
Gender Identification of Chinese Mitten Crab Juveniles Based on Improved Faster R-CNN


Abstract
1. Introduction
- Proposing a model structure based on Faster R-CNN to enhance gender identification accuracy in Chinese mitten crab juveniles, especially in scenarios prone to misjudgments.
- Integrating the backbone feature extraction network Swin Transformer with PAFPN to augment the model’s feature extraction capability.
- Introducing an attention mechanism in the ROI layer to further refine the accuracy of the target detection frame.
- Employing an improved non-maximum suppression algorithm and focal loss function to train the model, thereby focusing more on samples that are challenging to distinguish.
2. Materials and Methods
2.1. Materials
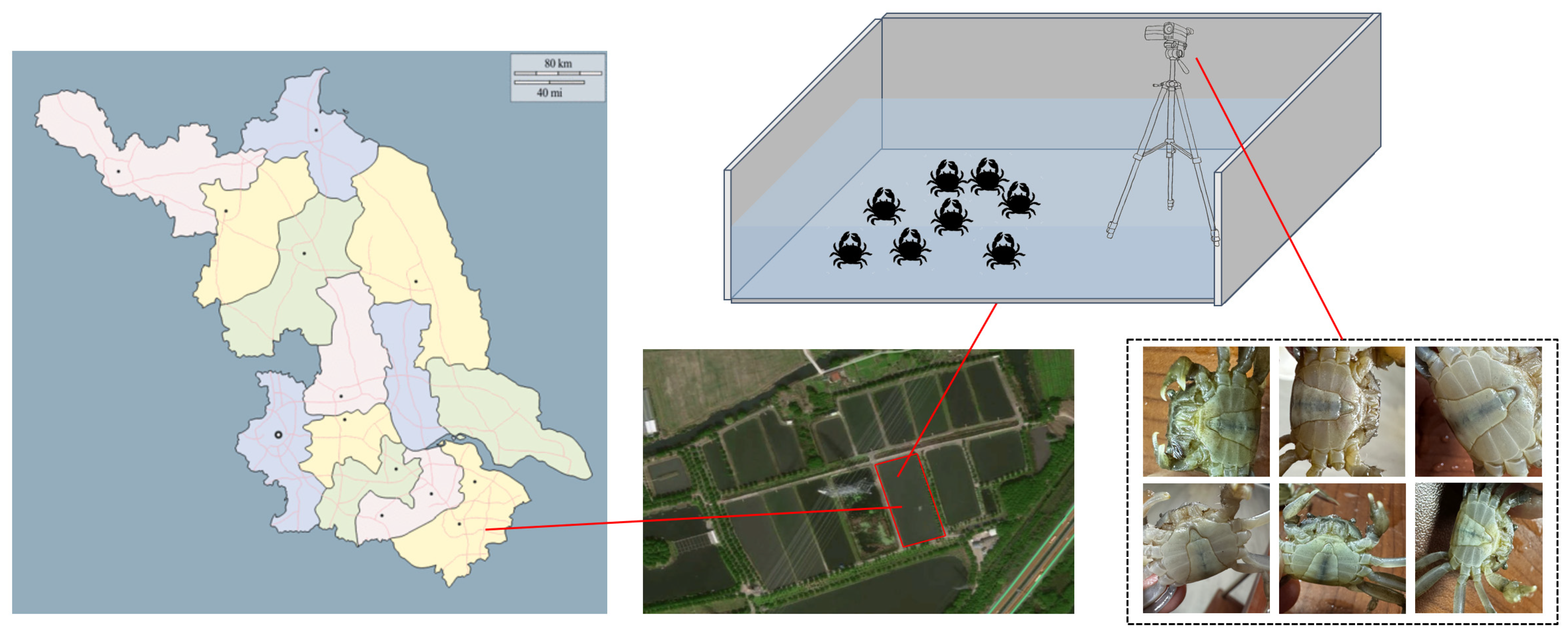
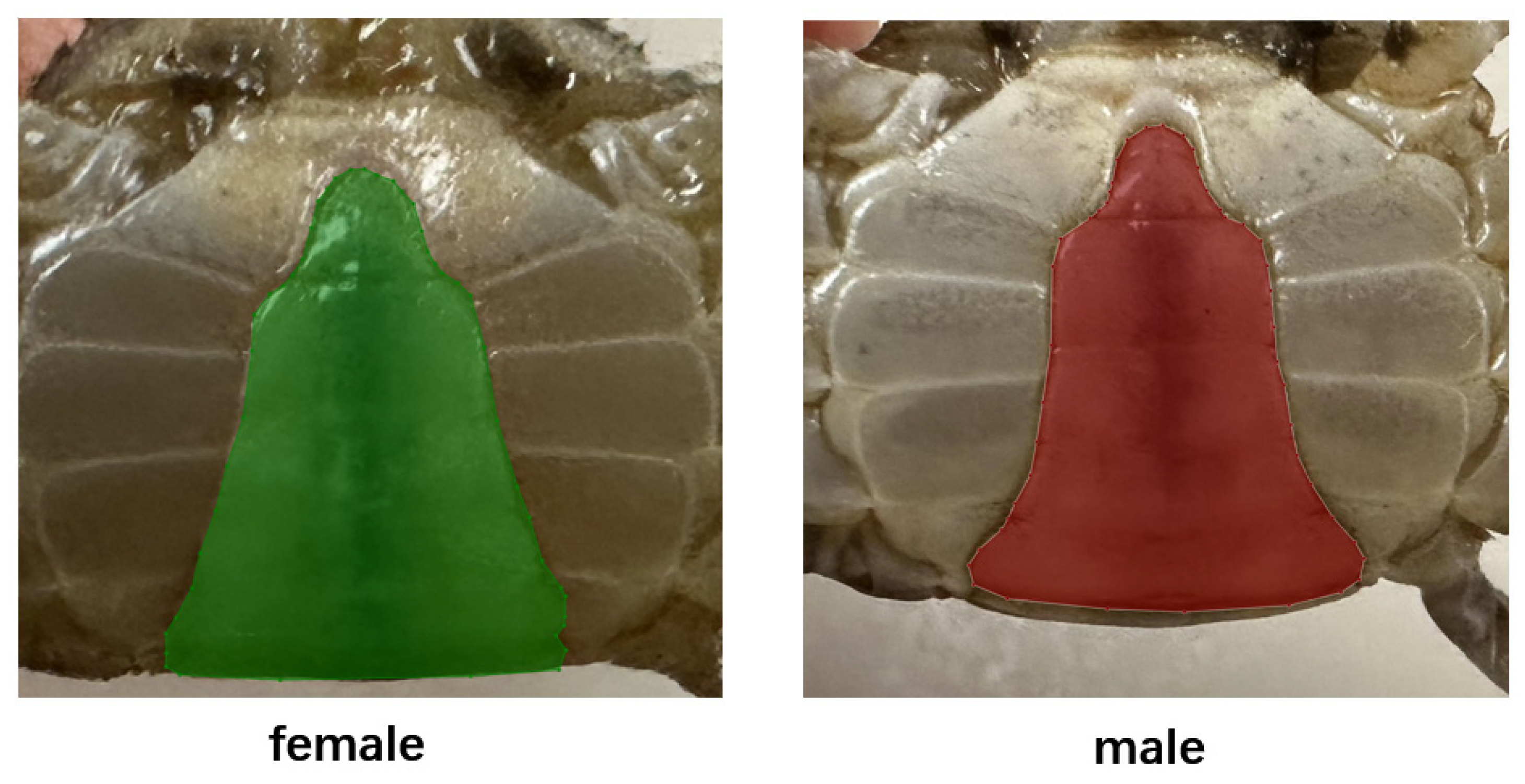
2.1.1. Image Acquisition and Annotation
2.1.2. Image Augmentation
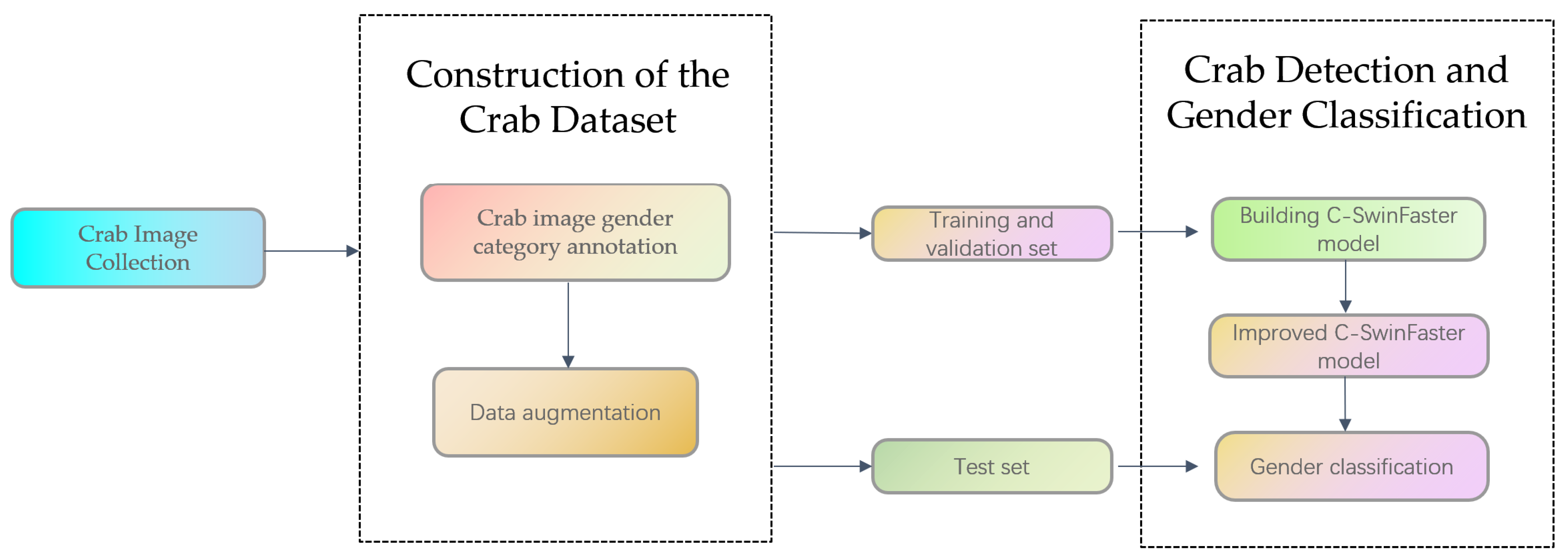
2.2. Overall Process Flow of the Proposed Method
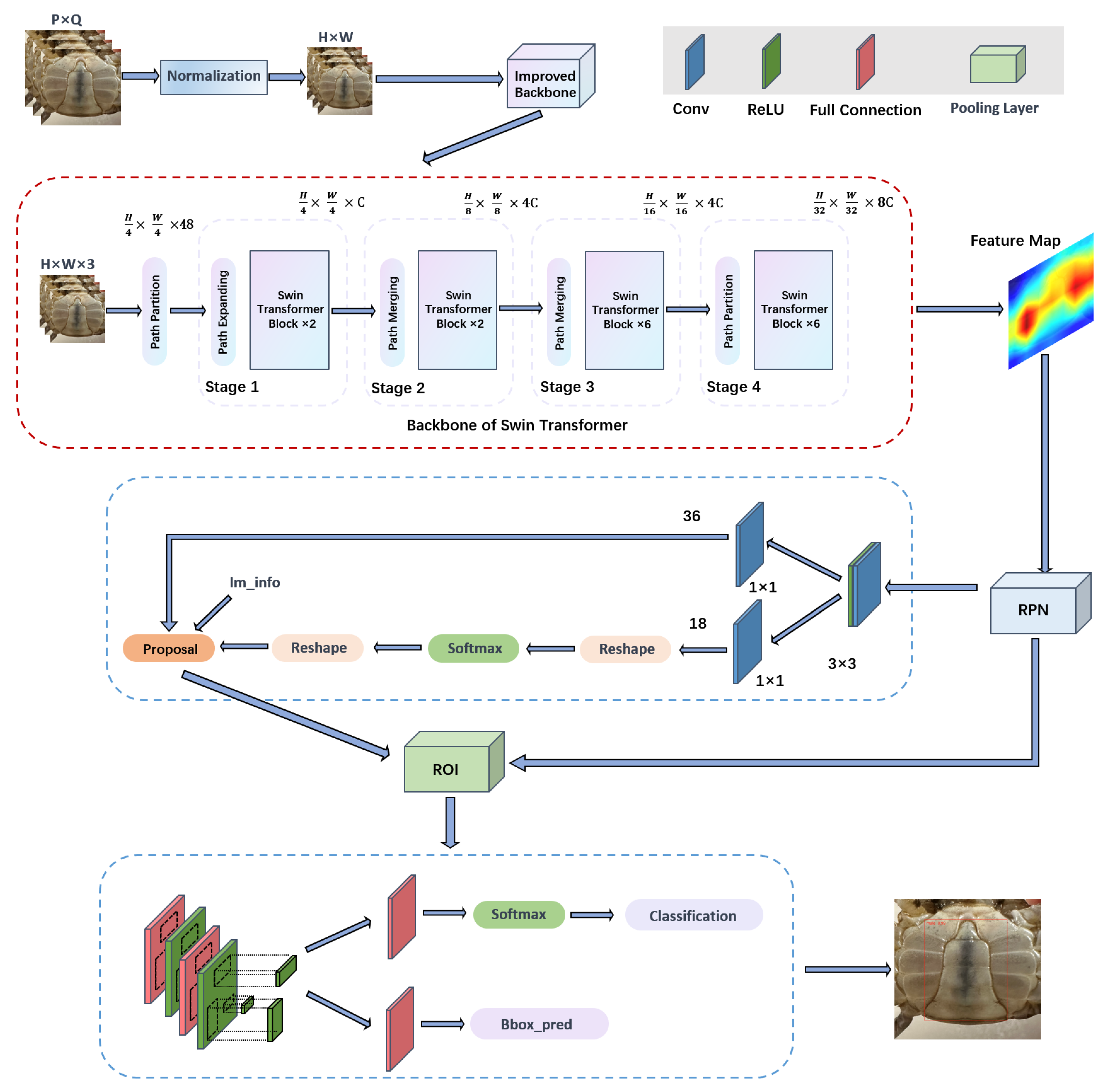
2.3. Methods
2.3.1. Swin Transformer
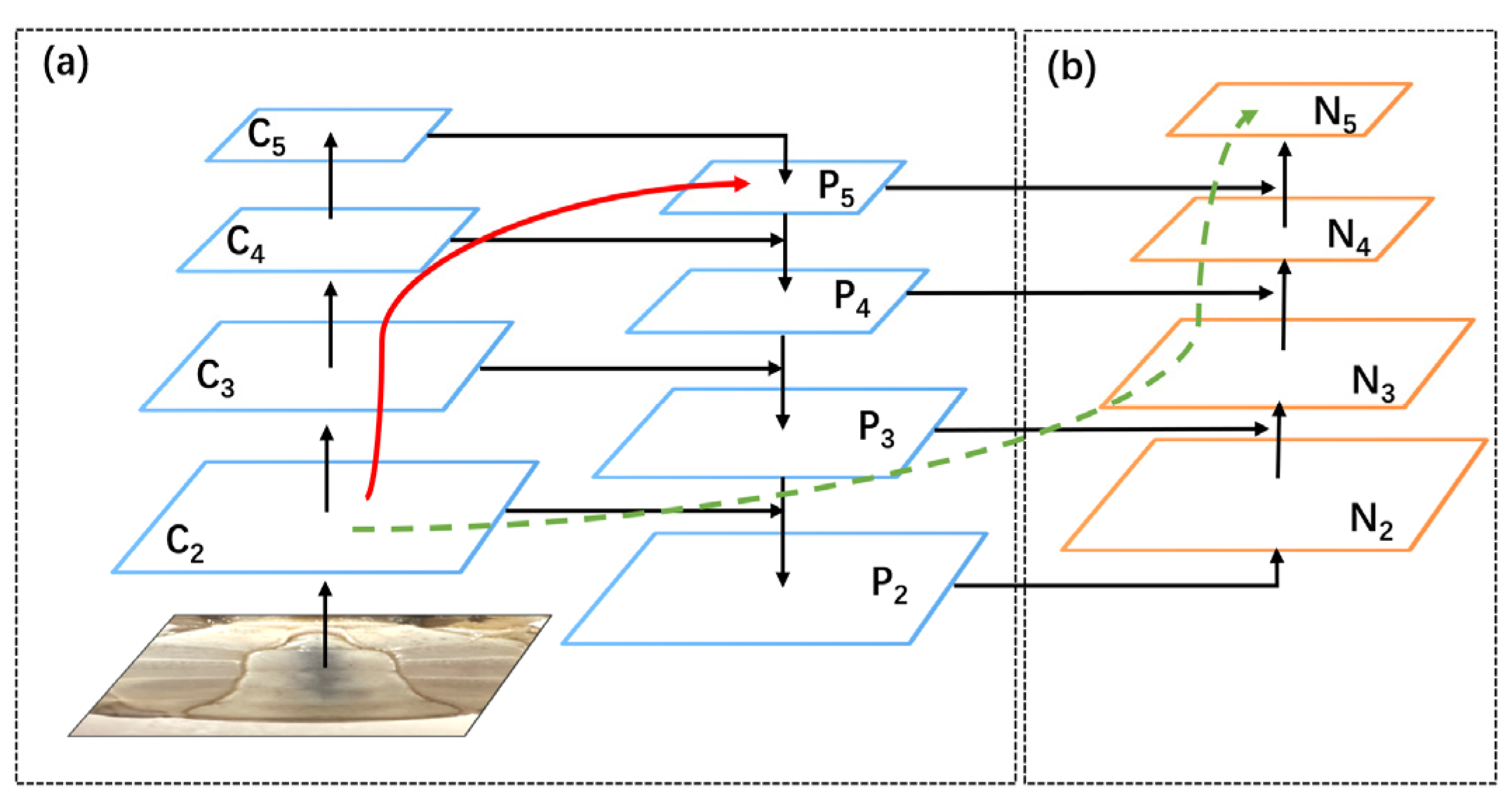
2.3.2. PAFPN
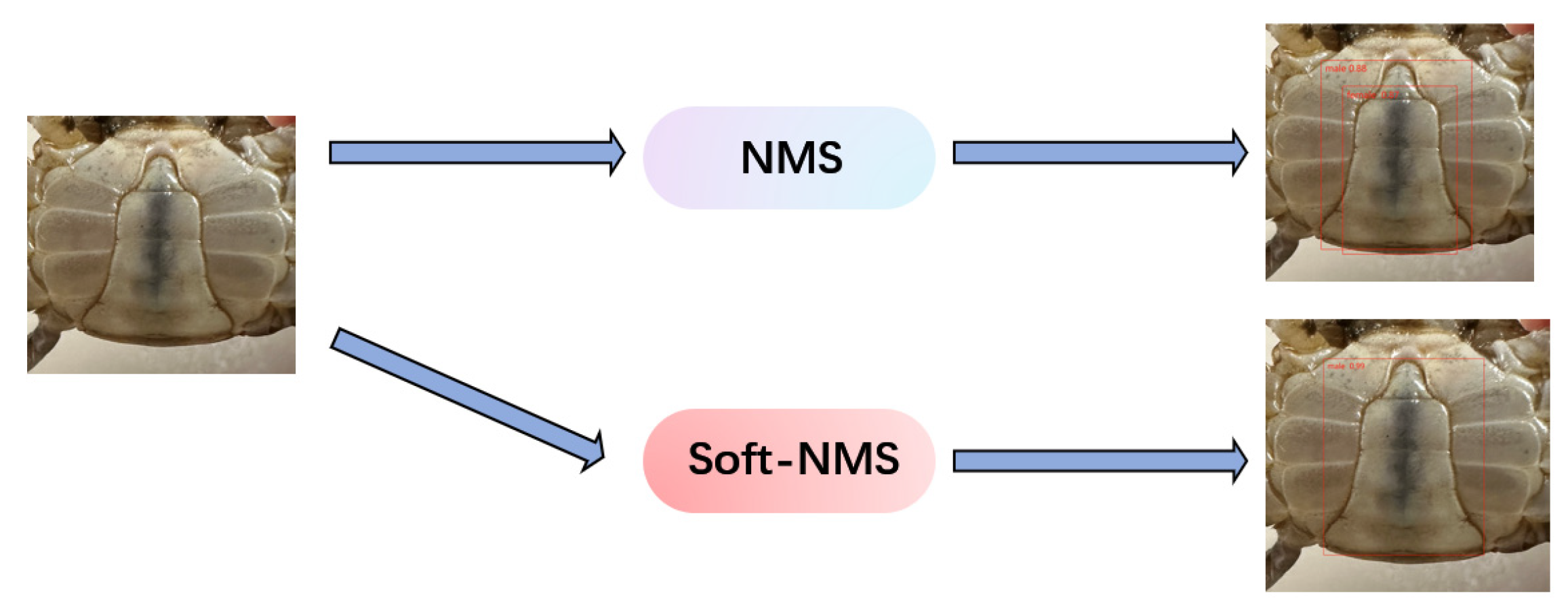
2.3.3. Softer-NMS
2.3.4. FocalLoss
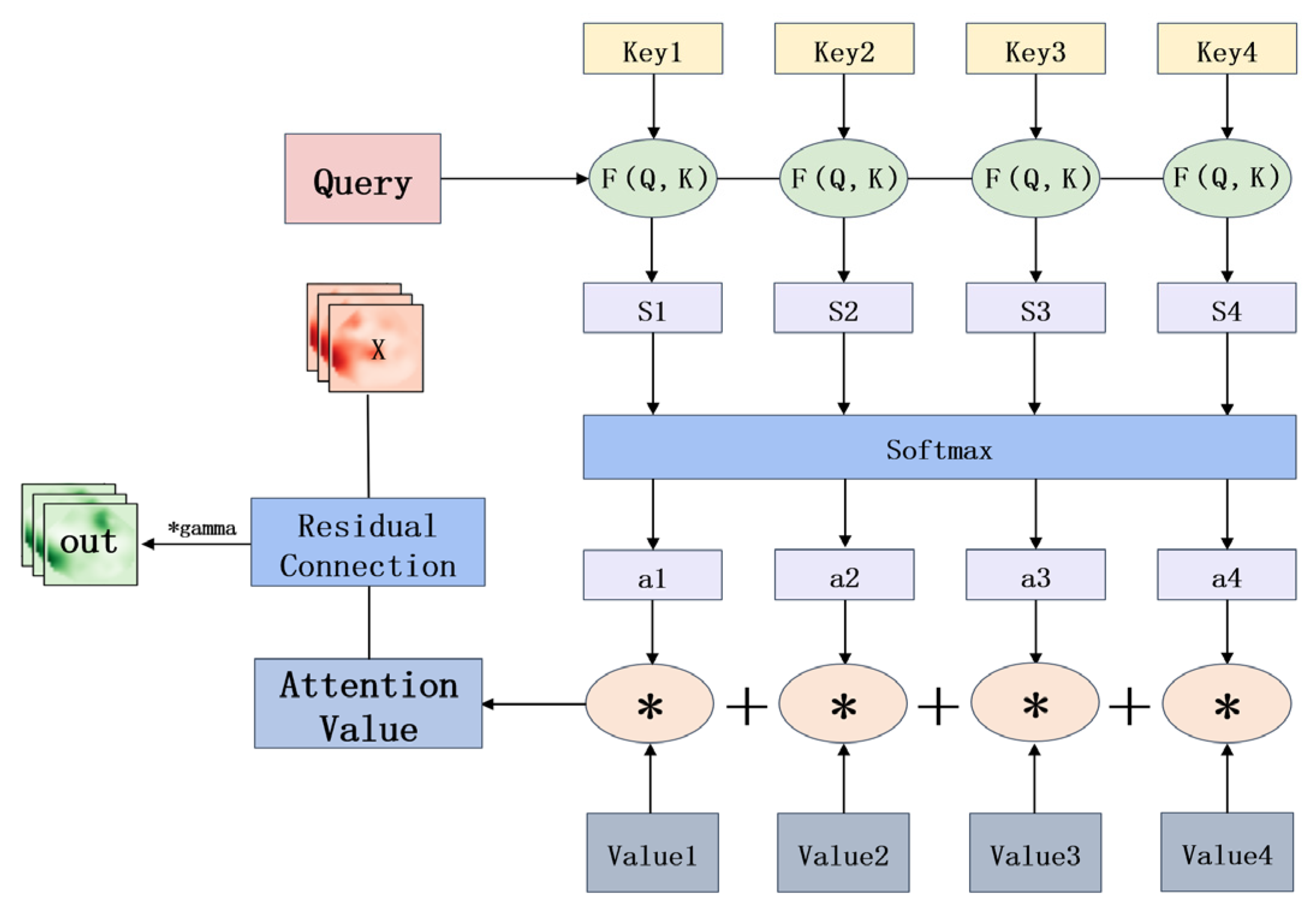
2.3.5. ROI Integrating Attention Mechanism
3. Experiment and Analysis
3.1. Experimental Configuration
3.2. Evaluation Metrics
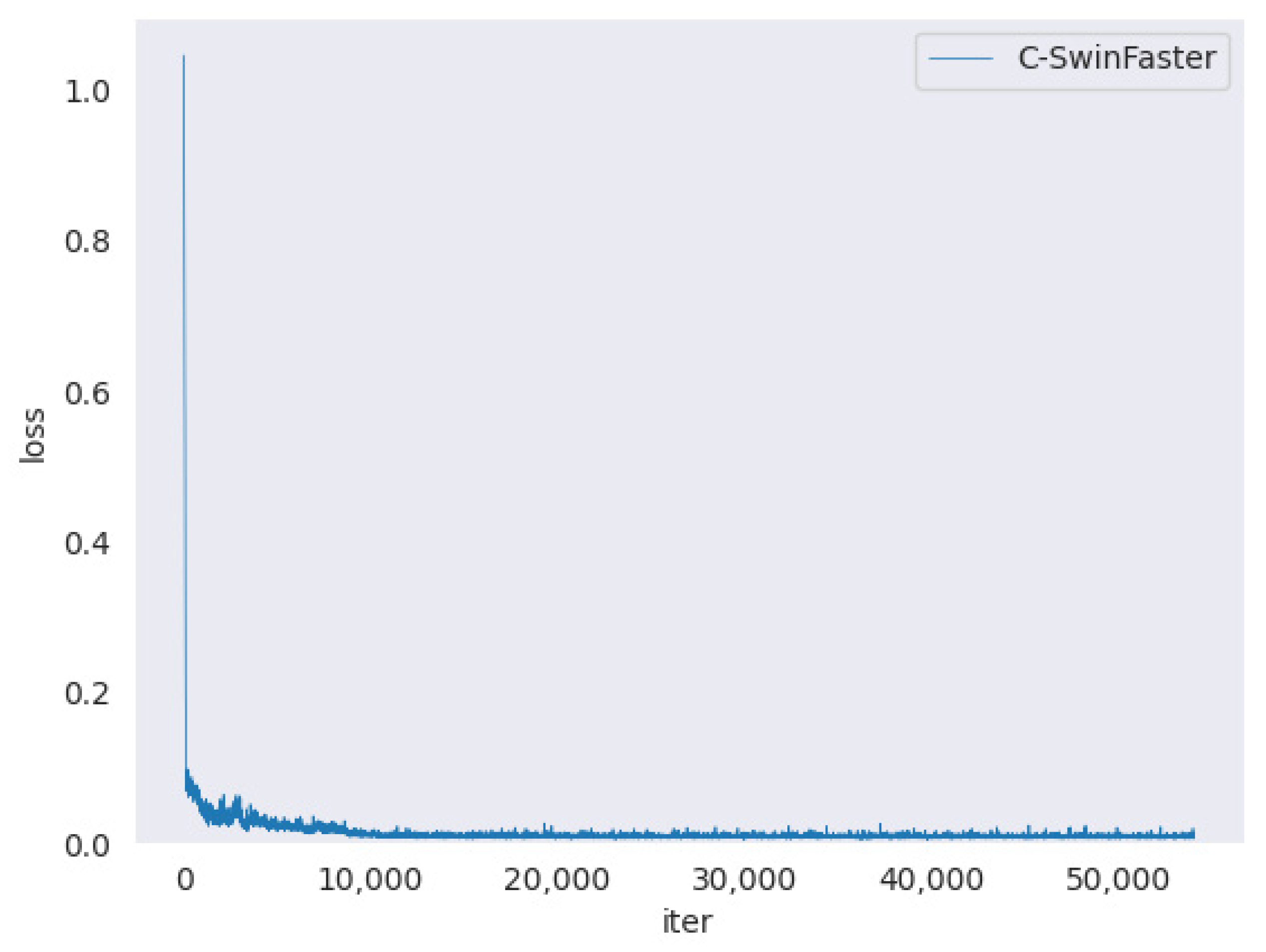
3.3. Network Training Results
4. Discussion
4.1. Comparison of Different Algorithms
4.2. Ablation Experiment
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xu, G.; Han, W.; Sun, Y.; Lu, Z.; Long, Q.; Cheng, Y. Impacts of Three Feeding Modes on the Diet Composition and Contribution Ratios for Juvenile Chinese Mitten Crab Eriocheir sinensis. Aquac. Rep. 2023, 29, 101516. [Google Scholar] [CrossRef]
- Zhu, S.; Long, X.; Turchini, G.M.; Deng, D.; Cheng, Y.; Wu, X. Towards Defining Optimal Dietary Protein Levels for Male and Female Sub-Adult Chinese Mitten Crab, Eriocheir sinensis Reared in Earthen Ponds: Performances, Nutrient Composition and Metabolism, Antioxidant Capacity and Immunity. Aquaculture 2021, 536, 736442. [Google Scholar] [CrossRef]
- Liu, X.; Wu, H.; Wang, Y.; Liu, Y.; Zhu, H.; Li, Z.; Shan, P.; Yuan, Z. Comparative Assessment of Chinese Mitten Crab Aquaculture in China: Spatiotemporal Changes and Trade-Offs. Environ. Pollut. 2023, 337, 122544. [Google Scholar] [CrossRef] [PubMed]
- Zhang, G.; Jiang, X.; Zhou, W.; Chen, W.; Levy, T.; Wu, X. Stocking Density Affects Culture Performance and Economic Profit of Adult All-Female Chinese Mitten Crabs (Eriocheir sinensis) Reared in Earthen Ponds. Aquaculture 2024, 581, 740352. [Google Scholar] [CrossRef]
- Yang, Z.; Wei, B.; Liu, Q.; Cheng, Y.; Zhou, J. Individual Growth Pattern of Juvenile Stages of the Chinese Mitten Crab (Eriocheir sinensis) Reared under Laboratory Conditions. Aquac. Int. 2018, 26, 645–657. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, S.; Zhang, S.; Li, J.; Sun, Y. Research on Target Detection and Recognition Algorithm of Eriocheir sinensis Carapace. Multimed. Tools Appl. 2023, 82, 42527–42543. [Google Scholar] [CrossRef]
- Liu, C.; Wang, Z.; Li, Y.; Zhang, Z.; Li, J.; Xu, C.; Du, R.; Li, D.; Duan, Q. Research Progress of Computer Vision Technology in Abnormal Fish Detection. Aquac. Eng. 2023, 103, 102350. [Google Scholar] [CrossRef]
- Liu, C.; Liu, Y.; Zhang, Q.; Li, X.; Wu, T.; Li, Q. A Two-Stage Classification Algorithm for Radar Targets Based on Compressive Detection. EURASIP J. Adv. Signal Process 2021, 2021, 23. [Google Scholar] [CrossRef]
- Xu, G.; Xu, X.; Gao, H.; Xiao, F. FP-RCNN: A Real-Time 3D Target Detection Model Based on Multiple Foreground Point Sampling for Autonomous Driving. Mob. Netw. Appl. 2023, 28, 369–381. [Google Scholar] [CrossRef]
- Ahmad, M.; Ahmed, I.; Jeon, G. An IoT-Enabled Real-Time Overhead View Person Detection System Based on Cascade-RCNN and Transfer Learning. J. Real. Time Image Process 2021, 18, 1129–1139. [Google Scholar] [CrossRef]
- Arora, N.; Kumar, Y.; Karkra, R.; Kumar, M. Automatic Vehicle Detection System in Different Environment Conditions Using Fast R-CNN. Multimed. Tools Appl. 2022, 81, 18715–18735. [Google Scholar] [CrossRef]
- Zhang, Z.; Shi, R.; Xing, Z.; Guo, Q.; Zeng, C. Improved Faster Region-Based Convolutional Neural Networks (R-CNN) Model Based on Split Attention for the Detection of Safflower Filaments in Natural Environments. Agronomy 2023, 13, 2596. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, H.; Wang, X.; Liu, Q.; Wang, H.; Wang, H. Vehicle Object Detection Method Based on Candidate Region Aggregation. Pattern Anal. Appl. 2021, 24, 1635–1647. [Google Scholar] [CrossRef]
- Qiu, Z.; Wang, S.; Zeng, Z.; Yu, D. Automatic Visual Defects Inspection of Wind Turbine Blades via YOLO-Based Small Object Detection Approach. J. Electron. Imaging 2019, 28, 43023. [Google Scholar] [CrossRef]
- Ding, L.; Xu, X.; Cao, Y.; Zhai, G.; Yang, F.; Qian, L. Detection and Tracking of Infrared Small Target by Jointly Using SSD and Pipeline Filter. Digit. Signal Process 2021, 110, 102949. [Google Scholar] [CrossRef]
- Mu, X.; He, L.; Heinemann, P.; Schupp, J.; Karkee, M. Mask R-CNN Based Apple Flower Detection and King Flower Identification for Precision Pollination. Smart Agric. Technol. 2023, 4, 100151. [Google Scholar] [CrossRef]
- Cao, S.; Zhao, D.; Sun, Y.; Ruan, C. Learning-Based Low-Illumination Image Enhancer for Underwater Live Crab Detection. ICES J. Mar. Sci. 2021, 78, 979–993. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, X.; Shen, Z. YOLO-Submarine Cable: An Improved YOLO-V3 Network for Object Detection on Submarine Cable Images. J. Mar. Sci. Eng. 2022, 10, 1143. [Google Scholar] [CrossRef]
- Zhang, J.; Shi, Y.; Yang, J.; Guo, Q. KD-SCFNet: Towards More Accurate and Lightweight Salient Object Detection via Knowledge Distillation. Neurocomputing 2024, 572, 127206. [Google Scholar] [CrossRef]
- Ji, W.; Peng, J.; Xu, B.; Zhang, T. Real-Time Detection of Underwater River Crab Based on Multi-Scale Pyramid Fusion Image Enhancement and MobileCenterNet Model. Comput. Electron. Agric. 2023, 204, 107522. [Google Scholar] [CrossRef]
- Liu, S.; Zhang, X.; Wang, X.; Hou, X.; Chen, X.; Xu, J. Tomato Flower Pollination Features Recognition Based on Binocular Gray Value-Deformation Coupled Template Matching. Comput. Electron. Agric. 2023, 214, 108345. [Google Scholar] [CrossRef]
- Cui, Y.; Pan, T.; Chen, S.; Zou, X. A Gender Classification Method for Chinese Mitten Crab Using Deep Convolutional Neural Network. Multimed. Tools Appl. 2020, 79, 7669–7684. [Google Scholar] [CrossRef]
- Xue, J.; Jiang, T.; Chen, X.; Liu, H.; Yang, J. Multi-Mineral Fingerprinting Analysis of the Chinese Mitten Crab (Eriocheir sinensis) in Yangcheng Lake during the Year-Round Culture Period. Food Chem. 2022, 390, 133167. [Google Scholar] [CrossRef]
- Russell, B.C.; Torralba, A.; Murphy, K.P.; Freeman, W.T. LabelMe: A Database and Web-Based Tool for Image Annotation. Int. J. Comput. Vis. 2008, 77, 157–173. [Google Scholar] [CrossRef]
- Su, P.; Han, H.; Liu, M.; Yang, T.; Liu, S. MOD-YOLO: Rethinking the YOLO Architecture at the Level of Feature Information and Applying It to Crack Detection. Expert Syst. Appl. 2024, 237, 121346. [Google Scholar] [CrossRef]
- Wang, J.; Zeng, Z.; Sharma, P.K.; Alfarraj, O.; Tolba, A.; Zhang, J.; Wang, L. Dual-Path Network Combining CNN and Transformer for Pavement Crack Segmentation. Autom. Constr. 2024, 158, 105217. [Google Scholar] [CrossRef]
- Xu, Z.; Li, T.; Liu, Y.; Zhan, Y.; Chen, J.; Lukasiewicz, T. PAC-Net: Multi-Pathway FPN with Position Attention Guided Connections and Vertex Distance IoU for 3D Medical Image Detection. Front. Bioeng. Biotechnol. 2023, 11, 1049555. [Google Scholar] [CrossRef]
- Ding, J.; Zhang, J.; Zhan, Z.; Tang, X.; Wang, X. A Precision Efficient Method for Collapsed Building Detection in Post-Earthquake UAV Images Based on the Improved NMS Algorithm and Faster R-CNN. Remote Sens. 2022, 14, 663. [Google Scholar] [CrossRef]
- Hu, K.; Zhang, Z.; Niu, X.; Zhang, Y.; Cao, C.; Xiao, F.; Gao, X. Retinal Vessel Segmentation of Color Fundus Images Using Multiscale Convolutional Neural Network with an Improved Cross-Entropy Loss Function. Neurocomputing 2018, 309, 179–191. [Google Scholar] [CrossRef]
- Priyanka; Baranwal, N.; Singh, K.N.; Singh, A.K. YOLO-Based ROI Selection for Joint Encryption and Compression of Medical Images with Reconstruction through Super-Resolution Network. Future Gener. Comput. Syst. 2024, 150, 1–9. [Google Scholar] [CrossRef]
- Hou, P.; Zhang, J.; Jiang, Z.; Tang, Y.; Lin, Y. A Bearing Fault Diagnosis Method Based on Dilated Convolution and Multi-Head Self-Attention Mechanism. Appl. Sci. 2023, 13, 2770. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data | Female | Male |
|---|---|---|
| Original data | 280 | 260 |
| First data augmentation | 840 | 780 |
| Second data augmentation | 3360 | 3120 |
| Classification Result Category | Actual Sample Category | |
|---|---|---|
| Positive Sample | Negative Sample | |
| Positive Sample | True Positive (TP) | False Positive (FP) |
| Negative Sample | False Negative (FN) | True Negative (TN) |
| Algorithm | Backbone | mAP50-95 (%) | mAP50 (%) | mAP75 (%) |
|---|---|---|---|---|
| Faster R-CNN | ResNet-50 | 88.12 | 89.11 | 86.53 |
| Cascade-RCNN | ResNet-101 | 92.73 | 93.76 | 90.87 |
| Mask RCNN | ResNet-101 | 89.22 | 91.64 | 90.59 |
| SSD | SSDVGG | 86.69 | 88.77 | 84.98 |
| YOLOv8 | CSPDarkNet | 95.54 | 96.01 | 92.36 |
| C-SwinFaster | Swin Transformer | 98.45 | 98.79 | 98.19 |
| Method | Swin-T | PAFPN | Soft-NMS | Focal Loss | Attention | Time (s) | mAP (%) |
|---|---|---|---|---|---|---|---|
| Faster R-CNN | 31 | 88.12 | |||||
| Improve1 | √ | 41 | 90.88 | ||||
| Improve2 | √ | √ | 35 | 92.67 | |||
| Improve3 | √ | √ | √ | 32 | 93.98 | ||
| Improve4 | √ | √ | √ | √ | 28 | 94.69 | |
| C-SwinFaster | √ | √ | √ | √ | √ | 33 | 98.45 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, H.; Chen, M.; Gan, D. Gender Identification of Chinese Mitten Crab Juveniles Based on Improved Faster R-CNN. Appl. Sci. 2024, 14, 908. https://doi.org/10.3390/app14020908
Gu H, Chen M, Gan D. Gender Identification of Chinese Mitten Crab Juveniles Based on Improved Faster R-CNN. Applied Sciences. 2024; 14(2):908. https://doi.org/10.3390/app14020908
Chicago/Turabian StyleGu, Hao, Ming Chen, and Dongmei Gan. 2024. "Gender Identification of Chinese Mitten Crab Juveniles Based on Improved Faster R-CNN" Applied Sciences 14, no. 2: 908. https://doi.org/10.3390/app14020908
APA StyleGu, H., Chen, M., & Gan, D. (2024). Gender Identification of Chinese Mitten Crab Juveniles Based on Improved Faster R-CNN. Applied Sciences, 14(2), 908. https://doi.org/10.3390/app14020908