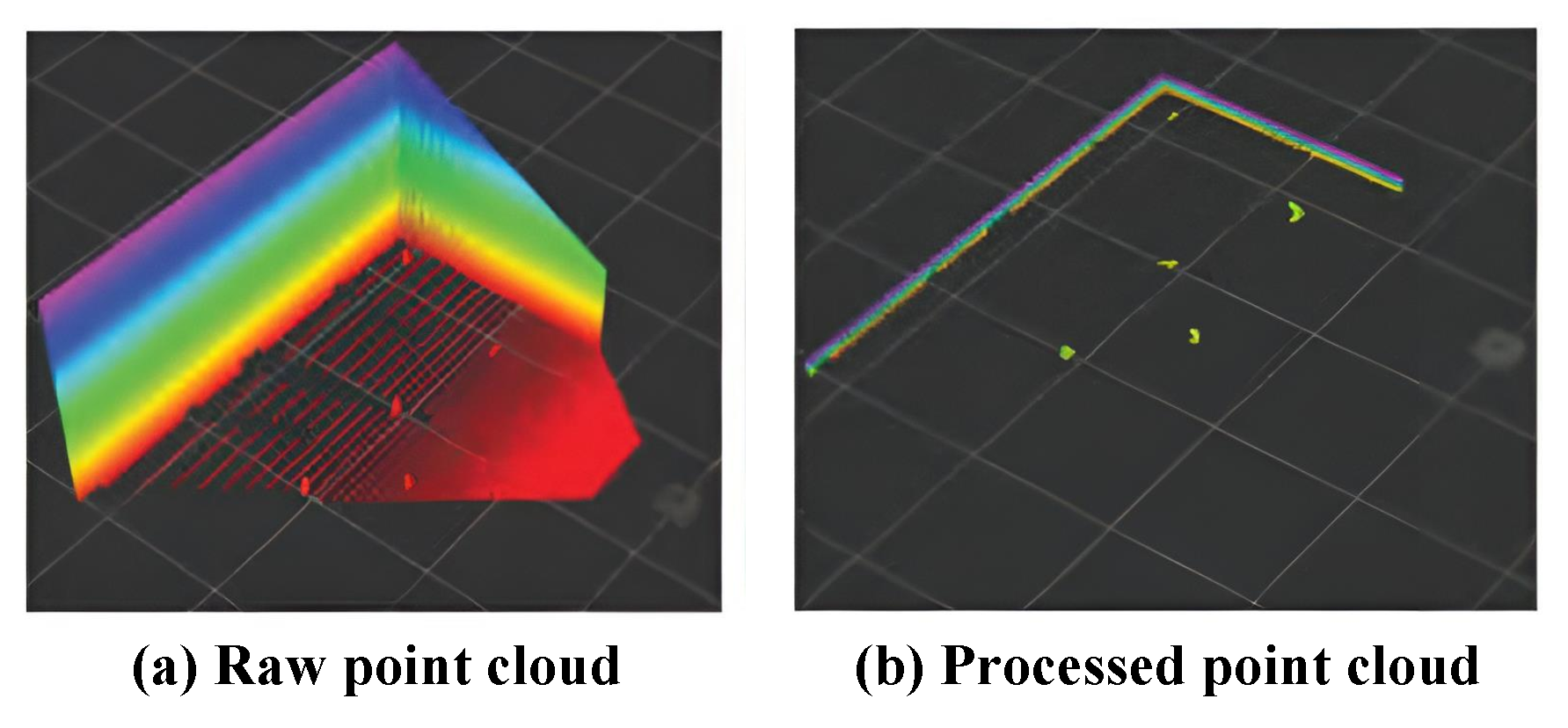
3.3.1. Processing of Depth Camera Point Clouds
3.3.2. Sensor Data Fusion
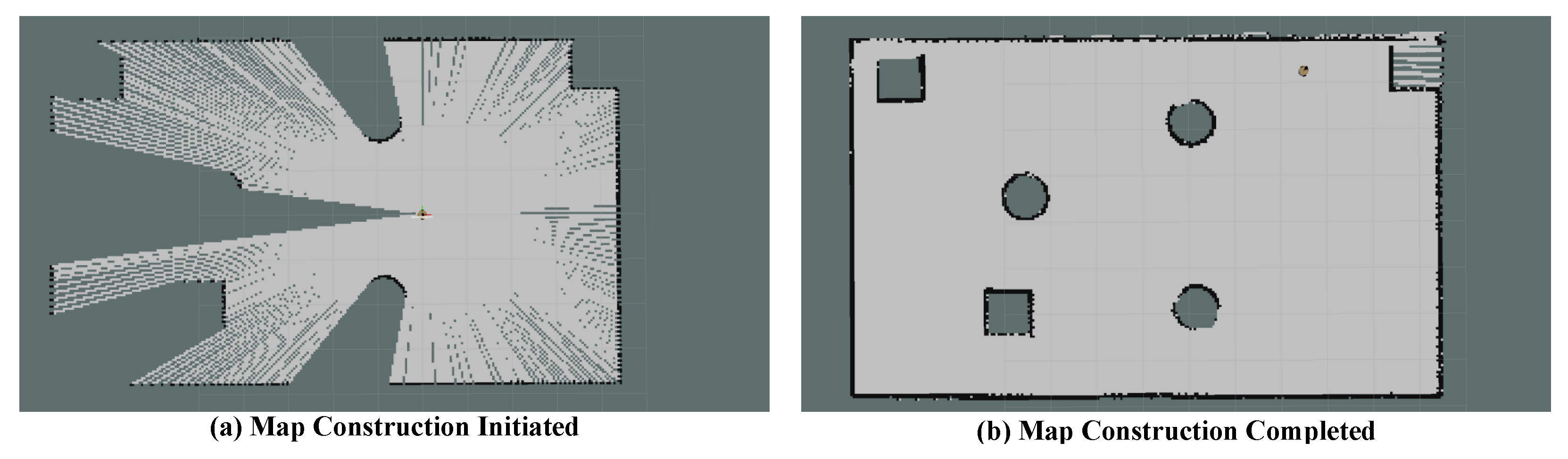
3.3.3. Construction of the Scene Map
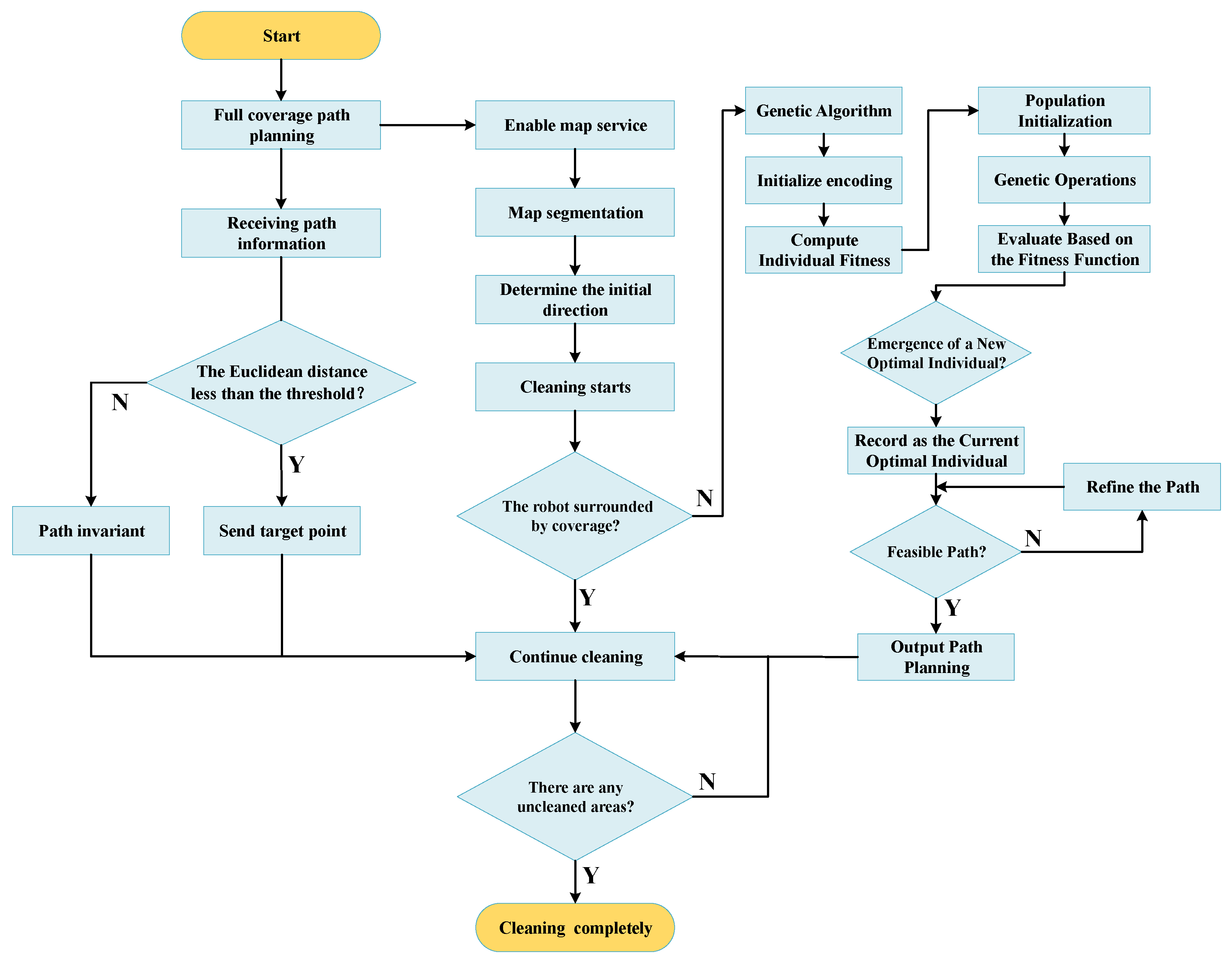
4. Digital Twin Collaborative Full-Coverage Path Planning Method
4.1. Construction of the Objective Function
4.2. Selection and Improvement of the Full-Coverage Path Planning Algorithm
5. Obstacle Detection and Localization
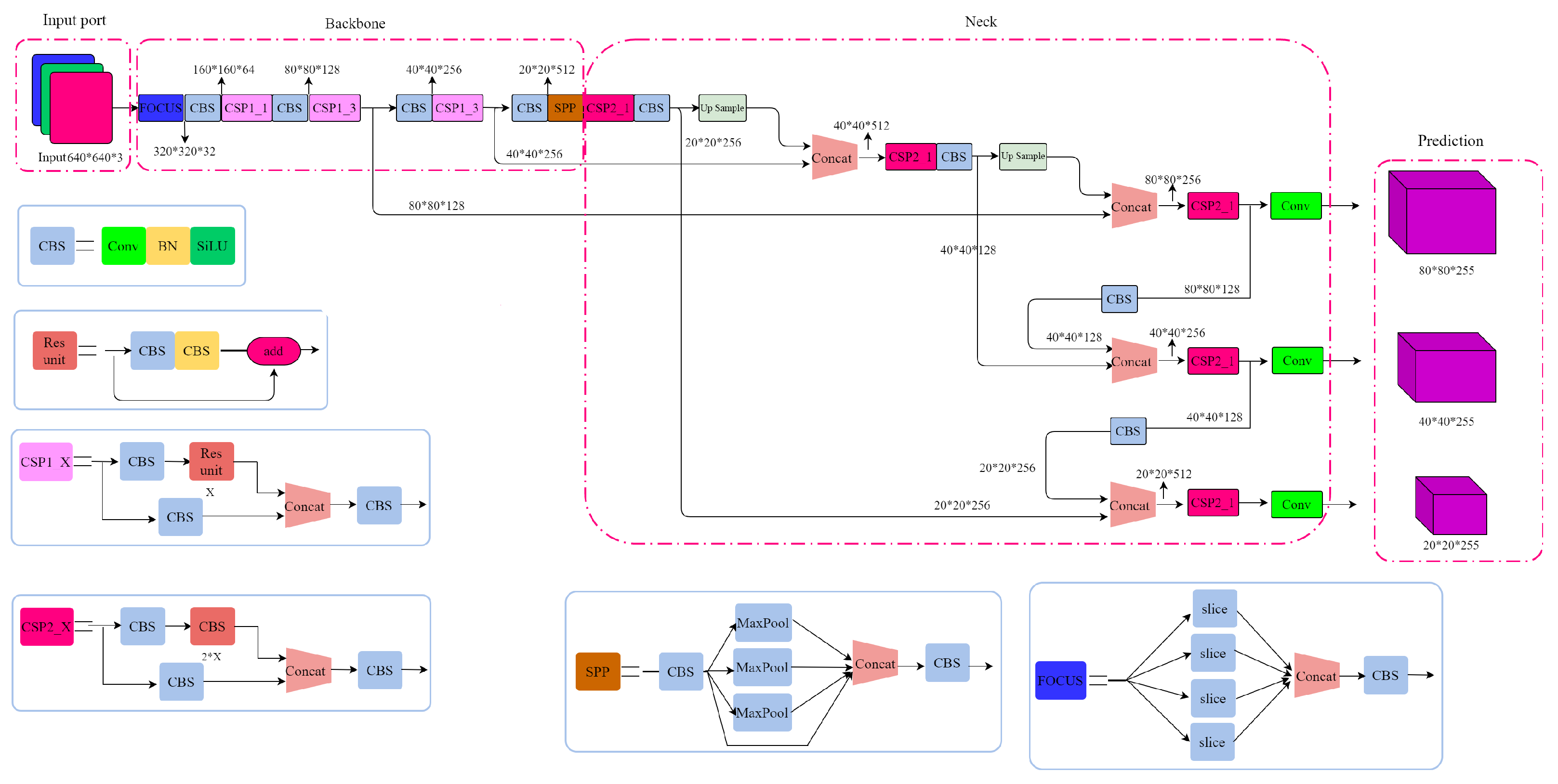
5.1. Object Detection Based on YOLOv5
5.2. Obstacle Coordinate Localization
5.3. Obstacle Avoidance Operations
6. Experimental Validation and Analysis
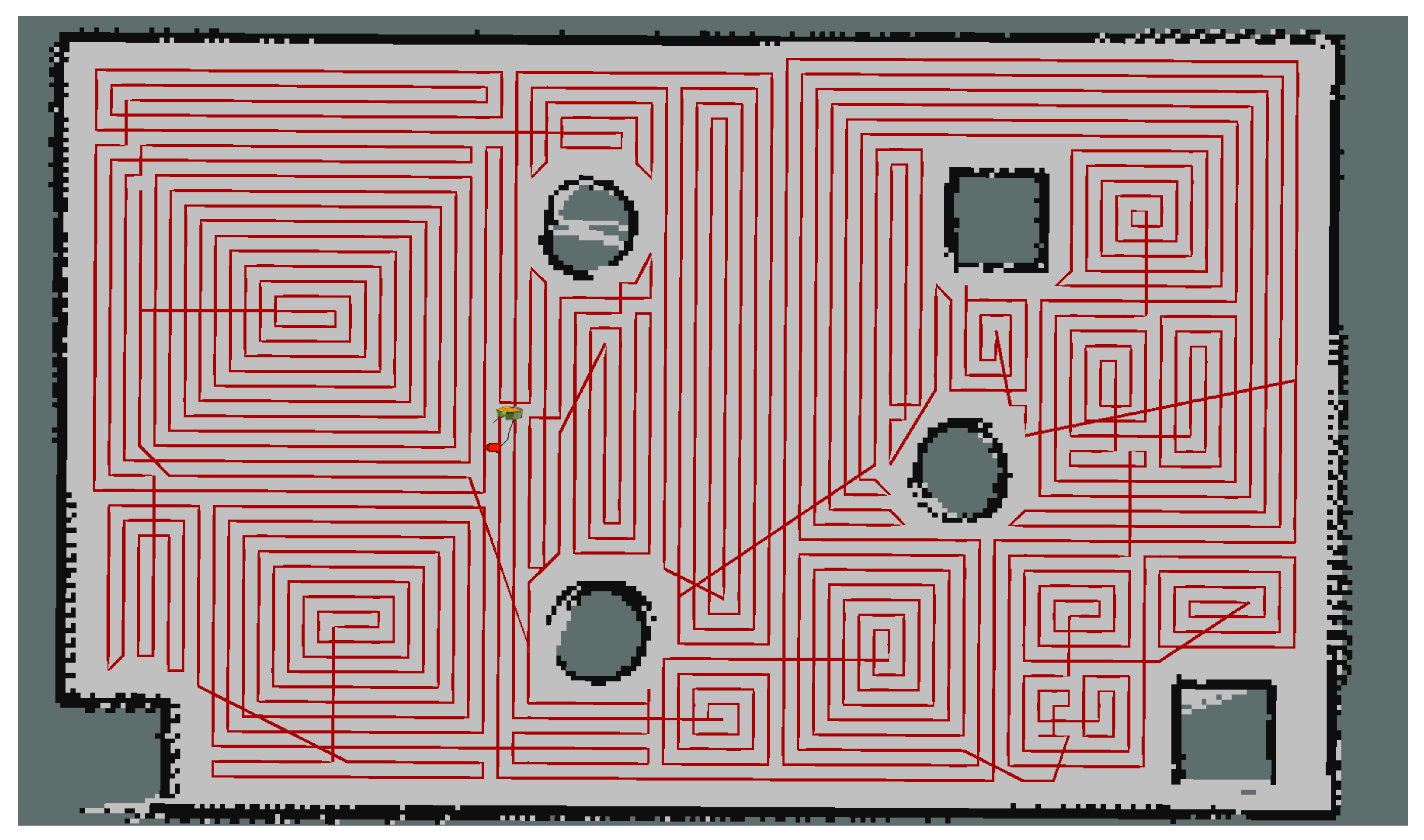
6.1. Comparative Evaluation of the Performance of the Improved Full-Coverage Path Planning Method
6.2. Digital Twin Robot Monitoring Synchronization Experiment
6.3. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bajic, B.; Rikalovic, A.; Suzic, N.; Piuri, V. Industry 4.0 Implementation Challenges and Opportunities: A Managerial Perspective. IEEE Syst. J. 2021, 15, 546–559. [Google Scholar] [CrossRef]
- Huang, C.P.; Wu, J.Y.; Li, Y.J. Treatment of spent nuclear fuel debris contaminated water in the Taiwan Research Reactor spent fuel pool. Prog. Nucl. Energy 2018, 108, 26–33. [Google Scholar] [CrossRef]
- Fedorovich, E.D.; Karyakin, Y.E.; Mikhailov, V.E.; Astafieva, V.O.; Pletnev, A.A. Modeling of heatmasstransfer in “wet” and “dry” storages for spent nuclear fuel. In Proceedings of the Asme International Heat Transfer Conference—2010, Vol 7: Natural Convection, Natural/Mixed Convection, Nuclear, Phase Change Materials, Solar, Washington, DC, USA, 8–13 August 2010; pp. 303–310. [Google Scholar]
- Glaessgen, E.; Stargel, D. The Digital Twin Paradigm for Future NASA and U.S. Air Force Vehicles. In Proceedings of the 53rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference 20th AIAA/ASME/AHS Adaptive Structures Conference 14th AIAA, Honolulu, HI, USA, 23–26 April 2012. [Google Scholar]
- Tao, F.; Liu, W.; Zhang, M.; Hu, T.L.; Qi, Q.; Zhang, H.; Sui, F.; Wang, T.; Xu, T.; Huang, Z.; et al. Five-dimension digital twin model and its ten applications. Comput. Integr. Manuf. Syst. 2019, 25, 1–18. [Google Scholar]
- Fei, T.; Chenyuan, Z.; Qinglin, Q.; He, Z. Digital twin maturity model. Comput. Integr. Manuf. Syst. 2022, 28, 1–20. [Google Scholar]
- Tao, F.; Zhang, H.; Qi, Q.L.; Zhang, M.; Liu, W.R.; Cheng, J.F. Ten questions towards digital twin: Analysis and thinking. Comput. Integr. Manuf. Syst. 2020, 26, 1–17. [Google Scholar]
- Hao, L.; Haoqi, W.; Gen, L.; Junling, W.; Evans, S.; Linli, L.; Xiaocong, W.; Zhang, S.; Xiaoyu, W.; Fuquan, N.; et al. Concept, system structure and operating mode of industrial digital twin system. Comput. Integr. Manuf. Syst. 2021, 27, 3373–3390. [Google Scholar]
- Wang, Y.; Wei, Y.; Liu, G. Gear Box Operation Condition Evaluation Based on Digital Twin. Modul. Mach. Tool Autom. Manuf. Tech. 2022, 7, 48–51. [Google Scholar]
- Söderberg, R.; Wärmefjord, K.; Carlson, J.S.; Lindkvist, L. Toward a Digital Twin for real-time geometry assurance in individualized production. Cirp Ann. -Manuf. Technol. 2017, 66, 137–140. [Google Scholar] [CrossRef]
- Wei, Y.; Guo, L.; Chen, L.; Zhang, H.; Hu, X.; Zhou, H.; Li, G. Research and implementation of digital twin workshop based on rea-time data driven. Comput. Integr. Manuf. Syst. 2021, 27, 352–363. [Google Scholar]
- Mo, Y.; Ma, S.; Gong, H.; Chen, Z.; Zhang, J.; Tao, D. Terra: A smart and sensible digital twin framework for robust robot deployment in challenging environments. IEEE Internet Things J. 2021, 8, 14039–14050. [Google Scholar] [CrossRef]
- Stan, L.; Nicolescu, A.F.; Pupăză, C.; Jiga, G. Digital Twin and web services for robotic deburring in intelligent manufacturing. J. Intell. Manuf. 2022, 34, 2765–2781. [Google Scholar] [CrossRef] [PubMed]
- Wei, X.; Li, W.; Guo, Z.; Liu, B.; Wang, J.; Wang, T. Digital twin robot and its motion control for surface cleaning of carbon block. Comput. Integr. Manuf. Syst. 2023, 29, 1950. [Google Scholar]
- Chancharoen, R.; Chaiprabha, K.; Wuttisittikulkij, L.; Asdornwised, W.; Saadi, M.; Phanomchoeng, G. Digital twin for a collaborative painting robot. Sensors 2022, 23, 17. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Z.; Lin, Z.; Huang, J.; Zheng, L.; He, B. A digital twin-based machining motion simulation and visualization monitoring system for milling robot. Int. J. Adv. Manuf. Technol. 2023, 127, 4387–4399. [Google Scholar] [CrossRef]
- Farhadi, A.; Lee, S.K.; Hinchy, E.P.; O’Dowd, N.P.; McCarthy, C.T. The development of a digital twin framework for an industrial robotic drilling process. Sensors 2022, 22, 7232. [Google Scholar] [CrossRef] [PubMed]
- Liu, F.; Liang, C. Opportunities and challenges of digital twin. Ind. Innov. 2023; 18, 13–15. [Google Scholar]
- Yasukawa, H.; Yoshimura, Y. Introduction of MMG standard method for ship maneuvering predictions. J. Mar. Sci. Technol. 2015, 20, 37–52. [Google Scholar] [CrossRef]
- Nardi, F.; Lazaro, M.T.; Iocchi, L.; Grisetti, G. Generation of Laser-Quality 2D Navigation Maps from RGB-D Sensors. In Proceedings of the Robot World Cup Xxii, Robocup 2018, Montreal, QC, Canada, June 2018; Holz, D., Genter, K., Saad, M., VonStryk, O., Eds.; Lecture Notes in Artificial Intelligence. Springer: Berlin/Heidelberg, Germany, 2019; Volume 11374, pp. 238–250. [Google Scholar] [CrossRef]
- Hess, W.; Kohler, D.; Rapp, H.; Andor, D. Real-time loop closure in 2D LIDAR SLAM. In Proceedings of the 2016 IEEE international conference on robotics and automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1271–1278. [Google Scholar]
- Lamini, C.; Benhlima, S.; Elbekri, A. Genetic Algorithm Based Approach for Autonomous Mobile Robot Path Planning. Procedia Comput. Sci. 2018, 127, 180–189. [Google Scholar] [CrossRef]
- Bakdi, A.; Hentout, A.; Boutami, H.; Maoudj, A.; Hachour, O.; Bouzouia, B. Optimal path planning and execution for mobile robots using genetic algorithm and adaptive fuzzy-logic control. Robot. Auton. Syst. 2016, 89, 95–109. [Google Scholar] [CrossRef]
- Sun, X.; Chai, S.; Zhang, B. Trajectory Planning of the Unmanned Aerial Vehicles with Adaptive Convex Optimization Method. IFAC Pap. 2019, 52, 67–72. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | Assembly Unit | Amount |
|---|---|---|
| ① | Ultrasonic sensor | 4 |
| ② | depth camera | 1 |
| ③ | lidar | 1 |
| ④ | blow-off line | 1 |
| ⑤ | storage box | 1 |
| ⑥ | electrical machinery | 2 |
| Type of Clearance | Original Algorithm | Improved Algorithm with Digital Twin Collaboration |
|---|---|---|
| Motion Time/s | 942 | 926 |
| Hover Time/s | 244 | 43 |
| Total Time /s | 1186 | 969 |
| Path length/m | 73.26 | 72.35 |
| Site coverage% | 100 | 100 |
| Power consumption/J | 155,053.26 | 128,826.15 |
| Time Point/s | The Physical Robot’s Position Coordinates and Motion Direction | The Virtual Robot’s Position Coordinates and Motion Direction | Margin of Error% | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Horizontal/m | Vertical/m | Angle/(°) | Horizontal/m | Vertical/m | Angle/(°) | Horizontal | Vertical | Angle | |
| t1 = 200 | 3.262 | 4.266 | 24.63 | 3.266 | 4.263 | 24.59 | 0.122 | −0.070 | −0.162 |
| t2 = 500 | 6.371 | 6.537 | −86.18 | 6.371 | 6.531 | −86.29 | 0 | −0.092 | 0.128 |
| t3 = 800 | 8.116 | 2.485 | 133.26 | 8.120 | 2.485 | 133.13 | 0.049 | 0 | −0.098 |
| t4 = 1100 | 11.482 | 7.774 | 73.89 | 11.486 | 7.779 | 73.96 | 0.035 | 0.064 | 0.095 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Chen, F.; Zhou, W. Digital-Twin-Based System for Foam Cleaning Robots in Spent Fuel Pools. Appl. Sci. 2024, 14, 2020. https://doi.org/10.3390/app14052020
Li M, Chen F, Zhou W. Digital-Twin-Based System for Foam Cleaning Robots in Spent Fuel Pools. Applied Sciences. 2024; 14(5):2020. https://doi.org/10.3390/app14052020
Chicago/Turabian StyleLi, Manhua, Fubin Chen, and Wuyun Zhou. 2024. "Digital-Twin-Based System for Foam Cleaning Robots in Spent Fuel Pools" Applied Sciences 14, no. 5: 2020. https://doi.org/10.3390/app14052020
APA StyleLi, M., Chen, F., & Zhou, W. (2024). Digital-Twin-Based System for Foam Cleaning Robots in Spent Fuel Pools. Applied Sciences, 14(5), 2020. https://doi.org/10.3390/app14052020