
A Multi-Agent Driving-Simulation Approach for Characterizing Hazardous Vehicle Interactions between Autonomous Vehicles and Manual Vehicles


Abstract
:1. Introduction
2. Literature Review
2.1. Interaction between AVs and MVs in Mixed Traffic Flow Crash Potential Index
2.2. Driving Safety by Road Alignments
2.3. Research Opportunities
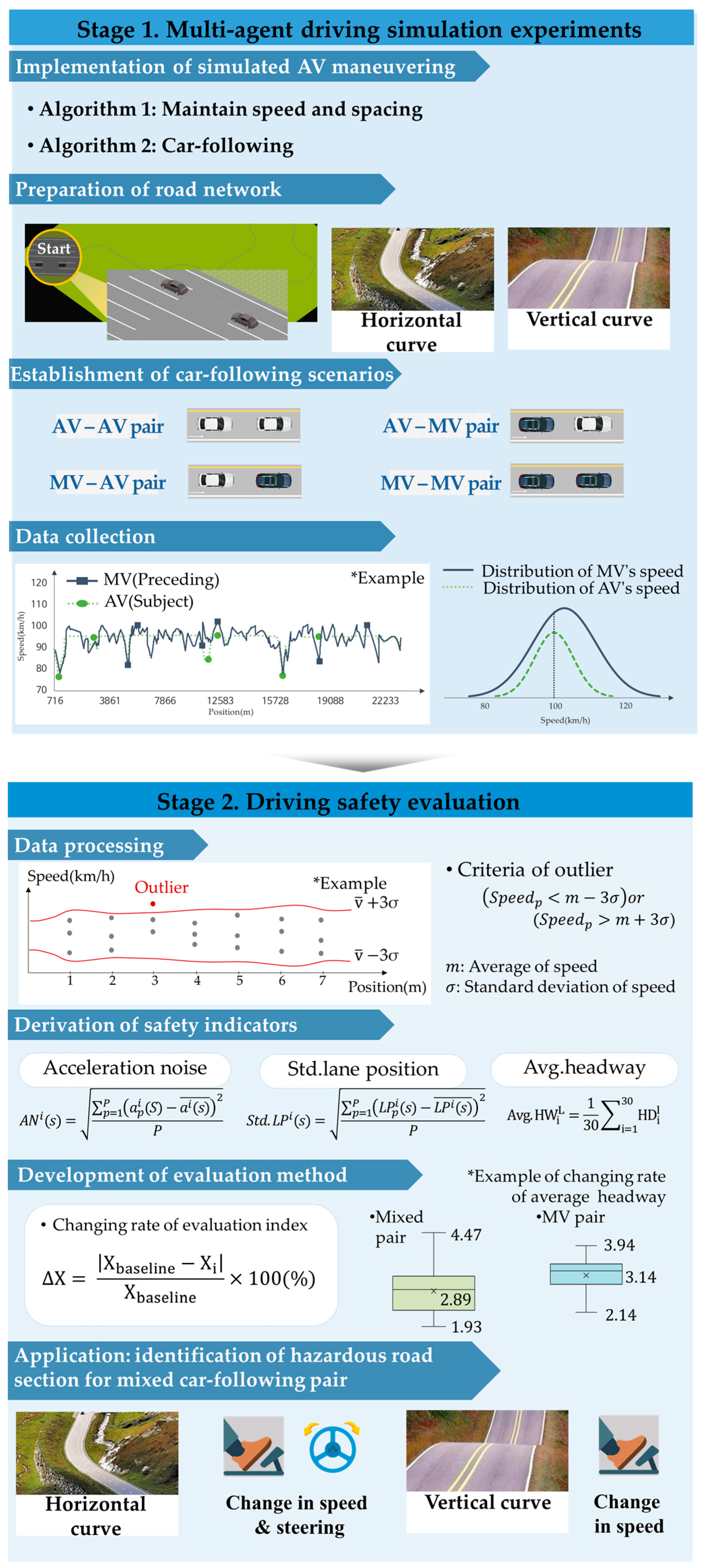
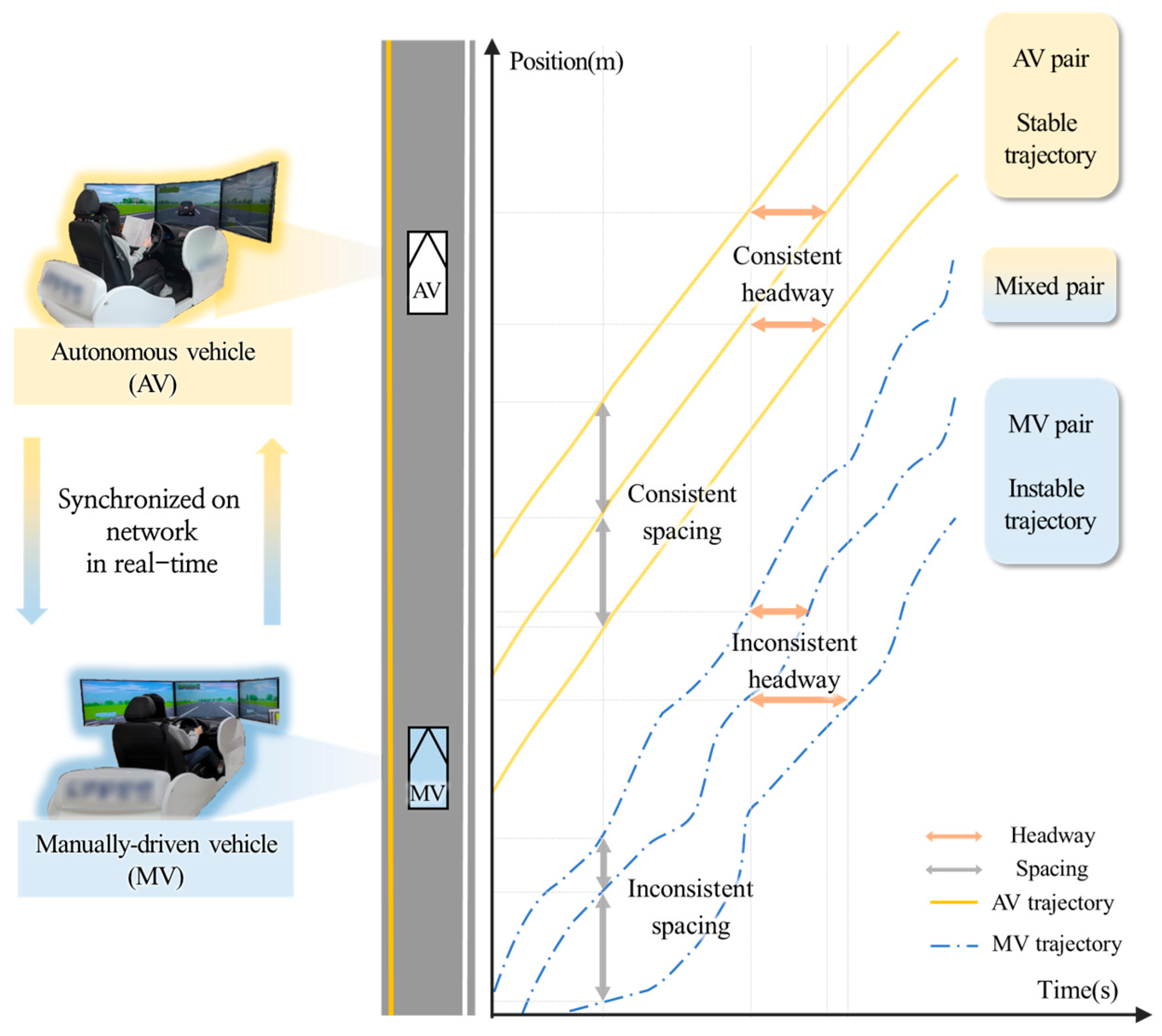
3. Methodology
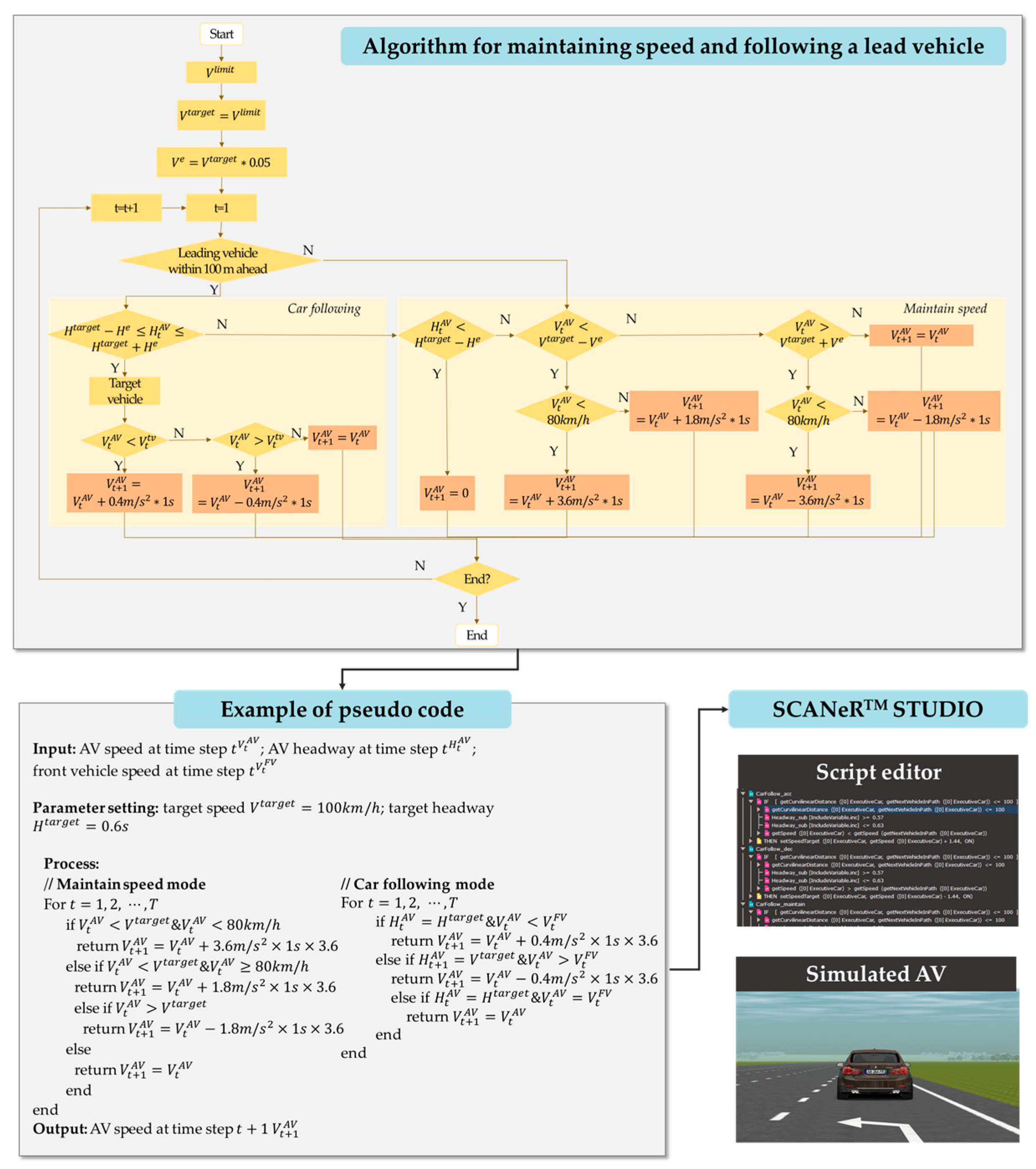
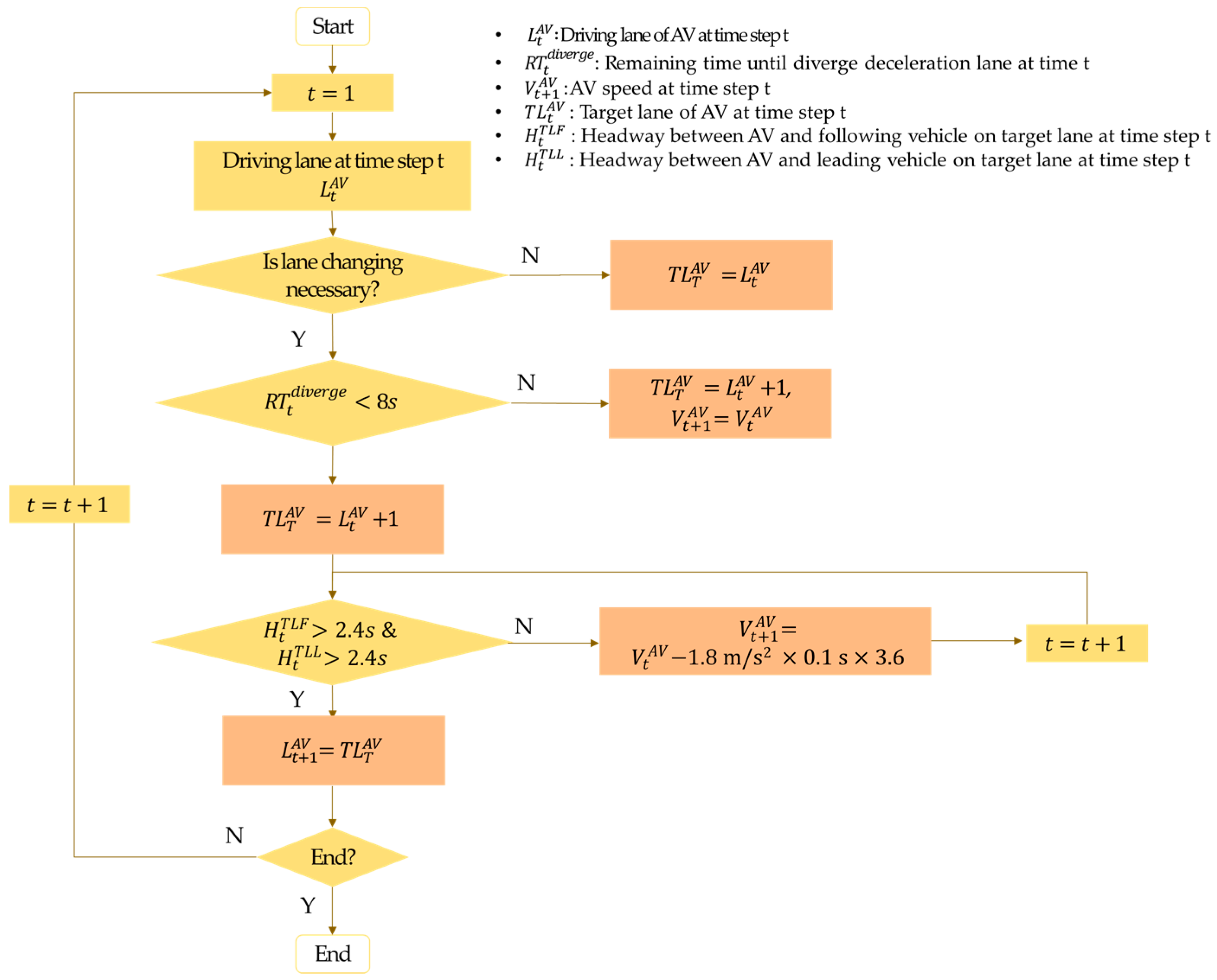
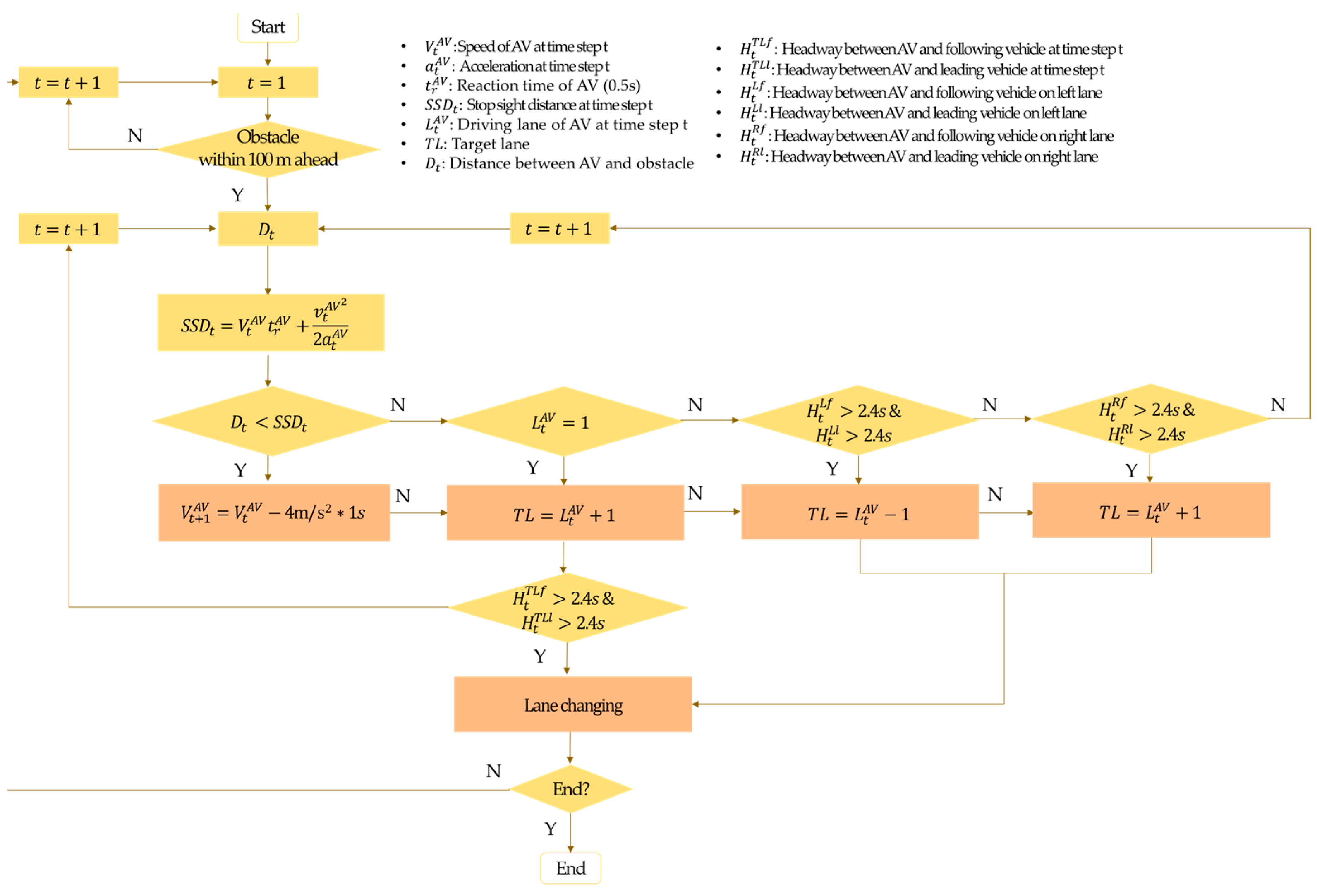
3.1. Simulation of AV Maneuvering
3.2. Driving Simulation
3.3. Data Analysis
4. Results
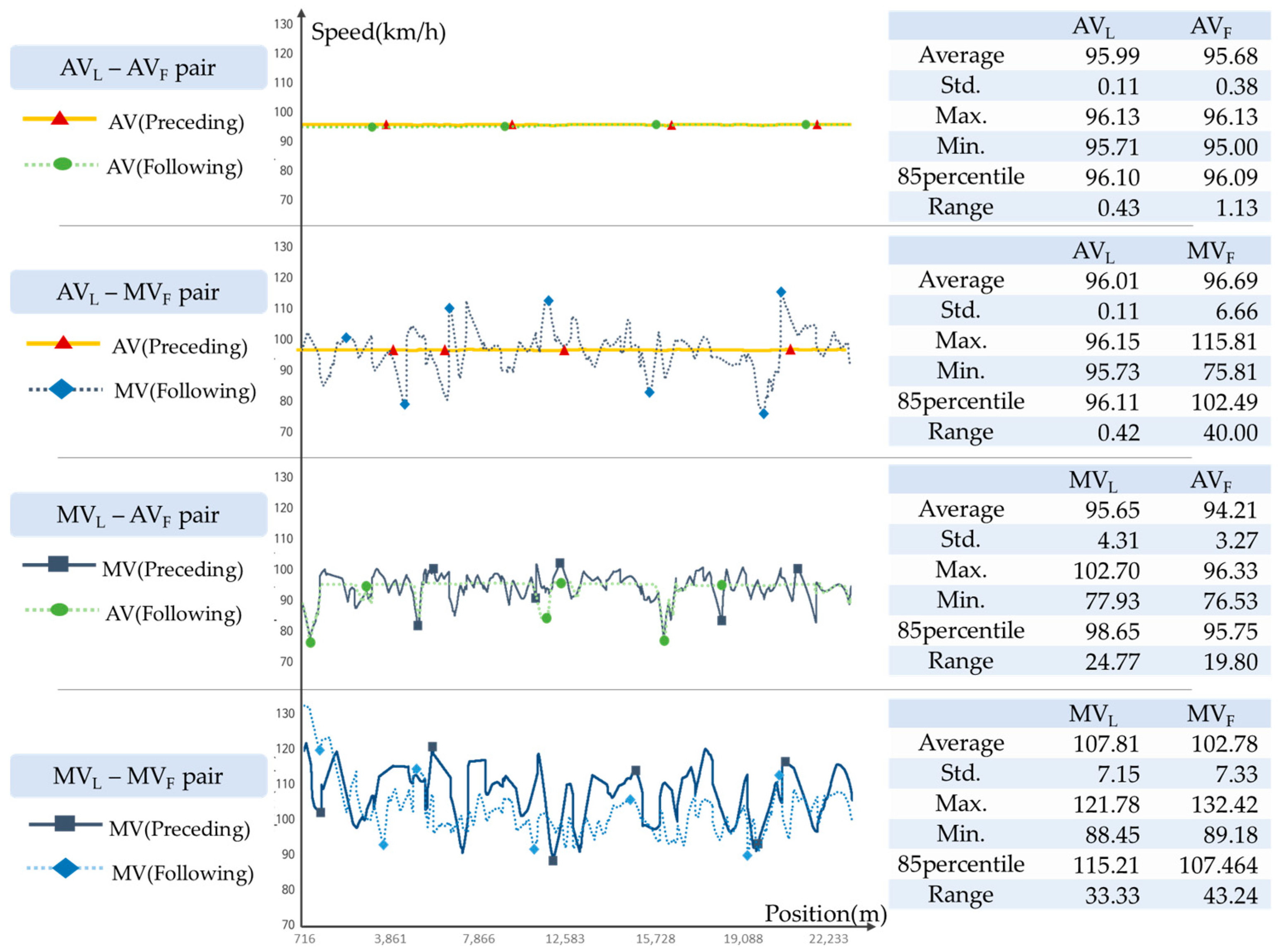
4.1. Analysis of Speed Profiles by Vehicle Pair
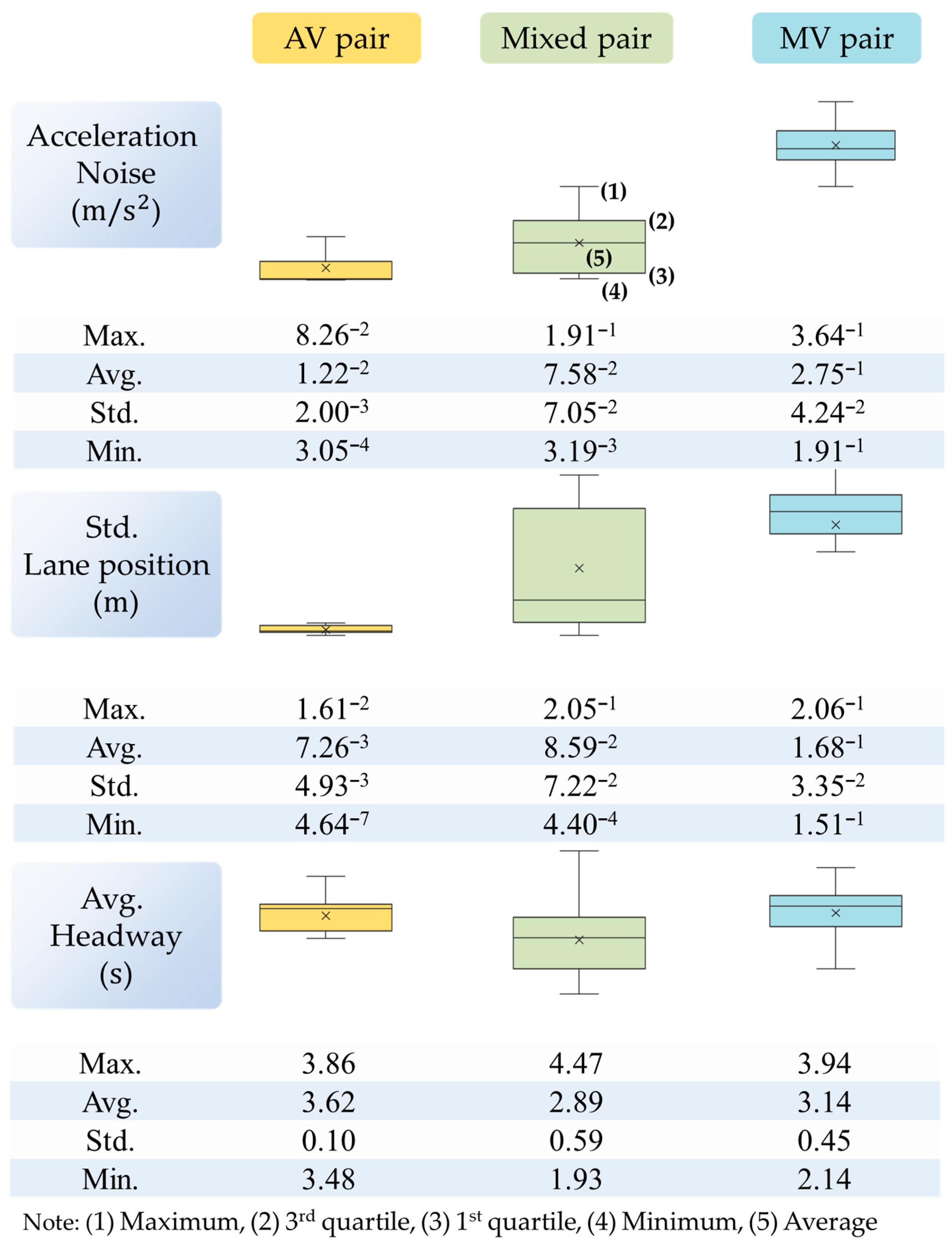
4.2. Driving Safety Evaluation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Korea Expressway Corporation. Korea’s Freeway Crash Database; Korea Expressway Corporation: Gimcheon-si, Republic of Korea, 2020. [Google Scholar]
- Liu, Q.; Wang, X.; Wu, X.; Glasser, Y.; He, L. Crash comparison of autonomous and conventional vehicles using pre-crash scenario typology. Accid. Anal. Prev. 2021, 159, 106281. [Google Scholar] [CrossRef]
- Wang, L.; Zhong, H.; Ma, W.; Abdel-Aty, M.; Park, J. How many crashes can connected vehicle and automated vehicle technologies prevent: A meta-analysis. Accid. Anal. Prev. 2020, 136, 105299. [Google Scholar] [CrossRef]
- Jeong, H.; Liu, Y. Horizontal Curve Driving Performance and Safety Affected by Road Geometry and Lead Vehicle. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting; SAGE Publications: Los Angeles, CA, USA, 2017; Volume 61, pp. 1629–1633. [Google Scholar] [CrossRef]
- Eftekharzadeh, S.F.; Khodabakhshi, A. Safety Evaluation of Highway Geometric Design Criteria in Horizontal Curves at Downgrades. Int. J. Civ. Eng. 2014, 12, 326–332. [Google Scholar]
- Lee, S.; Jeong, E.; Oh, M.; Oh, C. Driving aggressiveness management policy to enhance the performance of mixed traffic conditions in automated driving environment. Transp. Res. Part A Policy Pract. 2019, 121, 136–146. [Google Scholar] [CrossRef]
- Yao, Z.; Hu, R.; Jiang, Y.; Xu, T. Stability and safety evaluation of mixed traffic flow with connected automated vehicles on expressways. J. Saf. Res. 2020, 75, 262–274. [Google Scholar] [CrossRef]
- Guériau, M.; Dusparic, I. Quantifying the impact of connected and autonomous vehicles on traffic efficiency and safety in mixed traffic. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Mousavi, S.M.; Osman, O.A.; Lord, D.; Dixon, K.K.; Dadashova, B. Investigating the safety and operational benefits of mixed traffic environments with different automated vehicle market penetration rates in the proximity of a driveway on an urban arterial. Accid. Anal. Prev. 2021, 152, 105982. [Google Scholar] [CrossRef] [PubMed]
- Hou, G. Evaluating Efficiency and Safety of Mixed Traffic with Connected and Autonomous Vehicles in Adverse Weather. Sustainability 2023, 15, 3138. [Google Scholar] [CrossRef]
- Mahdinia, I.; Mohammadnazar, A.; Arvin, R.; Khattak, A.J. Integration of automated vehicles in mixed traffic: Evaluating changes in performance of following human-driven vehicles. Accid. Anal. Prev. 2021, 152, 106006. [Google Scholar] [CrossRef]
- Park, S.; Ritchie, S.G. Exploring the relationship between freeway speed variance, lane changing and vehicle heterogeneity. In Proceedings of the 83rd Annual Meeting of Transportation Research Board, Washington, DC, USA, 11–15 January 2004. [Google Scholar]
- Gouy, M.; Wiedemann, K.; Stevens, A.; Brunett, G.; Reed, N. Driving next to automated vehicle platoons: How do short time headways influence non-platoon drivers’ longitudinal control? Transp. Res. Part F Traffic Psychol. Behav. 2014, 27, 264–273. [Google Scholar] [CrossRef]
- Findley, D.J.; Hummer, J.E.; Zegeer, C.V.; Fowler, T.J. Modeling the Impact of Spatial Relationships on Horizontal Curve safety. Accid. Anal. Prev. 2012, 45, 296–304. [Google Scholar] [CrossRef]
- Jung, A.; Cho, E.; Jang, J.; Oh, C. Evaluation of Road Design Elements Affecting Lateral Driving Safety under High-Speed Driving Conditions. Int. J. Highw. Eng. 2021, 23, 69–79. [Google Scholar] [CrossRef]
- Bauer, K.M.; Harwood, D.W. Safety Effects of Horizontal Curve and Grade Combinations on Rural Two-Lane Highways. Transp. Res. Rec. 2013, 2398, 37–49. [Google Scholar] [CrossRef]
- Choudhari, T.; Maji, A. Risk Assessment of Horizontal Curves Based on Lateral Acceleration Index: A Driving Simulator-Based Study. Transp. Dev. Econ. 2021, 7, 2. [Google Scholar] [CrossRef]
- Gooch, J.P.; Gayah, V.V.; Donnell, E.T. Quantifying the Safety Effects of Horizontal Curves on Two-way, Two-lane Rural Roads. Accid. Anal. Prev. 2016, 92, 71–81. [Google Scholar] [CrossRef]
- Arvin, R.; Khattak, A.J.; Kamrani, M.; Rio-Torres, J. Safety evaluation of connected and automated vehicles in mixed traffic with conventional vehicles at intersections. J. Intell. Transp. Syst. 2021, 25, 170–187. [Google Scholar] [CrossRef]
- Deluka Tibljaš, A.; Giuffrè, T.; Surdonja, S.; Trubia, S. Introduction of autonomous vehicles: Roundabouts design and safety performance evaluation. Sustainability 2018, 10, 1060. [Google Scholar] [CrossRef]
- Morando, M.M.; Tian, Q.; Truong, L.T.; Vu, H.L. Studying the safety impact of autonomous vehicles using simulation-based surrogate safety measures. J. Adv. Transp. 2018, 2018, 6135183. [Google Scholar] [CrossRef]
- Wang, Z.J.; Chen, X.M.; Wang, P.; Li, M.X.; Zhang, H. A decision-making model for autonomous vehicles at urban intersections based on conflict resolution. J. Adv. Transp. 2021, 2021, 8894563. [Google Scholar] [CrossRef]
- Zhang, Y.; Guo, L.; Gao, B.; Qu, T.; Chen, H. Deterministic promotion reinforcement learning applied to longitudinal velocity control for automated vehicles. IEEE Trans. Veh. Technol. 2019, 69, 338–348. [Google Scholar] [CrossRef]
- Lillicrap, T.P.; Hunt, J.J.; Pritzel, A.; Heess, N.M.; Erez, T.; Tassa, Y.; Silver, D.; Wierstra, D. Continuous control with deep reinforcement learning. In Proceedings of the ICLR 2016, San Juan, Puerto Rico, 2–4 May 2016. [Google Scholar] [CrossRef]
- Paden, B.; Cáp, M.; Yong, S.Z.; Yershov, D.S.; Frazzoli, E. A Survey of Motion Planning and Control Techniques for Self-Driving Urban Vehicles. IEEE Trans. Intell. Veh. 2016, 1, 33–55. [Google Scholar] [CrossRef]
- Lee, J.W.; Litkouhi, B.A.
- Jo, Y.; Jung, A.; Oh, C.; Park, J.; Yun, D. Suitability Evaluation for Simulated Maneuvering of Autonomous Vehicles. J. Korea Inst. Intell. Transp. Syst. 2022, 21, 183–200. [Google Scholar] [CrossRef]
- Korean Society of Civil Engineering; Korean Association of Professional Road & Airport Engineers. Explanation of the Rules on the Standards of Structural Facilities in Roads; KSCE PRESS: Seoul, Republic of Korea, 2020; pp. 228–277. [Google Scholar]
- Ko, J.; Jang, J.; Oh, C. A Multi-Agent Driving Simulation Approach for Evaluating the Safety Benefits of Connected Vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 23, 4512–4524. [Google Scholar] [CrossRef]
- Ali, Y.; Zheng, Z.; Haque, M.M.; Yildirimoglu, M.; Washington, S. Understanding the discretionary lane-changing behaviour in the connected environment. Accid. Anal. Prev. 2020, 137, 105463. [Google Scholar] [CrossRef] [PubMed]
- Lyu, N.; Cao, Y.; Wu, C.; Xu, J.; Xie, L. The effect of gender, occupation and experience on behavior while driving on a freeway deceleration lane based on field operational test data. Accid. Anal. Prev. 2018, 121, 82–93. [Google Scholar] [CrossRef] [PubMed]
- Beauchamp, E.; Saunier, N.; Cloutier, M. Study of automated shuttle interactions in city traffic using surrogate measures of safety. Transp. Res. Part C Emerg. Technol. 2022, 135, 103465. [Google Scholar] [CrossRef]
- Chen, Y.; Fu, R.; Xu, Q.; Yuan, W. Mobile Phone Use in a Car-Following Situation: Impact on Time Headway and Effectiveness of Driver’s Rear-End Risk Compensation Behavior via a Driving Simulator Study. Int. J. Environ. Res. Public Health 2020, 17, 1328. [Google Scholar] [CrossRef]
- Vogel, K. A comparison of headway and time to collision as safety indicators. Accid. Anal. Prev. 2003, 35, 427–433. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Section ID | Road Conditions | Section ID | Road Conditions | ||||
|---|---|---|---|---|---|---|---|
| Curve | Slope | Length | Curve | Slope | Length | ||
| 1 | Left | - | 500 m | 13 | Left | 1% uphill | 1000 m |
| 2 | Left | - | 1000 m | 14 | Left | 3% uphill | 1000 m |
| 3 | Right | - | 500 m | 15 | Right | 1% downhill | 1000 m |
| 4 | Right | - | 1000 m | 16 | Right | 3% downhill | 1000 m |
| 5 | - | 1% uphill | 120 m | 17 | Right | 1% uphill | 500 m |
| 6 | - | 3% uphill | 360 m | 18 | Right | 3% uphill | 500 m |
| 7 | - | 1% downhill | 55 m | 19 | Left | 1% downhill | 500 m |
| 8 | - | 3% downhill | 165 m | 20 | Left | 3% downhill | 500 m |
| 9 | Left | 1% uphill | 500 m | 21 | Right | 1% uphill | 1000 m |
| 10 | Left | 3% uphill | 500 m | 22 | Right | 3% uphill | 1000 m |
| 11 | Right | 1% downhill | 500 m | 23 | Left | 1% downhill | 1000 m |
| 12 | Right | 3% downhill | 500 m | 24 | Left | 3% downhill | 1000 m |
| AV Pair | Mixed Pair | MV Pair | |||||||
|---|---|---|---|---|---|---|---|---|---|
| N | F | p-Value | N | F | p-Value | N | F | p-Value | |
| 30 | 3839.59 | 0.00 | 30 | 4.25 | 0.00 | 30 | 9.94 | 0.00 | |
| 30 | 278,083.99 | 0.00 | 30 | 3.39 | 0.00 | 30 | 14.18 | 0.00 | |
| 30 | 324,079.95 | 0.00 | 30 | 3.90 | 0.00 | 30 | 1.83 | 0.01 | |
| Section ID | AV Pair | Mixed Pair | MV Pair | ||||||
|---|---|---|---|---|---|---|---|---|---|
| AN (ΔAN) | Std.LP (ΔStd.LP) | Avg.HW (ΔAvg.HW) | AN (ΔAN) | Std.LP (ΔStd.LP) | Avg.HW (ΔAvg.HW) | AN (ΔAN) | Std.LP (ΔStd.LP) | Avg.HW (ΔAvg.HW) | |
| 0 | 0.01−2 | 0.04−5 | 5.90 | 0.05 | 0.02 | 3.97 | 0.10 | 0.05 | 3.86 |
| 1 | 0.05−2 (400) | 0.11−1 (2,749,900) | 2.67 * (−55) | 0.11 (175) | 0.09 (350) | 3.94 (−1) | 0.20 (89) | 0.17 (240) | 3.10 (−20) |
| 2 | 0.04−2 (300) | 0.08−1 (1,999,900) | 2.97 (−50) | 0.08 (100) | 0.09 (350) | 3.68 (−7) | 0.17 (61) | 0.16 (220) | 3.44 (−11) |
| 3 | 0.05−2 (400) | 0.05−1 (1,249,900) | 3.32 (−44) | 0.08 (100) | 0.09 (350) | 3.73 (−6) | 0.14 (32) | 0.17 (240) | 3.81 (−1) |
| 4 | 0.04−2 (300) | 0.03−1 (749,900) | 3.62 (−39) | 0.07 (75) | 0.08 (300) | 3.38 (−15) | 0.16 (51) | 0.16 (220) | 3.80 (−1) |
| 5 | 0.01 * (9900) | 0.05−5 (25) | 3.84 (−35) | 0.06 (50) | 0.05 (150) | 3.21 (−19) | 0.14 (32) | 0.09 (80) | 3.55 (−8) |
| 6 | 0.01 * (9900) | 0.01−4 (150) | 3.98 (−33) | 0.10 (150) | 0.08 (300) | 3.27 (−18) | 0.22 (108) | 0.17 (240) | 3.38 (−12) |
| 7 | 0.01 * (9900) | 0.01−4 (150) | 4.08 (−31) | 0.05 (25) | 0.03 (50) | 3.02 (−24) | 0.11 (4) | 0.06 (20) | 3.34 (−13) |
| 8 | 0.01 * (9900) | 0.01−4 (150) | 4.16 (−29) | 0.10 (150) | 0.07 (250) | 2.81 (−29) | 0.18 (70) | 0.12 (140) | 3.51 (−9) |
| 9 | 0.02−1 (1900) | 0.11−1 (2,749,900) | 4.28 (−27) | 0.08 (100) | 0.09 (350) | 2.92 (−26) | 0.17 (61) | 0.17 (240) | 3.40 (−12) |
| 10 | 0.01 * (9900) | 0.12−1 (2,999,900) | 4.45 (−25) | 0.10 (150) | 0.09 (350) | 2.82 (−29) | 0.24 (127) | 0.16 (220) | 3.29 (−15) |
| 11 | 0.02−2 (100) | 0.14−1 * (3,499,900) | 4.69 (−21) | 0.07 (75) | 0.11 * (450) | 2.53 (−36) | 0.15 (42) | 0.21 * (320) | 2.99 (−22) |
| 12 | 0.01 * (9900) | 0.05−1 (1,249,900) | 4.87 (−17) | 0.10 (150) | 0.09 (350) | 2.71 (−32) | 0.20 (89) | 0.20 (300) | 2.84 (−26) |
| 13 | 0.01−1 (900) | 0.08−1 (1,999,900) | 5.05 (−14) | 0.09 (125) | 0.09 (350) | 2.87 (−28) | 0.28 (165) | 0.18 (260) | 3.27 (−15) |
| 14 | 0.03−1 (2900) | 0.09−1 (2,249,900) | 5.17 (−12) | 0.13 * (225) | 0.09 (350) | 3.23 (−19) | 0.24 (127) | 0.16 (220) | 2.26 (−41) |
| 15 | 0.01−1 (900) | 0.04−1 (999,900) | 5.24 (−11) | 0.08 (100) | 0.09 (350) | 2.59 (−35) | 0.15 (42) | 0.18 (260) | 2.18 * (−45) |
| 16 | 0.03−1 (2900) | 0.04−1 (999,900) | 5.24 (−11) | 0.10 (150) | 0.10 (400) | 2.23 * (−44) | 0.26 (146) | 0.19 (280) | 2.21 (−43) |
| 17 | 0.02−1 (1900) | 0.05−1 (1,249,900) | 5.23 (−11) | 0.08 (100) | 0.09 (350) | 2.76 (−30) | 0.17 (61) | 0.17 (240) | 3.07 (−20) |
| 18 | 0.01 * (9900) | 0.05−1 (1,249,900) | 5.23 (−11) | 0.12 (200) | 0.09 (350) | 2.75 (−31) | 0.23 (117) | 0.18 (260) | 3.41 (−12) |
| 19 | 0.02−1 (1900) | 0.12−1 (2,999,900) | 5.17 (−12) | 0.07 (75) | 0.09 (350) | 2.62 (−34) | 0.16 (51) | 0.18 (260) | 3.32 (−14) |
| 20 | 0.05−1 (4900) | 0.12−1 (2,999,900) | 5.17 (−12) | 0.09 (125) | 0.10 (400) | 2.65 (−33) | 0.20 (89) | 0.18 (260) | 3.46 (−10) |
| 21 | 0.01−1 (900) | 0.04−1 (999,900) | 5.24 (−11) | 0.09 (125) | 0.09 (350) | 2.54 (−36) | 0.18 (70) | 0.18 (260) | 3.02 (−22) |
| 22 | 0.03−1 (2900) | 0.04−1 (999,900) | 5.24 (−11) | 0.13* (225) | 0.09 (350) | 2.60 (−35) | 0.22 (108) | 0.19 (280) | 3.27 (−15) |
| 23 | 0.01−1 (900) | 0.09−1 (2,249,900) | 5.17 (−12) | 0.08 (100) | 0.10 (400) | 2.23 * (−44) | 0.19 (80) | 0.18 (260) | 2.72 (−29) |
| 24 | 0.03−1 (2900) | 0.09−1 (2,249,900) | 5.17 (−12) | 0.13 * (225) | 0.10 (400) | 2.26 (−43) | 0.42 * (297) | 0.20 (300) | 2.73 (−29) |
| Evaluation Target | Safety Indicator | Evaluation Index | Mixed Pair |
|---|---|---|---|
| Longitudinal safety | Acceleration noise | 1000 m left curve 3% uphill 1000 m left curve 3% downhill 1000 m right curve 3% uphill | |
| Lateral safety | Standard deviation of lane position | 500 m right curve 1% downhill | |
| Inter-vehicle safety | Average of headway | 1000 m right curve 3% downhill 1000 m left curve 1% downhill |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jung, A.; Jo, Y.; Oh, C.; Park, J.; Yun, D. A Multi-Agent Driving-Simulation Approach for Characterizing Hazardous Vehicle Interactions between Autonomous Vehicles and Manual Vehicles. Appl. Sci. 2024, 14, 1468. https://doi.org/10.3390/app14041468
Jung A, Jo Y, Oh C, Park J, Yun D. A Multi-Agent Driving-Simulation Approach for Characterizing Hazardous Vehicle Interactions between Autonomous Vehicles and Manual Vehicles. Applied Sciences. 2024; 14(4):1468. https://doi.org/10.3390/app14041468
Chicago/Turabian StyleJung, Aram, Young Jo, Cheol Oh, Jaehong Park, and Dukgeun Yun. 2024. "A Multi-Agent Driving-Simulation Approach for Characterizing Hazardous Vehicle Interactions between Autonomous Vehicles and Manual Vehicles" Applied Sciences 14, no. 4: 1468. https://doi.org/10.3390/app14041468
APA StyleJung, A., Jo, Y., Oh, C., Park, J., & Yun, D. (2024). A Multi-Agent Driving-Simulation Approach for Characterizing Hazardous Vehicle Interactions between Autonomous Vehicles and Manual Vehicles. Applied Sciences, 14(4), 1468. https://doi.org/10.3390/app14041468