

Non-Local Means Hole Repair Algorithm Based on Adaptive Block


Abstract
:1. Introduction
- (1)
- A depth image inpainting algorithm based on NLM is proposed to address the issue of depth image hole repair. The utilization of the NLM algorithm for mitigating noise and speckle artifacts through filtering operations is discussed in [18,19,20,21]. However, the investigations highlighted above primarily concentrate on the realm of filtering procedures and have not encompassed the integration of the NLM algorithm within the context of depth image for hole restoration.
- (2)
- By introducing intelligent block factors, we enable the automatic determination of optimal search and repair patch sizes for voids of different dimensions, resulting in a significant reduction of the intricate debugging efforts in engineering applications. The strategy of improving the performance of the algorithm by manipulating the pixel weights is discussed in [5,14,15,16,17]. Nonetheless, it is worth noting that the acquisition of these weights relies predominantly on manual calibration, a process that demands a substantial investment of time.
2. Depth Image Inpainting Algorithm
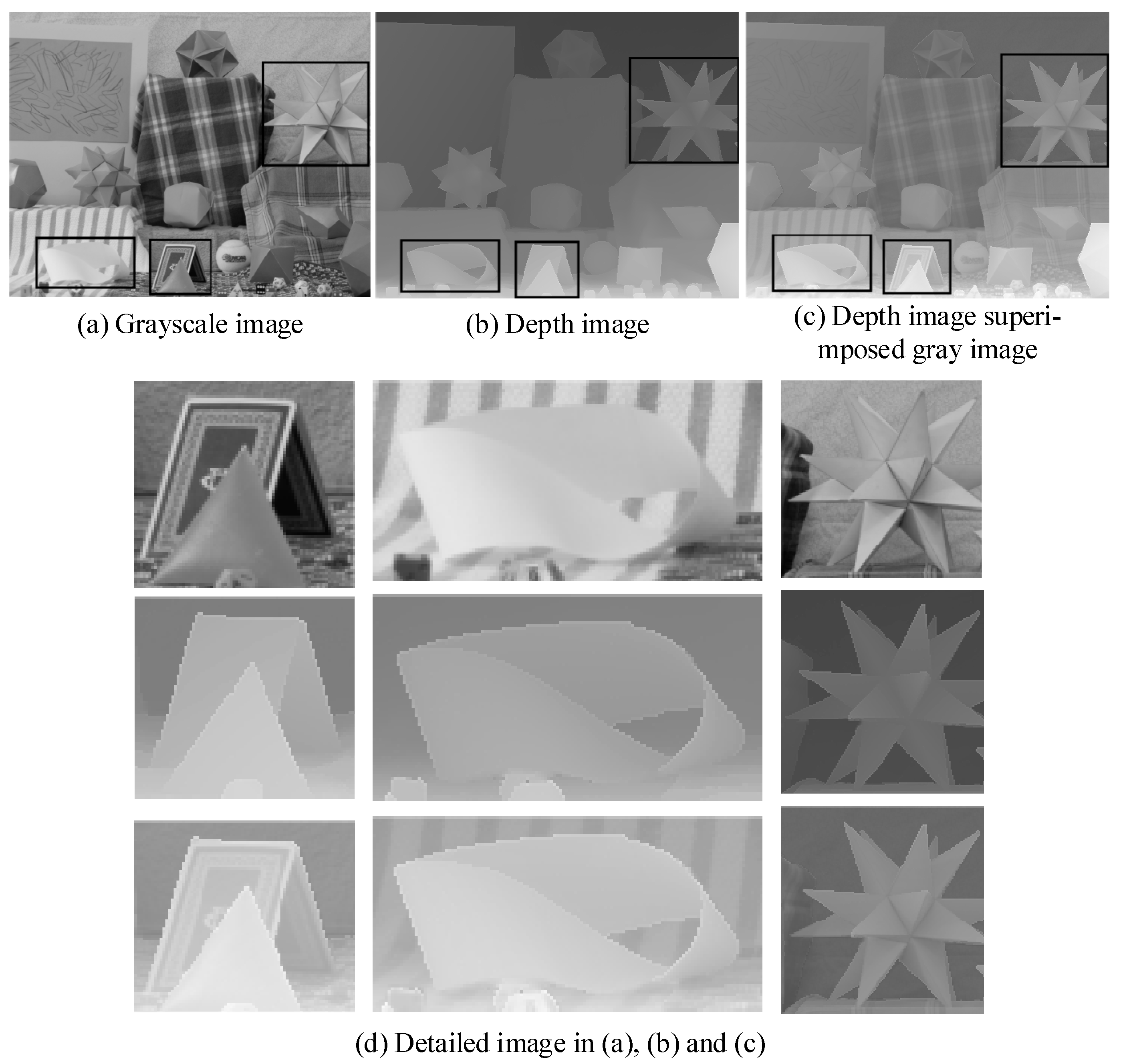
2.1. Image Preprocessing
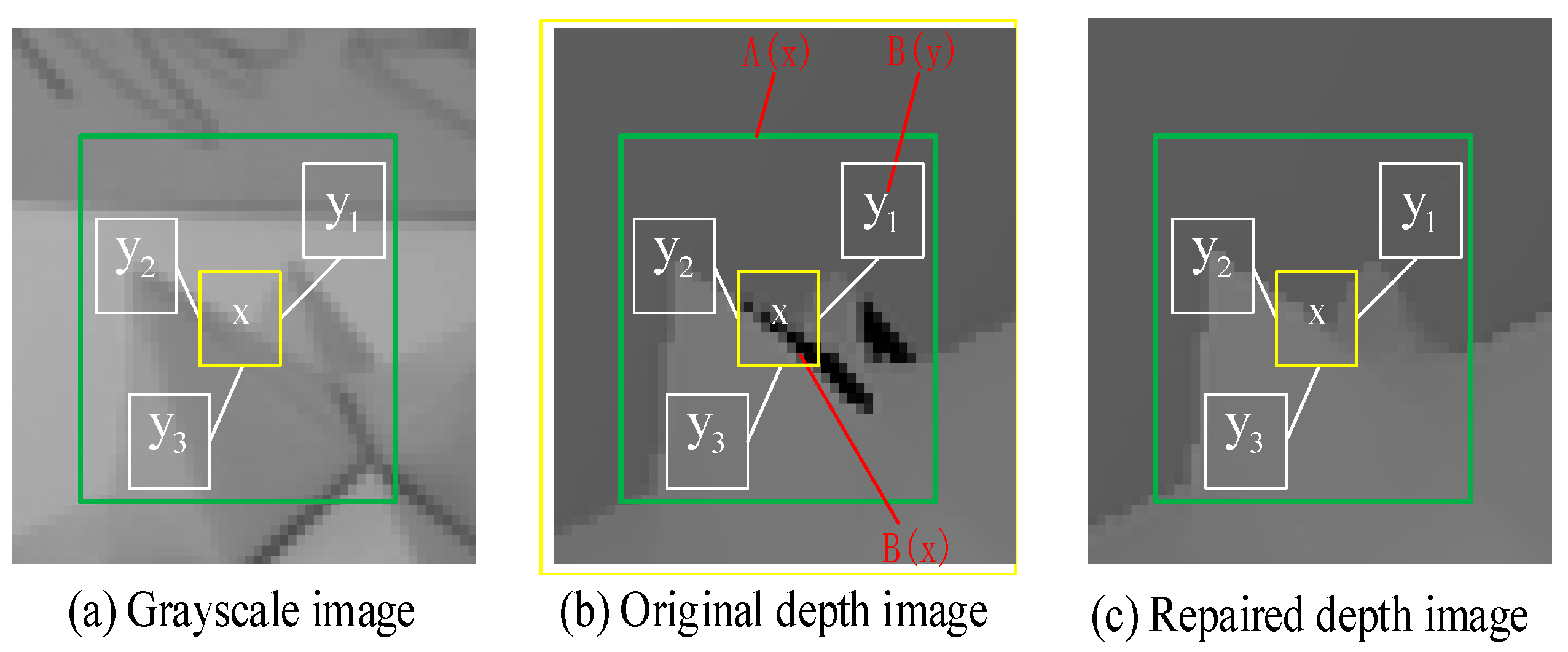
2.2. Hole Filling Algorithm Based on Non-Local Means
2.3. Algorithm Improvement
3. Experimental Results and Analysis
3.1. Qualitative Evaluation
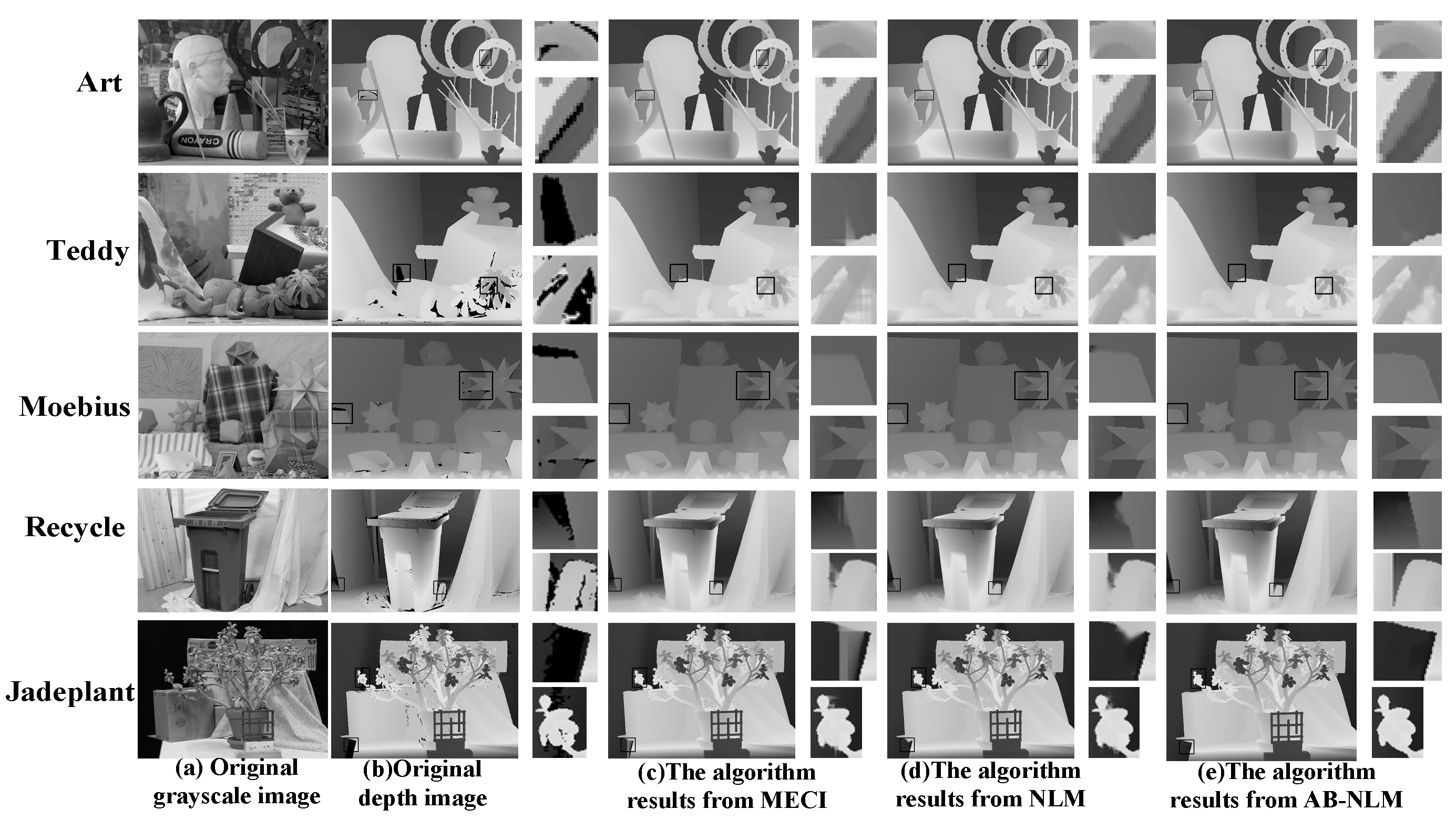
3.1.1. Result on Middlebury Database
3.1.2. Result on Orbbec Depth Camera Data
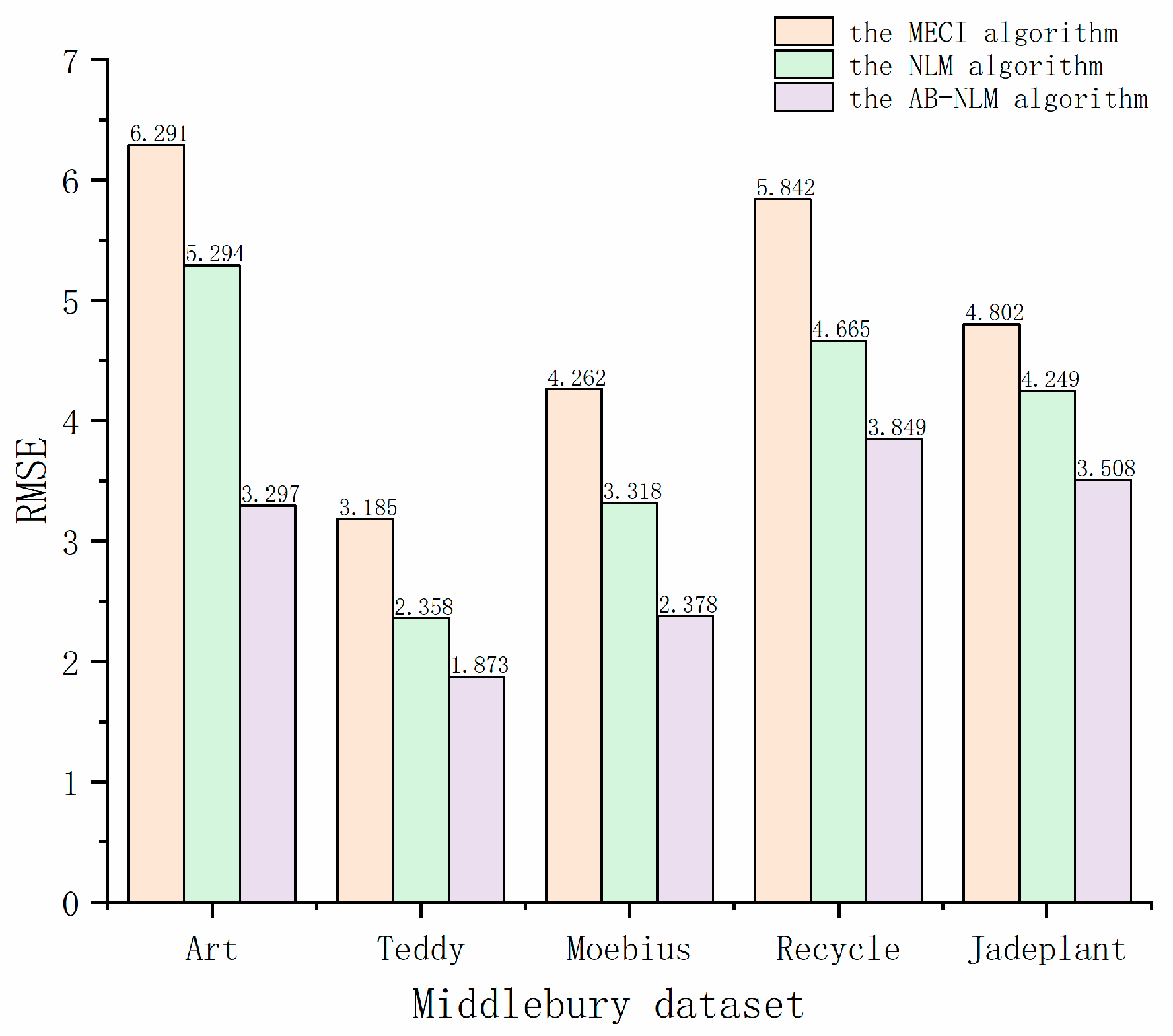
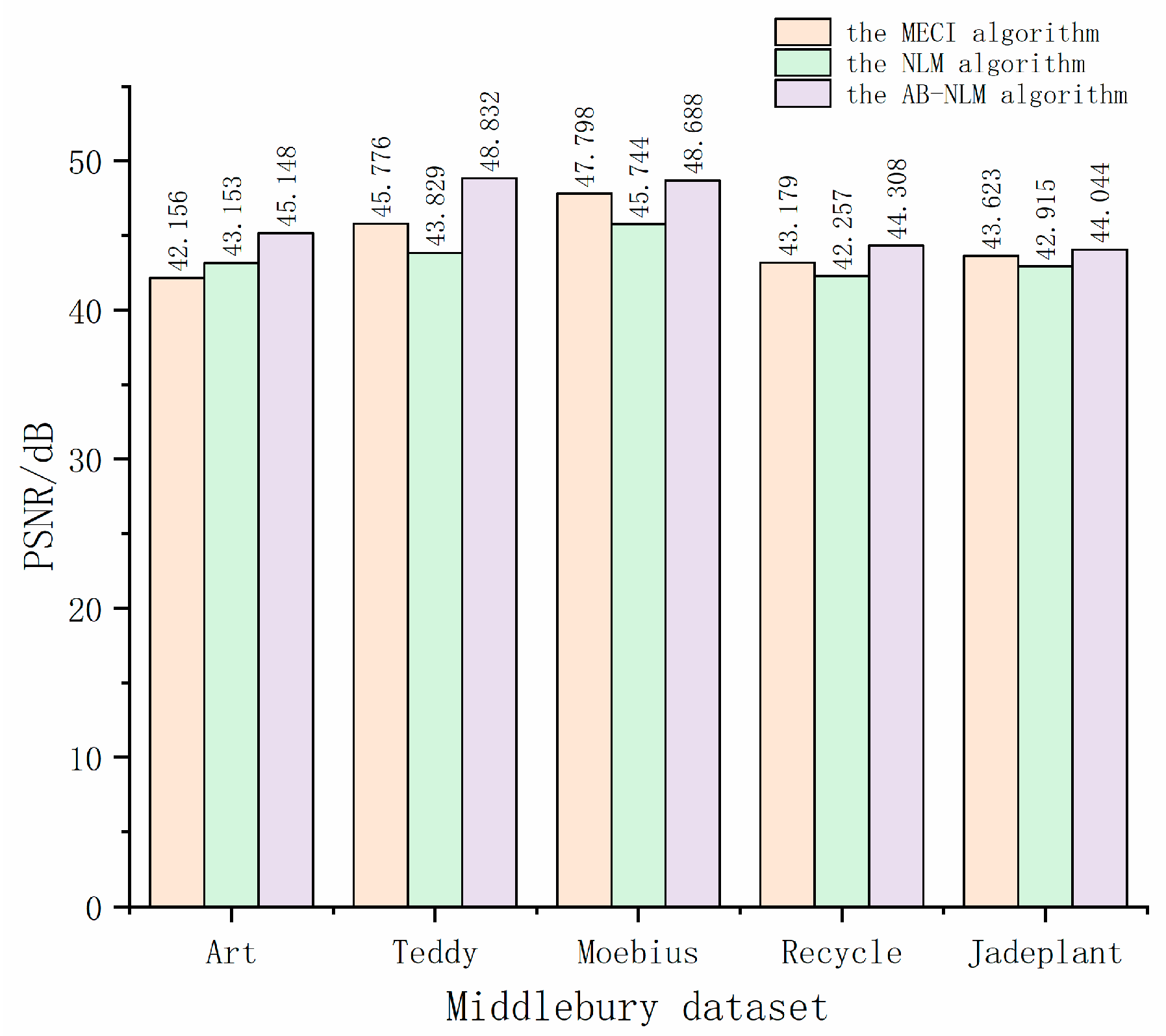
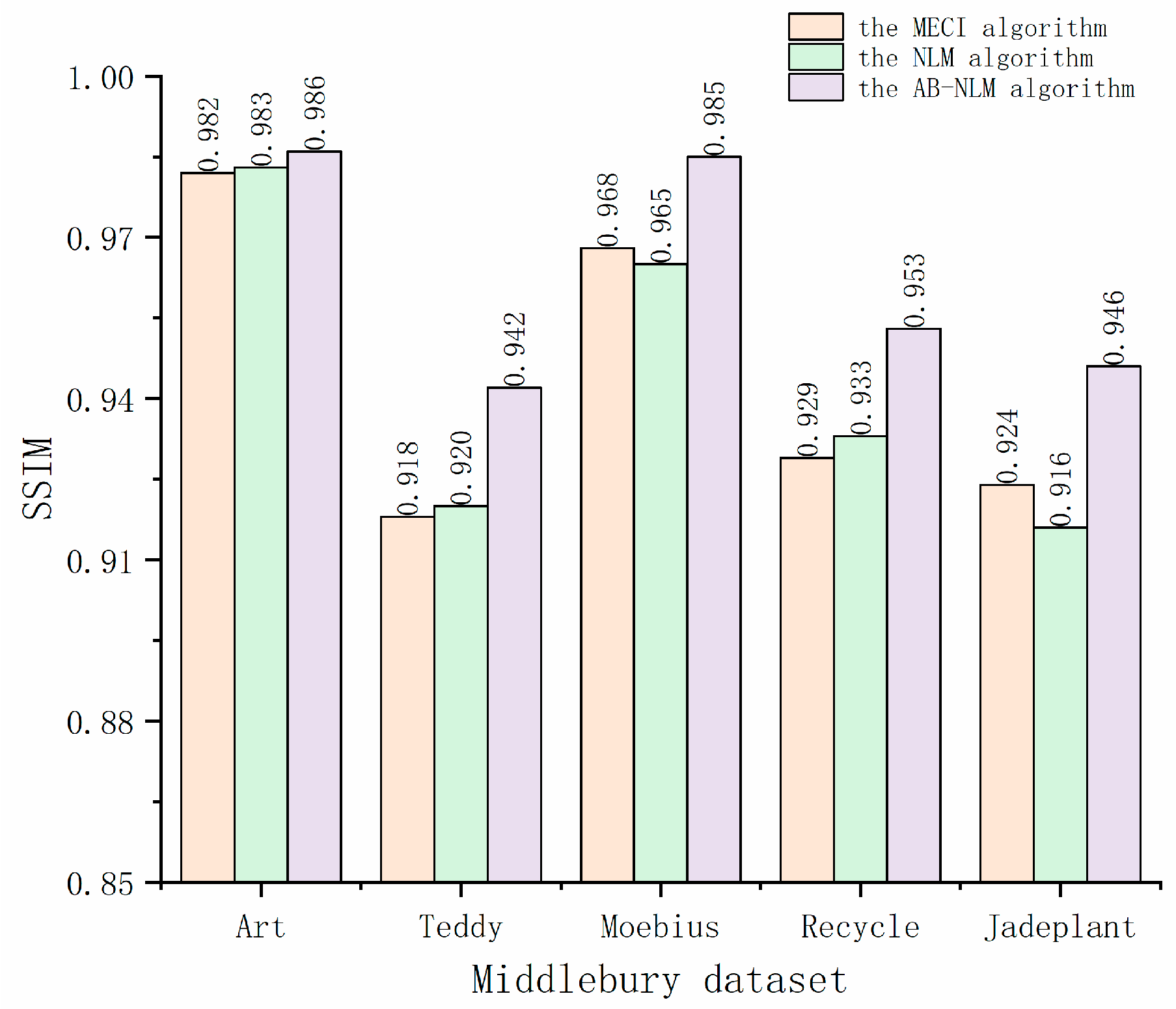
3.2. Quantitative Evaluation
4. Conclusions
- (1)
- Through an extensive series of experimental investigations, it has been ascertained that the algorithm proposed within the context of this study exhibits certain deficiencies in the realm of transparent object depth restoration. Consequently, a prospective avenue for further inquiry entails the formulation of algorithms capable of addressing the task of transparent object depth restoration.
- (2)
- As the proportion of missing regions in the image gradually increases, the restoration effectiveness of various methods, including the algorithm proposed in this paper, will decrease. This is manifested by varying degrees of distortion at the restoration locations. Regardless of whether based on traditional algorithms or deep learning-based approaches, the fundamental principle of image restoration involves filling in the missing regions using known information in a certain manner. Naturally, better restoration results are achieved when the unknown regions are minimized. However, when the proportion of masked areas becomes excessively large, the limited amount of known information cannot adequately support the predictive function of the restoration algorithm. Therefore, in the future, the incorporation of the concept of style transfer will be explored. Particularly for large-scale restoration, combining image-style prior information with the idea of style transfer will be considered. Two models will synchronize output features and mutually supervise each other, thereby enhancing the model’s capability to restore large-scale missing regions.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| NLM | Non-local means |
| AB-NLM | Adaptive Block-based Non-local means |
| MECI | Multiple Edge Converge Inpainting |
| RMSE | Root Mean Square Error |
| PSNR | Peak Signal-to-Noise Ratio |
| SSIM | Structural Similarity Index |
| DE | Depth Error |
| ALME | Average Local Mean Error |
| ndisp | number of disparities |
References
- Roman-Rivera, L.-R.; Sotelo-Rodríguez, I.; Pedraza-Ortega, J.C.; Aceves-Fernandez, M.A.; Ramos-Arreguín, J.M.; Gorrostieta-Hurtado, E. Reduced Calibration Strategy Using a Basketball for RGB-D Cameras. Mathematics 2022, 10, 2085. [Google Scholar] [CrossRef]
- Wang, H.; Guo, E.; Chen, F.; Chen, P. Depth Completion in Autonomous Driving: Adaptive Spatial Feature Fusion and Semi-Quantitative Visualization. Appl. Sci. 2023, 13, 9804. [Google Scholar] [CrossRef]
- Ceccarelli, A.; Secci, F. RGB Cameras Failures and Their Effects in Autonomous Driving Applications. IEEE Trans. Dependable Secur. Comput. 2023, 20, 2731–2745. [Google Scholar] [CrossRef]
- Cong, Y.; Chen, R.; Ma, B.; Liu, H.; Hou, D.; Yang, C. A Comprehensive Study of 3-D Vision-Based Robot Manipulation. IEEE Trans. Cybern. 2023, 53, 1682–1698. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Zhang, X.; Zhou, X.; Chen, I.-M. UPG: 3D vision-based prediction framework for robotic grasping in multi-object scenes. Knowl.-Based Syst. 2023, 270, 110491. [Google Scholar] [CrossRef]
- Alhamazani, F.; Lai, Y.-K.; Paul; Rosin, L. 3DCascade-GAN: Shape completion from single-view depth images. Comput. Graph. 2023, 115, 412–422. [Google Scholar] [CrossRef]
- Kim, W.; Luong, T.; Ha, Y.; Doh, M.; Yax, J.F.M.; Moon, H. High-Fidelity Drone Simulation with Depth Camera Noise and Improved Air Drag Force Models. Appl. Sci. 2023, 13, 10631. [Google Scholar] [CrossRef]
- Herrera-Granda, E.P.; Torres-Cantero, J.C.; Rosales, A.; Peluffo-Ordóñez, D.H. A Comparison of Monocular Visual SLAM and Visual Odometry Methods Applied to 3D Reconstruction. Appl. Sci. 2023, 13, 8837. [Google Scholar] [CrossRef]
- Cheng, S.; Sun, C.; Zhang, S.; Zhang, D. SG-SLAM: A Real-Time RGB-D Visual SLAM Toward Dynamic Scenes with Semantic and Geometric Information. IEEE Trans. Instrum. Meas. 2023, 72, 7501012. [Google Scholar] [CrossRef]
- Sun, C.; Wu, X.; Sun, J.; Sun, C.; Xu, M.; Ge, Q. Saliency-Induced Moving Object Detection for Robust RGB-D Vision Navigation Under Complex Dynamic Environments. IEEE Trans. Intell. Transp. Syst. 2023, 24, 10716–10734. [Google Scholar] [CrossRef]
- Xiang, S.; Deng, H.; Zhu, L. Exemplar-based depth inpainting with arbitrary-shape patches and cross-modal matching. Signal Process. Image Commun. 2019, 71, 56–65. [Google Scholar] [CrossRef]
- Criminisi, A.; Pérez, P.; Toyama, K. Region filling and object removal by exemplar-based image inpainting. IEEE Trans. Image Process. 2004, 9, 1200–1212. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Xia, H.; Qiao, Y. Texture synthesis repair of RealSense D435i depth images with object-oriented RGB image segmentation. Sensors 2020, 23, 6725. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X. A modified non-local means using bilateral thresholding for image denoising. Multimed. Tools Appl. 2023. [Google Scholar] [CrossRef]
- Wang, L.; Liao, C.; Yao, R. Fixing algorithm of Kinect depth image based on non-local means. Multimed. Tools Appl. 2023, 1–20. [Google Scholar] [CrossRef]
- Cheng, J.; Xie, Y.; Zhou, S.; Lu, A.; Peng, X.; Liu, W. Improved Weighted Non-Local Mean Filtering Algorithm for Laser Image Speckle Suppression. Micromachines 2023, 1, 98. [Google Scholar] [CrossRef]
- Deshe, G.; Abookasis, D. Imaging targets hidden in scattering and viscous liquid-based media by combining multiple projections and applying a non-local mean filtering algorithm. Optik 2021, 247, 167988. [Google Scholar] [CrossRef]
- Wu, J.; Gomez, L.; Frery, A.C. A Non-Local Means Filters for Sar Speckle Reduction with Likelihood Ratio Test; IEEE International Geoscience and Remote Sensing Symposium: Kuala Lumpur, Malaysia, 2022; pp. 2319–2322. [Google Scholar]
- Zhang, X.; Li, M.; Liu, X.; Zhou, Z.; Wang, X.; Xu, Z. An improved wavelet denoising algorithm for SAR interferogram using fast non-local means filtering. Geocarto Int. 2022, 37, 18600–18617. [Google Scholar] [CrossRef]
- Manjón, J.V.; Coupé, P.; Martí-Bonmatí, L.; Collins, D.L.; Robles, M. Adaptive non-local means denoising of MR images with spatially varying noise levels. J. Magn. Reson. Imaging 2010, 31, 1053–1807. [Google Scholar] [CrossRef]
- Gastal, E.S.L.; de Oliveira Neto, M.M. Adaptive manifolds for real-time high-dimensional filtering. ACM Trans. Graph. (TOG) 2012, 31, 1–13. [Google Scholar] [CrossRef]
- Wang, R.; Liang, D.; Cao, X.; Guo, Y. Semantic Correspondence with Geometric Structure Analysis. ACM Trans. Multimed. Comput. Commun. Appl. 2021, 17, 21. [Google Scholar] [CrossRef]
- Bao, W.; Wang, W.; Xu, Y.; Guo, Y.; Hong, S.; Zhang, X. InStereo2K: A large real dataset for stereo matching in indoor scenes. Sci. China Inf. Sci. 2023, 63, 212101. [Google Scholar] [CrossRef]
- Vila, O.; Boada, I.; Raba, D.; Farres, E. A Method to Compensate for the Errors Caused by Temperature in Structured-Light 3D Cameras. Sensors 2021, 21, 2073. [Google Scholar] [CrossRef] [PubMed]
- Köhler, N.A.; Nöh, C.; Geis, M.; Kerzel, S.; Frey, J.; Groß, V.; Sohrabi, K. Influence of Ambient Factors on the Acquisition of 3-D Respiratory Motion Measurements in Infants—A Preclinical Assessment. IEEE Trans. Instrum. Meas. 2023, 72, 3271724. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image of Scenes | ndisp * | NLM | MECI | AB-NLM | |||
|---|---|---|---|---|---|---|---|
| DE | ALME | DE | ALME | DE | ALME | ||
| Art | 256 | 2.75 | 2.29 | 2.31 | 1.98 | 2.08 | 1.67 |
| Teddy | 256 | 2.68 | 2.61 | 2.54 | 2.35 | 2.41 | 2.28 |
| Moebius | 256 | 2.88 | 2.59 | 2.69 | 2.55 | 2.21 | 2.11 |
| Recycle | 260 | 3.04 | 2.81 | 2.75 | 2.58 | 2.19 | 1.78 |
| Jadeplant | 640 | 10.70 | 10.31 | 9.11 | 8.43 | 8.31 | 7.92 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, B.; Li, L.; Pan, H. Non-Local Means Hole Repair Algorithm Based on Adaptive Block. Appl. Sci. 2024, 14, 159. https://doi.org/10.3390/app14010159
Zhao B, Li L, Pan H. Non-Local Means Hole Repair Algorithm Based on Adaptive Block. Applied Sciences. 2024; 14(1):159. https://doi.org/10.3390/app14010159
Chicago/Turabian StyleZhao, Bohu, Lebao Li, and Haipeng Pan. 2024. "Non-Local Means Hole Repair Algorithm Based on Adaptive Block" Applied Sciences 14, no. 1: 159. https://doi.org/10.3390/app14010159
APA StyleZhao, B., Li, L., & Pan, H. (2024). Non-Local Means Hole Repair Algorithm Based on Adaptive Block. Applied Sciences, 14(1), 159. https://doi.org/10.3390/app14010159