
Study of Tunnel Vehicle GNSS/INS/OD Combination Position Based on Lateral Distance Measurement and Lane Line Constraint

Abstract
1. Introduction
2. Research on Lateral Distance Measurements for Tunnel Vehicle Localization
- (1)
- Classify LiDAR points into surface feature points and line feature points based on curvature, and remove the line feature points.
- (2)
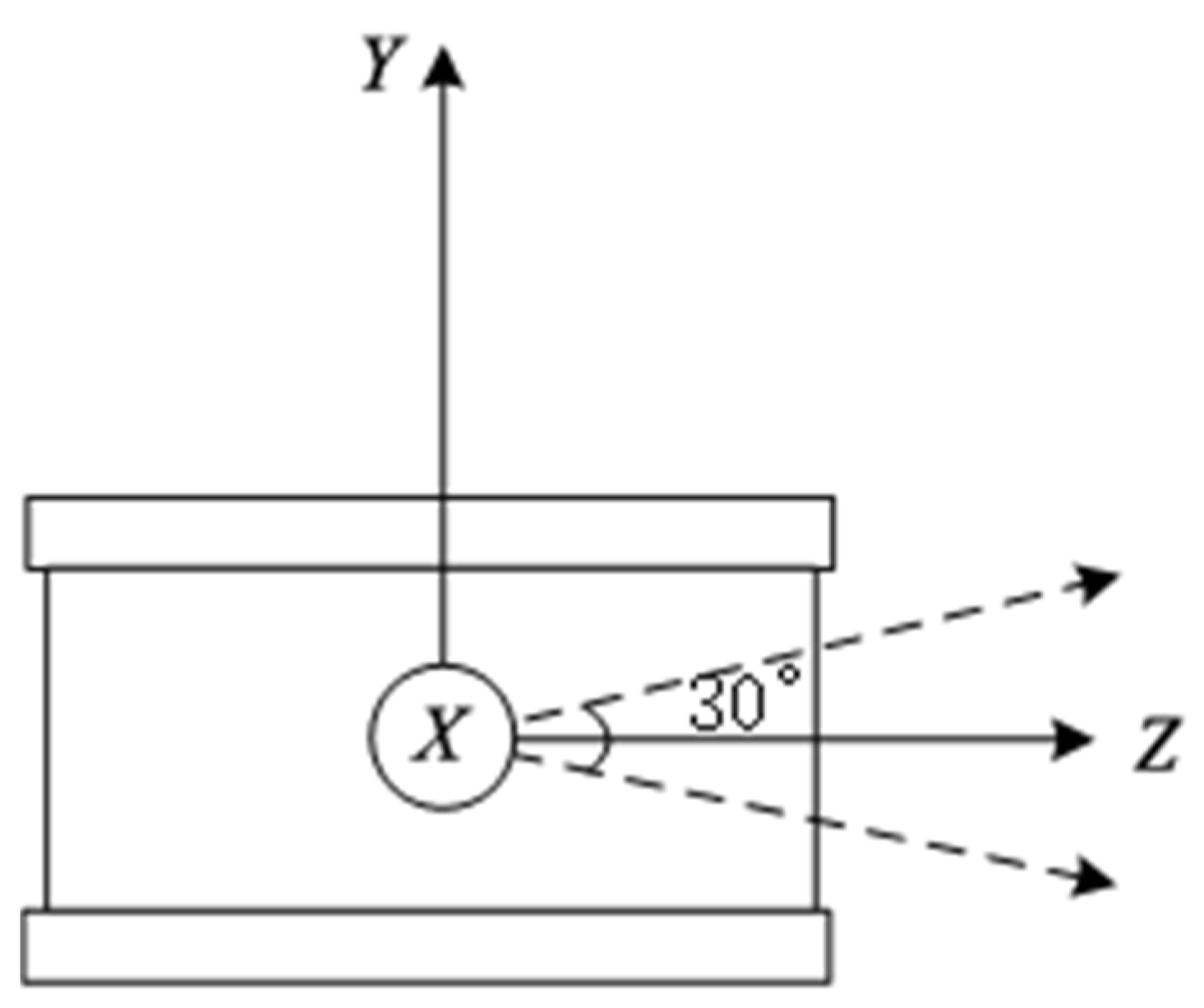
- Calculate the horizontal distance from the LiDAR to obstacles when LiDAR is horizontal and select the m smallest values. These values correspond to the point cloud data that form a set .
- (3)
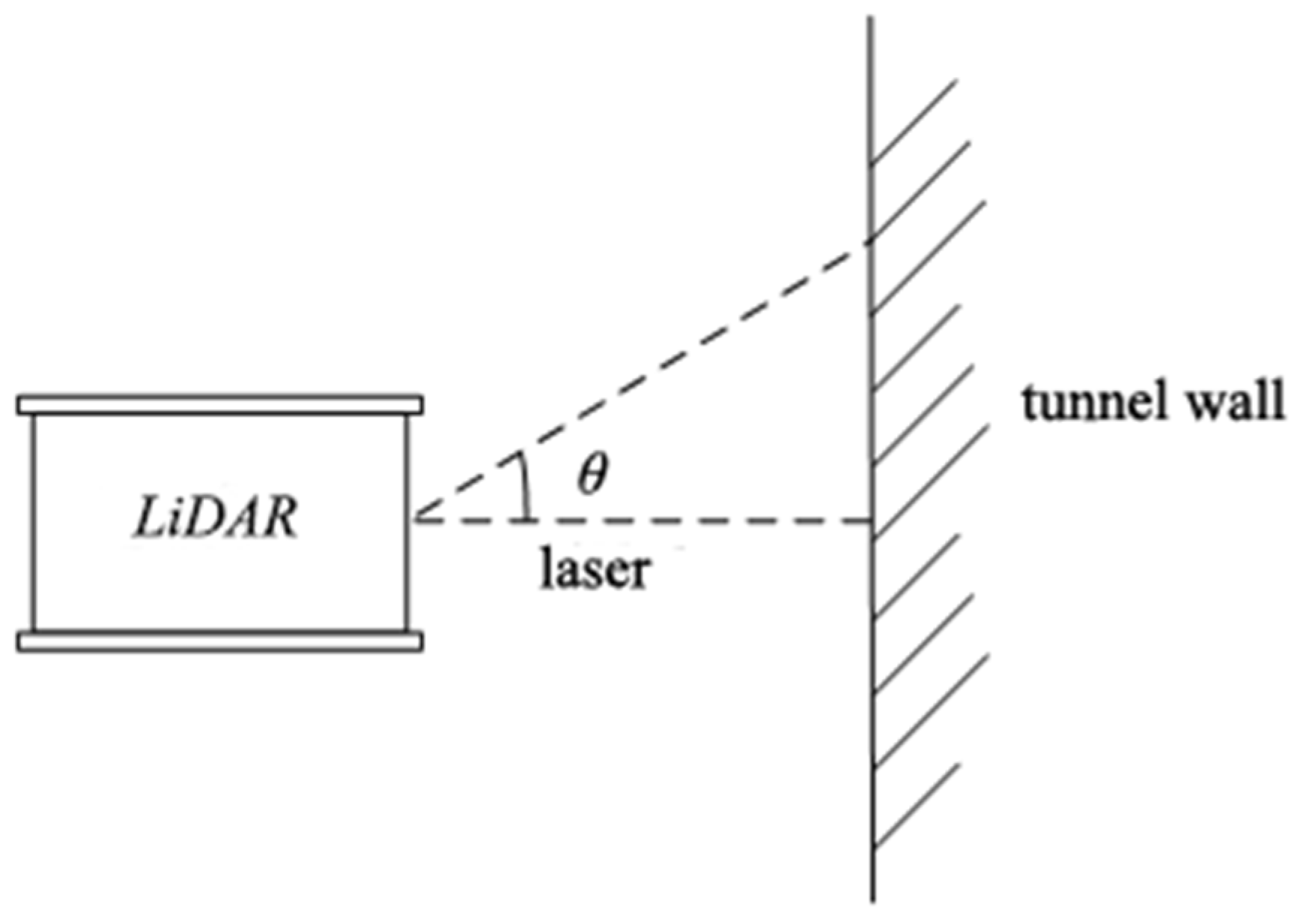
- Calculate the horizontal distance from the LiDAR to obstacles when it is tilted.
- (4)
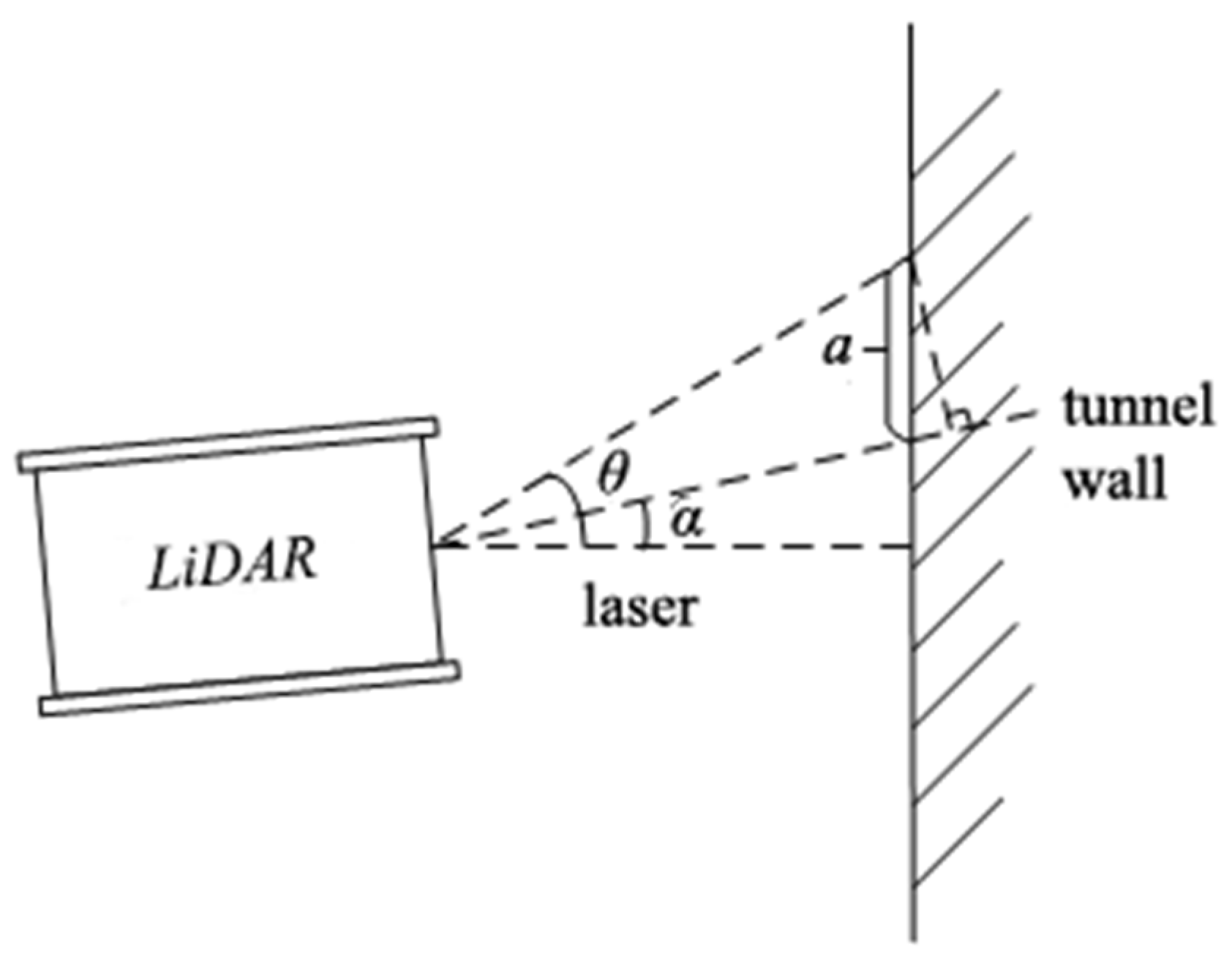
- Calculate the precise horizontal distance between the LiDAR and obstacles.
- (5)
- Calculate the distance from the LiDAR to the other side of the obstacles.
- (6)
- Correction of lateral distance.
3. Combined Positioning of Tunnel Vehicles Constrained by Lane Lines and Lateral Distance
- (1)
- Determine the starting point of the mileage constraint. Before entering the tunnel, according to the GNSS Real-Time Kinematic (RTK) positioning results of the satellite, the corresponding lane line points are geometrically matched in the vertical direction and are recorded as the starting point of the mileage constraint.
- (2)
- Calculate accumulated vehicle mileage. According to the wheel speedometer, the cumulative calculation of vehicle mileage is accumulated by the encoder pulse count of the cumulative mileage meter. Assuming that the cumulative number of pulses of the odometer at a certain time is n, the total cumulative mileage at this time is as follows:where denotes the circumference of the wheel (prior value, unit: m), and represents the perimeter error coefficient in the process of vehicle travel, which is estimated via real-time joint solution calculation with GNSS RTK/INS.
- (3)
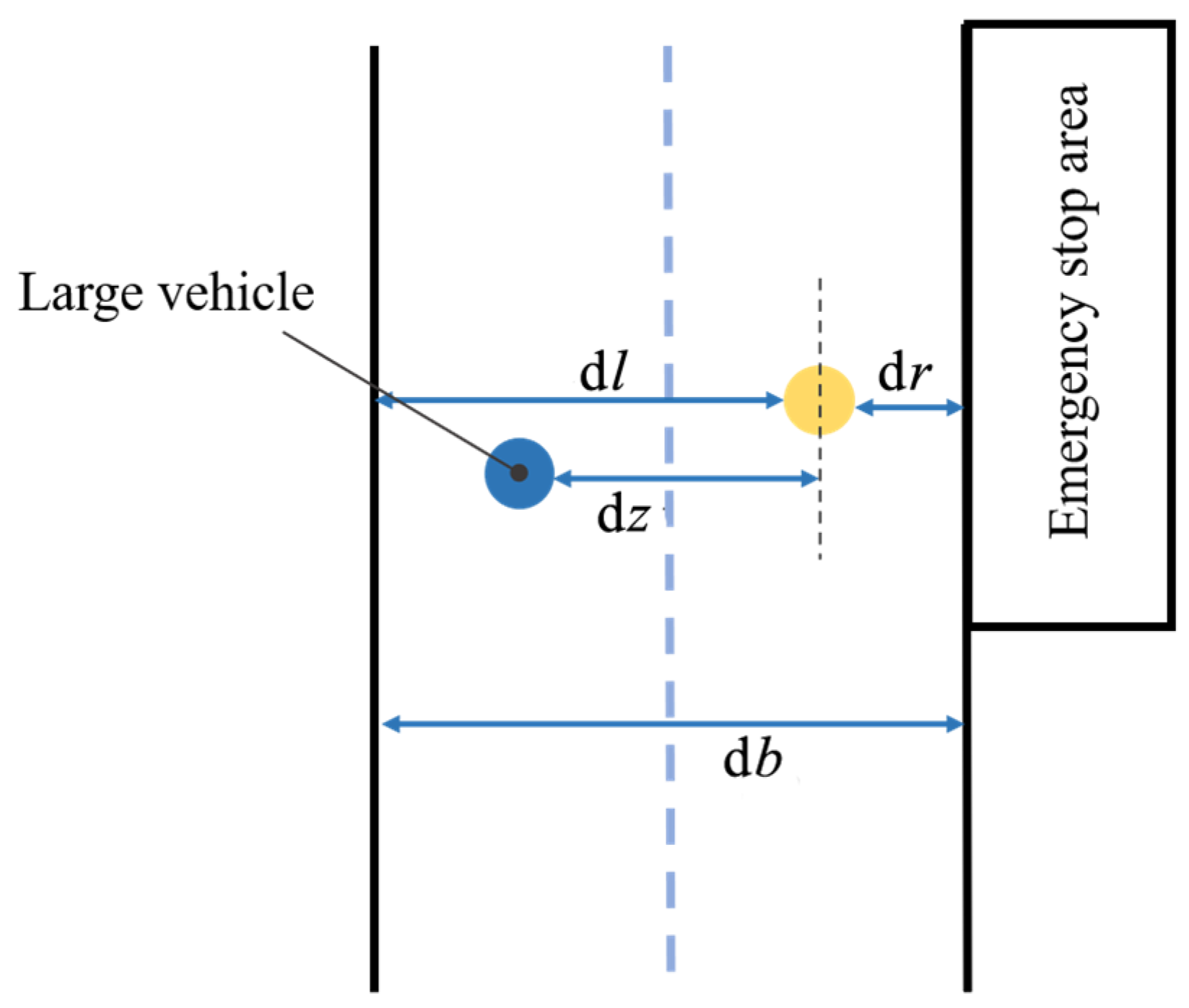
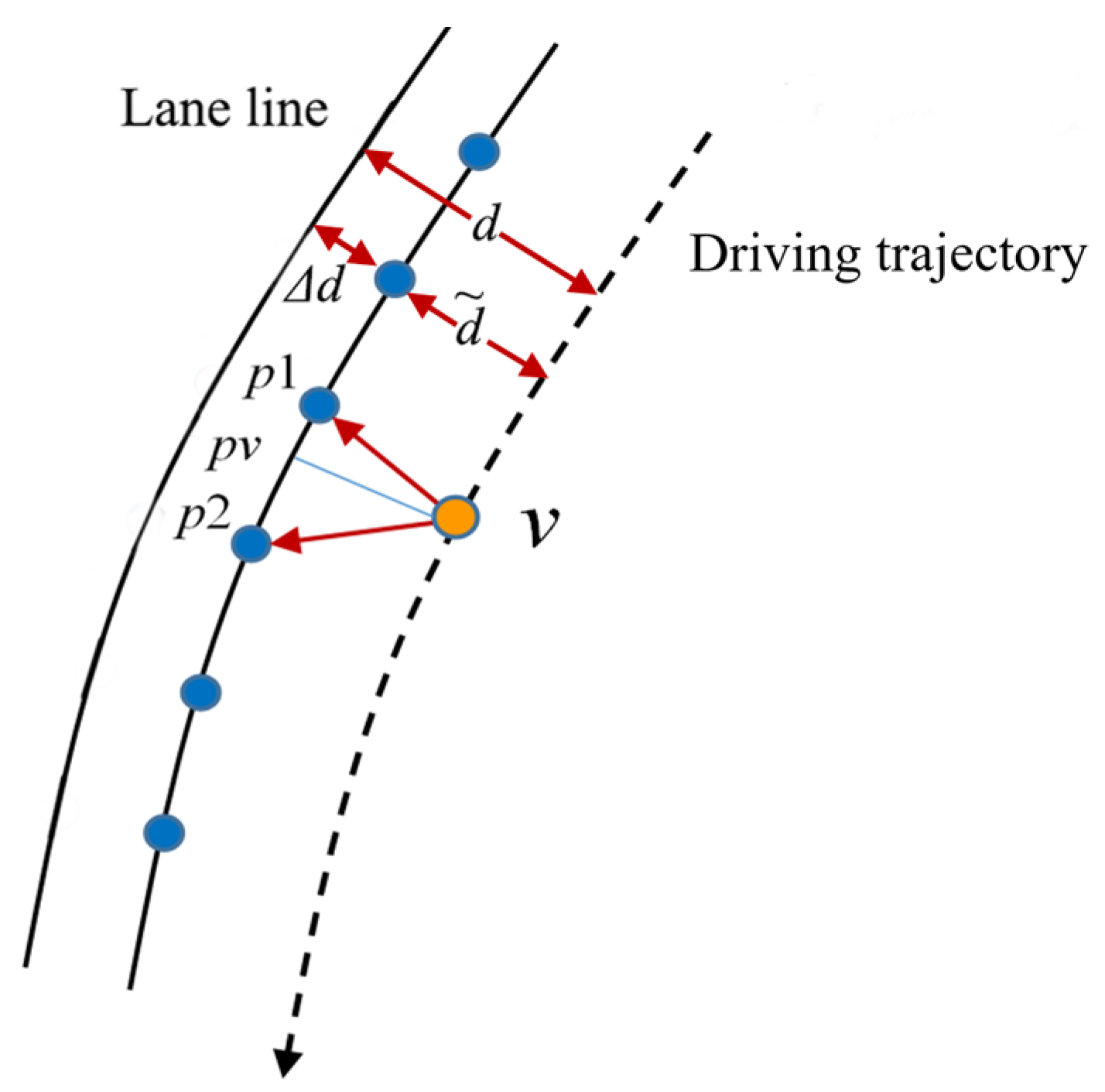
- Calculate the distance between the vehicle and the lane line. In the tunnel, assuming that the distance between the lane line and the tunnel wall remains unchanged (there will be a small change in reality), this is , as shown in Figure 5. The distance between the vehicle and the lane line can be obtained as follows:
- (4)
- Determine the matching points. As shown in Figure 5, the method of matching the corresponding points of lane lines according to the total mileage is as follows:where indicates the previous recent spot number of the match and indicates the nearest point of the latter match; indicates the distance between lane line points (the value in this paper is fixed at 1 m) and indicates the start dot number.
- (5)
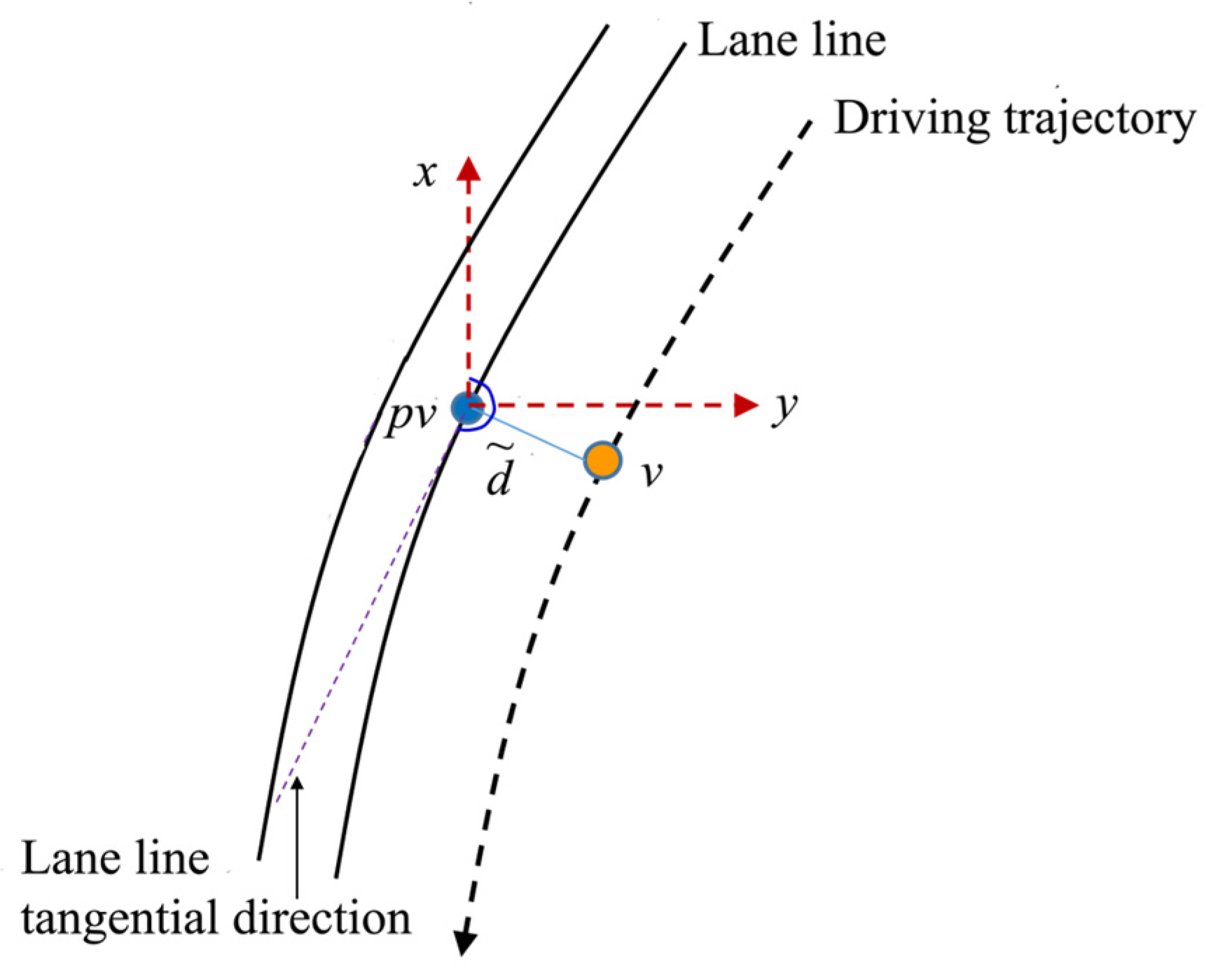
- Calculate the coordinates of vertical points. According to the principle of distance division, the coordinates of vertical point can be obtained as follows:where , indicates the hole down.
- (6)
- According to the lateral distance of the vehicle from the lane line and the azimuth of the point tangent line, the coordinates of the vehicle point () are obtained, as shown in Figure 6 and Formula (14).
4. Case Study of Lateral Distance Measurement
4.1. Static Testing
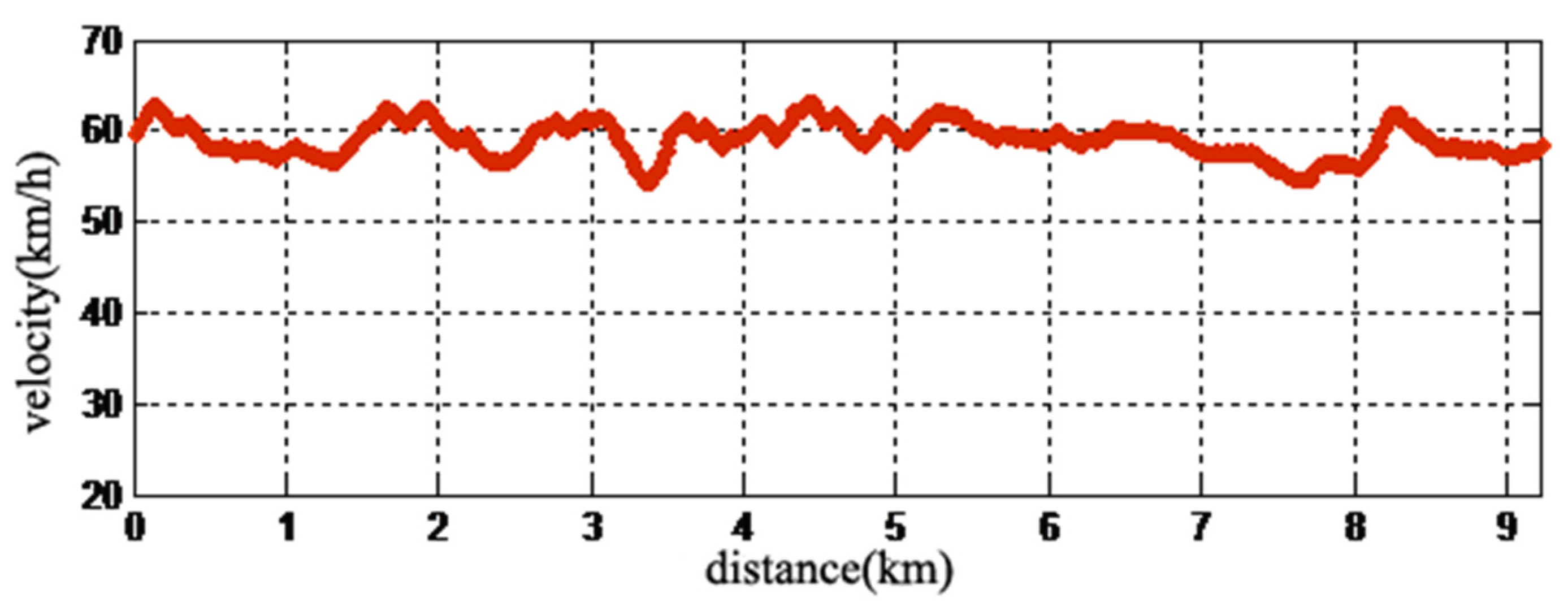
4.2. Dynamic Test
5. Case Study of Combined Positioning in Tunnels
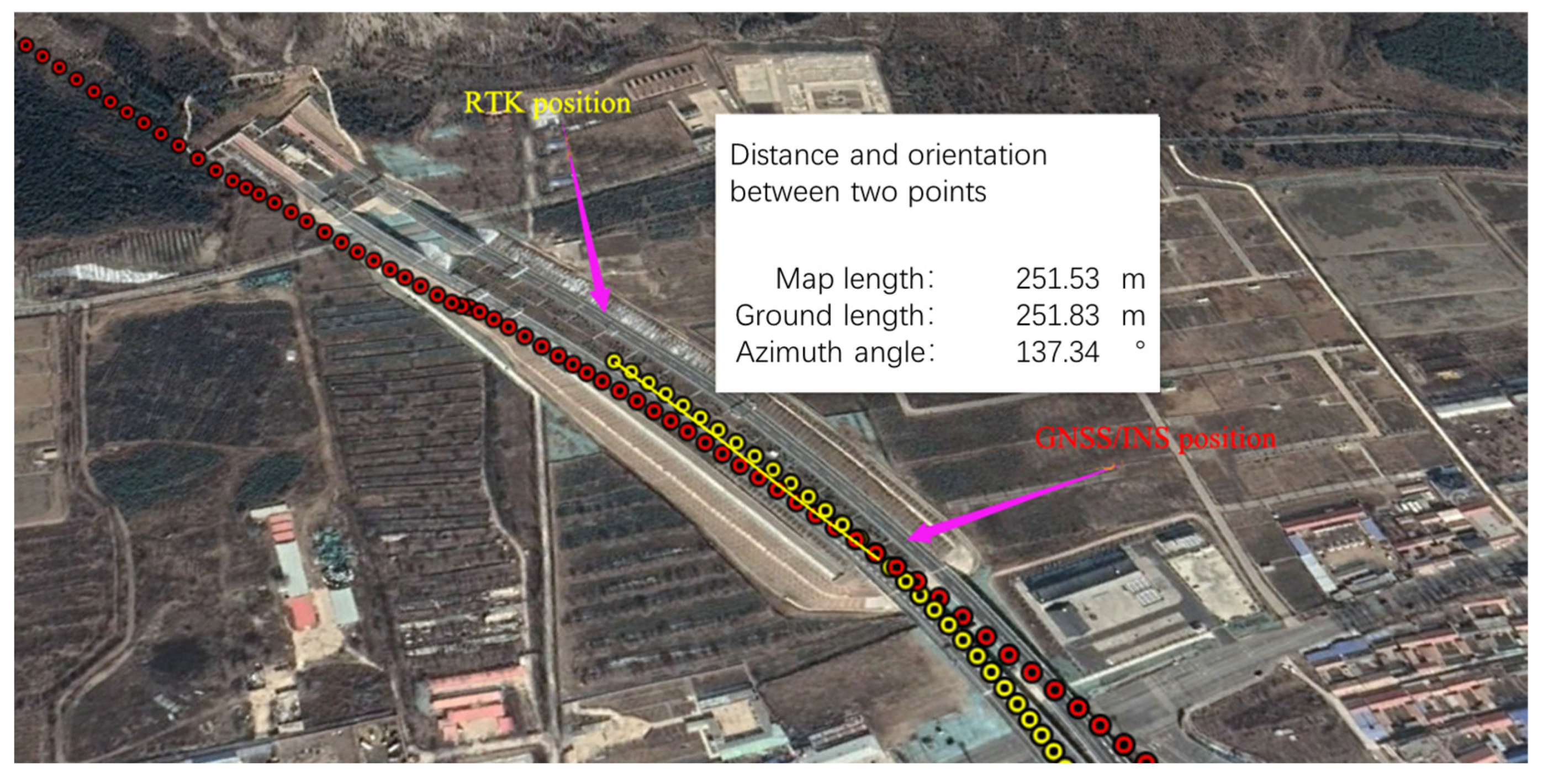
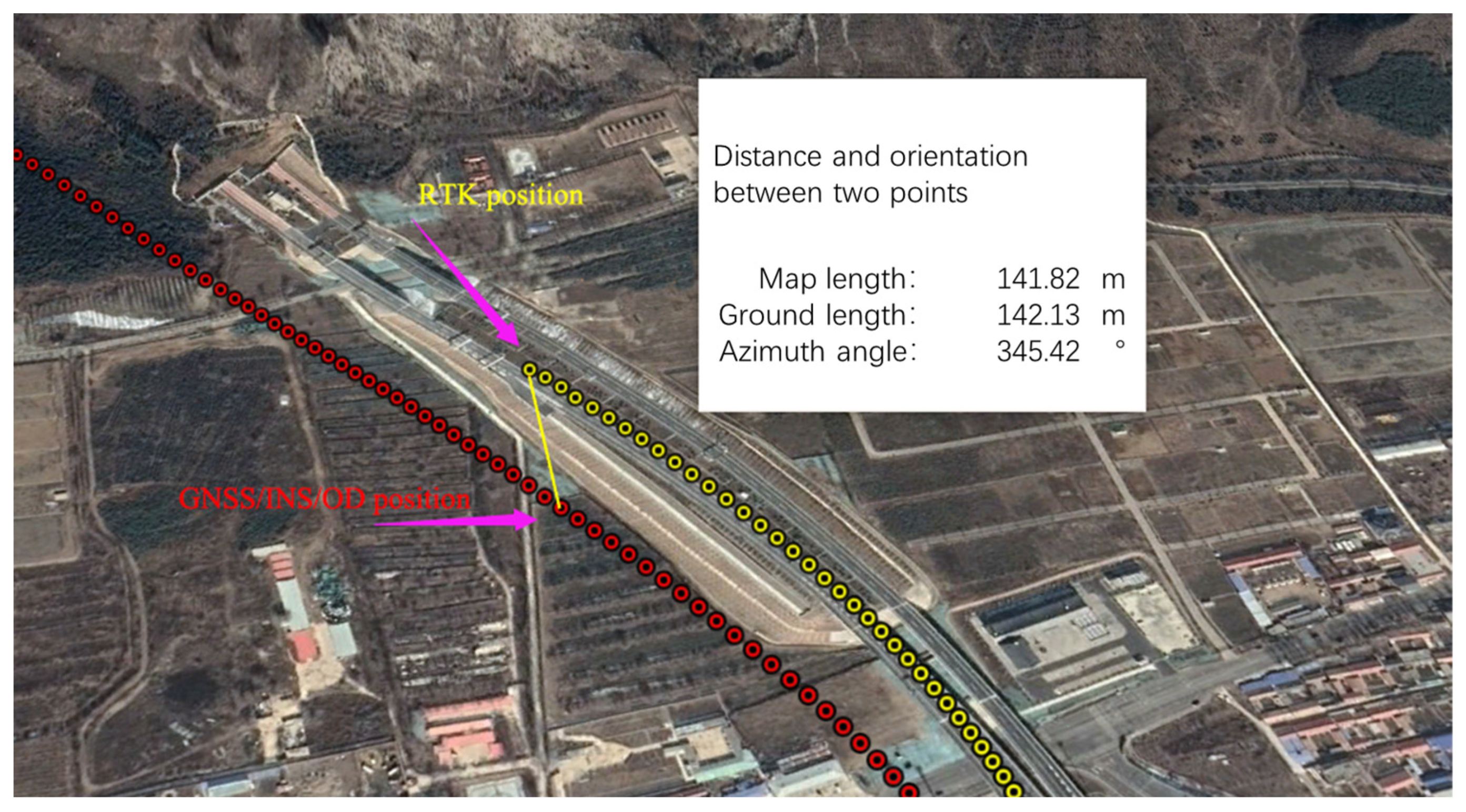
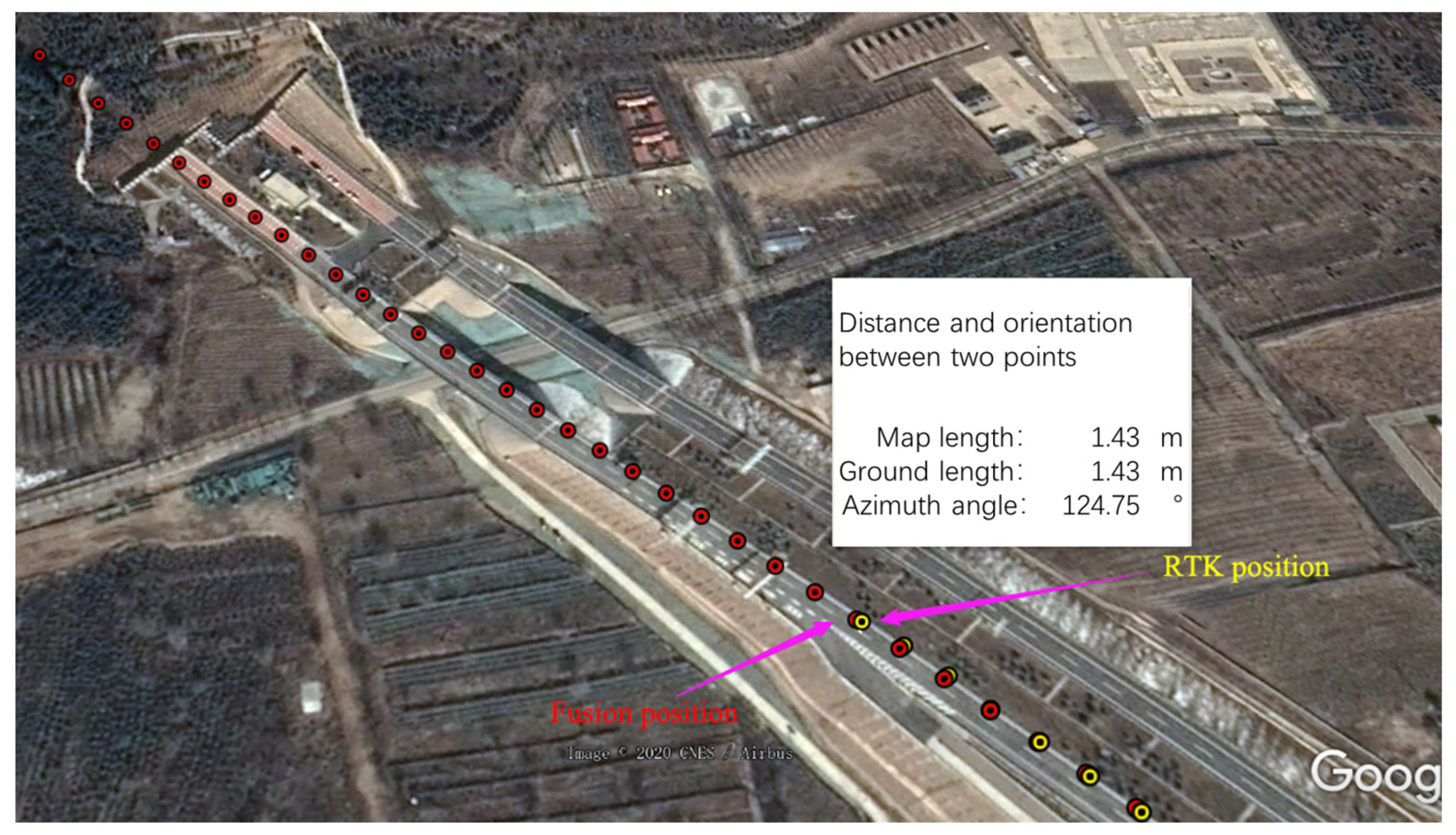
5.1. Comparison of Three Positioning Methods
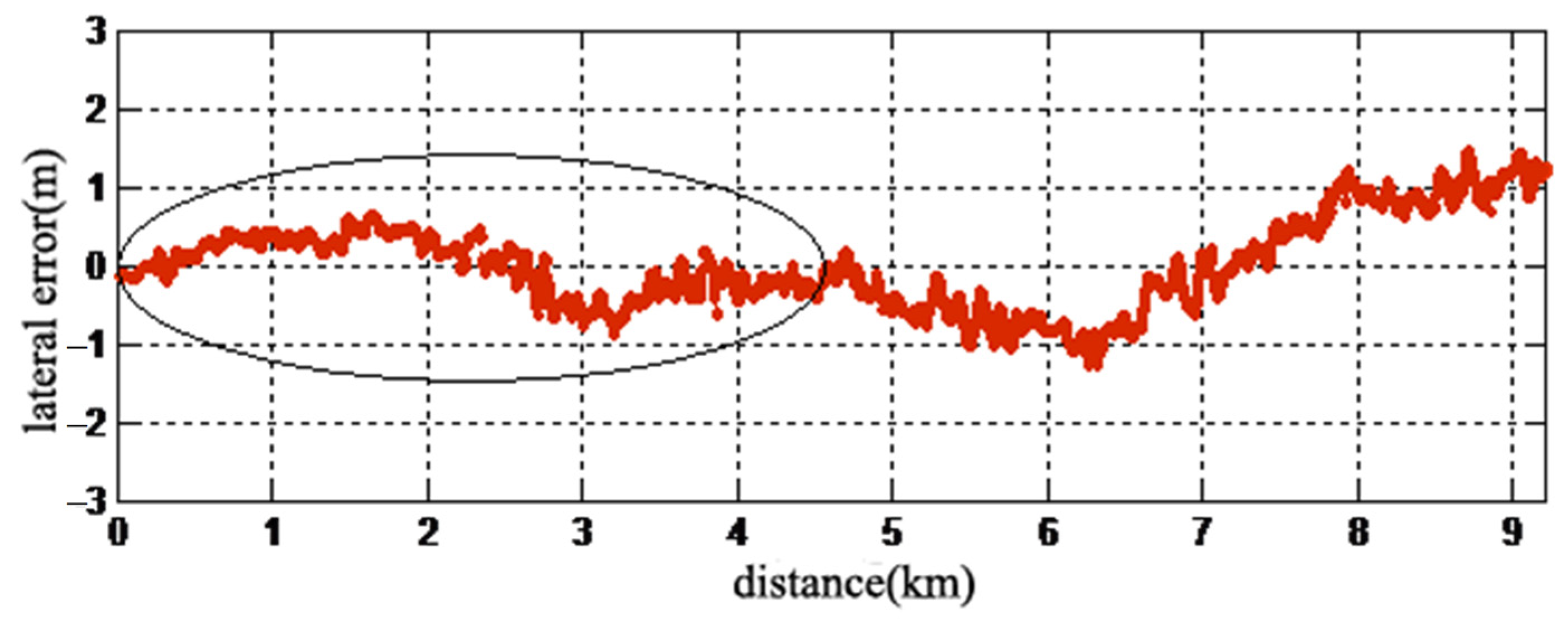
5.2. Analysis of Lateral Positioning Error
5.3. Analysis of Longitudinal Positioning Errors
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- U.S. Department of Transportation. ITS Strategic Plan 2020-2025[EB/OL]. 2020-05-06[2021-04-10]. Available online: https://www.its.dot.gov/stratplan2020 (accessed on 1 March 2024).
- U.S. Department of Transportation. Ensuring American Leadership in Automated Vehicle Technologies: Automated Vehicles 4.0[EB/OL]. 2020-01-08 [2021-04-10]. Available online: https://www.transportation.gov/av/4 (accessed on 1 March 2024).
- Cui, X.Q.; Zhang, X.G.; Chen, H.F. A comparative study on the policy management system of intelligent connected vehicles in China, America and Japan. China Auto 2020, 12, 55–60. [Google Scholar]
- Ministry of Science and Technology of the People’s Republic of China. Intelligent Vehicle Innovation and Development Strategy; Ministry of Science and Technology of the People’s Republic of China: Beijing, China, 2020; pp. 8–9.
- China Association for Science and Technology. Major Scientific and Engineering Problems in 2020; China Association for Science and Technology: Beijing, China, 2020; p. 2. [Google Scholar]
- Zhang, H.; Xiong, H.; Hao, S.; Yang, G.; Wang, M.; Chen, Q. A Novel Multidimensional Hybrid Position Compensation Method for INS/GPS Integrated Navigation Systems During GPS Outages. IEEE Sens. J. 2024, 24, 962–974. [Google Scholar] [CrossRef]
- Zhang, T.; Shi, J.; Lin, T.; Feng, X.; Niu, X. GNSS position-aided delay-locked loops for accurate urban navigation. GPS Solut. J. Glob. Navig. Satell. Syst. 2022, 27, 282–291. [Google Scholar] [CrossRef]
- Seo, Y.-B.; Yu, H.; Yu, M.-J. Calibration Method for INS Based on Multiple Actuator Function. Int. J. Control. Autom. Syst. 2021, 21, 244–256. [Google Scholar] [CrossRef]
- Jiang, C.; Chen, S.; Chen, Y.; Shen, J.; Liu, D.; Bo, Y. Superior Position Estimation Based on Optimization in GNSS. IEEE Commun. Lett. 2021, 25, 479–483. [Google Scholar] [CrossRef]
- Zhang, H.; Xia, X.; Nitsch, M.; Abel, D. Continuous-Time Factor Graph Optimization for Trajectory Smoothness of GNSS/INS Navigation in Temporarily GNSS-Denied Environments. IEEE Robot. Autom. Lett. 2022, 7, 9115–9122. [Google Scholar] [CrossRef]
- He, Y.; Li, J.; Liu, J. Research on GNSS INS & GNSS/INS Integrated Navigation Method for Autonomous Vehicles: A Survey. IEEE Access 2023, 11, 79033–79055. [Google Scholar]
- Chen, Z.; Li, Z.; Chen, W.; Sun, Y.; Ding, X. Wasserstein Distance-Assisted Variational Bayesian Kalman Filter With Statistical Similarity Measure for GNSS/INS Integrated Navigation. IEEE Sens. J. 2024, 24, 8807–8820. [Google Scholar] [CrossRef]
- Gao, W.; Zhan, X.; Yang, R. INS-aiding information error modeling in GNSS/INS ultra-tight integration. GPS Solut. J. Glob. Navig. Satell. Syst. 2024, 28, 35. [Google Scholar] [CrossRef]
- Shangguan, W.; Chen, J.; Xie, C.; Jiang, W. Magnetometer-enhanced Combination Positioning Method Based on IMU Error Compensation. J. China Railw. Soc. 2022, 44, 80–90. [Google Scholar]
- Ke, Y.; Lv, Z.; Zhang, C.; Deng, X.; Zhou, W.; Song, D. Tightly Coupled GNSS/INS Integration Spoofing Detection Algorithm Based on Innovation Rate Optimization and Robust Estimation. IEEE Access 2022, 10, 72444–72457. [Google Scholar] [CrossRef]
- Zhu, Z.; Lu, Y.; Xie, Z. GNSS/INS/Wheel Speed Integrated Positioning Post-Processing Algorithm Based on Iterative Smoothing. Automob. Parts 2022, z1, 41–47. [Google Scholar]
- Zhang, H. Research on High Precision Positioning Technology of Highway Vehicles Based on the Integration of Satellite Navigation, Inertial Navigation and Odometer, Research Report; Institute of Traffic Navigation and Perception, Southeast University, China: Nanjing, China, 2020; pp. 35–36. [Google Scholar]
- Qin, H.; Du, Y. An integrated positioning algorithm of Iridium opportunity signals and MEMS-INS. J. Navig. Position. 2023, 11, 45–52. [Google Scholar]
- Wang, J.; Chen, X.; Shi, C.; Liu, J. An Improved Robust Estimation Method for GNSS/SINS under GNSS-Challenged Environment. In Proceedings of the 2022 11th International Conference on Control, Automation and Information Sciences (ICCAIS), Hanoi, Vietnam, 21–24 November 2022; pp. 79–83. [Google Scholar]
- Lu, W.; Teng, Y.; Yan, X.; Jia, X.; Du, Y. Improved adaptive SRCKF algorithm for GNSS/SINS integrated navigation based on measurement characteristics. J. Chin. Inert. Technol. 2023, 31, 327–334. [Google Scholar]
- Chen, W.; Yang, G.; Tu, Y. A Digital Track Map-Assisted SINS/OD Fusion Algorithm for Onboard Train Localization. Appl. Sci. 2023, 14, 247. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, Z.; Zhou, Z.; Liu, P.; Guo, Q. SINS/ODIntegrated Navigation Algorithm Based on Body Frame Position Increment for Land Vehicles. Math. Probl. Eng. 2018, 2018, 5719472. [Google Scholar]
- Wang, Y.F. Research on Multi-Frequency GNSS/INS/OD Fusion High-Precision Positioning Technology in Urban Environment. Master’s Thesis, Southeast University, Nanjing, China, 2021. [Google Scholar]
- Liu, W.; Nong, Q.; Tao, X.; Zhu, F.; Hu, J. OD/SINS adaptive integrated navigation method with non-holonomic constraints. Acta Geod. Et. Cartogr. Sin. 2022, 51, 9–17. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Number | 1 | 2 | 3 | |||
|---|---|---|---|---|---|---|
| Left | Right | Left | Right | Left | Right | |
| Algorithm results/m | 0.697 | 1.301 | 1.193 | 0.801 | 1.565 | 0.435 |
| Measured results/m | 0.710 | 1.315 | 1.197 | 0.821 | 1.575 | 0.450 |
| Error/m | 0.013 | 0.014 | 0.004 | 0.020 | 0.010 | 0.015 |
| Positioning Method | Reverse 1 | Reverse 2 |
|---|---|---|
| GNSS/INS | 251.53 | 454.55 |
| GNSS/INS/OD | 141.82 | 329.78 |
| Lateral Distance Measurement + Lane Markings + GNSS/INS/OD | 1.43 | 1.23 |
| Statistical Items | Numerical Value |
|---|---|
| Number of data points (200 Hz) | 61,001 |
| Arithmetic mean of errors | 0.013 m |
| Mean absolute error | 0.294 m |
| Root mean square error | 0.332 m |
| Maximum error value | 0.671 m |
| Minimum error value | −0.865 m |
| 95th percentile of absolute error | 0.612 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Zhang, X. Study of Tunnel Vehicle GNSS/INS/OD Combination Position Based on Lateral Distance Measurement and Lane Line Constraint. Appl. Sci. 2024, 14, 4309. https://doi.org/10.3390/app14104309
Zhang H, Zhang X. Study of Tunnel Vehicle GNSS/INS/OD Combination Position Based on Lateral Distance Measurement and Lane Line Constraint. Applied Sciences. 2024; 14(10):4309. https://doi.org/10.3390/app14104309
Chicago/Turabian StyleZhang, Hongbin, and Xu Zhang. 2024. "Study of Tunnel Vehicle GNSS/INS/OD Combination Position Based on Lateral Distance Measurement and Lane Line Constraint" Applied Sciences 14, no. 10: 4309. https://doi.org/10.3390/app14104309
APA StyleZhang, H., & Zhang, X. (2024). Study of Tunnel Vehicle GNSS/INS/OD Combination Position Based on Lateral Distance Measurement and Lane Line Constraint. Applied Sciences, 14(10), 4309. https://doi.org/10.3390/app14104309