
Study on Elevator Recognition Techniques for Upper-Limb-Disabled Wheelchair Users

Abstract
:1. Introduction
2. Materials and Methods
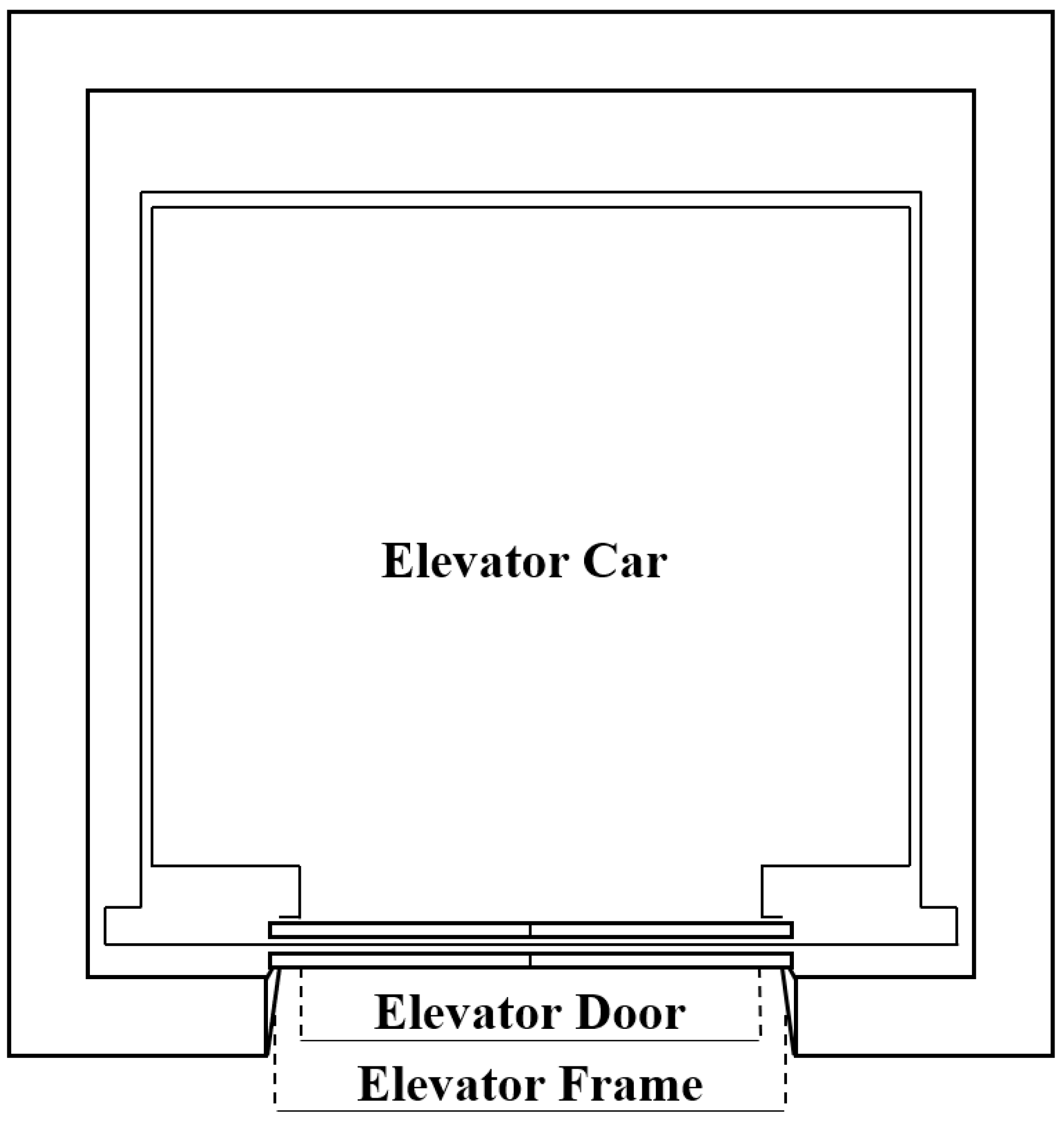
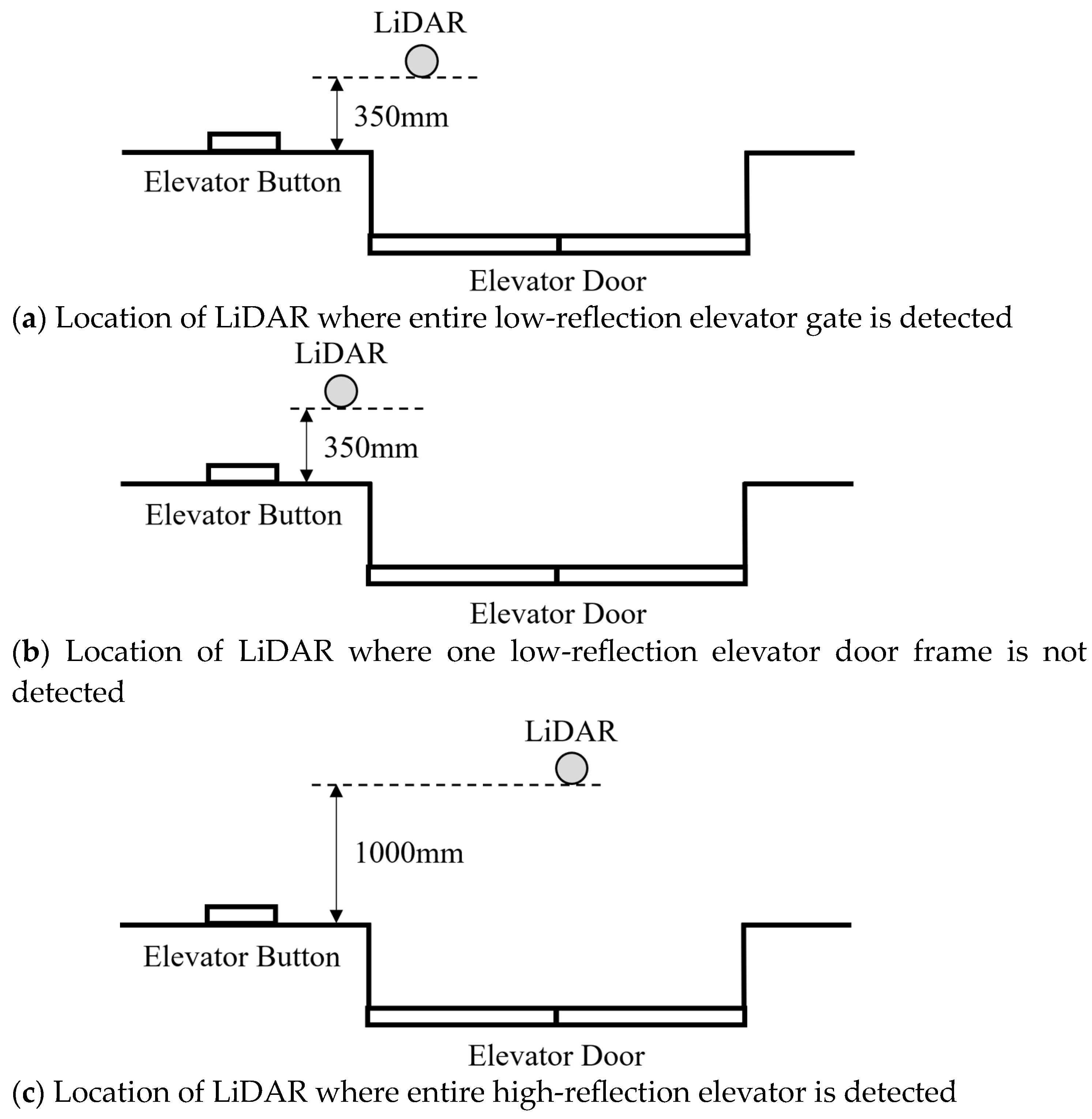
2.1. Elevator Analysis
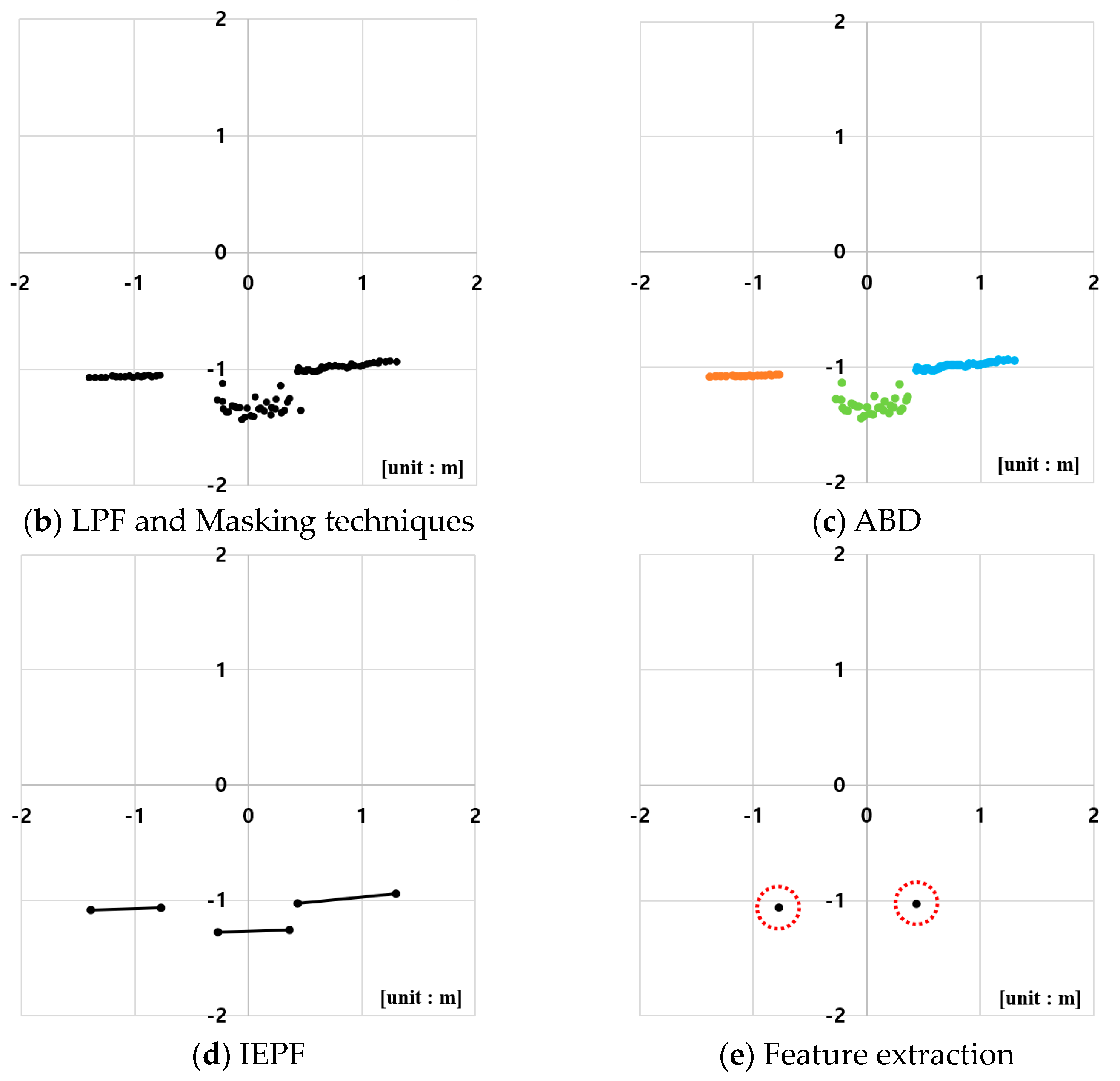
2.2. LiDAR-Sensor-Based Gate Structure Shape Recognition Method
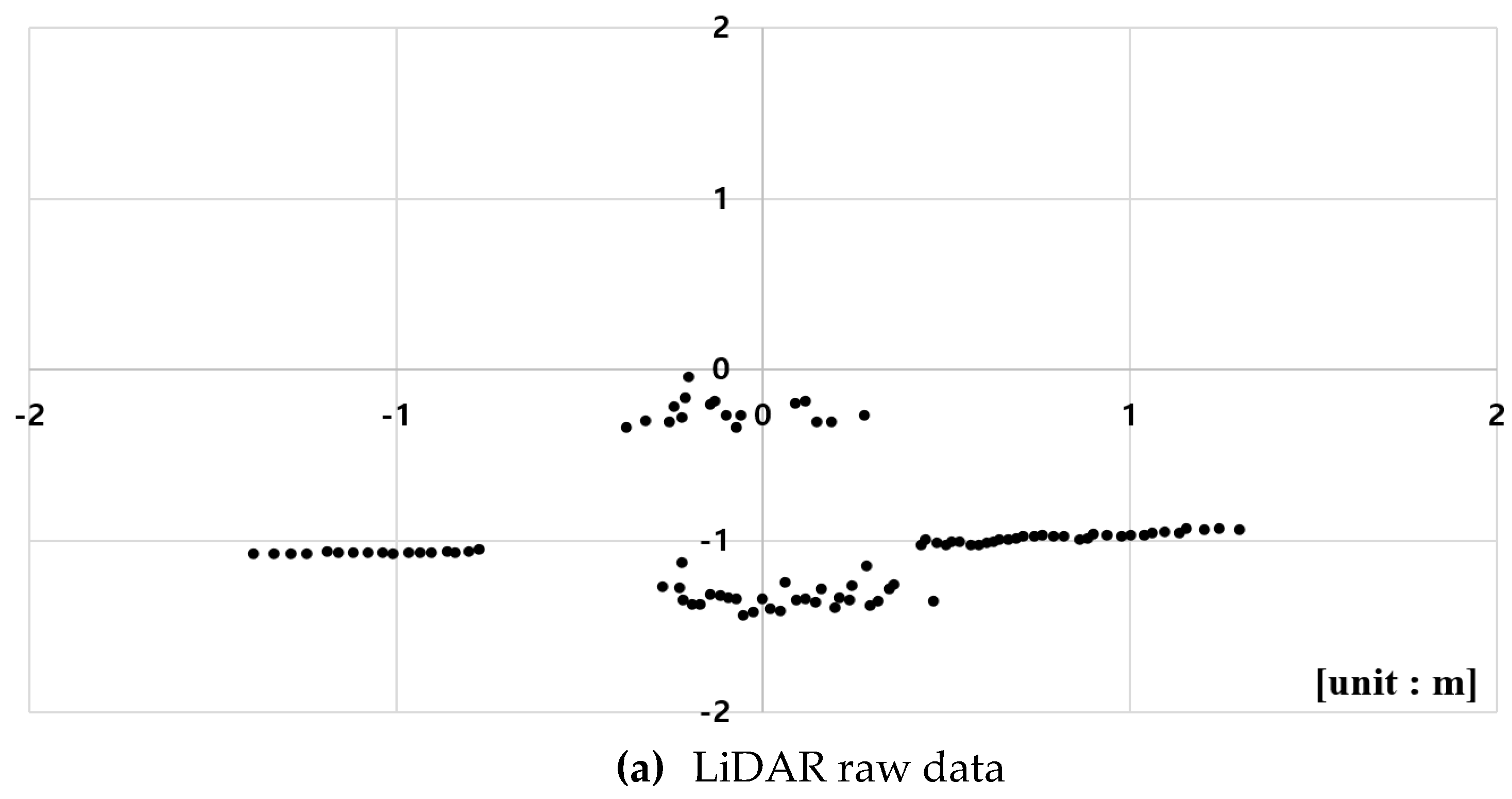
2.2.1. Filtering to Improve Elevator Recognition Rate
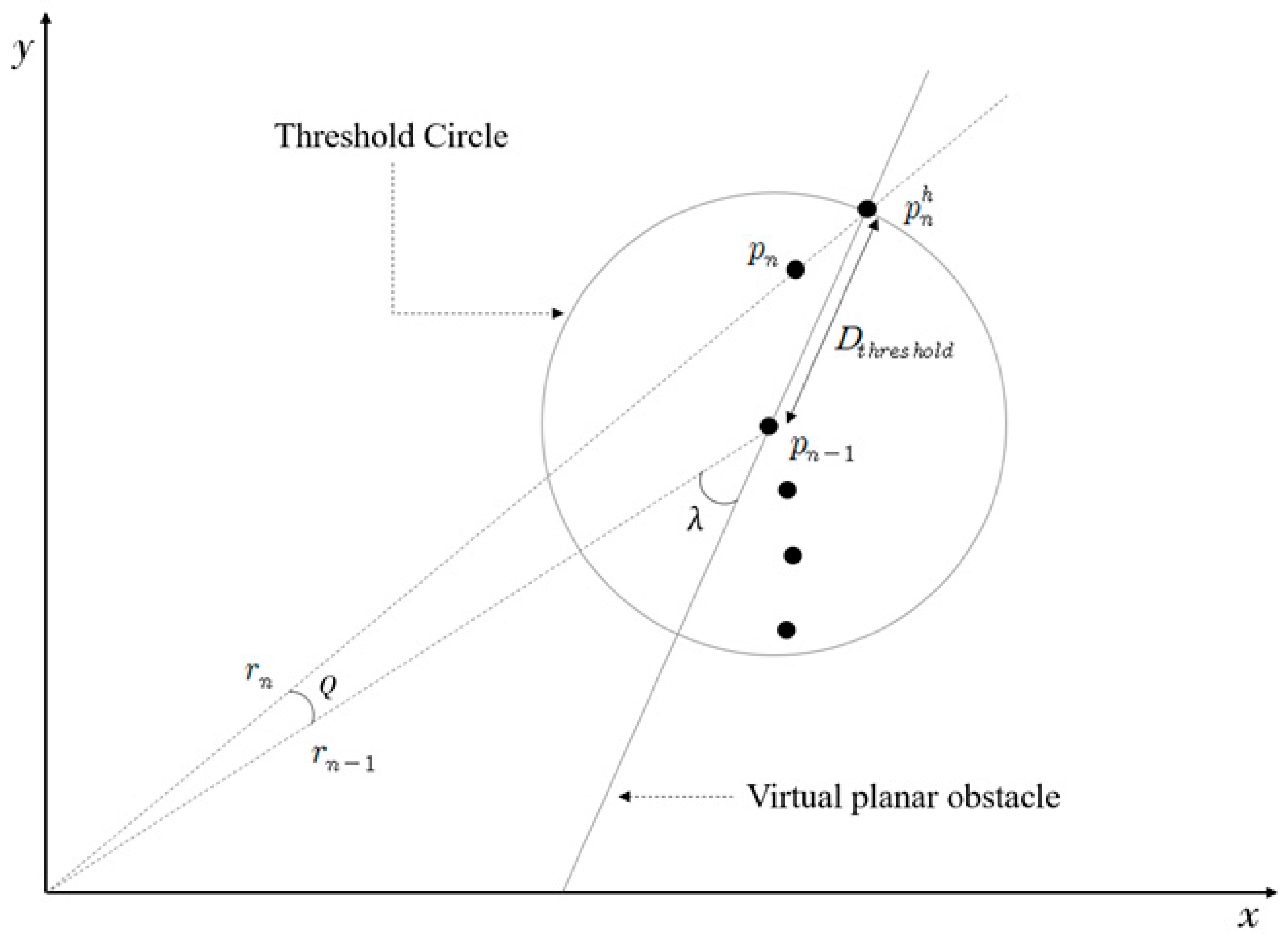
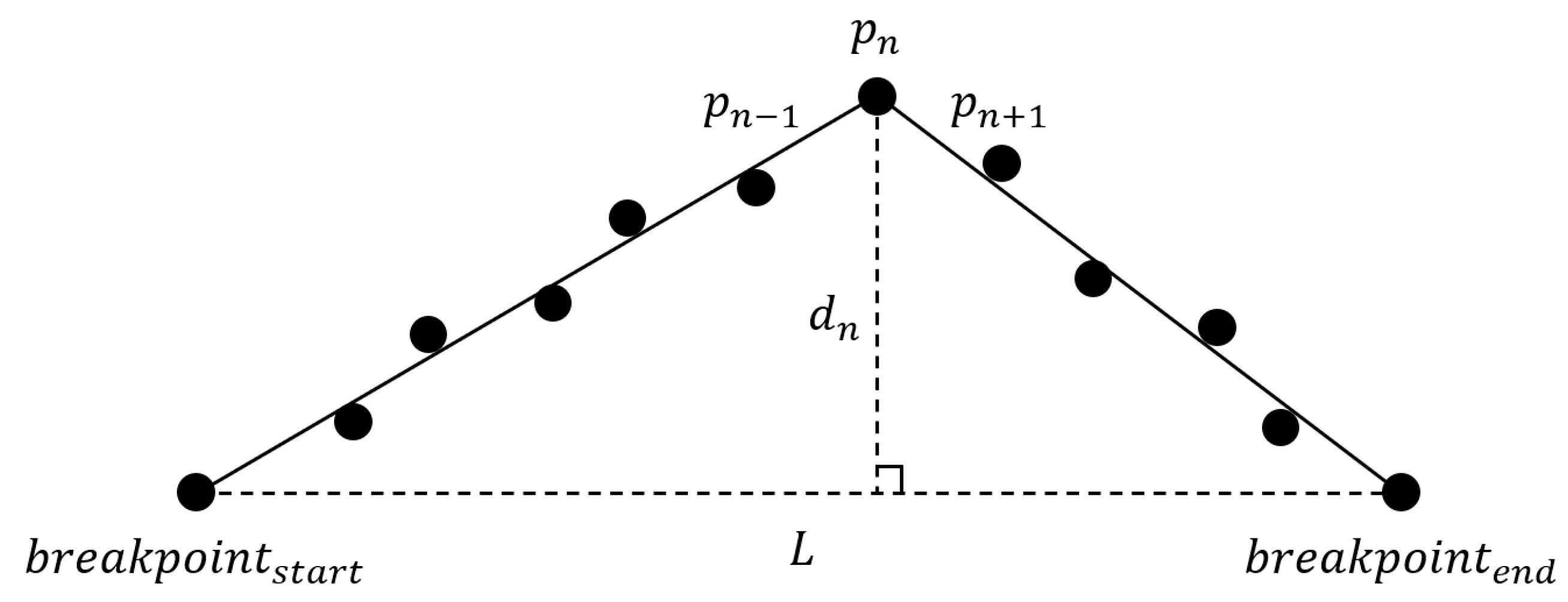
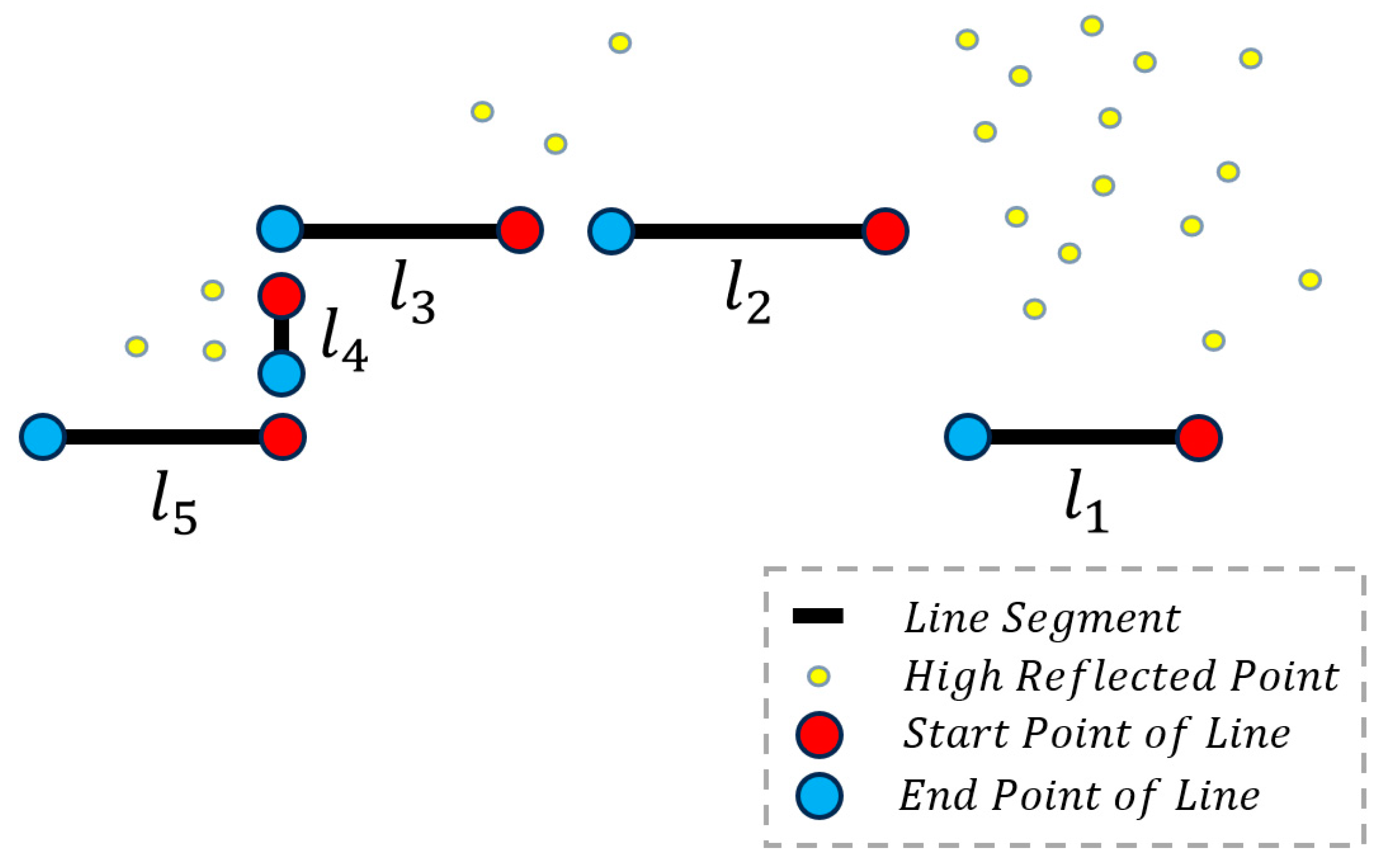
2.2.2. Clustering and Line Segment Extraction Techniques for the Recognition of Gate Structure Shapes
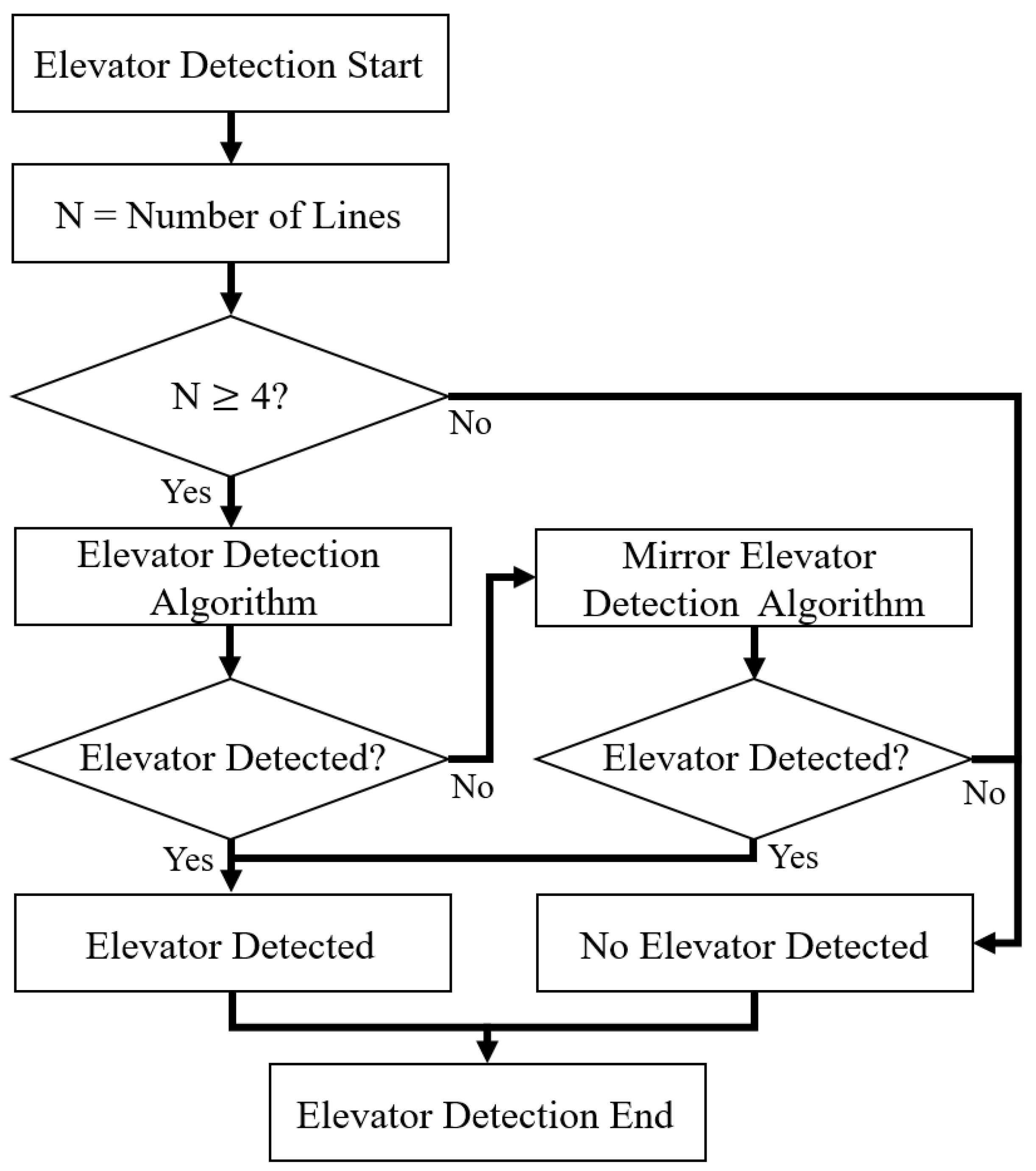
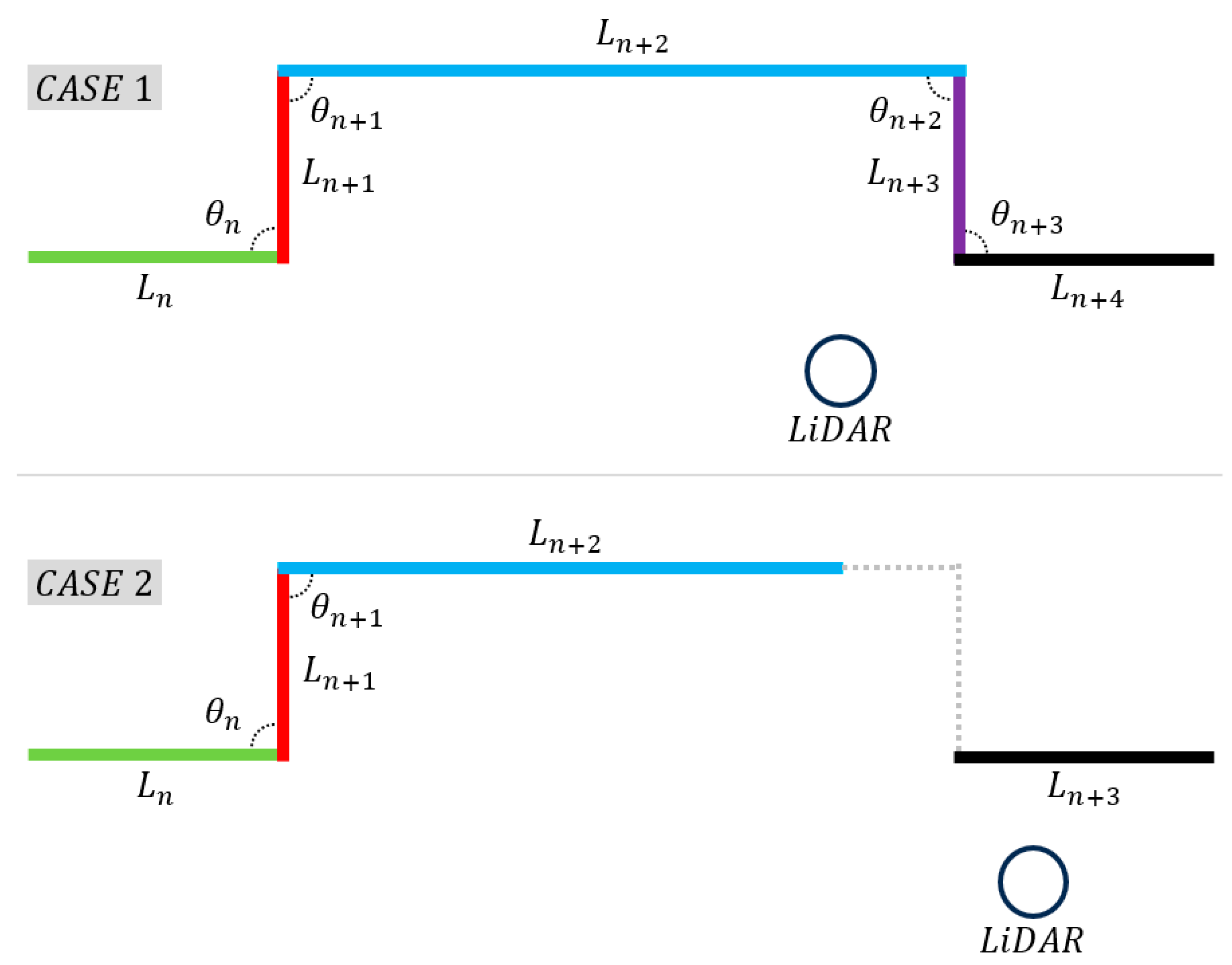
2.2.3. Elevator Feature Point-Based Recognition Method
| Algorithm 1. Elevator Detection |
| Notation |
| Detect ( { |
| for i from 1 to 4 |
| if is within the threshold degree: |
| n = n + 1 |
| if i is 1 or 3: |
| if is within the |
| else return |
| end if |
| if i is 4: |
| coordinates = ( |
| flag = true |
| break |
| end if |
| if is within the : |
| else break |
| end if |
| else if i is 3: |
| if an angle between is within |
| if an angle between is within |
| coordinates = () |
| flag = true |
| end for |
| if flag is true |
| if coordinates distance satisfy elevator width |
| return coordinates |
| end if |
| } |
3. Results
3.1. Experimental Environment and H/W Configuration
3.1.1. Experimental Environment
3.1.2. H/W Configuration
3.2. Experimental Results
3.2.1. Results of the Low-Reflective Material Elevator Gate Recognition Experiment
3.2.2. Results of the High-Reflective Material Gate Recognition Experiment
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Disability. Available online: https://www.who.int/news-room/fact-sheets/detail/disability-and-health (accessed on 22 October 2023).
- Shin, H.D.; Ahn, D.H.; Lee, H.A.; Lee, Y.K.; Yang, H.S.; Jo, M.; Lee, S.B.N.; Park, G.S.; Hwang, Y.S.; Sim, W.S.; et al. Customized Power Wheelchair Joysticks Made by Three-Dimensional Printing Technology: A Pilot Study on the Environmental Adaptation Effects for Severe Quadriplegia. Int. J. Environ. Res. Public Health 2021, 18, 7464. [Google Scholar] [CrossRef] [PubMed]
- Boninger, M. The Manual Wheelchair: What the SCI Consumer Needs to Know; The University of Washington Model Systems Knowledge Translation Center (UW MSKTC): Seattle, WA, USA, 2011. [Google Scholar]
- Boninger, M. The Power Wheelchair: What the SCI Consumer Needs to Know; The University of Washington Model Systems Knowledge Translation Center (UW MSKTC): Seattle, WA, USA, 2011. [Google Scholar]
- World Health Organization. Fact Sheet on Wheelchairs; Technical Report; World Health Organization: Geneva, Switzerland, 2010. [Google Scholar]
- Choi, S.W.; Woo, J.H.; Hyun, S.Y.; Jang, J.H.; Choi, W.S. Factors associated with injury severity among users of powered mobility devices. Clin. Exp. Emerg. Med. 2021, 8, 103–110. [Google Scholar] [CrossRef] [PubMed]
- Ohara, E.; Watanabe, T.; Oishi, T.; Aoki, T.; Nishimoto, Y.; Yano, K. Assistance control of wheelchair operation using active cast for the upper limb. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2223–2228. [Google Scholar]
- Kim, J.H.; Jung, M.K.; Song, J.B. Getting On and Off an Elevator Safely for a Mobile Robot Using RGB-D Sensors. J. Korea Robot. Soc. 2020, 15, 55–61. [Google Scholar] [CrossRef]
- Kim, E.H.; Bae, S.H.; Kuc, T.Y. Mobile service robot multi-floor navigation using visual detection and recognition of elevator features(ICCAS 2020). In Proceedings of the 20th International Conference on Control, Automation and Systems (ICCAS), Busan, Republic of Korea, 13–16 October 2020; pp. 982–985. [Google Scholar]
- Baek, J.Y.; Lee, M.C. A study on detecting elevator entrance door using stereo vision in multi floor environment. In Proceedings of the 2009 ICCAS-SICE, Fukuoka, Japan, 18–21 August 2009; pp. 1370–1373. [Google Scholar]
- Ma, S.W.; Cui, X.; Lee, H.H.; Kim, H.R.; Lee, J.H.; Kim, H.I. Robust Elevator Door Recognition using LRF and Camera. J. Inst. Control Robot. Syst. 2012, 18, 601–607. [Google Scholar] [CrossRef]
- Huang, Y.; Wen, Q.; Dong, S. Elevator door state detection method based on semantic segmentation. In Proceedings of the 6th International Symposium on Computer and Information Processing Technology (ISCIPT), Changsha, China, 11–13 June 2021; pp. 109–112. [Google Scholar]
- Liang, S.; Niu, D.; Huang, K.; Wu, H.; Ding, L.; Yang, Y. An elevator door blocking behavior recognition method based on two-stage object detection networks. In Proceedings of the 2022 37th Youth Academic Annual Conference of Chinese Association of Automation (YAC), Beijing, China, 19–20 November 2022; pp. 1374–1378. [Google Scholar]
- Troniak, D.M.; Sattar, J.; Gupta, A.; Little, J.; Chan, W.P.; Calisgan, E.; Croft, E.A.; Loos, H.F. Charlie rides the elevator—integrating vision, navigation and manipulation towards multi-floor robot locomotion. In Proceedings of the 2013 International Conference on Computer and Robot Vision, Regina, SK, Canada, 28–31 May 2013; pp. 1–8. [Google Scholar]
- Amano, R.; Takahashi, K.; Cho, T.; Kobayashi, K.; Watanabe, K.; Kurihara, Y. Development of automatic elevator navigation algorithm for JAUS compliant mobile robot. In Proceedings of the 6th International Conference on Soft Computing and Intelligent Systems, and the 13th International Symposium on Advanced Intelligence Systems, Kobe, Japan, 20–24 November 2012; pp. 1633–1638. Available online: https://ieeexplore.ieee.org/document/6505165 (accessed on 6 November 2023).
- What Is the Difference Between Front Wheel Drive, Mid Wheel Drive, and Rear Wheel Drive Wheelchairs? Available online: https://hub.permobil.com/blog/difference-between-fwd-mwd-rwd (accessed on 22 October 2023).
- Front Wheel, Mid Wheel or Rear Wheel Drive. Available online: https://www.electricwheelchairsusa.com/blogs/news/front-wheel-mid-wheel-or-rear-wheel-drive (accessed on 22 October 2023).
- Unveiling the Precision of Lidar Mapping: How Accurate Is It Really? Available online: https://www.aerial-precision.com/blog/exploring-the-precision-of-lidar-mapping-unveiling-its-accuracy (accessed on 22 October 2023).
- Korea Legislation Research Institute. Elevator Safety Management Act. Available online: https://elaw.klri.re.kr/kor_service/lawView.do?hseq=62388&lang=ENG (accessed on 22 October 2023).
- Borges, G.A.; Aldon, M.J. Line Extraction in 2D Range Images for Mobile Robotics. J. Intell. Robot. Syst. 2004, 40, 267–297. [Google Scholar] [CrossRef]
- Duan, J.; Valentyna, A. Road edge detection based on LIDAR laser. In Proceedings of the 2015 International Conference on Control, Automation and Information Sciences (ICCAIS), Changshu, China, 29–31 October 2015; pp. 137–142. [Google Scholar]
- Hu, W.; Zhang, K.; Shao, L.; Lin, Q.; Hua, Y.; Qin, J. Clustering Denoising of 2D LiDAR Scanning in Indoor Environment Based on Keyframe Extraction. Sensors 2023, 23, 18. [Google Scholar] [CrossRef] [PubMed]
- Deng, X.S.; Tang, G.; Wang, Q.Y. A novel fast classification filtering algorithm for LiDAR point clouds based on small grid density clustering. Geod. Geodyn. 2022, 13, 38–49. [Google Scholar] [CrossRef]
- Duan, J.; Shi, L.; Yao, J.; Liu, D.; Tian, Q. Obstacle detection research based on four-line laser radar in vehicle. In Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, 12–14 December 2013; pp. 2452–2457. [Google Scholar]
- Nguyen, V.; Martinelli, A.; Tomatis, N.; Siegwart, R. A comparison of line extraction algorithms using 2D laser rangefinder for indoor mobile robotics. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems 2005, Edmonton, AB, Canada, 2–6 August 2005; pp. 1929–1934. [Google Scholar]
- Zhang, L.; Ghosh, B.K. Line segment based map building and localization using 2D laser rangefinder. In Proceedings of the 2000 ICRA. Millennium Conference, IEEE International Conference on Robotics and Automation. Symposia Proceedings, San Francisco, CA, USA, 24–28 April 2000; Volume 3, pp. 2538–2543. [Google Scholar]
- Vandorpe, J.; Van Brussel, H.; Xu, H. Exact dynamic map building for a mobile robot using geometrical primitives produced by a 2D range finder. Proceedings of IEEE International Conference on Robotics and Automation, Minneapolis, MN, USA, 22–28 April 1996; Volume 1, pp. 901–908. [Google Scholar]
- Korea Legislation Research Institute. Act on The Guarantee of Convenience Promotion of Persons With Disabilities, Senior Citizens, Pregnant Women And Nursing Mothers. Available online: https://elaw.klri.re.kr/kor_service/lawView.do?hseq=57346&lang=ENG (accessed on 22 October 2023).
- Chen, W.H. Disturbance Observer Based Control for Nonlinear System. IEEE/ASME Trans. Mechatron. 2004, 9, 706–710. [Google Scholar] [CrossRef]
- Chen, W.H.; Yang, J.; Guo, L.; Li, S. Disturbance-Observer-Based Control and Related Methods: An Overview. IEEE Trans. Ind. Electron. 2015, 63, 1083–1095. [Google Scholar] [CrossRef]
- ISO 7176-5:2008; Determination of Dimensions, Mass and Manoeuvring Space. International Organization for Standardization: Geneva, Switzerland, 2008. Available online: https://www.iso.org/standard/46429.html (accessed on 22 October 2023).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | RPLiDAR-A2 |
|---|---|
| Distance range | 0.15–6 m |
| Angular range | 0–360 degrees |
| Angular resolution | 0.9 degree |
| Scan rate | 10 Hz |
| Distance error rate | <1% of the distance |
| Number of Experiments, Repeated 30 Times | ||||
|---|---|---|---|---|
| Elevator Type | Reflection [%] | Correctness | Precision [cm] | |
| TruePositive (TP) [%] | FalsePositive (FP) [%] | |||
| Low-reflection elevator | 51.3 | 80.0 | 10.0 | ≤6.11 |
| High-reflection elevator | 94.2 | 73.3 | 6.7 | ≤5.81 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, D.; Eom, S.-H.; Lee, E.-H. Study on Elevator Recognition Techniques for Upper-Limb-Disabled Wheelchair Users. Appl. Sci. 2023, 13, 12182. https://doi.org/10.3390/app132212182
Kim D, Eom S-H, Lee E-H. Study on Elevator Recognition Techniques for Upper-Limb-Disabled Wheelchair Users. Applied Sciences. 2023; 13(22):12182. https://doi.org/10.3390/app132212182
Chicago/Turabian StyleKim, Daewe, Su-Hong Eom, and Eung-Hyuk Lee. 2023. "Study on Elevator Recognition Techniques for Upper-Limb-Disabled Wheelchair Users" Applied Sciences 13, no. 22: 12182. https://doi.org/10.3390/app132212182
APA StyleKim, D., Eom, S.-H., & Lee, E.-H. (2023). Study on Elevator Recognition Techniques for Upper-Limb-Disabled Wheelchair Users. Applied Sciences, 13(22), 12182. https://doi.org/10.3390/app132212182