1. Introduction
Since the 21st century, life expectancy has increased with the development of science and medical technology, and the aging of the population has become a social issue throughout the world due to the decline in the fertility rate due to the global economic downturn and low growth [
1]. Against this social background, the silver industry, healthcare market, and care service market to support them are continuously growing. As the elderly population increases, most of them are burdened with long-distance walking due to their physical aging, and the advanced technology of assistive devices to guarantee their right to move is becoming a hot topic. Wheelchairs are used as assistive devices for those who have difficulties in walking normally due to innate or acquired reasons [
2]. In response to this demand, the wheelchair market size is expected to grow by 7.40% annually to reach
$9.5 billion by 2032, of which the market size of electric wheelchairs accounts for more than 50% [
3]. Here, 58.9% of users of electric assistive devices such as electric wheelchairs experienced accidents, of which 34.5% were involved in crashes [
4]. Although it depends on the degree of disability among people with disabilities such as cognition, movement, and sensation, they generally have difficulties in fine manipulation of the joystick used for electric wheelchair operation [
5].
As a result, research is being conducted to assist wheelchair convenience and collision stability by applying it to wheelchairs due to the advancement of indoor autonomous driving technology used in AGVs (Automated Guided Vehicles) and AMRs (Autonomous Mobile Robots), which have recently become a technical topic following the advent of the fourth industry [
6].
Based on research on applying the autonomous driving technology of mobile robots as wheelchairs, wheelchairs capable of autonomous driving are used to help wheelchair users move only in limited spaces such as hospitals [
7]. Due to the support of wheelchairs capable of autonomous driving in indoor spaces, users who complain of difficulties in wheelchair operation can use them without any manipulation. Thus, it is a hot issue because it can prevent collisions caused by inexperience in operation [
8]. However, for current autonomous driving technology, prior data are essential to actively move to the destination based on the current position through the pre-map information [
9]. Therefore, the current indoor autonomous driving technology cannot utilize autonomous driving in a mapless environment because it is difficult to create a route for driving to the destination through position estimation without prior map information [
10].
Unlike autonomous robots, wheelchairs are not limited to the space of use, but move various indoors/outdoors with the user’s means of transportation. Thus, there is a limit to configuring all driving environments as a map DB. Therefore, the current autonomous driving system can be used in some environments where a map exists, but it is difficult to use it in most outdoor environments and mapless environments. Therefore, current autonomous driving can support indoor movement with a map, which is the main use space for wheelchairs, but it is difficult to assist in long-distance travel or moving to other activity areas [
11]. Most wheelchairs move outdoors through a vehicle that can be used for wheelchair boarding and enter and exit the building by getting in and out of the main active space, such as the entrance of the building or the entrance of the housing complex, but it is difficult to hold a map in a pre-space with high volatility and a lack of feature points, such as the entrance of a hospital or the entrance of a housing complex [
12,
13]. Therefore, it is difficult to apply the current autonomous driving technology in the case of active driving at the entrance of a building without prior map information. Therefore, the current self-driving wheelchair is used as an autonomous driving device in a specific building, which is difficult to support when moving to various spaces. Therefore, in order to solve the above problem, this study proposes a position and direction estimation method for driving assistance technology that guides the position and direction to the destination of the wheelchair for active driving of the intelligent wheelchair at the entrance of a space where the current autonomous driving system is difficult to apply, such as mapless environments.
Research and development of active driving assistance technology in mapless situations is being used in docking technologies such as AGVs and cleaning robots [
14]. Laser guidance-based technology is a method in which a laser emitted from a robot receives a reflected laser through a reflector mounted at a specific point and estimates its position through triangulation based on the measured distance [
15]. However, if there is an obstacle between the laser and the reflector, the distance cannot be measured, and the measurement accuracy is reduced due to the influence of weather such as rain and fog [
16,
17]. Therefore, this is not a suitable technology for intelligent wheelchairs used outdoors and in places where environmental variables occur and coexist with people. For this reason, the technology is not suitable for use as an active driving assistance technique for wheelchairs that move with people. In the case of driving assistance systems through QR codes, they are mainly used for docking technologies because of their high accuracy in close proximity compared to other technologies [
18,
19]. However, in the case of QR codes, the measurement distance varies depending on the measurement camera or H/W, but in general, if the measurement distance is relatively short compared to other technologies and is not perpendicular to the camera and QR code, the measurement error increases, and the QR code must be attached to the floor or ceiling, making it unsuitable for the intelligent wheelchair system targeted in this study [
20,
21]. In the case of a driving system through ultrasonic sensors, the ultrasonic sensor at a specific point is mounted to receive the launched data, measure the distance, estimate the position through triangulation, and use it for driving assistance technology [
22]. However, it is difficult for multiple modules to transmit and receive at the same time due to the interference caused by overlapping signals from different sensors, which are strongly influenced by the measurement distance caused by obstacles in the ultrasonic sensor [
23,
24]. Therefore, it is not a suitable technology for use in intelligent wheelchairs because it is difficult for multiple intelligent wheelchairs to transmit and receive signals at the same time. Position estimation techniques such as Wi-Fi/Bluetooth/Zigbee and others use distance-based triangulation to calculate positions using the characteristics of constant attenuation of radio waves in space according to distance [
25]. The RSSI (Received Signal Strength Indication) method has a problem of increasing position error due to difficulties in measuring accurate signal strength because of differences in the characteristics between antenna and front-end radio frequency (RF) and has lower accuracy than ToA (Time of Arrival) based on arrival time in an outdoor environment where many people exist due to low permeability [
26]. Therefore, it is not a suitable technology as a position estimation system for driving assistance for intelligent wheelchairs.
Therefore, this study proposes a position and direction estimation system based on UWB (ultra-wide band) with relatively high permeability and various bandwidths to measure distance based on the arrival time of radio waves in order to solve the problem mentioned above [
27]. In the case of UWB sensors, it has the advantage of being able to estimate the position regardless of changes in the topography after being installed at a fixed position, and it is being installed in various mobile devices such as mobile phones. In the future, it is expected to be able to access mobile devices without a separate installation, and because accessibility increases, it is suitable for use as a position estimation device [
28]. However, the existing single UWB sensor-based estimation technology has the disadvantage that the position estimation through only UWB sensors is difficult to use as a driving assistance technology due to its low accuracy and difficulty in estimating the direction [
29,
30].
Therefore, it is necessary to improve the existing position and direction estimation system for the development of a driving assistance system for the wide use of autonomous driving technology of wheelchairs. In this study, sensors such as encoders and IMU that can implement position estimation are applied to reduce noise and outliers and improve positioning accuracy in the existing UWB sensor-based position estimation method. Through this, this study proposes a position and direction estimation system with a level of accuracy that can assist driving through fusion with existing UWB sensor-based position estimation data based on dead reckoning suitable for wheelchair environments.
2. Main Subject
UWB is a low-power ultra-wide band-based wireless communication technology that enables distance measurement and data transmission and reception. However, it is limited because high noise and outlier data are included to be used as position estimation for driving assistance rather than general position estimation. Therefore, to overcome these limitations, this study generally uses a single UWB sensor fused with encoder and IMU sensors, which have high accuracy when measuring at short distances, and the shortcomings of the data, including high noise and outliers, can be improved. Based on this, this study proposes a sensor fusion-based position and direction estimation system that can actively implement a driving assistance system in mapless situations for wheelchair users.
2.1. Sensor System for Active Driving Assistance
2.1.1. UWB
UWB is an ultra-wide wireless communication technology that enables distance measurement and data transmission and reception over a bandwidth of 500 Mhz or more. It is possible to measure distance through the transmission time or transmission time difference information rather than the existing RSSI method of measurement, and it is easy to use in various environments due to high obstacle permeability because it uses a measurement method through radio waves. However, when estimating positions through a single UWB sensor, the accuracy is not high because of the problem of strong outliers, due to the influence of multiple paths caused by diffraction and reflection of radio waves and noise through the transmission and reception of radio waves. Therefore, to solve this problem, various filters such as EKF are used to increase accuracy by removing outliers and noise [
31,
32]. However, the single sensor-based method has difficulty correcting data distortion through obstacles during driving, and it is difficult to use as a driving assistance system because delays occur when suppressing noise strongly to increase accuracy. Therefore, in this study, a UWB sensor-based position and direction estimation system suitable for a wheelchair environment is proposed. In order to solve the problem of a single UWB sensor, a position and direction estimation system for driving assistance is designed, entailing position estimation using multiple sensors rather than position estimation through a single sensor.
2.1.2. IMU
In this study, the IMU sensor was used to correct the direction data of the UWB sensor. In the case of direction estimation through the UWB sensor, data tremors caused by the radio wave reception strength and obstacles to the UWB sensor data occur, and the UWB sensor-based direction estimation can cause strong errors. Therefore, the direction estimation was corrected through angular velocity data for IMU sensors with a high short-range measurement accuracy. IMU sensors are usually mounted at the center of the robot drive shaft and used to measure the robot direction. They consist of acceleration, geomagnetic, and angular velocity sensors, and assuming that the robot moves in a plane, the angle of the robot is limited to the yaw axis, which can be calculated from angular velocity and geomagnetic sensors. However, in the case of geomagnetism, the noise caused by iron or structures that are heavily affected by the electromagnetic field is strong, and it is difficult to use when considering the electromagnetic field through the motor [
33]. Therefore, the estimation in this study used only angular velocity data. However, in the case of the angular velocity data, it is difficult to know the initial direction and has a drift error in which errors accumulate over time. Therefore, in this study, the direction of improving the shortcomings through fusion with the UWB sensor was estimated.
2.1.3. Encoder
An encoder sensor was used to correct the position data of the UWB sensor applied in this study. The encoder sensor is mainly mounted on the wheel of the robot to measure the change in movement, such as the rotation of the wheel, and to calculate the speed or moving path of the wheelchair. Encoder sensor data are mainly used to calculate short-range driving routes because they have high accuracy in calculating instantaneous wheel rotation speed. Since this sensor has a relatively high short-range measurement accuracy compared to other sensors, it was used in this study to correct the position estimation error of the UWB sensor. However, the position where the data are accumulated through the encoder sensor makes it difficult to estimate the initial position and the data have a drift error in which errors due to slip and friction are accumulated. Therefore, in this study, the shortcomings were improved through fusion with the UWB sensor.
2.2. Proposed Position Estimation System for Active Driving Assistance
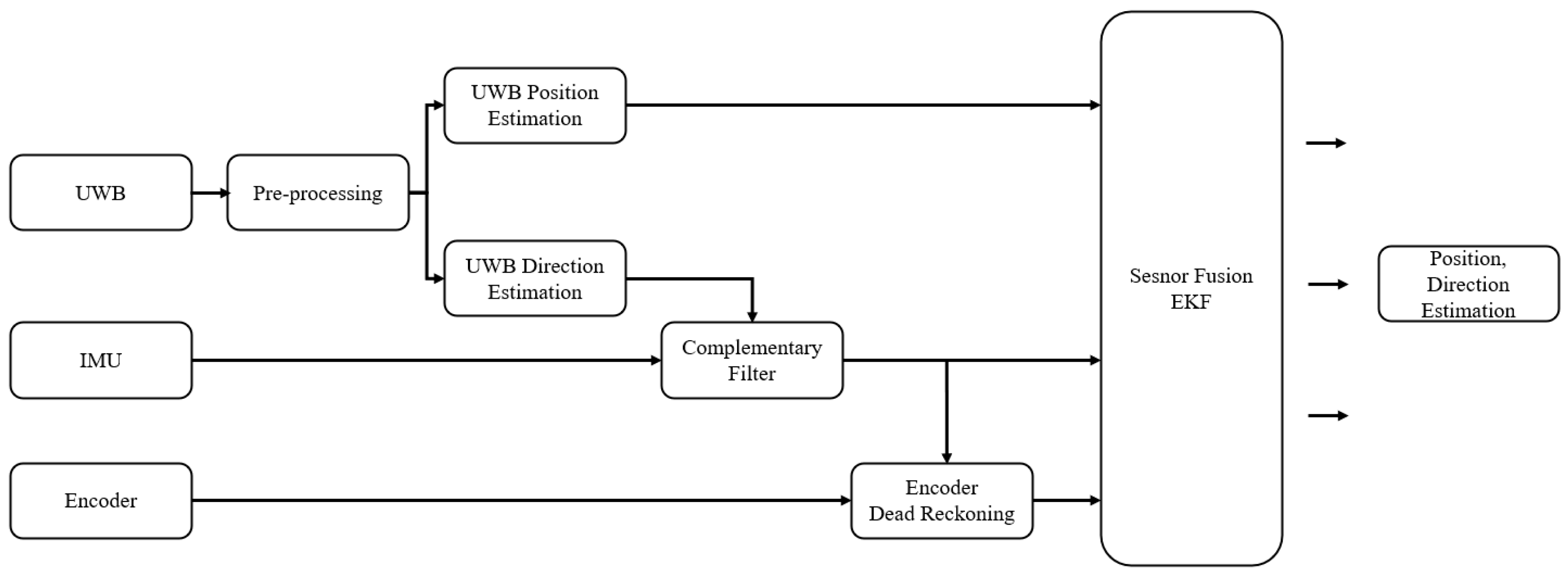
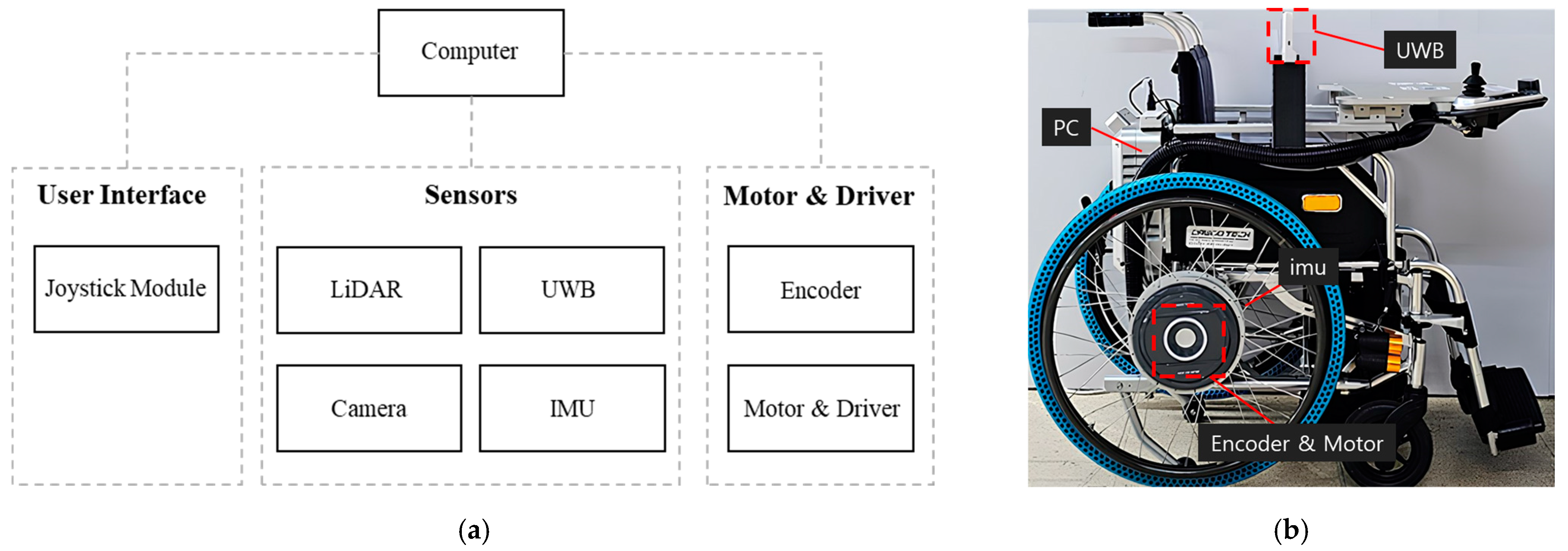
The single UWB sensor-based position and direction estimation method has difficulty correcting data distortion caused by obstacles during driving, and delays occur when noise is strongly suppressed to increase the accuracy. For this reason, it is difficult to use as a driving assistance system, and in the case of dead reckoning such as IMU/encoder, it generates data in the form of a driving record rather than initial position identification. This makes it difficult to apply it to position and direction estimation because it causes a drift error because of initial position identification and data accumulation. Therefore, this study proposes a system as shown in
Figure 1 in order to perform the position and direction estimation for driving assistance technology development. Noise in the UWB sensor data is removed through the data pre-processing process proposed in this study to suppress strong noise.
The active driving assistance algorithm to the waypoint proposed in this paper requires direction and position information for active driving from the current position of the wheelchair. For this purpose, the yaw value of the IMU sensor data and the direction data from the UWB sensor are combined in the form of a complementary filter to estimate the direction information. The reason for this is that the real-time orientation information estimation of the wheelchair has an error due to the slip of the wheelchair’s encoder information, so the error can be improved by estimating the yaw value of the IMU sensor, and the drift error caused by the yaw integration process can be improved by the position-change amount calculated with the UWB.
The position information estimation can basically use the position value estimated by the UWB sensor. However, the distance error of the UWB sensor system can be improved by installing many sensor nodes, but the type proposed in this paper has an error range of 10~30 cm, and it is difficult to estimate the change according to the amount of instantaneous rotation of the wheelchair, so we propose a method to update the distance information to the waypoint by fusing the change amount of the IMU sensor and the encoder sensor attached to the wheelchair with the EKF algorithm.
Among the methods for fusing sensor data, the complementary filter-based sensor fusion, AI-based sensor data fusion method, Kalman filter, and particle filter-based sensor data fusion method are representatively used [
34,
35,
36,
37]. In the case of complementary filters, sensors are fused through mutual compensation between each data source, and they are utilized when the characteristics of each sensor are clear. AI-based sensor fusion mainly designs neural networks by learning from large amounts of data when it is difficult to define the characteristics of data collected from sensors [
38]. Therefore, they are effective in deriving results through probabilistic decisions based on large databases, mainly in object recognition and estimation or inference with unclear features. However, AI-based fusion methods are computationally intensive when processing data compared to other algorithms and require a lot of data for training. The Kalman filter is a sensor fusion algorithm that fuses each sensor based on a system model and iteratively performs state prediction and measurement updates to estimate results based on real-time sensor data. Particle filters update their measurements by iterating through resampling and prediction based on probability.
Particle filters have the advantage of less computation compared to AI algorithms, but since they perform fusion based on probability, they require a larger amount of sensor data to be resampled compared to the Kalman filter algorithm. The use of particle filters compared to Kalman filters is not suitable for the use of UWB/IMU/encoder sensors in this paper. AI-based sensor fusion methods can be effective, but when the amount of data is small, the relationships among the data are distinct, such as the UWB/IMU/encoder sensor used in this paper, and the modeling is relatively easy to implement, sensor fusion techniques using complementary filters and Kalman filters do not have a large error range compared to AI-based sensor fusion methods. Considering the resources required for the design and computation of both sensor systems, this paper proposes a sensor fusion system using a complementary filter for direction information estimation and a Kalman filter for position information estimation.
Therefore, the fusion in this study was based on the Kalman filter. Since the sensor system to be fused currently has nonlinearity, it should be carried out based on algorithms such as EKF, UKF (unscented Kalman filter), and CKF (cubature Kalman filter), which are expanded Kalman filter algorithms. In this study, sensor fusion was performed through EKF, which is suitable for intelligent wheelchairs with lower computation than CKF and UKF, by evaluating new measurement data to suppress the noise included in the data and correct the result by estimating new results [
39].
2.2.1. UWB-Based Object Estimation Technique
The data collected from the UWB module have high noise and may include strong outlier data due to the influence of multiple paths caused by diffraction, reflection, etc. of radio waves due to unexpected obstacles [
40]. Therefore, data pre-processing is needed to remove noise and outliers for implementing precise UWB sensor-based position estimation. Noise and outliers are removed through the data pre-processing process presented in this study. Then, the position and direction angle are estimated through the position estimation and direction angle estimation algorithm considering the outdoor getting on/off space.
Pre-Processing of UWB Sensor Data
The data collected from the UWB sensor generally include high outliers and strong noise due to the noise generated from the multiple paths caused by diffraction and reflection of radio waves because of obstacles and the intensity of radio reception. Therefore, since the collected UWB sensor data show strong outliers and high noise, errors in the Kalman filter covariance calculation and prediction process can be added to the sensor fusion system through the Kalman filter. For this reason, pre-processing is required. Therefore, various filter theories are used to remove noise from such data, and representative methods include average filter, median filter, and exponential smoothing filter [
41,
42,
43].
The average filter reduces noise through the principle of averaging after data collection, but it is not suitable for use in the pre-processing of the UWB sensor because it calculates the average including the outliers of the UWB sensor. The median filter collects a large number of data and uses intermediate values to remove noise. However, there is a problem that various measured values other than outliers are cancelled as intermediate values because of the nature of the median filter, even though there is a strong advantage in the outliers. In this study, since the UWB sensor was used to estimate the position of a moving wheelchair, the median filter, which may cancel the data obtained during movement, is not suitable for sensor pre-processing. In the case of the exponential smoothing filter, it is a filter that accumulates and calculates the previous value and the current value with a constant index. However, it is not strong against outliers like the previous average filter. In addition, since this is a filter that is calculated by continuously accumulating the previous values, it is affected by outliers and delays in the previous values. Therefore, it is not suitable as a pre-processing process for the UWB sensor.
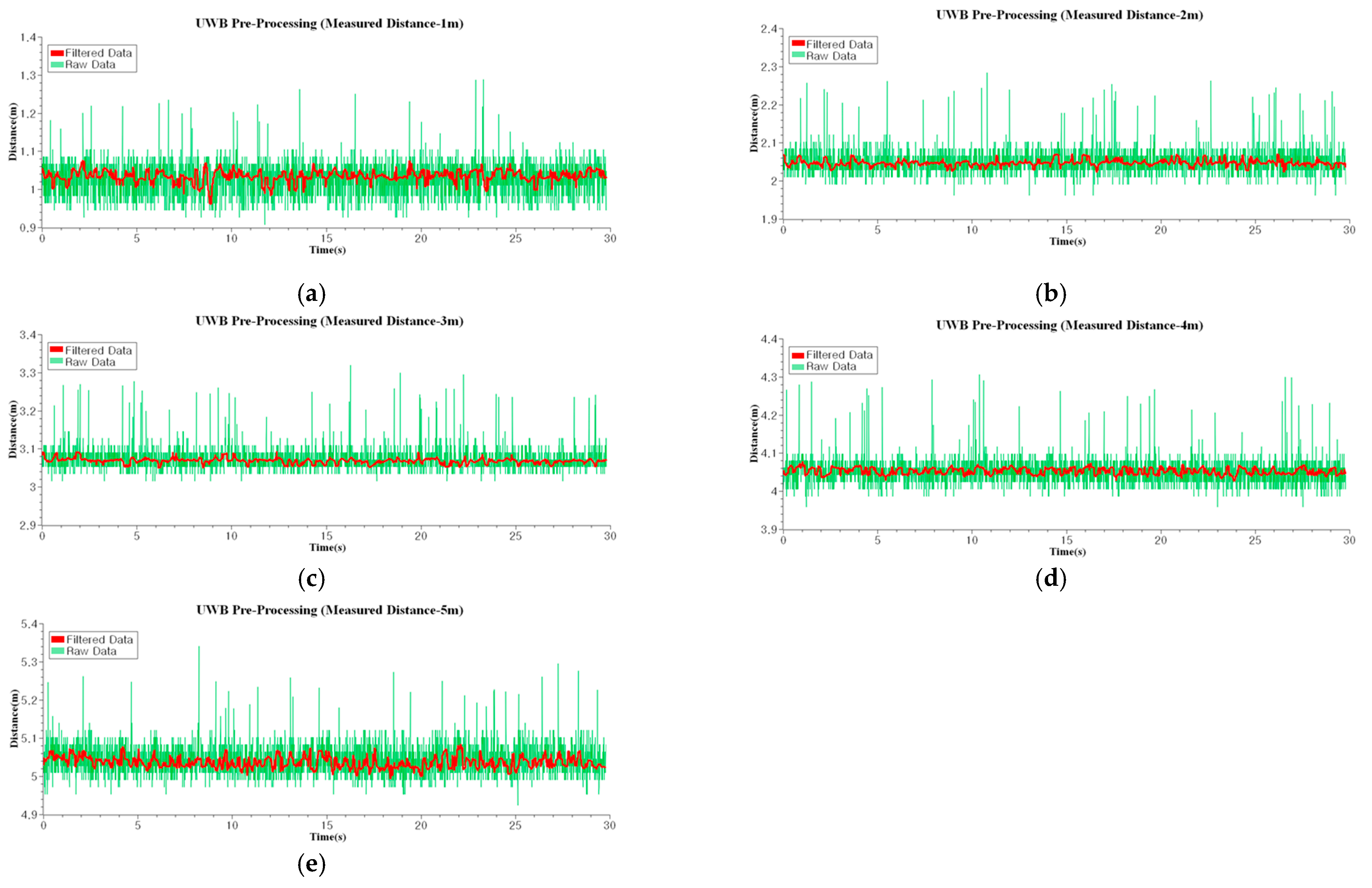
Figure 2 shows the data pre-processing flow chart proposed in this study, and when data are input, the data are first selected and stored based on
with n sizes. Then, the stored data are copied to
to calculate the median value. In order to remove strong outliers and noise in
, data that do not have noise greater than or equal to a weight α in the median value are stored in
. Then, the average is calculated based on the data remaining in
. Therefore, since the average is derived by removing outlier values of a certain value or more after calculating the intermediate value for each data, the disadvantage of the average including outliers of the average filter can be removed and the average of the cancelled value of the median filter can be calculated. For this reason, this study proposes this pre-processing for the UWB sensor data.
UWB Positioning
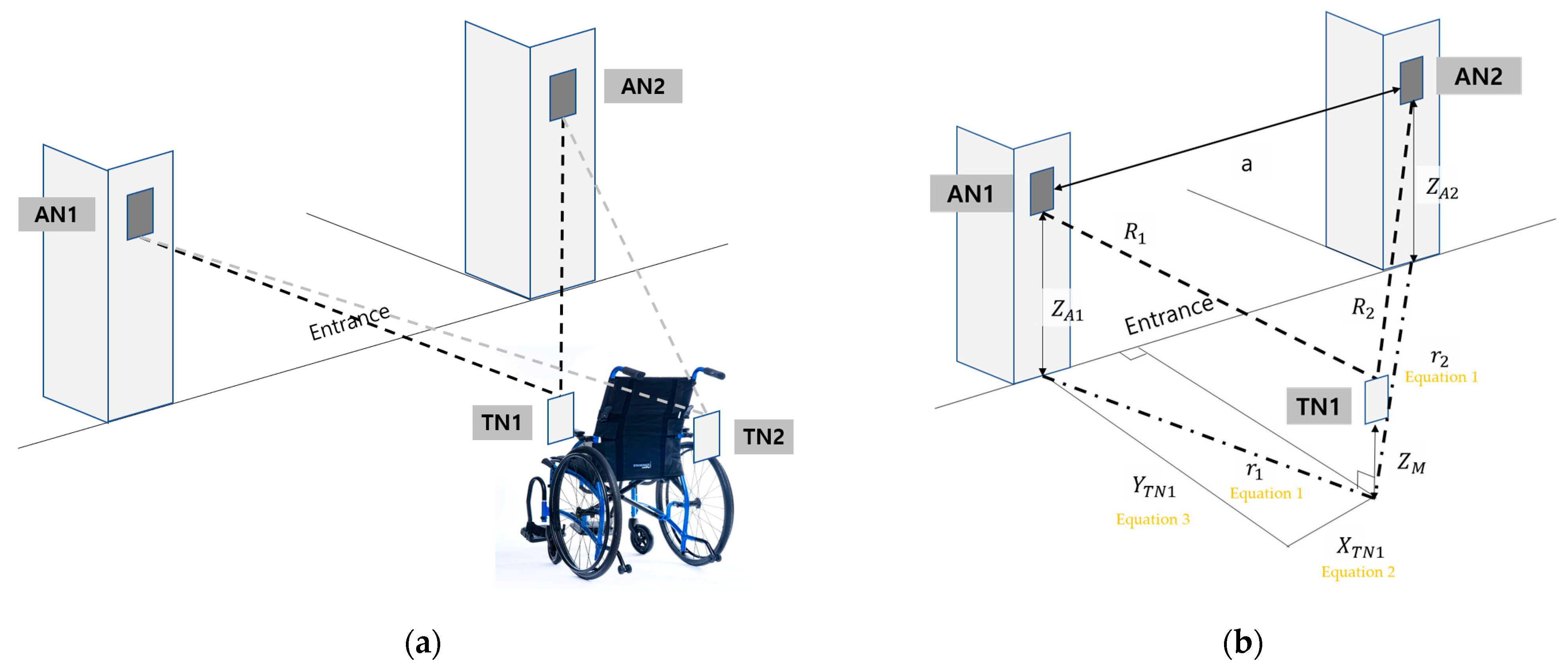
The position estimation system using the UWB sensor basically consists of a number of fixed nodes (ANs, anchor nodes) and mobile nodes (TNs, tag nodes) that identify the installation position accurately. In general, the method of estimating the position using the UWB sensor is implemented using a triangulation method, and three straight distances are required for this. However, since it is difficult to install ANs at both ends of the entrance and exit of the wheelchair getting on/off space, as proposed in this study, the position is estimated by installing two ANs at both ends of the entrance door, as shown in
Figure 3. Therefore, this study proposes a position plan consisting two ANs in consideration of the anchor environment mounted at the entrance of the building under the assumption that the position of the ANs and the position of the TN mounted on the wheelchair are known.
The
in Equation (1) is the distance on the plane and is calculated through the UWB sensor distance
, the height
of AN, and the height
of TN. Equation (2) is the X-coordinate in the plane and Equation (3) is the Y-coordinate in the plane. The coordinates of the wheelchair are calculated based on the obtained TN positions.
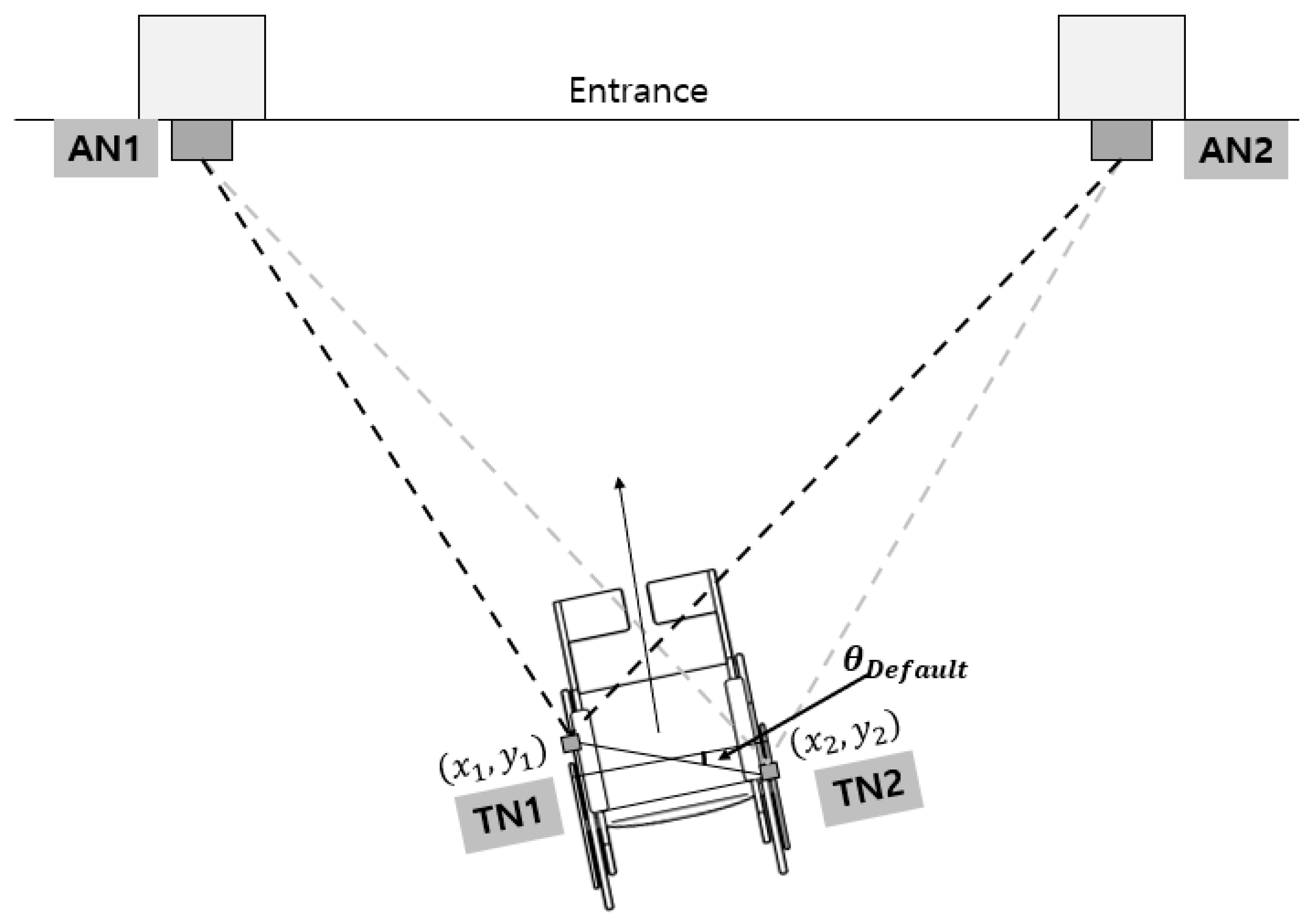
Estimation of the UWB Direction Angle
In order to estimate the direction angle, at least two TNs must exist in a wheelchair, and the direction angle of the wheelchair is estimated based on the position of the TN installed on the wheelchair.
Figure 4 shows the process of estimating the direction angle based on the position of the TN measured from the two ANs mounted at both ends of the entrance.
The relative direction estimation of the wheelchair is performed through Equation (4).
is the UWB angle installed in the existing wheelchair and
is the direction angle of the wheelchair. Through this, the direction angle can be estimated from the UWB sensor.
2.2.2. Dead Reckoning
The position data measured from the UWB sensor show errors when measuring the amount of change in a short distance due to the reception strength of obstacles and radio waves. Therefore, in order to correct the amount of change in such a short distance, the amount of change over time is calculated by performing dead reckoning based on the IMU and encoder sensors, which have the strength of the short-range change. Based on this, this study compensates for the drift error, which is a disadvantage of dead reckoning based on IMU and encoder sensors, using the UWB sensor data. Based on this, this study proposes a method for compensating the short-range error in the UWB sensor data.
IMU Dead Reckoning
The use of the IMU sensor data proposed in this study assumes that the wheelchair moves in the 2D plane and uses only the angular velocity sensor data on the yaw axis instead of the geomagnetic sensor in consideration of the electromagnetic field generated from the motor. Equation (5) shows the calculation of the direction of the wheelchair at time t in the angle change
measured between time
t − 1 and t from the yaw axis angular velocity of the IMU. Therefore, the amount of change in the angle over time can be calculated through the IMU.
Encoder Dead Reckoning
The wheelchair has a wheel structure, and mechanical dead reckoning according to the structure must be performed. Both wheels of the electric wheelchair used in this study are equipped with encoder sensors to measure the rotational speed of the wheel.
Figure 5 shows the process of mechanical modeling of wheeled mobile robots.
The speed and the amount of coordinate changes of the mobile robot are calculated by Equations (6) and (7). Equation (6) calculates the speed of the robot through the velocity
on the right wheel of the robot and
on the left wheel. Equation (7) calculates the X-axis position change,
, and Y-axis position change,
, through the robot direction,
, and the robot speed,
. Based on this, the position change of the robot over time is calculated.
2.3. Proposed Sensor Fusion Technique for Active Driving Assistance
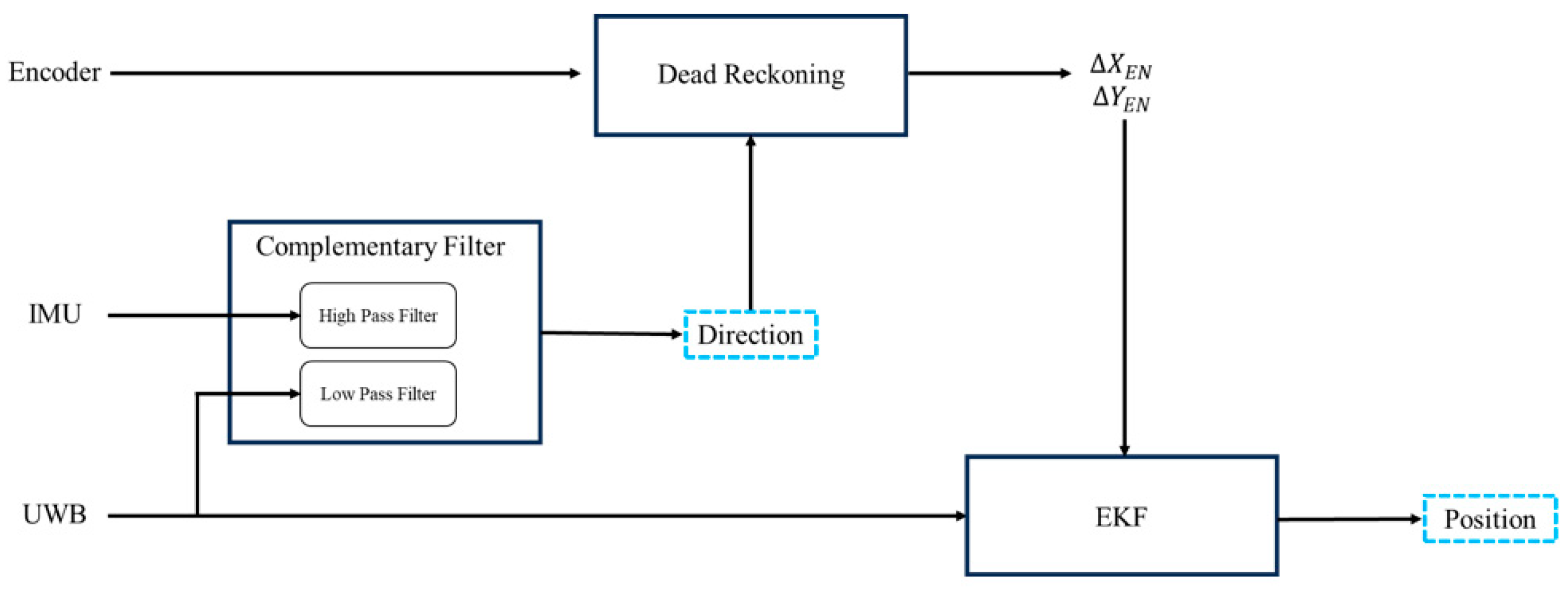
Position estimation using a single UWB sensor results in a strong error due to the obstacles and the reception strength of radio waves. Therefore, the direction also has a strong error in estimating the direction through the position estimated based on the UWB sensor. Since this is difficult to use as a direction estimation for active driving assistance, the direction is estimated with the fusion technology based on the yaw angular velocity data and the direction data calculated from the UWB sensor and complementary filter on the IMU sensor. Based on this, this study proposes an EKF sensor-based fusion method with the UWB sensor-based position estimation data by performing dead reckoning on the encoder sensor.
Figure 6 represents a schematic diagram of the proposed sensor fusion technique for active driving, showing the process of estimating the direction and position using the fusion of UWB/encoder/IMU sensors. The sensor fusion technique for active driving assistance proposed in this study is largely carried out in three processes. First, the direction of the wheelchair is calculated based on the complementary filter. After that, the amount of the wheelchair X-axis position change,
, and the amount of the Y-axis position change,
, are calculated through the calculated direction and encoder sensor data. Finally, the position of the wheelchair is calculated by fusing the calculated position change and the UWB position data.
There are two problems when calculating the angle based on the angular velocity value of the IMU. First of all, since the angle calculated by accumulating the angular velocity as an absolute angle cannot be obtained at present, only the difference between the angle of the starting point and the measurement point can be calculated if the angle of the wheelchair at the starting point is not known. The second is the drift error caused by accumulating angular velocity values to measure the angle [
44]. Therefore, in this study, the angle of the wheelchair calculated from the UWB sensor and the angle of the wheelchair measured from the IMU sensor are fused using Equation (4) in order to solve these two problems. The data measured from the UWB sensor include high noise, but there is no drift error because it is not a cumulative calculation. The acceleration data measured from the IMU sensor have less noise, but drift error occurs. In order to implement the fusion based on the characteristics of these two data types, this study proposes a method using a complementary filter. The complementary filter is usually used when the two data types have mutually secure frequencies, and the UWB sensor data have low-frequency noise, and the angular velocity obtained with the IMU sensor have high-frequency noise. Since each data type is fused through filters of different frequencies using the complementary filter, the UWB and IMU sensor data with different characteristics are fused and utilized. As shown in Equation (8), the UWB sensor data and IMU angular velocity sensor data can be fused. Based on the weight of the complementary filter,
, the angular velocity
measured from UWB and the angular velocity
of the yaw axis measured from IMU are fused to calculate the angle of the current wheelchair,
. Based on this, Equation (7) is implemented to calculate the amount of
and Y-axis position change,
, of the wheelchair.
EKF is an algorithm that calculates the covariance of sensors through past and new measurement data and estimates the results by fusing each sensor according to the system model. This is often used to calculate estimates by fusing sensor data based on data that are difficult to measure precisely due to a lot of noise from each sensor and supplementing the shortcomings of each sensor [
45]. Therefore, EKF is used in this study to remove noise included in the data and estimate the result of fusing the sensors.
The sensor fusion algorithm presented in this study estimates the position and direction of the wheelchair by fusing the amount of real-time position data, and , previously calculated by the encoder sensor; the direction, , calculated by fusing the angle data measured from the IMU and UWB sensors using a complementary filter; and the positions and calculated from the UWB sensor.
Equation (9) is a step of predicting the position and direction of time t in the system model A for considering a wheeled mobile robot system and calculates the predicted value
of time t based on the estimated value
of time
t − 1. Equation (10) is a process of obtaining
, which is an error covariance prediction value of time t, based on the system noise Q and system model A based on the error covariance
estimated at time
t − 1. Equation (11) is a process of calculating the Kalman gain
, a coefficient that determines how much sensor measurements are to be reflected based on the measurement matrix H, sensor noise R, and error covariance P. Equation (12) is the final estimation value and calculates an estimated value by multiplying the value measured with the UWB and IMU sensors by the Kalman gain K. Equation (13) is a process of estimating and reflecting the current error covariance based on the calculated Kalman gain and prediction error covariance.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}