Abstract
Walking is a fundamental movement in daily life; however, many factors affect walking that may reduce the mobility of the people. Walking assistance devices can help with gaining mobility back for people who suffer from walking problems. In the present study, a computational method to determine the location and stiffness of the assistive walking systems was developed. The human walking model was created by using nine rigid bodies and eight revolute joints connecting them in the sagittal plane. The walking assistance system was considered as a tension spring with both ends attached to the human walking model. A coordinate system was defined along the distal–proximal direction of the human body. The position of the walking assistance system was determined by using four design variables, and the optimal position of the assistive walking system to reduce the total positive joint energy was found around the hip joint at a walking speed of 1.3 m/s. Hip joint moment and power were significantly affected by the walking assistance system, and the total positive joint energy was reduced by 8.8%. Because walking speed significantly affects walking kinematics and kinetics, the effect of walking speed on the optimal walking assistance device was investigated. The position of the device was kept the same, and the optimal stiffness and free length of the spring were found at different walking speeds. Two different cases were considered: a speed-specific design in which stiffness characteristics were separately optimized for each speed and a general design in which stiffness characteristics were optimized by considering all walking speeds. It was found that, in both cases, hip joint moment and power significantly reduced, and the speed-specific design produced a slightly larger reduction in total joint energy. The performance of the walking assistance systems in both cases were found to be higher at faster walking speeds.
1. Introduction
Walking is the method of locomotion used by humans to move from one location to another. Aging [1], overweight [2], disease [3], etc., can cause a reduction in mobility. Those with reductions in mobility require assistance to conduct daily life routines, and these reductions create barriers to socialization, among others. Walking assistance systems are one of the ways to regain mobility as they decrease the requirements for joint moments and power.
Recently, there has been a tremendous amount of effort devoted to developing assistive systems to reduce the metabolic cost of walking [4,5,6,7,8,9,10,11,12], to facilitate the carrying of objects [13,14], etc. There are active [4,5,6] and passive [7,8,9,10,11,12] walking assistance systems that are classified depending on the requirements for external power. Whereas passive devices store and release energy using elastic elements, active devices use electric motors, hydraulic, pneumatics systems, etc., to generate forces and moments. Although active systems reduce the metabolic cost of walking more than passive systems, passive walking assistance systems are advantageous due to being light and easy to use compared with active systems.
Reducing the metabolic cost of walking is one of the important goals of walking assistance systems [15]. Previous studies showed that elderly people reduce their walking speed to reduce the metabolic cost of walking [16]. Instead of reducing walking speed, a walking assistance system can help to reduce the cost of walking while maintaining the walking speed. An active ankle exoskeleton reduced the metabolic cost of walking by 24% via the optimization of the assistive torque profile of the device [4]. Collins et al. developed a passive ankle exoskeleton that reduced the metabolic cost of walking by 7.2% and showed that the passive walking assistance system could reduce the metabolic cost of walking [7]. The spring system around ankle joint stores and releases energy with a clutch system depending on the motion. In another study by Nuckols and Sawicki [10], the effect of walking speed on the optimal stiffness characteristics of an ankle joint assistance system was investigated. Panizzolo et al. showed that an elastic band that was placed around hip joint reduced the metabolic cost of walking by 4.2% [8]. Cheng et al. proposed an exotendon that reduced the load on hamstring muscles [11].
Many different designs and methods have been used to investigate walking assistance devices for various purposes, as shown in Table 1. Most of the previous studies have investigated the performance of walking assistance systems through experiments [4,5,7,8,10,11,17,18,19]. There are some limitations to and disadvantages of these experimental investigations. The locations that the walking assistance devices have been placed are mostly the same, and the stiffness of the structures were changed [7,10,11]. In addition, several procedures have been used to conduct experiments, and these experiments take a significant amount of time. Therefore, computational studies are promising, and the result of experimental studies can be used to validate the findings of simulations.

Table 1.
The comparison of previous studies based on the type of assistance, the type of study (experimental (Exp.) or computational (Comp.)), the joint assisted, and the purpose.
Moreover, the placement of the various types of walking assistance systems have been limited to certain locations [4,5,7,8,10,11,17,18,19,20]. The locations of walking assistance systems have been determined based on joint kinematics, joint kinetics, and experience. The number of design alternatives can be increased by using simulation-based investigation. Dembia et al. [20] conducted a simulation-based investigation for seven different locations. However, the location where the walking assistance systems are used can be determined through the optimization using simulation model. In the present study, an optimization-based method to determine the location of walking assistance system use was presented, and many design alternatives were considered during the optimization.
The purposes of walking assistance systems are mostly to reduce the energetic cost of walking [4,5,7,8,10,11,19,20]. The purpose of assistive systems can be extended to rehabilitation, falling prevention, etc., by using different objective functions in the simulation model. Thus, the aim of the proposed method was to find the location and stiffness of walking assistance system to create a framework for future studies.
In the present study, a two-dimensional multibody dynamic model of human walking with a walking assistance system was created. The walking assistance system was considered as a tension spring, and the two ends of the spring were found by minimizing the total positive joint power. Although previous studies developed walking assistance systems around the ankle, knee, and hip joints to reduce the metabolic cost of walking, the locations of the walking assistance system placement were empirically chosen. The present study proposes a way to determine the location of the walking assistance system based on the optimization. After determining the location of the walking assistance system placement, the optimal stiffness values at different walking speeds were found. Additionally, an optimal stiffness value that considers all walking speeds were also obtained. The contributions of the walking assistance system with a speed-specific stiffness and a general stiffness for all speeds were compared in terms of the reduction in the total positive joint power, joint moments, stiffness characteristics, etc.
2. Methods
A multibody dynamics simulation of human walking with a walking assistance system was conducted. A spring-like system that can carry tension forces only was considered as a structural element of the walking assistance device. Optimization problems were defined to determine the placement and structural properties of the walking assistance systems. The workflow of the method is given in Figure 1.

Figure 1.
The workflow of the method.
2.1. Computational Model of Human Walking with Passive Assistive System
In our previous study [21], a two-dimensional (2D) multibody dynamic model of human walking was created by using nine rigid bodies (2 feet, 2 shanks, 2 thighs, pelvis, trunk, and head) and eight revolute joints (2 ankles, 2 knees, 2 hips, pelvis-trunk, and neck joints). Because most of the power during walking is consumed in the sagittal plane, a 2D modeling approach was adopted. The multibody system had 8 degrees of freedom to define the intersegmental position by using joints and 3 degrees of freedom to determine the spatial coordination with respect to the global coordinate system. Ground reaction forces were predicted with a foot–ground contact model. The normal ground reaction force, , was obtained using the relationship given in Equation (1), where is the contact stiffness, is the amount of penetration, is the stiffness exponent, and is the contact damping at a specified penetration level. The tangential behavior of contact was modeled with Coulomb friction. The height and weight of the human model were determined as 170 cm and 70 kg, respectively. The masses and inertial properties of each rigid limb were estimated by using anthropometric distributions.
Inverse dynamic analyses were conducted to find the joint moments. The input of the inverse dynamic analyses were joint motions, which were assumed to be periodic and perfectly symmetric between the legs. In this study, joint motions were generated by minimizing the total positive joint power on the basis of our previous study [21], as shown in Figure 2. The conditions of periodicity and perfect symmetry between legs were satisfied by applying joint angles to one leg with a phase shift by 50% of gait cycle with respect to the other leg.
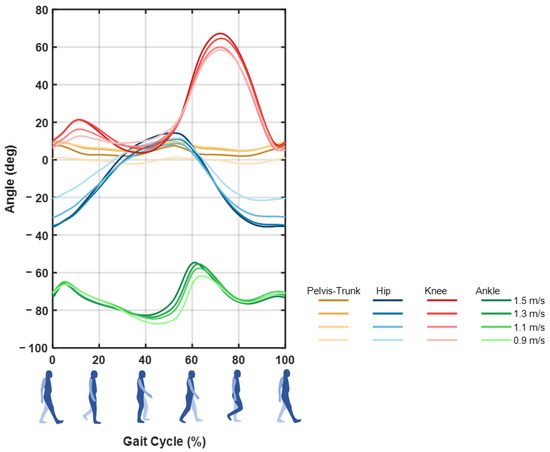
Figure 2.
Ankle, knee, hip, and pelvis-trunk joint angles at walking speeds of 0.9, 1.1, 1.3. and 1.5 m/s.
The two ends of the spring, which behaved as a walking assistance system by storing and releasing energy under tension forces, were attached to points on rigid bodies. The connection between the spring model and the corresponding rigid body was assumed to be rigid connection, and the effect of soft tissue on the position of the springs was neglected.
2.2. Optimal Location and Stiffness of Passive Walking Assistance System
The design parameters of the passive walking assistance system were the stiffness, free length, and location of the spring. The tension spring that was used in the device generated forces depending on the stiffness when the length of the spring exceeded the free length of the spring. The placement of the walking assistance system was determined by using the position of both ends of the spring, (x1, y1) and (x2, y2). The positions (x1, y1) and (x2, y2) were defined on the u–v coordinate system, which was aligned to the distal-proximal direction of the human body. The definition of the position of the spring on the human body is shown in Figure 3. The u-axis describes the location on the distal–proximal direction. The value of u was between 0 and 1. A value of u between 0 and 0.2 described the location on the foot from toe to heel. Similarly, the ranges of 0.2–0.4, 0.4–0.6, 0.6–0.8, and 0.8–1 determined the positions on the shank, thigh, pelvis, and trunk, respectively. The v-axis was perpendicular to the u-axis, and the range of the v-axis was defined as ± 5 cm.
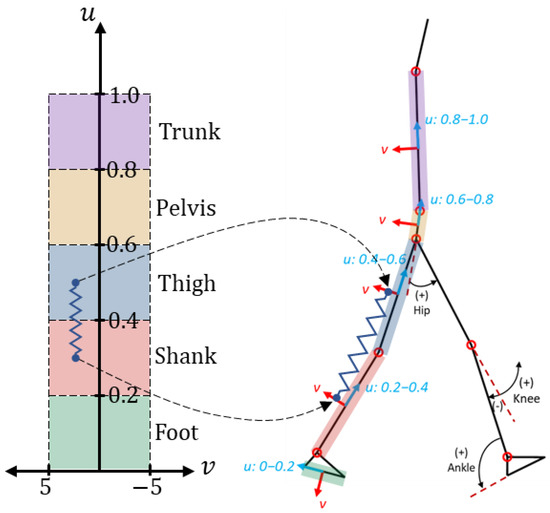
Figure 3.
The definition of u–v coordinate system to determine the position of passive walking assistance device.
In the present study, the reduction in energy cost was the main aim of the walking assistance system. The power of the ith joint, Pi(t), was calculated by the multiplication of the moment, τi(t), and angular velocity of the ith joint. The positive energy of the ith joint was obtained by the integral of the positive power with respect to time, t, and it was divided into the duration of the gait cycle, T. The objective function is the summation of the positive energy of all joints as given in Equation (2), where njoints is the total number of joints.
The generated assistive moments around the joints depend on the moment arm and the generated force on the spring. A proportional increase in force and a decrease in moment arm, or vice versa, result in equivalent results in terms of the assistive moment. Therefore, the optimization of the position and stiffness was conducted in two steps. First, the optimal positions of the walking assistance system were found. Then, the optimal stiffness depending on the walking speed was investigated.
3. Results
The optimal location and structural characteristics of the walking assistance system were found by minimizing the total positive energy of the joints. After obtaining the optimal location of the spring, the optimal stiffness and free length of the spring were found at different walking speeds.
3.1. Optimal Location of the Passive Walking Assistance
An optimization problem to find the placement of spring system to reduce total positive energy is given in Equation (3). The stiffness of the spring was kept constant during the first step. In addition to the placement of the spring, a design variable, , was used to define the free length, , as shown in Equation (4). The distance between the two points of the spring at the initial contact () was denoted as . Thus, the free length of the spring was determined within the interval of 90–110% of by the design variable, . The position of the walking assistance device was defined by using , , , and as shown in Figure 3. Then, the optimization problem was implemented in MATLAB® (The Mathworks, Natick, MA, USA) and solved by using the “Optimization Toolbox”.
The optimal placement of the walking assistance system for a given stiffness was found around the hip joint. The effect of the walking assistance system on hip joint moment and power is given in Figure 4. The total positive joint energy was reduced by 8.8% when the walking assistance device was applied to both legs. The second positive power region of the hip joint (55–70% of gait cycle) diminished to almost zero. The negative power region of the hip joint (20–55% of the gait cycle) increased and became almost zero as well. The negative joint moment around 20–70% of the gait cycle almost vanished. In addition to the hip joint, the average moment and total positive power of the pelvis-trunk joint were also reduced. However, the joint moment and the power of knee and ankle joints were not significantly affected.
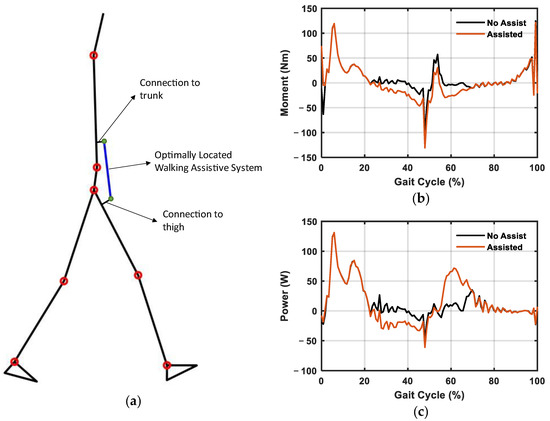
Figure 4.
(a) Optimal position of the walking assistance system for a given stiffness. The effect of the walking assistance system on (b) hip joint moment and (c) hip joint power.
3.2. Optimal Stiffness of Passive Walking Systems at Different Walking Speeds
Walking speed affects joint angles and moments. Therefore, it was expected that walking speed would affect the optimal parameters of the walking assistance system. For this purpose, the stiffness and free length of the spring system were optimized at walking speeds of 0.9, 1.1, 1.3, and 1.5 m/s. In addition to the optimal systems designed specific for a certain walking speed, the stiffness and free length were optimized by considering all walking speeds as given in Equation (5). fv is the value of the objective function for the walking speed v.
The optimal stiffness and free length of the assistive system were found for each walking speed and single design that considered all walking speeds. Hip joint moments and powers with/without walking assistance systems are shown in Figure 5. The optimal parameters specific to a certain walking speed reduced the joint power more than the optimal parameters that considered all walking speeds.
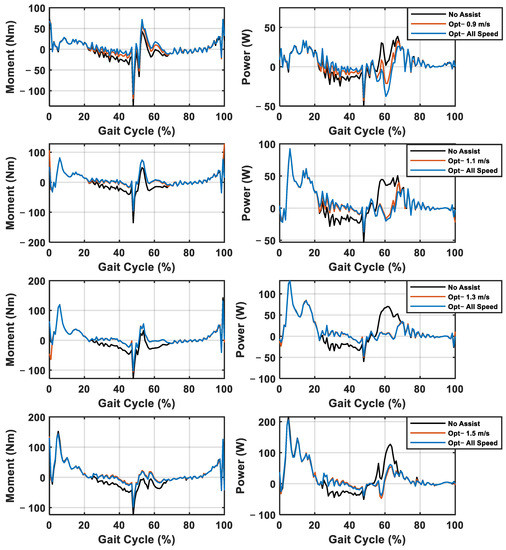
Figure 5.
The effect of walking assistance devices on hip joint moment and power at different walking speeds.
The main objective of the device was to reduce positive joint energy. The total positive joint energy at different walking speeds for the speed-specific design and general-design cases was calculated by using Equation (3), and the results are shown in Figure 6. The objective function value that considered the total positive power of all joints increased when walking speed increased. The maximum reduction of power was achieved at 1.3 m/s, followed by at 1.1, 1.5, and 0.9 m/s. According to Figure 5 and Figure 6, the speed-specific design had a performance similar to that of the optimal design that considered all speeds at walking speeds of 1.1, 1.3, and 1.5 m/s. However, the difference from the performance of the optimal design was larger at a walking speed of 0.9 m/s.
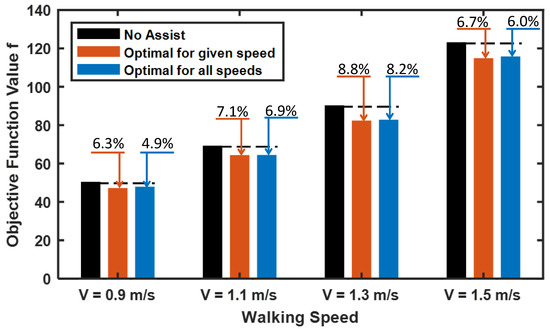
Figure 6.
The effect of walking assistance devices on total positive joint energy at different walking speeds.
The force–displacement characteristics of the speed-specific designs and general design are shown in Figure 7. The optimal stiffness was found to be higher at higher walking speeds. The free length of the spring system was almost the same for all walking speeds. Compared with the optimal force–displacement characteristics of the speed-specific designs, the general design had similar characteristics to the speed-specific design at walking speeds of 1.1 and 1.3 m/s.
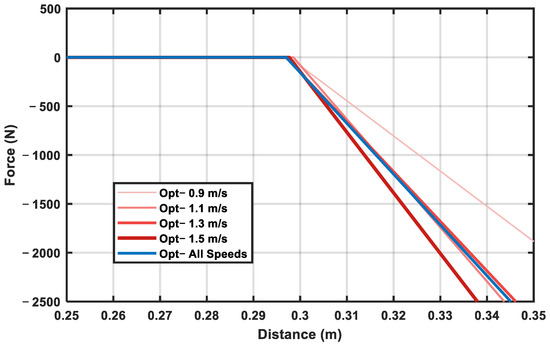
Figure 7.
Force–displacement characteristics of speed-specific optimal walking assistance system and walking assistance system that considers different walking speeds.
4. Discussion
In the present study, an optimization study of walking assistance systems was conducted through simulation, unlike the previous studies that investigated the effect of walking assistance systems using experiments. The stiffness and placement of the walking assistance system were optimized by using a 2D multibody dynamics model of human walking. The optimal placement of the walking assistance system was found by proposing a design space that was aligned to the distal–proximal direction of the human body. The definition of such a design space enabled the determination of the location of the system and the corresponding rigid bodies on which it could be implemented. Then, the stiffness and free length of the spring were optimized at different walking speeds.
Assisting around the hip joint was found to be the optimal placement to reduce positive joint power by using a tension-spring-like structure. Panizzolo et al. investigated a walking assistance system around the hip joint similar to the proposed optimal solution [8]. Zhou et al. developed a passive walking assistance system that assists the hip joint during walking and running [9]. The reason why walking assistance devices are concentrated on the ankle and hip joints to reduce the metabolic cost of walking is that the ankle and hip joints account for the largest share of the energy consumption during a gait cycle [22]. The walking assistance devices investigated by Panizzolo et al. [8] and Zhou et al. [9] assisted around 25–70% of the gait cycle according to experiments. The present study first identified the placement to determine the perfect supporting time and joints; then, the effect of walking speed on the optimal design was investigated by using only simulation-based design and optimization. The results obtained using multibody dynamics and optimization showed an agreement with the results of experimental studies and are promising for further applications related to walking assistance systems.
After determining the optimal location of the walking assistance system, the stiffness and free length of the spring were found at different walking speeds. The effects of walking speed on the optimal parameters were investigated by considering a speed-specific stiffness and a general stiffness value for all walking speeds. Having an optimal stiffness specific to a walking speed reduced the total positive joint energy more than the optimal parameters that considered different walking speeds, as shown in Figure 6. Because the position of the system was determined at a walking speed of 1.3 m/s, the maximum reduction in total positive joint power was achieved at 1.3 m/s. The differences between the speed-specific stiffness value and the general stiffness value mostly depended on the power consumption at different walking speeds, joint angles, and optimal force–displacement characteristics. Due to the higher consumption of power at higher walking speeds, the difference between the speed-specific design and the general design was smaller at walking speeds of 1.3 and 1.5 m/s. On the other hand, the force–displacement characteristics of the general design was similar to those of the speed-specific design at walking speeds of 1.1 and 1.3 m/s. This is the reason why the difference in the performance of the general design and the speed-specific design became smaller at 1.1 and 1.3 m/s.
The assistive moment characteristics should be adjusted or optimized to improve device personalization. The generated force on the springs and the moment arm are the parameters that determine the assistive moment generated by a spring system. Joint angles and the location and stiffness of the springs affect the generated force and moment arm. Previous studies on human gait showed that age, height, weight, and walking speed affect the kinematics [23,24,25]. Therefore, joint moments, joint angles, and body dimensions are important parameters that need to be considered during the personalization of the devices. The optimal parameters of the walking assistance system should be modified by considering the changes in walking patterns. Therefore, adaptable or active devices are expected to provide better support to further reduce the metabolic cost.
The scope of the study can be extended by considering different objective functions. For example, a muscle group may need to be improved for rehabilitation purposes. The placement and appropriate stiffness can be determined depending on the muscles. In addition, assistive systems to help with carrying loads can be designed in a similar manner.
There are some limitations of the present method. Because it was assumed that walking assistance devices have no significant effect on walking kinematics, the effects of walking assistance systems on the joint kinematics were not considered. Additionally, the walking assistance system was applied to the human body without any consideration of soft tissue movements, the movement of clothes, etc. Therefore, it is expected that a real system will provide a less reduction in energy consumptions than described by a simulation model.
5. Conclusions
In the present study, the placement and structural properties of a walking assistance system were optimized based on multibody dynamic analyses. A tension spring was used to model a walking assistance system on a 2D human walking model. A design space that described the location along the distal–proximal direction were defined. The placement of tension spring was determined by minimizing the total positive joint energy. It was found that the optimal placement to reduce the joint power is the hip joint. Then, the effects of walking speed on the optimal design of the walking assistance system were investigated. The total joint power was reduced up to 8.8% depending on the walking speed. It was also revealed that using a speed-specific stiffness produced slightly better performance compared with a system with a constant optimal stiffness regardless of walking speed. The present study showed that the placement and stiffness of the walking assistance systems can be determined using simulation and optimization. Although we focused on reducing the total positive joint energy, the scope of study can be extended by considering different objective functions and systems for different purposes such as rehabilitation or reducing the risk of falling. In the present study, the adaptation in joint kinematics was not considered. In a future study, the variations in walking with walking assistance devices can be obtained using predictive simulations.
Author Contributions
Conceptualization, C.G. and K.S.; methodology, C.G.; software, C.G.; validation, C.G., S.S., and K.S.; formal analysis, C.G.; investigation, C.G., S.S., and K.S.; resources, C.G.; data curation, C.G.; writing—original draft preparation, C.G.; writing—review and editing, C.G., S.S. and K.S.; visualization, C.G.; supervision, K.S.; project administration, K.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
All relevant data are within the manuscript and available from the corresponding author on request.
Acknowledgments
We would like to thank Hiroaki Hobara for his comments and contributions.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Freiberger, E.; Sieber, C.; Kob, R. Mobility in Older Community-Dwelling Persons: A Narrative Review. Front. Physiol. 2020, 11, 811. [Google Scholar] [CrossRef]
- Forhan, M.; Gill, S.V. Obesity, functional mobility and quality of life. Best Pract. Res. Clin. Endocrinol. Metab. 2013, 27, 129–137. [Google Scholar] [CrossRef] [PubMed]
- Fautrel, B.; Hilliquin, P.; Rozenberg, S.; Allaert, F.A.; Coste, P.; Leclerc, A.; Rossignol, M. Impact of osteoarthritis: Results of a nationwide survey of 10,000 patients consulting for OA. Jt. Bone Spine 2005, 72, 235–240. [Google Scholar] [CrossRef]
- Zhang, J.; Fiers, P.; Witte, K.; Jackson, R.W.; Poggensee, K.L.; Atkeson, C.G.; Collins, S.H. Human-in-the-loop optimization of exoskeleton assistance during walking. Science 2017, 356, 1280–1284. [Google Scholar] [CrossRef] [PubMed]
- Mooney, L.M.; Rouse, E.J.; Herr, H.M. Autonomous exoskeleton reduces metabolic cost of human walking during load carriage. J. Neuroeng. Rehabil. 2014, 11, 80. [Google Scholar] [CrossRef]
- Lee, H.; Lee, S.; Chang, W.H.; Seo, K.; Shim, Y.; Choi, B.; Ryu, G.; Kim, Y. A wearable hip assist robot can improve gait function and cardiopulmonary metabolic efficiency in elderly adults. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 1549–1557. [Google Scholar] [CrossRef] [PubMed]
- Collins, S.; Wiggin, M.; Sawicki, G. Reducing the energy cost of human walking using an unpowered exoskeleton. Nature 2015, 522, 212–215. [Google Scholar] [CrossRef]
- Panizzolo, F.A.; Annese, E.; Paoli, A.; Marcolin, G. A Single Assistive Profile Applied by a Passive Hip Flexion Device Can Reduce the Energy Cost of Walking in Older Adults. Appl. Sci. 2021, 11, 2851. [Google Scholar] [CrossRef]
- Zhou, T.; Xiong, C.; Zhang, J.; Hu, D.; Chen, W.; Huang, X. Reducing the metabolic energy of walking and running using an unpowered hip exoskeleton. J. Neuroeng. Rehabil. 2021, 18, 95. [Google Scholar] [CrossRef]
- Nuckols, R.W.; Sawicki, G.S. Impact of elastic ankle exoskeleton stiffness on neuromechanics and energetics of human walking across multiple speeds. J. Neuroeng. Rehabil. 2020, 17, 75. [Google Scholar] [CrossRef]
- Cheng, L.; Xiong, C.; Chen, W.; Liang, J.; Huang, B.; Xu, X. A portable exotendon assisting hip and knee joints reduces muscular burden during walking. R. Soc. Open Sci. 2021, 8, 211266. [Google Scholar] [CrossRef] [PubMed]
- Nasiri, R.; Ahmadi, A.; Ahmadabadi, M.N. Reducing the energy cost of human running using an unpowered exoskeleton. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 2026–2032. [Google Scholar] [CrossRef] [PubMed]
- Yong, X.; Yan, Z.; Wang, C.; Wang, C.; Li, N.; Wu, X. Ergonomic Mechanical Design and Assessment of a Waist Assist Exoskeleton for Reducing Lumbar Loads During Lifting Task. Micromachines 2019, 10, 463. [Google Scholar] [CrossRef] [PubMed]
- Qu, X.; Qu, C.; Ma, T.; Yin, P.; Zhao, N.; Xia, Y.; Qu, S. Effects of an industrial passive assistive exoskeleton on muscle activity, oxygen consumption and subjective responses during lifting tasks. PLoS ONE 2021, 16, e0245629. [Google Scholar] [CrossRef]
- Sawicki, G.S.; Beck, O.N.; Kang, I.; Young, A.J. The exoskeleton expansion: Improving walking and running economy. J. Neuroeng. Rehabil. 2020, 17, 25. [Google Scholar] [CrossRef] [PubMed]
- Schrack, J.A.; Simonsick, E.M.; Chaves, P.H.M.; Ferrucci, L. The role of energetic cost in the age-related slowing of gait speed. J. Am. Geriatr. Soc. 2021, 60, 1811–1816. [Google Scholar] [CrossRef] [PubMed]
- Awad, L.N.; Bae, J.; O’Donnell, K.; De Rossi, S.M.M.; Hendron, K.; Sloot, L.H.; Kudzia, P.; Allen, S.; Holt, K.G.; Ellis, T.D.; et al. A soft robotic exosuit improves walking in patients after stroke. Sci. Transl. Med. 2017, 9, eaai9084. [Google Scholar] [CrossRef] [PubMed]
- Miller-Jackson, T.M.; Natividad, R.F.; Lim, D.Y.L.; Hernandez-Barraza, L.; Ambrose, J.W.; Yeow, R.C.H. A Wearable Soft Robotic Exoskeleton for Hip Flexion Rehabilitation. Front. Robot. AI 2022, 9, 835237. [Google Scholar] [CrossRef]
- Etenzi, E.; Borzuola, R.; Grabowski, A.M. Passive-elastic knee-ankle exoskeleton reduces the metabolic cost of walking. J. Neuroeng. Rehabil. 2020, 17, 104. [Google Scholar] [CrossRef]
- Dembia, C.L.; Silder, A.; Uchida, T.K.; Hicks, J.L.; Delp, S.L. Simulating ideal assistive devices to reduce the metabolic cost of walking with heavy loads. PLoS ONE 2017, 12, e0180320. [Google Scholar] [CrossRef]
- Guzelbulut, C.; Shimono, S.; Suzuki, K. Optimization of human gait using singular-value decomposition-based design variables. Multibody Syst. Dyn. 2023. [Google Scholar] [CrossRef]
- Farris, D.J.; Sawicki, G.S. The mechanics and energetics of human walking and running: A joint level perspective. J. R. Soc. Interface 2012, 9, 110–118. [Google Scholar] [CrossRef] [PubMed]
- Guzelbulut, C.; Shimono, S.; Yonekura, K.; Suzuki, K. Detection of gait variations by using artificial neural networks. Biomed. Eng. Lett. 2022, 12, 369–379. [Google Scholar] [CrossRef] [PubMed]
- Guzelbulut, C.; Suzuki, K.; Shimono, S. Singular value decomposition-based gait characterization. Heliyon 2022, 8, e12006. [Google Scholar] [CrossRef] [PubMed]
- Moissenet, F.; Leboeuf, F.; Armand, S. Lower limb sagittal gait kinematics can be predicted based on walking speed, gender, age and BMI. Sci. Rep. 2019, 9, 9510. [Google Scholar] [CrossRef]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).