
Detection of Underwater Targets Using Polarization Laser Assisted Echo Detection Technique


Abstract
:1. Introduction
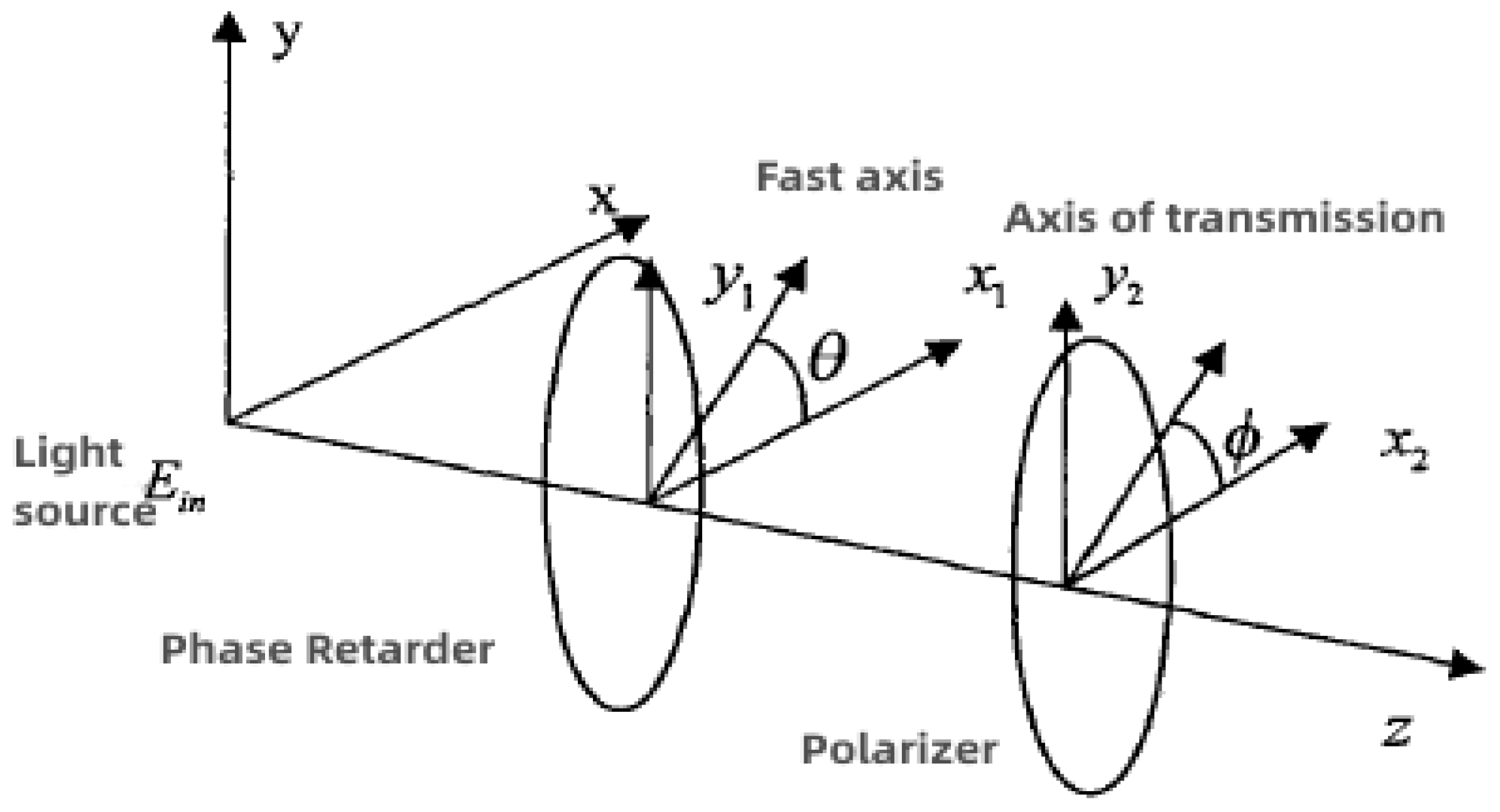
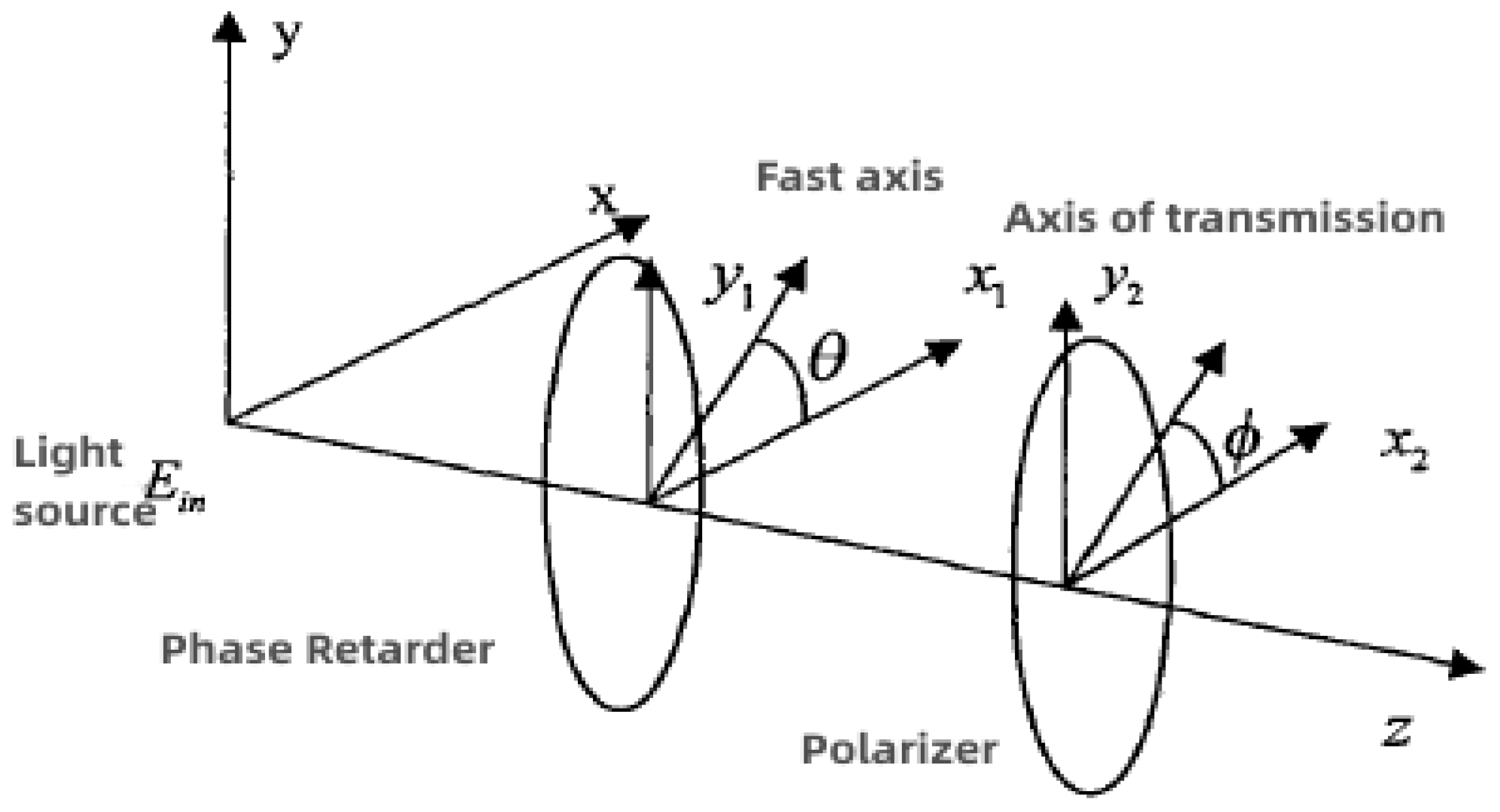
2. Underwater Target Polarization Detection Mechanism
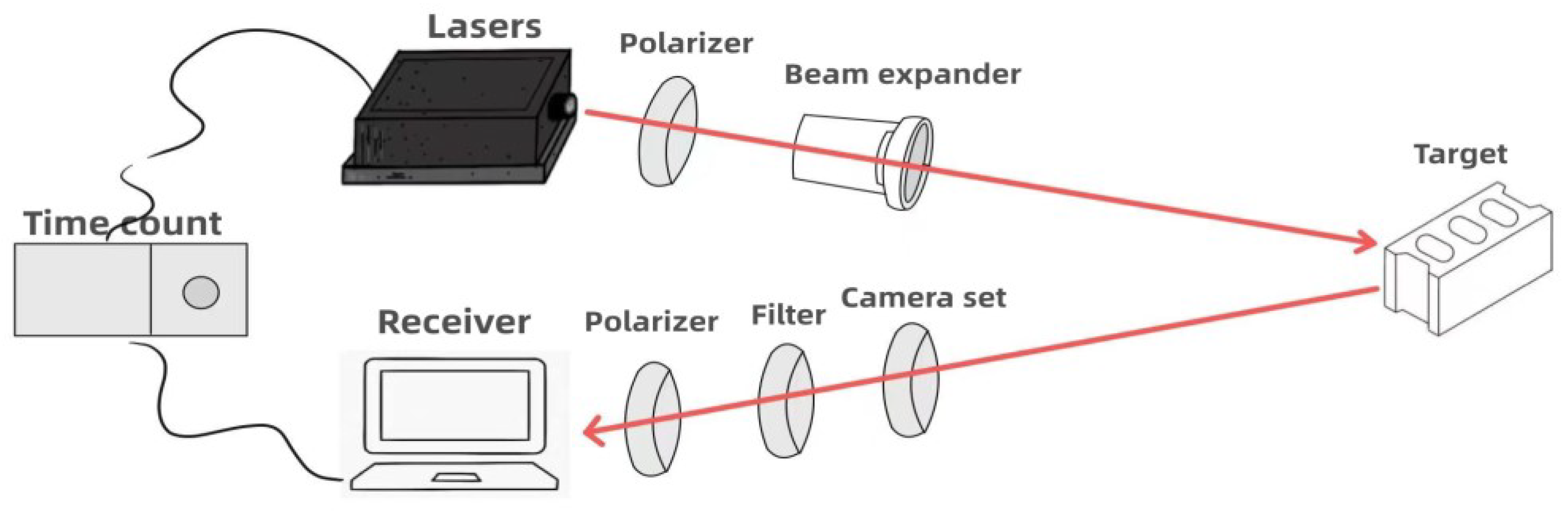
3. Underwater Target Polarization Detection System and Experimental Scheme
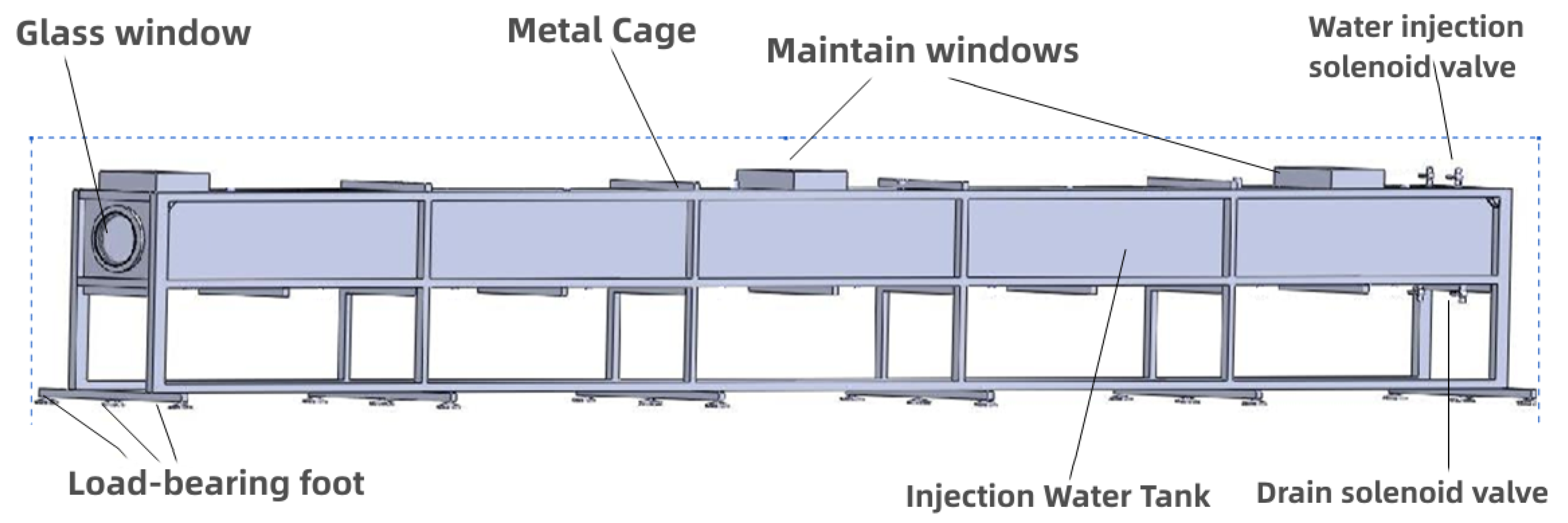
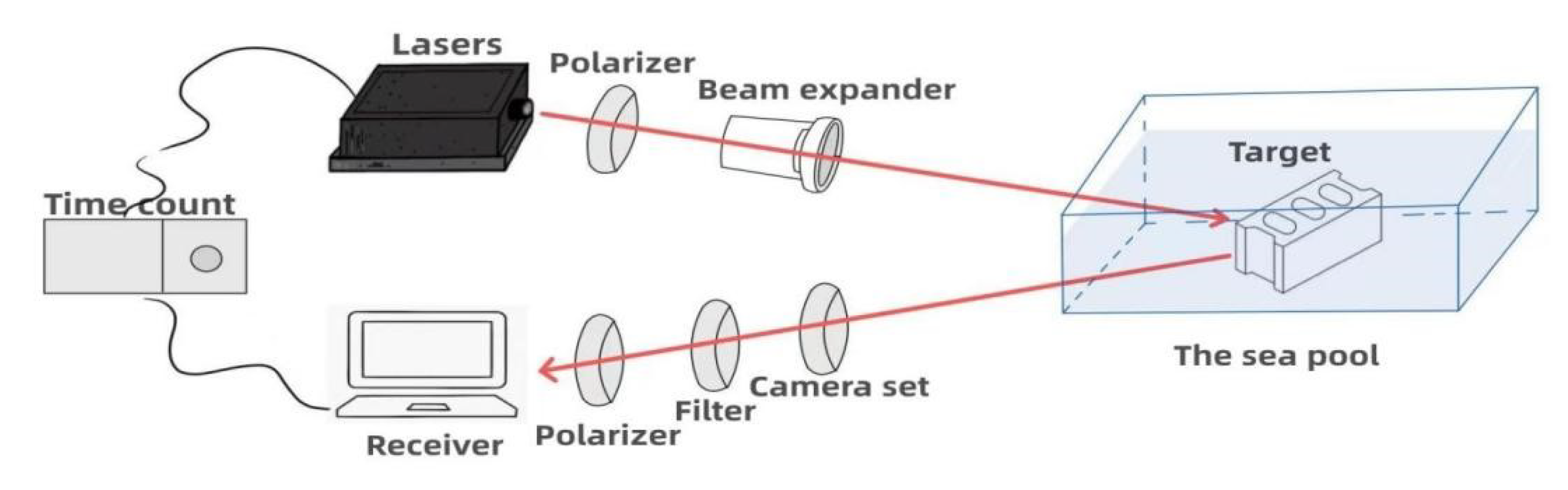
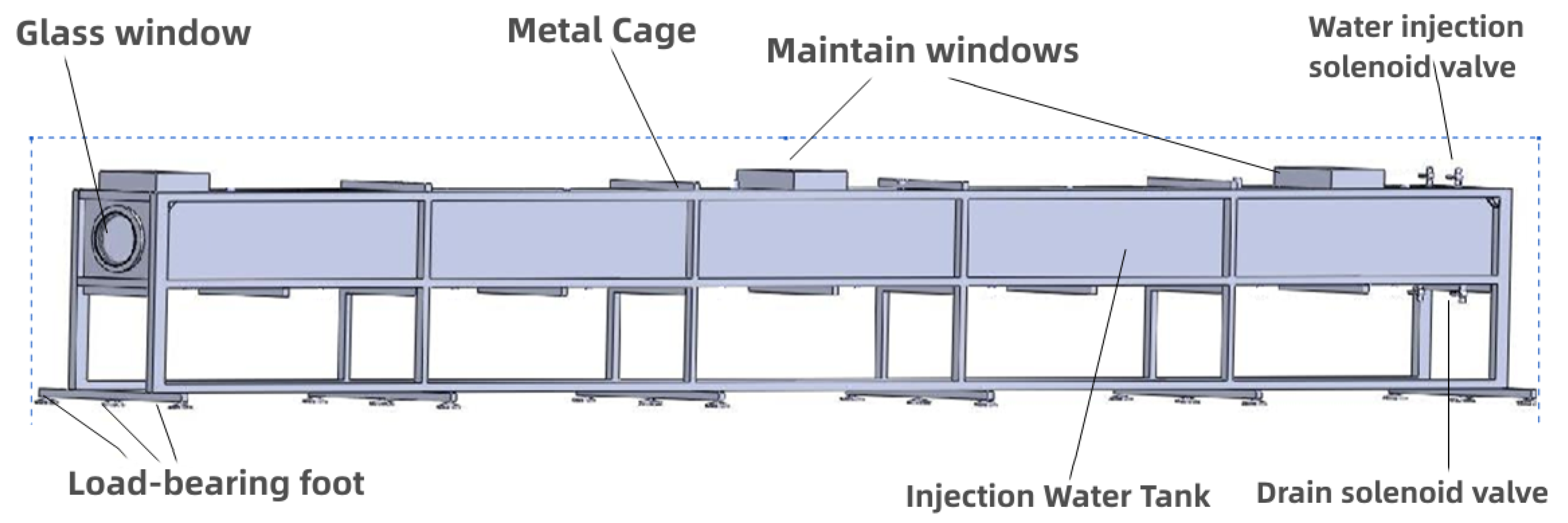
3.1. Setting Up and Testing of the Experimental Environment
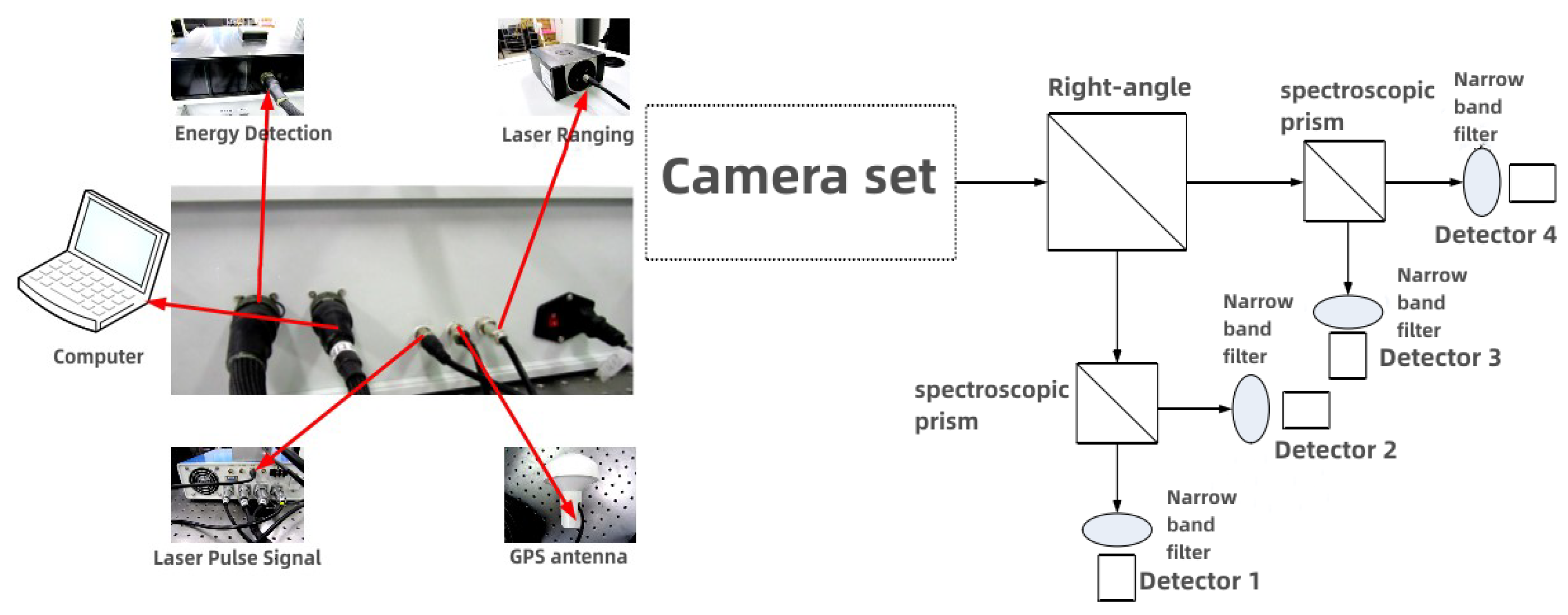
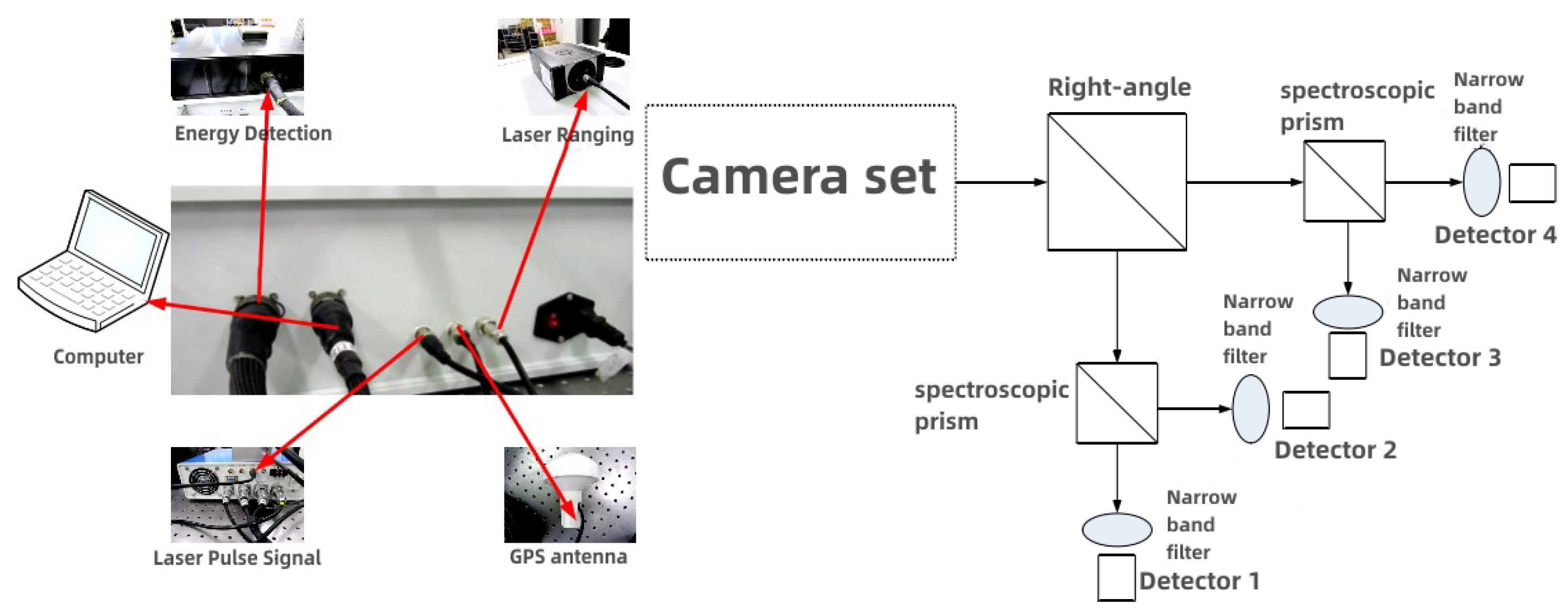
3.2. Energy Test and Polarization Test
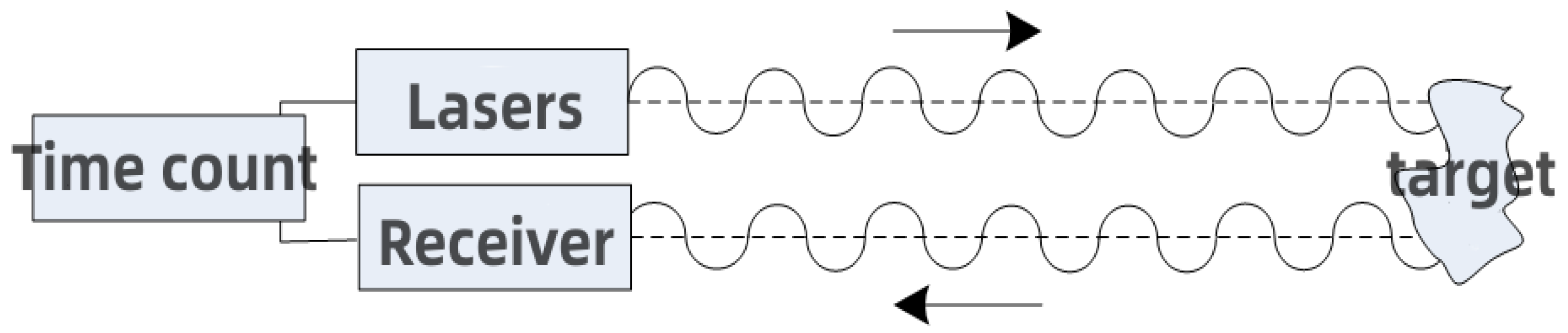
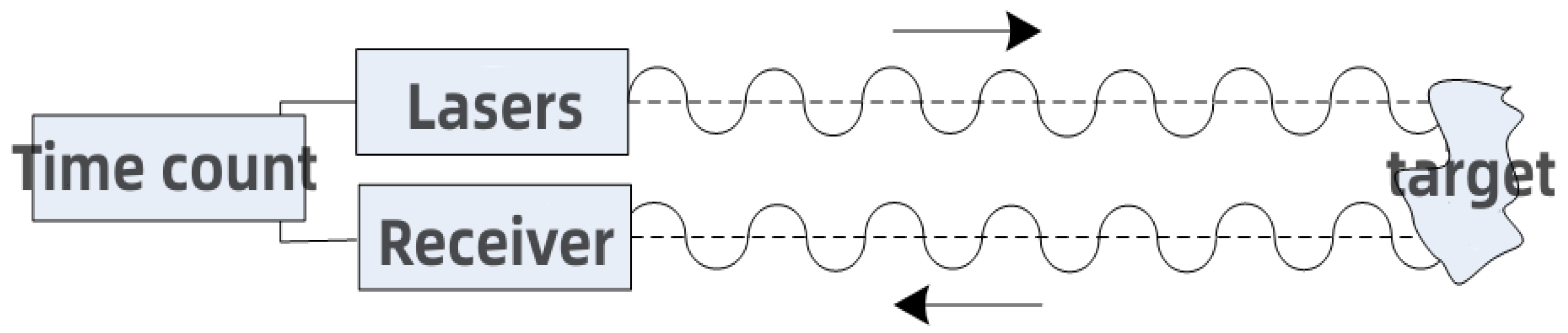
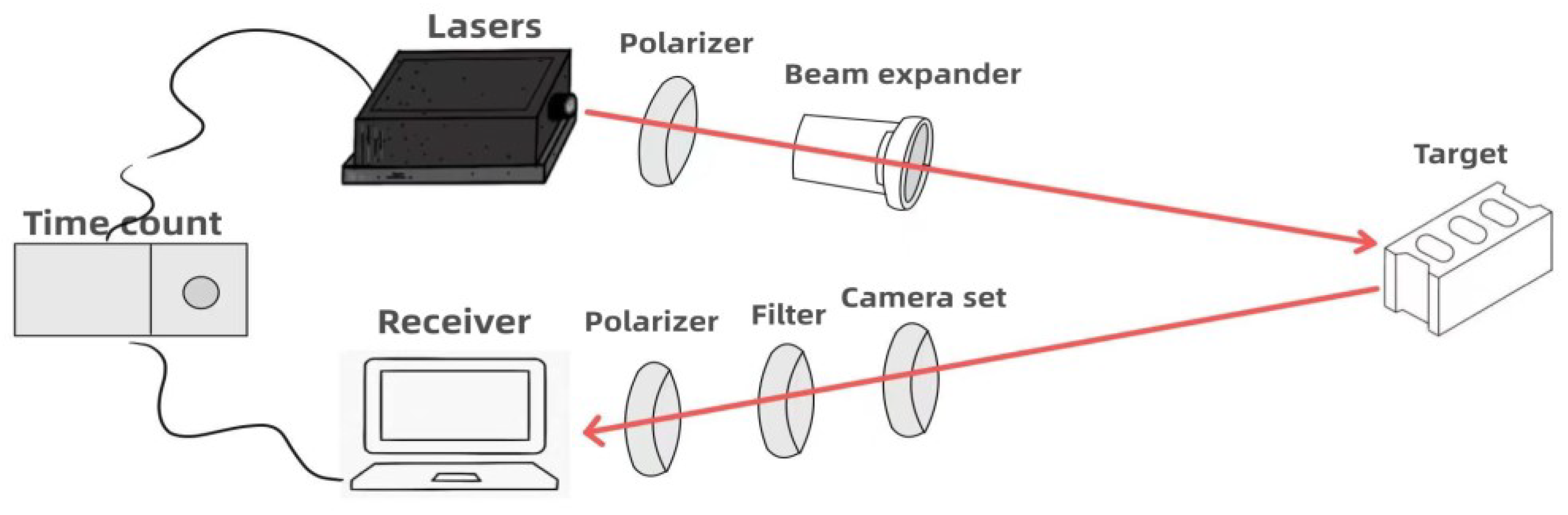
3.3. Distance Test and Location Test
4. Results and Analysis
4.1. The Influence of Polarization Characterization
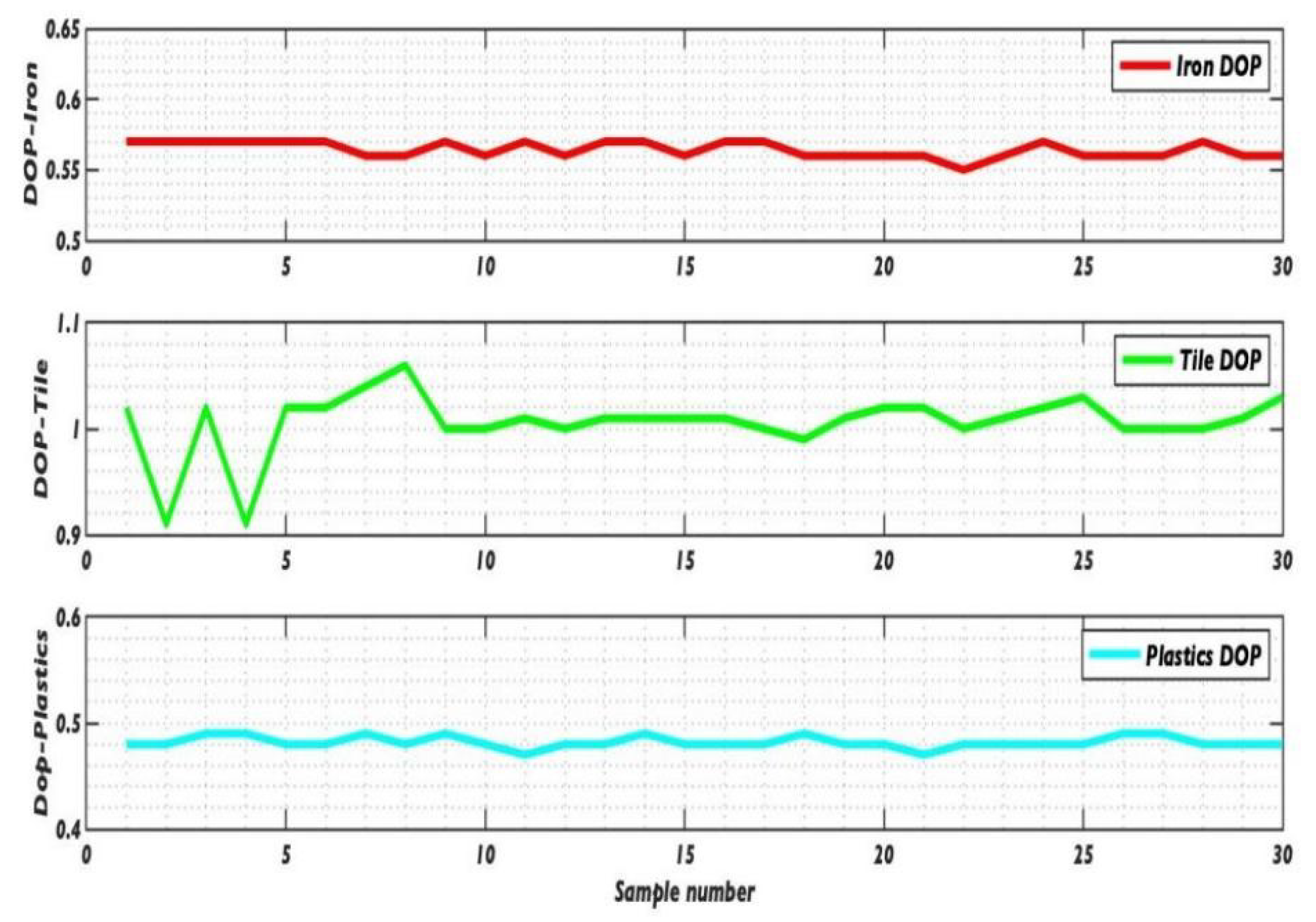
4.2. Effect of Different Objects on the Degree of Polarization under the Same Environment
4.3. The Influence of the Same Object on the Degree of Polarization in Different Environments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, Z.; Wang, H.; Shen, J.; Xu, L. Underwater target detection based on intensity-spectrum-polarization information fusion. J. Commun. 2013, 34, 7. [Google Scholar]
- Bao, F.; Duan, J.; Dong, S.; Ma, L.; Yu, T.; Zhan, J. Study on polarization imaging characteristics of underwater targets. J. Appl. Opt. 2019, 40, 27–32. [Google Scholar]
- Liu, F.; Sun, S.; Han, P.; Yang, K.; Shao, X. Research and development of underwater polarization imaging technology. Adv. Laser Optoelectron. 2021, 58, 18. [Google Scholar]
- Chiu, W.; Dai, H.; Shin, L.; Zhang, J. Overview of underwater polarization sharp imaging methods. Infrared Laser Eng. 2020, 49, 11. [Google Scholar]
- Li, Y.-C.; Wang, C.; An, Y.; Shao, Y.; Hu, Y. Research of laser and infrared polarization detection technology for underwater moving stealth target. Laser Infrared 2016, 46, 209–213. [Google Scholar]
- Yang, F.; Wang, C.; Pang, G.; Liu, H.F.; Wang, C.; Pang, G. Design of underwater detector optical system based on polarization technology. J. Chang. Univ. Sci. Technol. Nat. Sci. Ed. 2018, 41, 4. [Google Scholar]
- Wang, L. Polarization Imaging Detection of Underwater Target Based on Laser; Changchun University of Science and Technology: Changchun, China, 2019. [Google Scholar]
- Liu, X.; Wang, F. Research on detection method of camouflage target based on polarization characteristics. Opt. Technol. 2008, 34, 4. [Google Scholar]
- Cao, N. Quantitative Study of Improvements of the Imaging Contrast and Imaging Range by the Polarization Technique. Acta Phys. Sin. 2000, 49, 65–66. [Google Scholar]
- Xiang, Y. Maxwell's theory of electromagnetic fields. Physics 1991, 20, 6. [Google Scholar]
- Qin, Z.; Cheng, Z.; Zhang, Z.; Zhu, J. High-speed real-time measurement of polarized light Sir George Stokes, 1st Baronet Parameters. J. Opt. 2007, 27, 4. [Google Scholar]
- Kong, W.; Li, G. Using Stokes vector and Muller matrix to determine the ratio of azimuth to major axis of elliptically polarized light. Appl. Opt. 2002, 23, 3. [Google Scholar]
- Sun, X.; Lee, H.; Tang, L. Study on polarization degree of visible and infrared light scattering from atmosphere. J. Opt. 2011, 31, 6. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Energy Point (J) | Probe 1 | Probe 2 | Probe 3 | Probe 4 | Inconsistency |
|---|---|---|---|---|---|
| 2.93 × 10−12 | 3.12 × 10−12 | 3.02 × 10−12 | 3.12 × 10−12 | 2.97 × 10−12 | ±2.5% |
| 5.85 × 10−12 | 5.94 × 10−12 | 5.81 × 10−12 | 6.06 × 10−12 | 5.85 × 10−12 | ±2.1% |
| 2.34 × 10−11 | 2.35 × 10−11 | 2.28 × 10−11 | 2.30 × 10−11 | 2.25 × 10−11 | ±3.1% |
| 1.42 × 10−10 | 1.42 × 10−10 | 1.39 × 10−10 | 1.43 × 10−10 | 1.43 × 10−10 | ±1.4% |
| 3.47 × 10−10 | 3.54 × 10−10 | 3.48 × 10−10 | 3.47 × 10−10 | 3.40 × 10−10 | ±2.0% |
| 1.28 × 10−9 | 1.31 × 10−9 | 1.25 × 10−9 | 1.28 × 10−9 | 1.28 × 10−9 | ±2.4% |
| 3.16 × 10−9 | 3.17 × 10−9 | 3.07 × 10−9 | 3.10 × 10−9 | 3.03 × 10−9 | ±2.3% |
| 6.77 × 10−9 | 7.17 × 10−9 | 7.00 × 10−9 | 7.16 × 10−9 | 7.19 × 10−9 | ±1.4% |
| Serial Number | Distance (m) | 0° (J) | 45° (J) | 90° (J) | 135° (J) | I | Q | U | DOP | Aop |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 (Iron) | 11.029 | 1.83× 10−9 | 9.7 × 10−10 | 2.48 × 10−9 | 3.34 × 10−9 | 4.31 × 10−9 | −6.43 × 10−10 | −2.37 × 10−9 | 0.57 | 37.40 |
| 2 (Iron) | 11.029 | 1.76 × 10−9 | 9.3 × 10−10 | 2.37 × 10−9 | 3.19 × 10−9 | 4.13 × 10−9 | −6.11 × 10−10 | −2.26 × 10−9 | 0.57 | 37.43 |
| 3 (Iron) | 11.029 | 1.66 × 10−9 | 8.75 × 10−10 | 2.23 × 10−9 | 3 × 10−9 | 3.88 × 10−9 | −5.68 × 10−10 | −2.13 × 10−9 | 0.57 | 37.52 |
| 4 (Tiles) | 11.033 | 7.01 × 10−11 | 3.3 × 10−11 | 1.98 × 10−10 | 2.45 × 10−10 | 2.73 × 10−10 | −1.28 × 10−10 | −2.12 × 10−10 | 0.91 | 29.48 |
| 5 (Tiles) | 11.033 | 6.07 × 10−11 | 2.92 × 10−11 | 7.43 × 10−11 | 2.3 × 10−10 | 1.97 × 10−10 | −1.36 × 10−11 | −2.01 × 10−10 | 1.02 | 43.07 |
| 6 (Tiles) | 11.034 | 6 × 10−11 | 2.87 × 10−11 | 7.35 × 10−11 | 2.28 × 10−10 | 1.95 × 10−10 | −1.35 × 10−11 | −1.99 × 10−10 | 1.02 | 43.07 |
| 7 (plastic) | 11.033 | 2.48 × 10−10 | 2.42 × 10−10 | 3.76 × 10−10 | 5.65 × 10−10 | 7.15 × 10−10 | −1.28 × 10−10 | −3.23 × 10−10 | 0.49 | 34.16 |
| 8 (plastic) | 11.034 | 2.48 × 10−10 | 2.44 × 10−10 | 3.78 × 10−10 | 5.66 × 10−10 | 7.18 × 10−10 | −1.29 × 10−10 | −3.22 × 10−10 | 0.48 | 34.05 |
| 9 (plastic) | 11.033 | 2.66 × 10−10 | 2.52 × 10−10 | 3.97 × 10−10 | 5.97 × 10−10 | 7.57 × 10−10 | −1.30 × 10−10 | −3.45 × 10−10 | 0.49 | 34.64 |
| Serial Number | Distance (m) | 0° (J) | 45° (J) | 90° (J) | 135° (J) | I | Q | U | DOP | AOP |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 (Iron) | 3.558 | 6.85 × 10−11 | 3.19 × 10−11 | 8.2 × 10−11 | 2.2368 × 10−10 | 2.03 × 10−10 | −1.35 × 10−11 | −1.92 × 10−10 | 0.95 | 42.99 |
| 2 (Iron) | 3.558 | 6.67 × 10−11 | 3.08 × 10−11 | 7.97 × 10−11 | 2.2157 × 10−10 | 1.99 × 10−10 | −1.30 × 10−11 | −1.91 × 10−10 | 0.96 | 43.05 |
| 3 (Iron) | 3.557 | 5.81 × 10−11 | 2.72 × 10−11 | 7.1 × 10−11 | 2.1121 × 10−10 | 1.84 × 10−10 | −1.29 × 10−11 | −1.84 × 10−10 | 1.00 | 43.00 |
| 4 (Tiles) | 3.475 | 1.08 × 10−10 | 5.28 × 10−11 | 2.43 × 10−10 | 3.04 × 10−10 | 3.54 × 10−10 | −1.35 × 10−10 | −2.51 × 10−10 | 0.81 | 30.91 |
| 5 (Tiles) | 3.475 | 1.12 × 10−10 | 5.52 × 10−11 | 2.48 × 10−10 | 3.12 × 10−10 | 3.64 × 10−10 | −1.36 × 10−10 | −2.57 × 10−10 | 0.80 | 31.08 |
| 6 (Tiles) | 3.475 | 1.09 × 10−10 | 5.27 × 10−11 | 2.44 × 10−10 | 3.04 × 10−10 | 3.55 × 10−10 | −1.36 × 10−10 | −2.52 × 10−10 | 0.81 | 30.83 |
| 7 (plastic) | 3.351 | 7.3 × 10−10 | 4.59 × 10−10 | 7.84 × 10−10 | 1.19 × 10−9 | 1.58 × 10−9 | −5.40 × 10−11 | −7.28 × 10−10 | 0.46 | 42.88 |
| 8 (plastic) | 3.351 | 7.09 × 10−10 | 4.55 × 10−10 | 7.66 × 10−10 | 1.16 × 10−9 | 1.55 × 10−9 | −5.75 × 10−11 | −7.06 × 10−10 | 0.46 | 42.67 |
| 9 (plastic) | 3.351 | 7.6 × 10−10 | 4.77 × 10−10 | 8.18 × 10−10 | 1.24 × 10−9 | 1.65 × 10−9 | −5.83 × 10−11 | −7.64 × 10−10 | 0.46 | 42.82 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Y.; He, Q.; Fu, Q.; Dong, C.; Liu, J.; Duan, J. Detection of Underwater Targets Using Polarization Laser Assisted Echo Detection Technique. Appl. Sci. 2023, 13, 3222. https://doi.org/10.3390/app13053222
Zhu Y, He Q, Fu Q, Dong C, Liu J, Duan J. Detection of Underwater Targets Using Polarization Laser Assisted Echo Detection Technique. Applied Sciences. 2023; 13(5):3222. https://doi.org/10.3390/app13053222
Chicago/Turabian StyleZhu, Yong, Qingyi He, Qiang Fu, Chao Dong, Jianhua Liu, and Jin Duan. 2023. "Detection of Underwater Targets Using Polarization Laser Assisted Echo Detection Technique" Applied Sciences 13, no. 5: 3222. https://doi.org/10.3390/app13053222
APA StyleZhu, Y., He, Q., Fu, Q., Dong, C., Liu, J., & Duan, J. (2023). Detection of Underwater Targets Using Polarization Laser Assisted Echo Detection Technique. Applied Sciences, 13(5), 3222. https://doi.org/10.3390/app13053222