
A Fault Diagnosis Method for a Missile Air Data System Based on Unscented Kalman Filter and Inception V3 Methods



Abstract
1. Introduction
- (1)
- Based on the idea of integrating model and data methods, after establishing the unscented Kalman filter model for the air data system, data that reflect fault information, including innovations and residual sequences, were extracted and input into the neural network. This approach effectively overcomes the limitations of model-based and data-based methods, allowing faults to be diagnosed more easily and accurately.
- (2)
- A neural network model for fault diagnosis based on Inception V3 architecture was constructed, incorporating the lightweight attention mechanism known as ECA. Compared to traditional neural networks, this network is able to learn features of data at multiple scales and in a selective manner while ensuring higher computational efficiency and requiring fewer computational resources.
2. Problem Description
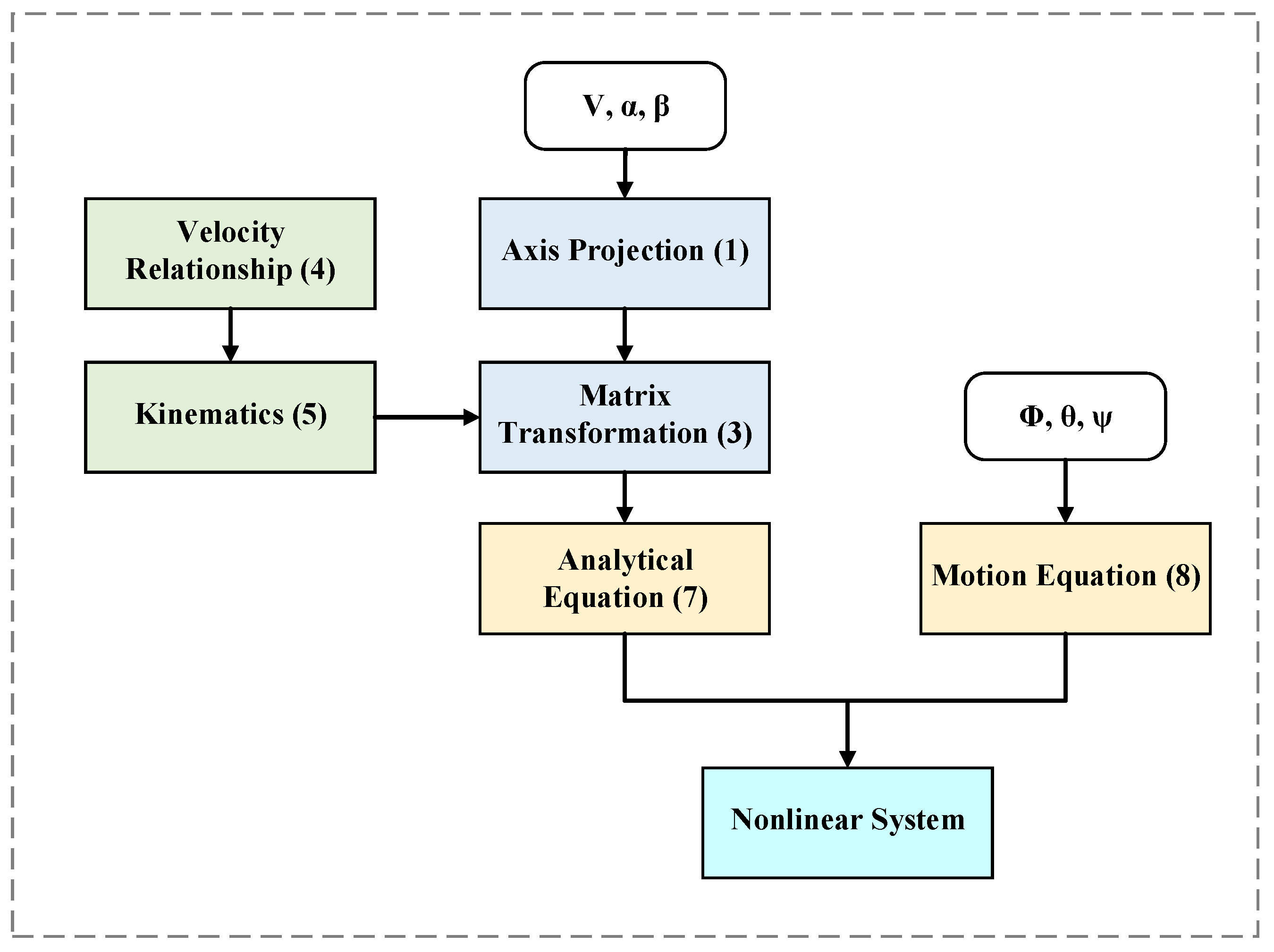
2.1. ADS Model
2.2. Problem Description
- (1)
- Compared to integrated navigation systems, like INS/GPS, the ADS model is difficult to describe analytically, and conventional modeling methods cannot accurately capture the characteristics of the system. Furthermore, due to the high speed and high maneuverability of missiles, there are many uncertainties, like unstable vortices during flight, which reduce the reliability of hypothesis testing-based methods in the diagnostic stage.
- (2)
- The sensors of an ADS are located on the surface of the missile and confronted with harsh environmental conditions, which exacerbates the interference and makes it difficult to diagnose minor faults. Additionally, missiles operate in uncertain conditions during different combat missions, such as multiple trajectories. The data from various flight states often exhibit significant variations. Conventional data-based fault diagnosis strategies may not be able to differentiate between changes in atmospheric parameters caused by variations in flight states and those caused by other factors, like faults, and obtaining data under all possible scenarios in advance is impractical, which limits their applicability to ADSs.
3. Proposed Method
3.1. State Estimation Based on the UKF
- (1)
- Compute the sigma point set:
- (2)
- Compute the prediction of the sigma points and state variables, as well as the error covariance matrix:
- (3)
- Generate a new set of sigma points based on step (2), and substitute them into the measurement equation to compute the predicted measurements , the covariance matrix , and the cross-covariance matrix :
- (4)
- Update the Kalman gain , state, and covariance:
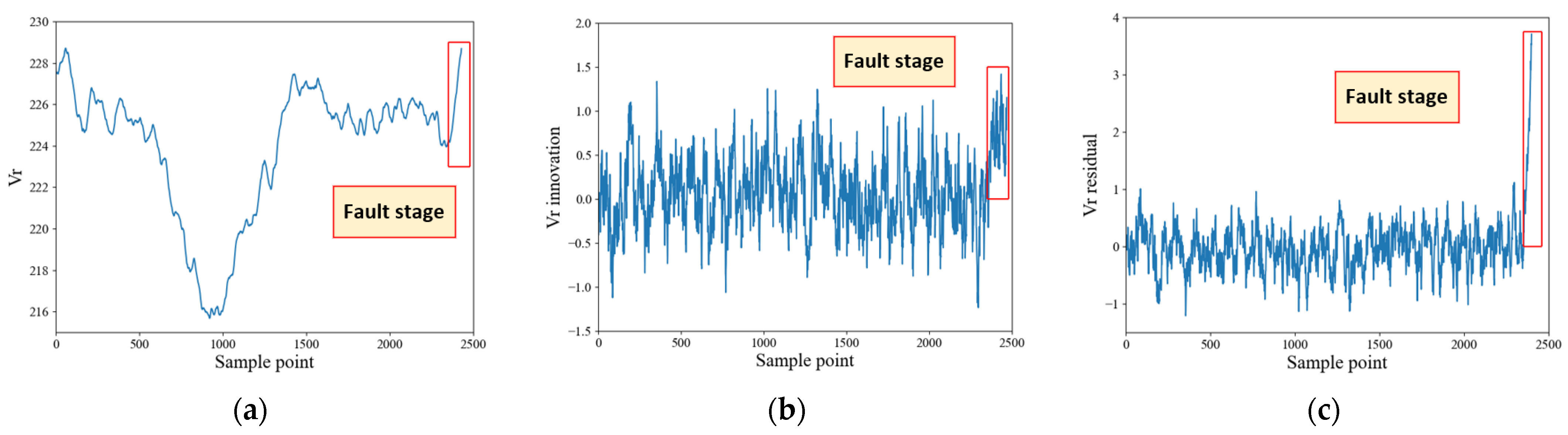
3.2. Fault Feature Selection
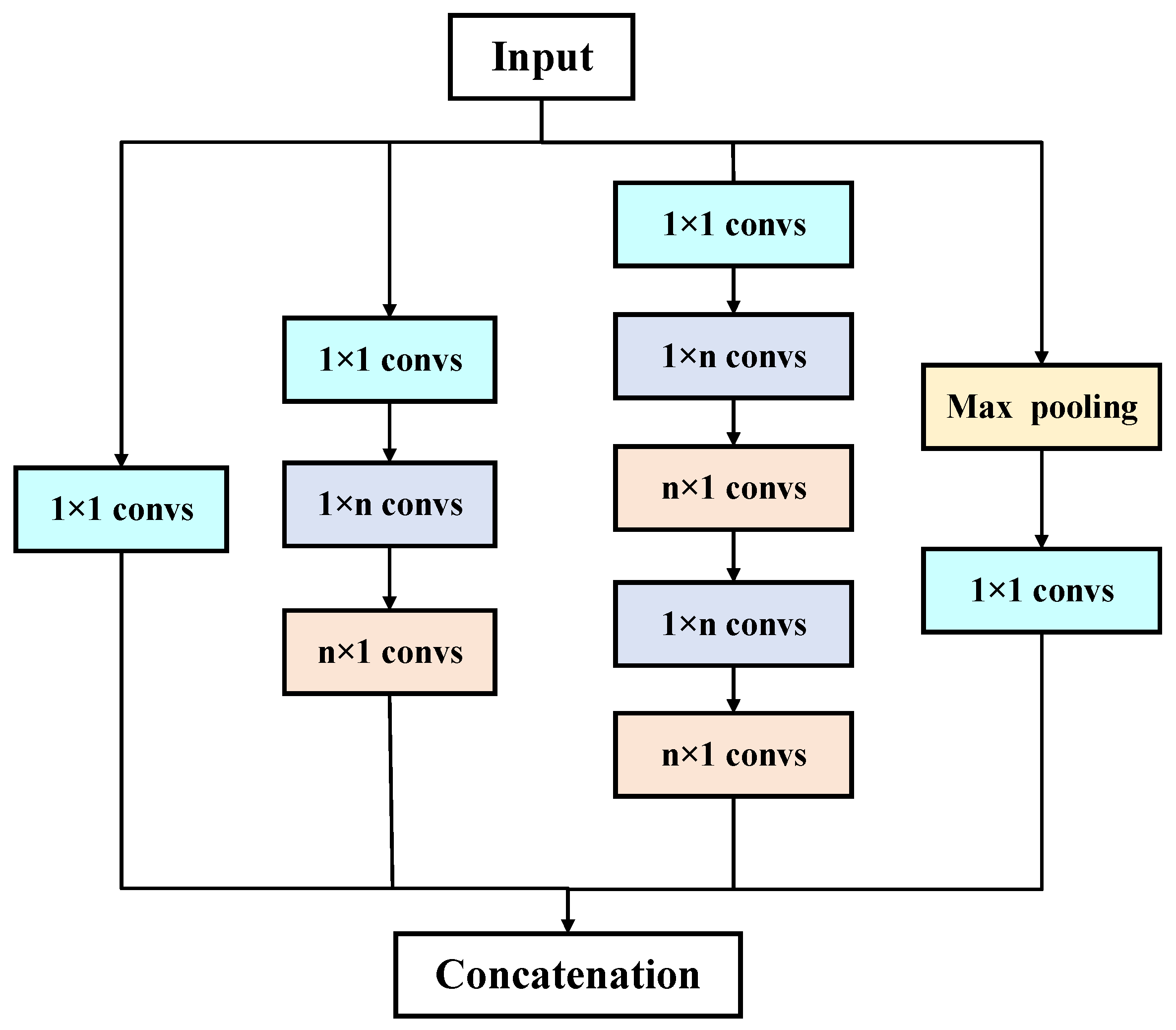
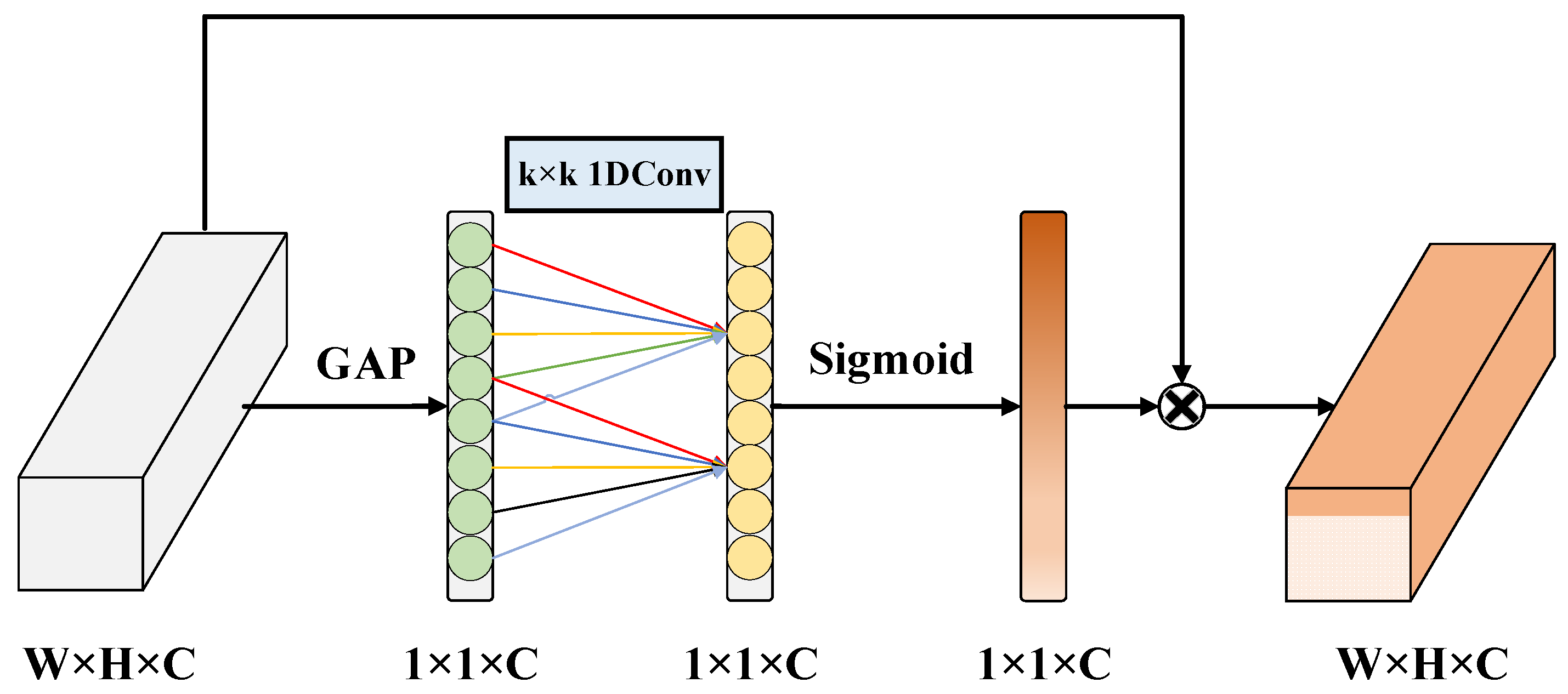
3.3. Inception V3 Fault Diagnosis Network
- (1)
- Pass the input feature map through global average pooling and transform it from a [h, w, c] matrix to a [1, 1, c] vector;
- (2)
- Calculate the size of adaptive one-dimensional convolution kernel size based on the number of channels in the feature map, , and generally set , ;
- (3)
- Apply the kernel size to the one-dimensional convolution to obtain the weights for each channel of the feature map;
- (4)
- Multiply the normalized weights channel-wise with the original input feature map to generate the weighted feature map.
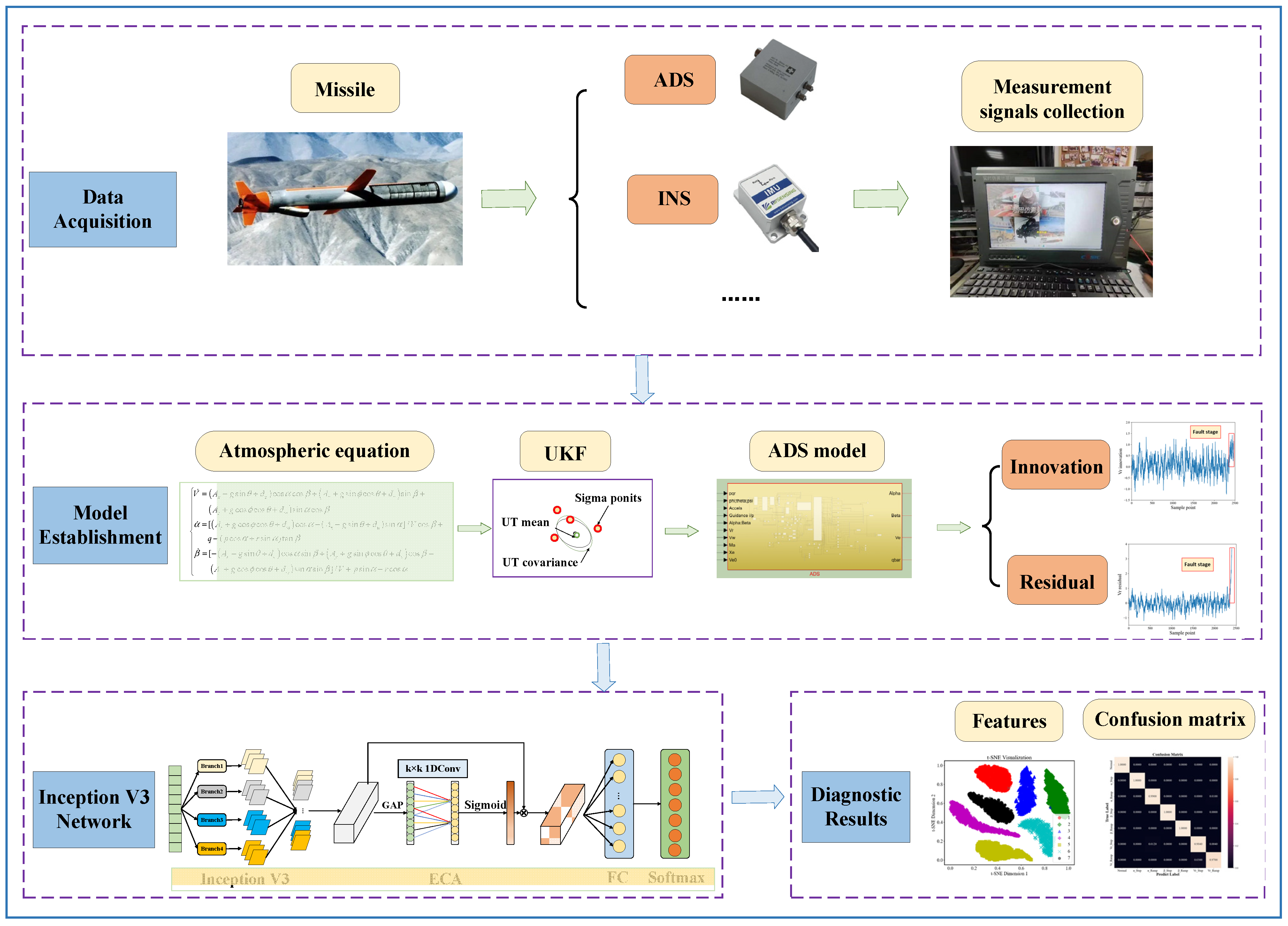
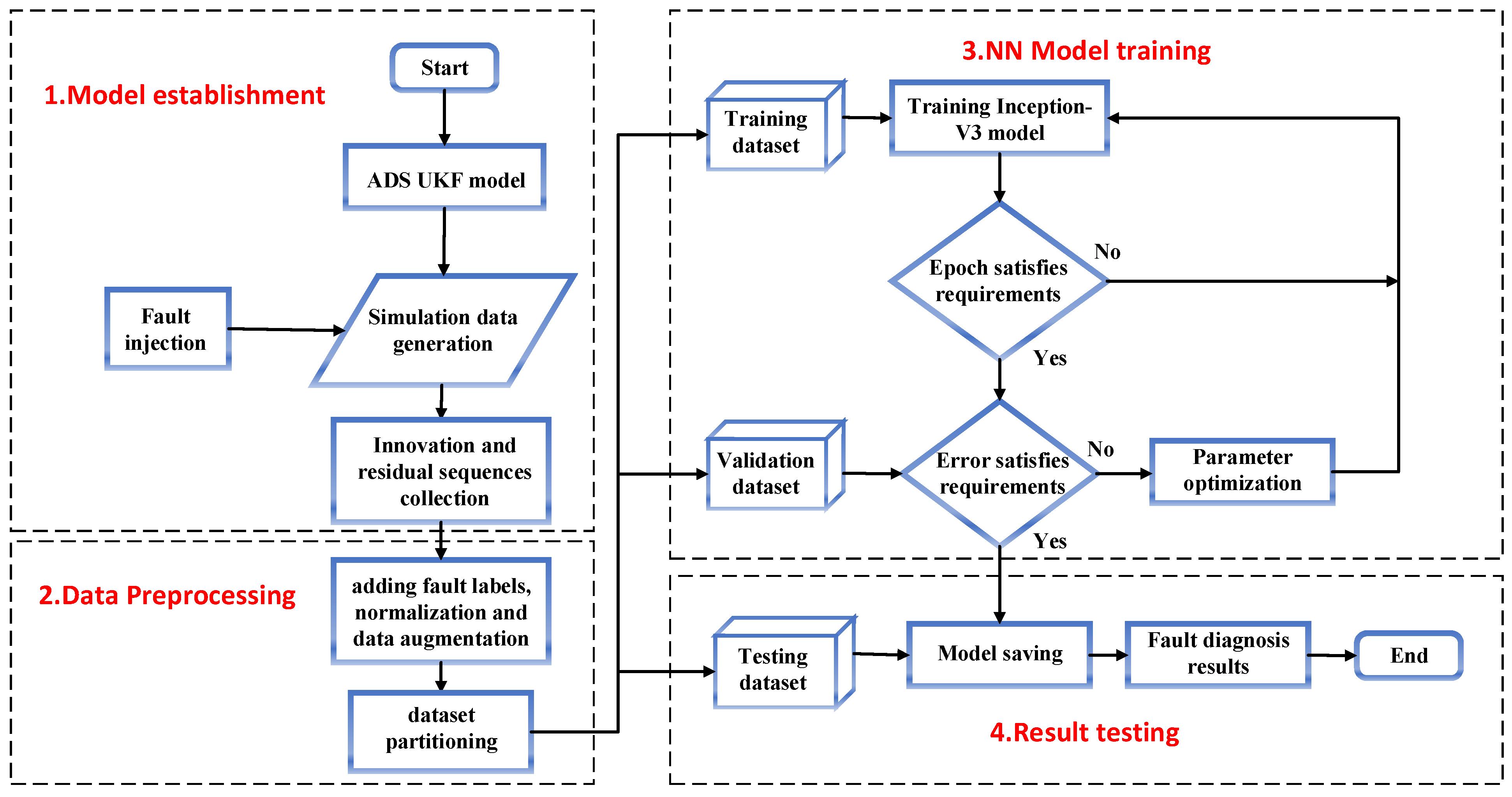
3.4. Overall Process of the Algorithm
- (1)
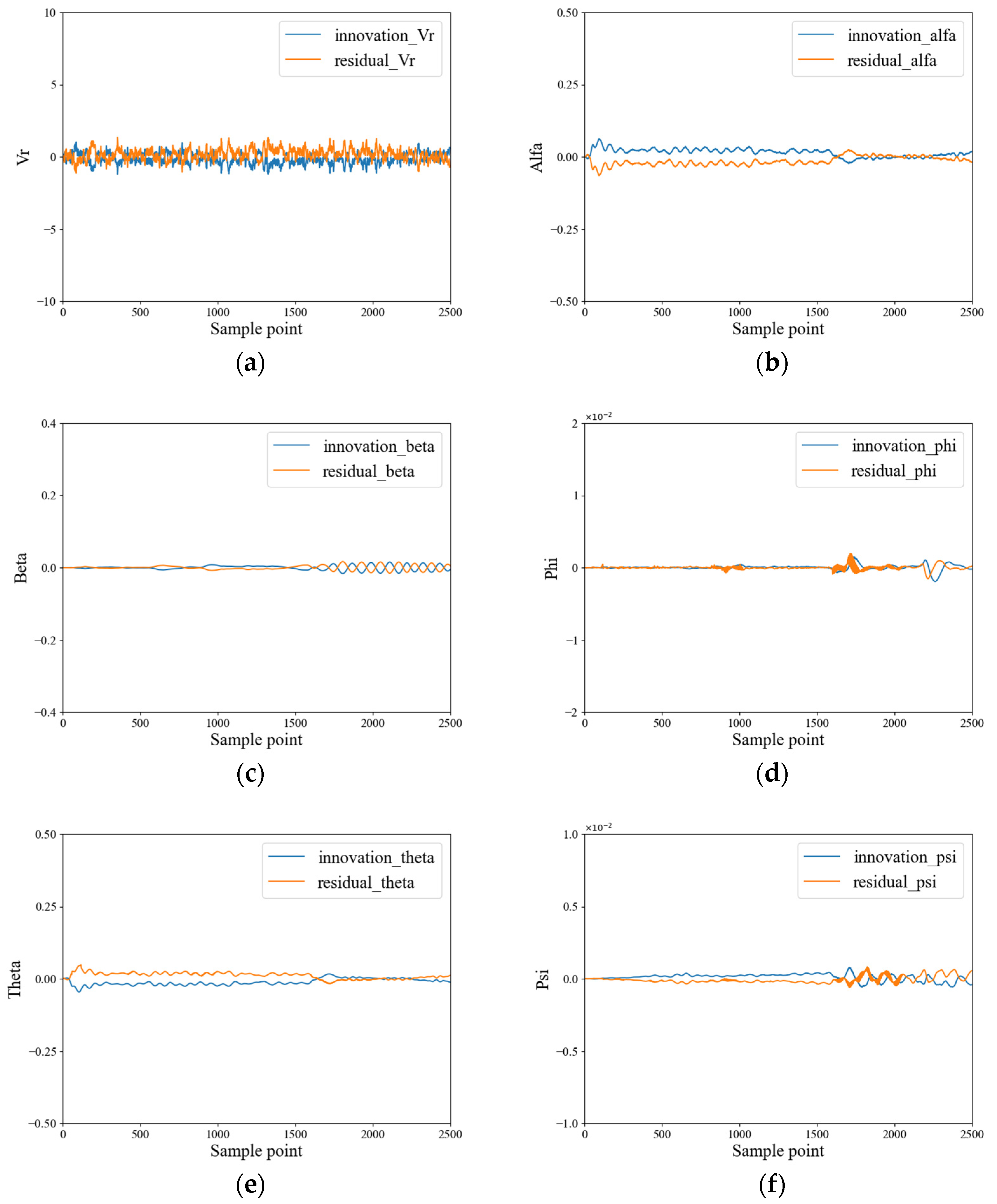
- In the missile simulation model, the UKF model is established for the air data system, and abrupt and gradual faults are injected separately into the measurement sections of each sensor. Then, 12-dimensional innovation and residual sequences are collected under both normal and faulty conditions;
- (2)
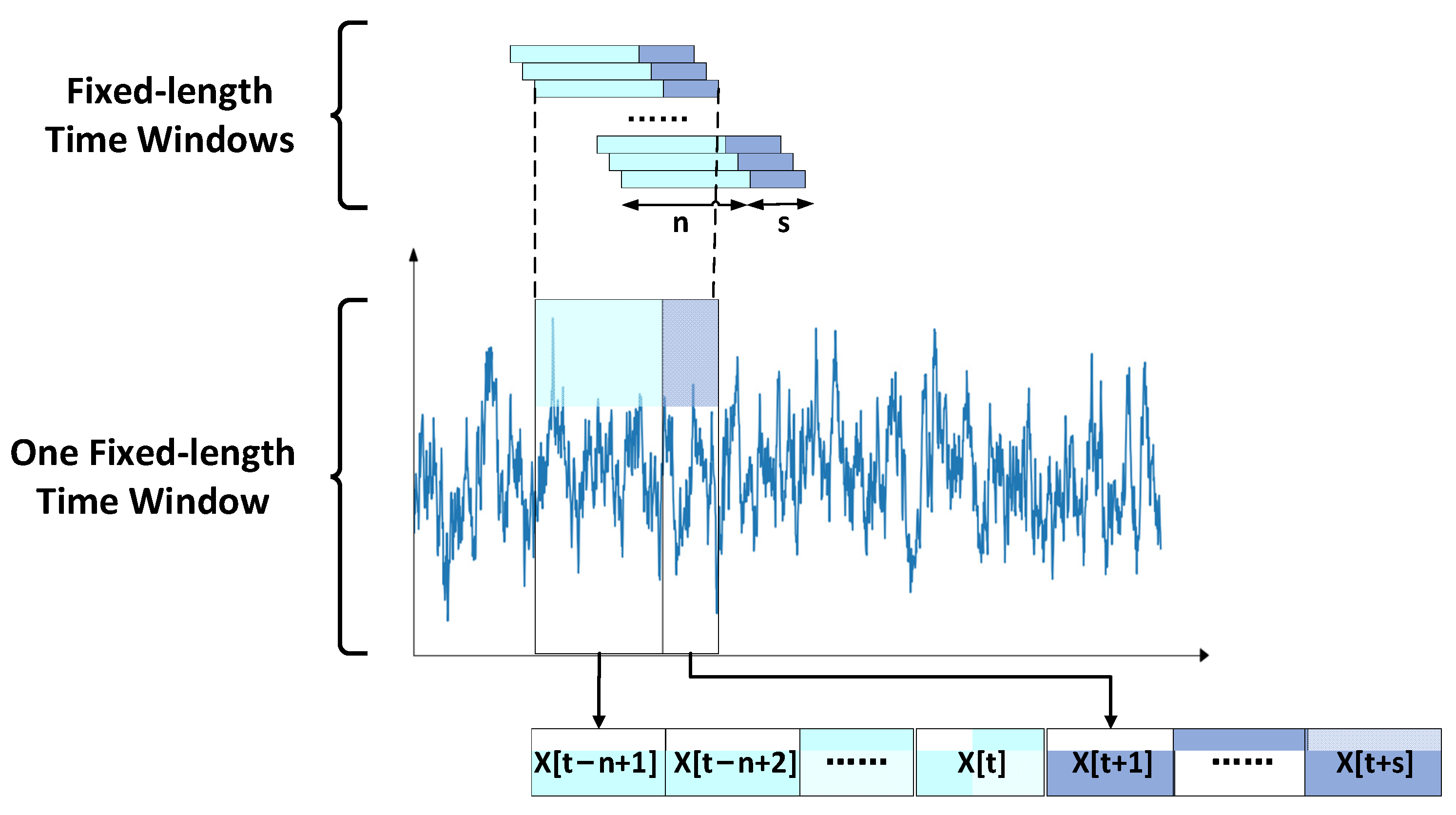
- Preprocess the data, which includes adding fault labels; normalization; partitioning into training, validation, and testing datasets; and data augmentation through sliding windows;
- (3)
- Train the neural network model, where the loss function is chosen as the cross-entropy loss function, and the optimizer is Adam, by which the network parameters are updated during backpropagation;
- (4)
- Set the number of training epochs, and after reaching the desired error value and training epoch, test the model using the testing set and output the diagnostic results.
4. Experimental Validation
4.1. Dataset
4.2. Parameter Settings
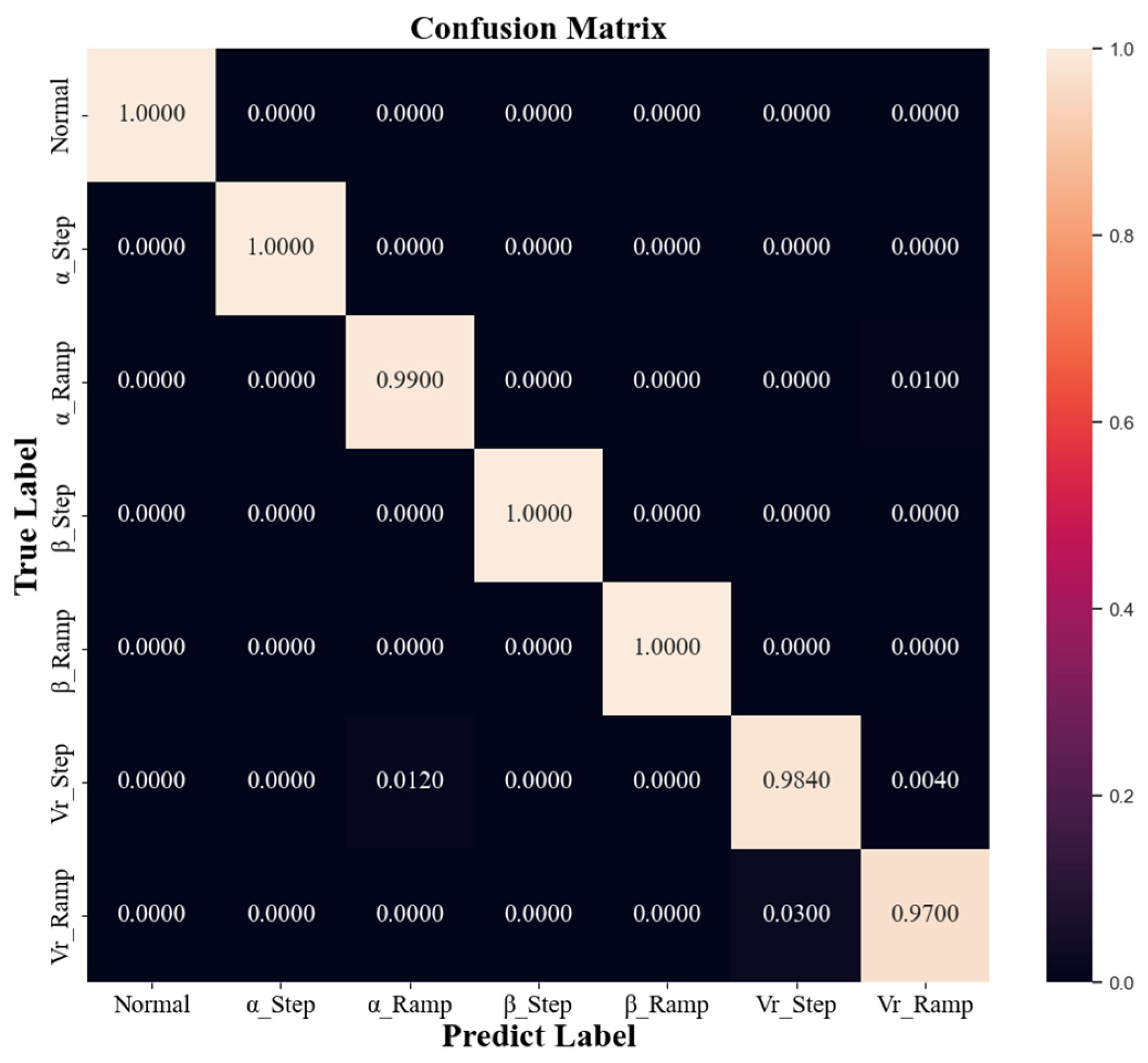
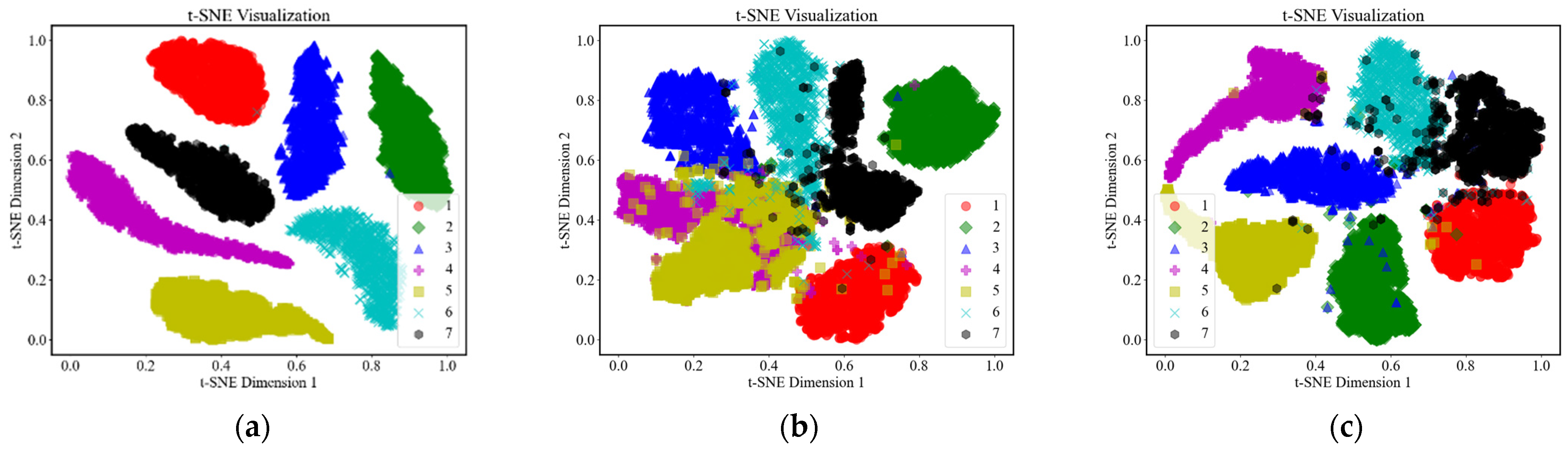
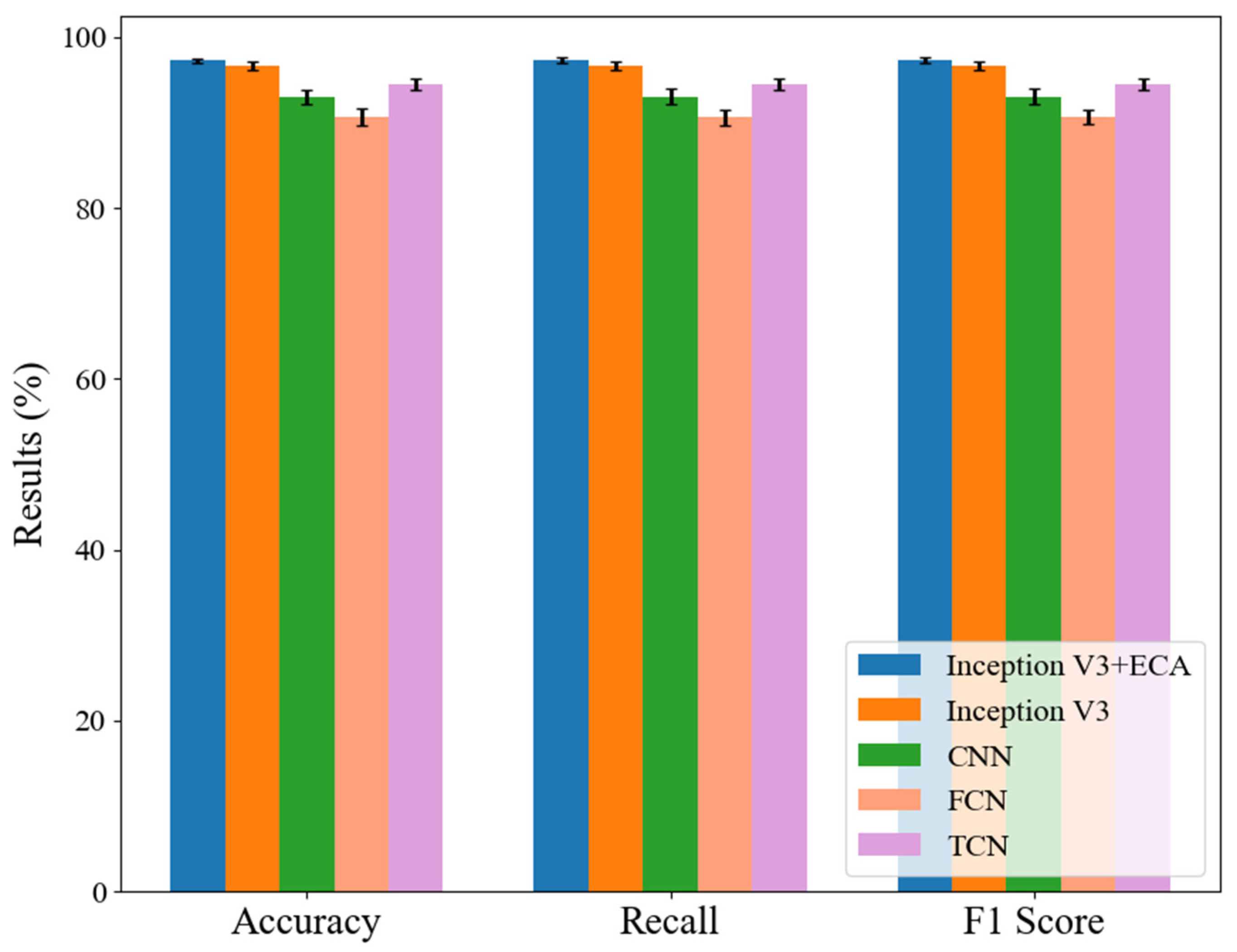
4.3. Results and Analysis
5. Conclusions
- (1)
- Based on the working mechanism of the ADS and the missile kinematic equations, the UKF model of the ADS is established to provide a more accurate description of the system. This avoids the problems of distinguishing faults from changes in flight states that are commonly encountered in purely data-driven methods.
- (2)
- Instead of using hypothesis testing methods, such as chi-squared tests in the diagnostic process, the proposed method extracts innovation and residual sequences from the UKF model to amplify fault features and employs them as inputs to the neural network, which better reflects fault conditions compared to traditional methods based on filtered data or innovation data.
- (3)
- The Inception V3 network is designed, which extracts features in parallel at multiple scales while ensuring high computational efficiency by leveraging the principles of sparse matrices. Additionally, the network incorporates the lightweight ECA attention mechanism to further enhance the diagnostic performance.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nebula, F.; Palumbo, R.; Morani, G. Virtual air data: A fault-tolerant approach against ADS failures. In Proceedings of the AIAA Infotech@ Aerospace (I@ A) Conference, Boston, MA, USA, 19–22 August 2013; p. 4568. [Google Scholar]
- Wan, Y.; Keviczky, T.; Verhaegen, M. Robust air data sensor fault diagnosis with enhanced fault sensitivity using moving horizon estimation. In Proceedings of the 2016 American control conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 5969–5975. [Google Scholar]
- Fravolini, M.L.; Del Core, G.; Papa, U.; Valigi, P.; Napolitano, M.R. Data-driven schemes for robust fault detection of air data system sensors. IEEE Trans. Control. Syst. Technol. 2017, 27, 234–248. [Google Scholar] [CrossRef]
- Houck, D.; Atlas, L. Air data sensor failure detection. In Proceedings of the 17th DASC. AIAA/IEEE/SAE. Digital Avionics Systems Conference, Bellevue, WA, USA, 31 October–7 November 1998; Volume 1, p. D17-1. [Google Scholar]
- Li, D.; Wang, Y.; Wang, J.; Wang, C.; Duan, Y. Recent advances in sensor fault diagnosis: A review. Sens. Actuators A Phys. 2020, 309, 111990. [Google Scholar] [CrossRef]
- Nandi, S.; Toliyat, H.A.; Li, X. Condition monitoring and fault diagnosis of electrical motors—A review. IEEE Trans. Energy Convers. 2005, 20, 719–729. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Liang, D.; Liu, K. Online parameter estimation for permanent magnet synchronous machines: An overview. IEEE Access 2021, 9, 59059–59084. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, C. Wind turbine condition monitoring based on a novel multivariate state estimation technique. Measurement 2021, 168, 108388. [Google Scholar] [CrossRef]
- Song, Y.; Zhong, M.; Xue, T.; Ding, S.X.; Li, W. Parity space-based fault isolation using minimum error minimax probability machine. Control. Eng. Pract. 2020, 95, 104242. [Google Scholar] [CrossRef]
- Guo, D.; Zhong, M.; Zhou, D. Multisensor data-fusion-based approach to airspeed measurement fault detection for unmanned aerial vehicles. IEEE Trans. Instrum. Meas. 2017, 67, 317–327. [Google Scholar] [CrossRef]
- Xiong, H.; Bian, R.; Li, Y.; Du, Z.; Mai, Z. Fault-tolerant GNSS/SINS/DVL/CNS integrated navigation and positioning mechanism based on adaptive information sharing factors. IEEE Syst. J. 2020, 14, 3744–3754. [Google Scholar] [CrossRef]
- Yun, S.H.; Kang, C.W.; Park, C.G. Reducing the computation time in the state chi-square test for IMU fault detection. In Proceedings of the 2014 14th International Conference on Control, Automation and Systems (ICCAS 2014), Gyeonggi-do, Republic of Korea, 22–25 October 2014; pp. 879–883. [Google Scholar]
- Wang, R.; Xiong, Z.; Liu, J.; Xu, J.; Shi, L. Chi-square and SPRT combined fault detection for multisensor navigation. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 1352–1365. [Google Scholar] [CrossRef]
- Wan, Y.; Puig, V.; Ocampo-Martinez, C.; Wang, Y.; Harinath, E.; Braatz, R.D. Fault detection for uncertain LPV systems using probabilistic set-membership parity relation. J. Process Control. 2020, 87, 27–36. [Google Scholar] [CrossRef]
- Blesa, J.; Puig, V.; Saludes, J. Robust identification and fault diagnosis based on uncertain multiple input–multiple output linear parameter varying parity equations and zonotopes. J. Process Control. 2012, 22, 1890–1912. [Google Scholar] [CrossRef]
- Zhong, M.; Song, Y.; Ding, S.X. Parity space-based fault detection for linear discrete time-varying systems with unknown input. Automatica 2015, 59, 120–126. [Google Scholar] [CrossRef]
- Lu, P.; Van Eykeren, L.; Van Kampen, E.; De Visser, C.C.; Chu, Q.P. Adaptive three-step Kalman filter for air data sensor fault detection and diagnosis. J. Guid. Control. Dyn. 2016, 39, 590–604. [Google Scholar] [CrossRef]
- Lu, P.; Van Kampen, E.J.; De Visser, C.; Chu, Q. Air data sensor fault detection and diagnosis in the presence of atmospheric turbulence: Theory and experimental validation with real flight data. IEEE Trans. Control. Syst. Technol. 2020, 29, 2255–2263. [Google Scholar] [CrossRef]
- Freeman, P.; Seiler, P.; Balas, G.J. Air data system fault modeling and detection. Control. Eng. Pract. 2013, 21, 1290–1301. [Google Scholar] [CrossRef]
- Fravolini, M.L.; Napolitano, M.R.; Del Core, G.; Papa, U. Experimental interval models for the robust fault detection of aircraft air data sensors. Control. Eng. Pract. 2018, 78, 196–212. [Google Scholar] [CrossRef]
- Prabhu, S.; Anitha, G. An innovative analytic redundancy approach to air data sensor fault detection. Aeronaut. J. 2020, 124, 346–367. [Google Scholar] [CrossRef]
- Van Eykeren, L.; Chu, Q. Air Data Sensor Fault Detection using Kinematic Relations. In Advances in Aerospace Guidance, Navigation and Control: Selected Papers of the Second CEAS Specialist Conference on Guidance, Navigation and Control; Springer: Berlin/Heidelberg, Germany, 2013; pp. 183–197. [Google Scholar]
- Kalaiarasi, G.; Maheswari, S. Deep proximal support vector machine classifiers for hyperspectral images classification. Neural Comput. Appl. 2021, 33, 13391–13415. [Google Scholar] [CrossRef]
- Yi, H.; Song, X.-F.; Jiang, B.; Liu, Y.-F.; Zhou, Z.-H. Flexible support vector regression and its application to fault detection. Acta Autom. Sin. 2013, 39, 272–284. [Google Scholar] [CrossRef]
- Sun, Y.; Li, S. Bearing fault diagnosis based on optimal convolution neural network. Measurement 2022, 190, 110702. [Google Scholar] [CrossRef]
- Chung, S.; Abbott, L.F. Neural population geometry: An approach for understanding biological and artificial neural networks. Curr. Opin. Neurobiol. 2021, 70, 137–144. [Google Scholar] [CrossRef] [PubMed]
- Chen, M.; Tao, G.; Jiang, B. Dynamic surface control using neural networks for a class of uncertain nonlinear systems with input saturation. IEEE Trans. Neural Netw. Learn. Syst. 2014, 26, 2086–2097. [Google Scholar] [CrossRef]
- Xu, H.; Lian, B. Fault detection for multi-source integrated navigation system using fully convolutional neural network. IET Radar Sonar Navig. 2018, 12, 774–782. [Google Scholar] [CrossRef]
- Xia, S.; Zhou, X.; Shi, H.; Li, S.; Xu, C. A fault diagnosis method based on attention mechanism with application in Qianlong-2 autonomous underwater vehicle. Ocean. Eng. 2021, 233, 109049. [Google Scholar] [CrossRef]
- Wen, X.; Ji, L.; Zhang, X.; Zhao, J. Fault Detection and Diagnosis in the INS/GPS Navigation System; World Automation Congress (WAC): Waikoloa, HI, USA, 2014; pp. 27–32. [Google Scholar]
- Guan, Y.; Meng, Z.; Sun, D.; Liu, J.; Fan, F. 2MNet: Multi-sensor and multi-scale model toward accurate fault diagnosis of rolling bearing. Reliab. Eng. Syst. Saf. 2021, 216, 108017. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, X.; Xiao, X.; Pei, C. Design of a fault detection and diagnose system for intelligent unmanned aerial vehicle navigation system. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 2170–2176. [Google Scholar] [CrossRef]
- Min, H.; Fang, Y.; Wu, X.; Lei, X.; Chen, S.; Teixeira, R.; Zhu, B.; Zhao, X.; Xu, Z. A fault diagnosis framework for autonomous vehicles with sensor self-diagnosis. Expert Syst. Appl. 2023, 224, 120002. [Google Scholar] [CrossRef]
- Alqurashi, M.; Wang, J. Performance analysis of fault detection and identification for multiple faults in GNSS and GNSS/INS integration. J. Appl. Geod. 2015, 9, 35–48. [Google Scholar] [CrossRef]
- Zuo, J.; Ding, J.; Feng, F. Latent Leakage Fault Identification and Diagnosis Based on Multi-Source Information Fusion Method for Key Pneumatic Units in Chinese Standard Electric Multiple Units (EMU) Braking System. Appl. Sci. 2019, 9, 300. [Google Scholar] [CrossRef]
- Zhu, Y.; Cheng, X.; Wang, L. A novel fault detection method for an integrated navigation system using Gaussian process regression. J. Navig. 2016, 69, 905–919. [Google Scholar] [CrossRef]
- Pirmoradi, F.N.; Sassani, F.; De Silva, C.W. Fault detection and diagnosis in a spacecraft attitude determination system. Acta Astronautica 2009, 65, 710–729. [Google Scholar] [CrossRef]
- Zhao, Y.; Chen, Y.; Chen, L.; Deng, X.; Jiang, N.; Hou, L. Intelligent Fault Diagnosis Method for AUV Integrated Navigation System. In Proceedings of the 2021 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 15–17 October 2021; pp. 896–901. [Google Scholar]
- Sadhukhan, C.; Mitra, S.K.; Naskar, M.K.; Sharifpur, M. Fault diagnosis of a nonlinear hybrid system using adaptive unscented Kalman filter bank. Eng. Comput. 2022, 38, 2717–2728. [Google Scholar] [CrossRef]
- Zhang, C.; Guo, C.; Zhang, D. Data Fusion Based on Adaptive Interacting Multiple Model for GPS/INS Integrated Navigation System. Appl. Sci. 2018, 8, 1682. [Google Scholar] [CrossRef]
- Stefenon, S.F.; Yow, K.C.; Nied, A.; Meyer, L.H. Classification of distribution power grid structures using inception v3 deep neural network. Electr. Eng. 2022, 104, 4557–4569. [Google Scholar] [CrossRef]
- Lin, P.; Qian, Z.; Lu, X.; Lin, Y.; Lai, Y.; Cheng, S.; Chen, Z.; Wu, L. Compound fault diagnosis model for photovoltaic array using multi-scale SE-ResNet. Sustain. Energy Technol. Assess. 2022, 50, 101785. [Google Scholar] [CrossRef]
- Zhu, Y.; Pei, Y.; Wang, A.; Xie, B.; Qian, Z. A partial domain adaptation scheme based on weighted adversarial nets with improved CBAM for fault diagnosis of wind turbine gearbox. Eng. Appl. Artif. Intell. 2023, 125, 106674. [Google Scholar] [CrossRef]
- Shi, Y.; Wang, Z.; Du, X.; Ling, G.; Jia, W.; Lu, Y. Research on the membrane fouling diagnosis of MBR membrane module based on ECA-CNN. J. Environ. Chem. Eng. 2022, 10, 107649. [Google Scholar] [CrossRef]
- Sun, K.; Gebre-Egziabher, D. A fault detection and isolation design for a dual pitot tube air data system. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; pp. 62–72. [Google Scholar]
- Ossmann, D. Enhanced detection and isolation of angle of attack sensor faults. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, San Diego, CA, USA, 4–8 January 2016; p. 1135. [Google Scholar]
- Karim, F.; Majumdar, S.; Darabi, H.; Chen, S. LSTM fully convolutional networks for time series classification. IEEE Access 2017, 6, 1662–1669. [Google Scholar] [CrossRef]
- Zhang, H.; Ge, B.; Han, B. Real-Time Motor Fault Diagnosis Based on TCN and Attention. Machines 2022, 10, 249. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer | Structure Parameters | Output Dimensions |
|---|---|---|
| Input | 64 × 20 × 12 | 64 × 1 × 20 × 12 |
| Conv | 3 × 3 × 16 | 64 × 16 × 18 × 10 |
| Max Pooling | 2 × 2 | 64 × 16 × 9 × 5 |
| Inception V3 | 1 × 1 × 32 | 64 × 128 × 9 × 5 |
| 1 × 1 × 16/1 × 3 × 32/3 × 1 × 32 | ||
| 1 × 1 × 16/(1 × 3 × 32/3 × 1 × 32)×2 | ||
| 3 × 3/1 × 1 × 32 | ||
| ECA | - | 64 × 128 × 9 × 5 |
| FC | - | 64 × 7 |
| X (m) | Y (m) | Z (m) | |
|---|---|---|---|
| Random Range | 8000~12,000 | −50~50 | 1000~2000 |
| Fault Category | Fault Sensor | Label | Fault Severity | Training Samples | Testing Samples |
|---|---|---|---|---|---|
| Normal | - | 0 | - | 500 | 100 |
| Step Fault | Angle of attack | 1 | 0.04~0.4 (°) | 500 | 100 |
| Sideslip angle | 2 | 0.02~0.2 (°) | 500 | 100 | |
| Airspeed | 3 | 3~10 (m/s) | 500 | 100 | |
| Ramp Fault | Angle of attack | 4 | 0.001~0.01 (°/s) | 500 | 100 |
| Sideslip angle | 5 | 0.001~0.01 (°/s) | 500 | 100 | |
| Airspeed | 6 | 0.05~0.5 (m/s2) | 500 | 100 |
| Innovation and Residual | Innovation | Filtered Data | |
|---|---|---|---|
| Precision | 0.9920 | 0.8057 | 0.8897 |
| Recall | 0.9920 | 0.8057 | 0.8897 |
| F1 Score | 0.9920 | 0.7830 | 0.8898 |
| Inception V3 + ECA | Inception V3 | CNN | FCN | TCN | |
|---|---|---|---|---|---|
| Precision | 0.9725 | 0.9668 | 0.9299 | 0.9064 | 0.9447 |
| Recall | 0.9728 | 0.9668 | 0.9304 | 0.9062 | 0.9443 |
| F1 Score | 0.9726 | 0.9669 | 0.9307 | 0.9069 | 0.9447 |
| Model Parameters | 58,284 | 58,279 | 97,670 | 94,023 | 117,319 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Cheng, Y.; Jiang, B.; Guo, K.; Hu, H. A Fault Diagnosis Method for a Missile Air Data System Based on Unscented Kalman Filter and Inception V3 Methods. Appl. Sci. 2024, 14, 6309. https://doi.org/10.3390/app14146309
Wang Z, Cheng Y, Jiang B, Guo K, Hu H. A Fault Diagnosis Method for a Missile Air Data System Based on Unscented Kalman Filter and Inception V3 Methods. Applied Sciences. 2024; 14(14):6309. https://doi.org/10.3390/app14146309
Chicago/Turabian StyleWang, Ziyue, Yuehua Cheng, Bin Jiang, Kun Guo, and Hengsong Hu. 2024. "A Fault Diagnosis Method for a Missile Air Data System Based on Unscented Kalman Filter and Inception V3 Methods" Applied Sciences 14, no. 14: 6309. https://doi.org/10.3390/app14146309
APA StyleWang, Z., Cheng, Y., Jiang, B., Guo, K., & Hu, H. (2024). A Fault Diagnosis Method for a Missile Air Data System Based on Unscented Kalman Filter and Inception V3 Methods. Applied Sciences, 14(14), 6309. https://doi.org/10.3390/app14146309