1. Introduction
Ships and offshore structures experiencing low-velocity impacts, including collision, grounding, and floating object collisions, are prone to catastrophic disasters. In severe cases, the structures on the side of the ship that are impacted can undergo significant deformations and fractures, potentially leading to environmental pollution and injuries. The serious consequences of these collision incidents have driven researchers to investigate structural crashworthiness. Numerous valuable insights have been gained through analytical studies, numerical simulations, and experiments [
1,
2,
3,
4].
Experimental research has been conducted since the last century to evaluate the important parameters, including impact load, stress, and the initiation and propagation of fractures, associated with impact events. Experimental analyses are regarded as an irreplaceable method in the field of impact research and serve as a verification tool [
5]. However, owing to their high cost and restricted experimental conditions, small-scale model tests are frequently utilized to study the response of ship structures, enabling the prediction of the damage sustained by the prototype structure during collisions [
6]. To accurately capture the behaviors of the prototype, it is crucial to design models based on appropriate similarity laws. Given the significant nonlinear effects involved in impact scenarios, dimensional analysis methods are extensively employed to simplify these problems. The Buckingham-Π theorem [
7], a widely used approach, establishes scaling laws and asserts that complete similarity is maintained when all dimensionless numbers of the scaled model are identical to those of the prototype, as expressed in Equation (1).
The scaling laws governing impacted structures are well established and extensively employed in the field [
8,
9]. These laws, which are based on a dimensional analysis within the classic mass–length–time (MLT) system, facilitate the achievement of complete similarity. The fundamental relationships between the scaled models and the prototypes are summarized as scaling factors in references [
6,
10]. These scaling factors establish a connection between the dynamic behavior of the prototype and the perfect similar scaled models. The scaling factor
β, defined in Equation (2), represents the relationship between the dimensions of the perfect similar scaled model (as subscript
m) and those of the prototype (as subscript
p). Additionally, the relationship defined for variable
X can be denoted using the scaling factor
βX and is expressed in Equation (3).
However, in practical problems, particularly those involving impact scenarios, achieving complete similarity as described in the previous statement is often unattainable. This leads to what is known as incomplete similarity, also referred to as similarity for distortion [
11]. Previous research has primarily focused on generating solutions and related parameters solely through a dimensional analysis. However, when distortions are present, the aforementioned approach becomes inadequate, emphasizing the need for further investigation and research. Moreover, Jones [
6] highlighted that the response of structures under impact loads does not adhere to conventional similarity laws due to several factors, including strain rate sensitivity, structural fracture and thermal responses, and gravity. Consequently, it is imperative to explore the similarity laws that account for distortions and their additional effects.
Structural dynamic behaviors, especially those of structures made of materials like steel and alloys, have been extensively studied to understand the impact of strain rate [
11,
12,
13,
14,
15]. As the field of similarity applications has evolved, an increasing number of researchers have turned their attention to geometric distortion similarity methods. They [
16,
17,
18,
19,
20] primarily focused on the buckling of stiffened plates under compressive loads, with the objective of ensuring the similarity of key parameters during the buckling process. Additionally, when stiffened plates are subjected to lateral impacts, the additional common types of distortion encountered pertain to sole distortion, such as the plate thickness [
21,
22,
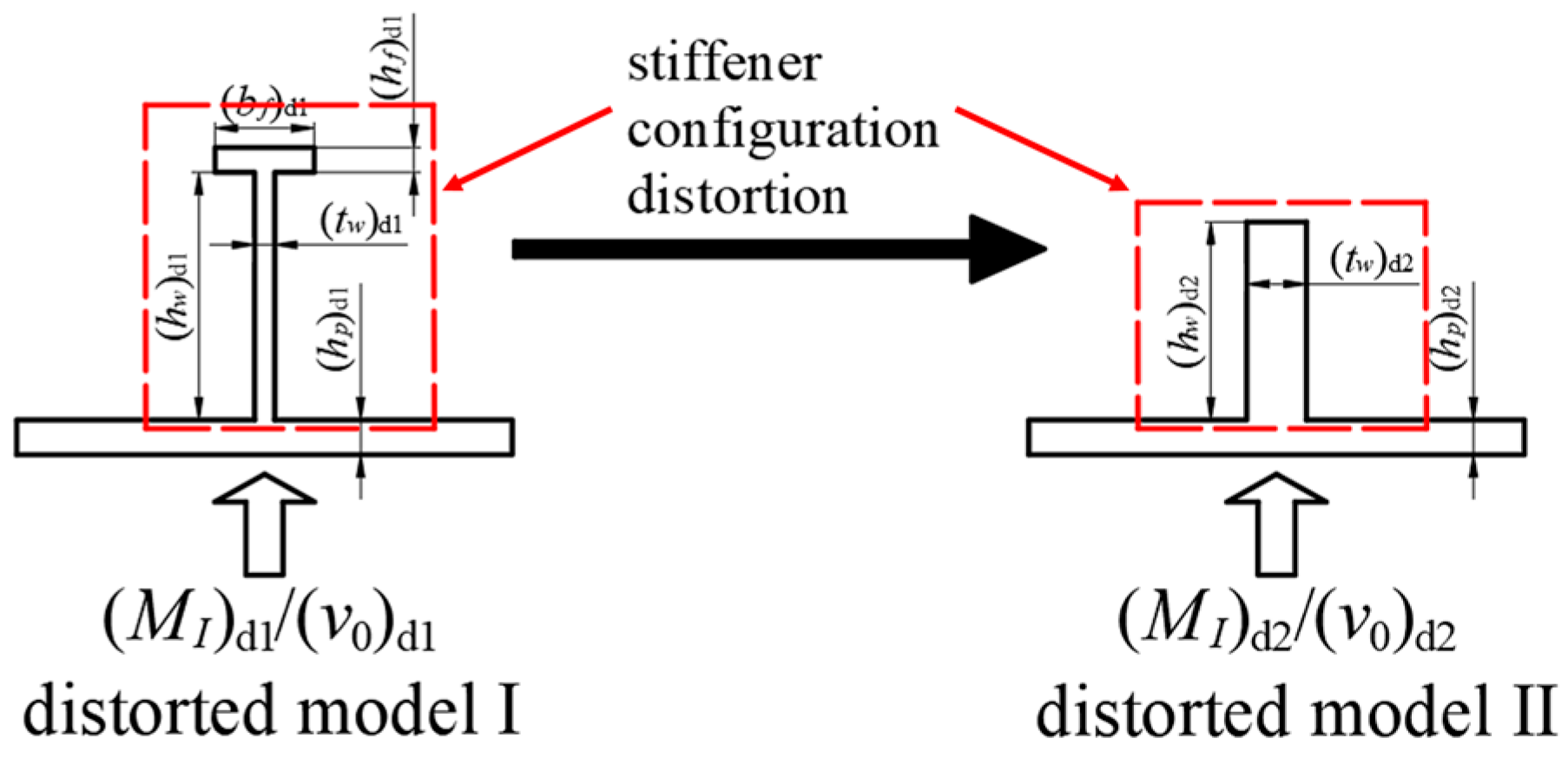
23], and complex distortion, such as stiffener configurations [
24,
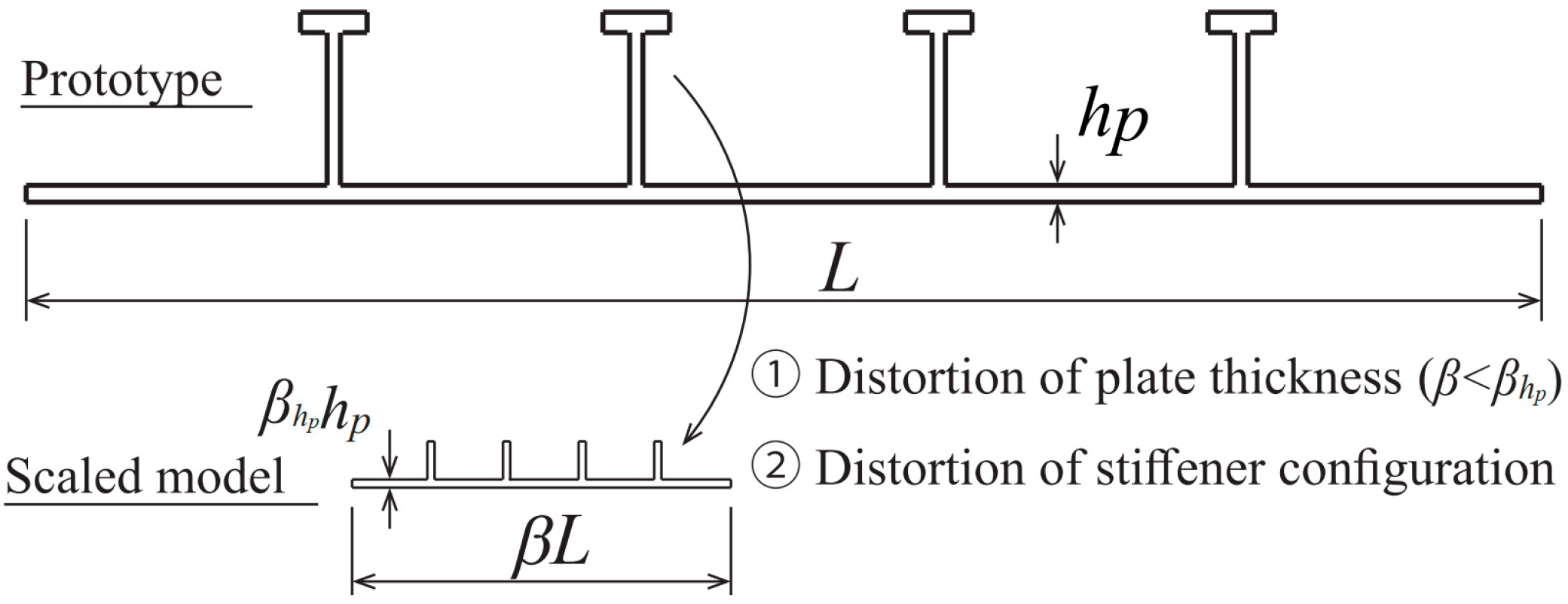
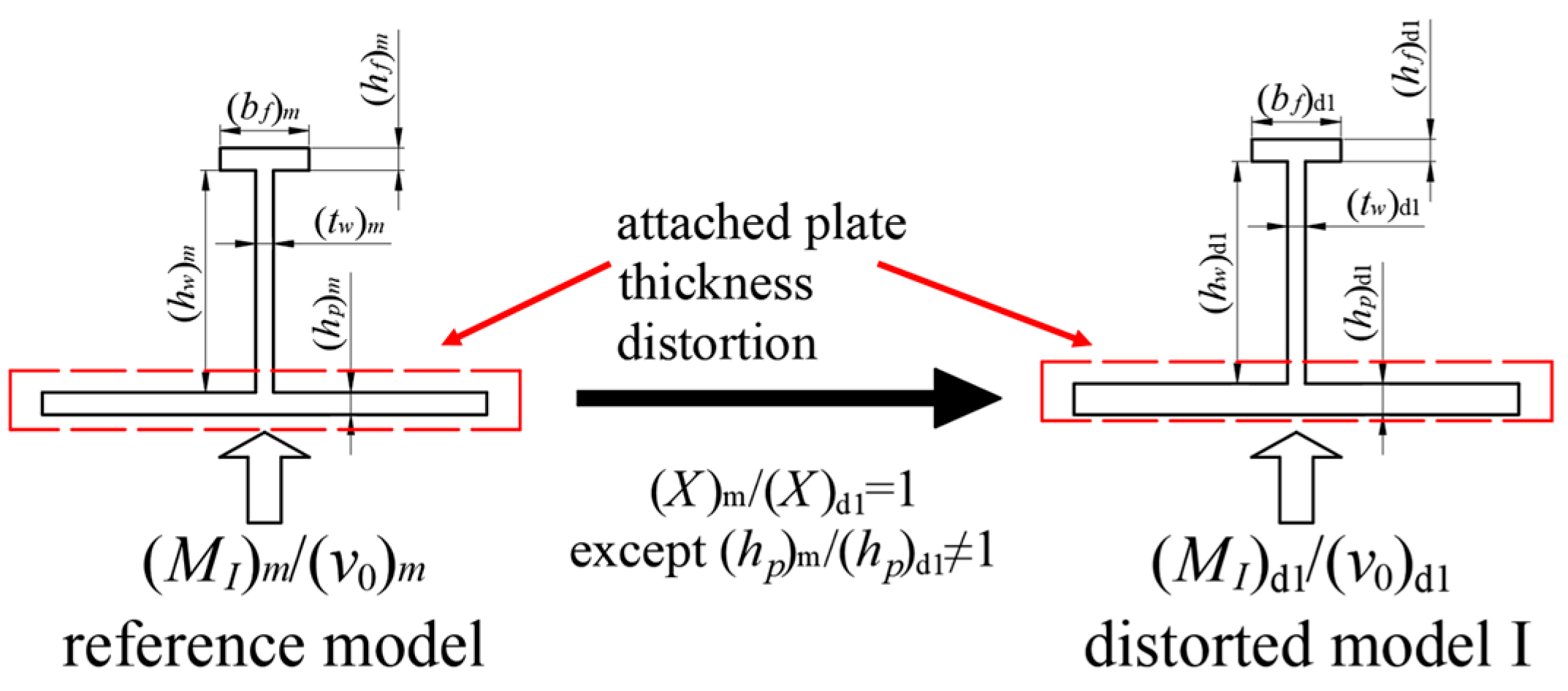
25], which are frequently constrained owing to the substantial overall scaling factor in thin-walled shipbuilding model tests, as
Figure 1 illustrates. The thin-walled shipbuilding structure, characterized by its considerable size, requires a significant overall scaling factor (
β) to obtain a specimen in model testing. Consequently, the scaled model’s plate thickness and stiffener spacing are significantly reduced, leading to a distortion of plate thickness (
β <
βhp) and the compromise approach of replacing T-type stiffeners with flat bars. These similarity requirements often encounter challenges to the same plate thickness and stiffener configurations, owing to limitations in achievable part sizes [
11].
Oshiro and Alves [
11] proposed a method using the corrected impact velocity to address the geometric distortion that arises between a prototype and its scaled model that are composed of the same material. To account for geometric distortion based on previous work on the strain rate effect, they introduced a corrected impact velocity factor using an exponential function of the scaling factor β and the involved distortion-related factor with an exponent
nV. On the basis of the VSG dimensionless system, Zhou [
10] introduced a scaling factor
βS, relating to the static moment for structural cross-sections, to account for geometric distortion, leading to a corrected velocity scaling factor. This approach focuses on the geometric distortions to the plate thickness of the attached plate during impact. Cho et al. [
21] introduced an empirical similarity method, which offers an empirical approach to establishing dependable correlations between prototypes and scaled models. This method addresses two common types of distortions: geometric and material. Mazzariol and Alves [
22] proposed a novel approach to address the small thickness distortions in beams and plates by introducing a new expression for calculating the corrected impact velocity. This expression is based on a dimensionless parameter, the plastic bending moment M
0, to effectively compensate for small thickness distortions.
Based on the correction approach proposed by Oshiro and Alves [
11,
14], Kong et al. [
23] established a similar procedure to address incomplete scaled-down plates distorted in a single dimension, and developed a rapid solution to determine the significant exponent
nV. Furthermore, in their subsequent work, Kong et al. [
24] extended the corrected similarity relationship to account for the additional distortions encountered in prototype stiffened plates and scaled-down models subjected to blast loads. These distortions involved variations in the plate thickness and stiffener configuration relative to the prototype. Chang et al. [
25] underscored the significance of stiffener dimensions during impact and proposed a technique for a stiffened plate with distorted flat bar stiffeners, in which an equivalent plate thickness is utilized to substitute for the stiffeners. With the help of this equivalent plate thickness, they derived a similarity law based on the DLV dimensionless system [
26] that accounts for the distorted stiffener dimensions. Although numerical simulation investigations indicate that a scaled model with distorted flat bar stiffeners can predict the responses of the prototype, the focus was on a single type of stiffener, neglecting the deviation of different configurations on dominant behaviors during impact.
It is evident that the configuration of the stiffener must be adjusted in accordance with the specific experimental conditions, with the exception of the dimensions of the stiffener itself. Consequently, geometric distortion presents notable challenges when attempting to simulate prototype behaviors using scaled models. These phenomena are not prone to scaling, thereby impeding the accurate replication of the prototype in geometrically distorted scaled model experiments. Although existing methods [
10,
11,
12,
13,
14,
15,
21,
22,
23,
24,
25,
26] for addressing geometrically distorted scaled models provide a means of identifying similarities, they primarily focus on individual geometric distortions and require iterative processes to identify key factors. This makes them complex to utilize in practical applications. To address these nonscaling phenomena, this study introduces a systematic procedure that modifies the load cases in a rational manner, primarily aimed at compensating for geometric distortions relative to the prototype. It is imperative to emphasize that the similitude methodology is based on the assumption of thin plate theory focusing on ductile material, requiring the prototype to be composed of thin, ductile plates.
The following section outlines the structure of the remainder of this paper.
Section 2 investigates the dynamic behavior of a stiffened plate under impact loading using the finite element method. It provides valuable guidance for establishing suitable criteria for altering the stiffener configuration in distorted models.
Section 3 outlines the similarity procedure employed to capture the dynamic response of a prototype stiffened plate using distorted scaled models, neglecting the strain rate effect based on numerical observations, and focusing on correcting double input parameters involving the load case and geometry.
Section 4 presents numerical simulations that validate the reliability of the similarity procedure and distortion criterion for shipbuilding structures.
Section 5 discusses the limitations of the proposed method, emphasizing large stiffener heights and introducing an approximate approach to discern dominant behaviors during impact. Finally,
Section 6 summarizes the key findings and contributions of this study.
5. Discussion
5.1. Prototype Stiffened Plates Considering a Relatively Large Web Height
In various collision scenarios, the stiffened plates are subjected to vertical impact loads, resulting in in-plane loads borne by the stiffened web. Although the case study highlights the suitability of the proposed similarity procedure for designing distorted models with commonly suggested stiffeners in shipbuilding, it is important to consider that extreme structures with heights significantly greater than the recommended values may exist, rendering them susceptible to buckling.
In this study, a straightforward similarity procedure was introduced, primarily focusing on the plastic bending moment and membrane actions, while disregarding the intricate buckling phenomena exhibited by stiffeners during impact events. However, it is crucial to acknowledge that these complex buckling behaviors have a substantial influence on the resistance force and can result in unacceptable deviations when designing distorted scaled models. Therefore, in this section, an expanded criterion is proposed to address prototypes with significantly greater heights, although they may be rare, as they can occur in practical scenarios. Accordingly, an extreme reference model (RP-6) with a web height of 60 mm, which is much larger than the suggested structures, is designed. The detailed dimensions and geometric properties are listed in
Table 14 and illustrated in
Figure 19.
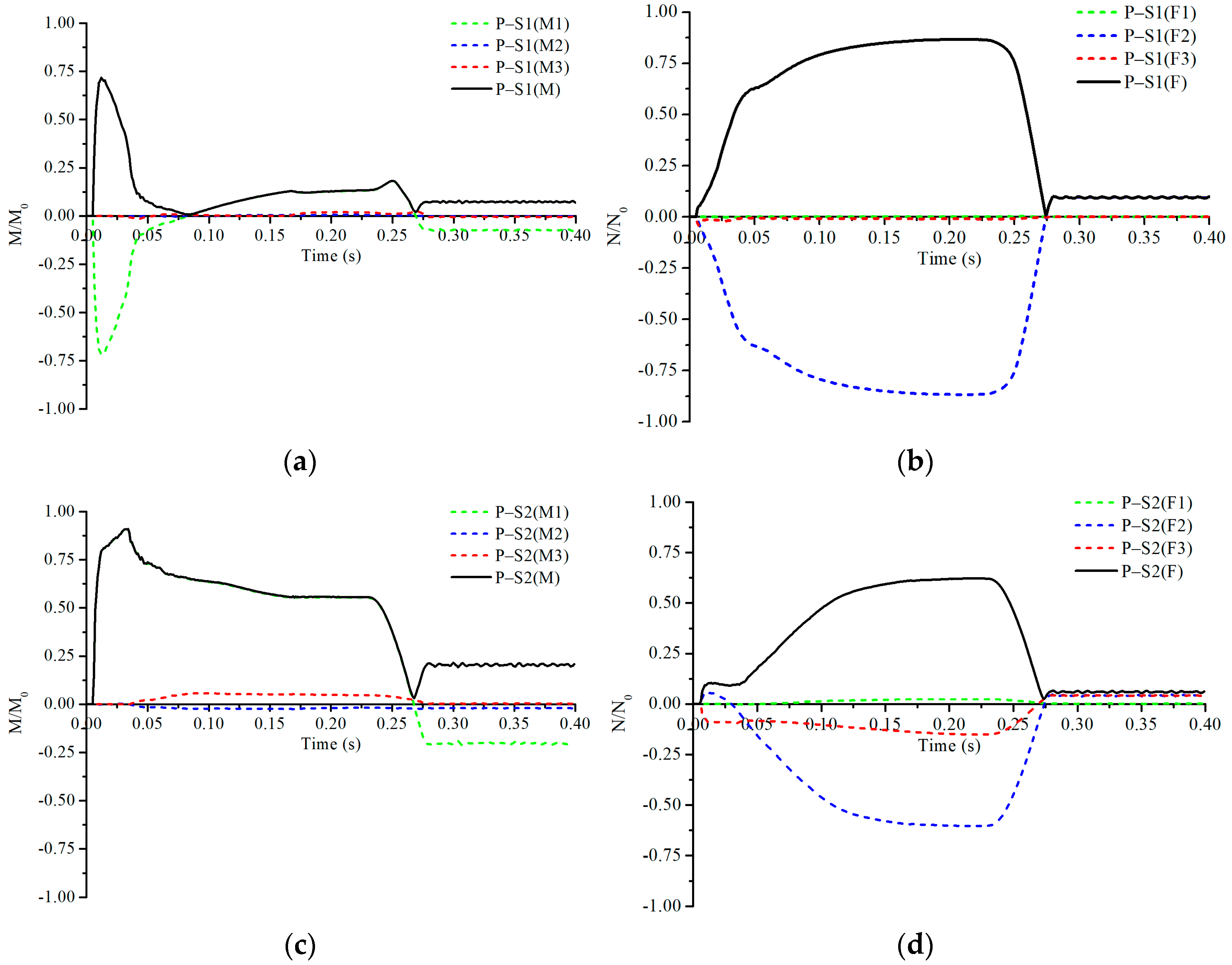
Additionally, the normalized sectional bending moment component M1 and axial force component F2 are collected from the numerical results, where the fully plastic moment and fully plastic force are 1,547,010 N·mm and 86,313 N, respectively, calculated based on Equations (6) and (7).
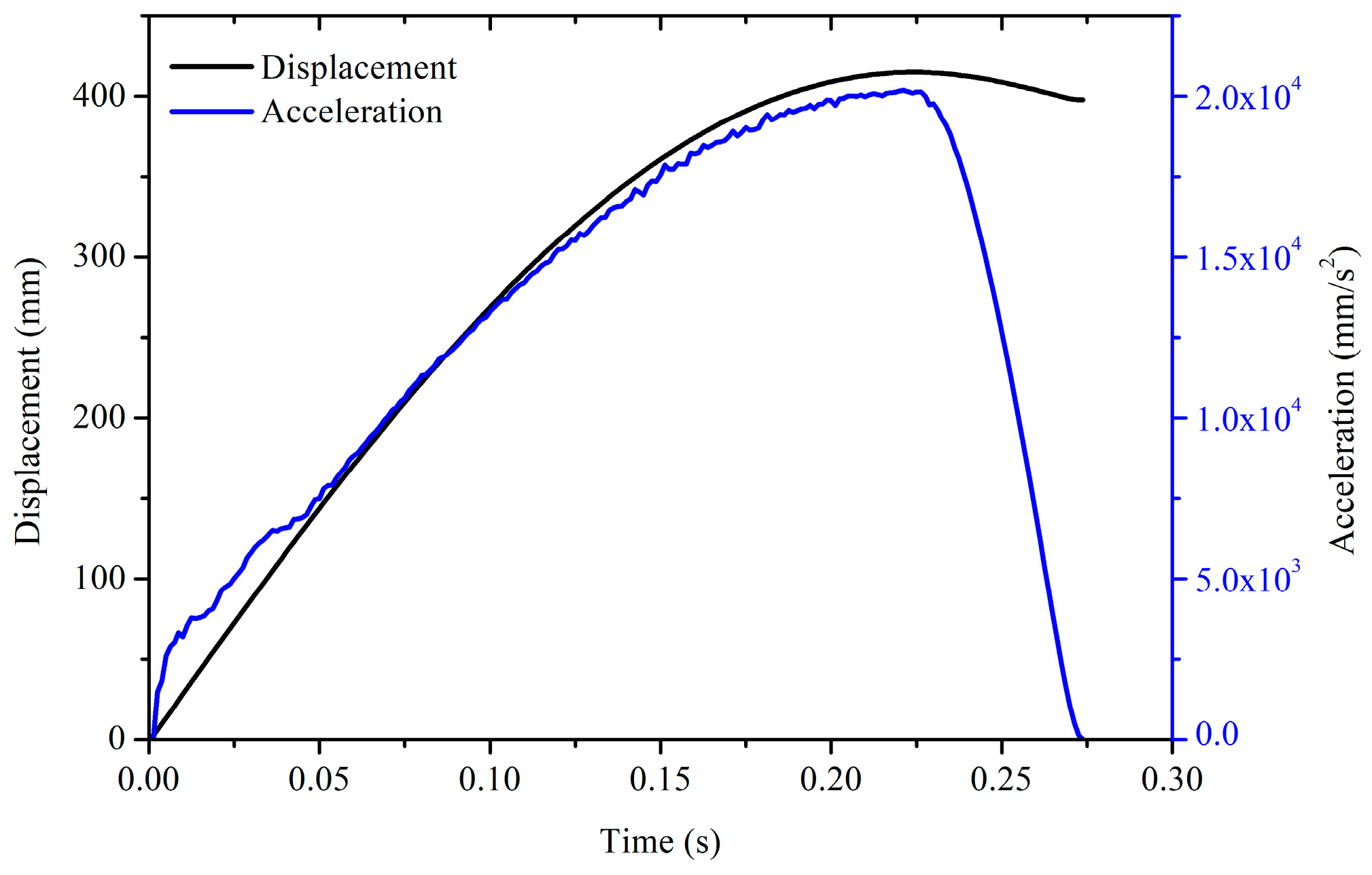
Figure 20 illustrates the time-series curves, including the dynamic responses and normalized sectional moment and force results. The acceleration responses of RP-6 (red solid curve) initially exhibited a first wave crest at t1 = 0.000875 s, followed by a second wave crest at t2 = 0.010625 s, resulting from secondary buckling, and then a peak.
Figure 21 and
Figure 22 present the deformation of the center and two adjacent integrated stiffeners under the impact block seen from the cut-out section at the midspan of the stiffener, in accordance with the view direction depicted in
Figure 19. An obvious buckling behavior of the stiffener web can be observed in
Figure 21, corresponding to the first wave crest. As the deformation progressed to a more significant stage, the stiffened plates began to resist, primarily through the application of membrane force. The second wave crest of RP-6 in
Figure 20 appeared at t2 = 0.010625 s. During this stage, the stiffener web experienced heavy buckling, leading to a secondary buckle influencing not only the center stiffener but also the adjacent stiffeners, as shown in
Figure 22. This behavior may contribute to a decrease in the structural rigidity, thereby influencing the occurrence of the second crest in the RP-6 results.
When a stiffener has an extremely slender web, it is more likely to behave as a web girder than traditional stiffeners. The deformations of web girders subjected to in-plane concentrated loads have been extensively investigated. Various simplified analytical methods have been proposed to predict the resistance of web girders, with a particular focus on different formulations of the fold-height parameter
H [
3,
30]. Gao et al. [
30] studied the behavior of a web girder subjected to an in-plane concentrated load. According to the analytical solution [
30] for web girders, the resistance responses are significantly influenced by the web thickness. In addition, in the large-deformation stage, the dynamic behavior is dominated by membrane behavior rather than bending action.
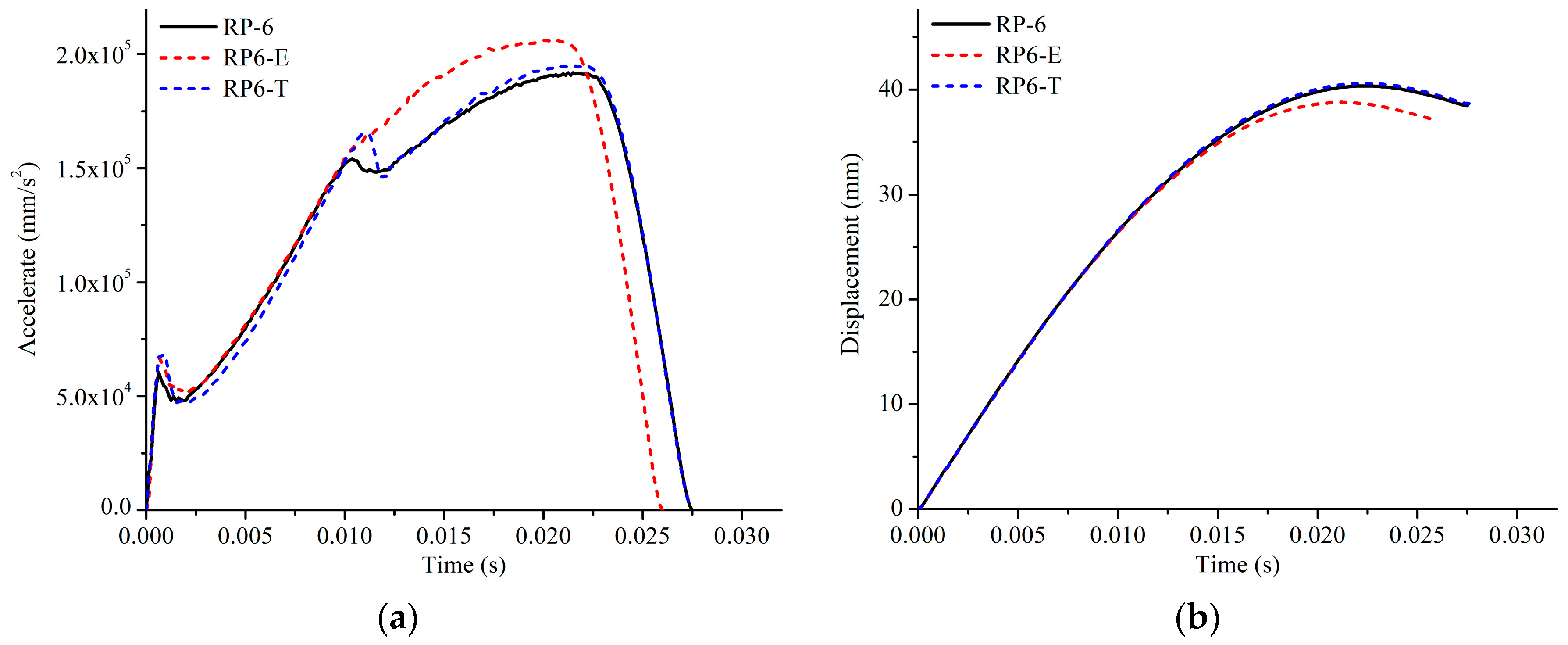
Therefore, an expanded criterion, denoted as Criterion 2, was introduced to maintain the web thickness and sectional area as close to those of the reference model as possible, specifically for T-type stiffeners with very large web heights. To examine the effectiveness of the different design criteria, a series of distorted models obeying Criterion 1 and Criterion 2 were constructed based on RP-6, whose detailed dimensions and geometric properties are listed in
Table 15. Through preserving a consistent sectional area and static moment, the web dimensions of RP6-E were determined. Based on this, a distorted model, RP6-T, was created with a web thickness of 1.15 mm to maintain a consistent sectional area. The impact mass was calculated using Equations (23) and (24). Subsequently, numerical simulations were performed, the results of which are presented in
Table 15. Furthermore,
Figure 23 presents the acceleration and displacement history curves for the three simulation cases.
During the initial phase, a pronounced similarity to the reference model was observed in the distorted model RP6-E, which was characterized by a static moment and was sectional. However, as the impact event transitioned into a large deformation stage, RP6-E continued to display observable variations, as shown in
Figure 23. Conversely, the distorted model RP6-T shows a behavior that closely mirrors that of the reference model, exhibiting a noticeable reduction in deviation compared to the other distorted models. In summary, it is deduced that the resistance force during impact, particularly during the substantial deformation stages, is significantly influenced by the web plate thickness. As a corollary, we propose Criterion 2 for reference models featuring larger web heights, urging the prioritization of aligning the web thickness as closely as possible to that of the reference model, followed by selecting a web height that maintains a consistent sectional area.
5.2. An Approximate Method to Estimate the Dominant Behavior during the Impact
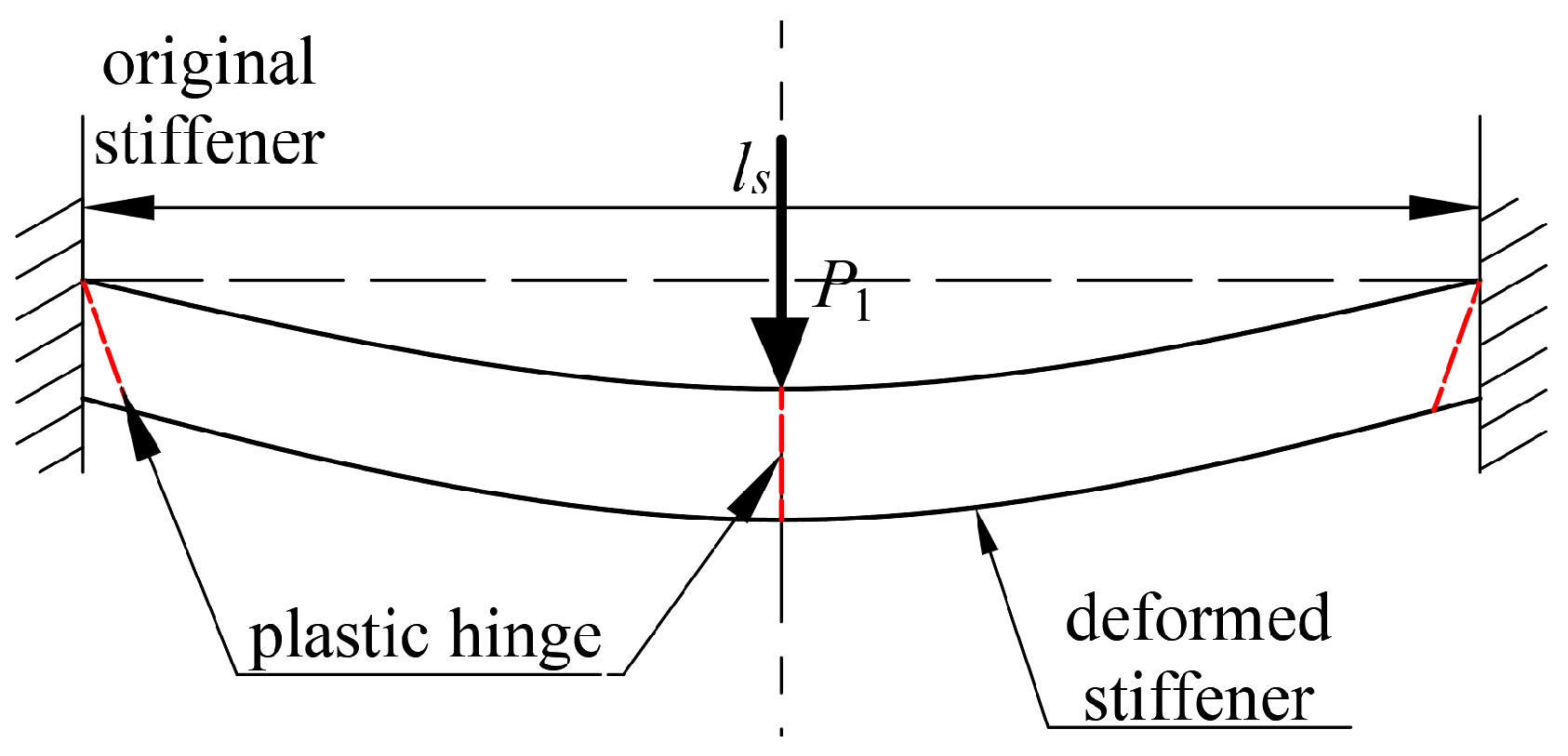
The effectiveness of the expanded criterion was verified for RP-6, which featured large web heights. However, it is crucial to establish clear conditions for determining suitable criteria for specific prototype structures based on their dominant behaviors. A straightforward method based on elastic–plastic theory was proposed to identify the dominant behavior of a prototype under impact loading. The static concentrated force that induces the plastic hinge formation for an integrated stiffener within a stiffened plate, as shown in
Figure 24, can be estimated as follows:
where
lS is the stiffener span length, and stress
σ0 is taken as the average value of the yield stress
σY and ultimate stress
σu.
In addition, considerable research has been conducted on the buckling characteristics of web plates subjected to concentrated in-plane forces. Timoshenko [
31] derived a formula for determining the critical buckling force (
Pcr) of a rectangular plate with four simply supported edges subjected to a pair of concentrated compressive forces on opposite sides, as shown in
Figure 25. The formula for a web plate during impact is expressed as follows:
where
hw is the web girder depth and
tw is the web girder thickness.
Given the specific boundary conditions and load case inherent in the analysis of the investigated stiffened plate, where a concentrated load was applied only from one side, it was imperative to modify the critical buckling force calculated from Equation (26). To achieve this, a coefficient derived from finite element (FE) results was introduced. By leveraging these numerical findings, a coefficient denoted as
C = 1.324 is proposed to adaptively estimate the critical buckling force (
Pcr-e) for the web plate in this study, as defined in Equation (27).
Therefore, the ratio
P1/
Pcr-e, where
P1 denotes the force that causes plastic hinge formation, is calculated to determine the threshold between the static moment-dominant and web thickness-dominant intervals
Table 16 lists the relevant geometric parameters and analytical results for the static concentrated force
P1,
Pcr-e and ratio
P1/
Pcr-e. Based on the results of the finite element analysis, it is evident that when the ratio
P1/
Pcr-e of the reference model is less than 1.55 (
RP-1~
RP-5), the stiffener exhibits a more dominant behavior characterized by bending and membrane actions. In such cases, Criterion 1 was deemed more appropriate. Conversely, when the ratio
P1/
Pcr-e of the reference model exceeds 3.21 (
RP-6), both the reference and distorted models exhibit a heavy buckle, functioning as a web girder. In these scenarios, Criterion 2 was more suitable, as shown in
Table 16.
5.3. Criterion 3 for Prototype with an Intermediate Stiffener Web Height
With respect to the specified criteria for the intermediate range of the ratio
P1/
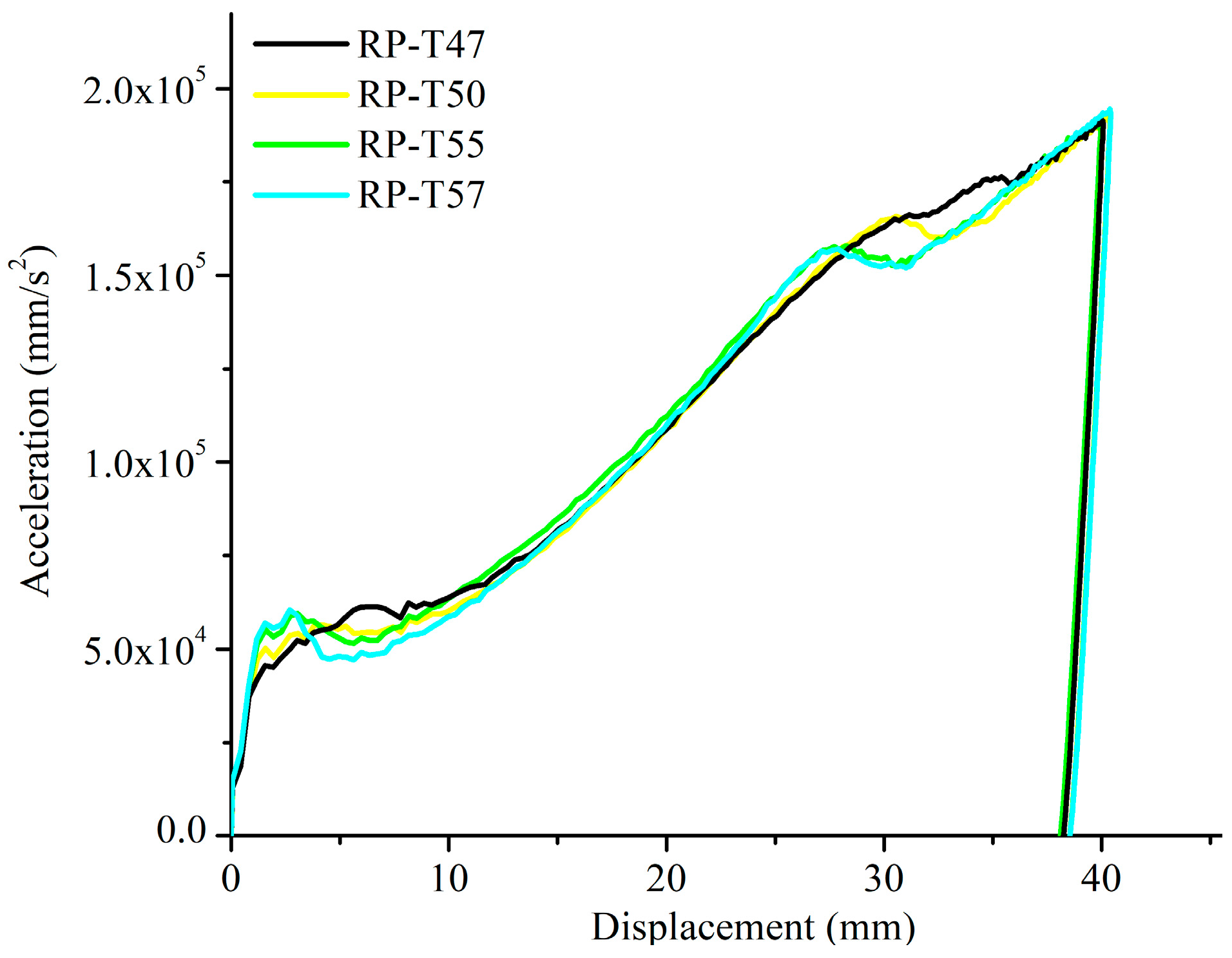
Pcr-e, spanning from 1.55 to 3.21, a distinct situation emerges warranting individual consideration. Within this intermediate range, prototypes are termed intermediate prototypes, and their corresponding perfectly similar models are referred to as intermediate reference models. To explore this range, reference models with web heights ranging from 47 mm to 57 mm are subjected to impact simulations under consistent conditions involving an impact mass of 0.4 t and an initial velocity of 3.0 m/s. The comprehensive details of the dimensions and numerical results for each reference model are illustrated in
Table 17 and
Figure 26. Furthermore,
Figure 26 underscores the observation that the intermediate reference models, characterized by consistent web thicknesses, exhibit tendencies towards similar resistance behaviors, irrespective of the web depth and more obvious buckling behaviors as the web depth increases.
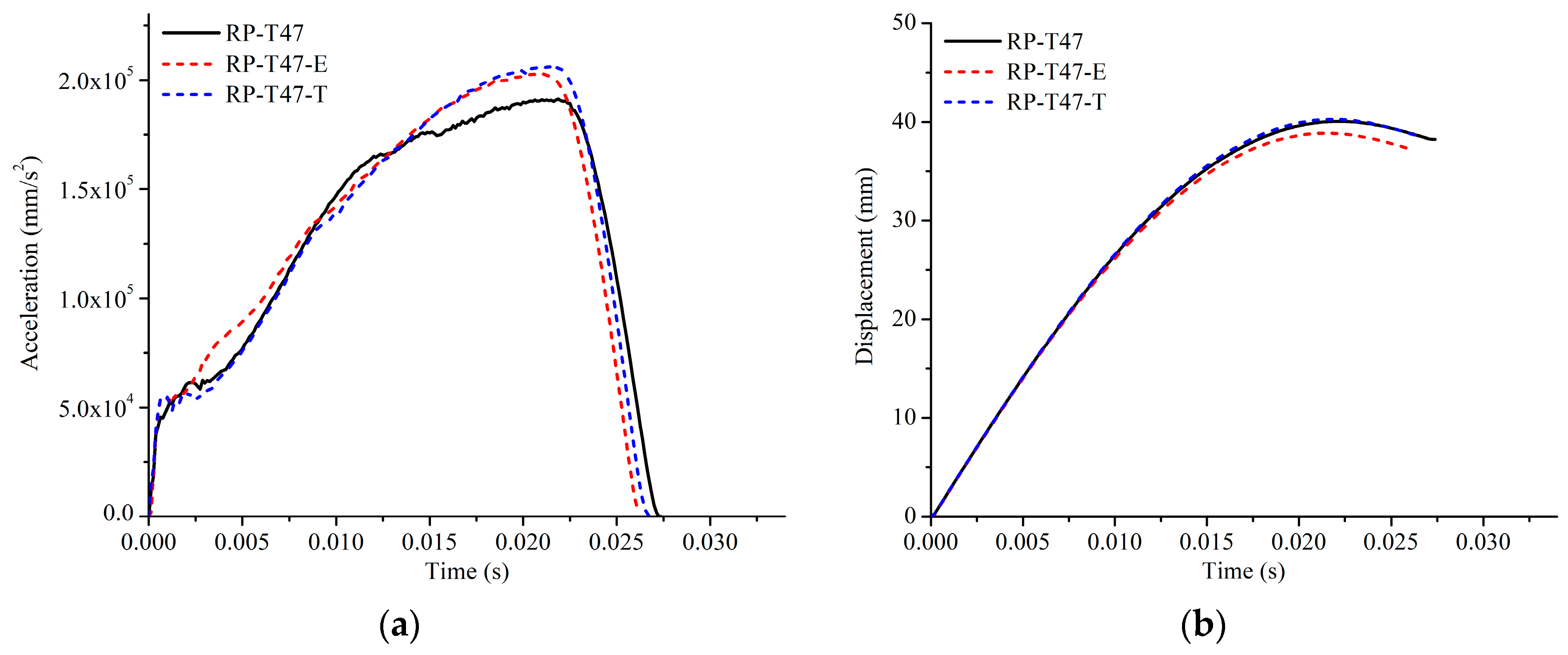
Furthermore, an investigation of distorted models related to the intermediate reference model RP-T47 was undertaken. These distorted models adhere to the proposed criteria, and comprehensive details regarding their dimensions are presented in
Table 18. Similarly, RP-T47-E maintained sectional area and static moment consistent with RP-T47, whereas RP-T47-T developed with a constant web thickness of 1.15 mm, preserving the same sectional area as RP-T47. To maintain consistency, the impact mass was adjusted using Equations (23) and (24). Consequently, numerical simulations were conducted, and the results are presented in
Table 18. Furthermore,
Figure 27 presents the acceleration and displacement history curves for the three simulation cases.
The reference model RP-T47 experienced a notable buckling phenomenon, causing a sudden reduction in acceleration just before the peak crest (displacement = 30.48 mm), whereas the distorted models did not exhibit this behavior, leading to significant deviations. Consequently, the substantial deviations between these distorted models and the reference model demonstrate that the two proposed criteria are not suitable for intermediate models represented by RP-T47. This section presents an empirical method to determine the appropriate value of P1/Pcr-e, which forms the basis for Criterion 3 to address intermediate prototypes.
Importantly, owing to the different boundary conditions on the unloading side of the web plate, the suitable value of P1/Pcr-e for the flat-bar stiffener, corresponding to the static moment-dominant and web thickness-dominant intervals, differed from that of the T-type stiffener. Previous research indicates that prototypes with intermediate web height stiffeners tend to be web thickness-dominant. Consequently, the recommended value of the ratio P1/Pcr-e for the various prototypes should be related to the corresponding web thickness.
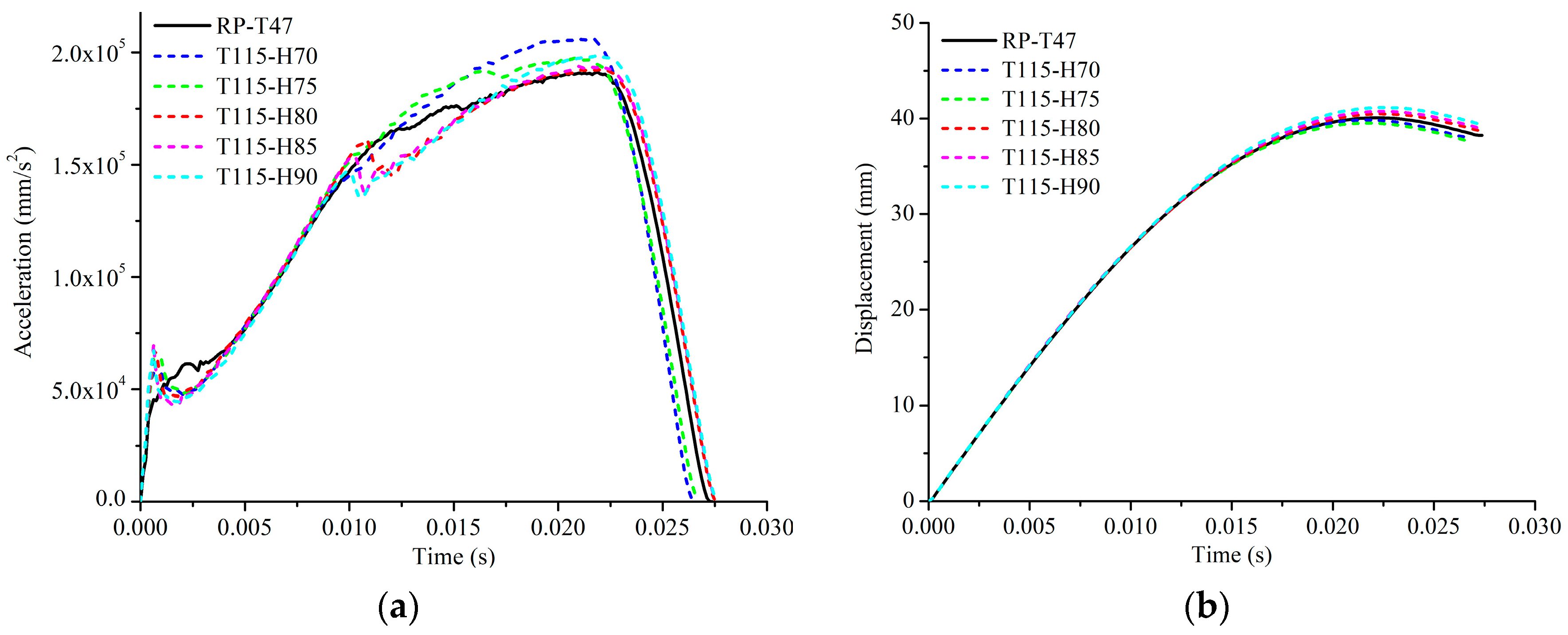
In this context, distorted models featuring flat-bar stiffeners, characterized by a web thickness of 1.15 mm and web heights ranging from 70 to 90 mm, were subjected to simulations.
Table 19 provides detailed information on the dimensions and analytical results of the ratio
P1/
Pcr-e for these models. In this empirical investigation, the load case remains consistent across all simulations, involving an impact mass of 0.4 t and an impact velocity of 3.0 m/s. The corresponding numerical results are summarized and compared to RP-T47 (black solid line) and are presented in
Table 19 and
Figure 28.
Based on the finite element analysis results, it is apparent that the flat-bar stiffeners exhibit the most similar responses when the ratio
P1/
Pcr-e of the distorted model is 4.58 (T115-H80). Additionally, in
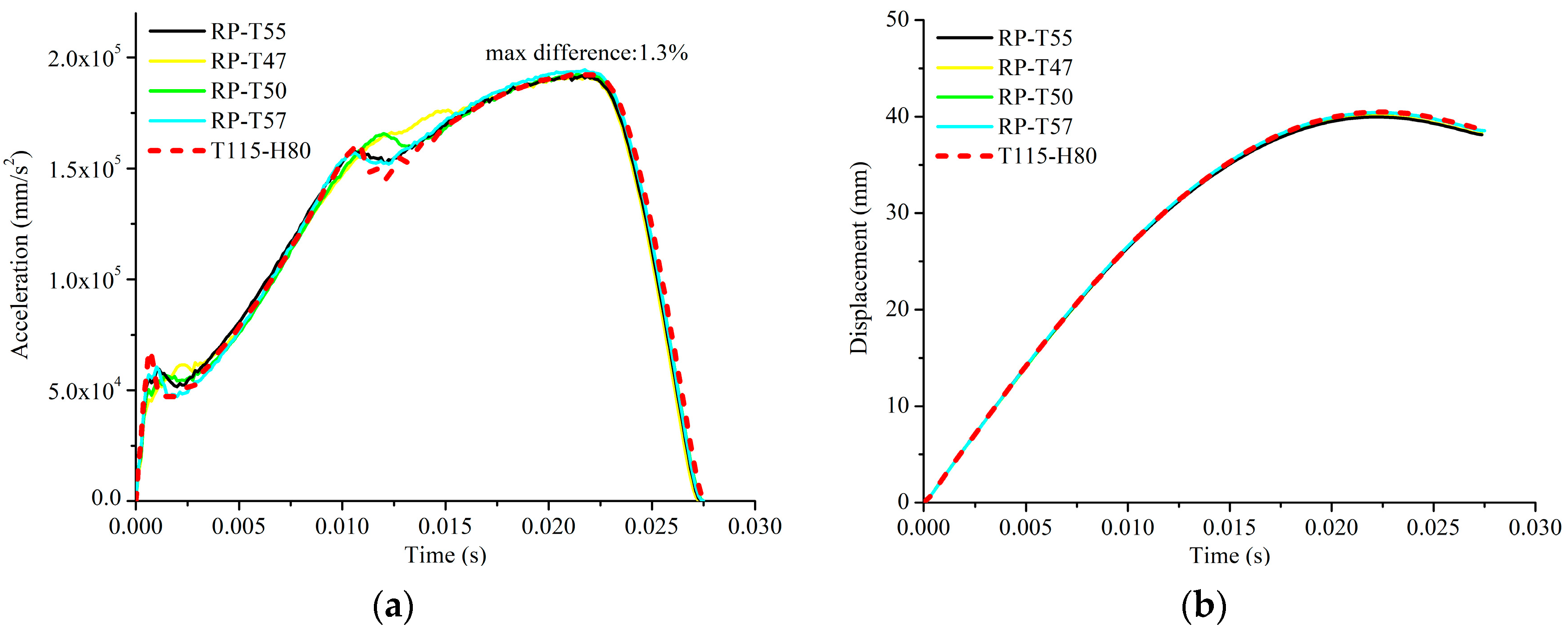
Figure 29, the distorted model T115-H80 (red dashed line) is compared with the other intermediate reference models listed in
Table 17. The maximum difference in the final displacement and peak acceleration between T115-H80 and the reference models was less than 1.30%.
Hence, it is recommended that the distorted model T115-H80, characterized by a ratio
P1/
Pcr-e of 4.58, aptly represents the dominant behavior within the intermediate range of the ratio
P1/
Pcr-e, spanning from 1.55 to 3.21, when the web thickness is 1.15 mm (see
Table 16). Furthermore, by simplifying the sectional properties, the ratio
P1/
Pcr-e was inferred to be proportional to
. Under the identical procedure, the most suitable distorted model for the three supplementary groups of intermediate-stiffened plates reference models with consistent web thicknesses of 0.9 mm, 1.0 mm, and 1.1 mm were examined with various web heights. As a result, the minimum difference from the reference model was obtained by the web heights of 78 mm, 79 mm, and 80 mm, respectively, for the web thicknesses of 0.9 mm, 1.0 mm, and 1.1 mm, revealing a consistent trend in web height, primarily ranging from 78 to 80 mm, as shown in
Figure 30. The blue square scatter represents the web height, and the blue circle scatters represent the ratio
P1/
Pcr-e of the most suitable distorted model across these groups.
Therefore, owing to the insensitivity of the web height in the previous group, the ratio
P1/
Pcr-e of the suggested distorted model was assumed to depend on the inverse square of the web thickness (
). As a result, an empirical equation for determining the ratio
P1/
Pcr-e of distorted models featuring flat-bar stiffeners in relation to the original web thickness of the reference model was assumed through previous numerical simulations as Equation (28) and illustrated in
Figure 30.
Hence, Criterion 3 was devised based on the empirical equation, Equation (28), with the objective of adjusting the distorted models to possess a consistent web thickness and an appropriate ratio of P1/Pcr-e, while maintaining the same load case as the reference model.
5.4. Method of Corrected Similarity
Generally, three criteria were utilized to ensure that the significant geometric parameters of the stiffener remained consistent, which enabled a partial similarity in the dominant behavior and compensated for the distorted stiffener configuration in different situations.
Criterion 1: Maintain the sectional static moment and sectional area of the integrated stiffener consistent with the reference model; correct the impact mass using Equation (24) if necessary;
Criterion 2: Maintain the sectional area and web thickness of the integrated stiffener consistent with the reference model; correct the impact mass using Equation (24) if necessary;
Criterion 3: Maintain the web thickness of the integrated stiffener consistent with the reference model and the ratio P1/Pcr-e to satisfy the empirical equation, Equation (28), and maintain an impact mass consistent with the reference model.
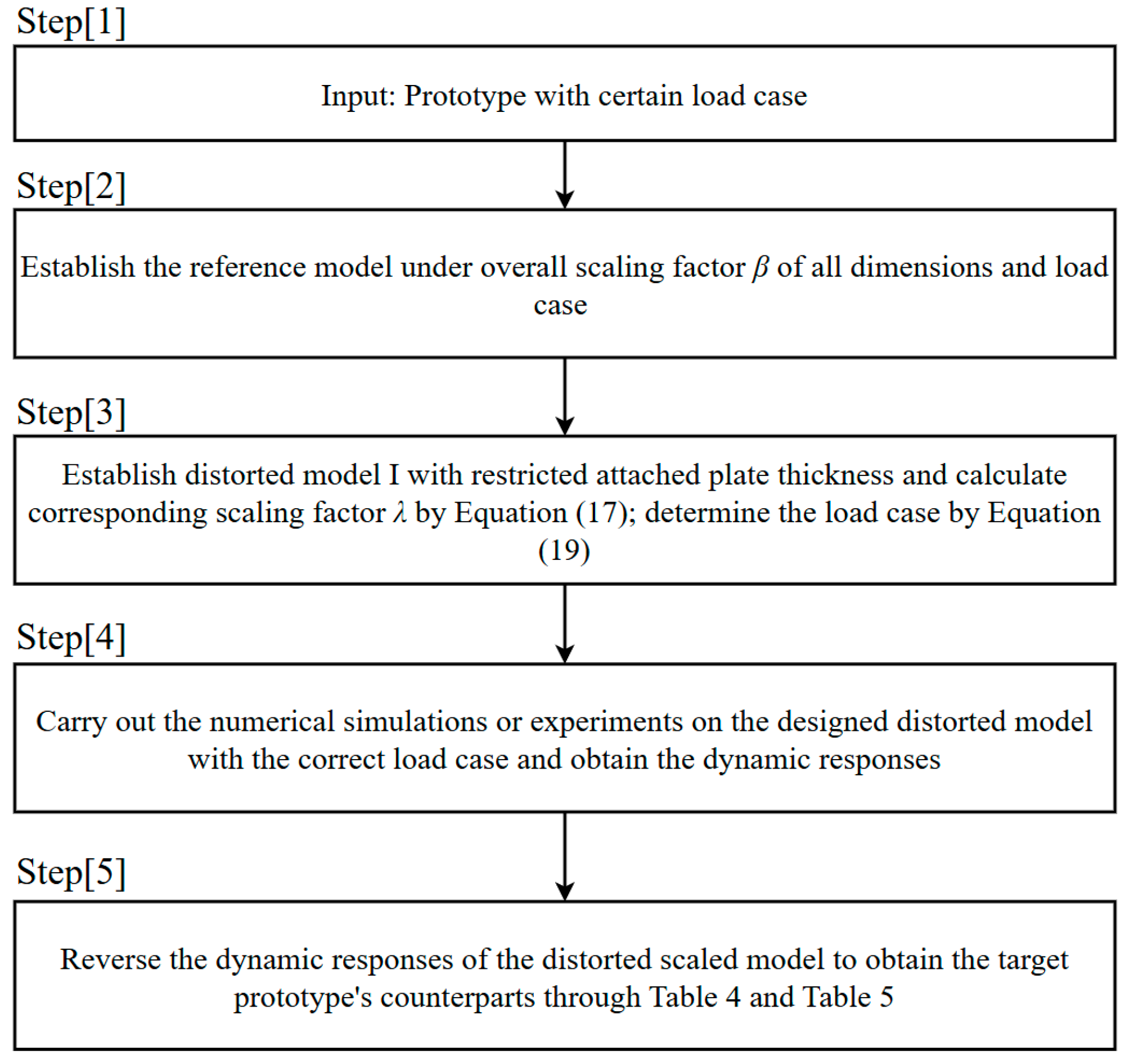
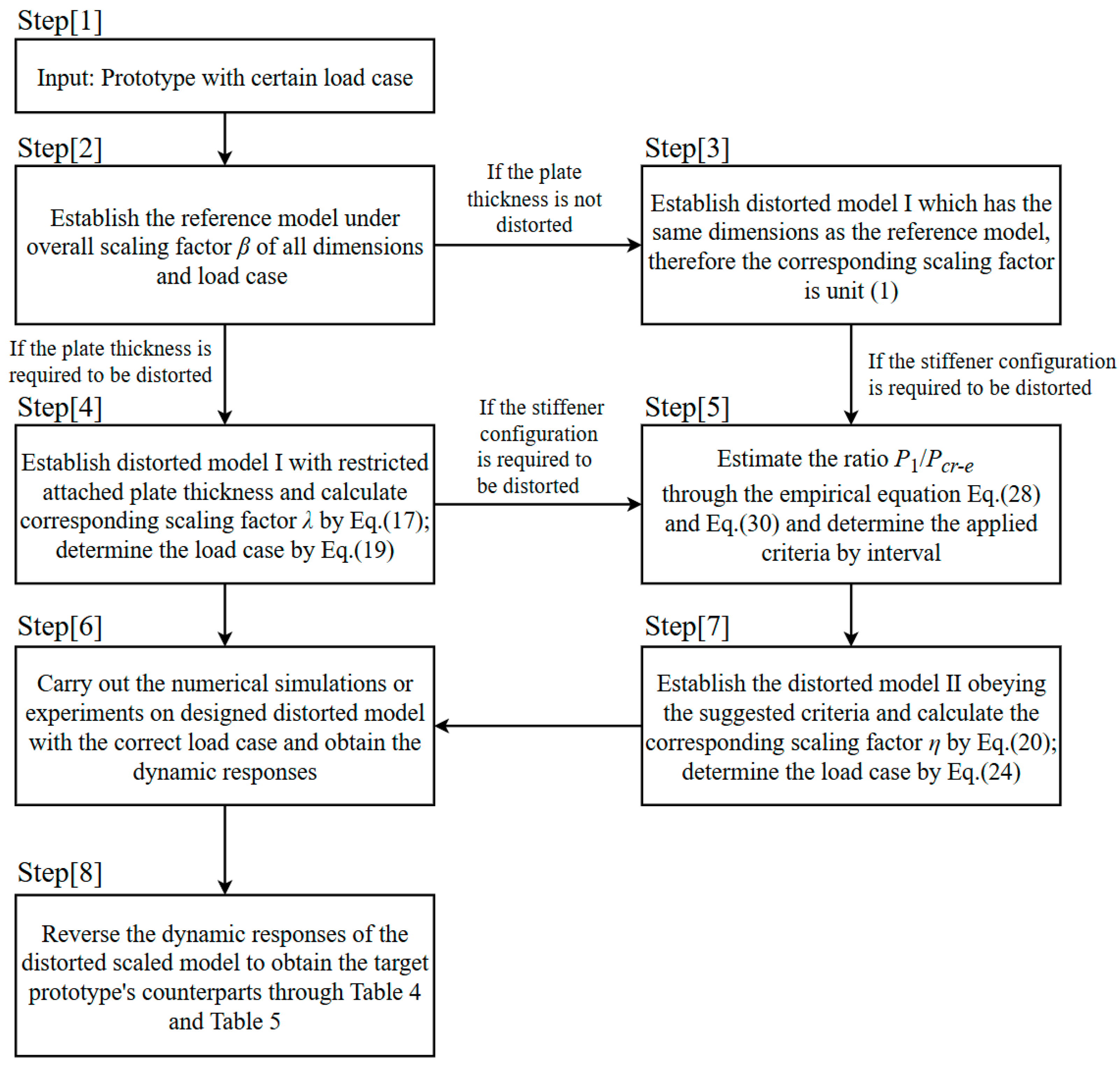
By addressing the complex distortion problem as two separate distortions, the correction procedure illustrated in flowchart
Figure 31 facilitates comprehension and provides a visual representation.
The objective of the similarity procedure is to design a small-scale model exhibiting a reasonably distorted sectional configuration that differs from that of the prototype (
Figure 31 [1]). This design is intended to be practical and attainable in experimental settings, making it convenient for conducting experiments. First of all, the target distorted small-scaled model provides a specific overall scaling factor
β, which is determined as the ratio of the plate length of the prototype structure to the plate length of the target model. To ensure a perfect similarity between the target distorted small-scaled model and the prototype, the reference model is created with the same overall scaling factor
β as the target distorted small-scaled model. This allows for a direct comparison and replication of their structural behavior and responses (
Figure 31 [2]). The dimensions and load case of the reference model were identical, to be perfectly similar to those of the prototype. The related scaling factor between the reference model and prototype can be calculated using classic similarity laws, as presented in
Table 4.
If the target distorted small-scaled model exhibits plate thickness distortion, the first step is to establish a distorted model I to account for the distorted thickness and calculate the corresponding scaling factor λ through Equation (17) (
Figure 31 [4]). Once the designed distorted model I was established by incorporating the distorted plate thickness and stiffener dimensions consistent with the reference model, the next step was to determine the corrected load case for this model. This can be achieved using Equation (19), while ensuring that the impact velocity remains the same as that of the reference model. Subsequently, simulations or experiments are conducted on distorted model I to obtain its dynamic responses (
Figure 31 [6]), which can be reversed to reflect the behavior of the prototype using Equation (17),
Table 4 and
Table 5 (
Figure 31 [8]).
On the basis of distorted model I, if the target distorted small-scaled model features a different stiffener configuration, distorted model II should be established (
Figure 31 [5]). This model maintains the same attached plate thickness as distorted model I but incorporates distorted flat-bar stiffeners whose dimensions are determined, meeting the selected criteria. By utilizing the empirical equations in Equations (25) and (27) to calculate the static concentrated force
P1 and critical buckling force
Pcr-e, a direct method for estimating the dominant behavior in the reference model was established based on the threshold ratio of
P1/
Pcr-e from 1.55 to 3.21. This threshold serves as a criterion for distinguishing between the dominance of the static moment and the web thickness in the model.
For the static moment-dominant structure (
P1/
Pcr-e < 1.55), Criterion 1 ensures that the dimensionless number
(the sectional area) and
(the static moment) are preserved, partially maintaining consistent geometric properties with the distorted model. For the web thickness-dominant structure (
P1/
Pcr-e > 3.21), Criterion 2 was employed, focusing on achieving consistency in the web thickness and sectional area, as per previous studies on web girders. It is important to note that for the intermediate range of P
1/P
cr-e, specifically 1.55 to 3.21, the proposed criteria exhibit significant deviations when predicting the behaviors of the reference model. The empirical method, denoted as Criterion 3, to obtain a distorted model involves designing a proper flat bar that satisfies the empirical ratio
P1/
Pcr-e through Equation (28), while maintaining a consistent web thickness, to achieve a similar tendency in buckling behavior (
Figure 31 [7]).
In the case where the target distorted small-scaled model exhibits distortion solely in the stiffener configuration, the corresponding distorted model I is established with dimensions identical to the reference model, resulting in a series of related scaling factors (
λX) equal to 1, as previously defined (
Figure 31 [3]). Subsequently, this distorted model I is subjected to the same correction procedure to calculate the ratio of
P1/
Pcr-e, as defined earlier (
Figure 31 [5]). By implementing the same correction procedure stated in
Figure 31 [7], distorted model II, featuring flat-bar stiffeners, is designed to meet the proper criteria based on the threshold ratio of
P1/
Pcr-e.
Consequently, the dynamic behaviors of distorted model II faithfully replicate those of distorted model I. Subsequently, the resistance responses can be employed to predict those of the prototype using Equation (17), along with reference to
Table 4 and
Table 5 (
Figure 31 [8]).
6. Conclusions
This paper presents an investigation of an enhanced similarity law governing stiffened plates made of ductile material under impact loads before structural failure, employing an improved approach that incorporates double input parameters encompassing load case and geometry. In comparison to the existing methodologies, this approach offers a rapid and applicable methodology for accurately reproducing the dynamic responses of prototype stiffened plates that consist of thin plates, using distorted scaled models. This method expands the application range of similarity laws and enables distorted scaled models that meet experimental limitations to reflect prototypes’ resistance behaviors.
Two distinct concepts of distorted scaled models were introduced: distorted model I (characterized by a distorted attached plate thickness) and distorted model II (characterized by a distorted stiffener configuration). For the load case input parameters, both distorted models I and II were considered, thereby applying a correction to the impact mass using a factor derived from a dimensionless number associated with the structural mass. Moreover, three design criteria were formulated to govern the geometric attributes of the integrated stiffeners, emphasizing the restricted sectional static moment, area, and web thickness, which align with the corresponding dominant behaviors of the stiffened plate.
To further enhance the designing accuracy of distorted stiffener configurations according to the proposed criteria, an approximate semi-empirical method based on the elastic–plastic theory was introduced. This method employed the ratio P1/Pcr-e, which is linked to two critical forces: one driving the plastic hinge formation in the integrated stiffener section (P1) and the other representing the critical buckling force of the stiffener web plate (Pcr-e). Three distinct intervals of the P1/Pcr-e ratio were introduced, enabling the characterization of the varying dominant behaviors and their corresponding design criteria. Additionally, it is noted that careful discussion is required for the recommended value of the interval of ratio P1/Pcr-e to design the corresponding distorted model for prototypes with extreme dimensions, since it is based on empirical observations.
Thus, the enhanced similarity law demonstrated versatility, reliability, and accuracy through extensive investigations across a wide range of stiffened plates. The comprehensive analysis of dominant behaviors during impact events contributes to an improved understanding of the suitable criteria for designing distorted stiffener configurations.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}