



Nonlinear Tank-Level Control Using Dahlin Algorithm Design and PID Control



Abstract
1. Introduction
- The fuzzy logic and neural network approach is represented by the implementation of the fuzzy-PID controller to the liquid-level system using LabVIEW in [20], whereas four control strategies are designed and compared, including classical PID, gain scheduling (GS), internal model control (IMC), and fuzzy logic (FL) principle in [8]. Hybrid PI-neural network (hybrid PI-NN) controllers are presented in [21]. Parameters of PID in [22] were tuned by an artificially intelligent algorithm, such as a fuzzy, neural network, genetic algorithm, BAT algorithm, neuro-fuzzy, IT2FNNC. An example of the integrated fuzzy logic-based intelligent control of three tank systems is shown in [23];
- The use of optimization tourniquets, which include fractional order PI and PD controllers, is implemented in [24]. The performance characteristics of integer order and fractional order PID controller on the current integer order plant, which obtains a minimum objective function by Nelder–Mead optimization technique is studied in [25]. Comparison of the conventional PI controller with the fractional PI (FOPI) controller is described in [11]. Linear model predictive control can be efficiently used for coupled tank system liquid-level control [5]. Experimental evaluation of the adaptive three tank-level control is described in [26].
2. Materials and Methods
2.1. Mathematical Modeling
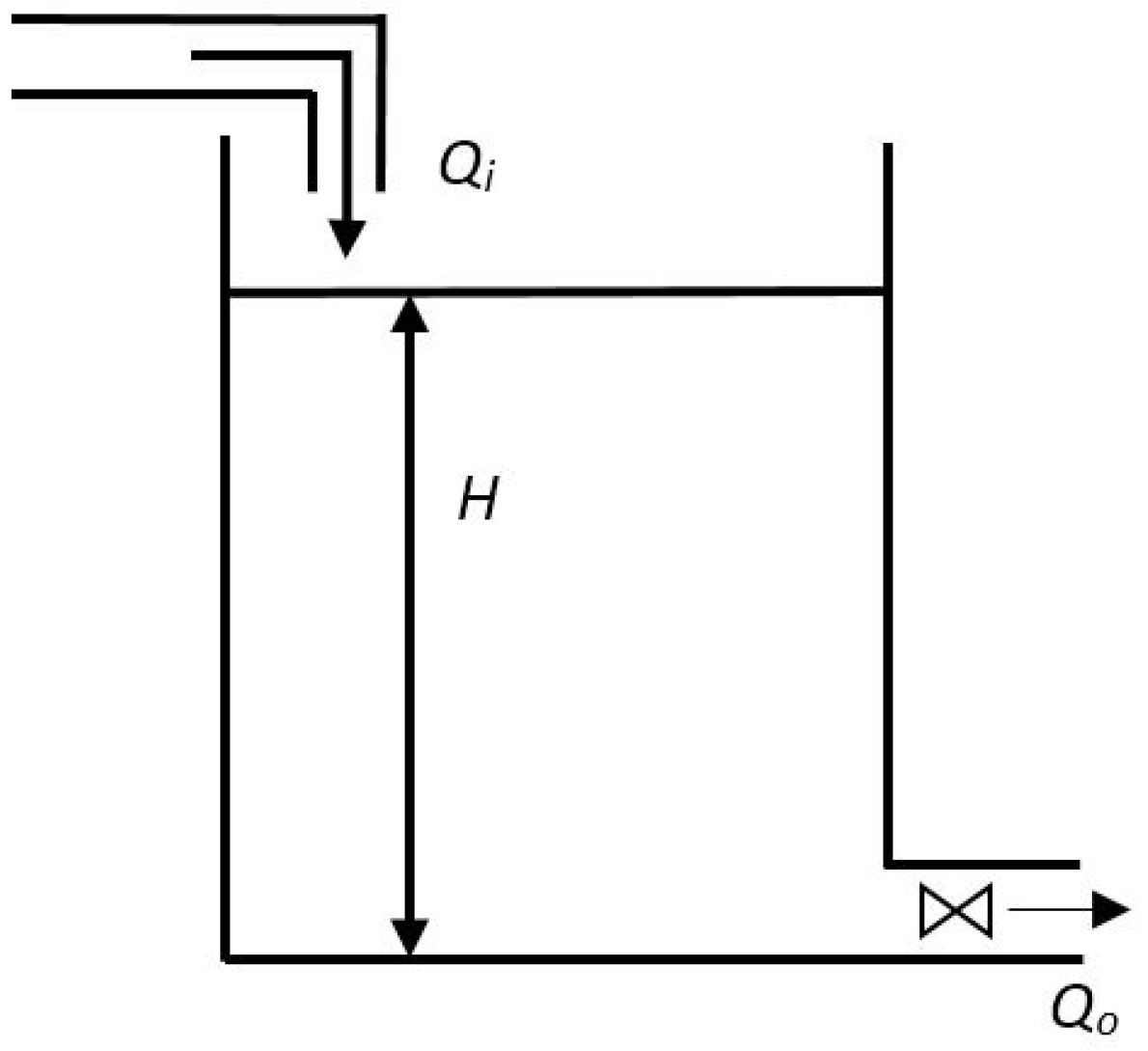
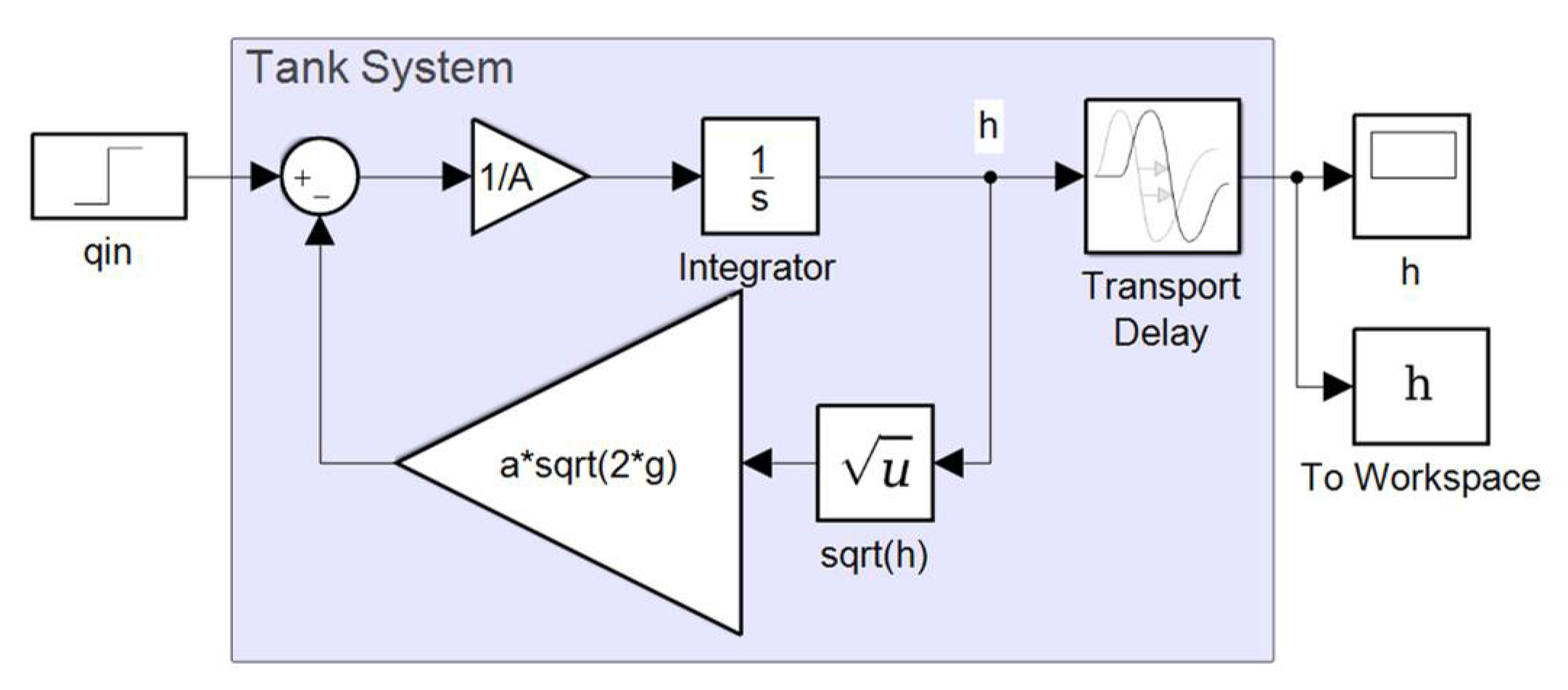
2.1.1. Single Tank Model
2.1.2. Coupled Tank Model
2.2. Model Linearization
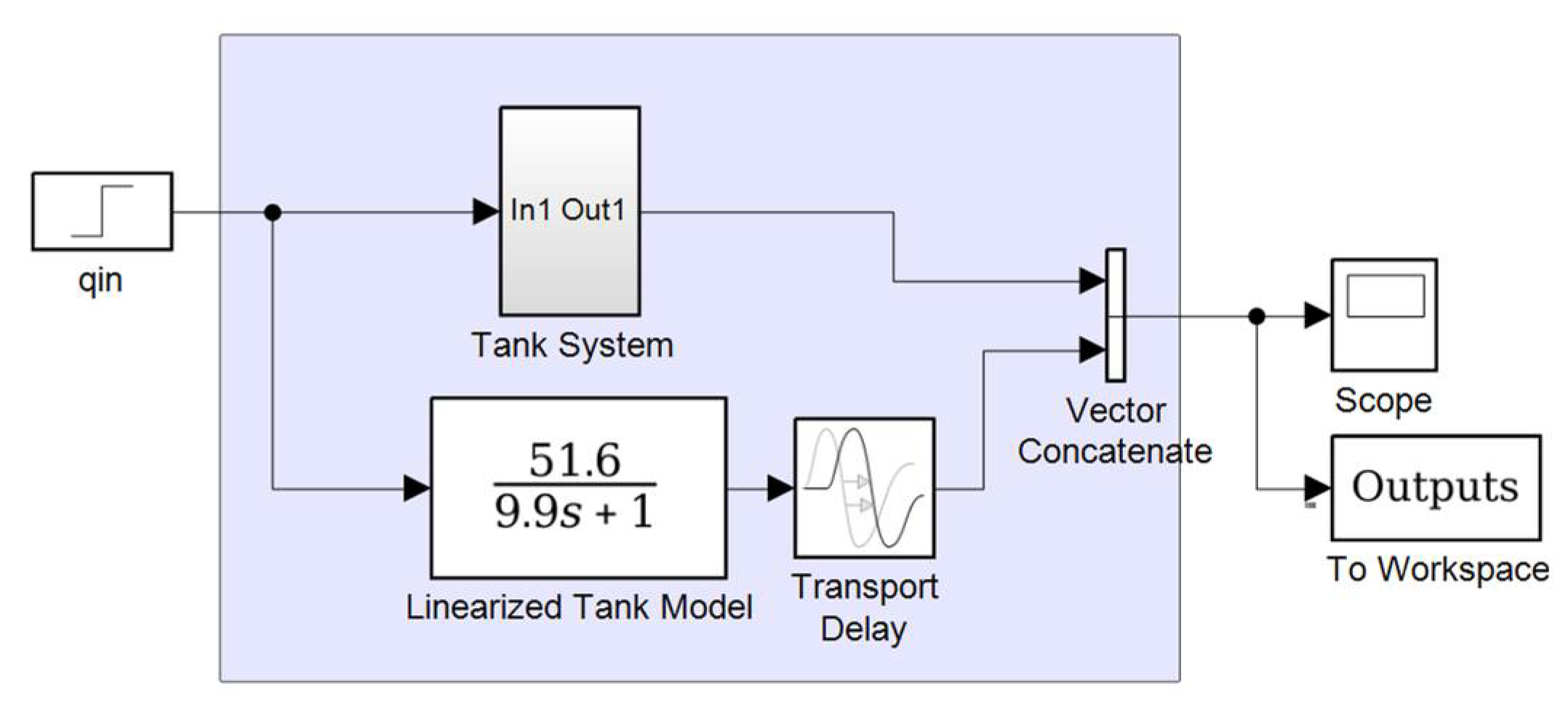
2.2.1. Single Tank Model Linearization
2.2.2. Coupled Tank Model Linearization
2.3. Controller Design
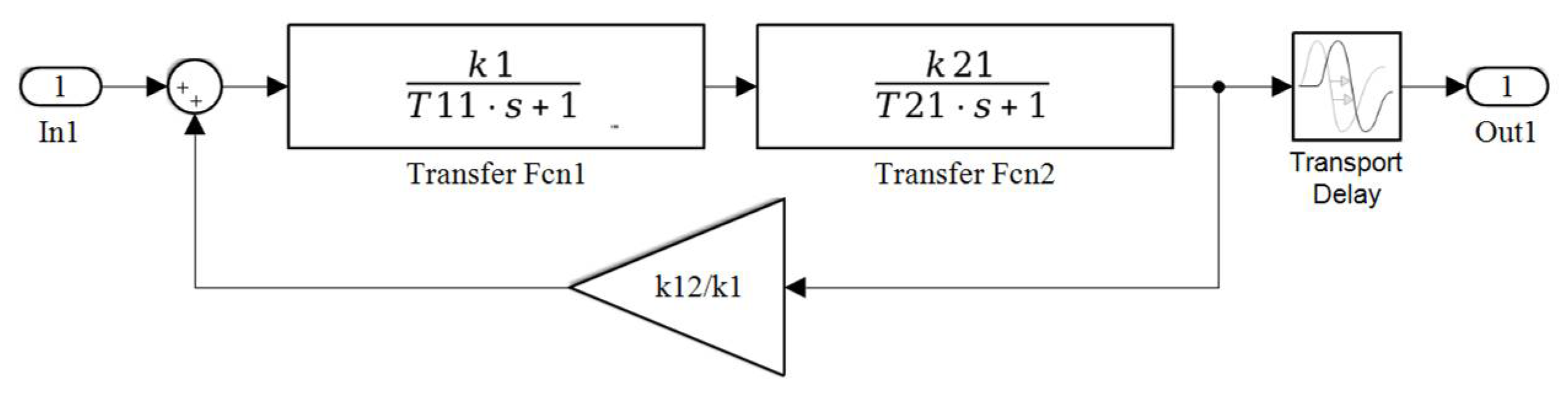
2.3.1. The Dahlin Controller Design
2.3.2. The Dahlin Controller for the Single Tank Model
2.3.3. The Dahlin Controller for the Coupled Tank Model
2.3.4. The PID Controller Design
3. Results
3.1. Single Tank Control Results
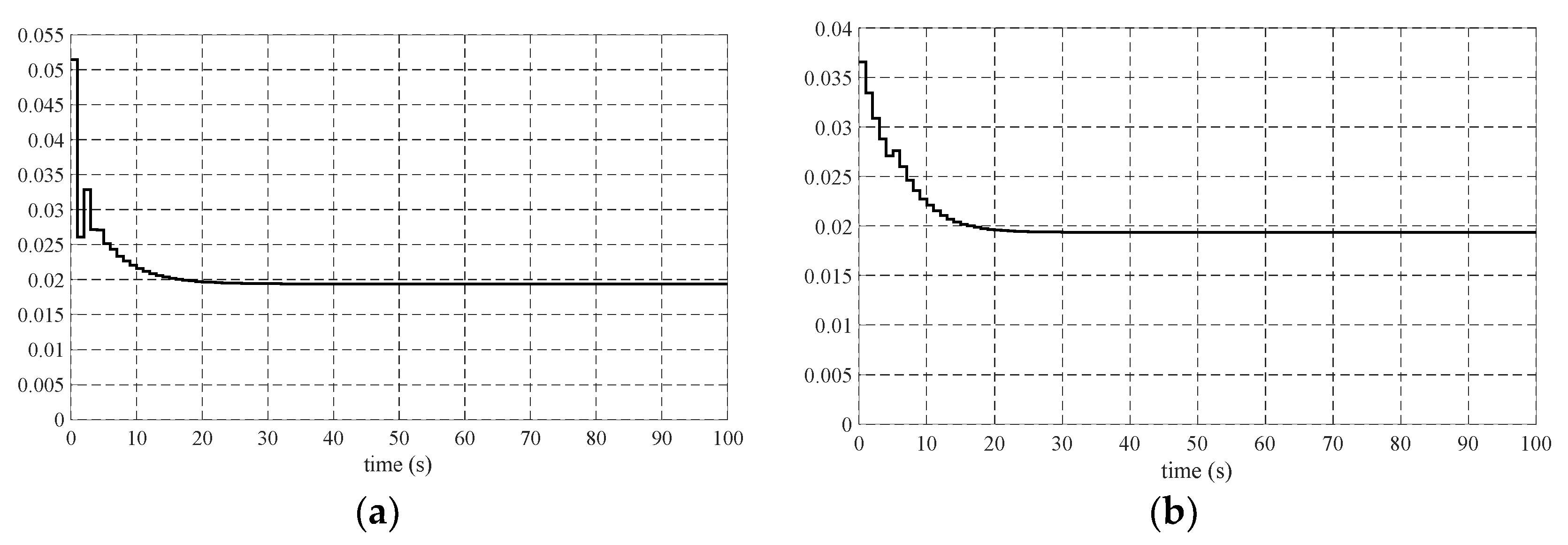
3.1.1. Single Tank Model Linearization
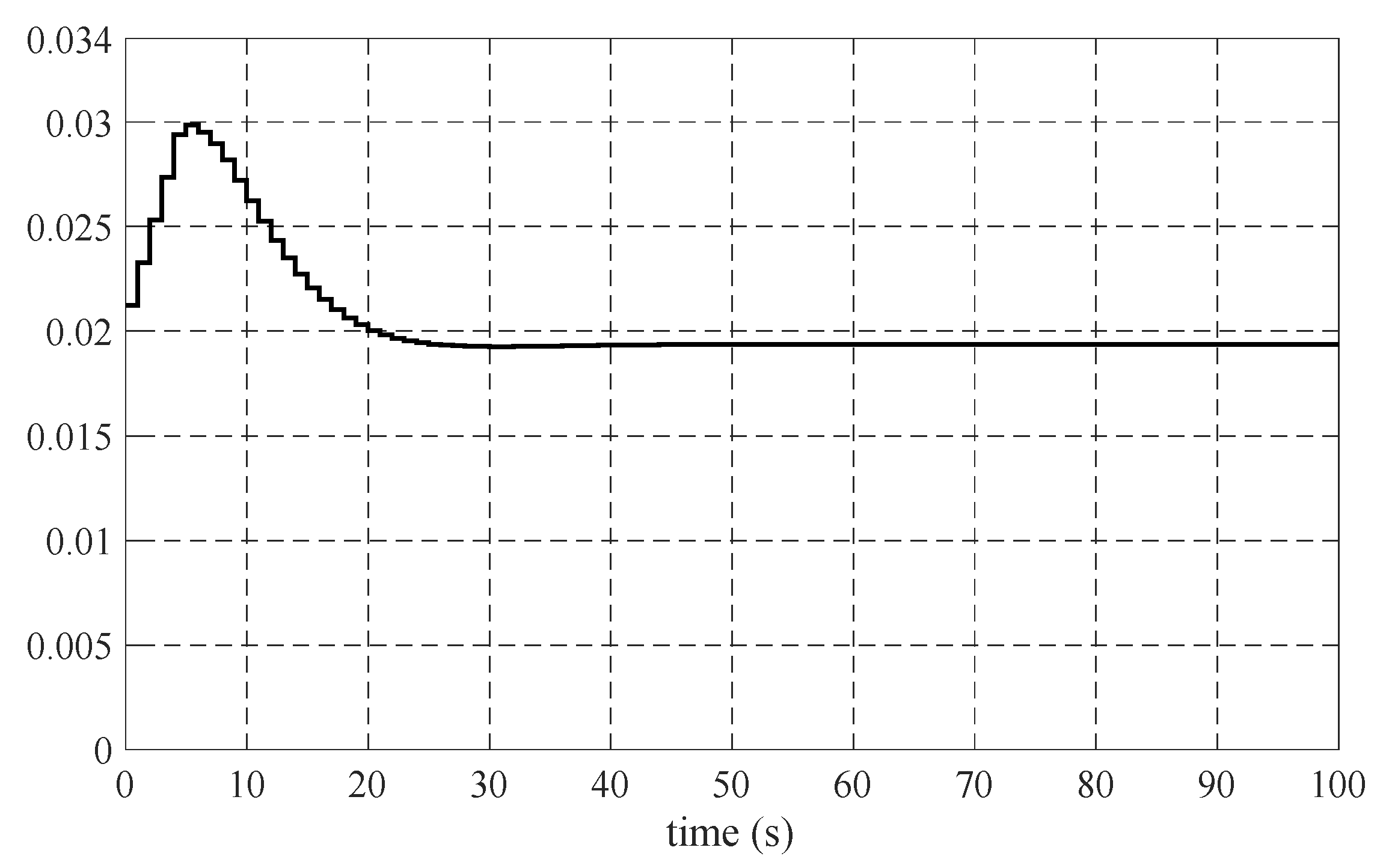
3.1.2. The Dahlin Algorithm Results
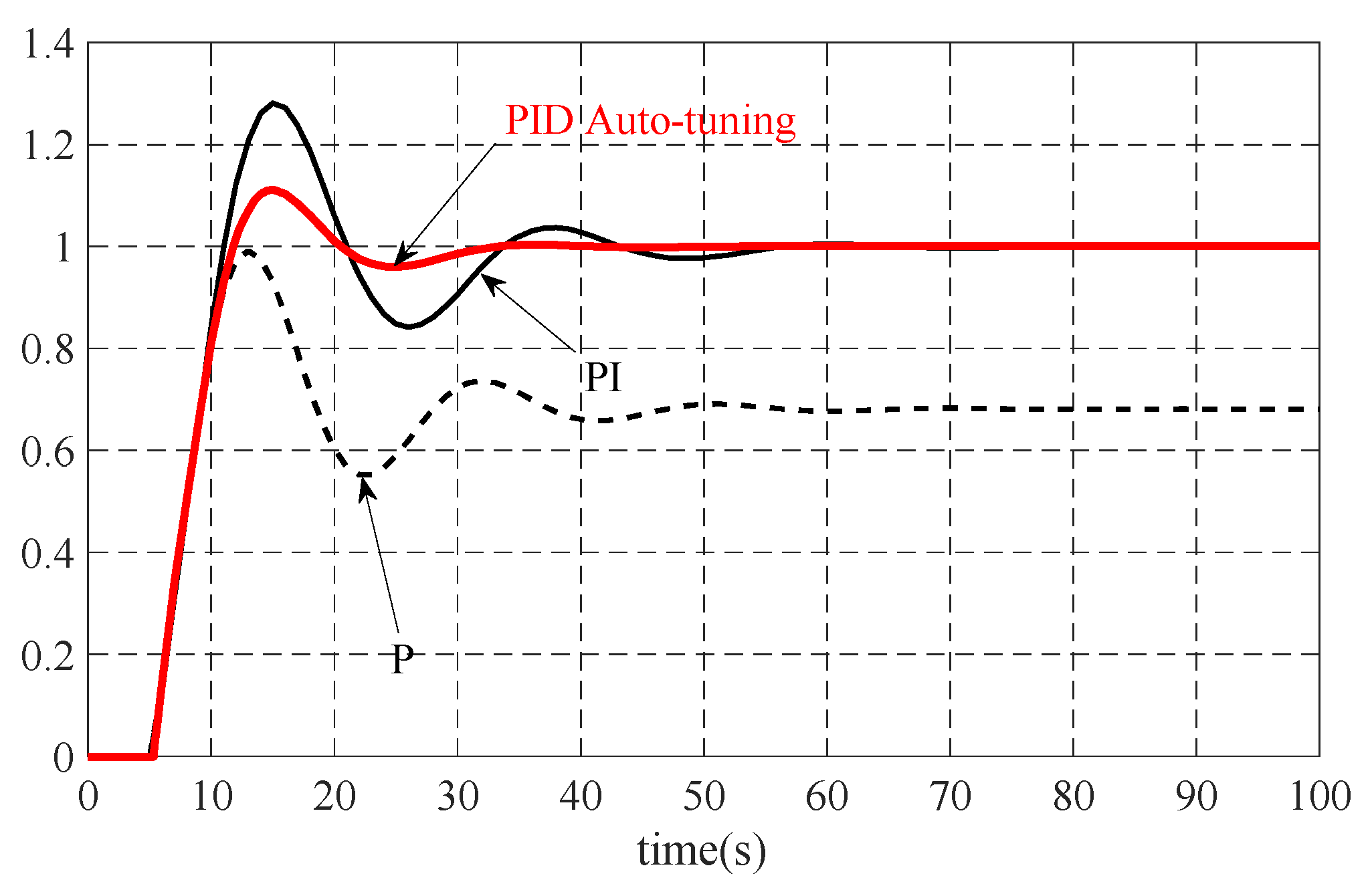
3.1.3. The PID Control Results
3.2. The Coupled Tank Control Results
3.2.1. The Coupled Tank Model Linearization
3.2.2. The Dahlin Algorithm
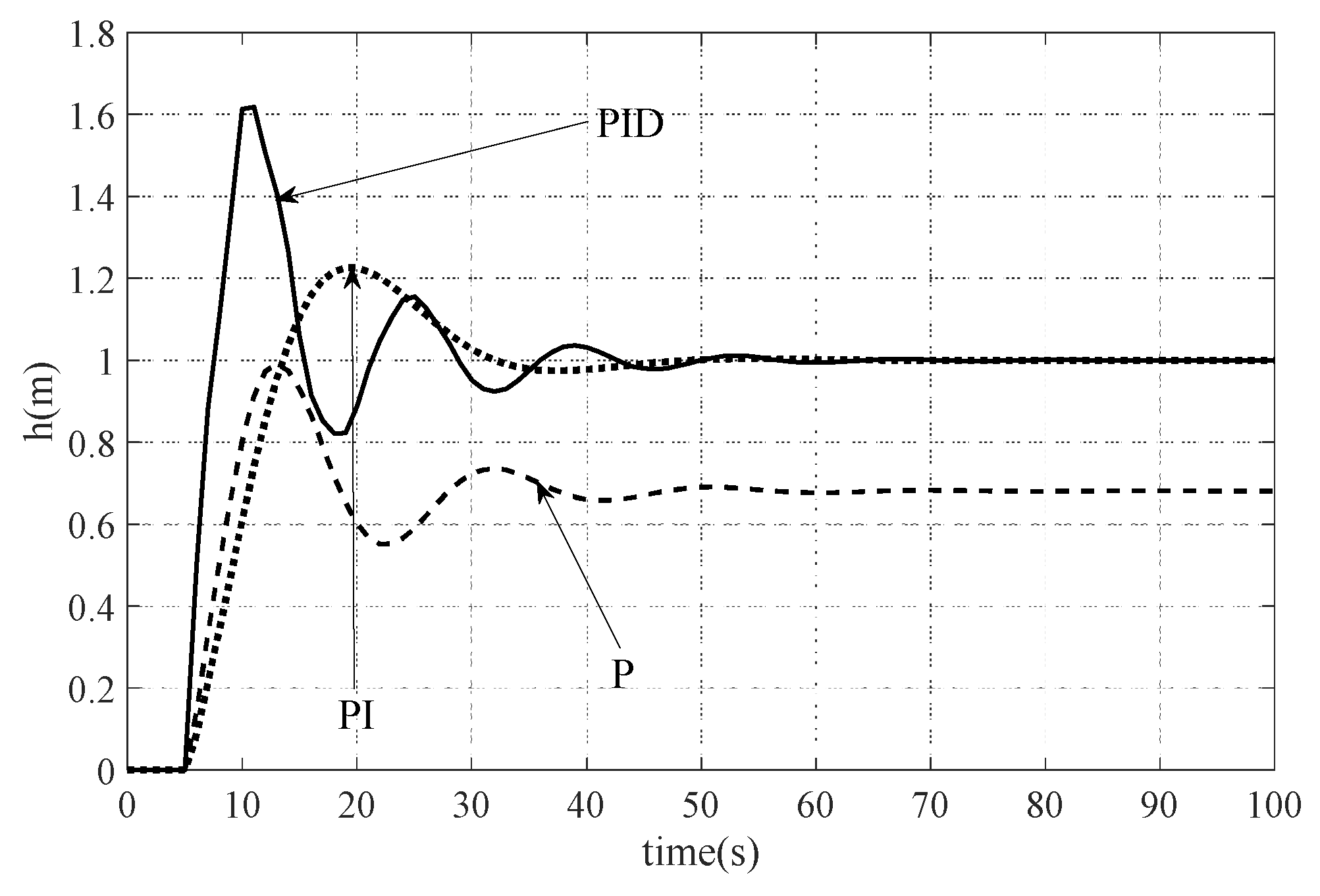
3.2.3. The PID Control Results
4. Discussion
4.1. The Transient Response Performances
4.2. The Comparison of the Performance Indexes
4.3. Robustness Analysis
4.4. Comparison with Results Provided in the Literature
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| A [m2] | Cross-sectional area of the tank; |
| Qi [m3/s] | Pump flow rate into the tank; |
| Qo [m3/s] | The flow rate of liquid out of the tank; |
| H [m] | Height of liquid in the tank; |
| a [m2] | Cross-sectional area of the tank output pipe; |
| g [m/s2] | Ground acceleration; |
| Qi1, Qi2 [m3/s] | The pump flow rates into tank 1 and tank 2; |
| Qo1, Qo2 [m3/s] | The flow rates of liquid out of tank 1 and tank 2; |
| Qo3 [m3/s] | The flow rate between tanks; |
| a1, a2 [m2] | The cross-sectional areas of tank 1 and tank 2 output pipes; |
| a3 [m2] | The cross-sectional area of the pipe between tanks; |
| A1, A2 [m2] | The cross-sectional areas of tank 1 and tank 2; |
| H1, H2 [m] | Heights of liquid in tank 1 and tank 2; |
| H1s, H2s [m] | Stationary values of the height of liquid in tank 1 and tank 2; |
| Qi1s, Qi2s [m3/s] | Stationary values of the pump flow rates into tank 1 and tank 2; |
| h1, h2 [m] | Height deviations from the stationary values; |
| qi1, qi2 [m3/s] | Pump flow rates into tank deviations from the stationary values; |
| 1/λ [s] | Desired time constant of the system with the Dahlin controller; |
| T [s] | Sampling time; |
| Td [s] | Desired transport delay of the ST system with Dahlin controller; |
| K | Single tank system gain factor; |
| Tl [s] | Single tank system time constant; |
| τ [s] | Transport delay of the single tank system; |
| T1, T2 [s] | Time constants of the coupled tank system; |
| Kpkr | The critical gain; |
| Tkr [s] | The critical oscillation period; |
| Mc | The maximum sensitivity; |
| Gp(s), Gc(s) | The plant and controller transfer functions. |
References
- Sabri, L.; Al-mshat, H. Implementation of Fuzzy and PID Controller to Water Level System Using LabView. Int. J. Comput. Appl. 2015, 116, 6–10. [Google Scholar] [CrossRef]
- Urrea, C.; Garcia-Garcia, Y. Design and Performance Analysis of Level Control Strategies in a Nonlinear Spherical Tank. Processes 2023, 11, 720. [Google Scholar] [CrossRef]
- Rajput, K.; Giri, V.K. Virtual Instrument Based Liquid Level Control System. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2015, 4, 5911–5916. [Google Scholar] [CrossRef]
- Getu, B.N. Water Level Controlling System Using Pid Controller. Int. J. Appl. Eng. Res. 2016, 11, 11223–11227. [Google Scholar]
- Khalid, M.U.; Kadri, M.B. Liquid Level Control of Nonlinear Coupled Tanks System Using Linear Model Predictive Control. In Proceedings of the 2012 International Conference on Emerging Technologies, Islamabad, Pakistan, 8–9 October 2012. [Google Scholar] [CrossRef]
- Tijjani, A.; Shehu, M.; Alsabari, A.; Sambo, Y.; Tanko, N. Performance Analysis for Coupled-Tank System Liquid Level Control Using MPC, PI and PI-plus-Feedforward Control Scheme. J. Robot. Autom. 2017, 1, 42–53. [Google Scholar] [CrossRef]
- Jaafar, H.I.; Hussien, S.Y.; Selamat, N.A.; Aras, M.; Rashid, M.Z. Development of PID Controller for Controlling Desired Level of Coupled Tank System. Int. J. Innov. Technol. Explor. Eng. 2014, 3, 32–36. [Google Scholar]
- Urrea, C.; Páez, F. Design and Comparison of Strategies for Level Control in a Nonlinear Tank. Processes 2021, 9, 735. [Google Scholar] [CrossRef]
- Krata, P.; Wawrzyński, W.; Więckiewicz, W.; Jachowski, J. Ship’s Ballast Tanks Size and Dimensions Review for the Purpose of Model Research into the Liquid Sloshing Phenomenon. Zesz. Nauk. Akad. Morska W Szczec. 2012, 29, 88–94. [Google Scholar]
- Zhao, Z.; Zhang, X.; Li, Z. Tank-Level Control of Liquefied Natural Gas Carrier Based on Gaussian Function Nonlinear Decoration. J. Mar. Sci. Eng. 2020, 8, 695. [Google Scholar] [CrossRef]
- Buljevic, A.; Miletic, M.; Mitrovic, A.; Kapetina, M.; Rapaic, M. Examples of Robust Controller Design. Serb. J. Electr. Eng. 2020, 17, 65–82. [Google Scholar] [CrossRef]
- Dlabač, T.; Ćalasan, M.; Krčum, M.; Marvučić, N. PSO-Based PID Controller Design for Ship Course-Keeping Autopilot. Brodogradnja 2019, 70, 1–15. [Google Scholar] [CrossRef]
- Bozic, M.; Antic, S.; Vujičić, V.; Bjekić, M.; Djordjevic, G. Electronic Gearing of Two DC Motor Shafts for Wheg Type Mobile Robot. FU Elec. Energ. 2018, 31, 75–87. [Google Scholar] [CrossRef]
- Vinod, J.; Sarkar, B.K. Francis turbine electrohydraulic inlet guide vane control by artificial neural network 2 degree-of-freedom PID controller with actuator fault. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2021, 235, 1494–1509. [Google Scholar] [CrossRef]
- Venkaiah, P.; Sarkar, B.K. Electrohydraulic Proportional Valve-Controlled Vane Type Semi-Rotary Actuated Wind Turbine Control by Feedforward Fractional-Order Feedback Controller. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2022, 236, 318–337. [Google Scholar] [CrossRef]
- Zhang, R.; Gao, L. The Brushless DC Motor Control System Based on Neural Network Fuzzy PID Control of Power Electronics Technology. Optik 2022, 271, 169879. [Google Scholar] [CrossRef]
- Han, J.; Shan, X.; Liu, H.; Xiao, J.; Huang, T. Fuzzy Gain Scheduling PID Control of a Hybrid Robot Based on Dynamic Characteristics. Mech. Mach. Theory 2023, 184, 105283. [Google Scholar] [CrossRef]
- Short, M.; Selvakumar, A.A. Non-Linear Tank Level Control for Industrial Applications. Appl. Math. 2020, 11, 876–889. [Google Scholar] [CrossRef]
- Imaduddin, M.; Kamil, M.A.N.; Putra, S.H.; Imawan, R.; Zahra, A.T.N.; Iskandar, R.F.; Fitriyanti, N. Implementation PID in Coupled Two Tank Liquid Level Control Using Ziegler–Nichols and Routh Locus Method. In Proceedings of the 2nd International Conference on Applied Science, Engineering and Social Sciences, Yogyakarta, Indonesia, 7–8 August 2019; SCITEPRESS—Science and Technology Publications: Yogyakarta, Indonesia, 2019; pp. 274–279. [Google Scholar]
- Prusty, S.B.; Pati, U.C.; Mahapatra, K. Implementation of Fuzzy-PID Controller to Liquid Level System Using LabVIEW. In Proceedings of the 2014 International Conference on Control, Instrumentation, Energy and Communication (CIEC), Calcutta, India, 31 January 2014; pp. 36–40. [Google Scholar] [CrossRef]
- Gouta, H.; Said, S.H.; Barhoumi, N.; M’Sahli, F. Observer-Based Backstepping Controller for a State-Coupled Two-Tank System. IETE J. Res. 2015, 61, 259–268. [Google Scholar] [CrossRef]
- Liang, L. The Application of Fuzzy PID Controller in Coupled-Tank Liquid-Level Control System. In Proceedings of the 2011 International Conference on Electronics, Communications and Control (ICECC), Ningbo, China, 9–11 September 2011; pp. 2894–2897. [Google Scholar] [CrossRef]
- Suresh, M.; Srinivasan, J.; Hemamalini, R. Integrated Fuzzy Logic Based Intelligent Control of Three Tank System. Serb. J. Electr. Eng. 2009, 6, 1–14. [Google Scholar] [CrossRef]
- Roy, P.; Kar, B.; Roy, B. Fractional Order PI-PD Control of Liquid Level in Coupled Two Tank System and its Experimental Validation: Cascaded FOPI-FOPD Control. Asian J. Control. 2017, 19, 1–11. [Google Scholar] [CrossRef]
- Mukherjee, D. PID Controller Design for an Interacting Tank Level Process with Time Delay Using MATLAB FOMCON Toolbox. In Proceedings of the 2nd International Conference on Control, Instrumentation, Energy & Communication (CIEC), Kolkata, India, 28–30 January 2016. [Google Scholar] [CrossRef]
- Cartes, D.; Wu, L. Experimental Evaluation of Adaptive Three-Tank Level Control. ISA Trans. 2005, 44, 283–293. [Google Scholar] [CrossRef] [PubMed]
- Clitan, I.; Abrudean, M.; Muresan, V. The Control of an Industrial Manipulator’s Positioning System Using Dahlin Algorithm. Procedia Technol. 2015, 19, 541–546. [Google Scholar] [CrossRef]
- Tian, X.; Peng, H.; Luo, X.; Nie, S.; Zhou, F.; Peng, X. Operating Range Scheduled Robust Dahlin Algorithm to Typical Industrial Process with Input Constraint. Int. J. Control. Autom. Syst. 2020, 18, 897–910. [Google Scholar] [CrossRef]
- Walz, S.; Lazar, R.; Buticchi, G.; Liserre, M. Dahlin-Based Fast and Robust Current Control of a PMSM in Case of Low Carrier Ratio. IEEE Access 2019, 7, 102199–102208. [Google Scholar] [CrossRef]
- Dahlin, E.B. Dahlin Designing and Tuning Digital Controllers. Instrum. Control. Syst. 1968, 41, 77–83. [Google Scholar]
- Zhang, Z.G.; Zou, B.G.; Bi, Z.F. Dahlin Algorithm Design and Simulation for Time-Delay System. In Proceedings of the 2009 Chinese Control and Decision Conference, Guilin, China, 17–19 June 2009; pp. 5819–5822. [Google Scholar] [CrossRef]
- Chiu, K. Digital Control of Complex Systems Based on Simple Models. Ph.D. Thesis, Louisiana State University and Agricultural & Mechanical College, Baton Rouge, LA, USA, 1971. [Google Scholar] [CrossRef]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ziegler–Nichols Method | ||
| KP | KI | KD |
| 0.5 KPkr | - | - |
| 0.45 KPkr | KP1.2/Tkr | - |
| 0.6 KPkr | KP 2/Tkr | KP 0.125 Tkr |
| Takahashi method | ||
| KP | KI | KD |
| 0.5 KPkr | - | - |
| 0.45 KPkr − 0.5 KI | 0.54 KPkrT/Tkr | - |
| 0.6 KPkr − 0.5 KI | 1.2 KPkrT/Tkr | 3/40 KPkrTkr/T |
| Symbol | Value | Unit |
|---|---|---|
| a | 0.0134 | m2 |
| A | 0.1257 | m2 |
| Parameters | Dahlin Algorithm |
|---|---|
| Rise time | 10.8 s |
| Overshoot | 0 |
| Setting time | 20 s |
| Steady-state error | 0 |
| Ziegler–Nichols Method | ||
| KP | KI | KD |
| 2.135 | - | - |
| 1.9215 | 0.1537 | - |
| 2.5620 | 0.3416 | 4.8038 |
| Takahashi tuning method | ||
| KP | KI | KD |
| 2.135 | - | - |
| 1.845 | 0.1537 | - |
| 2.3912 | 0.3416 | 4.8038 |
| Auto-tuning method | ||
| KP | KI | KD |
| 1.554 | 0.147 | 1.2445 |
| Controller | Rise Time | Overshoot | Setting Time | Steady-State Error | |
|---|---|---|---|---|---|
| Ziegler–Nichols method | P | 4.7 s | 45.58% | 38 s | 0.31 |
| PI | 5.65 s | 23.2% | 30.2 s | 0 | |
| Takahashi method | P | 4.8 s | 45.76% | 42 s | 0.32 |
| PI | 9.2 s | 23% | 38 s | 0 | |
| PID | 3.2 s | 61.8% | 46 s | 0 | |
| Auto-tuning method | PID | 4.87 s | 14.3% | 26.7 s | 0 |
| Symbol | Value | Unit |
|---|---|---|
| H1s | 2.5 | m |
| H2s | 1.5 | m |
| a1 | 58.088 × 10−4 | m2 |
| a2 | 63.6173 × 10−4 | m2 |
| a3 | 72.3823 × 10−4 | m2 |
| A1 | 2.0106 | m2 |
| A2 | 1.7908 | m2 |
| Parameters | Dahlin Algorithm |
|---|---|
| Rise time | 21 s |
| Overshoot | 0 |
| Setting time | 41 s |
| Steady-state error | 0 |
| Ziegler–Nichols Method | |||
| KP | KI | KD | |
| 121 | 0 | 0 | |
| 108.9 | 3.4389 | 0 | |
| 145.2 | 7.6421 | 689.7 | |
| Takahashi tuning method | |||
| KP | KI | KD | |
| 121 | 0 | 0 | |
| 107.1805 | 3.4389 | ||
| 141.3789 | 7.6421 | 689.7 | |
| Auto-tuning method | |||
| KP | KI | KD | |
| C | 110.452 | 1.479 | 1896.5737 |
| D | 35.2523 | 0.30011 | 804.0765 |
| Controller | Rise Time | Overshoot | Setting Time | Steady-State Error | ||
|---|---|---|---|---|---|---|
| Ziegler–Nichols method | P | 9.34 s | 83.2% | 567 s | 0 | |
| PID | 7.27 s | 66.5% | 233 s | 0 | ||
| Takahashi method | P | 9 s | 91.3% | 1140 s | 0 | |
| PID | 8 s | 71.7% | 347 s | 0 | ||
| Auto-tuning method | PID | C | 5.78 s | 9.69% | 59.1 s | 0 |
| D | 16 s | 8.7% | 107 s | 0 | ||
| Parameters | D | MD | D PI | PI ZN | PI T | PID AT |
|---|---|---|---|---|---|---|
| Rise time | 10.8 s | 10.8 s | 11 s | 5.65 s | 9.2 s | 4.87 s |
| Overshoot | 0 | 0 | 3.8% | 23.2% | 23% | 14.3% |
| Setting time | 20 s | 20 s | 29 | 30.2 s | 38 s | 26.7 s |
| Steady-state error | 0 | 0 | 0 | 0 | 0 | 0 |
| Parameters | D | MD | D PID | PID ZN | PID T | PID AT |
|---|---|---|---|---|---|---|
| Rise time | 21 s | 21 s | 21 s | 7.27 s | 14.6 s | 5.78 s |
| Overshoot | 0 | 0 | 0 | 66.5% | 16% | 9.69% |
| Setting time | 41 s | 41 s | 41 s | 233 s | 82.4 s | 59.1 s |
| Steady-state error | 0 | 0 | 0 | 0 | 0 | 0 |
| Controller | IE | IAE | ISE | ITAE | ITASE | |
|---|---|---|---|---|---|---|
| Ziegler–Nichols method | P | 321.5 | 321.5 | 106.5 | 1595 × 105 | 1595 × 105 |
| PI | 6.505 | 10.57 | 6.693 | 116.9 | 40.63 | |
| PID | 2927 | 6.58 × 1014 | 2.517 × 1028 | 1.011 × 1016 | 1.956 × 1015 | |
| Takahashi method | P | 321.5 | 321.5 | 106.5 | 1595 × 105 | 1595 × 105 |
| PI | 6.606 | 10.7 | 6.726 | 119.2 | 30.75 | |
| PID | 2.425 | 10.21 | 6.44 | 111 | −11.56 | |
| Auto-tuning method | PID | 6.084 | 8.022 | 6.119 | 52.31 | 32.75 |
| Controller | IE | IAE | ISE | ITAE | ITASE | |
|---|---|---|---|---|---|---|
| Dahlin | 1/λ = 5 s | 8.366 | 9.639 | 6.55 | 395.1 | −272.1 |
| Modified Dahlin | 1/λ = 5 s | 9.465 | 9.465 | 6.77 | 273 | 273 |
| Dahlin | 1/λ = 4 s | 7.462 | 8.519 | 6.059 | 320.1 | −225.5 |
| Modified Dahlin | 1/λ = 4 s | 8.004 | 8.02 | 6.286 | 37.62 | 37.09 |
| Controller | IE | IAE | ISE | ITAE | ITASE | ||
|---|---|---|---|---|---|---|---|
| Ziegler–Nichols method | P | 10.15 | 96.27 | 37.7 | 1.548 × 104 | 4026 | |
| PID | 0.1309 | 38.07 | 14.62 | 2370 | −29.02 | ||
| Takahashi method | P | 9.583 | 180.9 | 73.57 | 4.709 × 104 | 3948 | |
| PID | −0.3729 | 49.45 | 19.96 | 3765 | −29.73 | ||
| Auto-tuning method | C | PID | 0.6761 | 7.228 | 2.944 | 140.1 | −111.9 |
| D | PID | 2.829 | 14.04 | 5.83 | 520.5 | −405.8 | |
| Controller | IE | IAE | ISE | ITAE | ITASE | |
|---|---|---|---|---|---|---|
| Dahlin | 1/λ = 10 s | 11.38 | 11.38 | 6.046 | 305.7 | 305.7 |
| Modified Dahlin | 1/λ = 10 s | 10.96 | 11.06 | 6.364 | 116.1 | 89.88 |
| Dahlin | 1/λ = 4 s | 5.07 | 5.178 | 3.081 | 30.42 | 16.02 |
| Modified Dahlin | 1/λ = 4 s | 5.008 | 5.077 | 3.501 | 23.38 | 10.45 |
| Parameters | Trial and Error [7] | Auto-Tuning [7] | Ziegler–Nichols [7] | Cohen–Coon [7] | Modified Dahlin 1/λ = 4 s |
|---|---|---|---|---|---|
| Rise time | 24 s | 9.14 s | 3.29 s | 2.81 s | 5 s |
| Overshoot | 6.86% | 1.81% | 38.5% | 33.7% | 0% |
| Setting time | 84.4 s | 53.3 s | 32.1 s | 23.59 s | 7 s |
| Steady-state error | 0 | 0 | 0 | 0 | 0 |
| Methods | Trial and Error | Auto− Tuning | Ziegler– Nichols | Cohen– Coon | Modified Dahlin 1/λ = 4 s |
|---|---|---|---|---|---|
| IE | 14.24 | 9.246 | 0.4068 | 0.4198 | 5.009 |
| IAE | 16.95 | 9.272 | 6.036 | 4.28 | 5.009 |
| ISE | 10.21 | 4.783 | 2.371 | 1/836 | 2.787 |
| ITAE | 259.5 | 188.4 | 58.77 | 26.58 | 22.46 |
| ITASE | 81.45 | 188.4 | −7.552 | −6.886 | 22.46 |
| Methods | Ziegler– Nichols | Ciancone Correlation | Pole Placement | Modified Dahlin 1/λ = 4 s |
|---|---|---|---|---|
| IE | 0.4115 | 1.027 | 0.4274 | 5.017 |
| IAE | 32.87 | 78.39 | 153.6 | 5.017 |
| ISE | 13.69 | 31.27 | 60.7 | 2.789 |
| ITAE | 1597 | 9507 | 3.538 × 104 | 22.69 |
| ITASE | −27.94 | −71.95 | 38.93 | 22.69 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dlabač, T.; Antić, S.; Ćalasan, M.; Milovanović, A.; Marvučić, N. Nonlinear Tank-Level Control Using Dahlin Algorithm Design and PID Control. Appl. Sci. 2023, 13, 5414. https://doi.org/10.3390/app13095414
Dlabač T, Antić S, Ćalasan M, Milovanović A, Marvučić N. Nonlinear Tank-Level Control Using Dahlin Algorithm Design and PID Control. Applied Sciences. 2023; 13(9):5414. https://doi.org/10.3390/app13095414
Chicago/Turabian StyleDlabač, Tatijana, Sanja Antić, Martin Ćalasan, Alenka Milovanović, and Nikola Marvučić. 2023. "Nonlinear Tank-Level Control Using Dahlin Algorithm Design and PID Control" Applied Sciences 13, no. 9: 5414. https://doi.org/10.3390/app13095414
APA StyleDlabač, T., Antić, S., Ćalasan, M., Milovanović, A., & Marvučić, N. (2023). Nonlinear Tank-Level Control Using Dahlin Algorithm Design and PID Control. Applied Sciences, 13(9), 5414. https://doi.org/10.3390/app13095414